УРОВЕНЬ ТЕХНИКИ
Системы транспортных средств принимают различные команды водителя, для того чтобы помогать водителю управлять силовой передачей, в том числе входной сигнал положения педали акселератора. Кроме того, зависимость между величиной нажатия педали водителем и реакцией силовой передачи может регулироваться, чтобы предусматривать разные управления скоростью и крутящим моментом.
Один из примерных подходов к регулированию отображения положения педали предложен Вебером и другими в патенте США 6654677. В нем, контроллер силовой передачи изменяет отображение положения педали акселератора в угол электронного дросселя на основании скорости транспортного средства для улучшения контроля водителя над скоростью транспортного средства, выходным крутящим моментом и ускорением. В частности, на более низких скоростях транспортного средства положение педали отображается в угол электронного дросселя с сосредоточением на обеспечении управления ускорением, в то время как на более высоких скоростях транспортного средства, положение педали отображается в угол электронного дросселя с сосредоточением на управлении скоростью транспортного средства.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Однако авторы в материалах настоящей заявки идентифицировали потенциальные проблемы у такого подхода. В качестве примера, когда транспортное средство движется в районах переменного возвышения, отображение положения педали по Веберу и другим может давать слишком маленький крутящий момент или слишком большой крутящий момент. Например, на уклоне вверх по склону дополнительное перемещение педали может требоваться для обеспечения одинакового управления скоростью, ускорением или крутящим моментом во время восходящего движения на уклоне. Подобным образом, на уклоне вниз по склону меньшее перемещение педали может требоваться для обеспечения одного и того же управления скоростью, ускорением или крутящим моментом во время нисходящего движения на уклоне. В качестве еще одного примера, даже если транспортное средство не движется на уклоне вверх по склону или вниз по склону, такие же проблемы могут возникать в присутствие встречных ветров или попутных ветров. Во время таких условий работы водителю может требоваться быть особенно внимательным и может требоваться часто перестраивать величину нажатия педали, применяемого без понимания, сколько необходимо, чтобы поддерживать требуемую скорость транспортного средства (или ускорение транспортного средства). По существу, это может ухудшать ощущение от вождения и приводить к недовольству водителя.
По меньшей мере некоторые из вышеприведенных проблем могут быть решены способом управления двигателем транспортного средства, способом для двигателя транспортного средства и системой транспортного средства.
Согласно одному аспекту предложен способ управления двигателем транспортного средства, включающий регулирование зависимости между величиной нажатия педали акселератора водителем и выходным крутящим моментом двигателя на основании уклона движения транспортного средства. Таким образом, посредством регулирования зависимости между входным сигналом педали и мощностью на выходе транспортного средства с использованием показания возвышения колеи, величина усилий водителя, требуемых для сохранения уровня рабочих характеристик транспортного средства, снижается.
Способ предпочтительно дополнительно включает регулирование выходного крутящего момента двигателя на основании отрегулированной зависимости, при этом регулирование включает изменение зависимости так, чтобы она имела больший коэффициент передачи между величиной нажатия педали акселератора водителем и выходным крутящим моментом двигателя во время движения вверх по склону, и меньший коэффициент передачи между величиной нажатия педали водителем и выходным крутящим моментом двигателя во время движения вниз по склону.
Коэффициент передачи предпочтительно увеличивается при увеличении уклона вверх по склону и уменьшается при увеличении уклона движения вниз по склону.
Регулирование предпочтительно включает увеличение выходного крутящего момента двигателя с первой, более низкой интенсивностью при нажатии педали водителем на более низком возвышении, и увеличение выходного крутящего момента двигателя со второй, более высокой интенсивностью при нажатии педали водителем на более высоком возвышении.
Зависимость предпочтительно дополнительно регулируется на основании присутствия встречного ветра или попутного ветра.
Дополнительное регулирование предпочтительно включает увеличение выходного крутящего момента двигателя при нажатии педали водителем, если присутствует встречный ветер, и уменьшение выходного крутящего момента двигателя при нажатии педали водителем, если присутствует попутный ветер.
Интенсивность увеличения предпочтительно основана на скорости и направлении встречного ветра, а интенсивность уменьшения основана на скорости и направлении попутного ветра.
Зависимость предпочтительно регулируется во время режимов транспортного средства без пробуксовки и крейсерского движения.
Зависимость предпочтительно регулируется в большей степени при более низких положениях педали, чем при более высоких положениях педали.
Зависимость предпочтительно регулируется в большей степени при средних положениях педали, чем при любых из более низких положений педали или более высоких положений педали.
Выходной крутящий момент двигателя предпочтительно регулируется регулированием положения дроссельной заслонки с электронным управлением.
Зависимость предпочтительно дополнительно регулируется на основании нагрузки транспортного средства относительно номинальной нагрузки транспортного средства, при этом нагрузка транспортного средства включает в себя нагрузку, перевозимую и/или буксируемую транспортным средством, а регулирование заключается в том, что при превышении нагрузкой транспортного средства номинальной нагрузки транспортного средства увеличивают мощность на выходе двигателя для данной величины нажатия педали.
Согласно другому аспекту предложен способ для двигателя транспортного средства, включающий, во время первого состояния без регулирования тягового усилия, регулирование выходного крутящего момента двигателя в ответ на величину нажатия педали водителем на основании возвышения дороги и, во время второго состояния с регулированием тягового усилия, регулирование выходного крутящего момента двигателя в ответ на величину нажатия педали водителем на основании пробуксовки колес.
Первое состояние без регулирования тягового усилия предпочтительно включает в себя одно или более из: не во время управления скоростью транспортного средства, не во время управления пробуксовкой транспортного средства и не во время управления тяговым усилием транспортного средства.
Регулирование во время первого состояния без регулирования тягового усилия предпочтительно заключается в том, что, когда транспортное средство движется на первом, более низком возвышении, выдают первый меньший выходной крутящий момент двигателя в ответ на величину нажатия педали водителем, а когда транспортное средство движется на втором более высоком возвышении, выдают второй больший выходной крутящий момент двигателя в ответ на величину нажатия педали водителем.
Способ предпочтительно дополнительно включает, во время первого состояния без регулирования тягового усилия, дополнительное регулирование выходного крутящего момента двигателя в ответ на величину нажатия педали водителем на основании встречного ветра или попутного ветра, при этом регулирование заключается в том, что, когда транспортное средство движется в присутствии встречного ветра, увеличивают выходной крутящий момент двигателя в ответ на величину нажатия педали водителем, а когда транспортное средство движется в присутствии попутного ветра, уменьшают выходной крутящий момент двигателя в ответ на величину нажатия педали водителем.
Во время второго состояния с регулированием тягового усилия регулирование на основании пробуксовки колес предпочтительно заключается в том, что осуществляют регулирование на основании возвышения дороги, коэффициента трения колеи и состояния шин транспортного средства для снижения пробуксовки колес.
Согласно еще одному аспекту предложена система транспортного средства, содержащая педаль, выполненную с возможностью приема команды от водителя транспортного средства, датчик, выполненный с возможностью выдачи выходного сигнала на основании нажатия педали водителем, и систему управления с машинно-читаемыми командами для регулирования выходного крутящего момента двигателя в ответ на нажатие педали водителем на основании уклона движения.
Регулирование предпочтительно включает, во время движения вверх по склону, увеличение коэффициента передачи между величиной нажатия педали водителем и выходным крутящим моментом двигателя, при этом коэффициент передачи увеличивается при увеличении уклона движения вверх по склону и, во время движения вниз по склону, уменьшение коэффициента передачи между величиной нажатия педали водителем и выходным крутящим моментом двигателя, причем коэффициент передачи уменьшается при увеличении уклона движения вниз по склону.
Система управления предпочтительно выполнена с возможностью дополнительного регулирования выходного крутящего момента двигателя в ответ на встречный ветер или попутный ветер, присутствующий во время движения транспортного средства, при этом коэффициент передачи дополнительно увеличивается, если присутствует встречный ветер, и дополнительно уменьшается, если присутствует попутный ветер.
Система управления предпочтительно выполнена с возможностью дополнительного регулирования выходного крутящего момента двигателя в ответ на нагрузку транспортного средства, перевозимую или буксируемую транспортным средством, при этом коэффициент передачи дополнительно увеличивается при превышении нагрузкой транспортного средства номинальной нагрузки транспортного средства.
Система предпочтительно дополнительно содержит дроссельную заслонку с электронным управлением, при этом система управления включает в себя команды для регулирования выходного крутящего момента двигателя посредством регулирования положения дроссельной заслонки с электронным управлением.
В одном из примеров, при движении транспортного средства по плоскости с верхним наклоном, зависимость между входным сигналом педали и выходным крутящим моментом двигателя может адаптироваться более высоким коэффициентом передачи на основании движения на уклоне вверх по склону. Это позволяет транспортному средству выдавать более высокий выходной крутящий момент для данного нажатия педали при подъеме вверх по склону и уменьшать дополнительный момент на педали, требуемый от водителя. В качестве еще одного примера, когда транспортное средство движется по плоскости с нижним наклоном, зависимость между входным сигналом педали и выходным крутящим моментом двигателя может адаптироваться более низким коэффициентом передачи на основании движения на уклоне вниз по склону. Это позволяет транспортному средству выдавать более низкий выходной крутящий момент для данного нажатия педали при спуске вниз по склону и снижать частое перерегулирование педали, требуемое от водителя. Подобные регулирования также могут производиться в присутствии встречных ветров или попутных ветров, так чтобы восприятие рабочих характеристик транспортного средства водителем не ухудшалось. Подобным образом, регулирования могут производиться, чтобы компенсировать влияния нагрузки на транспортное средство, такой как когда транспортное средство является буксирующим или везущим груз или полезную нагрузку, поскольку номинальная зависимость между входным сигналом педали и выходным крутящим моментом двигателя может быть основана на предположении ненагруженного транспортного средства.
Следует отметить, что зависимость между входным сигналом педали водителя и мощностью на выходе транспортного средства и/или двигателя может регулироваться множеством способов, включая постепенное регулирование зависимости по мере того, как изменяются условия окружающей среды, а также дополнительное регулирование зависимости на основании различных рабочих параметров, таких как число оборотов двигателя, скорость транспортного средства, передаточное отношение и т.д. Кроме того, регулирование коэффициента передачи может включать в себя настройку программных функций преобразования, алгоритмов, аналоговых схем, обработки сигналов и/или их комбинации.
Таким образом, величина дополнительных усилий водителя, требуемых для управления транспортным средством, в то время как изменяется уклон дороги, может быть уменьшена. По существу, это может улучшать восприятие водителем рабочих характеристик и общего впечатления от вождения.
Вышеприведенные преимущества и другие преимущества и признаки настоящего описания станут труда очевидны из последующего подробного описания изобретения при прочтении в одиночку или вместе с прилагаемыми чертежами. Следует понимать, что раскрытие изобретения, приведенное выше, предоставлено для ознакомления с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Она не идентифицирует ключевые или существенные признаки заявленного предмета изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание.
