Область техники, к которой относится изобретение
Изобретение относится к способам улучшения эффективности работы автомобильного транспортного средства, которое может работать при широком диапазоне значений веса транспортного средства.
Уровень техники
Автомобильные транспортные средства, имеющие больший полный вес (ПВ), имеют специальную конструкцию, предназначенную для перевозки и буксировки массы, которая, как правило, не имеет отношение к пассажирским транспортным средствам. Данные транспортные средства могут быть использованы в таких сферах как: строительство, отдых и развлечения, коммерция. Даже если такие транспортные средства могут в некоторых случаях эксплуатироваться с весом, значительно меньшим, чем полный вес, они разработаны для обеспечения соответствующей работы педали газа как в нагруженном, так и в ненагруженном состояниях. Кроме того, может быть необходимо, чтобы транспортные средства соответствовали показателям производительности при полном весе таким образом, чтобы заказчик получал транспортное средство, исправно работающее при полном весе. Тем не менее, транспортное средство, работающее при полном весе, может проявлять эксплуатационные качества, значительно отличающиеся от эксплуатационных качеств транспортного средства, работающего только при собственном весе. Например, транспортное средство может развивать большую скорость при собственном весе, чем при полном весе. Кроме того, увеличенное ускорение транспортного средства может привести к затратам в связи с большим расходом топлива.
Раскрытие изобретения
Для преодоления вышеуказанных недостатков предлагается способ эксплуатации двигателя транспортного средства, в котором: обеспечивают наличие устройства ввода управляющего воздействия водителем для определения запрашиваемого водителем крутящего момента; и обеспечивают преобразование сигнала от этого устройства ввода в запрашиваемый водителем крутящий момент с использованием функции преобразования, основанной на эксплуатации транспортного средства при полном весе (снаряженной массе). При этом если вес транспортного средства меньше его полного веса, то функцию преобразования корректируют.
Путем корректировки функции преобразования, которая влияет на запрашиваемый водителем крутящий момент, когда вес транспортного средства меньше его полного веса, можно обеспечить более согласованную работу транспортного средства в широком диапазоне значений его веса. Кроме того, можно обеспечить меньший расход топлива при потребности водителя в высоком крутящем моменте во время работы транспортного средства при меньшем весе. Например, функция преобразования запроса водителя может быть основана на требуемой производительности и выбросах при работе транспортного средства при полном весе. Если транспортное средство работает при весе меньшем, чем его полный вес, то функция преобразования запроса водителя может быть скорректирована для обеспечения того же уровня показателей работы транспортного средства (например, ускорения) при его меньшем весе. Поддержание того же уровня показателей работы транспортного средства при его меньшем весе, как и при большем весе, может обеспечить более экономный расход топлива во время работы при малом весе. Кроме того, показатели работы транспортного средства могут иметь более устойчивый характер при широком диапазоне значений веса таким образом, что водитель может ожидать определенного уровня производительности вне зависимости от веса транспортного средства.
Предложенное изобретение может иметь несколько преимуществ. В частности, данный подход может обеспечить меньший расход топлива, если транспортное средство работает при меньшей нагрузке. Кроме того, данный подход может обеспечить более постоянный уровень производительности транспортные средства даже при наличии изменяющихся нагрузок. При этом предложенный способ может обеспечить уменьшение износа узлов трансмиссии, таких как муфты коробки передач, поскольку транспортное средство может работать при меньшем количестве переключений коробки передач.
Вышеуказанные и другие преимущества и отличительные признаки данного изобретения будут более ясно видны из нижеследующего подробного описания, которое может быть рассмотрено как отдельно, так и со ссылкой на сопроводительные чертежи.
Краткое описание чертежей
На Фиг.1 представлено схематическое изображение двигателя;
На Фиг.2 показано автомобильное транспортное средство, в котором используется двигатель;
На Фиг.3 представлена примерная последовательность работы автомобильного транспортного средства в соответствии со способом по изобретению;
На Фиг.4-8 показаны примерные способы эксплуатации и повышения производительности автомобильного транспортного средства.
Осуществление изобретения
На Фиг.1 приведен пример дизельного двигателя с наддувом, работу которого можно регулировать с помощью способа, представленного на Фиг.4-8, чтобы стабилизировать производительность транспортного средства при наличии меняющихся нагрузок. На Фиг.3 представляет собой пример смоделированной последовательности операций в транспортном средстве, при которой с помощью способа по изобретению уменьшают расход топлива при малых нагрузках транспортного средства и стабилизируют производительность транспортного средства между малой и большой нагрузками.
На Фиг.1 показан двигатель 10 внутреннего сгорания, содержащий несколько цилиндров, из которых на схеме показан только один, и который управляется с помощью электронного контроллера 12. Двигатель 10 содержит камеру 30 сгорания и стенки 32 цилиндра с поршнем 36, расположенным в них и соединенным с коленчатым валом 40. На Фиг.1 камера 30 сгорания соединена с впускным коллектором 44 и выпускным коллектором 48 с помощью соответствующих впускного клапана 52 и выпускного клапана 54. Управление впускным клапаном и выпускным клапаном может быть осуществлено с помощью впускного кулачка 51 и выпускного кулачка 53. Положение впускного кулачка 51 может быть определено с помощью датчика 55 впускного кулачка. Положение выпускного кулачка 53 может быть определено с помощью датчика 57 выпускного кулачка.
На Фиг.1 топливная форсунка 66 показана расположенной таким образом, чтобы осуществлять впрыск топлива непосредственно в камеру сгорания 30, что известно специалистам в данной области техники как прямой впрыск. Топливная форсунка 66 подает топливо пропорционально длительности импульса сигнала FPW, полученного от контроллера 12.
На Фиг.1 впускной коллектор 44 показан соединенным с дополнительным электронным дросселем 62, который регулирует положение дроссельной заслонки 64 для управления потоком воздуха из впускной нагнетательной камеры 46. Компрессор 162 всасывает воздух из воздухозаборного канала 42 для подачи его в нагнетательную камеру 46. Отработавшие газы вращают турбину 164, которая соединена с компрессором 162 посредством вала 161. В некоторых примерах в двигателе может быть предусмотрен охладитель наддувочного воздуха. Скорость компрессора может быть отрегулирована путем изменения положения управляющего устройства 72 поворотной лопатки или обводного клапана 158 компрессора. В других примерах перепускной клапан 74 может заменять управляющее устройство 72 поворотной лопатки или быть использован вместе с ним. Управляющее устройство 72 поворотной лопатки регулирует положение лопаток турбины с изменяемой геометрией. Если лопатки находятся в открытом положении, отработавшие газы могут проходить через турбину 164, подавая малое количество энергии для вращения турбины 164. Если лопатки находятся в закрытом положении, отработавшие газы могут проходить через турбину 164, сообщая турбине 164 увеличенную силу. В качестве варианта перепускной клапан 74 позволяет отработавшим газам проходить по турбине 164 таким образом, чтобы уменьшить количество энергии, подаваемой на турбину. Обводной клапан 158 компрессора обеспечивает возврат сжатого воздуха от выпуска компрессора 162 на впуск компрессора 162. Таким образом, эффективность компрессора 162 может быть уменьшена, чтобы повлиять на поток компрессора 162 и уменьшить вероятность помпажа компрессора.
Сгорание инициируется в камере 30 сгорания при воспламенении топлива, когда поршень 36 приближается к такту сжатия в верхней мертвой точке (ВМТ). В некоторых примерах универсальный датчик 126 концентрации кислорода в выхлопных газах (UEGO) может быть соединен с выпускным коллектором 48 выше по потоку относительно устройства 70 снижения токсичности выхлопных газов. В других примерах датчик UEGO может быть установлен ниже по потоку относительно одного или нескольких устройств для предварительной очистки выхлопных газов. Кроме того, в некоторых примерах датчик UEGO может быть заменен на датчик NOx, который имеет чувствительные элементы для определения содержания как NOx, так и кислорода.
При низких температурах двигателя запальная свеча 68 может преобразовывать электрическую энергию в тепловую, повышая, таким образом температуру в камере 30 сгорания. При повышении температуры в камере 30 сгорания воспламенение топливовоздушной смеси в цилиндре с помощью сжатия происходит легче.
В одном примере устройство 70 снижения токсичности выхлопных газов может включать в себя сажевый фильтр и каталитические блоки. В другом примере может быть использовано несколько устройств снижения токсичности выхлопных газов, каждое из которых имеет несколько блоков. В одном примере устройство 70 снижения токсичности выхлопных газов может включать в себя катализатор окисления. В других примерах устройство снижения токсичности выхлопных газов может включать в себя ловушку для обедненных NOx, или катализатор селективного восстановления (SCR), и/или дизельный сажевый фильтр (DPF).
В примерах выполнения, где двигатель 10 представляет собой бензиновый двигатель, элемент 66 может быть запальной свечой, а элемент 68 может быть топливной форсункой. Момент впрыска топлива и момент зажигания могут быть отрегулированы относительно положения коленчатого вала 40.
Контроллер 12 показан на Фиг.1 как традиционный микрокомпьютер, содержащий: микропроцессорный блок 102 (CPU), порты 104 ввода и вывода (I/O), постоянное запоминающее устройство 106 (ROM), оперативную память 108 (RAM), оперативную энергонезависимую память 110 (KAM) и обычную шину данных. Контроллер 12 показан получающим различные сигналы от датчиков, соединенных с двигателем 10. Помимо описанных выше сигналов, контроллер также получает следующие данные: о температуре охлаждающей жидкости двигателя (ЕСТ) от датчика 112 температуры, соединенного с каналом 114 охлаждения; от позиционного датчика 134, соединенного с педалью газа 130, для измерения силы нажатия ногой 132; измерения давления в коллекторе двигателя (MAP) от датчика давления 121, соединенного с впускным коллектором 44; данные о давлении наддува от датчика 122 давления, данные о концентрации кислорода в отработавших газах от датчика 126 кислорода; о фазе двигателя с датчика 118 на эффекте Холла, считывающего положение коленчатого вала 40; показания датчика 120 воздушной массы, поступающей в двигатель (например, термоанемометр); и показания положения дросселя от датчика 58. Также датчиком 135 давления может быть измерено внешнее барометрическое давление для обработки контроллером 12. В предпочтительном варианте позиционный датчик 118 производит заранее установленное количество равномерных импульсов в каждый цикл коленчатого вала, на основании которых может быть определена скорость вращения двигателя (RPM).
