Область техники, к которой относится изобретение
Настоящая заявка находит конкретное применение в системах позитронной эмиссионной томографии (PET), в частности с использованием калибровки сканера PET. Однако следует учитывать, что описанная методика может также находить свое применение в других системах калибровки медицинских устройств визуализации, в других сценариях калибровки, или в других методиках калибровки сканеров.
Уровень техники
Обычные сканеры PET осуществляют калибровку нормализации для исправления неоднородного срабатывания трехмерного детектора, как описано в патенте США № 7718954, что обычно требует приблизительно 6 часов. Кроме того, такие сканеры применяют калибровку стандартных значений поглощения SUV, которые обеспечивают преобразование подсчетов в изображении в концентрацию активности. Эта калибровка использует распадающийся источник F-18 и может потребовать 11 часов или более для своего завершения.
Любое событие, даже два случайных единичных события, которые измеряются сканером PET и происходят в пределах интервала хронирования совпадений (например, 6 наносекунд), интерпретируются как событие совпадений, то есть как задающие достоверную линию срабатывания (LOR). Уменьшение частотности, с которой случайные события рассматриваются в качестве достоверных событий, является полезным по нескольким причинам. Например, уменьшение случайных событий увеличивает системную максимальную производительность скорости подсчета, эквивалентной шуму, NECR (по стандарту NEMA NU-2), и уменьшает объем данных для реконструирующей обработки (ускоряет реконструкции в списочном режиме). Кроме того, уменьшение случайных событий уменьшает объемы коррекции, которые необходимо должны быть сделаны во время реконструкции, и обеспечивает большую пропускную способность для того, чтобы сканер PET получал достоверные события совпадений.
Были предприняты попытки уменьшения случайных событий посредством уменьшения интервала хронирования совпадений до минимума, что требуется для того, чтобы охватывать объект, подлежащий визуализации (см., например, патент США № 7626171). Однако при таких подходах уменьшенный интервал совпадений изменяет характеристики подсчета системы, и поэтому требуется отдельная калибровка SUV для каждой используемой установки интервалов совпадений.
В настоящее время доступные на рынке сканеры PET обладают фиксированным интервалом совпадений, например приблизительно 6 наносекунд. Однако интервал совпадений может быть уменьшен для некоторых пациентов, особенно маленьких пациентов, и/или там, где осуществляется визуализация мозга и т.п., для обеспечения улучшенной дифференциации между истинными событиями и шумом (случайными событиями). Однако продолжительность интервала совпадений оказывает влияние на различные калибровки, включающие в себя нормализацию и SUV. Каждая калибровочная процедура требует очень больших затрат времени, обычно занимая 11-14 часов или более для каждого интервала совпадений.
В JP 11153669 A раскрыт сканер позитронной эмиссионной томографии (PET) и соединенный с ним процессор изображений. Данные изображения, получаемые сканером PET, отправляют процессору изображений, причем радиоактивность образца радиоактивного соединения, введенного пациенту, измеряют с помощью измерителя радиоактивности. Средство вычисления SUV оператора вычисляет концентрацию радиоактивности, соответствующую SUV=1, из введенной радиоактивности, общего количества препарата, веса пациента и дополнительных параметров. Процессор изображения разделяет данные изображения PET на концентрацию радиоактивности, соответствующую SUV=1, и преобразует ее в значение SUV. В конце преобразованное изображение отображают на устройстве отображения.
В US 7626171 B2 описан способ реконструкции времяпролетных (TOF) изображений, включающий в себя этап, на котором получают профиль субъекта, подлежащего визуализации, в области обследования системы визуализации. События, связанные с радиацией, испускаемой субъектом, обнаруживают и преобразуют в электронные данные. Электронные данные, соотносимые с событиями излучения вне профиля, удаляют и реконструируют изображения по оставшимся электронным данным.
Настоящая заявка обеспечивает новые и улучшенные системы калибровки сканера PET и способы, которые применяют перемеженные установки интервалов хронирования совпадений, при получении SUV на радиоактивном калибровочном фантоме, которые преодолевают вышеупомянутые и другие проблемы.
Раскрытие изобретения
В соответствии с одним аспектом, система способствует процессу калибровки сканера позитронной эмиссионной томографии (PET) и включает в себя сканер PET, в котором радиоактивный калибровочный фантом размещают и сканируют в течение заданного периода времени, и процессор, который выполняет машиноисполняемые инструкции, сохраняемые в запоминающем устройстве, причем инструкции включают в себя прием установок для множества выбранных интервалов хронирования совпадений и/или энергетических интервалов. Инструкции дополнительно включают в себя сканирование радиоактивного калибровочного фантома и получение данных совпадений для каждого из множества интервалов хронирования совпадений и/или энергетических интервалов, определяемых установками интервалов хронирования и/или энергетических интервалов, в течение времени каждого из множества кадров заданного периода времени. Кроме того, инструкции включают в себя вычисление стандартных значений поглощения из количества подсчетов фотонов, обнаруженных в каждом кадре, за заданный период времени для каждого выбранного интервала хронирования совпадений и/или энергетического интервала.
В соответствии с другим аспектом способ калибровки сканера в позитронной эмиссионной томографии (PET) включает в себя этапы, на которых: принимают установки для множества выбранных интервалов хронирования совпадений и/или энергетических интервалов, и сканируют радиоактивный калибровочный фантом, и получают данные совпадений для каждого интервала из множества выбранных интервалов хронирования совпадений и/или энергетических интервалов, определяемых установками интервалов хронирования и/или энергетических интервалов, в течение времени каждого кадра из множества кадров заданного периода времени. Способ дополнительно включает в себя этап, на котором вычисляют стандартные значения поглощения (SUV) из количества подсчетов фотонов, обнаруженных в каждом кадре, за заданный период времени, для каждого выбранного интервала хронирования совпадений и/или энергетического интервала.
