Изобретение относится к системам радионуклидной визуализации. Изобретение находит применение, в частности, в связи с детекторами для позитронной эмиссионной томографии (ПЭТ) и, более конкретно, в пиксельных сцинтилляторах с твердотельными датчиками.
В позитронной эмиссионной томографии (ПЭТ) события радиоактивного распада радиофармацевтического препарата образуют позитроны. Каждый позитрон взаимодействует с электроном с возникновением события аннигиляции электрон-позитронной пары, которое испускает два противоположно направленных гамма-кванта. С использованием схем детектирования совпадений, кольцевая матрица детекторов излучения, окружающая визуализируемого субъекта (пациента), обнаруживает события испускания совпадающих по времени, противоположно направленных гамма-квантов, соответствующие аннигиляции электрон-позитронной пары. Линия ответа (LOR), соединяющая две совпадающих регистрации, содержит положение события аннигиляции электрон-позитронной пары. Упомянутые линии ответа аналогичны данным проекций и допускают реконструкцию для формирования двух- или трехмерного изображения. При времяпролетной ПЭТ (TOF-PET) небольшая разновременность между регистрациями двух совпадающих событий испускания гамма-квантов служит для локализации события аннигиляции вдоль линии ответа (LOR).
Современные системы визуализации методом позитронной эмиссионной томографии (ПЭТ-визуализации) содержат слой сцинтиллятора и матрицу фотоумножителей (ФЭУ) с оптическим контактным слоем, расположенным между ними. Гамма-кванты, образованные в результате события их испускания, воздействуют на сцинтилляционный слой, который в свою очередь создает сцинтилляционную вспышку, которая порождает множество световых фотонов. Фотоны из сцинтилляционного кристалла обнаруживаются ФЭУ, которые вырабатывают сигналы, пропорциональные энергии падающего гамма-кванта. Для анализа выходных сигналов с целью определения локализации каждой сцинтилляции на сцинтилляционном слое применяют логические схемы Ангера. Каждое сцинтилляционное событие обнаруживается более чем одним ФЭУ. Координаты каждого сцинтилляционного события определяют по относительной амплитуде сцинтилляционных фотонов.
Для повышения разрешающей способности систем ПЭТ-визуализации стали применять пиксельные сцинтилляторы, которые содержат матрицу оптически изолированных сцинтиллирующих кристаллов. Кольцо детекторов имеет диаметр приблизительно 90 см и ширину приблизительно 15-25 см. Вместо нескольких крупных блочных сцинтилляторов, соединенных между собой для формирования внутреннего слоя кольца детекторов, пиксельный сцинтиллятор выполнен из тысяч плотно упакованных сцинтиллирующих кристаллов, которые имеют размеры приблизительно от 2×2 мм2 до 4×4 мм2. Все сцинтиллирующие кристаллы оптически изолированы между собой посредством тонкого отражательного листа для ослабления взаимного влияния смежных пикселей. С пиксельными сцинтилляторами по-прежнему применяют логические схемы Ангера для определения координат сцинтилляционных событий. Однако, поскольку логические схемы Ангера в принципе созданы для обработки единственного сцинтилляционного события, обнаруживаемого несколькими детекторами, для определения локализации события излучения, то в направлении краев привносятся геометрические искажения, известные как краевое сжатие, так как число детекторов, имеющихся на краях, ограничено. В общем, регистрация в центре кольца детекторов оказывается намного точнее, чем ближе к краям.
Для точной реконструкции изображения требуется измерять такие характеристики, как энергетическое разрешение, временное разрешение, собирание света и т.п., для каждого кристалла, так как отдельные кристаллы могут иметь изменяющиеся характеристики в дополнение к изменениям между детекторами. Упомянутые изменения приводят к неравномерностям между вычисленным событием излучения и точным положением, в котором имело место сцинтилляционное событие. Измеренные характеристики используют для калибровки системы, чтобы обеспечить оптимальные пространственное разрешение и чувствительность.
Современные методы калибровки предусматривают облучение матрицы детекторов источником заливающего аннигиляционного излучения, чтобы сформировать залитое изображение. Залитое изображение является двумерным распределением обнаруживаемых событий излучения, в котором каждый пик соответствует одному кристаллу в пиксельном сцинтилляторе. С системами, не разбитыми на отдельные пиксельные элементы, или системами блочных детекторов используют маску с точечными отверстиями, чтобы перекрывать сцинтилляционный блок для формирования 2-мерного распределения обнаруживаемых событий. По залитому изображению формируют калибровочную карту для отображения положения вычисленных событий излучения в фактическое положение соответствующего сцинтилляционного кристалла. Калибровочную карту используют для исключения любых геометрических искажений в полученных данных изображения. Формирование калибровочной карты во многом зависит от вмешательства оператора и может занять до восьми часов работы квалифицированного технического специалиста. В данном случае существует потребность в автоматизированном способе и соответствующей системе для сокращения времени калибровки систем радионуклидной визуализации.
В настоящей заявке предлагаются новые и усовершенствованные система и способ идентификации кристаллов, которые решают вышеупомянутые и другие проблемы.
В соответствии с одним аспектом предлагается способ автоматизированной идентификации кристаллов в системах радионуклидной визуализации. Формируют залитое изображение, которое содержит множество пиков, при этом каждый пик является откликом на принятое излучение, и каждый пик сопоставлен с соответствующим сцинтилляционным кристаллом. Залитое изображение разбивают на множество областей, при этом каждую область маскируют для соответствия одной из матриц детекторов ядерных излучений. Каждый пик аппроксимируют по меньшей мере одной гауссовой моделью и формируют изображение моделей, на котором аппроксимирующие гауссовы модели представляют идентифицированные пики. Определяют неправильно идентифицированные пики на изображении моделей, на котором положения пиков на залитом изображении отличаются от соответствующего сцинтилляционного кристалла, и корректируют положения неправильно идентифицированных пиков на залитом изображении на основании общих данных обо всех пиках и локальных данных о соседних пиках в изображении моделей.