Более того, заявленный предмет изобретения не ограничен вариантами осуществления, которые решают какие-либо недостатки, отмеченные выше или в любой части этого описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 представляет собой схематичный вид примерного варианта осуществления системы двигателя согласно настоящему изобретению;
Фиг. 2-3 представляют собой примерные процедуры, которые могут быть реализованы для регулирования отображения положения педали для системы двигателя по фиг. 1;
Фиг. 4A-B представляют собой графики, иллюстрирующие примерные регулирования коэффициента передачи педали, которые могут выполняться в ответ на изменение возвышения дороги;
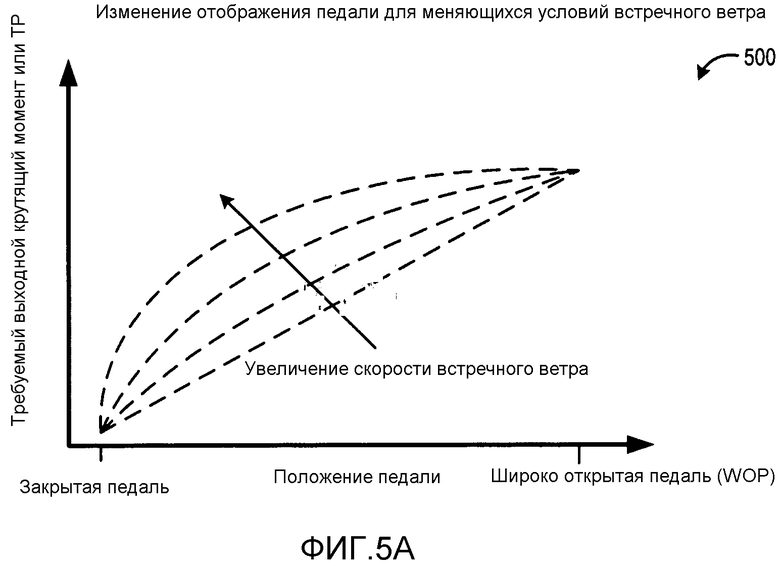
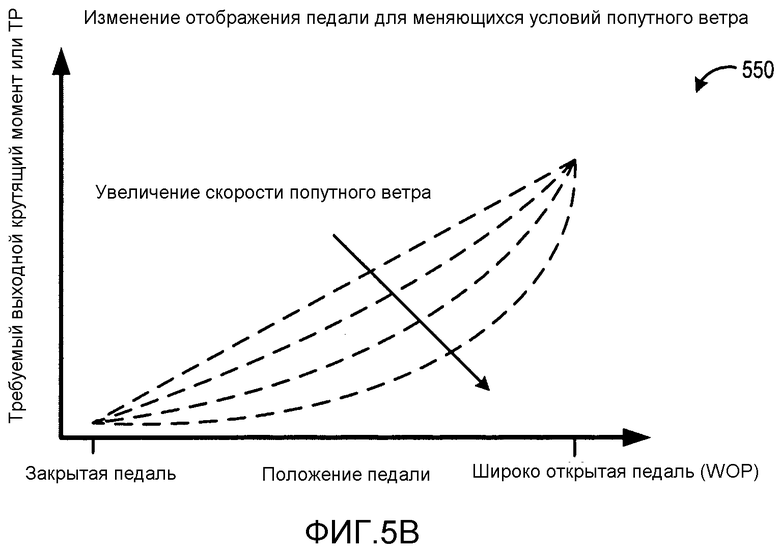
Фиг. 5A-B представляют собой графики, иллюстрирующие примерные регулирования коэффициента передачи педали, которые могут выполняться в ответ на присутствие встречных ветров, попутных ветров или нагрузки транспортного средства;
Фиг. 6 иллюстрирует отображение поворота ступни водителя, требуемого для поддержания скорости транспортного средства в условиях номинального уклона дороги;
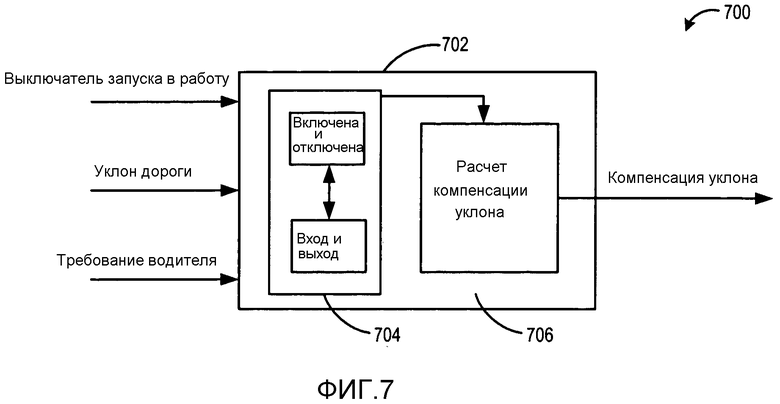
Фиг. 7 представляет собой примерную структурную схему, изображающую алгоритм компенсации уклона, применяемый для регулирования отображения положения педали; и
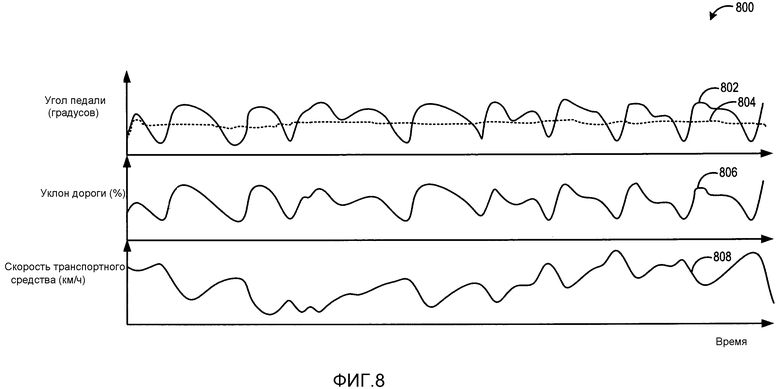
Фиг. 8 иллюстрирует примерное отображение компенсированной уклоном регулирования педали с использованием алгоритма компенсации уклона по фиг. 7.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В настоящей заявке описаны способы и системы для регулирования зависимости между сигналом педали акселератора и выходного крутящего момента двигателя в системе двигателя по фиг. 1. Контроллер двигателя может отображать сигнал педали акселератора в выходной крутящий момент двигателя и дополнительно регулировать отображение элементом адаптации, который основан на выбранных условиях работы двигателя. Контроллер может быть выполнен с возможностью выполнения процедуры управления, такой как примерные процедуры по фиг. 2-3, чтобы определять функцию коэффициента передачи на основании условий работы транспортного средства, таких как уклон дороги транспортного средства, присутствие встречного ветра или попутного ветра, а также нагрузки, перевозимой или буксируемой транспортным средством. Примерные регулирования функции коэффициента передачи описаны в материалах настоящей заявки со ссылкой на графики по фиг. 4A-B и 5A-B. В некоторых вариантах осуществления контроллер может применять алгоритм компенсации уклона (фиг. 7), так чтобы, по мере того как меняется возвышение, положение педали водителя могло поддерживаться как можно ближе к номинальному положению педали (фиг. 6). Примерная компенсация положения педали показана в примере по фиг. 7. Посредством изменения крутящего момента двигателя, который выдается при данной величине нажатия педали, на основании возвышения дороги, присутствия встречного ветра или попутного ветра и присутствия нагрузки транспортного средства, величина дополнительных усилий и внимания, требуемых от водителя транспортного средства, чтобы поддерживать заданный уровень рабочих характеристик транспортного средства, может снижаться для улучшения впечатления водителя от них.
На фиг. 1 показана принципиальная схема одного цилиндра многоцилиндрового двигателя 10 внутреннего сгорания. Камера или цилиндр 30 сгорания двигателя 10 показаны включающими в себя стенки 32 камеры сгорания и поршень 36, расположенный в них и присоединенный к коленчатому валу 40. Стартерный электродвигатель (не показан) может быть присоединен к коленчатому валу 40 через маховик (не показан). Цилиндр 30 может сообщаться с впускным окном 44 и выпускным окном 48 через соответственный впускной клапан 52 и выпускной клапан 54. Впускной клапан 52 и выпускной клапан 54 могут приводиться в действие посредством распределительного вала 51 впускных клапанов и распределительного вала 52 выпускных клапанов. Кроме того, положение распределительного вала 51 впускных клапанов и распределительного вала 52 выпускных клапанов может контролироваться датчиком 55 распределительного вала впускных клапанов и датчиком 57 распределительного вала выпускных клапанов, соответственно. Управление впускными и/или выпускными клапанами также может обеспечиваться сигналами, подаваемыми контроллером 12 через электромагнитные исполнительные механизмы клапанов (EVA). Дополнительно, впускные и выпускные клапаны могут управляться различными другими механическими системами управления, в том числе, посредством переключения профиля кулачков (CPS), регулируемой установки фаз кулачкового распределения (VCT), регулируемого подъема клапана (VVL) и/или регулируемой установки фаз клапанного распределения (VVT). В некоторых вариантах осуществления стратегия управления клапанами может включать в себя комбинацию двух или более из вышеупомянутых стратегий управления. Несмотря на то что цилиндр 30 показан имеющим только один впускной клапан и один выпускной клапан следует понимать, что, в некоторых вариантах осуществления, цилиндр 30 может иметь два или более впускных и/или выпускных клапанов.
В некоторых вариантах осуществления каждый цилиндр двигателя 10 может быть сконфигурирован одной или более топливных форсунок для подачи топлива в него. В качестве неограничивающего примера, показан цилиндр 30, включающий в себя одну топливную форсунку 66. Топливная форсунка 66 показана присоединенной к впускному окну 44 для подачи впрыскиваемого топлива пропорционально длительности импульса сигнала FPW, принятого из контроллера 12 через электронный формирователь 68. Таким образом, топливная форсунка 66 обеспечивает то, что известно в качестве оконного впрыска (в дальнейшем также упоминаемого как «PFI») топлива в цилиндр 30 сгорания. Следует понимать, что, в альтернативном варианте осуществления, форсунка 66 может быть форсункой непосредственного впрыска, впрыскивающей топливо непосредственно в цилиндр 30. Также следует понимать, что, несмотря на то, что изображенный вариант осуществления иллюстрирует двигатель, приводимый в действие посредством впрыска топлива через одиночную форсунку оконного впрыска; в альтернативных вариантах осуществления двигатель может приводиться в действие посредством использования двух форсунок (например, форсунки непосредственного впрыска и форсунки оконного впрыска) и регулированием относительной величины впрыска из каждой форсунки.
Топливо может доставляться к топливной форсунке 66 топливной системой (не показана), включающей в себя топливный бак, топливные насосы и направляющую-распределитель топлива. Двигатель 10 описан в материалах настоящей заявки со ссылкой на бензиновый двигатель внутреннего сгорания, однако, следует понимать, что, в некоторых вариантах осуществления, двигатель 10 может быть выполнен с возможностью использования разных видов топлива, в том числе бензина, дизельного топлива, спиртов и их комбинации.