Во время работы каждый цилиндр в двигателе 10 обычно проходит четыре рабочих цикла: впуск, сжатие, рабочий ход и выпуск. Во время впуска обычно выпускной клапан 54 закрывается, а впускной клапан 52 открывается. Воздух поступает в камеру сгорания 30 через впускной коллектор 44, а поршень 36 двигается по направлению к дну цилиндра так, чтобы увеличить объем внутри камеры сгорания 30. Положение, в котором поршень 36 находится рядом с дном цилиндра и в конце своего хода (т.е. когда камера сгорания 30 имеет наибольший объем) обычно называется специалистами в данной области нижней мертвой точкой (НМТ). Во время хода сжатия впускной клапан 52 и выпускной клапан 54 закрыты. Поршень 36 двигается по направлению к головке цилиндров, чтобы сжать воздух внутри камеры сгорания 30. Точка, в которой поршень 36 находится в конце своего хода и наиболее близко к головке цилиндров (т.е. когда камера сгорания имеет наименьший объем) обычно называется специалистами в данной области верхней мертвой точкой (ВМТ). В процессе, здесь и далее обозначаемом «впрыскивание», топливо поступает в камеру сгорания. В некоторых примерах топливо может быть впрыснуто в цилиндр несколько раз за один цикл цилиндра. В процессе, здесь и далее обозначаемом «зажигание», впрыснутое топливо воспламеняют путем сжатия, что приводит к сгоранию. Альтернативно, сгорание может быть инициировано с помощью искры, полученной от свечи зажигания. Во время рабочего хода расширяющиеся газы толкают поршень 36 обратно к НМТ. Коленчатый вал 40 превращает движение поршня в крутящий момент вращающегося вала. Наконец, во время хода выпуска, выпускной клапан 54 открывается, чтобы выпустить воспламененную смесь воздуха и топлива в выпускной коллектор 48, а поршень возвращается к ВМТ. Можно отметить, что вышеизложенное приведено только в качестве примера, и распределение по времени открывания и/или закрывания впускного и выпускного клапанов может меняться так, чтобы обеспечить положительное или отрицательное перекрытие клапанов, позднее закрывание впускного клапана или различные другие варианты. Кроме того, в некоторых примерах осуществления изобретения двухтактный цикл может быть применен вместо четырехтактного цикла.
На Фиг.2 показано транспортное средство, в котором может использоваться двигатель 10. На Фиг.2 транспортное средство 202 соединено с прицепом 204. Транспортное средство 202 может иметь ограничитель 220 давления тормозной системы, датчик 224 высоты транспортного средства, акселерометр 226, датчик 228 деформации на сцепном устройстве прицепа. Полный вес транспортного средства может включать в себя вес прицепа 204, и может быть определен с помощью датчика 224 высоты, ограничителя 220 давления тормозной системы и/или акселерометра. В одном примере выходные данные датчика 224 высоты являются входными данными для функции преобразования, которая выдает вес транспортного средства в зависимости от выходных данных датчика 224 высоты. Вес прицепа 204 может быть определен с помощью датчика 228 деформации во время ускорения транспортного средства. Транспортное средство 202 может также включать в себя уклономер 290 для определения уклона дороги.
Таким образом, система, представленная на Фиг.1 и 2, относится к системе двигателя, включающей с себя: двигатель; турбонагнетатель, соединенный с двигателем; контроллер с записанными в постоянной памяти командами для корректировки переменной управляющего воздействия водителя и регулировки исполнительного механизма, когда показатель запуска транспортного средства превышает пороговое значение, основанное на полном весе транспортного средства. Система также предусматривает немедленный возврат параметра к исходному значению, когда показатель запуска транспортного средства не превышает первое пороговое значение. Система также предусматривает регулирование параметра до заранее заданного уровня, когда показатель запуска транспортного средства превышает второе пороговое значение. Если исполнительным механизмом является перепускной клапан турбонагнетателя, он понижает давление выхлопа, когда показатель запуска транспортного средства превышает пороговое значение. Если исполнительным механизмом является исполнительный механизм срабатывания клапана, он уменьшает ускорение транспортного средства до значения меньшего, чем ускорение, соответствующее показателю запуска транспортного средства.
На Фиг.3 показаны сигналы, представляющие интерес во время примерного периода времени, когда транспортное средство работает при своем полном весе, а затем при меньшем весе. Сигналы и последовательности, показанные на Фиг.3, могут быть сгенерированы системой, показанной на Фиг.1 и 2, при выполнении способа, представленного на Фиг.4-8. Кроме того, настраиваемые параметры и изменение массы транспортного средства показаны в качестве иллюстрации и не являются ограничивающими объем или охват описания. Вертикальные отметки Т0-Т7 относятся к моментам времени, представляющим особый интерес в данной последовательности.
На Фиг.3 первый график сверху представляет собой зависимость скорости транспортного средства от времени. По оси Х отложено время, значение которого возрастает в направлении слева направо. По оси Y отложена скорость транспортного средства, значение которой возрастает в направлении стрелки оси Y.
Второй график сверху на Фиг.3 представляет собой зависимость входного сигнала о запросе водителя (например, при использовании педали газа) от времени. По оси Y отложен входной сигнал о запросе водителя, значение которого возрастает в направлении стрелки оси Y. По оси Х отложено время, значение которого возрастает в направлении стрелки оси X.
Третий график сверху на Фиг.3 представляет собой зависимость крутящего момента двигателя при торможении от времени. По оси Y отложен крутящий момент двигателя при торможении, значение которого возрастает в направлении стрелки оси Y. По оси Х отложено время, значение которого возрастает в направлении стрелки оси X.
Четвертый график сверху на Фиг.3 представляет собой зависимость настроенного параметра, например, значения в функции преобразования, от времени. Значение настроенного параметра возрастает в направлении стрелки оси Y. По оси Х отложено время, значение которого возрастает в направлении слева направо.
Пятый график сверху на Фиг.3 представляет собой зависимость коэффициента полезного действия (КПД) двигателя от времени. По оси Y отложен КПД двигателя, значение которого возрастает в направлении стрелки оси Y. По оси Х отложено время, значение которого возрастает в направлении слева направо.
Шестой график сверху на фиг.3 представляет собой зависимость оцененной массы транспортного средства, возможно включая прицеп, от времени. По оси Y отложена оцененная масса транспортного средства, значение которой возрастает в направлении стрелки оси Y. По оси Х отложено время, значение которого возрастает в направлении слева направо.
Седьмой график сверху на Фиг.3 представляет собой зависимость фактической массы транспортные средства от времени. По оси Y отложена фактическая масса транспортного средства от времени, которая возрастает в направлении стрелки оси Y. По оси Х отложено время, значение которого возрастает в направлении слева направо.
В момент времени Т0 массой транспортного средства является его полный вес, и транспортное средство остановлено. Двигатель работает при низком уровне крутящего момента торможения, а входной сигнал о запросе водителя равен нулю. Настраиваемый параметр и КПД находятся на низких уровнях, что указывает на отсутствие корректировки настраиваемого параметра и КПД. Оцененная масса транспортного средства соответствует полному весу транспортного средства.
Между моментами времени Т0 и T1 входной сигнал о запросе водителя возрастает при увеличении управляющего воздействия водителя, и крутящий момент двигателя при торможении также возрастает. Транспортное средство ускоряется, реагируя на крутящий момент двигателя, а скорректированный параметр и КПД остаются неизменными, поскольку транспортное средство работает при полном весе.
В момент времени Т2 транспортное средство остановлено после того, как сигнал о запросе водителя снова стал равным нулю, реагируя на соответствующее управляющее воздействие водителя, после уменьшения крутящего момента двигателя. Настроенный параметр и КПД остаются неизменными. Оцененная масса транспортного средства и фактическая масса транспортного средства остаются на уровне полного веса.
В момент времени Т3 происходит изменение фактической массы транспортного средства. Фактическая масса транспортного средства может быть изменена в результате прикрепления/отцепления прицепа к транспортному средству, загрузки/выгрузки груза на транспортное средство и/или посадки/высадки пассажиров в или из транспортного средства. В данном примере фактическая масса транспортного средства уменьшается с уровня полного веса в результате выгрузки водителем груза. Фактическая масса транспортного средства в данном примере неизменна, пока транспортное средство не начнет движение. Тем не менее, в некоторых примерах оцененная масса транспортного средства может измениться при выгрузке груза или отцеплении прицепа. Например, оцененная масса транспортного средства может измениться при изменении высоты транспортного средства.
Между моментом времени Т3 и моментом времени Т4 входной сигнал о запросе водителя возрастает, реагируя на управляющее воздействие водителя. Крутящий момент двигателя возрастает в результате увеличения управляющего воздействия водителя, и транспортное средство начинает ускоряться со скоростью, превышающей значение в момент времени T1, даже если входной сигнал о запросе водителя был уменьшен. Ускорение транспортного средства происходит с большей скоростью из-за меньшей массы транспортного средства. Оцененная масса транспортного средства продолжает оставаться постоянной, и настроенный параметр и КПД также остаются неизменными.
В момент времени Т4 оцененная масса транспортного средства уменьшилась в результате увеличения ускорения транспортного средства. В результате уменьшения массы транспортного средства происходит уменьшение КПД и настроенного параметра.
Между моментом времени Т4 и моментом времени Т5 происходит дальнейшее уменьшение оцененной массы транспортного средства, и продолжается уточнение настроенного параметра и КПД. В данном примере масса транспортного средства уменьшилась в связи с оцененным значением массы транспортного средства, основанном на ускорении транспортного средства и оцененном крутящем моменте двигателя.
В момент времени Т5 оцененная масса транспортного средства достигает окончательной величины, а регулирование настроенного параметра и КПД завершает процесс корректировки и приходит к постоянному значению или статической функции. Ускорение транспортного средства меньше, чем ускорение в момент времени Т4, поскольку транспортное средство находится на более высокой передаче и поскольку скорректированный параметр регулирует воздействие входного сигнала о запросе водителя на крутящий момент двигателя. Фактическая масса транспортного средства продолжает оставаться постоянной, поскольку транспортное средство продолжает нести ту же нагрузку, что и в момент времени Т3.