Процессор для идентификации кристаллов может быть дополнительно выполнен с возможностью выполнения этапа коррекции положений пиков на залитом изображении по фактическому положению сцинтилляционных кристаллов. Кроме того, процессор для идентификации кристаллов может быть дополнительно выполнен с возможностью выполнения этапа определения набора параметров деформации для каждой области разбиения посредством сравнения области разбиения с шаблоном. Процессор для идентификации кристаллов может быть дополнительно выполнен с возможностью выполнения этапа определения границ для каждого сцинтилляционного кристалла на основании соответствующего скорректированного положения и локального минимума, равноудаленного между соседними гауссовыми моделями в изображении моделей.
Кроме того, этап определения неправильно идентифицированных пиков на модели изображений может включать в себя этап идентификации разделенных точек на изображении моделей, которые возникают в промежуточной зоне между двумя соседними детекторами ядерного излучения или вблизи нее, при этом разделенные точки возникают, когда два или более детекторов ядерного излучения обнаруживают одно и то же событие излучения, приводящее к возникновению двух или более пиков в непосредственной близости между собой, соответствующих одному и тому же сцинтилляционному кристаллу; и этап исправления положения локального минимума, равноудаленного между неразделенным центром и ближайшим центром разделенных точек для одного и того же сцинтилляционного кристалла.
Кроме того, этап определения неправильно идентифицированных максимумов может включать в себя этап вычисления расстояния между положениями соседних моделей гауссовой поверхности в каждой области разбиения; этап сравнения расстояний с общим средним расстоянием между всеми соседними пиками и/или локальным средним расстоянием соседних моделей гауссовой поверхности; и этап пометки модели гауссовой поверхности как неправильно идентифицированной, если по меньшей мере одно расстояние между соседними моделями не удовлетворяет критерию общего среднего и/или критерию локального среднего.
В одном варианте осуществления этап определения набора параметров деформации каждой области разбиения может включать в себя этап формирования базы данных шаблонов; этап итерационного искривления каждой области по двум измерениям для определения коэффициента сдвига, коэффициента масштабирования и коэффициента поворота, пока искривленная область не соответствует по меньшей мере одному из шаблонов из базы данных шаблонов в соответствии с оптимизацией методом наименьших квадратов; при этом коэффициент сдвига, коэффициент масштабирования, коэффициент поворота и сопоставленный шаблон совместно определяют набор параметров деформации.
Этап определения границ для каждого сцинтилляционного кристалла может включать в себя этап отображения скорректированных положений и соответствующих гауссовых моделей в изображении моделей из пространства изображений в шаблон, например прямоугольное пространство, инвариантное относительно деформации; этап определения границ каждого сцинтиллятора на основании отображенных гауссовых моделей на шаблоне; и этап отображения шаблона и определенных границ обратно в пространство изображения.
В соответствии с другим аспектом предлагается система идентификации кристаллов. Система идентификации кристаллов содержит память изображений, которая принимает залитое изображение, которое содержит множество пиков, при этом каждый пик является откликом на излучение, обнаруженное соответствующим сцинтилляционным кристаллом. Процессор для идентификации кристаллов выполнен с возможностью разбиения залитого изображения на множество областей, при этом каждая область маскирована, чтобы соответствовать одной из матриц детекторов ядерных излучений. Затем каждый пик аппроксимируют по меньшей мере одной гауссовой моделью. Формируют изображение моделей, на котором аппроксимирующие гауссовы модели представляют идентифицированные пики. Определяют неправильно идентифицированные пики на изображении моделей, на котором положения пиков на залитом изображении отличаются от соответствующего сцинтилляционного кристалла, и положения неправильно идентифицированных пиков на залитом изображении корректируют на основании общих данных обо всех пиках и локальных данных о соседних пиках на изображении моделей.
В соответствии с другим аспектом предлагается система радионуклидной визуализации. Система радионуклидной визуализации содержит матрицу детекторов излучения, ориентированных вокруг области исследования для приема излучения от радиофармацевтического препарата, введенного субъекту (пациенту). Детектор совпадений обнаруживает пары обнаруженных событий излучения и определяет данные проекций, соответствующие совпадающим парам. Калибровочный процессор корректирует геометрические искажения в полученных данных проекций с использованием системы идентификации кристаллов, и реконструирующий процессор реконструирует скорректированные данные проекций в виде представляемого изображения.
Одним из получаемых преимуществ является сокращение времени и стоимости калибровки.
Другое преимущество состоит в том, что уменьшаются геометрические искажения в данных радионуклидного изображения.
Другое преимущество состоит в том, что способ требует меньше вмешательства оператора или совсем не нуждается в таком вмешательстве.
Дополнительные преимущества настоящего изобретения станут очевидными специалистам со средним уровнем компетентности в данной области техники после прочтения и изучения нижеследующего подробного описания.
Изобретение может принимать форму различных компонентов и схем расположения компонентов и различных этапов и схем расположения этапов. Чертежи предназначены только для иллюстрации предпочтительных вариантов осуществления и не подлежат истолкованию в смысле ограничения изобретения.