В соответствии с другим аспектом, сканер PET включает в себя опорную раму с множеством детекторов радиоактивного излучения, которые обнаруживают события сцинтилляции, схему интервальной сортировки совпадений, которая идентифицирует пары обнаруженных событий в пределах множества интервалов совпадений различной продолжительности, и устройство пользовательского ввода данных, с помощью которого пользователь выбирает по меньшей мере один из интервалов совпадений. Сканер PET дополнительно включает в себя модуль коррекции нормализации, который применяет сохраняемые значения коррекции нормализации к полученным данным сканирования в выбранном интервале совпадений, модуль коррекции SUV, который применяет сохраняемые значения коррекции SUV к полученным данным сканирования в выбранном интервале совпадений, и процессор реконструкции, который реконструирует скорректированные данные сканирования в изображение для представления на устройстве отображения.
Одно преимущество состоит в том, что уменьшается время калибровки сканеров.
Другое преимущество заключается в калибровке сканеров для множества интервалов хронирования.
Кроме того, после прочтения и понимания следующего подробного описания специалистам в данной области техники будут понятны другие дополнительные преимущества предлагаемого изобретения.
Краткое описание чертежей
Изобретение может принимать должную форму в различных компонентах и структурах компонентов, и в различных этапах и структурах этапов. Чертежи приведены лишь в целях демонстрации различных аспектов и не должны расцениваться как ограничивающие изобретение.
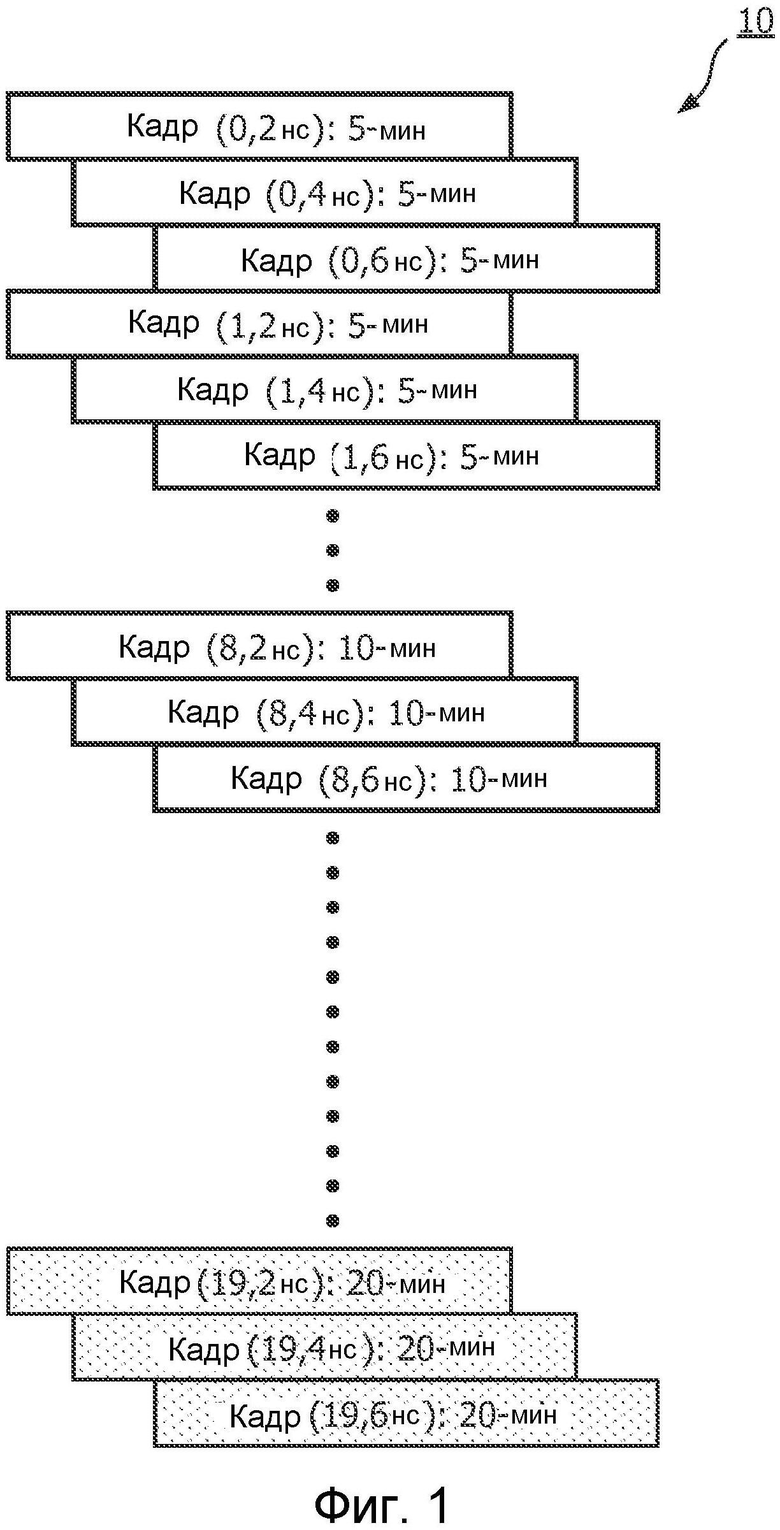
Фиг. 1 демонстрирует последовательность получения стандартных значений поглощения (SUV), которая использует перемеженные установки интервалов совпадений для осуществления одной калибровки SUV и нормализации для множества интервалов совпадений, что избавляет от необходимости осуществлять отдельные калибровки SUV и нормализации для каждой установки интервалов совпадений.
Фиг. 2 демонстрирует систему, способствующую процессу калибровки сканера PET, используя перемеженные установки интервалов хронирования совпадений во время последовательности получений SUV, в соответствии с различными аспектами, описанными в настоящем документе.
