Область техники
Настоящее изобретение, в общем, находит применение в области машин для упаковки продуктов и, в частности, относится к машине для закрывания гибких упаковок.
Уровень техники
В области упаковки пищевых продуктов известно использование упаковок или мешков, изготовленных из гибкого материала, такого как пластик или бумага, которые имеют горловину с отверстием, предназначенным для введения и/или удаления одного или нескольких продуктов и повторного закрывания с использованием тесьмы, ленты или любого другого жесткого или полужесткого листового элемента.
Последний оборачивают таким образом, чтобы позволить пользователю снова открыть мешок и вынуть продукты через отверстие.
В частности, известно использование лент или полос, обычно называемых зажимами, которые подаются с катушки и отрезаются по размеру непосредственно перед этапом закрывания, чтобы окружить горловину мешка рядом с отверстием и повторно закрыть его.
Обычно предприятия малого и среднего бизнеса, такие как пекарни или магазины по продаже деликатесов, используют машины для закрывания мешков, имеющие раму с позицией для ручного размещения горловины мешка, на котором осуществляется этап закрывания.
Корпус для катушки с закрывающей лентой расположен рядом с этой позицией, и лента управляемо разматывается с помощью периодически работающего фрикционного диска, чтобы переместить одну часть определенной длины в какой-то момент времени рядом с позицией для закрывания.
Эта часть должна окружать горловину мешка, и ее отрезает нож, который перемещается перпендикулярно закрывающей ленте.
Затем нож подталкивает отрезанную часть в позицию для закрывания, на которой упорная стенка заставляет ее деформироваться и окружать горловину мешка, чтобы закрыть его.
В машинах, предназначенных для этой конкретной области, все перемещения разных деталей, таких как опора катушки, фрикционный диск, нож и любые вспомогательные детали, такие как штамповальное устройство для переноса текста на ленту, обычно приводятся в действие пневматическими приводами.
Может быть предусмотрен блок управления для управления подачей воздуха на разные устройства, чтобы координировать их перемещения.
Эти решения кажутся явно имеющими недостатки в том, что они требуют специального устройства для подачи в машину сжатого воздуха в помещение, где происходит упаковка, что явно увеличивает накладные расходы и вводит ограничения по месту установки машины.
Кроме того, координация перемещений разных деталей является сложной и не всегда точной.
Раскрытие изобретения
Цель настоящего изобретения заключается в том, чтобы устранить вышеуказанные недостатки, предложив машину для закрывания гибких упаковок, которая является высокоэффективной и относительно экономичной.
Одна конкретная цель заключается в том, чтобы предложить машину для закрывания гибких упаковок, которая является портативной и может быть установлена в любом помещении, не требуя заранее наличия источника сжатого воздуха.
Еще одна цель заключается в том, чтобы предложить машину для закрывания гибких упаковок, которая обеспечивает синхронное перемещение ее деталей, используя точное и недорогое средство.
Эти и другие цели, которые лучше объяснены ниже, достигнуты машиной для закрывания гибких упаковок по пункту 1 формулы изобретения.
Предпочтительные варианты осуществления изобретения определены в зависимых пунктах формулы изобретения.
