В России интерес к воздухоплавательным аппаратам особый: стоит задача активного обживания просторов Сибири, Дальнего Востока, Крайнего Севера и земель и водных пространств Арктики. Транссибирская железнодорожная магистраль только на юге Сибири, чуть севернее - ничем не доберешься: советская система воздушного транспорта разрушена, машиной не проедешь, лошади давно нет… Воздухоплавательные аппараты, не требующие аэродром, могут способствовать решению данной проблемы.
Предлагаемое изобретение относится к области воздухоплавательных аппаратов, в частности к беспилотным летательным аппаратам (БПЛА). Известен воздухоплавательный аппарат (дирижабль), содержащий ферму, сигарообразную оболочку, заполненную газом легче воздуха, стабилизатор, элементы крепления оболочки к ферме, движители в виде воздушных винтов, кабину для экипажа и груза [2].
Известно также изобретение [3], в котором технический результат достигается тем, что воздухоплавательный аппарат содержит ферму, сигарообразную оболочку, заполненную газом легче воздуха, стабилизатор, элементы крепления оболочки к ферме, движители в виде воздушных винтов, кабину для экипажа и груза, причальные приспособления. Воздухоплавательный аппарат состоит из трех горизонтально расположенных оболочек (центральная имеет стабилизатор), соединенных снизу общей фермой, причем между оболочками расположены и прикреплены к ферме О-образные части, с установленными в них на поперечных поворотных осях движителями.
За базовый вариант летательного устройства можно принять любой из беспилотников (БПЛА), квадрокоптеров или дронов, дополнив его элементами, обладающими новизной. Конструкций дронов в России и мире множество, как военного, так и гражданского предназначения [3, 4, 5]. Мини-БПЛА стремительно обретают популярность в гражданской сфере, где большие БПЛА аэродромного базирования традиционно были недоступны как финансово, так и юридически. За рубежом мини-БПЛА используются для охраны сельхозугодий, картографии, дистанционного химико-физического анализа, контроля всхожести и спелости урожая, химической обработки. Примером этому служат японские БПЛА-вертолеты для фермеров Yamaha RMAX. В России подобная практика только-только начинает внедряться отдельными организациями [6].
В 2012 году компания Parrot завоевала рынок удачным и довольно доступным квадрокоптером AR. Drone, а недавно представила новую модель под названием Bebop Drone (AR. Drone 3.0). Она также предназначена для любительского пилотирования и аэрофотосъемки. Аппарат уже оборудован HD-камерой с продвинутой системой стабилизации и 180-градусным объективом. Также есть и встроенный модуль GPS. Управление может осуществляться со смартфона или планшета через WiFi. Кроме того, в качестве опции доступен дополнительный пульт с удобными органами управления и дальнобойной антенной. Гарнитура виртуальной реальности Oculus Rift также имеет штатную поддержку. Недостатком новинки является слабый аккумулятор на 1200 мА⋅ч. Его хватит всего на 12 минут полета. Для повышения грузоподъемности квадрокоптера большинство его элементов выполняется из легких углепластов, а крыло заполняется гелием. Желательно, чтобы квадрокоптер длительное время парил в воздухе без включения движителей.
В основе любого автоматического управления лежит простая последовательность: измерение, сравнение и парирование возмущающего воздействия. Как правило, в современном профессиональном бортовом комплексе навигации и управления функцию измерения состояния системы выполняет малогабаритная инерциальная интегрированная система (МИНС) [7, 8].
Имея в своем составе триады инерциальных датчиков (микромеханических гироскопов и акселерометоров), а также барометрический высотомер и трехосный магнитометр и комплексируя данные этих датчиков с данными приемника GPS, система вырабатывает полное навигационное решение по координатам и углам ориентации.