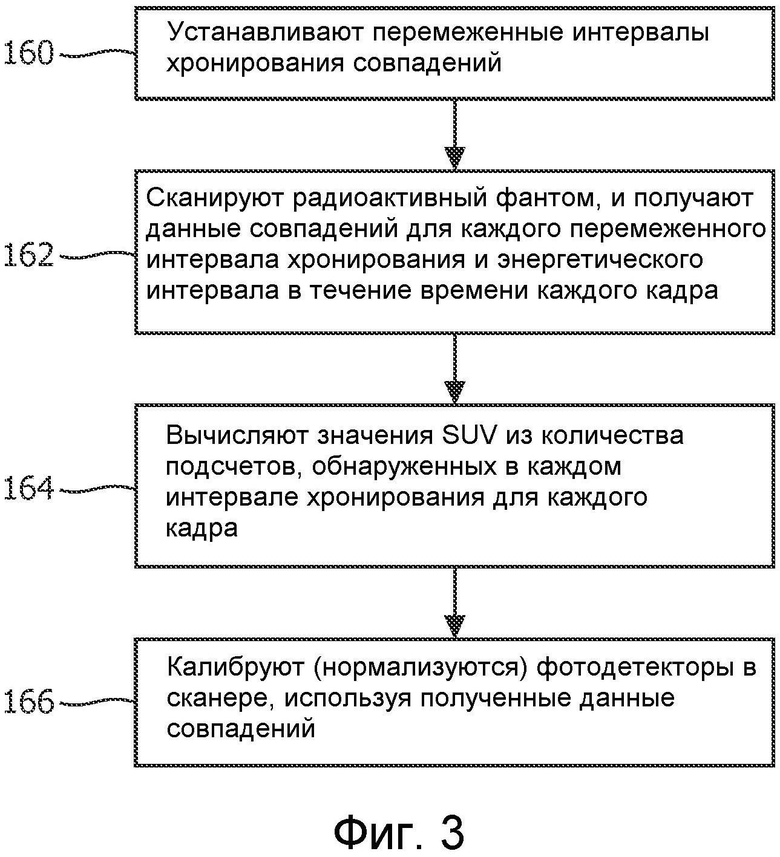
Фиг. 3 демонстрирует способ калибровки сканера PET, использующий перемеженные интервалы хронирования совпадений, в соответствии с различными аспектами, описанными в настоящем документе.
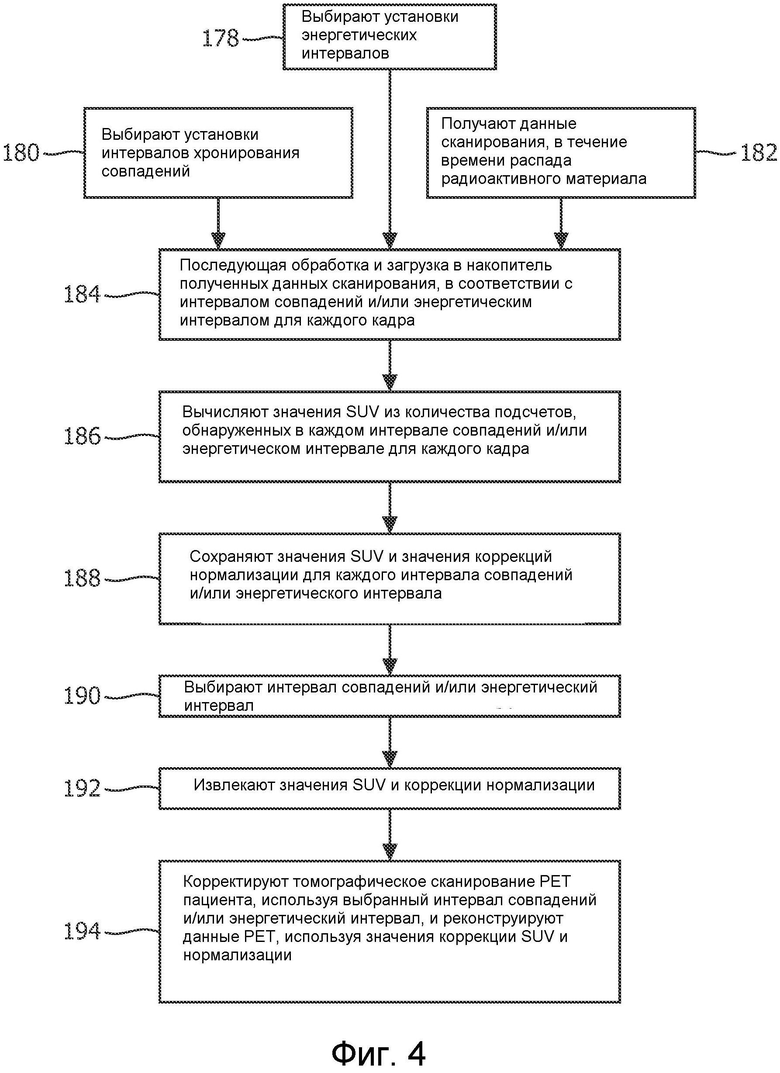
Фиг. 4 демонстрирует способ калибровки сканера PET с помощью последующей обработки данных совпадений, полученных из радиоактивного фантома, способ, использующий перемеженные интервалы хронирования совпадений для того, чтобы загружать в накопитель полученные данные, в соответствии с различными аспектами, описанными в настоящем документе.
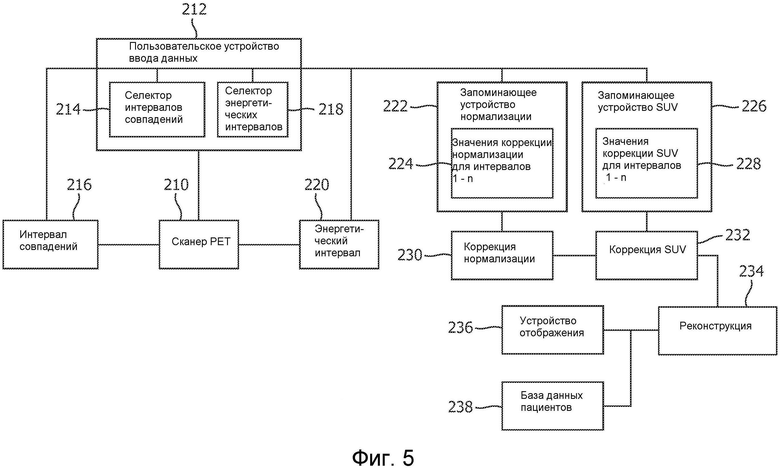
Фиг. 5 демонстрирует сканер PET, откалиброванный в соответствии с одним из способов калибровки, описанных выше.