В момент времени Т6 происходит остановка транспортного средства в результате входного сигнала о соответствующем запросе водителя, и уменьшения крутящего момента двигателя, имевшего место до момента времени Т6. Масса транспортного средства меньше его полного веса, и оцененная масса транспортного средства постоянна. КПД и настроенный параметр также продолжают оставаться неизменными.
В момент времени Т7 происходит изменение входного сигнала о запросе водителя, аналогичное изменению входного сигнала о запросе водителя в момент времени T1. Тем не менее, масса транспортного средства в момент времени Т7 меньше, чем масса транспортного средства в момент времени T1. Вместе с тем, ускорение транспортного средства происходит с той же скоростью, как и в момент времени T1, поскольку настроенный параметр приводит к уменьшению крутящего момента двигателя по сравнению с моментом времени T1. Кроме того, регулировка КПД приводит к уменьшению давления на выходе турбины таким образом, что всасывание двигателя может быть уменьшено, что приведет к меньшему расходу топлива. В другом варианте регулировка КПД может изменять такт впускного и/или выпускного клапана. Таким образом, настроенный параметр и КПД могут быть отрегулированы при уменьшении веса транспортного средства по сравнению с его полным весом.
На Фиг.4 представлен первый способ эксплуатации и улучшения показателей работы транспортного средства. Способ, представленный на Фиг.4, может обеспечивать выполнение последовательности операций, показанной на Фиг.3.
На этапе 402 способ 400 предусматривает определение наличия входного сигнала о запросе водителя. Входной сигнал о запросе водителя может быть получен от педали газа, рычага или другого устройства. В одном примере входной сигнал о запросе водителя преобразует движение ноги водителя в электрическое напряжение. После определения входного сигнала о запросе водителя способ 400 переходит к этапу 404.
На этапе 404 к входному сигналу о запросе водителя применяют регулирующую корректировку. В данном примере регулирующая корректировка запроса водителя является условием, которое изменяется вместе с массой транспортного средства. Регулируемый запрос водителя добавляется к входному сигналу о запросе водителя для корректировки функционирования двигателя. В одном примере регулируемый запрос водителя имеет нулевое значение, если масса транспортного средства равна полному весу транспортного средства. При уменьшении массы транспортного средства регулируемый запрос водителя может быть увеличен или уменьшен в зависимости от конкретной ситуации. В одном примере регулируемый запрос водителя уменьшают, если масса транспортного средства уменьшается таким образом, что значение входного сигнала о запросе водителя уменьшается. Также для запроса водителя может быть применен нулевой нижний предел. Например, если входной сигнал о запросе водителя равен 2,5 вольт при определенном положении педали газа, а корректировка регулируемого запроса водителя равна 0,05 вольт, то скорректированный входной сигнал о запросе водителя равен 2,45 вольт. После применения корректировки регулируемого запроса водителя способ 400 переходит к этапу 406.
На этапе 406 определяют режим работы транспортного средства. Рабочие режимы двигателя могут включать в себя, без ограничения перечисленным, скорость вращения двигателя, скорость транспортного средства, нагрузку двигателя, передачу трансмиссии и температуру двигателя. После того как были определены рабочие режимы транспортного средства, способ 400 переходит к этапу 408.
На этапе 408 способ 400 предусматривает определение запрашиваемого водителем крутящего момента. В одном примере запрашиваемый водителем крутящий момент определяют с помощью индексирования функции преобразования, которая сохранена в памяти с использованием скорректированного входного сигнала о запросе водителя (например, входной сигнал о запросе водителя плюс корректировка регулируемого запроса водителя). Функция преобразования выдает крутящий момент двигателя при торможении, требуемый крутящий момент на колесах, крутящий момент крыльчатки преобразователя крутящего момента или крутящий момент другой передачи. Результат вычисления функции преобразования может быть далее скорректирован в зависимости от режимов работы транспортного средства. Например, запрашиваемый водителем крутящий момент может быть уменьшен при более низких температурах двигателя. После того как был определен запрашиваемый водителем крутящий момент, способ 400 переходит к этапу 410.
На этапе 410 способ 400 предусматривает определение рабочих условий окружающей среды. Условия окружающей среды могут включать в себя, без ограничения перечисленным, барометрическое давление, уклон дороги и температуру окружающего воздуха. После того как были определены условия окружающей среды, способ 400 переходит на этап 411.
На этапе 411 способ 400 предусматривает определение показателей запуска транспортного средства. В одном примере показатели запуска транспортного средства сохранены в таблице или функции, из которой могут быть взяты полученные опытным путем значения степени ускорения транспортного средства, связанные с его весом, значения барометрического давления, текущей передачи трансмиссии и запрашиваемого водителем крутящего момента. Способ 400 переходит по таблице или функции, получая в результате новые значения по мере изменения запрашиваемого водителем крутящего момента и других параметров. Кроме того, в одном примере показатели запуска транспортного средства основаны на его функционировании с полным весом и с желаемой скоростью ускорения при требуемом уровне выходного сигнала о выхлопах двигателя. После того как были определены показатели запуска транспортного средства, способ 400 переходит к этапу 412.
На этапе 412 способ 400 предусматривает определение фактических показателей запуска транспортного средства. В одном примере ускорение транспортного средства от неподвижного состояния до пороговой скорости может быть определено датчиком скорости транспортного средства. Например, скорость ускорения транспортного средства может быть измерена в заранее заданные моменты времени или через заранее заданные расстояния, пройденные после отпускания педали тормоза и начала движения транспортного средства. После того как были определены фактические показатели запуска транспортного средства, способ 400 переходит к этапу 414.
На этапе 414 способ 400 предусматривает оценку, является ли абсолютное значение требуемого показателя запуска транспортного средства за вычетом фактического показателя запуска, меньше порогового значения. Например, способ 400 может определять фактическую степень ускорения Х км/с2 и требуемое ускорение Y км/с2. Если разница не превышает пороговое значение степени ускорения, то ответ «ДА», и способ 400 завершается. В противном случае ответ «НЕТ», и способ 400 переходит к этапу 416.
На этапе 416 оценивают, превышает ли требуемый показатель запуска фактический показатель запуска. Если это так, то ответ «ДА», и способ 400 переходит к этапу 430. В противном случае получают ответ «НЕТ», и способ 400 переходит к этапу 418. В некоторых примерах могут быть применены два пороговых значения вместо одного требуемого показателя запуска. Например, если фактический показатель запуска превышает первое пороговое значение, то способ 400 переходит к этапу 430. С другой стороны, если фактический показатель запуска не превышает второе пороговое значение, то способ 400 переходит к этапу 418. Кроме того, регулируемый запрос водителя может быть возвращен к заранее заданному значению, например 0 или 1, если показатель запуска не превышает второе пороговое значение.
На этапе 418 способ 400 предусматривает определение корректировки регулируемого запроса водителя с превышением производительности. Корректировка регулируемого запроса водителя при превышении производительности может уменьшить крутящий момент двигателя при торможении для установленного управляющего воздействия водителя таким образом, что не происходит ускорения транспортного средства со скоростью, превышающей скорость ускорения транспортного средства при аналогичных условиях, когда вес транспортного средства равен полному весу. В одном примере регулируемый запрос водителя при чрезмерной производительности может быть взят из таблицы или функции корректировок регулируемого запроса водителя при чрезмерной производительности, содержащей значения, определенные опытным путем. В других примерах корректировка регулируемого запроса водителя при чрезмерной производительности может быть основана на разнице между требуемым показателем запуска и фактическим показателем запуска, умноженным на заранее заданный коэффициент. После определения корректировки регулируемого запроса водителя при чрезмерной производительности способ 400 переходит к этапу 420.
На этапе 420 оценивают, находится ли корректировка регулируемого запроса водителя при чрезмерной производительности в заранее заданных вычисленных пределах. Например, может быть оценено, что корректировка регулируемого запроса водителя при чрезмерной производительности находится в требуемом диапазоне значений. Если в способе 400 определено, что корректировка запроса водителя при чрезмерной производительности находится в вычисленных пределах, то ответ «ДА», и способ 400 переходит к этапу 422. В противном случае способ 400 завершается, и обновления корректировки регулируемого запроса водителя не происходит.
На этапе 422 способ 400 предусматривает обновление корректировки регулируемого запроса водителя путем уменьшения корректировки, использованной на этапе 404. В частности, значение корректировки, примененное на этапе 404, уменьшено на величину корректировки при чрезмерной производительности, определенную на этапе 418. Таким образом, корректировка регулируемого запроса водителя может быть выполнена с учетом режимов, в которых транспортное средство не работает при полном весе. Основывая показатели запуска транспортного средства на работе при полном весе, можно обеспечить более стабильную производительность транспортного средства, когда оно работает в широком диапазоне значений веса. В некоторых примерах корректировка может происходить во время ускорения транспортного средства, однако применение скорректированных значений может быть отложено до тех пор, пока скорость не будет сброшена, таким образом, что водитель не будет чувствовать колебаний крутящего момента. В других примерах корректировка может происходить во время ускорения транспортного средства, однако перед применением скорректированных значений может быть необходимо вернуть педаль газа в исходное положение. Таким образом, значение функции преобразования может быть скорректировано до того, как устройство ввода управляющего воздействия водителя будет работать в положении, которое соответствует скорректированному значению. Кроме того, значения функции преобразования могут быть отрегулированы с шагом меньшим, чем первое значение, когда управляющее воздействие водителя, примененное через устройство ввода, превышает первое пороговое значение. При этом значения функции преобразования могут быть отрегулированы с шагом большим, чем первое значение, когда управляющего воздействия водителя, примененное через устройство ввода, не превышает первое пороговое значение.