Типовая структурная схема автопилота включает: магнитный компас, барометрический датчик скорости, барометрический датчик высоты, ультразвуковой датчик высоты (для взлетов посадок), система спутниковой навигации, гировертикаль, пиродатчик горизонта, исполнительные механизмы и радарные устройства, отслеживающие воздушную ситуацию по пути следования.
Для обеспечения поставленных задач, а также определения координат исследуемых участков местности АСУ мультикоптера должна содержать в своем составе: Устройства получения видовой информации, Спутниковую навигационную систему, Устройства радиолинии видовой и телеметрической информации, Устройства командно-навигационной радиолинии с антенно-фидерным устройством, Устройство обмена командной информацией, Устройство информационного обмена, Бортовую цифровую вычислительную машину (БЦВМ), Устройство хранения видовой информации. Для обеспечения связи на значительные расстояния и повышения помехозащищенности за счет пространственной селекции в комплексах управления БПЛА широко используются остронаправленные антенные системы (АС) как на ПУ, так и на БЛА. Система управления остронаправленной АС включает в себя: Собственно остронаправленную АС, радиотехнические параметры которой выбираются, исходя из требований обеспечения необходимой дальности связи по радиолинии, Сервопривод АС, обеспечивающий пространственную ориентацию ДН АС в направлении ожидаемого появления излучения объекта связи, Систему автоматического сопровождения по направлению (АСН), обеспечивающую устойчивое автосопровождение объекта связи в зоне уверенного захвата пеленгационной характеристики системы АСН, Радиоприемное устройство, обеспечивающее формирование сигнала «Связь», свидетельствующего о приеме информации с заданным качеством, Систему управления антенной системой, обеспечивающую анализ текущего состояния системы управления АС, формирование сигналов управления сервоприводом для обеспечения пространственной ориентации АС в соответствии с полетным заданием и алгоритмом пространственного сканирования. Таким образом, наиболее важной составляющей беспилотного авиационного комплекса является система управления и связи.
В настоящее время беспилотники выполняют научные задачи или используются в разведывательных целях. Полезную нагрузку кроме управляющей и наблюдательной аппаратуры они не несут.
Известно изобретение (http://www.findpatent.ru/patent/258/2581971.html © FindPatent.ru - патентный поиск, 2012-2016), которое относится к области воздухоплавательных аппаратов. Воздухоплавательный аппарат включает восьмиугольную ферму с электродвижителями по концам, системы наблюдения, ориентации, связи и автоматического управления. В центре восьмиугольной фермы расположена пневматическая полимерная труба, состоящая из герметично изолированных секций, армированных полимерными обручами и скрепленных между собой замковыми соединениями, поддерживаемая в вертикальном положении с помощью автоматических натяжных устройств. При заполнении легким газом полимерная труба создает подъемную силу, компенсирующую вес груза, подвешиваемого к ферме. Изобретение направлено на создание летательного аппарата, хорошо ориентирующегося в пространстве; принято в качестве прототипа.
Недостатком данного изобретения можно назвать следующее:
«Мягкая» оболочка секций полимерной трубы и большое лобовое сопротивление ветру уменьшают возможности воздухоплавательного аппарата для вертикального маневра.
Аппарат в соответствии с физическими принципами должен иметь форму, близкую к форме эллипсоида (дискообразную или сигарообразную), причем сигарообразная форма целесообразна в основном для аппарата очень большой грузоподъемности, а дискообразная - для аппарата с высокой маневренностью. Условия Крайнего Севера России, когда лето длится 1.5-2 месяца, требуют быстрой доставки груза, поэтому воздухоплавательный аппарат должен обладать большой грузоподъемностью и высокой скоростью.
Целью предлагаемого изобретения является создание воздухоплавательного аппарата обладающего высокой маневренностью, устойчивостью к боковому давлению ветров и способного нести значительный полезный груз с высокой скоростью.
Предлагается конструкция гибридного воздухоплавательного аппарата.