Осуществление изобретения
Предлагаемое изобретение преодолевает проблему требующих длительного времени и трудоемких калибровок сканеров посредством сокращения продолжительности калибровок с помощью перемежения установок интервалов совпадений в рамках калибровки SUV. В другом варианте осуществления продолжительность калибровок уменьшается с помощью осуществления получений калибровок SUV и калибровок нормализации в самом большом интервале совпадений, и последующей обработки данных для требуемых интервалов совпадений.
Фиг. 1 демонстрирует последовательность 10 получения стандартных значений поглощения SUV, которая использует перемеженные установки интервалов совпадений для того, чтобы осуществлять единственную калибровку SUV и нормализацию для множественных интервалов совпадений, что избавляет от необходимости осуществлять отдельные калибровки SUV и нормализации для каждой установки интервалов совпадений. На Фиг. 1, три перемеженных интервала хронирования (например, 2 наносекунды, 4 наносекунды и 6 наносекунд) показываются для 20 кадров (отмеченных как 0-19). Каждый кадр разбивается на три части, каждая из которых соответствует одному из интервалов хронирования. При таком подходе случайные события уменьшаются в сканере PET, максимальная скорость подсчета, эквивалентная шуму (NECR), сканера PET максимально повышается как функция диаметра объекта, подлежащего визуализации. Значения SUV вычисляются, либо для каждого пикселя, либо по интересующей области (ROI), для каждого изображения или кадра динамического ряда в различных временных точках, в виде относительной величины сосредоточения радиоактивности в ткани. В контексте настоящего документа термины «случайное событие» или «случайный» обозначают происшествие, в котором два единичных события измеряются или обнаруживаются сканером PET в пределах интервала хронирования совпадений (например, 6 наносекунд или некоторого другого заданного интервала хронирования), и ошибочно интерпретируются или обрабатываются как событие совпадений (то есть как происходящее в результате единственного общего события аннигиляции).
Как хорошо известно в данной области техники, когда электрон и позитрон встречаются, они аннигилируются, излучая два гамма-луча 511 кэВ, которые являются противоположно направленными, в соответствии с принципом сохранения импульса. При получении данных PET два по существу одновременных или совпадающих события обнаружения гамма-луча 511 кэВ, предполагаются доказательно происходящими из одного и того же позитронно-электронного аннигиляционного события, которое поэтому располагается где-нибудь вдоль «линии срабатывания» (LOR), соединяющей два по существу одновременных события обнаружения гамма-лучей 511 кэВ. Эту линию срабатывания также иногда называют проекцией, и собираемые данные PET называются проекционными данными.
В общеупотребительной томографии PET два события обнаружения гамма-лучей 511 кэВ, происходящие в пределах выбранного короткого временного промежутка или интервала совпадений, такого как в пределах 6 наносекунд друг от друга, рассматриваются как задающие достоверную линию LOR. Из-за изменяющегося расположения аннигиляции по отношению к элементам детектора происходит небольшое (например, субнаносекунда) временное несовпадение между совпадающими гамма-событиями обнаружения фотонов. Соответствующая методика, называемая времяпролетной томографией PET или TOF-PET, использует в своих интересах это небольшое временное несовпадение для того, чтобы дополнительно локализовать позитронно-электронное аннигиляционное событие вдоль линии LOR. Вообще говоря, аннигиляционное событие произошло вдоль линии LOR в точке, расположенной ближе к тому событию обнаружения гамма-лучей, которое происходит раньше. Если два события обнаружения гамма-лучей происходят одновременно, с точностью до временной разрешающей способности детекторов, то аннигиляционное событие произошло в середине линии LOR.
При общеупотребительном подходе, который не использует перемеженное накопление данных калибровки из фантома с F-18, последовательность получений SUV для 20 кадров (например, кадров 0-19) занимает 11 часов на каждую установку интервалов совпадений. Согласно примеру, данные SUV для кадров 0-7 занимают 15 минут на каждый кадр, в общей сложности два часа; получение данных SUV для кадров 8-13 занимает 30 минут на каждый кадр, в общей сложности три часа, и получение данных SUV для кадров 14-19 занимает один час на каждый кадр, в общей сложности шесть часов. Одна причина того, что калибровочное сканирование занимает так много времени, заключается в том, что период полураспада радиоактивного материала F-18 равняется приблизительно 110 минутам, таким образом, 11-часовое сканирование обеспечивает данные за 6 периодов полураспада материала (то есть после 11 часов 98,5% радиоактивного материала F-18 распадается). Таким образом, данные необходимо иметь за 11-часовой период для того, чтобы калибровать фотоумножители в сканере до диапазона уровней радиоактивности. Другими словами, процесс калибровки сканера, использующий только данные, полученные во время первых 110 минут, обычно не обеспечивает достаточную точность для обнаружения радиоактивности низкого уровня, такой, которая может оказаться эквивалентной калибровочным данным, получаемым в течение 10-го или 11-го часа калибровочного сканирования. Кроме того, если пользователь запускает в действие последовательность получений SUV для трех установок интервалов совпадений (например, 2 нс, 4 нс и 6 нс), то обычный подход потребовал бы 33 часа (используя пример с F-18, упомянутый выше), плюс время на то, чтобы подготовить новый калибровочный фантом с F-18 для каждого интервала совпадений.