На этапе 430 способ 400 предусматривает определение корректировки регулируемого запроса водителя при недостаточной производительности. Корректировка регулируемого запроса водителя при недостаточной производительности может увеличить крутящий момент двигателя при торможении для установленного управляющего воздействия водителя таким образом, что ускорение транспортного средства происходит со скоростью, превышающей скорость ускорения транспортного средства с использованием текущего значения корректировки регулируемого запроса водителя. В одном примере, регулируемый запрос водителя при недостаточной производительности может быть взят из таблицы или функции корректировок, определенных опытным путем. В других примерах корректировка регулируемого запроса водителя при недостаточной производительности может быть основана на разнице между требуемым показателем запуска и фактическим показателем запуска, умноженным на заранее заданный коэффициент. После определения корректировки регулируемого запроса водителя при недостаточной производительности способ 400 переходит к этапу 432.
На этапе 432 оценивают, находится ли корректировка регулируемого запроса водителя при недостаточной производительности в заранее заданных вычисленных пределах. Например, может быть оценено, что корректировка находится в определенном диапазоне значений. Если в способе 400 определено, что корректировка находится в вычисленных пределах, то ответ «ДА» и способ 400 переходит к этапу 434. В противном случае способ 400 завершается, и обновления корректировки регулируемого запроса водителя не происходит.
На этапе 434 способ 400 предусматривает обновление корректировки регулируемого запроса водителя путем увеличения значения корректировки, использованной на этапе 404. В частности, значение корректировки, примененное на этапе 404, увеличивают на величину, определенную на этапе 430. Таким образом, корректировка регулируемого запроса водителя может быть выполнена с учетом режимов, в которых транспортное средство работает не при полном весе транспортного средства.
На Фиг.5 представлен второй способ работы и повышения производительности транспортного средства. Способ, представленный на Фиг.5, может обеспечивать выполнение последовательности операций, показанной на Фиг.3.
На этапе 502 способ 500 предусматривает определение наличия входного сигнала о запросе водителя. Входной сигнал о запросе водителя может быть получен от педали газа, рычага или другого устройства. В одном примере входной сигнал о запросе водителя преобразует движение ноги водителя в электрическое напряжение. После определения наличия входного сигнала о запросе водителя способ 500 переходит к этапу 504.
На этапе 504 происходит определение режимов работы транспортного средства. Рабочие режимы двигателя могут включать в себя, без ограничения перечисленным, скорость вращения двигателя, скорость транспортного средства, нагрузку двигателя, передачу трансмиссии и температуру двигателя. После того как были определены рабочие режимы транспортного средства, способ 500 переходит на этап 506.
На этапе 506 способ 500 предусматривает определение запрашиваемого водителем крутящего момент из таблицы. В одном примере запрашиваемый водителем крутящий момент определяют путем индексирования таблицы, сохраненной в памяти. Таблица может быть индексирована с помощью входного сигнала о запросе водителя. Таблица может содержать элементы, которые представляют собой функцию преобразования, и функция преобразования выдает крутящий момент двигателя при торможении, требуемый крутящий момент на колесах, крутящий момент крыльчатки преобразователя или крутящий момент другой передачи. Результат вычисления функции преобразования может быть затем уточнен в зависимости от режимов работы транспортного средства. Например, запрашиваемый водителем крутящий момент может быть уменьшен при низких температурах двигателя. После того как был определен запрашиваемый водителем крутящий момент, способ 500 переходит к этапу 508.
На этапе 508 способ 500 предусматривает определение рабочих условий окружающей среды. Условия окружающей среды могут включать в себя, без ограничения перечисленным, барометрическое давление, уклон дороги и температуру окружающего воздуха. После того как были определены условия окружающей среды, способ 500 переходит к этапу 510.
На этапе 510 способ 500 предусматривает определение показателей запуска транспортного средства. Требуемые показатели запуска транспортного средства могут быть определены так, как это описано в отношении этапа 411 на Фиг.4. После того как были определены показатели запуска транспортного средства, способ 500 переходит к этапу 512.
На этапе 512 способ 500 предусматривает определение фактических показателей запуска транспортного средства. Фактические показатели запуска транспортного средства могут быть определены так, как это описано в отношении этапа 412 на Фиг.4. После того как были определены фактические показатели запуска транспортного средства, способ 500 переходит к этапу 514.
На этапе 514 способ 500 предусматривает оценку, является ли абсолютное значение требуемого показателя запуска транспортного средства, за вычетом фактического показателя запуска транспортного, средства меньше порогового значения. Если разница не превышает пороговую скорость ускорения, то ответ «ДА», и способ 500 завершается. В противном случае ответ «НЕТ», и способ 500 переходит к этапу 516.
На этапе 516 оценивают, превышает ли требуемый показатель запуска фактический показатель запуска. Если это так, то ответ «ДА», и способ 500 переходит к этапу 530. В противном случае ответ «НЕТ», и способ 500 переходит к этапу 518.
На этапе 518 способ 500 предусматривает определение корректировки регулируемого запроса водителя при чрезмерной производительности. Корректировка регулируемого запроса водителя при чрезмерной производительности может уменьшить крутящий момент двигателя при торможении для установленного входного сигнала от водителя таким образом, что не происходит ускорения транспортного средства со скоростью, превышающей скорость ускорения транспортного средства при аналогичных условиях, когда вес транспортного средства равен его полному весу. В одном примере регулируемый запрос водителя при чрезмерной производительности может быть взят из таблицы или функции корректировок, определенных опытным путем. В других примерах корректировка регулируемого запроса водителя при чрезмерной производительности может быть основана на разнице между требуемым показателем запуска и фактическим показателем запуска, умноженным на заранее заданный коэффициент. После определения корректировки регулируемого запроса водителя при чрезмерной производительности способ 500 переходит к этапу 520.
На этапе 520 оценивают, находится ли корректировка регулируемого запроса водителя при чрезмерной производительности в заранее заданных вычисленных пределах. Например, может быть оценено, что корректировка регулируемого запроса водителя при чрезмерной производительности находится в определенном диапазоне значений. Если в способе 500 определено, что корректировка запроса водителя при чрезмерной производительности находится в вычисленных пределах, то ответ «ДА», и способ 500 переходит к этапу 534. В противном случае способ 500 завершается, и обновления корректировки регулируемого запроса водителя не происходит.
На этапе 534 способ 500 предусматривает обновление элементов таблицы с данными о запрашиваемом водителем крутящем моменте на основании текущих режимов работы двигателя и транспортного средства и корректировки регулируемого запроса водителя при недостаточной производительности (блок 530) или чрезмерной производительности (блок 518). В частности, значения, сохраненные в ячейках таблицы с данными о запрашиваемом водителем крутящем моменте могут быть увеличены или уменьшены на величину, основанную на результате вычисления на этапе 518 или 530. В одном варианте значение, определенное на этапе 530 или этапе 518, может непосредственно заменить значение, сохраненное в ячейке таблицы. Таким образом, таблица с данными о запрашиваемом водителем крутящем моменте может быть скорректирована с учетом режимов, когда транспортное средство не работает при своем полном весе. Основывая показатели запуска транспортного средства на его работе при полном весе, можно обеспечить более стабильную производительность транспортного средства, когда оно работает в широком диапазоне значений веса.
На этапе 530 способ 500 предусматривает определение корректировки регулируемого запроса водителя при недостаточной производительности. Корректировка регулируемого запроса водителя при недостаточной производительности может увеличить крутящий момент двигателя при торможении для установленного управляющего воздействия водителя таким образом, что ускорение транспортного средства происходит со скоростью, превышающей скорость ускорения транспортного средства с использованием текущего значения корректировки регулируемого запроса водителя. В одном примере регулируемый запрос водителя при недостаточной производительности может быть взят из таблицы или функции корректировок, определенных опытным путем. В других примерах корректировка регулируемого запроса водителя при недостаточной производительности может быть основана на разнице между требуемым показателем запуска и фактическим показателем запуска, умноженным на заранее заданный коэффициент. После определения корректировки регулируемого запроса водителя при недостаточной производительности способ 500 переходит к этапу 532.
На этапе 532 оценивают, находится ли корректировка регулируемого запроса водителя при недостаточной производительности в заранее заданных вычисленных пределах. Например, может быть оценено, что корректировка регулируемого запроса водителя при недостаточной производительности находится в определенном диапазоне значений. Если в способе 500 определено, что корректировка запроса водителя при недостаточной производительности находится в вычисленных пределах, то ответ «ДА», и способ 500 переходит к этапу 534. В противном случае способ 500 завершается, и обновления корректировки регулируемого запроса водителя не происходит.
На Фиг.6 представлен третий способ работы и повышения производительности транспортного средства. Способ, представленный на Фиг.6, может обеспечивать выполнение последовательности, показанной на Фиг.3.
На этапе 602 способ 600 предусматривает определение веса или массы транспортного средства. Вес транспортного средства может быть определен с помощью датчика высоты транспортного средства, акселерометра транспортные средства, спрогнозирован на основании данных об ускорении транспортного средства и крутящего момента двигателя при торможении, или определен на основании выходного сигнала ограничителя давления тормозной системы. Вес транспортного средства может включать в себя вес прицепа, присоединенного к транспортному средству. В некоторых примерах корректировка регулируемого запроса водителя может быть возращена на нулевое значение, когда двигатель работает без регулировки выходного запроса водителя, если определено, что транспортное средство работает при своем полном весе. После определения веса или массы транспортного средства, способ 600 переходит к этапу 603.
На этапе 603 способ 600 предусматривает определение регулировки нагрузки, запрашиваемой водителем, как функции нагрузки или веса транспортного средства. В одном примере происходит индексирование функции значений определенной регулировки нагрузки, запрашиваемой водителем, в соответствии с определенным весом транспортного средства, и результатом вычисления функции является регулировка запрашиваемой водителем нагрузки. После определения значения регулировки запрашиваемой водителем нагрузки способ 600 переходит к этапу 604.
На этапе 604 способ 600 предусматривает добавление значения корректировки регулируемого запроса водителя к значению регулировки запрашиваемой водителем нагрузки. Корректировка запроса водителя может быть определена так, как это описано в отношении этапов 632 и 626. В некоторых примерах корректировка запроса водителя может быть представлена в виде функции преобразования, которая может быть сохранена в массиве памяти контроллера. После того как значение корректировки регулируемого запроса водителя было добавлено к значению регулировки запрашиваемой водителем нагрузки, способ 600 переходит к этапу 606.