Впускное окно 44 показано сообщающимся с впускным коллектором 42 через дроссельную заслонку 64. Кроме того, дроссельная заслонка 64 может быть присоединена к электрическому двигателю 64, из условия чтобы положение дроссельной заслонки 64 могло регулироваться контроллером 12 через электрический двигатель 62 (или исполнительный механизм). Такая конфигурация может упоминаться как электронное управление дросселем (ETC), которое также может использоваться во время регулирования числа оборотов холостого хода.
Система 88 зажигания без распределителя может выдавать искру зажигания в камеру 30 сгорания через свечу 92 зажигания в ответ на сигнал SA опережения зажигания из контроллера 12. Хотя показаны компоненты искрового зажигания, двигатель 10 (или часть его цилиндров) может не включать в себя компонентов искрового зажигания в некоторых вариантах осуществления и/или может приводиться в действие, не требуя искры.
Двигатель 10 может выдавать крутящий момент в систему трансмиссии (не показана) через коленчатый вал 40. Коленчатый вал 40 может быть присоединен к гидротрансформатору, который также присоединен к трансмиссии через вал турбины. Гидротрансформатор может включать в себя перепускную или блокировочную муфту. Блокировочная муфта, например, может приводиться в действие электрически, гидравлически или электрогидравлически. Трансмиссия может содержать трансмиссию с электронным управлением с множеством выбираемых дискретных передаточных отношений. В качестве альтернативы, в некоторых вариантах осуществления система трансмиссии может быть сконфигурирована в качестве бесступенчатой трансмиссии (CVT) или механической трансмиссии.
Датчик 126 отработавших газов показан присоединенным к выпускному окну 48 выше по потоку от каталитического нейтрализатора 70 отработавших газов. Должно быть отмечено, что датчик 126 может соответствовать множеству различных других датчиков, и каталитический нейтрализатор 70 отработавших газов может соответствовать множеству различных устройств снижения токсичности выбросов, расположенных на выпуске, в зависимости от конфигурации выпуска. Датчик 126 может быть датчиком для выдачи показания топливовоздушного соотношения отработавших газов, таким как датчик кислорода отработавших газов (EGO), линейный датчик кислорода, UEGO, двухрежимный датчик кислорода, HEGO, либо датчик содержания HC или CO. Например, состояние более высокого напряжения сигнала EGO указывает, что отработавшие газы могут быть обогащенными по стехиометрии, а состояние более низкого напряжения сигнала EGO указывает, что отработавшие газы могут быть обедненными по стехиометрии. Кроме того, сигнал EGO может использоваться во время регулирования топливовоздушного соотношения, для того чтобы оценивать и подтверждать различные аспекты требуемого режима управления двигателем.
Как описано выше, на фиг. 1 показан только один примерный цилиндр многоцилиндрового двигателя, и каждый цилиндр имеет свой собственный набор впускных/выпускных клапанов, топливных форсунок, свечей зажигания и т.д. Более того, хотя описанный выше двигатель показан с конфигурацией оконного впрыска, следует понимать, что двигатель может быть выполнен с возможностью впрыска топлива непосредственно в цилиндры.
Контроллер 12 схематично показан на фиг. 1 в качестве микрокомпьютера, включающего в себя микропроцессорный блок 102 (ЦПУ, CPU), порты 104 ввода/вывода, электронный запоминающий носитель 106 (ПЗУ, ROM), оперативное запоминающее устройство 108 (ОЗУ, RAM), энергонезависимую память 110 (KAM) и шину данных. Постоянное запоминающее устройство 106 запоминающего носителя может быть запрограммировано машинно-читаемыми данными, представляющими команды, исполняемые процессором 102 для выполнения способов, описанных ниже, а также вариантов, которые предвосхищены, но специально не перечислены.
Контроллер 12 показан принимающим различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе, измерение вводимого массового расхода воздуха (MAF) с датчика 120 массового расхода воздуха, присоединенного к впускному коллектору 42; температуру охлаждающей жидкости двигателя (ECT) с датчика 112 температуры, присоединенного к патрубку 114 охлаждения; сигнал профильного считывания зажигания (PIP) с датчика 118 на эффекте Холла, присоединенного к коленчатому валу 40; и положение TP дросселя с датчика положения дросселя в электронном приводе 64; и сигнал абсолютного давления в коллекторе, MAP, с датчика 122. Показание положения педали (PP) может определяться датчиком 134 положения педали, который считывает угол педали 130 согласно входному сигналу 132 водителя. В одном из примеров педаль 130 может быть педалью акселератора. В еще одном примере педаль 130 может быть тормозной педалью. Сигнал RPM числа оборотов двигателя может формироваться контроллером 12 из сигнала PIP, и сигнал MAP давления в коллекторе с датчика давления в коллекторе дает показание разрежения или давления во впускном коллекторе. Уклон дороги, например, может определяться датчиком 90. В качестве еще одного примера, уклон дороги может определяться аналитически благодаря использованию другой информации, имеющейся в распоряжении у (или в) контроллера. В качестве альтернативы, уклон дороги или другие дорожные условия могут приниматься из глобальной системы определения местоположения (GPS), присоединенной к контроллеру транспортного средства. Например, уклон дороги может считываться из базы данных карт на основании определения положения, считанного с интернет-сервера или GPS. Кроме того еще, уклон дороги может логически выводиться на основании фактического крутящего момента/нагрузки двигателя или силовой передачи относительно крутящего момента номинальной дорожной нагрузки в заданных условиях работы.
Контроллер 12 может управлять количеством топлива, подаваемого топливной форсункой 66, так чтобы топливовоздушная смесь в цилиндре 30 могла выбираться, чтобы быть в стехиометрии, значении, обогащенном по стехиометрии, или значении, обедненном по стехиометрии. В некоторых вариантах осуществления контроллер 12 может регулировать количество паров топлива, продуваемых во впускное окно через клапана продувки паров топлива (не показан), с возможностью сообщения присоединенный к нему. Кроме того, в некоторых вариантах осуществления двигатель 10 может включать в себя систему рециркуляции отработавших газов (EGR), которая направляет требуемую часть отработавших газов из выпускного окна 48 во впускное окно 44 через клапан EGR (не показан). В качестве альтернативы, часть отработавших газов может удерживаться в камерах сгорания посредством управления установки фаз распределения выпускных клапанов.
На основании различных принимаемых входных сигналов, контроллер 12 может регулировать различные рабочие параметры двигателя. Например, контроллер 12 может регулировать установку момента зажигания свечей зажигания, длительность импульса топливной форсунки и положение дросселя посредством привода дросселя. Подобным образом, контроллер может регулировать выходной крутящий момент двигателя на основании показания требования водителя, а кроме того, на основании других условий работы двигателя. В качестве одного из примеров, контроллер 12 может отображать положение педали у педали акселератора в специфичное положение (или угол) дросселя, чтобы, тем самым, обеспечивать предопределенную зависимость между выходным крутящим моментом двигателя и величиной нажатия педали водителем. Отображение может сохраняться в памяти контроллера и может подвергаться доступу во время работы транспортного средства в ответ на приведение в действие педали.
Зависимость между положением педали и выходным крутящим моментом двигателя может меняться на основании режима работы транспортного средства. Например, во время условий с регулированием тягового усилия, зависимость между величиной нажатия педали водителя и выходным крутящим моментом двигателя может регулироваться, например, чтобы снижать пробуксовку колеса на основании возвышения колеи, коэффициента трения колеи, состояния шин транспортного средства и т.д. В еще одном примере, во время условий с автоматическим поддержанием крейсерской скорости движения, зависимость может регулироваться, чтобы давать возможность управления скоростью и/или ускорением.
Как конкретизировано в материалах настоящей заявки, во время условий без крейсерского движения и без пробуксовки, контроллер может регулировать зависимость на основании уклона или возвышения дороги, по которой движется транспортное средство. Например, контроллер может принимать отображение между величиной нажатия педали водителем и выходным крутящим моментом двигателя с использованием элемента коэффициента передачи, который основан на уклоне или возвышении дороги. В дополнительном варианте осуществления зависимость может регулироваться с элементом коэффициента передачи, который основан на присутствии встречного ветра или попутного ветра, скорости ветра, направления ветра относительно направления движения транспортного средства и т.д. Кроме того, другие условия, внешние по отношению к транспортному средству, которые могут оказывать влияние на выходной крутящий момент двигателя транспортного средства во время работы двигателя (например, число оборотов двигателя, условия окружающей среды по температуре, давлению, влажности и т.д.), могут снабжаться коэффициентами при вычислении коэффициента усиления. Отображение приведения в действие педали в мощность на выходе двигателя, в таком случае, может регулироваться коэффициентом передачи для улучшения рабочих характеристик транспортного средства, в то время как изменяются условия работы транспортного средства. В, кроме того, дополнительном варианте осуществления, зависимость может дополнительно регулироваться на основании присутствия нагрузки транспортного средства, перевозимой и/или буксируемой транспортным средством, такой как груз или полезная нагрузка. Например, зависимость может регулироваться элементом коэффициента передачи, который основан на нагрузке транспортного средства относительно номинальной нагрузки транспортного средства. Номинальная нагрузка транспортного средства, например, может включать в себя ненагруженное транспортное средства без прицепа. В материалах настоящей заявки регулирование, например, может включать в себя, по мере того, как нагрузка транспортного средства превышает номинальную нагрузку транспортного средства, увеличение мощности на выходе двигателя для заданной величины нажатия педали.
В качестве примера, контроллер может отображать величину поворота ступни водителя, требуемую для поддержания скорости транспортного средства в номинальных условиях (то есть, при уклоне дороги 0%, в отсутствии встречного ветра или попутного ветра и без прицепа или нагрузки транспортного средства, перевозимой или буксируемой). Одно из таких примерных отображений 60 показано на фиг. 6. Как изображено в материалах настоящей заявки, в номинальных условиях, по мере того, как возрастает требуемая скорость транспортного средства, требуемая величина поворота ступни водителя (или нажатия педали) пропорционально возрастает. Во время меняющихся условий уклона дороги, меняющегося встречного ветра/попутного ветра или меняющейся нагрузки, буксируемой/перевозимой транспортным средством, контроллер может применять надлежащую функцию коэффициента передачи, которая компенсирует меняющийся параметр и предоставляет скорости транспортного средства возможность поддерживаться водителем транспортного средства, сохраняя одно и то же (или одинаковое) положение педали, в то время как меняется параметр. Примерное регулирование конкретизировано в материалах настоящей заявки на фиг. 8.