В настоящей заявке осознается необходимость адекватной выборки для калибровки в каждом кадре вместо того, чтобы производить непрерывную выборку в течение каждого целого кадра. С помощью перемежения накопления калибровочных данных для множества интервалов совпадений, как это показано на Фиг. 1, предыдущий пример последовательности получений калибровочных данных SUV может быть осуществлен для всех трех (или более) установок интервалов совпадений в единственном 11 часовом периоде сканирования с помощью фантома с F-18. Фиг. 1, таким образом, обеспечивает пример подхода к модифицированию обычной последовательности получений калибровок SUV, при котором получение калибровочных данных для каждого из интервалов совпадений является перемеженным во временных пределах каждого кадра. Установки интервалов совпадений в 2 наносекунд, 4 наносекунды и 6 наносекунд обеспечиваются в примере на Фиг. 1, хотя другие установки интервалов могут применяться, что будет оценено специалистами в данной области техники. Кроме того, специалистам в данной области техники будет понятно, что могут использоваться больше или меньше перемеженных установок для интервалов (например, 2, 3, 4, 5, 6 и т.д.).
Что касается каждого кадра, данные получаются для всех трех интервалов совпадений. Например, вместо того, чтобы тратить 15 минут на то, чтобы получать данные для единственного интервала хронирования в течение времени кадра 0, 5 минут тратятся на то, чтобы получать данные для каждого из трех интервалов совпадений в течение времени кадра 0. Это приводит к тому, что для данного интервала совпадений получаются только 1/3 данных за время всех кадров, по сравнению с общеупотребительными протоколами, но полученные данные для каждого интервала совпадений по-прежнему распространяются на весь период распада (например, 11-14 часов), что обеспечивает более чем достаточные данные для характеризации SUV и калибровки PMT в сканере PET. При таком подходе данные калибровки (значения SUV) получаются для всех трех (или другого количества) интервалов совпадений в течение полного 11-часового периода, что является предпочтительным, потому что калибровка сканера для каждого интервала совпадений улучшается, с помощью использования данных, накопленных за полный период радиоактивного распада (например, 6-7 периодов полураспада), но калибровка не требует запаса данных за 11 полных часов, для каждого интервала совпадений. Вместо этого периодические выборки могут быть выбраны для каждого интервала совпадений, в течение времени каждого кадра, выбираемого за 11-часовой период.
В одном варианте осуществления, аппаратное обеспечение, получающее данные, устанавливает временные отметки для каждого события излучения. События излучения являются подчиненными самому большому интервалу совпадений, так что события вне самого большого интервала совпадений, подлежащего калибровке, могут отбрасываться. Программное обеспечение просматривает временные отметки и производит сортировку пар совпадений, в соответствии со временем совпадений, например, среди событий, которые являются совпадающими в пределах 2 наносекунд, в пределах 4 наносекунд и в пределах 6 наносекунд. Этот подход позволяет получениям нормализации и получениям SUV запускаться в действие лишь один раз, с помощью самого широкого интервала совпадений (например, 6 наносекунд), и формировать решения для других интервалов совпадений, с помощью последующей обработки.
В одной методике, используются последовательные получения данных при различных интервалах совпадений. В одном варианте осуществления, калибровочные кадры обрабатываются в реальном времени (например, используя аппаратное обеспечение, программное обеспечение или комбинацию этого), чтобы одновременно применять множество установок интервалов совпадений. В другом варианте осуществления калибровки перемежают для того, чтобы они включали в себя изменение в дополнительных параметрах получения данных, например изменение в энергетическом интервале или в поперечных полях зрения.
Фиг. 2 демонстрирует систему 100, способствующую калибровке сканера 102 PET, причем система использует фантом 103, например фантом с F-18. Система 100 включает в себя процессор 104, который соединен со сканером PET и с запоминающим устройством 106. Запоминающее устройство сохраняет, и процессор выполняет машиноисполняемые инструкции для осуществления различных функций, способов, методик, процедур и т.д., описываемых в настоящем документе. Система дополнительно включает в себя пользовательский интерфейс 108, содержащий одно или более устройств 110 ввода данных (например, клавиатуру, манипулятор «мышь», пишущий элемент, сенсорный экран, микрофон и т.д.), и устройство 112 отображения, на котором информация представляется для пользователя.
Запоминающее устройство сохраняет программируемый модуль 114 последовательности получений данных калибровок SUV, который выполняется процессором 104 для определения данных 115 калибровок SUV, в течение времени сканирования калибровочного фантома с фтордезоксиглюкозой-18 (F-18), поскольку она радиоактивно распадается в области обследования сканера PET (например, за период распада продолжительностью в несколько часов). Данные SUV используются для того, чтобы вычислять стандартные значения поглощения как функцию от интервала совпадений, в течение времени сканирования, получающего данные. В одном варианте осуществления, фантом представляет собой цилиндрический фантом 20 см на 30 см. В другом варианте осуществления, фантом является сферическим.
Информация 116 установок интервалов совпадений вводится пользователем в пользовательский интерфейс 108 и сохраняется в запоминающем устройстве 106. Дополнительно, запоминающее устройство сохраняет один или более алгоритмов 118 реконструкции, которые выполняются процессором 120 реконструкции для реконструкции визуализации калибровочного фантома и/или других объектов после калибровки сканера 102 PET. Как только данные 115 калибровок SUV были получены, процессор реализует калибровочный модуль 122, который производит калибровку стандартных значений поглощения для сканера 102 PET. Кроме того, процессор реализует модуль 124 нормализации, который сохраняется в запоминающем устройстве, для вычисления коррекции нормализации для каждого из фотодетекторов или фотоэлектронных умножителей в сканере PET, таким образом, чтобы все элементы, воспринимающие радиоактивное излучение, обладали общей чувствительностью к падающему излучению. Калибровка нормализации также осуществляется для каждого интервала совпадений. Те же самые методики, что и описываемые выше для калибровки SUV, могут использоваться для того, чтобы калибровать нормализацию для каждого из интервалов совпадений.
Перемежаемый сбор калибровочных данных для каждого интервала совпадений способствует обеспечению настраиваемого и/или выбираемого интервала совпадений, например, в 2, 4 или 6 наносекунд. Значения SUV и нормализации калибруются в единственной калибровочной процедуре, с помощью калибровочного модуля 122 и модуля 124 нормализации. Чтобы осуществлять калибровку SUV, данные обычно выбираются с помощью фантома с F-18, поскольку F-18 распадается за некоторое количество часов, например за 14 часов. В одном варианте осуществления, данные собирают циклически, в течение каждого из времен интервалов совпадений, для формирования ряда точек в течение упомянутых 14 часов, чтобы задать три кривых поглощения, как это показано в последовательности получения данных на Фиг. 1.