На этапе 606 способ 600 предусматривает определение входного сигнала о запросе водителя. Входной сигнал о запросе водителя может быть получен от педали газа, рычага или другого устройства. В одном примере входной сигнал о запросе водителя преобразует движение ноги водителя в электрическое напряжение. После определения входного сигнала о запросе водителя способ 600 переходит к этапу 608.
На этапе 608 способ 600 предусматривает добавление суммы значения корректировки регулируемого запроса водителя и значения регулировки запрашиваемой водителем нагрузки к входному сигналу о запросе водителя. Таким образом, входной сигнал о запросе водителя отрегулирован таким образом, чтобы изменить режим работы двигателя. После уточнения входного сигнала о запросе водителя способ 600 переходит к этапу 610.
На этапе 610 определяют режимы работы транспортного средства. Рабочие режимы двигателя могут включать в себя, без ограничения перечисленным, скорость вращения двигателя, скорость транспортного средства, нагрузку двигателя, передачу трансмиссии и температуру двигателя. После того как были определены рабочие режимы транспортного средства, способ 600 переходит к этапу 612.
На этапе 612 способ 600 предусматривает определение рабочих условий окружающей среды. Условия окружающей среды могут включать в себя, без ограничения перечисленным, барометрическое давление, уклон дороги и температуру окружающего воздуха. Условия окружающей среды могут также регулировать значение корректировки запроса водителя. Например, значение корректировки регулируемого запроса водителя может быть умножено на коэффициент, выраженный в виде текущего барометрического давления, деленного на номинальное барометрическое давление, если барометрическое давление меняется. После того как были определены условия окружающей среды, способ 600 переходит к этапу 614.
На этапе 614 способ 600 предусматривает определение показателей запуска транспортного средства. Требуемые показатели запуска транспортного средства могут быть определены так, как это описано в отношении этапа 411 на Фиг.4. После того как были определены показатели запуска транспортного средства, способ 600 переходит к этапу 616.
На этапе 616 способ 600 предусматривает определение фактических показателей запуска транспортного средства. Фактические показатели запуска транспортного средства могут быть определены так, как это описано в отношении этапа 412 на Фиг.4. После того как были определены фактические показатели запуска транспортного средства, способ 600 переходит к этапу 514.
На этапе 618 способ 600 предусматривает оценку, является ли абсолютное значение требуемого показателя запуска транспортного средства, за вычетом фактического показателя запуска транспортного средства, меньше порогового значения. Если разница не превышает пороговую скорость ускорения, то ответ «ДА», и способ 600 завершается. В противном случае ответ «НЕТ», и способ 600 переходит к этапу 620.
На этапе 620 оценивают, превышает ли требуемый показатель запуска фактический показатель запуска. Если это так, то ответ «ДА», и способ 600 переходит к этапу 628. В противном случае ответ «НЕТ», и способ 600 переходит к этапу 622.
На этапе 622 способ 600 предусматривает определение корректировки регулируемого запроса водителя при чрезмерной производительности. Корректировка регулируемого запроса водителя при чрезмерной производительности может уменьшить крутящий момент двигателя при торможении для установленного управляющего воздействия водителя таким образом, что не происходит ускорения транспортного средства со скоростью, превышающей скорость ускорения при аналогичных условиях, когда вес транспортного средства равен его полному весу. В одном примере регулируемый запрос водителя при чрезмерной производительности может быть взят из таблицы или функции корректировок регулируемого запроса водителя при чрезмерной производительности, определенных опытным путем. В других примерах корректировка регулируемого запроса водителя при чрезмерной производительности может быть основана на разнице между требуемым показателем запуска и фактическим показателем запуска, умноженным на заранее заданный коэффициент. После определения корректировки регулируемого запроса водителя при чрезмерной производительности способ 600 переходит к этапу 624.
На этапе 624 оценивают, находится ли корректировка регулируемого запроса водителя при чрезмерной производительности в заранее заданных вычисленных пределах. Например, может быть оценено, что корректировка регулируемого запроса водителя при чрезмерной производительности находится в определенном диапазоне значений. Если в способе 600 определяют, что корректировка запроса водителя при чрезмерной производительности находится в вычисленных пределах, то ответ «ДА», и способ 600 переходит к этапу 626. В противном случае способ 600 завершается, и обновления корректировки регулируемого запроса водителя не происходит.
На этапе 626 способ 600 предусматривает обновление корректировки регулируемого запроса водителя путем уменьшения корректировки регулируемого запроса водителя, использованной на этапе 604. В частности, значение корректировки регулируемого запроса водителя, примененное на этапе 604, уменьшают на значение корректировки регулируемого запроса водителя при чрезмерной производительности, определенное на этапе 622. Таким образом, корректировка регулируемого запроса водителя может быть выполнена с учетом режимов, в которых транспортное средство не работает при своем полном весе. Основывая показатели запуска транспортного средства на работе транспортного средства при его полном весе, можно обеспечить более стабильную производительность транспортного средства, когда оно работает в широком диапазоне значений веса. Кроме того, в некоторых примерах за один раз может быть настроено более одного значения функции преобразования. Например, если определено, что конкретное значение функции преобразования должно быть увеличено на 2%, то все другие значения функции преобразования, включая значения, превышающие текущее значение, могут быть также увеличены на 2%.
На этапе 628 способ 600 предусматривает определение корректировки регулируемого запроса водителя при недостаточной производительности. Корректировка регулируемого запроса водителя при недостаточной производительности может увеличивать крутящий момент двигателя при торможении для установленного управляющего воздействия водителя таким образом, что ускорение транспортного средства происходит со скоростью, превышающей скорость ускорения транспортного средства с использованием текущего значения корректировки регулируемого запроса водителя. В одном примере, регулируемый запрос водителя при недостаточной производительности может быть взят из таблицы или функции корректировок регулируемого запроса водителя при недостаточной производительности, определенных опытным путем. В других примерах корректировка регулируемого запроса водителя при недостаточной производительности может быть основана на разнице между требуемым показателем запуска и фактическим показателем запуска, умноженным на заранее заданный коэффициент. После определения корректировки регулируемого запроса водителя при недостаточной производительности способ 600 переходит к этапу 630.
На этапе 630 оценивают, находится ли корректировка регулируемого запроса водителя при недостаточной производительности в заранее заданных вычисленных пределах. Например, может быть оценено, что корректировка регулируемого запроса водителя при недостаточной производительности находится в определенном диапазоне значений. Если в способе 600 определяют, что корректировка запроса водителя при недостаточной производительности находится в вычисленных пределах, то ответ «ДА», и способ 600 переходит к этапу 632. В противном случае способ 600 завершается, и обновления корректировки регулируемого запроса водителя не происходит.
На этапе 632 способ 600 предусматривает обновление корректировки регулируемого запроса водителя путем увеличения корректировки регулируемого запроса водителя, использованной на этапе 604. В частности, значение корректировки регулируемого запроса водителя, примененное на этапе 604, увеличивают на значение корректировки регулируемого запроса водителя при недостаточной производительности, определенное на этапе 628. Таким образом, корректировка регулируемого запроса водителя может быть выполнена с учетом режимов, в которых транспортное средство не работает при своем полном весе.
На Фиг.7 представлен четвертый способ работы и повышения производительности транспортного средства. Способ, представленный на Фиг.7, может обеспечивать выполнение последовательности операций, показанной на Фиг.3.
На этапе 702 способ 700 предусматривает определение входного сигнала о запросе водителя. Входной сигнал о запросе водителя может быть получен от педали газа, рычага или другого устройства. В одном примере входной сигнал о запросе водителя преобразует движение ноги водителя в электрическое напряжение. После определения входного сигнала о запросе водителя способ 700 переходит к этапу 704.
На этапе 704 определяют режимы работы транспортного средства. Рабочие режимы двигателя могут включать в себя, без ограничения перечисленным, скорость вращения двигателя, скорость транспортного средства, нагрузку двигателя, передачу трансмиссии и температуру двигателя. После того как были определены рабочие режимы транспортного средства, способ 700 переходит к этапу 706.
На этапе 706 способ 700 предусматривает определение запрашиваемого водителем крутящего момента из таблицы. В одном примере запрашиваемый водителем крутящий момент определяют путем индексирования таблицы, сохраненной в памяти. Таблица может быть индексирована с помощью входного сигнала о запросе водителя. Таблица может иметь элементы, которые представляют собой функцию преобразования, и функция преобразования выдает крутящий момент двигателя при торможении, требуемый крутящий момент на колесах, крутящий момент крыльчатки преобразователя числа оборотов или крутящий момент другой трансмиссии. Результат вычисления функции преобразования может быть далее скорректирован в зависимости от режимов работы транспортного средства. Например, запрашиваемый водителем крутящий момент может быть уменьшен при низких температурах двигателя. После того как был определен запрашиваемый водителем крутящий момент, способ 700 переходит к этапу 708.
На этапе 708 способ 700 предусматривает определение рабочих условий окружающей среды. Условия окружающей среды могут включать в себя, без ограничения перечисленным, барометрическое давление, уклон дороги и температуру окружающего воздуха. После того как были определены условия окружающей среды, способ 700 переходит к этапу 710.
На этапе 710 способ 700 предусматривает определение показателей запуска транспортного средства. Требуемые показатели запуска транспортного средства могут быть определены так, как это описано в отношении этапа 411 на Фиг.4. После того как были определены показатели запуска транспортного средства, способ 700 переходит к этапу 712.
На этапе 712 способ 700 предусматривает определение фактических показателей запуска транспортного средства. Фактические показатели запуска транспортного средства могут быть определены так, как это описано в отношении этапа 412 на Фиг.4. После того как были определены фактические показатели запуска транспортного средства, способ 700 переходит к этапу 714.
На этапе 714 способ 700 предусматривает оценку, является ли абсолютное значение требуемого показателя запуска транспортного средства, за вычетом фактического показателя запуска транспортного средства, меньше порогового значения. Если разница не превышает пороговую скорость ускорения, то ответ «ДА», и способ 700 завершается. В противном случае ответ «НЕТ», и способ 700 переходит к этапу 716.
На этапе 716 оценивают, превышает ли требуемый показатель запуска фактический показатель запуска. Если это так, то ответ «ДА», и способ 700 переходит к этапу 730. В противном случае ответ «НЕТ», и способ 700 переходит к этапу 718.