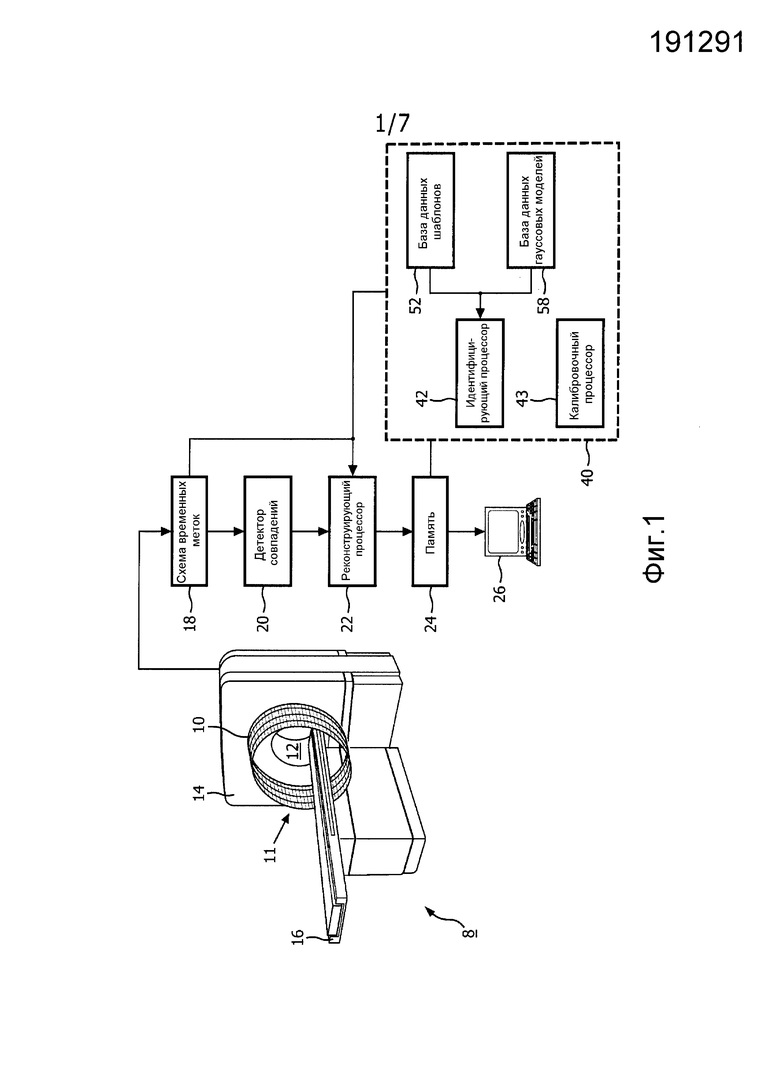
Фиг.1 - схематичное изображение системы радионуклидной визуализации с системой идентификации кристаллов.
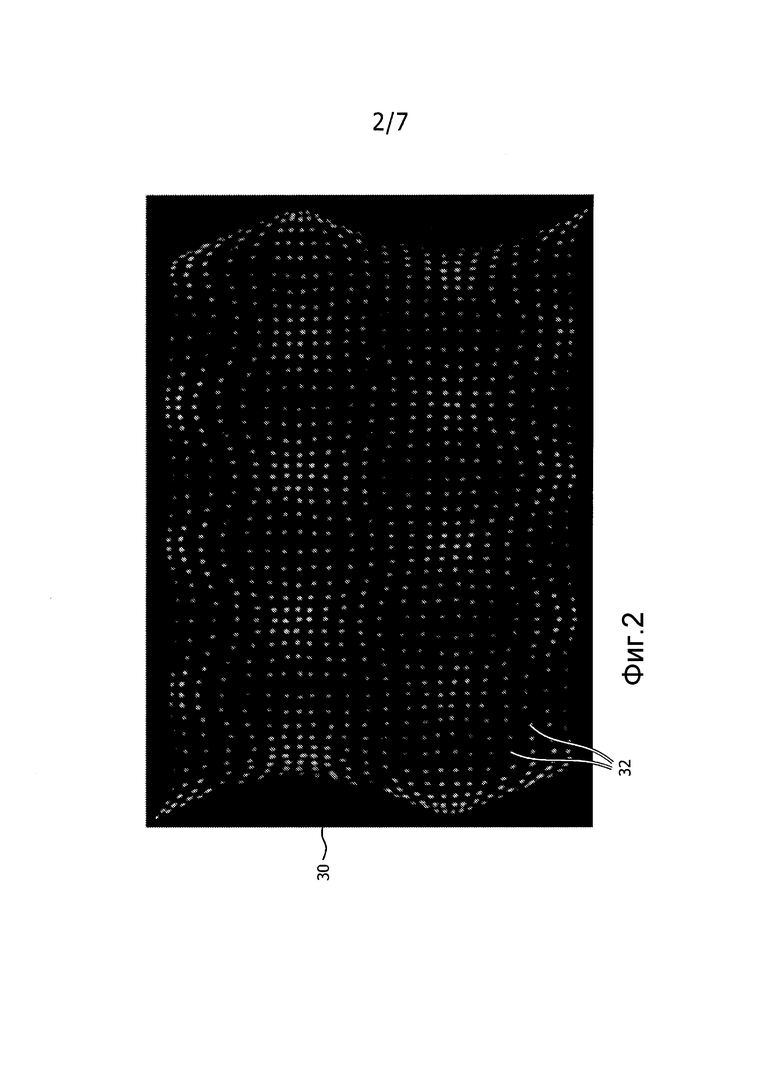
Фиг.2 - пример залитого изображения.
