Предлагаемое изобретение относится к области воздухоплавательных аппаратов, в частности к беспилотным летательным аппаратам (БПЛА).
Известен воздухоплавательный аппарат (дирижабль), содержащий ферму, сигарообразную оболочку, заполненную газом легче воздуха, стабилизатор, элементы крепления оболочки к ферме, движители в виде воздушных винтов, кабину для экипажа и груза [2].
Известно также изобретение [3], в котором технический результат достигается тем, что в воздухоплавательный аппарат, содержащий ферму, сигарообразную оболочку, заполненную газом легче воздуха, стабилизатор, элементы крепления оболочки к ферме, движители в виде воздушных винтов, кабину для экипажа и груза, причальные приспособления. Воздухоплавательный аппарат состоит из трех горизонтально расположенных оболочек (центральная имеет стабилизатор), соединенных снизу общей фермой, причем между оболочками расположены и прикреплены к ферме О-образные части с установленными в них на поперечных поворотных осях движителями.
За базовый вариант летательного устройства можно принять любой из беспилотников (БПЛА), квадрокоптеров или дронов, дополнив его элементами, обладающими новизной. Конструкций дронов в России и мире множество, как военного, так и гражданского предназначения [3, 4, 5]. Мини-БПЛА стремительно обретают популярность в гражданской сфере, где большие БПЛА аэродромного базирования традиционно были недоступны как финансово, так и юридически. За рубежом мини-БПЛА используются для охраны сельхозугодий, картографии, дистанционного химико-физического анализа, контроля всхожести и спелости урожая, химической обработки. Примером этому служат японские БПЛА-вертолеты для фермеров Yamaha RMAX. В России подобная практика только-только начинает внедряться отдельными организациями [6].
В 2012 году компания Parrot завоевала рынок удачным и довольно доступным квадрокоптером AR.Drone, а недавно представила новую модель под названием Bebop Drone (AR.Drone 3.0). Она также предназначена для любительского пилотирования и аэрофотосъемки. Аппарат уже оборудован HD-камерой с продвинутой системой стабилизации и 180-градусным объективом. Также есть и встроенный модуль GPS. Управление может осуществляться со смартфона или планшета через WiFi. Кроме того, в качестве опции доступен дополнительный пульт с удобными органами управления и дальнобойной антенной. Гарнитура виртуальной реальности Oculus Rift также имеет штатную поддержку. Недостатком новинки является слабый аккумулятор на 1200 мА*ч. Его хватит всего на 12 минут полета. Для повышения грузоподъемности квадрокоптера большинство его элементов выполняется из легких углепластов, а крыло заполняется гелием. Желательно, чтобы квадрокоптер длительное время парил в воздухе без включения движителей.
В основе любого автоматического управления лежит простая последовательность: измерение, сравнение и парирование возмущающего воздействия. Как правило, в современном профессиональном бортовом комплексе навигации и управления функцию измерения состояния системы выполняет малогабаритная инерциальная интегрированная система (МИНС) [7, 8].
Имея в своем составе триады инерциальных датчиков (микромеханических гироскопов и акселерометоров), а также барометрический высотомер и трехосный магнитометр и комплексируя данные этих датчиков с данными приемника GPS, система вырабатывает полное навигационное решение по координатам и углам ориентации.
Типовая структурная схема автопилота включает: магнитный компас, барометрический датчик скорости, барометрический датчик высоты, ультразвуковой датчик высоты (для взлетов посадок), систему спутниковой навигации, гировертикаль, пиродатчик горизонта, исполнительные механизмы
Для обеспечения поставленных задач, а также определения координат исследуемых участков местности АСУ квадрокоптера должна содержать в своем составе: Устройства получения видовой информации, Спутниковую навигационную систему, Устройства радиолинии видовой и телеметрической информации, Устройства командно-навигационной радиолинии с антенно-фидерным устройством, Устройство обмена командной информацией, Устройство информационного обмена, Бортовую цифровую вычислительная машину (БЦВМ), Устройство хранения видовой информации. Для обеспечения связи на значительные расстояния и повышения помехозащищенности за счет пространственной селекции в комплексах управления БПЛА широко используются остронаправленные антенные системы (АС) как на ПУ, так и на БЛА. Система управления остронаправленной АС включает в себя: Собственно остронаправленную АС, радиотехнические параметры которой выбираются, исходя из требований обеспечения необходимой дальности связи по радиолинии, Сервопривод АС, обеспечивающий пространственную ориентацию ДН АС в направлении ожидаемого появления излучения объекта связи, Систему автоматического сопровождения по направлению (АСН), обеспечивающую устойчивое автосопровождение объекта связи в зоне уверенного захвата пеленгационной характеристики системы АСН, Радиоприемное устройство, обеспечивающее формирование сигнала «Связь», свидетельствующего о приеме информации с заданным качеством, Систему управления антенной системой, обеспечивающую анализ текущего состояния системы управления АС, формирование сигналов управления сервоприводом для обеспечения пространственной ориентации АС в соответствии с полетным заданием и алгоритмом пространственного сканирования. Таким образом, наиболее важной составляющей беспилотного авиационного комплекса является система управления и связи.