На этапе 718 способ 700 предусматривает определение корректировки регулируемого запроса водителя при чрезмерной производительности. Корректировка регулируемого запроса водителя при чрезмерной производительности может уменьшать крутящий момент двигателя при торможении для установленного управляющего воздействия водителя таким образом, что не происходит ускорения транспортного средства со степенью, превышающей степень ускорения транспортного средства при аналогичных условиях, когда вес транспортного средства равен его полному весу. В одном примере регулируемый запрос водителя при чрезмерной производительности может быть взят из таблицы или функции корректировок регулируемого запроса водителя при чрезмерной производительности, определенных опытным путем. В других примерах корректировка регулируемого запроса водителя при чрезмерной производительности может быть основана на разнице между требуемым показателем запуска и фактическим показателем запуска, умноженным на заранее заданный коэффициент. После определения корректировки регулируемого запроса водителя при чрезмерной производительности способ 700 переходит к этапу 720.
На этапе 720 оценивают, находится ли корректировка регулируемого запроса водителя при чрезмерной производительности в заранее заданных вычисленных пределах. Например, может быть оценено, что корректировка регулируемого запроса водителя при чрезмерной производительности находится в определенном диапазоне значений. Если в способе 700 определяют, что корректировка запроса водителя при чрезмерной производительности находится в вычисленных пределах, то ответ «ДА», и способ 700 переходит к этапу 734. В противном случае способ 700 переходит к этапу 722.
На этапе 722 способ 700 предусматривает определение коэффициента полезного действия (КПД) при минимальном вычисленном пределе. В одном примере КПД является параметром, который регулирует исполнительный механизм, воздействующий на производительность двигателя таким образом, что транспортное средство может работать при преимущественно одном и том же показателе производительности при различных значениях веса транспортного средства. Например, показатель производительности, который регулирует давление выше по потоку относительно турбины турбонагнетателя, может быть скорректирован таким образом, что ускорение транспортного средства происходит преимущественно с одинаковой скоростью (например, в пределах +0,4 км/с2) при полном весе транспортного средства и при 70% от полного транспортного средства. В некоторых примерах несколько коэффициентов полезного действия могут регулировать исполнительные механизмы таким образом, чтобы отрегулировать момент зажигания, момент впрыска топлива, такт клапана, давление на впуске турбины, давление наддува и поток рециркуляции отработавших газов (EGR). В одном примере КПД могут быть определены опытным путем и сохранены в памяти. КПД могут быть индексированы через вес транспортного средства или другой переменной величины, такой как фактические показатели производительности. КПД, определенные на этапе 722, основаны на минимальном значении корректировки запроса водителя. После определения КПД способ 700 переходит к этапу 724.
На этапе 724 оценивают, способно ли транспортное средство превысить производительность при широко открытой дроссельной заслонке (WOT) при текущем весе транспортного средства. Например, если при широко открытой дроссельной заслонке происходит ускорение транспортного средства со скоростью, превышающей требуемую скорость, то транспортное средство способно превысить производительность при широко открытой дроссельной заслонке. Если в способе 700 определяют, что транспортное средство способно превысить производительность при широко открытой дроссельной заслонке, то ответ «ДА», и способ 700 переходит к этапу 726. В противном случае ответ «НЕТ», и способ 700 переходит к этапу 738.
На этапе 730 способ 700 предусматривает определение корректировки регулируемого запроса водителя при недостаточной производительности. Корректировка регулируемого запроса водителя при недостаточной производительности может увеличивать крутящий момент двигателя при торможении для установленного управляющего воздействия водителя таким образом, что ускорение транспортного средства происходит со степенью, превышающей степень ускорения транспортного средства с использованием текущего значения корректировки регулируемого запроса водителя. В одном примере, регулируемый запрос водителя при недостаточной производительности может быть взят из таблицы или функции корректировок регулируемого запроса водителя при недостаточной производительности, определенных опытным путем. В других примерах корректировка регулируемого запроса водителя при недостаточной производительности может быть основана на разнице между требуемым показателем запуска и фактическим показателем запуска, умноженным на заранее заданный коэффициент. После определения корректировки регулируемого запроса водителя при недостаточной производительности способ 700 переходит к этапу 732.
На этапе 732 оценивают, находится ли корректировка регулируемого запроса водителя при недостаточной производительности в заранее заданных вычисленных пределах. Например, может быть оценено, что корректировка регулируемого запроса водителя при недостаточной производительности находится в определенном диапазоне значений. Если в способе 700 определяют, что корректировка запроса водителя при недостаточной производительности находится в вычисленных пределах, то ответ «ДА», И способ 700 переходит к этапу 734. В противном случае способ 700 завершается, и обновления корректировки регулируемого запроса водителя не происходит.
На этапе 734 способ 700 предусматривает определение одного или нескольких КПД на основании достижения требуемых показателей. Например, способ 700 определяет КПД на основании разности между фактической производительностью транспортного средства и требуемой производительностью транспортного средства. В одном примере ускорение транспортного средства представляет собой показатель производительности транспортного средства. Кроме того, способ 700 предусматривает индексирование функции, которая включает в себя определенные опытным путем КПД, извлекаемые на основании разности между требуемой производительностью и фактической производительностью. Например, коэффициенты полезного действия могут отрегулировать клапан с опережением на 5 градусов, снизить давление на впуске турбины и/или отрегулировать давление наддува. После определения КПД способ 700 переходит на этап 736.
На этапе 736 оценивают, будет или нет достигнута транспортным средством требуемая производительность при широко открытой дроссельной заслонке при текущем весе или нагрузке транспортного средства. В одном примере оценивают, будет ли достигнута транспортным средством производительность при широко открытой дроссельной заслонке, на основании скорости ускорения транспортного средства при заданной нагрузке двигателя. Если в способе 700 определяют, что транспортное средство не достигнет производительности при широко открытой дроссельной заслонке, то ответ «ДА», и способ 700 переходит к этапу 740. В противном случае ответ «НЕТ», и способ 700 переходит к этапу 738.
На этапе 738 способ 700 предусматривает поддержание параметров силовой передачи. Поддержание параметров силовой передачи осуществляют таким образом, чтобы поддерживать производительность транспортного средства на его текущем уровне. Например, моменты зажигания и момент впрыска топлива могут продолжать использоваться без корректировки.
На этапе 740 способ 700 предусматривает регулирование параметров силовой передачи таким образом, чтобы увеличить производительность двигателя при текущем весе или нагрузке транспортного средства. В одном примере может быть увеличено давление наддува турбонагнетателя. Кроме того, может быть установлено опережение момента зажигания, или момент впрыска топлива может быть также отрегулирован. После того как параметры силовой передачи были отрегулированы для увеличения производительности транспортного средства и двигателя при текущем весе транспортного средства, способ 700 завершается.
На Фиг.8 представлен второй способ эксплуатации и повышения производительности транспортного средства. Способ, представленный на Фиг.8, может обеспечивать выполнение последовательности операций, показанной на Фиг.3.
На этапе 802 способ 800 предусматривает определение входного сигнала о запросе водителя. Входной сигнал о запросе водителя может быть получен от педали газа, рычага или другого устройства. В одном примере осуществления изобретения входной сигнал о запросе водителя преобразует движение ноги водителя в электрическое напряжение. После определения входного сигнала о запросе водителя способ 800 переходит к этапу 804.
На этапе 804 определяют режимы работы транспортного средства. Рабочие режимы двигателя могут включать в себя, без ограничения перечисленным, скорость вращения двигателя, скорость транспортного средства, нагрузку двигателя, передачу трансмиссии и температуру двигателя. После того как были определены рабочие режимы транспортного средства, способ 800 переходит к этапу 806.
На этапе 806 способ 800 предусматривает определение запрашиваемого водителем крутящего момент из таблицы. В одном примере запрашиваемый водителем крутящий момент определяют путем индексирования таблицы, сохраненной в памяти. Таблица может быть индексирована с помощью входного сигнала о запросе водителя. Таблица может содержать элементы, которые представляют собой функцию преобразования, и функция преобразования выдает крутящий момент двигателя при торможении, требуемый крутящий момент на колесах, крутящий момент крыльчатки преобразователя числа оборотов или крутящий момент другой передачи. Результат вычисления функции преобразования затем может быть скорректирован в зависимости от режимов работы транспортного средства. Например, запрашиваемый водителем крутящий момент может быть уменьшен при низких температурах двигателя. После того как был определен запрашиваемый водителем крутящий момент, способ 800 переходит к этапу 808.
На этапе 808 способ 800 определяет рабочие условия окружающей среды. Условия окружающей среды могут включать в себя, не ограничиваясь этим, барометрическое давление, уклон дороги и температуру окружающего воздуха. После того как были определены условия окружающей среды, способ 800 переходит к этапу 810.
На этапе 510 способ 500 предусматривает определение показателей запуска транспортного средства. Требуемые показатели запуска транспортного средства могут быть определены так, как это описано в отношении этапа 411 на Фиг.4. После того как были определены показатели запуска транспортного средства, способ 500 переходит к этапу 512.
На этапе 812 способ 800 предусматривает определение фактических показателей запуска транспортного средства. Фактические показатели запуска транспортного средства могут быть определены так, как это описано в отношении этапа 412 на Фиг.4. После того как были определены фактические показатели запуска транспортного средства, способ 800 переходит к этапу 814.
На этапе 814 способ 800 предусматривает оценку, является ли абсолютное значение требуемого показателя запуска транспортного средства за вычетом фактического показателя запуска транспортного средства меньше порогового значения. Если разница не превышает пороговую скорость ускорения, то ответ «ДА», и способ 800 завершается. В противном случае ответ «НЕТ», и способ 800 переходит к этапу 816.
На этапе 816 оценивают, превышает ли требуемый показатель запуска фактический показатель запуска. Если это так, то ответ «ДА», и способ 800 переходит к этапу 830. В противном случае ответ «НЕТ», способ 800 переходит к этапу 818.