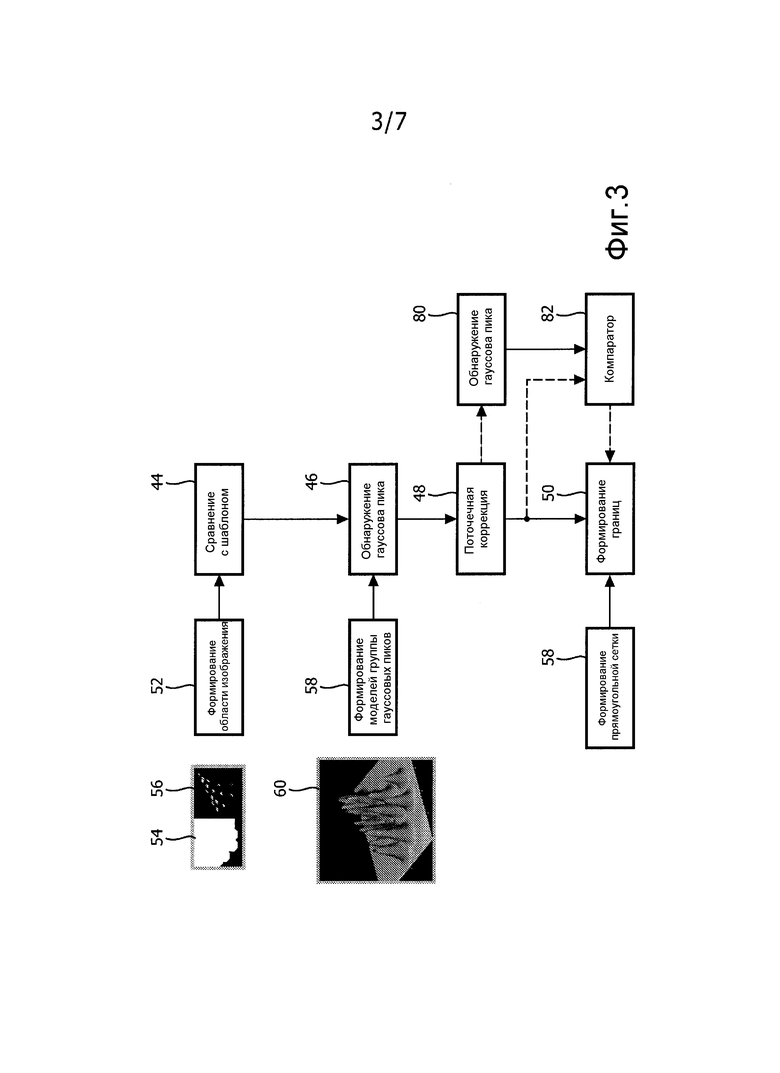
Фиг.3 - блок-схема последовательности операций способа идентификации положений кристаллов и границ в системах радионуклидной визуализации.
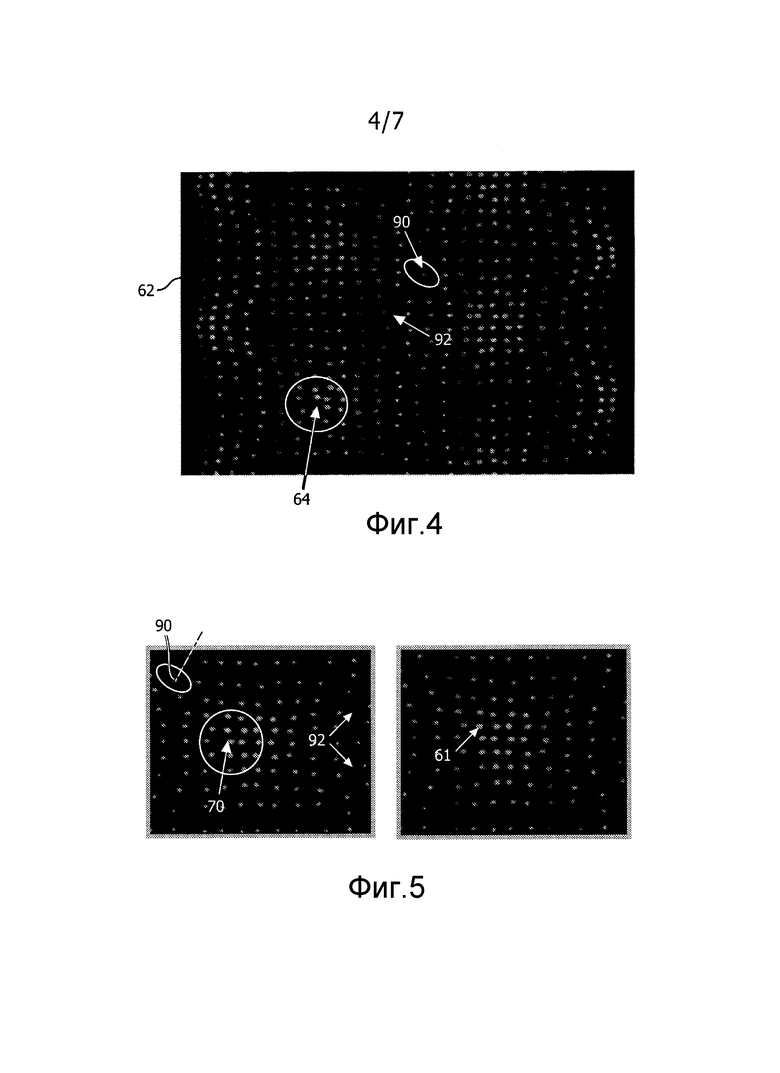
Фиг.4 - изображение моделей с положениями кристаллов, скорректированными по залитому изображению.
Фиг.5 - примеры соединенных пиков, разделенных пиков и границ ФЭУ (фотоэлектронных умножителей) в изображении моделей.
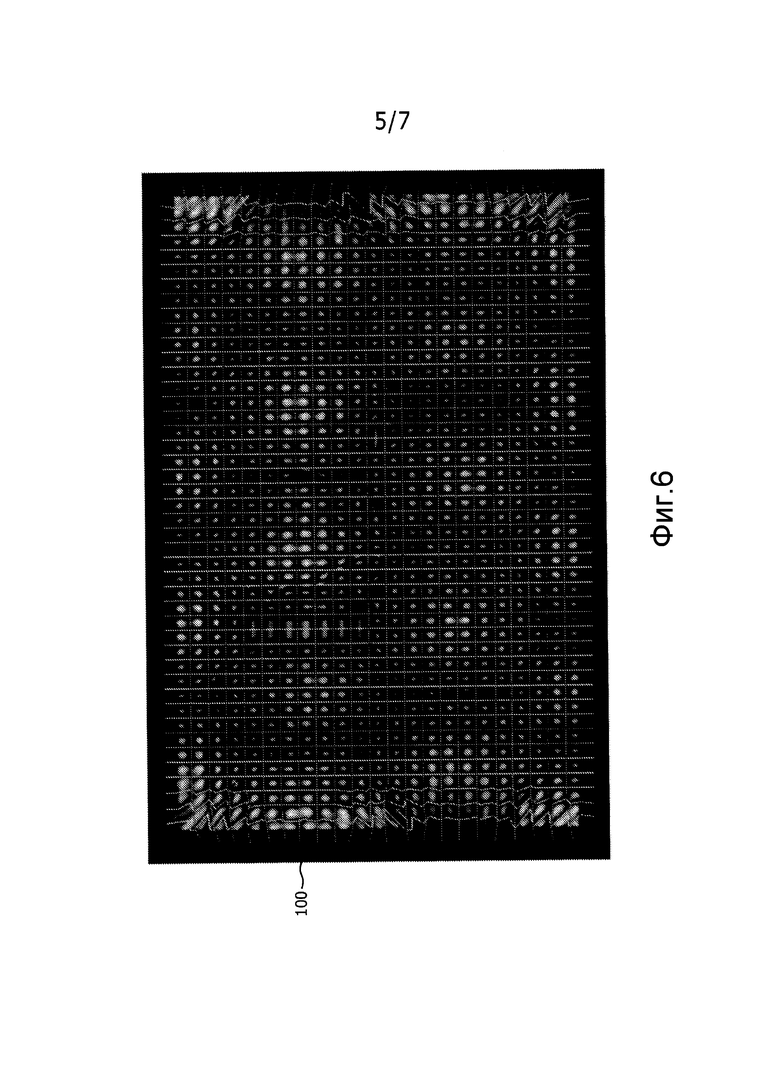
Фиг.6 - деформация прямоугольного пространства изображения моделей.