В настоящее время беспилотники выполняют научные задачи или используются в разведывательных целях. Полезную нагрузку, кроме управляющей и наблюдательной аппаратуры, они не несут.
Целью предлагаемого изобретения является создание воздухоплавательного аппарата, способного хорошо ориентироваться в пространстве, наблюдать ситуацию по маршруту движения и нести значительный полезный груз.
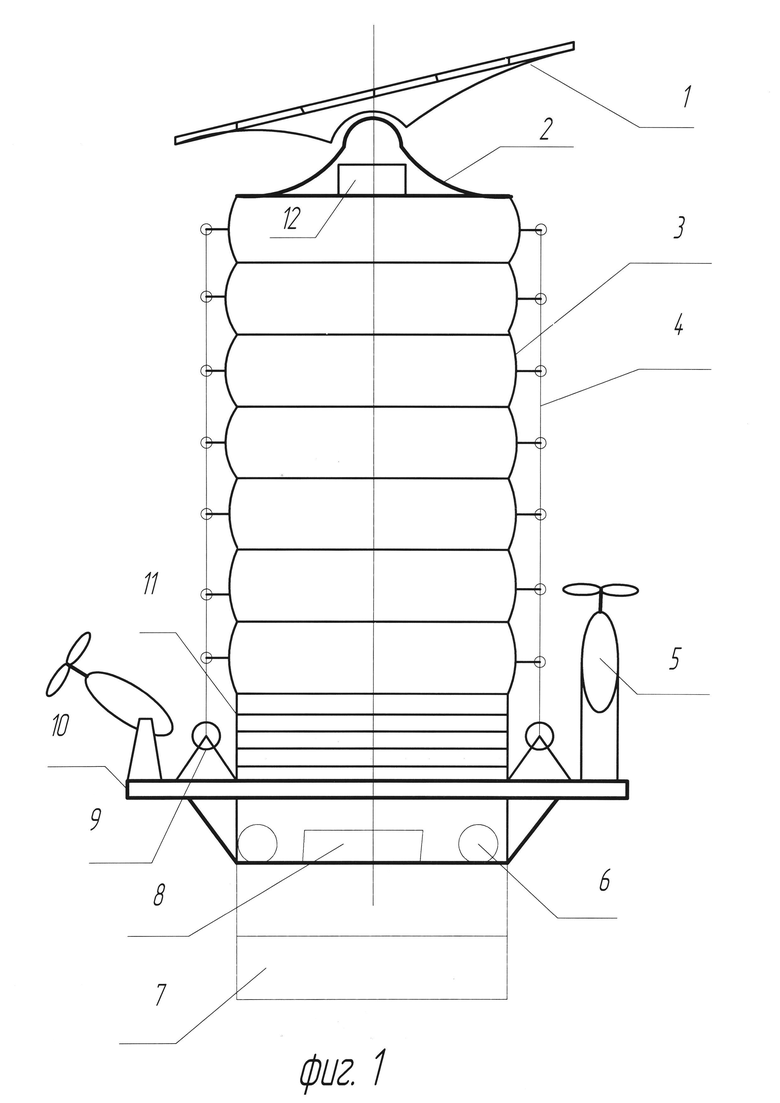
На фиг. 1 представлен вид на воздухоплавательный аппарат сбоку с разрезом,
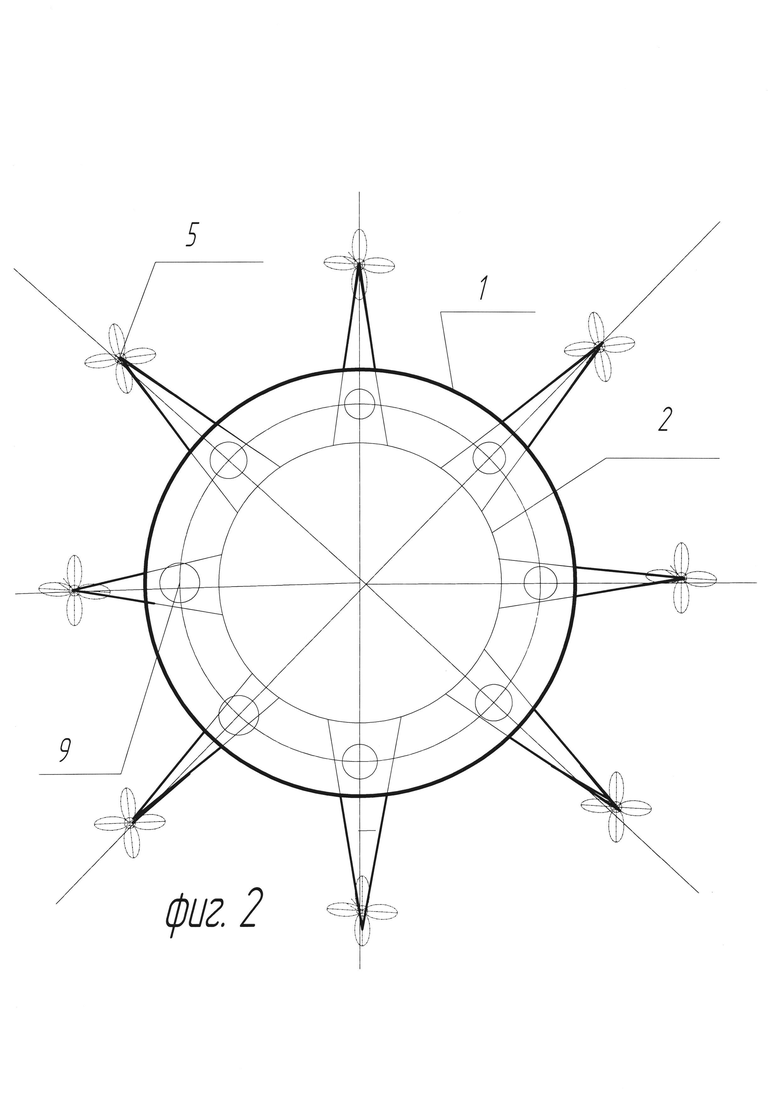
на фиг. 2 - тот же аппарат с видом сверху.
Воздухоплавательный аппарат состоит:
1 - панель солнечной батареи, 2 - крышка пневмотрубы, 3 - секция пневмотрубы, 4 - трос, 5 - электродвижитель с изменяемым вектором тяги, 6 - пневмобалон с компрессором, 7 - груз, 8 - автоматическая система управления (АСУ), 9 - автоматическое натяжное устройство, 10 - несущая ферма октаоптера, 11 - резервные секции пневмотрубы, 12 - аккумуляторы электроэнергии.
За основу принят октакоптер с восемью электродвижителями с изменяемым вектором тяги.
Воздухоплавательный аппарат включает восьмиугольную ферму с электродвижителями по концам, системы наблюдения, ориентации, связи и автоматического управления. Основным отличием является то, что в центре восьмиугольной фермы расположена пневматическая полимерная труба, состоящая из герметично изолированный секций, армированных полимерными обручами и скрепленных между собой замковыми соединениями, поддерживаемая в вертикальном положении с помощью автоматических натяжных устройств, при заполнении легким газом полимерная труба создает подъемную силу, компенсирующую вес груза, подвешиваемого к ферме.
Пневматическая труба закрывается крышкой, под которой находятся аккумуляторы.
Другим отличием является то, что рабочий газ не стравливается в атмосферу при посадке аппарата, а компрессором закачивается в баллоны высокого давления, причем баллоны с компрессором находятся на восьмиугольной ферме аппарата. Циркуляция газа по круговой системе позволяется аппарату работать длительное время без дозаправки газа. Над крышкой расположена панель солнечной батареи, способной поворачиваться вслед за солнцем. В качестве заполнителя пневматической трубы используется газ гелий. Так как подъемная сила газа пневматической трубы должна компенсировать вес полезного груза, подвешиваемого к несущей ферме октакоптера, то мощность движителей в основном используется для перемещения воздухоплавательного аппарата и может быть не столь значительна. При попутном ветре не все движители могут быть задействованы и некоторые движители могут работать как ветряки, - в режиме генератора энергии. В том же режиме их можно использовать при наземном положении октакоптера, при загрузочно-разгрузочных работах. При этом движитель автоматически разворачивается навстречу ветра.
Данный беспилотник должен иметь систему видеонаблюдения, радар, систему ориентации и сопровождения по «Гланас», систему связи, систему автоматического управления, а также громоотводную систему. Солнечная панель направляется по ходу солнца сервоприводами.
Программное приложение позволяет просматривать пройденный маршрут по GPS-координатам и корректировать дальнейшую работу воздухоплавательного аппарата. Управление октакоптером и работой всех устройств осуществляет блок АСУ, а также оператор со смартфона или планшета (не исключено и специальное электронное устройство управления).
Объем газовой трубы не ограничен ни по высоте, ни по диаметру, а это значит, что и перевозимый груз может быть значительным. Секции пневматической трубы армированы полимерными обручами и стыкаются с помощью замковых устройств. Заполненные газом секции должны уравновешивать подвешиваемый груз. Если нарушается герметичность одной из секций, то газом заполняется резервная секция из баллона сжатого газа.
Большинство элементов предлагаемого устройства выполняются из легких углепластов, например пластик ABS или волокна КЛЕВЛАР, которые прочнее стали, но легче ее.
На основе углеродных волокон и углеродной матрицы создают композиционные углеграфитовые материалы, способные долго выдерживать в инертных или восстановительных средах температуры до 3000 град. Углепластики очень легки и в то же время прочные материалы [9]. Например, полимер этого класса, названный «Хайпол», обладает следующими параметрами: рабочая температура до 2000 град., химическая инертность к окислительным средам, не горит, в 1.5 раза легче алюминия и весьма прочен [10]. Вызывает интерес последняя разработка российских ученых - полимер ГРАФИН, обладающий особенными и экзотическими свойствами [11]. За эту разработку российские ученые получили Нобелевскую премию в 2010 году.
Углеграфитовые трубки могут достигать прочность, в 50 раз превышающую прочность стали.
Углеродные тонкие пленки, полученные из этих полимеров, могут быть использованы в качестве стенок пневматической трубы.
При посадке аппарата используются движители. Если этого недостаточно, то газ из некоторых секций пневматической трубы перекачивается компрессором в баллоны сжатого газа. При экстренной посадке газ из пневматических секций выпускается в атмосферу. Предлагаемому беспилотнику не нужны аэродромы как самолету, не нужны базы дозаправки горючим как вертолету, не нужны дороги как фурам. Трудно придумать отказ оборудования, в результате чего груз мог бы быть не доставлен по назначению.
Воздухоплавательный аппарат предназначен для перевозки больших грузов в местах, где нет дорог, посадочных площадок, при плохой видимости, там где работа традиционных видов транспорта затруднена или невозможна: в условиях тайги, тундры и Крайнего Севера. Воздухоплавательный аппарат может быть использован и в степях Казахстана и пустыни Средней Азии и Монголии.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Современные системы очистки газовых выбросов. www.coolreferat.com.
2. Патент РФ 2420425.
3. bp-la.ru/primenenie-bespilotnyx-letatelnyx-apparatov/.
4. А. Каримов, В. Ильин. «Военное обозрение», #46(268), 2013.
5. 24gadget.ru/tags/дрон.
6. Н.С. Сенюшкин. Особенности классификации БПЛА самолетного типа. «Молодой ученый», - 2010, - №11, - с. 65-68.
7. А. Поскутников. Системы автоматического управления БПЛА. «Молодой ученый», - 2011, - №9, - с. 56-58.
8. В. Слосар. Радиолинии связи с БПЛА: Примеры реализации. Электроника: наука, технология, бизнес. - 2010, - №5. - с. 56050.
9. Конкин А.А. Углеродные и другие жаростойкие волокнисты материалы. М.: Высшая школа, 2004.
10. http: http://highpol.com.
11. http: newchemistry.ru.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2659147C1 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2642210C1 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2643306C1 |
| Воздухоплавательный аппарат | 2017 |
|
RU2652322C1 |
| Воздухоплавательный аппарат | 2017 |
|
RU2652373C1 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ ЭЛЕКТРОПОЕЗД | 2017 |
|
RU2734559C2 |
| ВОЗДУШНОЕ ТАКСИ | 2015 |
|
RU2609660C1 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ ДЛЯ ОЧИСТКИ ВОЗДУХА ГОРОДОВ ОТ ГАЗОВ И ПЫЛИ | 2015 |
|
RU2577606C1 |
| СПАСАТЕЛЬНЫЙ ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2752038C2 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ ДЛЯ ОЧИСТКИ ВОЗДУХА ГОРОДОВ ОТ ГАЗОВ И ПЫЛИ | 2015 |
|
RU2609594C1 |
Изобретение относится к области воздухоплавательных аппаратов. Воздухоплавательный аппарат включает восьмиугольную ферму с электродвижителями по концам, системы наблюдения, ориентации, связи и автоматического управления. В центре восьмиугольной фермы расположена пневматическая полимерная труба, состоящая из герметично изолированных секций, армированных полимерными обручами и скрепленных между собой замковыми соединениями, поддерживаемая в вертикальном положении с помощью автоматических натяжных устройств. При заполнении легким газом полимерная труба создает подъемную силу, компенсирующую вес груза, подвешиваемого к ферме. Изобретение направлено на создание летательного аппарата, хорошо ориентирующегося в пространстве. 1 з.п. ф-лы, 2 ил.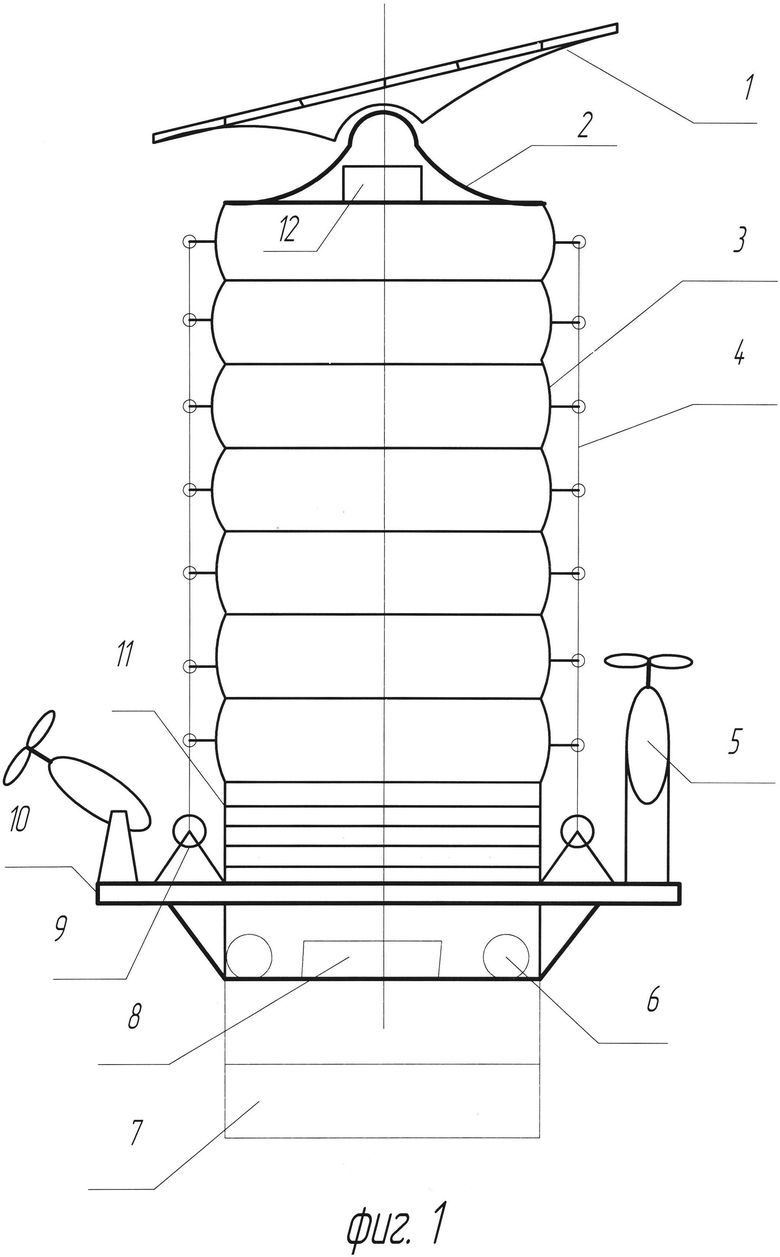
1. Воздухоплавательный аппарат, включающий восьмиугольную ферму с электродвижителями по концах, системы наблюдения, ориентации, связи и автоматического управления, отличающийся тем, что в центре восьмиугольной фермы расположена пневматическая полимерная труба, состоящая из герметично изолированных секций, армированных полимерными обручами и скрепленных между собой замковыми соединениями, поддерживаемая в вертикальном положении с помощью автоматических натяжных устройств, при заполнении легким газом полимерная труба создает подъемную силу, компенсирующую вес груза, подвешиваемого к ферме.
2. Воздухоплавательный аппарат по п. 1, отличающийся тем, что рабочий газ не стравливается в атмосферу при посадке аппарата, а компрессором закачивается в баллоны высокого давления, причем баллоны с компрессором находятся на восьмиугольной ферме аппарата.
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2420425C1 |
| БЕЗБАЛЛАСТНЫЙ ДИРИЖАБЛЬ | 1999 |
|
RU2174482C2 |
| БЕСПИЛОТНЫЙ КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2485018C1 |
| JP 2005271831 A, 06.10.2005. | |||