На этапе 818 способ 800 предусматривает определение множителя корректировки регулируемого запроса водителя при чрезмерной производительности. Множитель корректировки регулируемого запроса водителя при чрезмерной производительности может уменьшить крутящий момент двигателя при торможении для установленного управляющего воздействия водителя таким образом, что не происходит ускорения транспортного средства со скоростью, превышающей скорость ускорения транспортного средства при аналогичных условиях, когда вес транспортного средства равен его полному весу. В одном примере множитель регулируемого запроса водителя при чрезмерной производительности может быть взят из таблицы или функции корректировок регулируемого запроса водителя при чрезмерной производительности, определенных опытным путем. В других примерах множитель корректировки регулируемого запроса водителя при чрезмерной производительности может быть основан на разнице между требуемым показателем запуска и фактическим показателем запуска, умноженным на заранее заданный коэффициент. После определения множителя корректировки регулируемого запроса водителя при чрезмерной производительности, способ 800 переходит к этапу 820.
На этапе 820 оценивают, находится ли корректировка регулируемого запроса водителя в заранее заданных вычисленных пределах. Например, может быть оценено, что корректировка регулируемого запроса водителя при чрезмерной производительности находится в определенном диапазоне значений. Если в способе 800 определяют, что корректировка запроса водителя при чрезмерной производительности находится в вычисленных пределах, то ответ «ДА», и способ 800 переходит к этапу 834. В противном случае способ 800 завершается, и обновления корректировки регулируемого запроса водителя не происходит.
На этапе 834 способ 800 предусматривает обновление элементов таблицы с данными о запрашиваемом водителем крутящем моменте на основании текущих режимов работы двигателя и транспортного средства, а также множителя корректировки регулируемого запроса водителя при недостаточной производительности (блок 830) или чрезмерной производительности (блок 818). В частности, значения, сохраненные в ячейках таблицы с данными о запрашиваемом водителем крутящем моменте, могут быть увеличены или уменьшены на величину, основанную на умножении элемента таблицы на результат вычисления на этапе 818 или 830. Таким образом, таблица с данными о запрашиваемом водителем крутящем моменте может быть скорректирована с учетом режимов, когда транспортное средство не работает при своем полном весе. Основывая показатели запуска транспортного средства на его работе при полном весе, можно обеспечить более стабильную производительность транспортного средства, когда оно работает в широком диапазоне значений веса.
На этапе 830 способ 800 предусматривает определение корректировки регулируемого запроса водителя при недостаточной производительности. Корректировка регулируемого запроса водителя при недостаточной производительности может увеличить крутящий момент двигателя при торможении для установленного управляющего воздействия водителя таким образом, что ускорение транспортного средства происходит со скоростью, превышающей скорость ускорения транспортного средства с использованием текущего значения корректировки регулируемого запроса водителя. В одном примере регулируемый запрос водителя при недостаточной производительности может быть взят из таблицы или функции корректировок регулируемого запроса водителя при недостаточной производительности, определенных опытным путем. В других примерах корректировка регулируемого запроса водителя при недостаточной производительности может быть основана на разнице между требуемым показателем запуска и фактическим показателем запуска, умноженным на заранее заданный коэффициент. После определения корректировки регулируемого запроса водителя при недостаточной производительности, способ 800 переходит к этапу 832.
На этапе 832 оценивают, находится ли корректировка регулируемого запроса водителя при недостаточной производительности в заранее заданных вычисленных пределах. Например, может быть оценено, что корректировка регулируемого запроса водителя при недостаточной производительности находится в определенном диапазоне значений. Если в способе 800 определяют, что корректировка запроса водителя при недостаточной производительности находится в вычисленных пределах, то ответ «ДА», и способ 8500 переходит к этапу 834. В противном случае способ 800 завершается, и обновления корректировки регулируемого запроса водителя не происходит.
Таким образом, способы, представленные на Фиг.4-8 относятся к способам эксплуатации и повышения производительности транспортного средства, включающим в себя: обеспечение наличия устройства ввода управляющего воздействия водителя, предназначенного для определения запрашиваемого водителем крутящего момента; преобразование сигнала, поступившего от устройства ввода управляющего воздействия водителя, в запрашиваемый водителем крутящий момент, с помощью функции преобразования, основанной на работе транспортного средства при его полном весе; и корректировку функции преобразования, если вес транспортного средства меньше его полного веса. Устройство ввода управляющего воздействия водителя представляет собой педаль газа, а способ также включает в себя оценку массы транспортного средства с помощью датчика высоты транспортного средства.
В некоторых примерах функцию преобразования корректируют в зависимости от значения барометрического значения. Регулировку КПД также корректируют, если вес транспортного средства меньше его полного веса. Положение устройства ввода управляющего воздействия водителя изменяется при движении ноги водителя, а способ также предусматривает корректировку значений функции преобразования, которые превышают текущее значение функции преобразования. Способ также предусматривает корректировку функции преобразования при определенных внешних условиях, включая барометрическое давление. Если параметр не находится в заранее заданных пределах, корректировку функции преобразования не производят.
В некоторых других примерах способы, представленные на Фиг.4-8, предназначены для эксплуатации двигателя транспортного средства и включают в себя: применение устройства ввода управляющего воздействия водителя, с целью определения запрашиваемого водителем крутящего момента; преобразование сигнала, поступившего от устройства ввода управляющего воздействия водителя, в запрашиваемый водителем крутящий момент, с помощью функции преобразования, основанной на работе транспортного средства при его полном весе; корректировку функции преобразования до первой скорости, если параметр транспортного средства превышает первое пороговое значение; и возврат функции преобразования к исходной функции преобразования, когда параметр транспортного средства не превышает второе пороговое значение.
Функция преобразования может быть немедленно возвращена к исходной функции преобразования, если параметр транспортного средства не превышает второе пороговое значение. Функция преобразования может быть скорректирована после отпускания педали газа. Функция преобразования может быть скорректирована, если устройство ввода управляющего воздействия водителя находится в исходном положении. Значение функции преобразования может быть скорректировано до того, как устройство ввода управляющего воздействия водителя начнет работать в положении, которое соответствует скорректированному значению. Значения функции преобразования могут быть отрегулированы с шагом меньшим, чем первое значение, когда устройство ввода управляющего воздействия водителя применено при первом значении, превышающим первое пороговое значение. Значения функции преобразования могут быть отрегулированы с шагом большим, чем первое значение, когда устройство ввода управляющего воздействия водителя применено при втором значении, не превышающим первое пороговое значение. Способ также предусматривает регулировку КПД при в зависимости от требуемой производительности транспортного средства. Способ также предусматривает ограничение ускорения транспортного средства, когда его вес меньше, чем полный вес, при этом ускорение транспортного средства ограничивают до ускорения, выполняемого при полном весе.
Специалисту в данной области будет понятно, что способ, описанный на Фиг.4-8, может воспроизводить один или несколько принципов обработки, такие как принцип событийного управления, управления прерываниями, многозадачный режим, многопоточный режим, и прочие. По существу, различные действия, операции или функции могут быть выполнены в указанной последовательности, параллельно, или, в некоторых случаях, пропущены. Аналогично, порядок действий не является обязательным, чтобы достичь характеристик и эффекта описанных примерных вариантов выполнения, он представлен для объяснения иллюстраций и описания. Одно или более проиллюстрированных действий или функций может быть повторено в зависимости от конкретной используемой стратегии. Кроме того, способы могут быть сохранены в качестве выполняемых команд в постоянной памяти системы, представленной на Фиг.1 и 2.
Специалистам в данной области понятно, что допускаются различные изменения и модификации изобретения без выхода за рамки его сущности. Например, описанная выше технология может применяться к двигателям I2, I3, I4, I5, V6, V8, V10, V12 и V16, а также двигателям, работающим на природном газе, газолине, дизельном топливе или альтернативном топливе.