Таким образом, система и компоненты по фиг. 1 дают возможность способа для управления двигателем транспортного средства, в котором зависимость между величиной нажатия педали водителем и выходным крутящим моментом двигателя регулируется на основании уклона движения транспортного средства. Зависимость может дополнительно регулироваться на основании присутствия встречного ветра и попутного ветра и/или присутствия нагрузки транспортного средства, перевозимой или буксируемой транспортным средством. Таким образом, педаль акселератора может поддерживаться как можно ближе к номинальному положению педали. Однако в некоторых вариантах осуществления уклон, нагрузка или ветер могут не компенсироваться полностью, поскольку водитель транспортного средства может иметь ожидания, что ему потребуется повышать или понижать педаль акселератора до некоторой степени, чтобы добиваться своих целевых функций вождения, к примеру, на больших уклонах, которые визуально более очевидны. Это снижает ощущение или восприятие водителя, что транспортное средство едет самостоятельно. Кроме того еще, различные другие примеры работы системы описаны в материалах настоящей заявки. В частности, дополнительные подробности процедур управления включены ниже, которые могут использоваться с различными конфигурациями двигателя, такими как описанные на фиг. 1. Как следует понимать рядовым специалистом в данной области техники, специфичные процедуры, описанные ниже в блок-схемах последовательности операций способа, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная и тому подобная. По существу, различные проиллюстрированные действия или функции могут выполняться в проиллюстрированной последовательности, параллельно или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления изобретения, описанных в материалах настоящей заявки, но приведен для облегчения иллюстрации и описания. Хотя не проиллюстрировано явным образом, специалисту в данной области техники следует понимать, что одни или более из проиллюстрированных действий или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, эти чертежи могут графически представлять управляющую программу, которая должна быть запрограммирована на машинно-читаемый запоминающий носитель в контроллере 12.
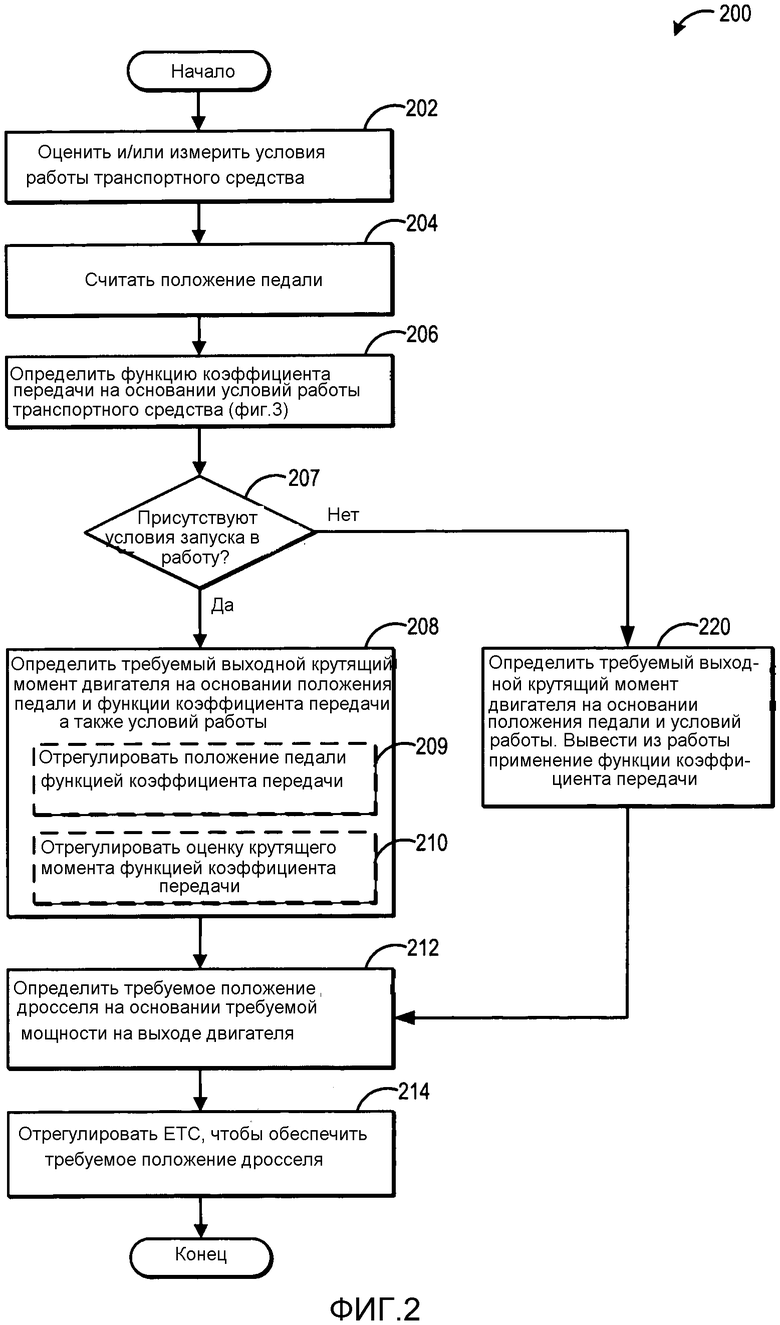
На фиг. 2-3 показаны примерные способы для управления работой двигателя в ответ на приведение в действие педали водителем во время изменения маршрутных условий транспортного средства. Таковые, например, могут включать в себя изменяющийся уклон колеи и/или изменяющийся курсовой встречный ветер/попутный ветер.
Далее, со ссылкой на фиг. 2, описана процедура для регулирования мощности на выходе двигателя/транспортного средства посредством регулируемой зависимости с приведением в действие педали. На 202, условия работы двигателя могут оцениваться и/или измеряться. Таковые, например, могут включать в себя условия окружающей среды (температуру, давление, влажность и т.д.), уклон или возвышение дороги, другие курсовые условия (например, коэффициент трения колеи), присутствие встречного ветра или попутного ветра и их частности (например, скорость, курс или направление) и т.д. Таковые также могут включать в себя различные условия работы двигателя, например, такие как положение педали, число оборотов двигателя, скорость транспортного средства, температуру двигателя, температуру каталитического нейтрализатора, уровень наддува и т.д.
На 204 может считываться текущее положение педали, в то время как приводится в действие водителем транспортного средства. Например, процедура может считывать текущее положения педали (PP) при нажатии с датчика 134 по фиг. 1. Входная фильтрация, фильтрация шумов и/или другая обработка сигнала также может использоваться для обработки показания нажатия педали. В одном из примеров положение педали может определяться относительно положений закрытой педали и широко открытой педали в качестве опорного значения.
На 206 функция коэффициента передачи педали может определяться на основании оцененных условий работы транспортного средства. Определенная функция коэффициента передачи может отражать определенную зависимость между нажатием педали и требуемой мощностью на выходе двигателя и/или транспортного средства, которая может включать в себя требуемый крутящий момент, ускорение, скорость транспортного средства, число оборотов двигателя или их комбинацию. Дополнительные подробности определения, выбора и/или регулирования зависимости на основании уклона транспортного средства и присутствия встречного ветра или попутного ветра описаны со ссылкой на фиг. 3. Например, регулирования конкретизированы со ссылкой на фиг. 4A-B и 5A-B.
На 207 может определяться, присутствуют ли условия запуска в работу коэффициента передачи. По существу, таковые могут быть условиями, которые используются для определения, должна или нет применяться функция коэффициента передачи, определенная на 206, а кроме того, должна ли функция коэффициента передачи применяться в конкретный момент времени.
Условия запуска в работу могут быть основаны на существующих условиях работы двигателя, таких как текущая скорость транспортного средства, управляемая водителем установка выключателя конфигурации режима рабочих характеристик или рабочее состояние транспортного средства, такое как регулирование тягового усилия. Если условия запуска в работу функции коэффициента передачи отсутствуют, то есть, если применение функции коэффициента передачи заблокировано, затем, на 220, входной сигнал педали водителя может пропускаться, немодифицированным, прямо в контроллер, и требуемая мощность на выходе двигателя может определяться на основании положения педали по 204, а не на основании определенной функции коэффициента усиления. После этого, процедура продолжается до 212, чтобы регулировать положение дросселя соответствующим образом.
В сравнении, если присутствуют условия запуска в работу, применение функции коэффициента передачи разрешается. Более конкретно, на 208, процедура определяет требуемый выходной крутящий момент двигателя на основании положения педали по 204 и определенной функции коэффициента передачи по 206. Кроме того, различные другие рабочие параметры могут использоваться для определения требуемого крутящего момента двигателя, например такие как число оборотов двигателя, скорость транспортного средства, режим работы транспортного средства, барометрическое давление, температура окружающей среды, передаточное отношение и/или другие параметры. В одном из примеров определение требуемой мощности на выходе двигателя на основании положения педали и определенной функции коэффициента передачи может включать в себя, на 209, регулирование положения педали с функцией коэффициента передачи, а затем использование отрегулированного положения педали для определения требуемого выходного крутящего момента. Например, может применяться элемент регулирования положения педали. В еще одном примере определение требуемой мощности на выходе двигателя на основании положения педали и определенной функции коэффициента передачи может включать в себя, на 210, регулирование первоначальной оценки крутящего момента с функцией коэффициента передачи и использование отрегулированной оценки крутящего момента для определения требуемого выходного крутящего момента. Например, может применяться элемент компенсации крутящего момента.
В некоторых вариантах осуществления контроллер может определять базовый требуемый водителем выходной крутящий момент двигателя и уровень рабочих характеристик транспортного средства, главным образом, на основании сигнала педали акселератора и числа оборотов двигателя (например, отображения по фиг. 6, которое основано на номинальных условиях уклона дороги и нагрузки). Затем базовое требование крутящего момента может адаптироваться с использованием функции коэффициента передачи, которая основана на условиях работы транспортного средства (например, возвышении дороги, уклоне колеи и т.д.), чтобы дополнять базовый требуемый водителем крутящий момент, с тем чтобы поддерживать определенный уровень рабочих характеристик транспортного средства, в то время как изменяется уклон дороги. Например, базовое требование крутящего момента может дополняться, чтобы компенсировать существующий уклон дороги, ветровую нагрузку или другие режимы нагрузки транспортного средства (например, буксировку прицепа или груз в кузове пикапа). Примерная компенсация конкретизирована в материалах настоящей заявки со ссылкой на отображения по фиг. 6 и 8.
Затем, на 212, процедура определяет требуемое положение дросселя на основании требуемого выходного крутящего момента двигателя. Например, процедура может обращаться к отображению, хранимому в контроллере, которое отображает требуемый крутящий момент в требуемое положение дросселя. В некоторых вариантах осуществления требуемое положение дросселя дополнительно может быть основано на условиях работы двигателя, таких как число оборотов двигателя и температура охлаждающей жидкости двигателя. На 218 процедура регулирует электронный дроссель, чтобы добиваться требуемого положения дросселя. То есть контроллер регулирует выходной крутящий момент двигателя, регулируя положение дросселя у дроссельной заслонки с электронным управлением. В альтернативном варианте осуществления процедура может идентифицировать требуемое положение дросселя прямо в ответ на положение педали по 204 и функцию коэффициента передачи по 206 (если функция коэффициента передачи запущена в работу). В любом случае, процедура электронным образом управляет положением дросселя в ответ на приведение в действие педали водителем, чтобы выдавать требуемую амплитудно-частотную характеристику посредством функции коэффициента передачи/преобразования, определенной на 206, когда функция коэффициента передачи запущена в работу.