Краткое описание чертежей
Другие характеристики и преимущества изобретения станут более очевидными при прочтении подробного описания предпочтительного, неисключительного варианта осуществления машины для закрывания гибких упаковок изобретения, который описан как не ограничивающий пример с помощью прилагаемых чертежей, на которых:
ФИГ. 1 - перспективный вид машины согласно изобретению;
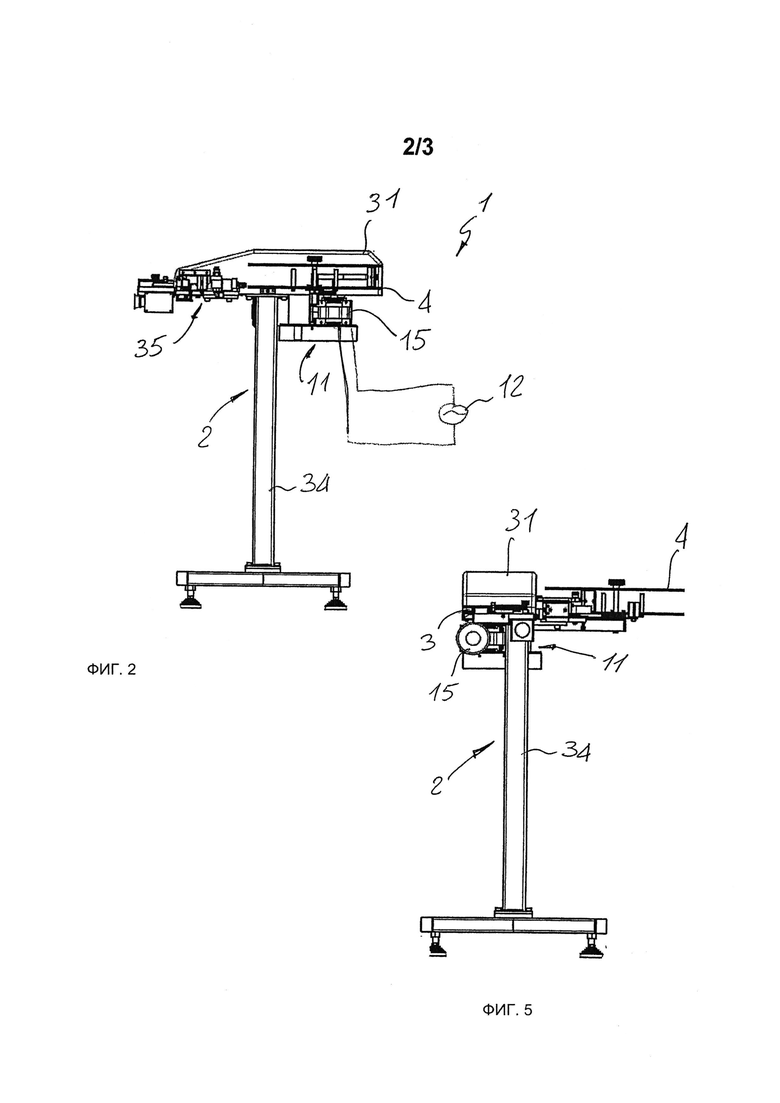
ФИГ. 2 - вид сбоку машины с Фиг.1;
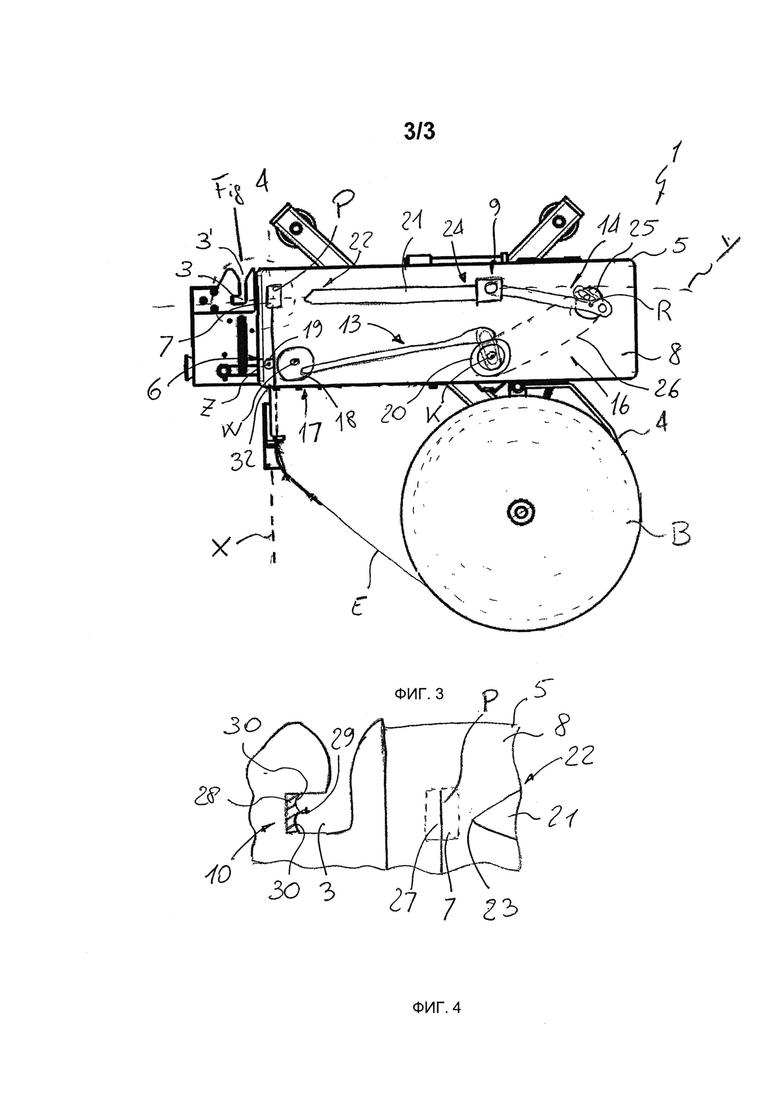
ФИГ. 3 - вид сверху машины с Фиг.1 с некоторыми элементами, не показанными для более четкого вида изнутри;
ФИГ. 4 - вид сверху в разрезе детали машины с Фиг.1;
ФИГ. 5 - вид спереди машины с Фиг.1;
ФИГ. 6 - последовательность закрывания упаковки.
Подробное описание предпочтительного варианта осуществления
Со ссылкой на вышеуказанные фигуры чертежей, машина согласно изобретению, в общем обозначенная цифрой 1, может быть использована для повторного закрывания упаковок или мешков C, изготовленных из полимерного материала, бумаги или металлического материала, которые имеют горловину N с отверстием A для вынимания продуктов из них.
Упаковки C могут быть предназначены для содержания продуктов любого типа, возможно пищевых, без каких-либо конкретных ограничений.
Машина 1 изобретения портативная и может быть размещена в любом помещении, имеющем соединение с электросетью или любым другим источником напряжения.