В другом варианте осуществления для всех данных устанавливаются временные отметки с достаточной точностью, и данные 126 с временными отметками сортируются сортирующим модулем 127, реализуемым процессором 104, как события, которые являются совпадающими в пределах 2 наносекунд, в пределах 4 наносекунд или в пределах 6 наносекунд. Эти показания и моменты времени их накопления могут использоваться для того, чтобы сформировать кривые 128 калибровок SUV для каждого интервала совпадений.
В другом варианте осуществления модуль 130 настроек энергетических интервалов обеспечивает настраиваемый энергетический интервал. Другими словами, для полученных данных сканирования F-18, ширина энергетического пика, или амплитуды энергии, приблизительно около 511 кэВ, которая считается достоверной, является настраиваемой. Однако изменение энергетического интервала также изменяет и калибровки SUV и нормализации. В этом случае, методики, описываемые в настоящем документе, используются, чтобы калибровать SUV и нормализацию для каждого интервала из множества энергетических интервалов в единственной калибровочной процедуре, использующей или методику перемежения или с помощью записывания энергии каждого события и сортировки по энергетическим интервалам.
Согласно другому варианту осуществления, ядерный сканер 102 представляет собой времяпролетный сканер PET (TOF, time-of-flight), и данные 132 TOF сохраняются в запоминающем устройстве 106, для использования для улучшения точности при реконструкции изображений PET.
Как это указано выше, система 100 включает в себя процессор 104, который выполняет машиноисполняемые инструкции, и запоминающее устройство 106, которое сохраняет машиноисполняемые инструкции (например, процедуры, программы, алгоритмы, программный код и т.д.), для осуществления различных функций, способов, процедур и т.д., описываемых в настоящем документе. Кроме того, термин «модуль» в контексте настоящего документа означает множество выполняемых компьютером инструкций, программный код, программу, процедуру и т.п., как будет понятно специалистам в данной области техники.
Запоминающее устройство может представлять собой машиночитаемый носитель, на котором сохранена управляющая программа, такой как диск, жесткий диск и т.п. Общеупотребительные формы машиночитаемых носителей включают в себя, например, дискеты, гибкие диски, жесткие диски, магнитную ленту или любой другой носитель магнитного сохранения, CD-ROM, DVD, или любой другой оптический носитель, RAM, ROM, PROM, EPROM, FLASH-EPROM, разновидности этого, другие микросхемы или съемный диск запоминающего устройства, или любой другой материальный носитель, из которого процессор может считывать и выполнять. В этом контексте, системы, описываемые в настоящем документе, могут быть реализованы в одном или более универсальных компьютеров, компьютере (компьютерах) особого назначения, программируемом микропроцессоре или микроконтроллере и периферических элементах интегральных схем, ASIC или других интегральных схем, процессоров цифровых сигналов, электронной или логической схемы в составе аппаратного обеспечения, такой как схема обособленных элементов, программируемом логическом устройстве, таком как PLD, PLA, FPGA, центральном процессоре CPU графической карты (GPU), или PAL, и т.п., или в виде упомянутых средств.
Фиг. 3 и Фиг. 4 демонстрируют способы, относящиеся к калибровке сканера PET, использующие перемеженные установки интервалов совпадений, в соответствии с различными признаками. В то время как способы в настоящем документе описываются в виде последовательностей действий, должно быть понято то, что не все действия могут быть востребованы для того, чтобы достигать описанных целей и/или результатов, и что некоторые действия, в соответствии с некоторыми аспектами, могут быть совершены в порядке, отличающемся от специфических описанных порядков действий.
Фиг. 3 демонстрирует способ для того, чтобы калибровать сканер PET, способ, использующий перемеженные интервалы совпадений, в соответствии с различными аспектами, описанными в настоящем документе. На этапе 160 выбирают или устанавливают перемеженные интервалы совпадений. В одном примере устанавливают три интервала хронирования, в 2 наносекунды, в 4 наносекунды и в 6 наносекунд соответственно. Однако следует учитывать, что могут быть установлены другие установки интервалов хронирования (например, в 1 нс, 1,5 нс, 2,7 нс, 3 нс, 5 нс и т.д.), также как и другие количества интервалов хронирования (например, 2, 4, 5 и т.д.). На этапе 162 сканируют радиоактивный фантом, и данные совпадений получаются для каждой из установок интервалов совпадений и каждого из энергетических интервалов. На этапе 164 данные совпадений анализируют для определения стандартизированных значений поглощения (SUV) для фантома в каждом кадре, и для каждого интервала хронирования. Значение SUV вычисляют либо для каждого пикселя, либо по интересующей области (ROI), для каждого изображения или кадра динамического ряда в различных временных точках, в виде относительной величины сосредоточения радиоактивности в ткани. На этапе 166 фотодетекторы в сканере PET нормализуют с использованием полученных данных совпадений для каждой установки интервалов совпадений и каждой установки энергетических интервалов. Калибровка фотодетектора обычно включает в себя настройку пространственного усиления и смещение массива фотодетекторов, чтобы гарантировать пространственную и энергетическую состоятельность и точность.