Несмотря на то что дроссель используется в этом примере для регулирования выходного крутящего момента двигателя, следует понимать, что могут использоваться различные другие исполнительные механизмы двигателя. Например, альтернативное или дополнительное приведение в действие может использоваться для регулирования крутящего момента двигателя. Таковые, например, могут включать в себя такты клапанов, подъем клапана, наддув, установку фаз клапанного распределения, установку фаз кулачкового распределения, массу топлива и топливовоздушное соотношение, установку момента зажигания, установку момента впрыска или их комбинацию.
Таким образом, дроссель двигателя может регулироваться в ответ на команду оператора с учетом текущих и различных условий работы, используя выбранное отображение по 206. Как конкретизировано со ссылкой на фиг. 3, во время выбранных условий и/или режимов работы транспортного средства, чувствительность крутящего момента двигателя в ответ на нажатие детали может регулироваться, чтобы давать водителю возможность управлять выходной крутящий момент двигателя или транспортного средства во время движения по дороге меняющегося возвышения с по существу одной и той же величиной поворота ступни по сравнению с управлением транспортным средством по ровной дороге. Различные другие подходы также могут использоваться для регулирования мощности на выходе двигателя и/или углового положения дросселя двигателя.
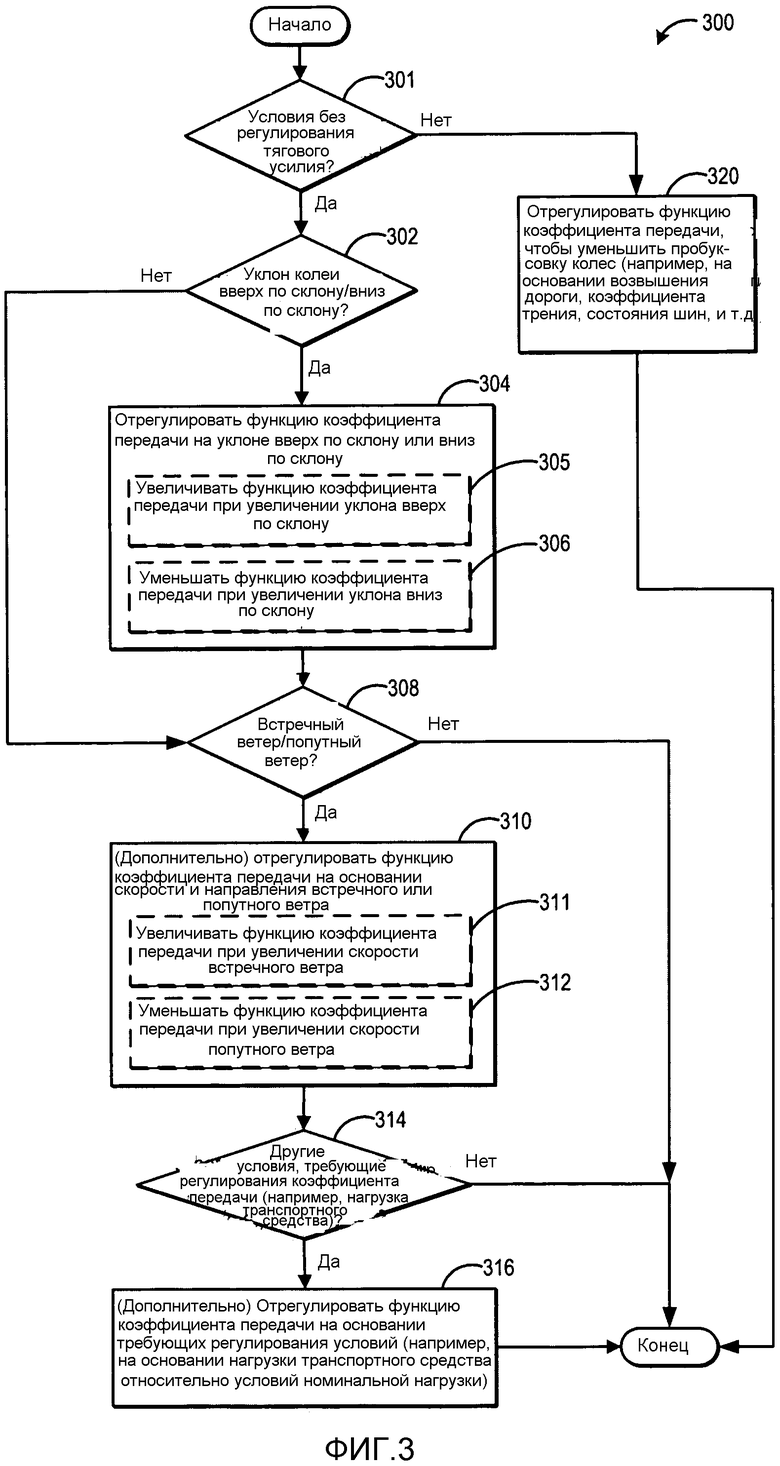
Далее, обращаясь к фиг. 3, описана процедура 300 для регулирования коэффициента передачи между величиной нажатия педали водителем и выходным крутящим моментом двигателя на основании уклона движения транспортного средства, а также присутствия встречного ветра или попутного ветра. Такая операция может использоваться, чтобы дать возможность более высокого коэффициента передачи при вождении транспортного средства на участке вверх по склону и/или в присутствии встречного ветра, наряду с предоставлением возможности более низкого коэффициента передачи при вождении на участке вниз по склону и/или в присутствии попутного ветра, с тем чтобы обеспечивать улучшенное восприятие водителем рабочих характеристик транспортного средства.
На 301 процедура включает в себя подтверждение, что присутствуют условия без регулирования тягового усилия. Например, может подтверждаться, что транспортное средство не находится в режиме работы транспортного средства с регулированием тягового усилия. По существу, условия без регулирования тягового усилия могут включать в себя одно или более из не во время управления пробуксовкой транспортного средства, не во время управления скоростью транспортного средства и не во время управления тяговым усилием транспортного средства. Если присутствуют условия с регулированием тягового усилия, то, на 320, процедура включает в себя регулирование функции коэффициента передачи между величиной нажатия педали водителем и выходным крутящим моментом двигателя для снижения пробуксовки транспортного средства. Например, функция коэффициента передачи может регулироваться на основании возвышения дороги, коэффициент трения колеи, состояния шин транспортного средства и т.д. По существу, этот дает в результате действие по снижению крутящего момента, как подходит для достижения надлежащего управления транспортным средством. В некоторых вариантах осуществления элемент компенсации или адаптации, требуемый для достижения управления пробуксовкой транспортного средства (или управления тяговым усилием), может рассчитываться заблаговременно и сохраняться в памяти контроллера для быстрого доступа. Это предоставляет элементу адаптации или функции коэффициента передачи управления тяговым усилием возможность быть в распоряжении, чтобы применяться, как надлежит, всякий раз, когда водитель применяет педаль акселератора. Дополнительно, если присутствуют условия автоматического поддержания крейсерской скорости движения, функция коэффициента передачи может регулироваться, чтобы обеспечивать управление скоростью и/или ускорением транспортного средства. Например, основанная на автоматическом поддержании крейсерской скорости движения функция коэффициента передачи может рассчитываться заблаговременно и сохраняться в памяти контроллера для быстрого доступа, так чтобы функция коэффициента передачи автоматического поддержания крейсерской скорости движения имелась в распоряжении, чтобы применяться, как надлежит, всякий раз, когда водитель применяет педаль акселератора.
Возвращаясь к 301, если условия без регулирования тягового усилия подтверждены, то, на 302, процедура включает в себя определение уклона движения транспортного средства и подтверждение, что есть уклон колеи вверх по склону или вниз по склону. Например, может подтверждаться, что уклон колеи вверх по склону или вниз по склону является большим, чем пороговое значение. По подтверждению уклона колеи вверх по склону или вниз по склону, на 304, процедура включает в себя регулирование зависимости (например, функции коэффициента передачи) между величиной нажатия педали акселератора водителем и выходным крутящим моментом двигателя на основании определенного уклона движения транспортного средства. То есть зависимость между положением педали водителя и выходным крутящим моментом двигателя может регулироваться на основании уклона транспортного средства только во время состояний транспортного средства без пробуксовки и без крейсерского движения. Регулирование, например, может включать в себя, как показано на 305, изменение зависимости, чтобы имела больший коэффициент передачи между величиной нажатия педали водителем и выходным крутящим моментом двигателя во время движения вверх по склону. В материалах настоящей заявки коэффициент передачи может увеличиваться по мере того, как возрастает уклон вверх по склону, так чтобы выдаваемый крутящий момент был пропорциональным уклону вверх по склону. В качестве еще одного примера, регулирование может включать в себя, как показано на 306, изменение зависимости, чтобы имела меньший коэффициент передачи между величиной нажатия педали водителем и выходным крутящим моментом двигателя во время движения вниз по склону. В материалах настоящей заявки коэффициент передачи может уменьшаться по мере того, как возрастает уклон вниз по склону, так чтобы выдаваемый крутящий момент был пропорциональным уклону вниз по склону.
Таким образом, выходной крутящий момент двигателя может увеличиваться с первой более низкой интенсивностью, когда педаль водителя нажимается на более низком возвышении, таком как на уровне моря или в равнинной местности. В сравнении, выходной крутящий момент двигателя может увеличиваться с второй более высокой интенсивностью, когда педаль водителя нажимается на более высоком возвышении, таком как на горе. По существу, это предоставляет водителю транспортного средства возможность поддерживать по существу одинаковый поворот ступни, чтобы добиваться требуемого уровня рабочих характеристик транспортного средства при управлении транспортным средством в равнинной местности, а также при движении по плоскости с верхним уклоном или плоскости с нижним уклоном. Примерные регулирования коэффициента передачи, выполняемые в ответ на присутствие уклонов вверх по склону или вниз по склону, описаны в материалах настоящей заявки со ссылкой на фиг. 4A-B. Как конкретизировано на них, функция коэффициента передачи может регулироваться, из условия чтобы зависимость между величиной нажатия педали водителем и мощностью на выходе двигателя была линейной, или регулируется иначе в выбранных областях. В качестве примера, зависимость может регулироваться в большей степени при более низких положениях педали (например, находящихся ближе к положению закрытой педали), чем при более высоких положениях педали (например, находящихся ближе к положению широко открытой педали). В качестве еще одного примера, зависимость может регулироваться в большей степени при более высоких положениях педали, чем при более низких положениях педали. Кроме того еще, зависимость может регулироваться в большей степени при средних положениях педали, чем при любом из более высокого положения педали или более низкого положения педали. Один из примеров алгоритма компенсации уклона, который может использоваться в процедуре по фиг. 3, проиллюстрирован на блок-схеме по фиг. 7 и описан ниже.