Как показано на Фиг.1 и Фиг.2, машина 1 включает опорную раму 2, которая может быть установлена на полу и имеет формующее или закрывающее посадочное место 3, позволяющее вручную положить на него и закрыть горловину N упаковки C.
Формующее посадочное место 3 расположено на конце паза 3′, выполненного в раме 2, чтобы позволить горловине N упаковки C скользяще входить в формующее посадочное место 3.
Рама 2 также имеет опору 4 для катушки В ленты Е или любого другого, по существу, имеющего форму ленты, закрывающего листового элемента, имеющего подходящую жесткость и способность деформироваться.
Такой элемент может быть, по существу, плоским и изготовлен из металлического материала, такого как алюминий, или даже полимерного материала, возможно с проволочными жилами, проходящими через него, чтобы повысить его жесткость, в то же время сохраняя его способность деформироваться.
Обычно закрывающая лента Е может иметь ширину несколько миллиметров, например, от 3 мм до 10 мм.
Тем не менее, следует понимать, что материалы и размеры закрывающей ленты E указаны только для примера и без ограничения настоящего изобретения, и что в изобретении может быть использован любой имеющийся в продаже закрывающий элемент.
Рама 2 кроме того включает, по существу, горизонтальную опорную плиту 5, имеющую на ней средства 6 для подачи ленты E путем разматывания катушки В и для направления части P ленты E заданной длины I на посадочное место 7 для резки, расположенное на той же плите 5, в котором часть P ленты E, подлежащая резке, будет, по существу, вертикальной.