Фиг. 4 демонстрирует способ калибровки сканера PET с помощью последующей обработки данных совпадений, полученных из радиоактивного фантома, накопленных в списочном режиме. На этапе 178 выбирают установки энергетических интервалов. Обнаруженные события излучения, которые попадают за пределы выбранного энергетического интервала (интервалов), будут отброшены, когда будут корректироваться полученные данные сканирования для реконструкции. На этапе 180 выбирают установки интервалов хронирования совпадений. Пары обнаруженных событий излучения, которые попадают в пределы выбранного интервала (интервалов) совпадений, используют для определения значений SUV для калибровки сканера и нормализации. На этапе 182 сканируют радиоактивный фантом для получения данных, пока распадается радиоактивный материал (например, в течение 14-часового периода и т.п.). Данные собирают в списочном режиме, в котором для каждого события устанавливается временная отметка и его энергия регистрируется. На этапе 184 данные в списочном режиме подвергают последующей обработке для их загрузки в накопитель или сортировки данных в соответствии с тем интервалом из множества выбранных интервалов совпадений, в который попадают конкретные данные, и/или с тем, в какой интервал из множества выбранных энергетических интервалов попадают конкретные данные. На этапе 186 данные совпадений в каждом накопителе анализируют для вычисления стандартизированных значений поглощения SUV (standardized uptake value) для фантома в каждом кадре, и для каждого выбора интервала хронирования и/или энергетического интервала. Значение SUV вычисляют либо для каждого пикселя, либо по интересующей области (ROI), для каждого изображения или кадра динамического ряда в различных временных точках, в виде относительной величины сосредоточения радиоактивности в ткани. На этапе 188 сохраняют значения коррекции SUV и нормализации. Когда пациента собираются подвергнуть сканированию, один из интервалов совпадений и/или энергетических интервалов выбирают на этапе 190. Соответствующие значения коррекции SUV и нормализации извлекают на этапе 192. На этапе 194 получают данные PET (например, пациент подвергается сканированию) и корректируют в соответствии с извлеченными значениями SUV и нормализации. Скорректированные данные реконструируют в изображение для отображения на устройстве отображения и/или для сохранения.
Фиг. 5 демонстрирует сканер PET 210, откалиброванный в соответствии с одним из вышеупомянутых описанных способов калибровки. Сканер PET включает в себя опорную раму с некоторым количеством детекторов радиоактивного излучения, которые обнаруживают события излучения (например, гамма-лучи и т.д.). Предусмотрено пользовательское устройство 212 ввода данных, и оно включает в себя селектор 214 интервалов совпадений, с помощью которого пользователь вводит или выбирает установки интервалов совпадений, которые устанавливают границы одного или более интервалов совпадений, в пределах которых события излучения загружаются в накопитель или распределяются по категориям, с помощью схемы 216 интервальной сортировки совпадений. Устройство ввода данных также включает в себя селектор 218 энергетических интервалов, с помощью которого пользователь вводит или выбирает установки энергетических интервалов, которые задают один или более энергетических интервалов. Схема 220 энергетических интервалов исключает или отбрасывает обнаруженные события излучения, которые не находятся в пределах выбранного энергетического интервала. Интервалы совпадений и/или энергетические интервалы используются для того, чтобы калибровать сканер PET, как это описывается в настоящем документе.
Система дополнительно включает в себя запоминающее устройство 222 нормализации, которое сохраняет значения 224 коррекции нормализации, выведенные в течение времени калибровки для множества интервалов хронирования совпадений и/или энергетических интервалов, и запоминающее устройство 226 SUV, которое сохраняет значения 228 коррекции SUV, выведенные в течение времени калибровки для множества интервалов хронирования совпадений и/или энергетических интервалов. Модуль 230 коррекции нормализации (например, процессор) извлекает значения 224 коррекции нормализации для данного интервала совпадений или энергетического интервала, используемых при сканировании субъекта, и подвергает нормализации полученные данные сканирования. Модуль 232 коррекции SUV (например, процессор) извлекает сохраняемые значения коррекции SUV 228 и осуществляет коррекцию SUV на полученных данных сканирования. Процессор 234 реконструкции после этого реконструирует изображение субъекта, которое представляется пользователю на устройстве 236 отображения и/или сохраняется в базе 238 данных пациентов для последующего извлечения и отображения на устройстве отображения.
Изобретение было описано со ссылкой на несколько вариантов осуществления. После прочтения и понимания вышеприведенного подробного описания могут быть созданы другие модификации и изменения. Подразумевается, что изобретение следует истолковывать как включающее в свой объем все такие модификации и изменения в той степени, в какой они находятся в пределах объема прилагаемой формулы изобретения или ее эквивалентов.
Изобретение относится к системам позитронной эмиссионной томографии (PET), в частности с использованием калибровки сканера PET. При калибровке сканера позитронной эмиссионной томографии (PET) радиоактивный калибровочный фантом сканируют в течение периода нескольких времен полураспада, чтобы получить множество кадров данных сканирования. Перемеженные интервалы применяют, чтобы способствовать получению данных совпадений для множества интервалов хронирования совпадений и энергетических интервалов во время одного действия калибровочного сканирования. Совпадающие события загружают в накопитель в соответствии с каждым из множества выбранных интервалов совпадений и калибруют сканер PET для каждого из множества интервалов хронирования совпадений с использованием данных, полученных из одного калибровочного сканирования. Технический результат - уменьшение времени калибровки сканера. 4 н. и 11 з.п. ф-лы, 5 ил.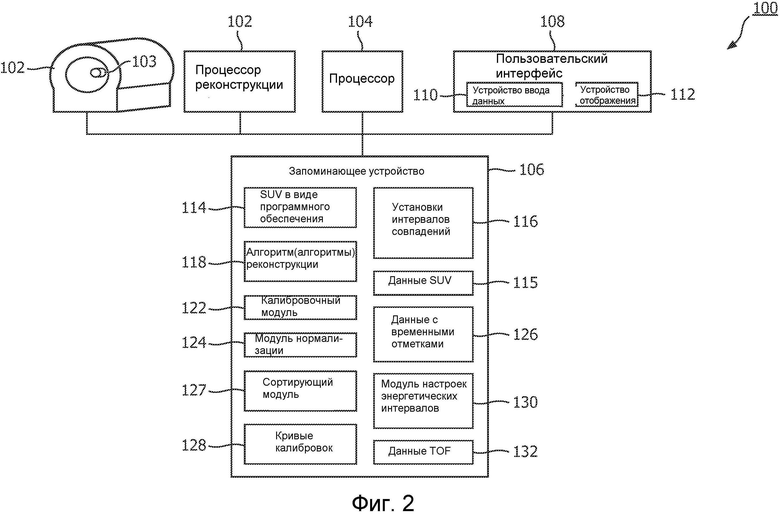
1. Система (100) калибровки сканера позитронной эмиссионной томографии (PET), включающая в себя:
сканер (102) PET, который выполнен с возможностью размещения и сканирования радиоактивного калибровочного фантома в течение заданного периода времени;
процессор (104), который выполнен с возможностью выполнения машиноисполняемых инструкций, сохраняемых в запоминающем устройстве (106), причем инструкции включают в себя:
прием установок для множества выбранных интервалов хронирования совпадений и/или выбранных энергетических интервалов;
сканирование радиоактивного калибровочного фантома сканером (102) PET в течение заданного периода времени и получение данных совпадений для каждого из множества интервалов хронирования совпадений и/или энергетических интервалов, определяемых установками интервалов хронирования и/или энергетических интервалов, в течение каждого из множества кадров заданного периода времени; и
вычисление стандартных значений поглощения из некоторого количества подсчетов фотонов, обнаруженных в каждом кадре, за заданный период времени для каждого выбранного интервала хронирования совпадений и/или выбранного энергетического интервала.