Если никакой колеи вверх по склону или вниз по склону не подтверждено на 302, или после регулирования коэффициента передачи на основании уклона колеи на 306, процедура переходит на 308, где определяется, присутствуют ли встречный ветер или попутный ветер. В качестве используемого в материалах настоящей заявки, встречный ветер указывает на составляющую ветра, которая противоположна направлению движения транспортного средства, следовательно, требуя повышенной нагрузки на силовую установку транспортного средства для поддержания постоянной скорости транспортного средства. Подобным образом, в качестве используемого в материалах настоящей заявки, попутный ветер указывает на составляющую ветра, которая совпадает с направлением движения транспортного средства, следовательно, требуя пониженной нагрузки на силовую установку транспортного средства для поддержания постоянной скорости транспортного средства. Если присутствует, процедура также может определять скорость, направление (или курс) и другие характеристики встречного ветра/попутного ветра, который может оказывать влияние на траекторию транспортного средства. По подтверждению, на 310, процедура включает в себя дополнительное регулирование зависимости между нажатием педали водителем и выходным крутящим моментом двигателя на основании присутствия встречного ветра или попутного ветра. Например, как показано на 311, регулирование может включать в себя увеличение выходного крутящего момента двигателя, вырабатываемого, когда педаль водителя нажимается, если присутствует встречный ветер. В качестве еще одного примера, как показано на 312, регулирование может включать в себя уменьшение выходного крутящего момента двигателя, вырабатываемого, когда педаль водителя нажимается, если присутствует попутный ветер. В материалах настоящей заявки, интенсивность увеличения может быть основана на скорости и направлении попутного ветра наряду с тем, что интенсивность уменьшения может быть основана на скорости и направлении попутного ветра. Например, функция коэффициента передачи может увеличиваться пропорционально встречному ветру, чтобы поддерживать скорость транспортного средства с относительно меньшим перемещением педали акселератора. Подобным образом, функция коэффициента передачи может уменьшаться пропорционально попутному ветру, чтобы поддерживать скорость транспортного средства с относительно меньшим перемещением педали акселератора. Величина увеличения или уменьшения коэффициента передачи (то есть, величина, на которую необходимо, чтобы была увеличена или уменьшена регулирование) для основанной на ветре нагрузки может зависеть от аэродинамической нагрузки на транспортное средство, создаваемой ветром. По существу, это может зависеть от характеристик, таких как скорость транспортного средства относительно ветра, коэффициент аэродинамического сопротивления транспортного средства, площадь лобовой поверхности транспортного средства и плотность воздуха. В некоторых вариантах осуществления по меньшей мере некоторые из этих элементов могут быть зависящими от транспортного средства и могут нуждаться в калибровке зависящим от транспортного средства образом (например, на основании марки и модели транспортного средства). По существу, посредством регулирования функции коэффициента передачи на основании ветровой нагрузки водитель транспортного средства может поддерживать по существу одинаковый поворот ступни, чтобы добиваться требуемого уровня рабочих характеристик транспортного средства при работе транспортного средства, когда нет ветра (то есть, во время номинальных условий ветровой нагрузки), а также когда присутствуют встречный ветер или попутный ветер. Примерные регулирования коэффициента передачи, выполняемые в ответ на присутствие встречного ветра или попутного ветра, описаны в материалах настоящей заявки со ссылкой на фиг. 5A-B.
Как конкретизировано на фиг. 5A-B, функция коэффициента передачи может регулироваться, из условия чтобы зависимость между величиной нажатия педали водителем и мощностью на выходе двигателя была линейной, или регулироваться иначе в выбранных областях. В качестве примера, зависимость может регулироваться в большей степени при более низких положениях педали (например, находящихся ближе к положению закрытой педали), чем при более высоких положениях педали (например, находящихся ближе к положению широко открытой педали). В качестве еще одного примера, зависимость может регулироваться в большей степени при более высоких положениях педали, чем при более низких положениях педали. Кроме того еще, зависимость может регулироваться в большей степени при средних положениях педали, чем при любом из более высокого положения педали или более низкого положения педали.
Затем, на 314, процедура определяет, присутствуют ли другие условия, требующие дополнительных регулировок коэффициента передачи. Если да, то, на 316, процедура дополнительно регулирует коэффициент передачи на основании дополнительных требующих регулирования условий подобным образом, как описано относительно уклона дороги и ветровой нагрузки. Эти условия могут включать в себя другие условия, которые оказывают влияние на нагрузку, прикладываемую к силовой установке транспортного средства, чтобы поддерживать постоянную скорость. В качестве примера, это может включать в себя нагрузку транспортного средства, перевозимую или буксируемую транспортным средством, относительно номинальной нагрузки. Например, нагрузка транспортного средства может включать в себя количество пассажиров в транспортном средстве, объем груза или полезной нагрузки, загруженных в и перевозимых транспортным средством, вес прицепа, буксируемого транспортным средством и т.д., в то время как номинальная нагрузка может не включать в себя никакого груза и полезной нагрузки, никакого буксируемого прицепа и никаких пассажиров. Регулирование может включать в себя увеличение мощности на выходе двигателя для данной величины нажатия педали по мере того, как нагрузка транспортного средства превышает номинальную нагрузку транспортного средства. То есть функция коэффициента передачи может увеличиваться по мере того, как нагрузка транспортного средства превышает номинальную нагрузку транспортного средства.
Как конкретизировано ранее на фиг. 2, регулирование коэффициента передачи может применяться посредством регулирования положения педали коэффициентом передачи, чтобы выдавать скорректированное положение педали, которое затем отображается в выходной крутящий момент двигателя, либо посредством использования положения педали для отображения выходного крутящего момента, а затем применения регулирования коэффициента передачи к выходному крутящему моменту двигателя. В дополнение, регулирование выходного крутящего момента двигателя может достигаться регулированием одного или более исполнительных механизмов крутящего момента двигателя, например, посредством регулирования положения дросселя дроссельной заслонки с электронным управлением.
В некоторых вариантах осуществления, в дополнение к регулированию функции коэффициента передачи, процедуры по фиг. 2-3 также могут переключать функцию коэффициента передачи/преобразования с соответствующими временными характеристиками и надлежащим образом, на основании условий работы транспортного средства. Например, на основании контролируемых условий работы транспортного средства может определяться, находятся ли условия в пределах выбранного окна для изменения функции коэффициента передачи/преобразования. В качестве примера, временные характеристики переключения могут меняться на основании того, находится ли положение педали на или ближе к закрытому (отпущенному) положению педали, или находится ли положение педали на или ближе к широко открытому (приложенному/нажатому) положению. В материалах настоящей заявки, посредством изменения временных характеристик переключения может быть дана возможность плавных переходов с одной функции коэффициента передачи на другую (например, с отключенной на включенную или с включенной на отключенную). В еще одном примере может определяться, достаточная ли модуляция педали выполняется водителем. В еще одном другом примере временные характеристики могут быть основаны на уклоне колеи или изменении уклона со временем. Например, временные характеристики могут быть ускоренными, в то время как интенсивность подъема плоскости с верхним уклоном возрастает. В качестве еще одного другого примера, временные характеристики могут меняться на основании скорости или ускорения транспортного средства. Кроме того еще, различные другие выбранные окна могут использоваться для изменения функции коэффициента передачи/преобразования. Регулирование временных характеристик функции коэффициента передачи может включать в себя регулирование определенной функции коэффициента передачи за предопределенную длительность или количество рабочих циклов двигателя. Например, фильтрация может использоваться для обеспечения более медленного изменения регулирования реакции дросселя в ответ на регулирование функции коэффициента передачи. Таким образом, коэффициент передачи педали может регулироваться выбранным образом во время выбранных условий, чтобы давать возможность улучшенных рабочих характеристик для водителя.
На фиг. 7 проиллюстрирована примерная структурная схема 700, изображающая алгоритм компенсации уклона, который может применяться в процедуре по фиг. 3, чтобы регулировать отображение положения педали. Следует понимать, что, несмотря на то, что структурная схема по фиг. 7 иллюстрирует компенсацию уклона на основании уклона дороги, это не подразумевается ограничивающим, и подобные компенсации могут производиться для ветровой нагрузки и нагрузки транспортного средства, испытываемых системой транспортного средства.
Алгоритм 702 компенсации уклона принимает входные сигналы с транспортного средства, в том числе, уклон дороги (который оценивается или логически выводится), требование водителя (например, на основании оцененных условий работы для водителя), а также входной сигнал с выключателя запуска в работу. В одном из примеров выключатель запуска в работу может включаться, если присутствуют условия запуска в работу функции коэффициента передачи. На основании принятых входных сигналов логика 704 переключения может определять, были ли удовлетворены условия входа или условия выхода для переключения на или из применения расчета компенсации уклона, и соответствующим образом следует ли включать или отключать регулирование компенсации коэффициента передачи. То есть определяется, следует или нет давать возможность расчета или применения функции коэффициента передачи и каким образом переключаться между этими состояниями. Выходной сигнал логики 704 переключения передается в расчет 706 компенсации уклона, который соответствующим образом вычисляет элемент компенсации или регулирование уклона (в материалах настоящей заявки также упоминаемый как основанная на уклоне функция коэффициента передачи), с использованием которого регулируется выходной крутящий момент двигателя. В качестве одного из примеров, на основании принятых входных сигналов, если определено, что условия «входа» удовлетворены, и должна быть задействована («включена») функция коэффициента передачи, функция коэффициента передачи компенсации уклона может определяться и применяться, и регулирование выходного крутящего момента двигателя может переключаться на с элементом компенсации уклона. В качестве еще одного примера, на основании принятых входных сигналов, если определено, что удовлетворены условия «выхода», и функция коэффициента передачи должна быть выведена из работы («отключена»), функция коэффициента передачи компенсации уклона может прекращать применение, и регулирование выходного крутящего момента двигателя может переключаться на без элемента компенсации уклона. Как конкретизировано выше, подобные алгоритмы и переключения могут быть вычислены и применяться для ветровых нагрузок и других нагрузок транспортного средства.
Таким образом, регулирования коэффициента передачи могут производиться между нажатием педали водителем и выходным крутящим моментом двигателя на основании условий работы транспортного средства. В одном из примеров, во время первого состояния без регулирования тягового усилия, контроллер может регулировать выходной крутящий момент двигателя в ответ на величину нажатия педали водителем на основании возвышения дороги. В материалах настоящей заявки, когда транспортное средство движется с первым более низким возвышением, контроллер может выдавать первый меньший выходной крутящий момент двигателя в ответ на величину нажатия педали водителем. Однако, когда транспортное средство движется на втором более высоком возвышении, контроллер может выдавать второй больший выходной крутящий момент двигателя в ответ на ту же самую величину нажатия педали водителем. Контроллер, кроме того, может регулировать выходной крутящий момент двигателя на основании встречного ветра или попутного ветра и соответствующей ветровой нагрузки, из условия чтобы, когда транспортное средство движется в присутствии встречного ветра, выходной крутящий момент двигателя в ответ на величину нажатия педали водителем увеличивался, но когда транспортное средство движется в присутствии попутного ветра, выходной крутящий момент двигателя в ответ на идентичную величину нажатия педали водителем уменьшался. Подобным образом, контроллер дополнительно может регулировать выходной крутящий момент двигателя, чтобы компенсировать другие нагрузки транспортного средства, такие как груз, полезная нагрузка, нагрузка прицепа и т.д.