Подающие средства 6 предназначены для поступательного перемещения по меньшей одной концевой части с катушки B в первом заданном направлении X, по существу, параллельном верхней поверхности 8 плиты 5. Плита 5 предпочтительно, но не обязательно, является горизонтальной.
Машина 1 кроме того включает средства для резки и предварительного формования 9 для резки и предварительного формования части P ленты Е.
Средства для резки и предварительного формования 9 предназначены для работы во втором направлении Y, чтобы захватывать часть P ленты E, расположенную в посадочном месте для резки 7, вызывать ее отделение от катушки B и вводить ее в формующее посадочное место 3.
Вторые средства для формования 10 предусмотрены в формующем посадочном месте 3 и в плите 5 и приспособлены для деформации отрезанной и предварительно сформованной части Р и ее оборачивания вокруг горловины N упаковки C, чтобы закрыть ее отверстие A.
Средства 6 для подачи и направления ленты E и средства для резки 9 приводятся в действие средствами привода 11, которые установлены непосредственно на раме 2 и придают соответственные движения таким средствам.
Согласно одному признаку изобретения, средства привода 11 приводятся в действие исключительно двигателем 15 и предназначены для соединения с источником напряжения 12, схематически показанным на Фиг.2, чтобы получать отдельное напряжение.
Предпочтительно, средства привода 11 оперативно соединены с подающими средствами 6 и средствами для резки 9 посредством первого и второго передаточных средств 13 и 14, соответственно.
В предпочтительном, неисключительном варианте осуществления изобретения средства привода 11 включают электрический двигатель 15, установленный на раме 2 в любом положении и имеющий источник питания.
В частности, двигатель 15 может быть рассчитан на соединение с любым внешним источником напряжения 12, таким как электрическая сеть в помещении, в котором время от времени расположена машина 1, генератором напряжения, возможно передвижного типа, или также может получать электропитание от аккумуляторов.
При этом понимается, что тип электрического двигателя, который используется в настоящем изобретении, никоим образом не ограничен, и может быть либо общепринятым, или линейным.
В показанной конфигурации двигатель 15 имеет приводной вал, не показанный, выходной конец которого соединен с подающими средствами 6 и средствами для резки 9 посредством первого и второго передаточных средств 13, 14, соответственно.
Эти средства 13, 14 предназначены для преобразования вращательного движения приводного вала в соответственные движения подающих средств 6 и средств для резки 9.
В еще одном особо предпочтительном аспекте изобретения предусмотрена кинематическая связь 16 для соединения между собой первого передаточного средства 13 и второго передаточного средства 14 и соединения их с электрическим двигателем 15 для синхронизированного привода.
В частности, кинематическая связь 16 предназначена для осуществления скоординированного движения средств для резки 9 и подающих средств 6.
Также кинематическая связь 16 может быть предназначена для по меньшей мере частично одновременного движения подающих средств 6 и средств для резки 9.
Таким образом, поступательное движение средств для резки 9 во втором направлении Y будет происходить только по меньшей мере в последней части совокупного хода от посадочного места для резки 7 к формующему посадочному месту 3, когда подающие средства 6 уже доставили часть P в позицию для резки 7.
В показанной конфигурации средства 6 для подачи и направления включают тяговый элемент 17, который предназначен для захвата части P ленты E и транспортировки ее к позиции для резки 7.
Например, тяговый элемент 17 включает пару фрикционных дисков 18 и 19, имеющих соответственные периферические скользящие поверхности, которые предназначены для контакта с противоположными поверхностями ленты Е, чтобы способствовать ее скольжению и разматыванию с катушки В.
Эти два диска 18 и 19, которые могут иметь любое соотношение диаметров, приспособлены для вращения вокруг первых, по существу, параллельных осей вращения W, Z, соответственно, которые, по существу, вертикальные в показанной конфигурации.