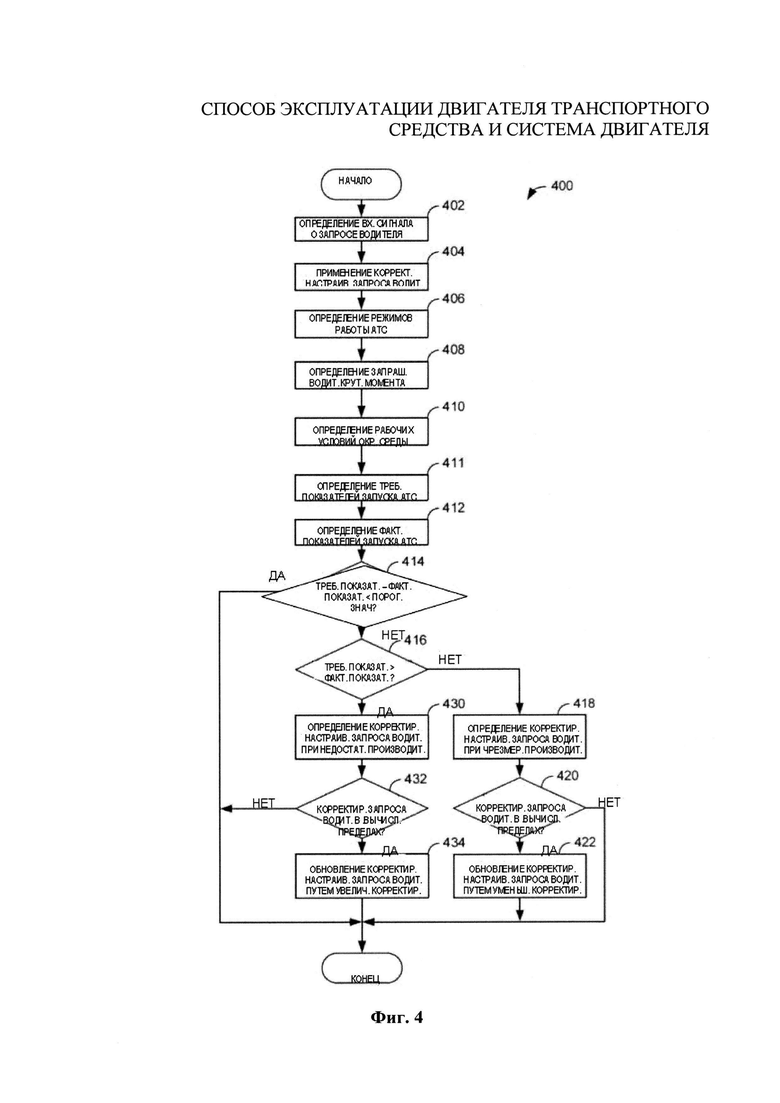

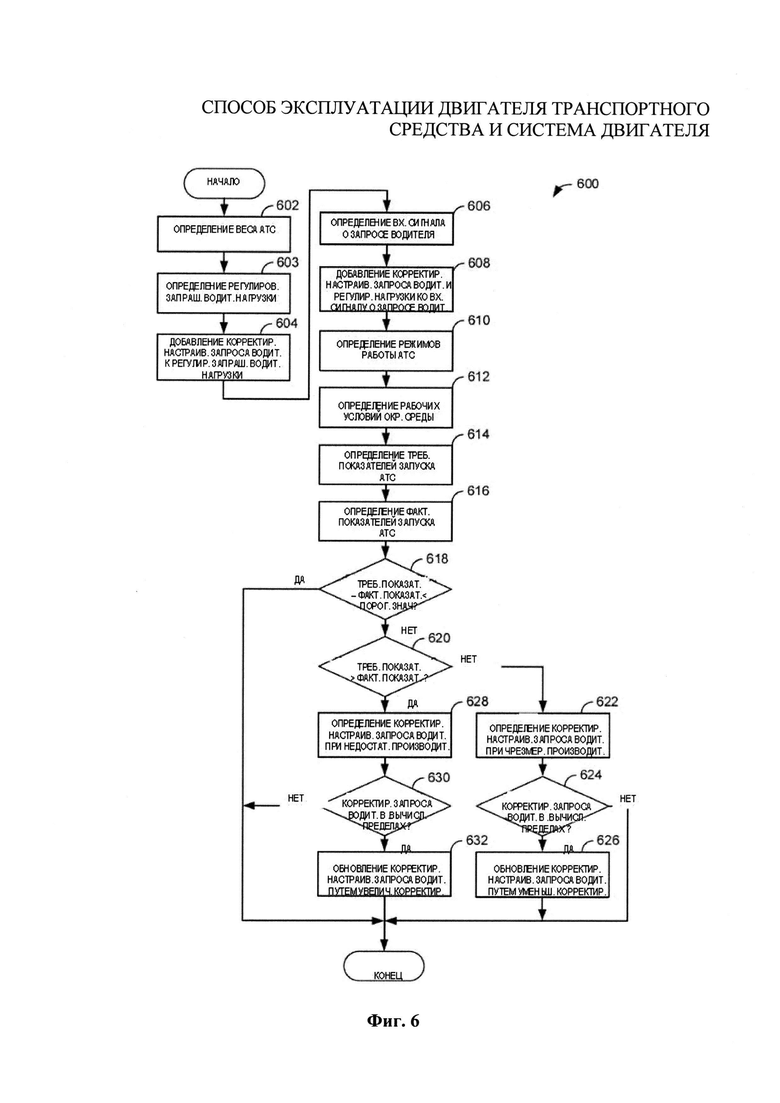


Изобретение относится к системам улучшения эффективности работы автомобильного транспортного средства, которое может работать при широком диапазоне значений веса транспортного средства. Система двигателя для транспортного средства содержит двигатель (10), включающий в себя исполнительный механизм, и контроллер (12), функционально связанный с двигателем (10) и исполнительным механизмом. Контроллер (12) содержит команды, хранящиеся в постоянной памяти, на преобразование с помощью значений в таблице сигнала от устройства ввода водителя (130) в крутящий момент, требуемый водителем, и дополнительные команды на использование значений в таблице в соответствии с разницей между заданным ускорением транспортного средства и фактическим ускорением транспортного средства, и дополнительные команды на регулировку исполнительного механизма с помощью контроллера, чтобы изменять крутящий момент двигателя в соответствии со значениями в таблице. Предложены также системы двигателя транспортного средства. Достигается обеспечение меньшего расхода топлива при меньшей нагрузке. Достигается более постоянный уровень производительности транспортного средства даже при изменяющихся нагрузках. Достигается уменьшение износа узлов трансмиссии. 3 н. и 13 з.п. ф-лы, 8 ил.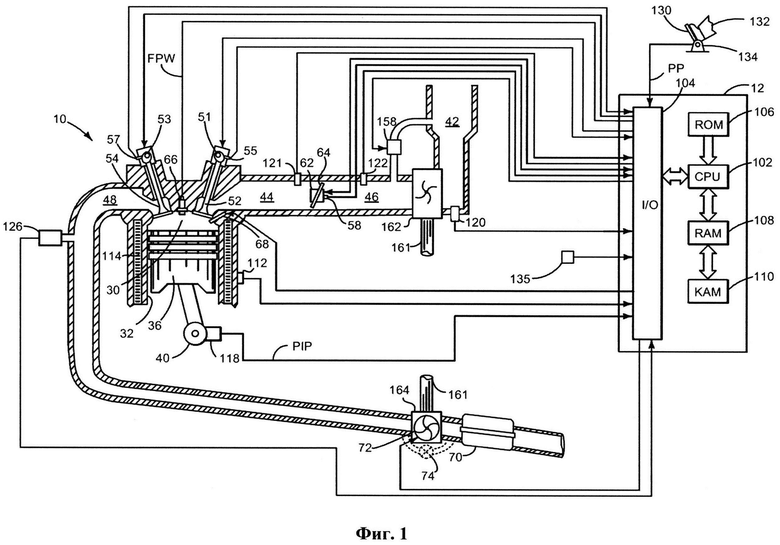
1. Система двигателя для транспортного средства, содержащая двигатель, включающий в себя исполнительный механизм, и контроллер, функционально связанный с двигателем и исполнительным механизмом, причём контроллер содержит команды, хранящиеся в постоянной памяти, на преобразование с помощью значений в таблице сигнала от устройства ввода водителя в крутящий момент, требуемый водителем, и дополнительные команды на использование значений в таблице в соответствии с разницей между заданным ускорением транспортного средства и фактическим ускорением транспортного средства, и дополнительные команды на регулировку исполнительного механизма с помощью контроллера, чтобы изменять крутящий момент двигателя в соответствии со значениями в таблице.
2. Система двигателя по п. 1, в которой устройство ввода водителя является педалью акселератора и которая дополнительно содержит дополнительные команды на расчет веса транспортного средства с помощью датчика высоты транспортного средства.
3. Система двигателя по п. 1, в которой значения в таблице изменяются в соответствии с барометрическим давлением.
4. Система двигателя по п. 1, в которой значения в таблице изменяются с помощью настраиваемого устройства умножения коррекции по требованию водителя.
5. Система двигателя по п. 1, в которой положение устройства ввода водителя меняется при повороте стопы водителя и которая дополнительно содержит дополнительные команды на определение недостаточно эффективного устройства умножения, если заданное ускорение транспортного средства превышает фактическое ускорение транспортного средства.
6. Система двигателя по п. 5, которая дополнительно содержит дополнительные команды на определение избыточно эффективного устройства умножения, если заданное ускорение транспортного средства меньше фактического ускорения транспортного средства.
7. Система двигателя по п. 5, которая дополнительно содержит дополнительные команды на остановку для изменения значений в таблице, если недостаточно эффективное устройство умножения находится вне диапазона значений.
8. Система двигателя транспортного средства, содержащая двигатель, включающий в себя множество исполнительных механизмов, и контроллер, функционально связанный с двигателем и множеством исполнительных механизмов, причем контроллер содержит команды, хранящиеся в постоянной памяти, на преобразование сигнала от устройства ввода водителя в крутящий момент, требуемый водителем, и на определение множества параметров, которые регулируют по меньшей мере один из множества исполнительных механизмов, если разница между заданным ускорением транспортного средства и фактическим ускорением транспортного средства превышает пороговое значение, и недостаточно эффективная настраиваемая коррекция по требованию водителя находится в заданных пределах, при этом недостаточно эффективная настраиваемая коррекция по требованию водителя основана на разнице между заданным ускорением транспортного средства и фактическим ускорением транспортного средства, умноженным на заданный коэффициент, и дополнительные команды на регулирование по меньшей мере одного из множества исполнительных механизмов с помощью контроллера для изменения крутящего момента двигателя, когда недостаточно эффективная настраиваемая коррекция по требованию водителя находится в заданных пределах.
9. Система двигателя по п. 8, которая дополнительно содержит дополнительные команды на определение того, достигнет ли транспортное средство работы при полностью открытой дроссельной заслонке на степени разгона транспортного средства при заданной нагрузке на двигатель.
10. Система двигателя транспортного средства, содержащая двигатель, включающий в себя исполнительный механизм, турбонагнетатель, связанный с двигателем, и контроллер, функционально связанный с двигателем и турбонагнетателем, причем контроллер содержит команды, хранящиеся в постоянной памяти, на регулировку изменяемого ввода водителя для добавления настраиваемой коррекции по требованию водителя к изменяемому вводу водителя, причем настраиваемая коррекция по требованию водителя регулируется, если абсолютная величина заданного ускорения транспортного средства минус фактическое ускорение транспортного средства составляет не меньше порогового значения, и дополнительные команды на регулирование исполнительного механизма с помощью контроллера согласно регулируемому изменяемому вводу водителя.
11. Система двигателя по п. 10, которая дополнительно содержит дополнительные команды на переустановку настраиваемой коррекции по требованию водителя на ноль, если заданное ускорение транспортного средства минус фактическое ускорение транспортного средства составляет меньше первой пороговой величины.
12. Система двигателя по п. 11, которая дополнительно содержит дополнительные команды для регулирования настраиваемой коррекции по требованию водителя на основании заданного ускорения транспортного средства минус фактическое ускорение транспортного средства, умноженного на заданный коэффициент.
13. Система двигателя по п. 10, в которой настраиваемая коррекция по требованию водителя берется из таблицы эмпирически определенных коррекций по требованию водителя.
14. Система двигателя по п. 10, в которой приводной механизм является приводным механизмом срабатывания клапана.
15. Система двигателя по п. 10, которая дополнительно содержит дополнительные команды на регулировку изменяемого ввода водителя в соответствии с весом транспортного средства.
16. Система двигателя по п. 10, которая дополнительно содержит дополнительные команды на регулировку настраиваемой коррекции по требованию водителя в соответствии с барометрическим давлением.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