В сравнении, во время второго состояния с регулированием тягового усилия, контроллер может регулировать выходной крутящий момент двигателя в ответ на (идентичную) величину нажатия педали водителем на основании пробуксовки колеса. В материалах настоящей заявки контроллер может регулировать выходной крутящий момент двигателя на основании возвышения колеи, коэффициента трения колеи, состояния транспортного средства и т.д.
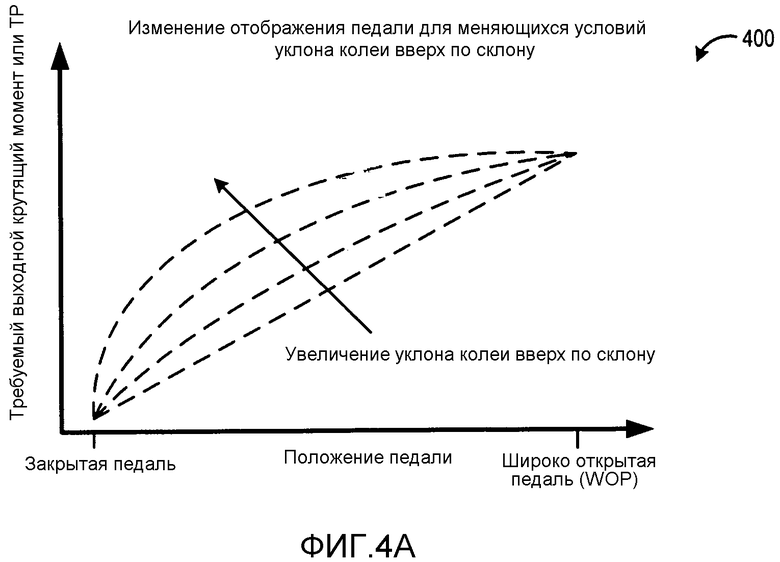
Примерные регулирования далее описаны со ссылкой на отображения по фиг. 4A-B и фиг. 5A-B. В частности, далее, со ссылкой на фиг. 4A, график 400 иллюстрирует изменение отображения педали для меняющегося состояния уклона колеи вверх по склону. Более конкретно, фиг. 4A показывает примерную функцию коэффициента передачи между положением педали (по мере того, как положение педали изменяется от закрытой педали до широко открытой педали, по оси x) и требуемым выходным крутящим моментом двигателя или положением дросселя (или компенсированным положением педали акселератора) (по оси y). В изображенном примере, по мере того, как уклон колеи вверх по склону возрастает (то есть, увеличивается возвышение дороги), более высокий коэффициент передачи снабжается зависимостью, отрегулированной в большей степени при более низких положениях педали (то есть, более близких к положению закрытой педали), чем при более высоких положениях педали (то есть, более близких к положению широко открытой педали). То есть в изображенном примере относительно более высокий коэффициент передачи или относительно большая крутизна предусмотрены при более низких положениях педали, чем при более высоких положениях педали. В материалах настоящей заявки, посредством изменения коэффициента передачи в заданной области, большее регулирование (например, отстройка) может быть предусмотрено при более низких положениях педали наряду с обеспечением более согласованной приемистости при более высоких положениях педали. Однако, в альтернативных вариантах осуществления, зависимость может регулироваться по-другому. Например, во время выбранных условий, зависимость может быть линейной по отношению к положению педали, или зависимость может регулироваться в большей степени при более высоких положениях педали. В, кроме того, еще одном примере, зависимость может регулироваться в большей степени при средних положениях педали (то есть, между положениями закрытой педали и широко открытой педали), чем при любом из более низкого или более высокого положений педали. Таким образом, по существу непрерывная зависимость между закрытой педалью и широко открытой педалью может поддерживаться наряду с прежним обеспечением регулируемого коэффициента передачи.
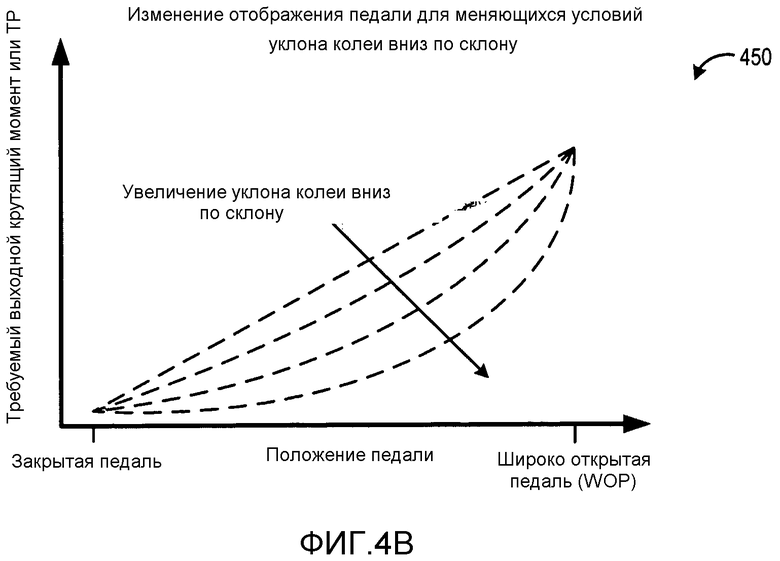
Далее, со ссылкой на фиг. 4B, график 450 иллюстрирует изменение отображения педали для меняющегося состояния уклона колеи вниз по склону. В изображенном примере по мере того, как уклон колеи вниз по склону увеличивается, более низкий коэффициент передачи снабжается зависимостью, отрегулированной в большей степени при более высоких положениях педали (то есть, находящихся ближе к широко открытому положению педали), чем при более низких положениях педали (то есть, находящихся ближе к закрытому положению педали). То есть в изображенном примере относительно более низкий коэффициент передачи предусмотрен при более высоких положениях педали, чем при более низких положениях педали. В материалах настоящей заявки, посредством изменения коэффициента передачи в заданной области, большее регулирование (например, отстройка) может быть предусмотрено при более высоких положениях педали наряду с обеспечением более согласованной приемистости при более низких положениях педали. Однако, в альтернативных вариантах осуществления, зависимость может регулироваться по-другому. Например, во время выбранных условий, зависимость может быть линейной по отношению к положению педали, или зависимость может регулироваться в большей степени при более низких положениях педали. В, кроме того, еще одном примере, зависимость может регулироваться в большей степени при средних положениях педали (то есть, между положениями закрытой педали и широко открытой педали), чем при любом из более низкого или более высокого положений педали. Далее, со ссылкой на фиг. 5A-B, графики 500 и 550 иллюстрируют изменения отображения педали для меняющихся условий встречного ветра (фиг. 5A) и меняющихся условий попутного ветра (фиг. 5B). Более конкретно, фиг. 5A показывает примерную функцию коэффициента передачи между положением педали (по мере того, как положение педали изменяется от закрытой педали до широко открытой педали, по оси x) и требуемым выходным крутящим моментом двигателя или положением дросселя (или компенсированным положением педали акселератора) (по оси y). На ней, по мере того как скорость встречного ветра возрастает, выдается более высокий коэффициент передачи с зависимостью, отрегулированной в большей степени при более низких положениях педали, чем при более высоких положениях педали. В сравнении, фиг. 5B показывает примерную функцию коэффициента передачи, в которой, по мере того как возрастает скорость попутного ветра, предусмотрен более низкий коэффициент передачи с зависимостью, отрегулированной в большей степени при более низких положениях педали, чем при более высоких положениях педали. Как с фиг. 4A-B, другие зависимости могут быть возможны, в том числе, но не в качестве ограничения, линейные зависимости, а также зависимости, которые регулируются в большей степени при средних положениях педали (то есть, между положениями закрытой педали и широко открытой педали), чем при любом из положений более низкой педали или более высокой педали.
В одном из примеров определенные функции коэффициента передачи могут применяться к номинальному отображению положения педали для формирования компенсированного отображения положения педали. Один из примеров номинального отображения положения педали показан на фиг. 6. На ней отображение 600 изображает номинальное отображение педали акселератора, которое установлено для номинальных условий транспортного средства, в том числе, движения транспортного средства по ровной плоской дороге (то есть, при уклоне дороги 0%) безветренным днем (то есть, при ветровой нагрузке 0%) с номинальной нагрузкой транспортного средства. Номинальная нагрузка транспортного средства может исключать условия буксировки прицепа или транспортного средства, тяжело нагруженного грузом. Дополнительно, номинальные условия могут включать в себя номинальные условия природной среды или окружающей среды по температуре, влажности и барометрическому давлению. Как показано в отображении 600, во время таких номинальных условий, величина поворота ступни водителя или нажатия педали, требуемая для поддержания требуемой скорости транспортного средства, может быть представлена линейной зависимостью. То есть, для поддержания заданной скорости транспортного средства, может определяться номинальное положение педали (или угол педали или нажатие педали). В отсутствие элемента компенсации, для поддержания одной и той же скорости транспортного средства в присутствии меняющегося уклона дороги, ветровой нагрузки или нагрузки транспортного средства водителю может требоваться приспосабливать поворот своей ступни. Более конкретно, в присутствии дороги вверх по склону, встречной ветровой нагрузки или нагрузки буксировкой/грузом, поворот ступни может требовать увеличения. По существу, это может приводить к утомлению водителя. Таким образом, чтобы дать водителю возможность поддерживать транспортное средство при меняющемся уклоне дороги, ветровой нагрузке или нагрузке транспортного средства, к тому же, наряду с одной и той же или одинаковой величиной поворота ступни, может применяться надлежащий элемент компенсации или функция коэффициента передачи.
Примерная основанная на уклоне компенсация изображена в отображении по фиг. 8. Более конкретно, отображение 800 изображает изменения скорости транспортного средства на 808, изменения уклона дороги на 806 и соответствующие изменения компенсированного уклоном входного сигнала положения педали на 802. Посредством регулирования основанного на уклоне элемента компенсации или функции коэффициента передачи, применяемой, чтобы добиваться компенсированного уклоном входного сигнала 802 положения педали, водитель может быть способным поддерживать угол 804 педали акселератора водителя (пунктирный график), даже в то время как изменяется уклон дороги, чтобы получать требуемую скорость транспортного средства. По существу, это снижает усилия водителя, требуемые для поддержания скорости транспортного средства, посредством снижения необходимости в частом изменении положения ступни водителя, тем самым уменьшая утомление водителя.