В частности, первый диск 18 является ведущим диском, и другой диск 19 может быть ведомым и холостым или установленным с помощью сил трения на его оси Z. Ведущий диск 18 соединен со средствами привода 11, например, с приводным валом двигателя 15, посредством первого передаточного средства 13.
Последнее может включать первый передаточный элемент 20, взаимодействующий с приводным валом двигателя 15 посредством кинематической связи 16 и приспособленный для вращения вокруг второй оси вращения К, по существу, параллельной первым осям вращения W, Z.
Кроме того, первое передаточное средство 13 включает первый механизм 13′, например, тягу, такую как кривошипно-ползунный механизм, кулачок, коленчатый рычаг или подобный механизм, чтобы передавать вращательное движение первого передаточного элемента 20 на ведущий диск 18 и вызывать разматывание катушки B.
Средства для резки 9 могут включать удлиненный ползун 21, который предназначен для скольжения во втором направлении Y выше и параллельно верхней поверхности 8 опорной плиты 5.
Предпочтительно, первое направление X и второе направление Y, по существу, лежат под прямым углом друг к другу.
В частности, ползун 21 рассчитан на движение между первым задним, нерабочим ограничительным положением и вторым передним ограничивающим положением, в котором он взаимодействует с частью P ленты E, находящейся на позиции для резки 7, чтобы перемещать ее в позицию для формования 3.
Ползун 21 имеет, по существу, вертикальный нож 23 на его свободном конце 22 и соединен на другом конце 24 со средствами привода 11 посредством второго передаточного средства 14.
Кинематическая связь 16 может быть отрегулирована для начального отрезка хода ползуна 21 из первого ограничивающего положения до посадочного места для резки 7, который происходит одновременно с разматыванием ленты E, чем сокращается время цикла.
Второе средство передачи движения 14 может включать второй передаточный элемент 25, приспособленный для вращения вокруг третьей оси вращения R, которая может быть, для примера, по существу, параллельна второй оси вращения K.
Кроме того, оно включает второй механизм 14′ и, возможно, тягу, которая соединяет второй передаточный элемент 25 с концом 24 ползуна 21, чтобы передавать вращательное движение двигателя 15 и преобразовывать его в возвратно-поступательное движение ползуна 21 во втором направлении Y.
Передаточные элементы 20, 25 могут состоять из фрикционных дисков или зубчатых колес, или более сложных приводных систем, например конических зубчатых передач, согласно направлению, в котором проходит приводной вал двигателя 15.
Кинематическая синхронизирующая связь 16 может включать кольцевой соединительный элемент 26, такой как приводной ремень или цепь, который частично окружает периферические поверхности передаточных элементов 20, 25, чтобы вызвать их координированное движение.
В частности, один из двух передаточных элементов 20, 25, например, второй 25, может быть непосредственно соединен с приводным валом, возможно через промежуточную передачу или редукторный электродвигатель, который не показан, тогда как соединение другого передаточного элемента 25, 20 с приводным валом осуществляется через кольцевой соединительный элемент 26.
Размеры передаточных элементов 20, 25 и соединительного элемента 26, а также их относительные положения позволят координировать движения средств для резки 9 и средств для подачи 6, согласно расположениям, известным специалисту в данной области, которые здесь не будут описаны более подробно.
Как показано на Фиг.4, вторые средства формования 10 могут включать первый формующий элемент 27, расположенный в посадочном месте для резки 7 и предназначенный для придания, по существу, U-образной формы предварительно отрезанной части Р ленты Е, причем вогнутая сторона обращена к формующему посадочному месту 3.
Последнее, в свою очередь, содержит второй формующий элемент 28, имеющий, по существу, вертикальную упорную поверхность 29, поперечную второму направлению Y, с выпуклыми поперечными концами 30.