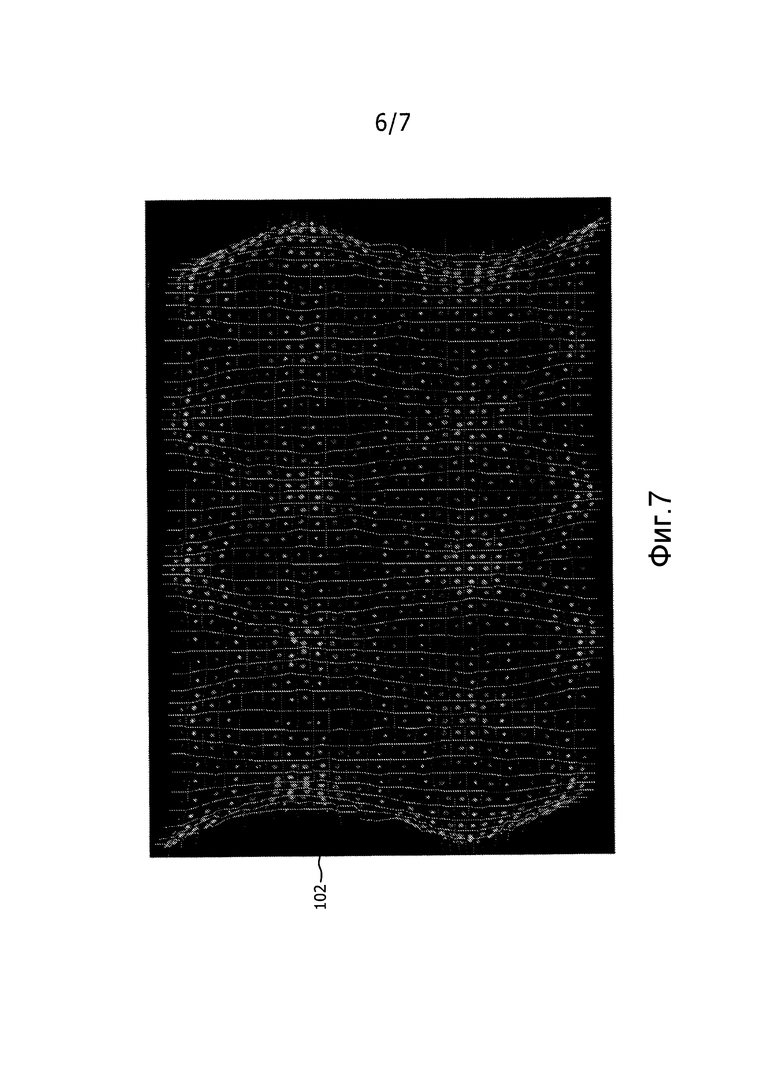
Фиг.7 - калибровочная карта с идентифицированными границами кристаллов.
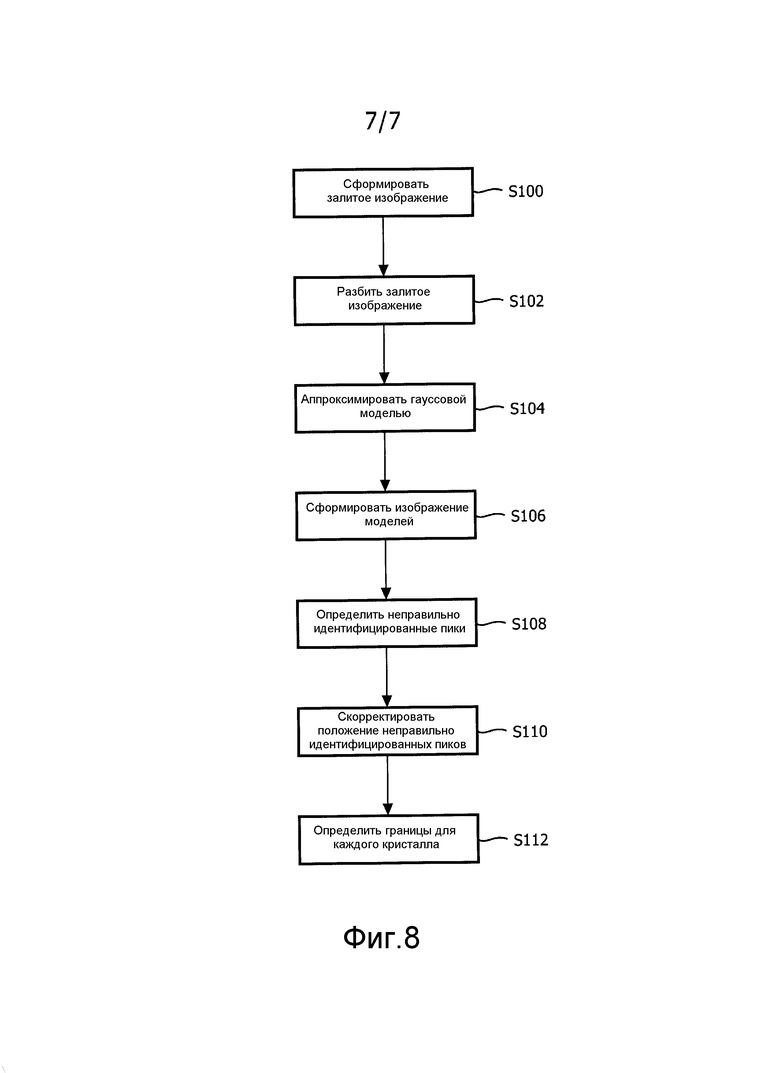
Фиг.8 - блок-схема последовательности операций способа определения границ кристаллов.
Как показано на фиг.1, система радионуклидной визуализации, например сканер ОФЭКТ (однофотонной эмиссионной компьютерной томографии), сканер ПЭТ (позитронной эмиссионной томографии) или томографический сканер 8, работающий с другим излучением, содержит множество детекторов 10 излучения, ориентированных для приема излучения из области 12 визуализации. На фиг.1 модули 10 детекторов излучения расположены в виде нескольких соседних колец вдоль осевого направления; однако, возможно использование других схем расположения модулей детекторов излучения. Кроме того, следует понимать, что на схеме показано множество модулей 10 детекторов излучения, расположенных в виде матрицы 11; матрица 11 детекторов излучения обычно установлена в корпусе 14 томографического сканера 8 и, следовательно, не видна снаружи. Каждый модуль 10 детекторов излучения содержит пиксельный сцинтилляционный слой и детектор излучения, например фотоэлектронный умножитель (ФЭУ) или подобное устройство, с оптическим контактным слоем, расположенным между ними. Томографический сканер 8 содержит опору 16 пациента для позиционирования пациента или человека в области 12 визуализации. При необходимости опора 16 является линейно подвижной в осевом направлении, в общем поперечно кольцам модулей 10 детекторов излучения, для облегчения сбора данных трехмерной визуализации по всему протяженному осевому расстоянию.
Во время процедуры визуализации пациенту на опоре 16 вводят радиофармацевтический препарат. События излучения обнаруживаются модулями 10 детекторов излучения. С каждым измеренным событием сцинтилляции сопоставляется временная метка посредством схемы 18 временных меток. В ПЭТ-сканере детектор 20 совпадений определяет совпадающие пары и линию ответа (LOR), определяемую каждой совпадающей парой. Реконструирующий процессор 22 реконструирует все LOR в виде представляемого изображения, которое хранится в памяти 24 изображений. В системе TOF-PET (времяпролетной ПЭТ), реконструирующий процессор вычисляет также времяпролетную информацию для каждой LOR из схемы 18 временных меток. Графический пользовательский интерфейс или устройство 26 отображения содержит устройство пользовательского ввода, которым врач может пользоваться для выбора последовательностей и протоколов сканирования, отображения данных изображения и т.п.
Вследствие несогласованности между отдельными сцинтилляционными кристаллами и между отдельными ФЭУ, например неточностей, неизбежных в процессе изготовления, каждую систему ПЭТ-визуализации калибруют для учета геометрических искажений, которые могут возникать из-за упомянутой несогласованности. Результаты обеспечивают сопоставление каждого калиброванного события излучения с положением сцинтилляционного кристалла, в котором фактически произошла сцинтилляция. Кроме того, вследствие характера алгоритмов реконструкции, например логических схем Ангера или подобных схем, применяемых в реконструирующем процессоре 22, распределение обнаруженных событий излучения на краях кольца детекторов излучения является сильно сжатым и значительно различается между отдельными детекторными модулями 10. ФЭУ стремятся сдвигать кажущееся положение сцинтилляционных событий к центру ФЭУ. После того как камера откалибрована, выходные сигналы из ФЭУ будут изменяться постепенно или дрейфовать со временем и в процессе использования. В конечном счете, дрейф исказит выходные данные настолько, что потребуется повторная калибровка системы. Начальная калибровка и периодические повторные калибровки могут требовать от потребителя больших затрат времени и средств. Система автоматической идентификации кристаллов может сократить время, затрачиваемое квалифицированным техническим специалистом на выполнение калибровки, с 8-10 часов до менее одного часа, с обеспечением значительной экономии как на трудозатратах, так и на времени простоя сканера.
Для калибровки ПЭТ-сканера 8 в область визуализации помещают точечный или линейный источник, чтобы модули 10 детекторов излучения были равномерно залиты событиями излучения. Когда данные заливки реконструируют, то получают залитое изображение 30, показанное, например, на фиг.2, которое является двумерным распределением положений по горизонтали и вертикали (например, в виде строк и столбцов) обнаруженных событий излучения. Каждый сцинтилляционный пик 32 на залитом изображении 30 соответствует отдельному сцинтилляционному кристаллу в пиксельном сцинтилляторе. Сформированное залитое изображение сохраняется в памяти 24 изображений, которая выбирается системой 40 идентификации кристаллов для дальнейшего анализа. Для сканеров со сплошным или блочным, а не пиксельным сцинтиллятором, на каждый детекторный модуль накладывают свинцовую пластину с прямоугольной матрицей апертур. Как показано на фиг.2, в залитом изображении квадратная сетка сцинтилляционных кристаллов (или апертуры шаблона) искажена.
Как показано на фиг.1, система 40 идентификации кристаллов (или апертур шаблона) содержит идентифицирующий процессор 42 или компьютерную подпрограмму, который(ая) обрабатывает залитое изображение (фиг.2, позиция 30), чтобы идентифицировать и определить положение изображения, соответствующее каждому отдельному сцинтилляционному кристаллу. Калибровочный процессор 43 или компьютерная подпрограмма корректирует геометрические искажения в полученных данных проекций на основании определенных положений изображения сцинтилляционных кристаллов. Идентифицирующий процессор 42 определяет исходное положение, т.е. строку и столбец, для каждого пика (фиг.2, позиция 32), которое корректируется до фактического положения сцинтилляционного кристалла или апертуры шаблона с использованием метода сравнения с шаблоном (фиг.3, позиция 44), метода аппроксимации гауссовой поверхностью (фиг.3, позиция 46) и поточечной коррекции (фиг.3, позиция 48). По скорректированным положениям каждого сцинтилляционного пика (фиг.2, позиция 32) формируют карту границ (фиг.3, позиция 50), которая идентифицирует границу каждого сцинтилляционного кристалла и используется для устранения геометрических искажений калибровочным процессором 43.
Как отмечено выше, каждый модуль ПЭТ-визуализации содержит приблизительно 10-30 ФЭУ, которые оптически связаны с несколькими сотнями или тысячами сцинтилляционных кристаллов. Поскольку каждый ФЭУ характеризуется отличающимся качеством изображения, то идентифицируют сцинтилляционные пики, которые соответствуют каждому отдельному ФЭУ. Идентифицирующий процессор 42 разбивает или делит залитое изображение 30 на области (шестиугольные на фиг.2), которые соответствуют каждому отдельному ФЭУ, использованием метода сравнения с шаблоном. В автономном режиме формируют базу 52 данных или библиотеку шаблонов и масок с использованием априорных данных, относящихся к параметрам предшествующей калибровки, известных характеристик ФЭУ и сцинтилляторов или подобной информации. Каждую область маскируют соответствующей маской и затем сравнивают с шаблонами базы данных шаблонов в соответствии с методом оптимизации, например минимизации методом наименьших квадратов или подобным методом. В изображенном варианте осуществления выделенный угол залитого изображения 30 умножается на маску 54, и полученная маскированная область, показанная под обозначением 56, подвергается оптимизации. В случае реализации метода наименьших квадратов идентифицирующий процессор 42 выполняет пару оптимизаций, показанных уравнениями 1 и 2:

где

f означает маскированную область, g означает шаблон, x означает пространство параметров деформации, i означает индекс шаблона, и θ означает набор поворотов. Первая (вложенная) оптимизация является минимизацией методом наименьших квадратов разности между маскированной областью f и индексированным шаблоном g. Область f поступательно смещается или сдвигается в соответствии с параметрами x0, y0 сдвига и растягивается или искривляется с коэффициентами lx1, lx2, ly1, ly2 масштабирования вдоль положительных и отрицательных x- и y-осей, соответственно. Вторая оптимизация является дискретной оптимизацией, которая поворачивает шаблоны в соответствии с коэффициентом θ поворота. Идентифицирующий процессор 42 выполняет итерации по всей библиотеке 52 шаблонов и выбирает наилучшее совпадение на основе оптимизаций. В качестве альтернативы, для экономии времени вычислений, идентифицирующий процессор 42 может выбрать первый шаблон, который находится в допустимом диапазоне. При этом задача состоит в определении параметров x деформации вместе с поворотом θ, которые используют для коррекции исходных положений пиков. Следует понимать, что предполагается также возможность использования других методов оптимизации и/или согласования.
Положения пиков дополнительно уточняют с использованием метода аппроксимации гауссовой поверхностью. Каждый сцинтилляционный пик в выбранной маскированной области 56 аппроксимируют моделью гауссовой поверхности. База данных моделей гауссовых пиков формируется на этапе 58 автономно и доступна идентифицирующему процессору 42. Идентифицирующий процессор 42 аппроксимирует по меньшей мере одной гауссовой моделью каждый сцинтилляционный пик 32 в скорректированном положении, полученном на этапе 44 сравнения с шаблоном. Аппроксимация выполняется с использованием метода оптимизации, такого как минимизация методом наименьших квадратов или подобным методом. Аппроксимирующие гауссовы модели совместно формируют представляемые изображения 60 поверхности маскированной области 56. Определяют локальный максимум или пик для каждой аппроксимирующей гауссовой модели, который заменяет текущие скорректированные положения с предыдущего этапа 44 сравнения с шаблоном. Результатом этапа обнаружения гауссова пика является изображение 62 моделей, представленное на фиг.4, которое состоит из отдельных изображений 60 поверхностей. В областях, в которых пики сильно сжаты, т.е. находятся в непосредственной близости друг к другу, исходная локализация пиков может привести к ложной идентификации двух или более пиков, которые перекрываются как один соединенный пик 64. Этап 46 обнаружения гауссова пика позволяет распознать упомянутые соединенные пики посредством сравнения распределения каждого пика с гауссовой моделью поверхности.
Как показано на фиг.3 и 5, этап 48 поточечной коррекции выполняется для каждого из скорректированных положений пиков, т.е. для положений, вычисленных на предыдущем этапе 46 обнаружения гауссова пика, чтобы определить пики, которые ошибочно назначены неверному сцинтилляционному кристаллу. Поскольку этап 44 сравнения с шаблоном не учитывает отдельные неправильные назначения сцинтилляционным кристаллам, то поточечная коррекция 48 просматривает все положения пиков для определения неправильно идентифицированных пиков, которые соответствуют иному, чем предполагается, сцинтилляционному кристаллу. Идентифицирующий процессор 42 использует координаты положения скорректированных пиков для измерения расстояния между соседними пиками. Если измеренное расстояние выбранного пика 70 находится в пределах общего или предварительно выбранного диапазона расстояний, т.е. не слишком близко, но и не слишком далеко от пика в прилегающих строке или столбце, то процессор 42 выполняет отсчеты локальной области 72 окружающих пиков и определяет среднее расстояние между соседними пиками в области. Если же проверяемое измеренное расстояние не находится в пределах допустимого диапазона, основанного на среднем расстоянии соседних пиков, тогда идентифицирующий процессор 42 определяет предполагаемое положение 74 по среднему расстоянию соседнего отсчета. В одном варианте осуществления идентифицирующий процессор 42 использует априорные данные, например среднее расстояние между пиками из ранее сохраненных калибровочных параметров, в дополнение к среднему расстоянию в области. Скорректированные положения пиков исправляют с использованием определенных предполагаемых положений 74. В другом варианте осуществления, после этапа 48 поточечной коррекции, повторяют этап 80 обнаружения гауссова пика, и результаты сравнивают на этапе 82, и наилучшие результаты используют для исправления скорректированных положений пиков, которые будут применены на последующем этапе 48 формирования границ.