Таким образом, коэффициент передачи с педали в приемистость транспортного средства может меняться во время движения по дорогам меняющегося возвышения и в присутствии меняющихся ветровых нагрузок и нагрузок транспортного средства, чтобы снижать величину дополнительных усилий, требуемых от водителя для поддержания уровня рабочих характеристик транспортного средства. Посредством уменьшения величины поворота ступни и перерегулирования педали, требуемых от водителя транспортного средства, чтобы подниматься или спускаться по уклону, в присутствии ветра или при буксировке груза, утомление водителя может снижаться наряду с улучшением восприятия водителем рабочих характеристик транспортного средства. В целом, впечатление от вождения водителя может улучшаться.
Следует отметить, что примерные процедуры управления и оценки, включенные в материалы настоящей заявки, могут использоваться с различными конфигурациями систем двигателя и/или транспортного средства. Конкретные процедуры, описанные в материалах настоящей заявки, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, проиллюстрированные различные действия, операции или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящей заявки, но приведен для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, описанные действия могут графически представлять код, который должен быть запрограммирован на машинно-читаемый запоминающий носитель в системе управления двигателем.
Следует понимать, что конфигурации и процедуры, раскрытые в материалах настоящей заявки, являются примерными по природе, и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому, и другим типам двигателя. Предмет настоящего раскрытия включает в себя все новейшие и неочевидные комбинации и подкомбинации различных систем и конфигураций и другие признаки, функции и/или свойства, раскрытые в материалах настоящей заявки.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут указывать на элемент в единственном числе либо «первый» элемент или его эквивалент. Следует понимать, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в предмет настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОСТАНОВА ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2642012C2 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ЗАПУСКА ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ | 2013 |
|
RU2606160C2 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ЗАПУСКА ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ | 2013 |
|
RU2640162C2 |
| СПОСОБ ОСТАНОВА ВРАЩЕНИЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ОСТАНОВА ВРАЩЕНИЯ ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2643016C2 |
| СПОСОБ ОСТАНОВА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СИСТЕМА ОСТАНОВА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2588390C2 |
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧИ ТРАНСМИССИИ В ТРАНСПОРТНОМ СРЕДСТВЕ С ГИБРИДНЫМ ПРИВОДОМ И ТРАНСПОРТНОЕ СРЕДСТВО С ГИБРИДНЫМ ПРИВОДОМ | 2013 |
|
RU2640432C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИЛОВОГО АГРЕГАТА ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2569212C1 |
| СПОСОБ РАБОТЫ ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА (ВАРИАНТЫ) И ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2640433C2 |
| СПОСОБ РАБОТЫ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ (ВАРИАНТЫ) | 2014 |
|
RU2581993C2 |
| СИСТЕМА ДВИГАТЕЛЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2013 |
|
RU2653456C2 |

Предложены способ и системы для регулирования мощности на выходе двигателя, выдаваемой в ответ на приведение в действие педали водителем по меньшей мере на основании уклона движения транспортного средства. Во время движения вверх по склону, в присутствии встречного ветра и/или в присутствии полезной нагрузки транспортного средства мощность на выходе может увеличиваться наряду с тем, что во время движения вниз по склону или в присутствии попутного ветра мощность на выходе может уменьшаться. Достигается снижение утомления водителя во время движения по меняющимся возвышенностям, при меняющихся условиях окружающей среды и меняющихся нагрузках. 3 н. и 18 з.п. ф-лы, 8 ил.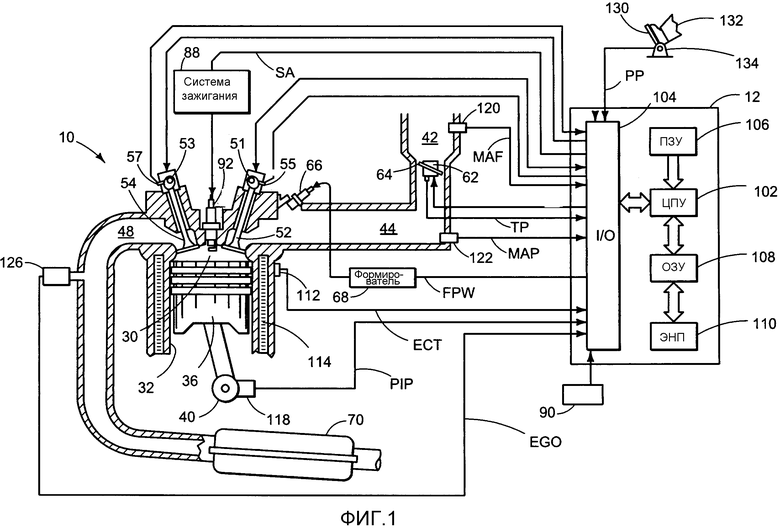
1. Способ управления двигателем транспортного средства, включающий:
определение уклона движения транспортного средства; и
регулирование зависимости между величиной нажатия педали акселератора водителем и выходным крутящим моментом двигателя на основании определяемого уклона движения транспортного средства при состояниях транспортного средства без пробуксовки и без крейсерского движения.
2. Способ по п. 1, дополнительно включающий регулирование выходного крутящего момента двигателя на основании отрегулированной зависимости, при этом регулирование включает изменение зависимости так, чтобы она имела больший коэффициент передачи между величиной нажатия педали акселератора водителем и выходным крутящим моментом двигателя во время движения вверх по склону и меньший коэффициент передачи между величиной нажатия педали водителем и выходным крутящим моментом двигателя во время движения вниз по склону.
3. Способ по п. 2, в котором коэффициент передачи увеличивается при увеличении уклона вверх по склону и уменьшается при увеличении уклона движения вниз по склону.
4. Способ по п. 1, в котором регулирование включает:
увеличение выходного крутящего момента двигателя с более низкой интенсивностью при нажатии педали водителем на более низком возвышении; и
увеличение выходного крутящего момента двигателя с более высокой интенсивностью при нажатии педали водителем на более высоком возвышении.
5. Способ по п. 4, в котором зависимость дополнительно регулируется на основании присутствия встречного ветра или попутного ветра.
6. Способ по п. 5, в котором дополнительное регулирование включает:
увеличение выходного крутящего момента двигателя при нажатии педали водителем, если присутствует встречный ветер; и
уменьшение выходного крутящего момента двигателя при нажатии педали водителем, если присутствует попутный ветер.
7. Способ по п. 6, в котором интенсивность увеличения основана на скорости и направлении встречного ветра, а интенсивность уменьшения основана на скорости и направлении попутного ветра.
8. Способ по п. 1, в котором зависимость регулируется с более высоким коэффициентом передачи при более низких положениях педали, чем при более высоких положениях педали.
9. Способ по п. 1, в котором зависимость регулируется в большей степени при средних положениях педали, чем при любых из более низких положений педали или более высоких положений педали.
10. Способ по п. 1, в котором выходной крутящий момент двигателя регулируется регулированием положения дроссельной заслонки с электронным управлением.
11. Способ по п. 1, в котором зависимость дополнительно регулируется на основании нагрузки транспортного средства относительно номинальной нагрузки транспортного средства, при этом нагрузка транспортного средства включает в себя нагрузку, перевозимую и/или буксируемую транспортным средством, а регулирование заключается в том, что при превышении нагрузкой транспортного средства номинальной нагрузки транспортного средства увеличивается мощность на выходе двигателя для данной величины нажатия педали.
12. Способ для двигателя транспортного средства, включающий:
определение возвышения дороги и/или пробуксовки колес;
регулирование выходного крутящего момента двигателя в ответ на величину нажатия педали водителем на основании определяемого возвышения дороги во время первого состояния без регулирования тягового усилия; и
регулирование выходного крутящего момента двигателя в ответ на величину нажатия педали водителем на основании определяемой пробуксовки колес во время второго состояния с регулированием тягового усилия.
13. Способ по п. 12, в котором первое состояние без регулирования тягового усилия включает в себя одно или более из: не во время управления скоростью транспортного средства, не во время управления пробуксовкой транспортного средства и не во время управления тяговым усилием транспортного средства.
14. Способ по п. 12, в котором регулирование во время первого состояния без регулирования тягового усилия заключается в том, что:
когда транспортное средство движется на первом, более низком возвышении, выдают первый, меньший выходной крутящий момент двигателя в ответ на величину нажатия педали водителем; а
когда транспортное средство движется на втором, более высоком возвышении, выдают второй, больший выходной крутящий момент двигателя в ответ на величину нажатия педали водителем.
15. Способ по п. 14, дополнительно включающий, во время первого состояния без регулирования тягового усилия, дополнительное регулирование выходного крутящего момента двигателя в ответ на величину нажатия педали водителем на основании встречного ветра или попутного ветра, при этом регулирование заключается в том, что, когда транспортное средство движется в присутствии встречного ветра, увеличивают выходной крутящий момент двигателя в ответ на величину нажатия педали водителем, а когда транспортное средство движется в присутствии попутного ветра, уменьшают выходной крутящий момент двигателя в ответ на величину нажатия педали водителем.
16. Способ по п. 12, в котором, во время второго состояния с регулированием тягового усилия, регулирование на основании пробуксовки колес заключается в том, что осуществляют регулирование на основании возвышения дороги, коэффициента трения колеи и состояния шин транспортного средства для снижения пробуксовки колес.
17. Система транспортного средства, содержащая:
педаль, выполненную с возможностью приема команды от водителя транспортного средства;
датчик, выполненный с возможностью выдачи выходного сигнала на основании нажатия педали водителем;
датчик, выполненный с возможностью выдачи показания уклона движения; и
систему управления с машинно-читаемыми командами для:
регулирования выходного крутящего момента двигателя в ответ на нажатие педали водителем на основании уклона движения при состоянии без пробуксовки.
18. Система по п. 17, в которой регулирование включает:
во время движения вверх по склону, увеличение коэффициента передачи между величиной нажатия педали водителем и выходным крутящим моментом двигателя, при этом коэффициент передачи увеличивается при увеличении уклона движения вверх по склону; и
во время движения вниз по склону, уменьшение коэффициента передачи между величиной нажатия педали водителем и выходным крутящим моментом двигателя, причем коэффициент передачи уменьшается при увеличении уклона движения вниз по склону.
19. Система по п. 18, в которой система управления выполнена с возможностью дополнительного регулирования выходного крутящего момента двигателя в ответ на встречный ветер или попутный ветер, присутствующий во время движения транспортного средства, при этом коэффициент передачи дополнительно увеличивается, если присутствует встречный ветер, и дополнительно уменьшается, если присутствует попутный ветер.
20. Система по п. 19, в которой система управления выполнена с возможностью дополнительного регулирования выходного крутящего момента двигателя в ответ на нагрузку транспортного средства, перевозимую или буксируемую транспортным средством, при этом коэффициент передачи дополнительно увеличивается при превышении нагрузкой транспортного средства номинальной нагрузки транспортного средства.
21. Система по п. 20, дополнительно содержащая дроссельную заслонку с электронным управлением, при этом система управления включает в себя команды для регулирования выходного крутящего момента двигателя посредством регулирования положения дроссельной заслонки с электронным управлением.
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |