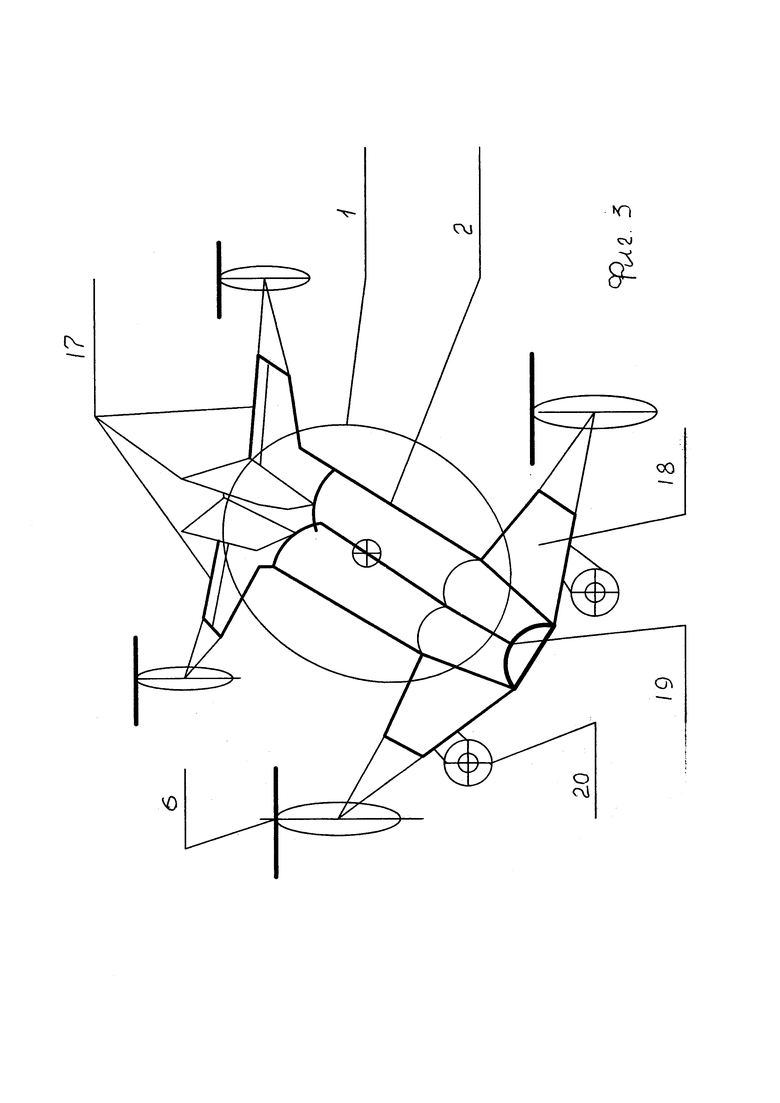
На фиг. 1 представлен вид на воздухоплавательный аппарат сбоку с разрезом, на фиг. 2 - тот же аппарат с видом спереди (фас) с разрезом, на фиг. 3 - вид сверху в аксонометрии.
Воздухоплавательный аппарат состоит:
1 - панель солнечной батареи, 2 - гондола, 3 - топливный бак, 4 - несущая ферма с консолью 5, 6 - электродвижитель с изменяемым вектором тяги, 7 - газовая подушка, 8 - шасси с захватами 9 и пневмоамортизатором 10, 11 - груз, 12 - пневмодомкрат, 13 - сильфон газовой камеры изменяемого давления, 14 - газовая камера постоянного объема, 16 - газовый баллон высокого давления, 17 - устройства стабилизации, 18 - монокрыло, 19 оптекатель, 20 - турбовинтовой двигатель.
Предполагается, что мультикоптер будет использован в основном при подъеме и посадке воздухоплавательного аппарата, при полете в режиме автопилота включаются два маршевых турбовинтовых двигателя и доводят скорость полета до максимально возможного уровня, при этом некоторые электродвижители должны быть использованы для стабилизации груза в пространстве, а другие могут быть использованы как ветряки для накопления электроэнергии.
За основу принят мультикоптер с четырьмя электродвижителями с изменяемым вектором тяги. Корпус солнечной батареи выполнен в виде эллипсоида и заполнен газом, может поворачиваться к солнцу.
В качестве рабочего газа принят гелий. Корпуса всех устройств выполняются из ультралегкого и прочного кевлара. Эластичные секции газовых камер выполняются из высокопрочной резины или эластомеров, т.е. природных или синтетических каучуков. Каучук обладает способностью обратимо растягиваться до 900%.
Вес полезного груза значительно компенсируется подъемной силой емкостями с гелием: газовой подушкой, газовыми камерами и корпусом солнечной батареи, заполненной газом, а также динамической подъемной силой монокрыла.
Маневренность воздухоплавательного аппарата улучшается за счет изменения объема газовых камер путем их сжимания пневмодомратами и конечно тягой электродвижителей и турбодвигателей, а также системой стабилизации аппарата, состоящей из рулей, элеронов и закрылок, в значительной мере свободных от поднятия грузов.
Устойчивость к боковому давлению ветров повышается путем улучшения аэродинамической формы аппарата, жесткого корпуса гондол и уменьшения высоты газовых камер.
Воздушная подушка, расположенная под несущей рамой мультикоптера, при «жесткой посадке» может служить амортизирующим элементом и защитить дорогостоящую аппаратуру автоматического управления от поломки.
Для повышения сохранности дорогого и текучего гелия, все корпуса газовых емкостей изнутри покрыты эластичной пленкой, нанесенной путем напыления.
Основным отличием воздухоплавательного аппарата, который включает мультикоптер с четырьмя электродвижителями и двумя турбодвигателями, несущую ферму, газовые камеры, панель солнечной батареи, системы наблюдения, ориентации, связи и автоматического управления, является то, что аппарат выполнен в жестком аэродинамическом корпусе эллипсоидной формы и состоит из несущей фермы с консолями, по концам которых подвешены четыре электродвижителя с изменяемым вектором тяги, на ферме находятся две гондолы, состоящие из жестких корпусов и газовых камер с постоянным и переменным объемом, под несущей фермой находится газовая подушка, а в передней части несущей фермы находится монокрыло, снизу которой подвешены два турбовинтовых двигателя, в задней части несущей фермы расположены устройства стабилизации, состоящие из рулей, элеронов и закрылок, связанных посредством автоматизированной системы управления с элементами изменения объема газовых камер, что повышает устойчивость и управляемость аппарата в целом.
Другим отличием воздухоплавательного аппарата, включающего две гондолы с газовыми камерами постоянного и переменного объема, является то, что корпуса газовых камер переменного объема представляют собой сильфоны из жесткого металла или полимера, которые способны сжиматься и растягиваться под действием пневмодомкратов.
При попутном ветре не все движители могут быть задействованы и некоторые движители могут работать как ветряки - в режиме генератора энергии. В том же режиме их можно использовать при наземном положении мультикоптера при загрузочно-разгрузочных работах. При этом движитель автоматически разворачивается навстречу ветру. Данный беспилотник должен иметь систему видионаблюдения, радар, систему ориентации и сопровождения по «Глонасс», систему связи, систему автоматического управления, а также громоотводную систему. Солнечная панель направляется по ходу солнца сервоприводами. Программное приложение позволяет просматривать пройденный маршрут по GPS-координатам и корректировать дальнейшую работу воздухоплавательного аппарата. Управление мультикоптером и работой всех устройств осуществляет блок АСУ, а так же оператор со смартфона или планшета (не исключено и специальное электронное устройство управления).
Объемы газовых камер не ограничены ни по высоте, ни по диаметру, их количество тоже не ограничено, а это значит, что и перевозимый груз может быть значительным. Большинство элементов предлагаемого устройства выполняются из легких углепластиков, например пластик ABS или волокна КЛЕВЛАР, которые прочнее стали, но легче ее.
На основе углеродных волокон и углеродной матрицы создают композиционные углеграфитовые материалы, способные долго выдерживать в инертных или восстановительных средах температуры до 3000 град. Углепластики очень легки и в то же время прочные материалы [9]. Например, полимер этого класса, названный «Хайпол», обладает следующими параметрами: рабочая температура до 2000 град, химическая инертность к окислительным средам, не горит, в 1.5 раза легче алюминия и весьма прочен [10]. Вызывает интерес последняя разработка российских ученых - полимер ГРАФИН, обладающий особенными и экзотическими свойствами [11]. За эту разработку российские ученые получили Нобелевскую премию в 2010 году. Углеграфитовые трубки могут достигать прочность, в 50 раз превышающую прочность стали.
Углеродные тонкие пленки, нанесенные путем напыления на стенки корпусов газовых камер изнутри, предохраняют от утечки газа.
При посадке аппарата используются все средства маневрирования воздухоплавательного аппарата: поворот движителей и изменение вектора тяги, изменение объема несущих газовых камер. При экстренной посадке газ из несущих газовых камер выпускается в атмосферу, а газовая подушка служит амортизирующим элементом.
Предлагаемому беспилотнику не нужны аэродромы, как самолету, не нужны базы дозаправки горючим, как вертолету, не нужны дороги, как фурам. Трудно придумать отказ оборудования, в результате чего груз мог бы быть не доставлен по назначению.
Воздухоплавательный аппарат предназначен для перевозки больших грузов в местах, где нет дорог, посадочных площадок, при плохой видимости, там, где работа традиционных видов транспорта затруднена или невозможна: в условиях тайги, тундры и Крайнего Севера. Воздухоплавательный аппарат может быть использован и в степях Казахстана, и пустыни Средней Азии и Монголии.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Современные системы очистки газовых выбросов, www.coolreferat.com.
2. Патент РФ 2420425.
3 - bp-la.ru/primenenie-bespilotnyx-letatelnyx-apparatov/
4. А. Каримов, В. Ильин. «Военное обозрение», #46 (268), 2013.
5. 24gadget.ru/tags/дрон.
6. Н.С. Сенюшкин. Особенности классификации БПЛА самолетного типа. «Молодой ученый», - 2010, - №11, - с. 65-68.
7. А. Поскутников. Системы автоматического управления БПЛА. «Молодой ученый», - 2011, - №9, - с. 56-58.
8. В. Слосар. Радиолинии связи с БПЛА: Примеры реализации. Электроника: наука, технология, бизнес. - 2010, - №5 - с. 56050.
9. Конкин А.А. Углеродные и другие жаростойкие волокнисты материалы. M.: Высшая школа, 2004.
10. http:highpol.com.
11. http:newchemistry.ru
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2659147C1 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2643306C1 |
| Воздухоплавательный аппарат | 2017 |
|
RU2652322C1 |
| Воздухоплавательный аппарат | 2017 |
|
RU2652373C1 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ ЭЛЕКТРОПОЕЗД | 2017 |
|
RU2734559C2 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2015 |
|
RU2581971C1 |
| ВОЗДУШНОЕ ТАКСИ | 2015 |
|
RU2609660C1 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ ДЛЯ ОЧИСТКИ ВОЗДУХА ГОРОДОВ ОТ ГАЗОВ И ПЫЛИ | 2015 |
|
RU2577606C1 |
| СПАСАТЕЛЬНЫЙ ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2752038C2 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ ДЛЯ ОЧИСТКИ ВОЗДУХА ГОРОДОВ ОТ ГАЗОВ И ПЫЛИ | 2015 |
|
RU2609594C1 |


Изобретение относится к области воздухоплавательных аппаратов. Воздухоплавательный аппарат включает мультикоптер с четырьмя электродвижителями и двумя турбодвигателями, несущую ферму, газовые камеры, панель солнечной батареи, системы наблюдения, ориентации, связи и автоматического управления. Аппарат выполнен в жестком аэродинамическом корпусе эллипсоидной формы и состоит из несущей фермы с консолями, по концам которых подвешены четыре электродвижителя с изменяемым вектором тяги. На ферме находятся две гондолы, состоящие из жестких корпусов и газовых камер с постоянным и переменным объемом. Под несущей фермой находится газовая подушка, а в передней части несущей фермы находится монокрыло, снизу которой подвешены два турбовинтовых двигателя. В задней части несущей фермы расположены устройства стабилизации, состоящие из рулей, элеронов и закрылков, связанных посредством автоматизированной системы управления с элементами изменения объема газовых камер, что повышает устойчивость и управляемость аппарата в целом. Изобретение направлено на повышение устойчивости и управляемости аппарата. 1 з.п. ф-лы, 3 ил.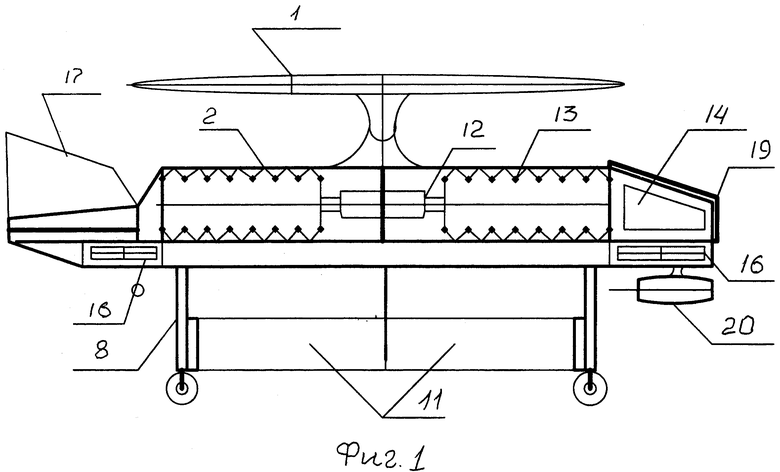
1. Воздухоплавательный аппарат, включающий мультикоптер с четырьмя электродвижителями и двумя турбодвигателями, несущую ферму, газовые камеры, панель солнечной батареи, системы наблюдения, ориентации, связи и автоматического управления, отличающийся тем, что он выполнен в жестком аэродинамическом корпусе эллипсоидной формы и состоит из несущей фермы с консолями, по концам которых подвешены четыре электродвижителя с изменяемым вектором тяги, на упомянутой ферме находятся две гондолы, состоящие из жестких корпусов и газовых камер с постоянным и переменным объемом, под упомянутой фермой находится газовая подушка, а в передней части упомянутой фермы находится монокрыло, снизу которого подвешены два турбовинтовых двигателя, в задней части упомянутой фермы расположены устройства стабилизации, состоящие из рулей, элеронов и закрылков, связанных посредством автоматизированной системы управления с элементами изменения объема газовых камер, что повышает устойчивость и управляемость аппарата в целом.
2. Воздухоплавательный аппарат по п. 1, отличающийся тем, что корпуса газовых камер переменного объема представляют собой сильфоны из жесткого металла или полимера, которые способны сжиматься и растягиваться под действием пневмодомкратов.
| Токарный резец | 1924 |
|
SU2016A1 |
| US 5026003 A1, 25.06.1991 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 6857601 B2, 22.02.2005 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ФЮЗЕЛЯЖЕМ, ВЫПОЛНЕННЫМ ПО СУЩЕСТВУ В ВИДЕ АЭРОСТАТИЧЕСКОГО ПОДЪЕМНОГО ТЕЛА, ДВИГАТЕЛЬНАЯ УСТАНОВКА И СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1998 |
|
RU2196703C2 |