Рама 2 может включать закрывающую крышку 31, которая может быть шарнирно соединена с опорной плитой 5 или иначе размещена на ней, чтобы защищать средства для резки 9 и по меньшей мере часть средств для подачи 6, например, фрикционных дисков 18 и 19. Наоборот, формующее посадочное место 3 расположено снаружи крышки 31.
Поэтому последняя будет иметь боковое отверстие 32 для приема ленты E и переднее отверстие 33 для выталкивания ножа 23 ползунка 21 и для того, чтобы отрезанная часть P ленты E могла переместиться из посадочного места для резки 7 в формующее и закрывающее посадочное место 3.
Рама 2 также включает опорную колонку 34 для ее постоянной или съемной установки на полу помещения и для легкости ее транспортировки.
В одном конкретном варианте машина 1 также может включать штамповочную позицию 35, установленную на стороне плиты 5, которая имеет средство 36 для подачи красящего материала, такого как чернила и т.п., в переносящий элемент 37 для переноса красящего материала на закрывающую ленту E.
Переносящий элемент 37 будет поворачиваться на четвертой оси вращения между первым положением получения красящего материала во второе переносящее положение, в котором он контактирует с поверхностью закрывающей ленты E для переноса на нее текста, например, даты, или изображения.
Четвертая ось вращения, которая может быть, по существу, вертикальной, может приводиться в действие независимо от средства для подачи 6 и/или средства для резки 9.
Предпочтительно, она соединена с теми же средствами привода 11, например, тем же приводным валом общего электрического двигателя 15, через третье средство передачи движения, которое не показано, возможно соединенное с первым и вторым средствами передачи движения 13, 14 посредством кинематической связи 16.
При работе, для того, чтобы закрыть упаковку C, которая наполнена одним или несколькими продуктами, после того, как средства привода 11 будут просто соединены с источником напряжения 12, оператор должен вручную ввести горловину N упаковки S в формующее посадочное место 3.
Теперь включают средства привода 11, например, с помощью простого переключателя или другого органа управления, что заставляет приводной вал вращаться и средства для резки 9 и средства для подачи 6 двигаться синхронно.
На практике, когда часть P ленты E, которая должна быть отрезана, протягивается в первом направлении X, чтобы быть введенной в посадочное место для резки 7, ползун 21 поступательно движется во втором направлении Y, чтобы ввести нож 23 в посадочное место для резки 7 и обеспечить контакт с частью P.
Таким образом, нож 23 отрезает часть Р заданной длины I и продолжает ход, протягивая ее сначала к первому формующему элементу 27 и затем в посадочное место для закрывания 7 до тех пор, пока она не коснется упорной поверхности 29 второго формующего элемента 28.
U-образная часть Р имеет пару ответвлений, которые прижимаются к соответственным выпуклым частям 30 упорной поверхности 29, чтобы окружить горловину N упаковки C и закрыть ее. Этап штамповки, если таковой будет, может быть выполнен перед резкой.
Вышеприведенное описание четко показывает, что изобретение достигает намеченных целей и, в частности, предлагает машину для закрывания гибких упаковок, которая портативная и может быть использована в любом помещении, не требуя наличия устройства подачи сжатого воздуха, а только соединения с источником напряжения, таким как электрическая сеть в таком помещении.
В машину согласно изобретению могут быть внесены изменения и варианты в пределах идеи изобретения, раскрытой в прилагаемой формуле изобретения. Все ее детали могут быть заменены другими технически эквивалентными деталями, и материалы могут быть изменены в зависимости от разных потребностей, но без нарушения объема изобретения.
Хотя машина была описана с конкретными ссылками на прилагаемые чертежи, числа, указанные в раскрытии и формуле изобретения, использованы только для более хорошего понимания изобретения и не должны предназначаться для ограничения заявленного объема каким-либо образом.

Машина предназначена для закрывания гибких упаковок, содержащих горловину, которую закрывают полужесткой и деформируемой лентой, намотанной на катушку. Машина содержит опорную раму, прикрепленную к ней плиту, имеющую паз для помещения горловины, формующее посадочное место для ленты, расположенное на одном конце паза для позиционирования и закрывания горловины, посадочное место для отрезания части ленты, подающие средства для подачи ленты в посадочное место для резки ленты в первом направлении, средства для резки и предварительного формования для отрезания части ленты, помещенной в посадочное место для резки, вторые средства формования части ленты, приводные средства для перемещения подающих средств, средств для резки и предварительного формования. При этом приводные средства приводятся в действие исключительно электрическим двигателем. Средства для резки включают удлиненный ползун, перемещаемый по плите во втором направлении, по существу, перпендикулярном первому направлению, причем ползун имеет свободный конец с вертикальным ножом, предназначенный для контакта и отрезания ленты в посадочном месте для резки, а вторые средства формования содержат первый формующий элемент, расположенный в посадочном месте для резки и придающий упомянутой части ленты предварительную, по существу, U-образную форму с вогнутой стороной, обращенной к формующему посадочному месту, и второй формующий элемент, расположенный в формующем посадочном месте и имеющий, по существу, вертикальную упорную поверхность, поперечную второму направлению с выпуклыми поперечными концами. Причем приводные средства соединены с ползуном для перемещения его во втором направлении для отрезания ленты и его перемещение для подачи части ленты к первому формующему элементу для придания ей U-образной формы с помощью пары ответвлений на формующем посадочном месте и для последующей подачи ее на упорную поверхность второго формующего элемента, чтобы ответвления окружили горловину упаковки и закрыли ее. Изобретение обеспечивает упрощение, снижение себестоимости и компактность. 8 з.п. ф-лы, 6 ил.
1. Машина для закрывания гибких упаковок, причем каждая упаковка (C) включает отверстие (А) для вынимания продуктов, находящихся в ней, и горловину (N) рядом с отверстием (А), которая должна быть закрыта полужесткой и деформируемой закрывающей лентой (E), намотанной на катушку (В), и причем машина включает опорную раму (2), плиту (5), прикрепленную к упомянутой раме (2) и имеющую паз (3′) для помещения туда горловины (N) упаковки (C) раз за разом, формующее посадочное место (3) закрывающей ленты (E), расположенное на одном конце упомянутого паза (3′) для позиционирования и закрывания горловины (N) упаковки (S), посадочное место (7) для отрезания части (P) закрывающей ленты (E), имеющей заданные длины (I), подающие средства (6) для подачи ленты (E) в упомянутое посадочное место для резки (7) в первом направлении (X), средства для резки и предварительного формования (9) для отрезания части (P) ленты (E), помещенной в упомянутое посадочное место для резки (7), вторые средства формования (10) для формования отрезанной части (P) ленты (E), приводные средства (11) для перемещения упомянутых подающих средств (6) и упомянутых средств для резки и предварительного формования (9), отличающаяся тем, что упомянутые приводные средства (11) приводятся в действие исключительно электрическим двигателем (15), причем упомянутые средства для резки (9) включают удлиненный ползун (21), перемещаемый по упомянутой плите (5) во втором направлении (Y), по существу перпендикулярном упомянутому первому направлению (X), причем упомянутый ползун (21) имеет свободный конец (22) с по существу вертикальным ножом (23), который предназначен для контакта и отрезания части (P) ленты (E) заданной длины (I) в посадочном месте для резки (7), и причем упомянутые вторые средства формования (10) включают первый формующий элемент (27), расположенный в упомянутом посадочном месте для резки (7) и придающий упомянутой части (P) заданной длины (I) предварительную, по существу U-образную форму с вогнутой стороной, обращенной к упомянутому формующему посадочному месту (3), и второй формующий элемент (28), расположенный в упомянутом формующем посадочном месте (3) и имеющий по существу вертикальную упорную поверхность (29), поперечную упомянутому второму направлению (Y) с выпуклыми поперечными концами (30), и причем упомянутые приводные средства (11) соединены с упомянутым ползуном (21), чтобы перемещать его в упомянутом втором направлении (Y) для первоначального отрезания упомянутой части (P) упомянутым ножом (23) и продолжать перемещение упомянутого ползуна (21), чтобы подать упомянутую часть (P) к упомянутому первому формующему элементу (27) для придания упомянутой части (P) U-образной формы с помощью пары ответвлений на упомянутом формующем посадочном месте (3) и для последующей подачи ее на упомянутую упорную поверхность (29) упомянутого второго формующего элемента (28), чтобы упомянутые ответвления окружили горловину (N) упаковки (C) и закрыли ее.
2. Машина по п.1, отличающаяся тем, что упомянутый электрический двигатель (15) установлен на упомянутой раме (2).
3. Машина по п.1, отличающаяся тем, что упомянутые приводные средства (11) включают первое и второе средства (13, 14) передачи движения, предназначенные для соединения упомянутого двигателя, соответственно, с упомянутыми подающими средствами (6) и с упомянутыми средствами для резки (9) и упомянутыми вторыми средствами формования (10), причем упомянутые первое и второе средства (13, 14) передачи движения синхронизированы кинематической связью (16).
4. Машина по п.3, отличающаяся тем, что упомянутые подающие средства (6) включают тяговый элемент (17), предназначенный для взаимодействия с закрывающей лентой (E), чтобы поступательно перемещать ее в упомянутом первом направлении (X) и подавать часть (P) для отрезания в упомянутое посадочное место для резки (7).
5. Машина по п.4, отличающаяся тем, что упомянутый тяговый элемент (17) включает по меньшей мере один первый фрикционный диск (18), вращающийся вокруг первой оси вращения (W) и имеющий периферическую наружную поверхность, предназначенную для контакта с лицевой поверхностью закрывающей ленты (E), причем упомянутый первый фрикционный диск (18) механически связан с упомянутым первым средством передачи движения (13).
6. Машина по п.5, отличающаяся тем, что упомянутое первое средство (13) для передачи движения включает первый передаточный элемент (20), взаимодействующий с упомянутым двигателем (15) и вращающийся вокруг второй оси вращения (К), и первую шарнирную кинематическую связь (13′), предназначенную для соединения упомянутого первого передаточного элемента (20) с упомянутым первым фрикционным диском (18) и для передачи ему движения упомянутого двигателя (15).
7. Машина по п.3, отличающаяся тем, что упомянутый ползун (21) может перемещаться между задним конечным положением и передним конечным положением, в котором он взаимодействует с частью (P) ленты (E), причем упомянутый ползун (21) имеет противоположный конец (24), прикрепленный к упомянутому второму средству (14) для передачи движения, чтобы получать движение от упомянутых приводных средств (11).
8. Машина по п.7, отличающаяся тем, что упомянутое второе средство (14) для передачи движения включает второй передаточный элемент (25), вращающийся вокруг третьей оси вращения (R) и взаимодействующий с упомянутым двигателем (15), и вторую шарнирную кинематическую связь (14′), предназначенную для соединения упомянутого второго передаточного элемента (25) с упомянутым ползуном (21) для передачи ему движения упомянутого двигателя (15).
9. Машина по п.8, отличающаяся тем, что упомянутая кинематическая связь (16) включает по меньшей мере один кольцевой соединительный элемент (26), оперативно соединенный с упомянутым первым и упомянутым вторым передаточными элементами (20, 25).
| US 1493075 A, 06.05.1924 | |||
| СПОСОБ ПОЛУЧЕНИЯ ЛЕКАРСТВЕННОЙ ФОРМЫ ПРОТИВООПУХОЛЕВОГО АНТИБИОТИКА | 1995 |
|
RU2105569C1 |
| RU 98100485 A, 10.12.1999. | |||