2. Система по п. 1, причем инструкции дополнительно включают в себя формирование калибровочной кривой из стандартных значений поглощения для каждого из интервалов хронирования и использование калибровочной кривой для калибровки фотодетекторов.
3. Система по любому из пп. 1 или 2, причем инструкции дополнительно включают в себя:
вычисление значения коррекции нормализации, которые корректируют различия в чувствительности фотодетекторов в сканере PET.
4. Система по любому из пп. 1 или 2, в которой радиоактивный калибровочный фантом представляет собой калибровочный фантом с фтордезоксиглюкозой-18 (F-18).
5. Система по любому из пп. 1 или 2, в которой множество установок интервалов хронирования совпадений и/или энергетических интервалов перемежают и в которой инструкции дополнительно включают в себя:
получение данных совпадений для множества перемеженных интервалов хронирования совпадений, определяемых перемеженными установками интервалов хронирования совпадений и/или энергетических интервалов.
6. Система по любому из пп. 1 или 2, причем инструкции дополнительно включают в себя:
сохранение значений (224) коррекции нормализации и значений (228) коррекции SUV для множества интервалов хронирования совпадений и/или энергетических интервалов;
осуществление сканирования PET субъекта;
коррекцию полученных данных сканирования субъекта с использованием значений коррекции нормализации и значений коррекции SUV;
реконструкцию изображения субъекта с использованием скорректированных данных сканирования; и
сохранение реконструированного изображения в базе (238) данных пациентов.
7. Система по любому из пп. 1 или 2, в которой множество кадров включает в себя приблизительно 20 кадров, полученных за период времени, содержащий приблизительно 6-8 периодов полураспада радиоактивного материала, который содержится в радиоактивном калибровочном фантоме.
8. Система по любому из пп. 1 или 2, в которой сканер PET представляет собой времяпролетный сканер PET.
9. Способ калибровки сканера позитронной эмиссионной томографии (PET), включающий в себя этапы, на которых:
принимают установки для множества выбранных интервалов хронирования совпадений и/или энергетических интервалов;
сканируют радиоактивный калибровочный фантом и получают данные совпадений для каждого из множества интервалов хронирования совпадений и/или энергетических интервалов, определяемых установками интервалов хронирования и/или энергетических интервалов, во время каждого кадра из множества кадров заданного периода времени; и
вычисляют стандартные значения поглощения (SUV) из количества подсчетов фотонов, обнаруженных в каждом кадре, за заданный период времени для каждого выбранного интервала хронирования совпадений и/или энергетического интервала.
10. Способ по п. 9, дополнительно включающий в себя этапы, на которых:
формируют калибровочную кривую из стандартных значений поглощения для каждого из интервалов хронирования и используют калибровочные кривые для калибровки фотодетекторов.
11. Способ по любому из пп. 9 или 10, дополнительно включающий в себя этап, на котором:
вычисляют значения коррекции нормализации, которые корректируют различия в чувствительности фотодетекторов в сканере PET.
12. Способ по любому из пп. 9 или 10, в котором данные совпадений собирают в списочном режиме и который дополнительно включает в себя этапы, на которых:
устанавливают временную отметку для каждого принятого события излучения;
сортируют события излучения в соответствии с тем, какому интервалу из множества интервалов хронирования совпадений и/или энергетических интервалов соответствует каждая пара совпадающих событий.
13. Способ по любому из пп. 9 или 10, в котором множество установок для интервалов хронирования совпадений и/или для энергетических интервалов перемежают и в котором инструкции дополнительно включают в себя:
получение данных совпадений для множества перемеженных интервалов хронирования совпадений, определяемых перемеженными установками интервалов хронирования совпадений и/или энергетических интервалов.
14. Машиночитаемый носитель (106), содержащий компьютерную программу, которая при выполнении процессором осуществляет способ по любому из пп. 9-13.
15. Сканер PET, включающий в себя:
опорную раму с множеством детекторов радиоактивного излучения, которые обнаруживают события сцинтилляции;
схему (216) интервальной сортировки совпадений, которая идентифицирует пары обнаруженных событий в пределах множества интервалов совпадений различной продолжительности;
устройство пользовательского ввода данных, с помощью которого пользователь выбирает по меньшей мере один из интервалов совпадений;
модуль (230) коррекции нормализации, который применяет сохраняемые значения коррекции нормализации к полученным данным сканирования в выбранном интервале совпадений;
модуль (232) коррекции SUV, который применяет сохраненные значения коррекции SUV к полученным данным сканирования в выбранном интервале совпадений; и
процессор (234) реконструкции, который реконструирует скорректированные данные сканирования в изображение для представления на устройстве отображения.
| JPH 11153669 A, 08.06.1999 | |||
| US 7626171 B2, 01.12.2009 | |||
| US 20060138315 A1, 29.06.2006 | |||
| СИСТЕМА ПОЗИТРОН-ЭМИССИОННОЙ ТОМОГРАФИИ | 2005 |
|
RU2381525C2 |