В противоположность проблеме соединенных пиков 64 могут возникать разделенные пики 90, когда идентифицирующий процессор 42 ошибочно идентифицирует единственный пик как два отдельных пика, соответствующих отдельным сцинтилляционным кристаллам. Темные полосы, видные как в изображении 62 моделей, так и в залитом изображении 30, формируют шестиугольную картину, на которой каждый шестиугольник представляет зону визуализации одного модуля 10 детекторов. Между соседними ФЭУ формируется промежуточная зона 92, которая визуализируется в виде темных полос. Разделенные пики 90 возникают, когда два ФЭУ совместно используют один сцинтилляционный кристалл. Когда событие излучения обнаружено в промежуточной зоне, данное событие обнаруживается обоими ФЭУ 10, и, следовательно, формируются два пика, которые представляют одно и то же событие излучения. На этапе 48 поточечной коррекции идентифицируют каждый разделенный пик 90 на основании по меньшей мере одного из двух критериев: положения разделенного пика 90 относительно промежуточной зоны 92 и/или направления двух или более гауссовых моделей, которыми аппроксимируют разделенный пик 90 на этапе 46. Шаблон промежуточной зоны, который отображает положения промежуточных зон 92 ФЭУ, используют для пометки пиков, расположенных внутри или вблизи промежуточных зон 92. Если помеченный пик является разделенным пиком 90, то для идентификации положения соответствующего сцинтилляционного кристалла используют центральную точку, т.е. среднюю точку между пиками.
В данном случае все положения сцинтилляционных кристаллов определены и скорректированы идентифицирующим процессором 42. Скорректированные положения кристаллов аппроксимируют центроид, а не границы кристалла. Одни только положения центров сцинтилляционных кристаллов, представленные пиками, не обеспечивают достаточно степеней свободы для точного создания граничных линий вокруг каждого кристалла, без входа в прилегающий кристалл, особенно по краю кристаллов, где происходит сжатие. Для решения данной проблемы изображение 62 моделей отображают в прямоугольное пространство 90, при этом изображение моделей деформируют до равноудаленной системы прямоугольных координат, подобной показанной на фиг.6. Прямоугольное пространство является инвариантным относительно деформаций, и, следовательно, формы кристаллов являются приблизительно одинаковыми. Границы определяют в прямоугольном пространстве и затем отображают обратно в пространство изображения моделей с использованием преобразования, например нелинейного искривления или подобного преобразования, как показано на фиг.7, чтобы сформировать калибровочную карту 92. Калибровочную карту 92 используют для коррекции на геометрические искажения в данных проекций во время процедур визуализации, или упомянутая карта подлежит использованию в качестве априорных данных для будущих калибровочных процедур.
Способ для идентификации кристаллов, представленный на фиг.8, определяет положение изображения сцинтилляционных событий, соответствующих каждому отдельному сцинтилляционному кристаллу. Способ начинается с формирования залитого изображения 30 (S100) с использованием точечного или линейного источника, которое содержит двумерное распределение обнаруженных событий излучения. Сформированное залитое изображение 30 разбивают (S102) на множество областей с использованием метода сравнения с шаблоном. Каждая из областей соответствует одному из множества детекторов ядерного излучения, расположенных вокруг области 12 исследования. Чтобы дополнительно уточнить положения пиков, полученных на предыдущем этапе, каждый пик в выбранной маскированной области 56 аппроксимируют моделью гауссовой поверхности (S104). Определяют локальный пик каждого аппроксимированного пика и применяют для замены, т.е. представления, положений пиков, полученных на предыдущем этапе, которые затем используют для формирования изображения 62 моделей (S106). Выполняют поточечную коррекцию изображения 62 моделей для определения неправильно идентифицированных пиков (S108), т.е. пиков, неточно сопоставленных сцинтилляционному кристаллу, и для коррекции неправильно идентифицированных пиков (S110) в соответствии с одним из общих данных обо всех пиках и/или локальных данных о соседних пиках. По скорректированному изображению моделей определяют границы для каждого сцинтилляционного кристалла (S112). Границу располагают равноудаленно между соседними гауссовыми моделями из изображения моделей. По изображению границы можно калибровать систему радионуклидной визуализации.
Выше изобретение описано на примере предпочтительных вариантов осуществления. После прочтения и изучения вышеприведенного описания специалистами могут быть созданы модификации и внесены изменения. Предполагается, что изобретение следует интерпретировать как включающее в себя все упомянутые модификации и изменения в той степени, в которой они не выходят за пределы объема прилагаемой формулы изобретения или ее эквивалентов.
Изобретение относится к системе радионуклидной визуализации. Техническим результатом является повышение точности реконструкции изображения. Система радионуклидной визуализации содержит систему идентификации кристаллов, которая принимает залитое изображение, которое включает в себя множество пиков, при этом каждый пик является откликом на излучение, обнаруженное соответствующим сцинтилляционным кристаллом. Процессор идентификации кристаллов разбивает залитое изображение на множество областей, при этом каждую область маскируют для соответствия одному из матрицы детекторов ядерных излучений. Формируют изображение моделей, в котором по меньшей мере одна гауссова модель представляет идентифицированные пики. Определяют неправильно идентифицированные пики в изображении моделей, на котором положения пиков на залитом изображении отличаются от соответствующего сцинтилляционного кристалла, и корректируют положения неправильно идентифицированных пиков на залитом изображении. Калибровочный процессор корректирует геометрические искажения в полученных данных проекций по скорректированным пикам. 4 н. и 11 з.п. ф-лы, 8 ил.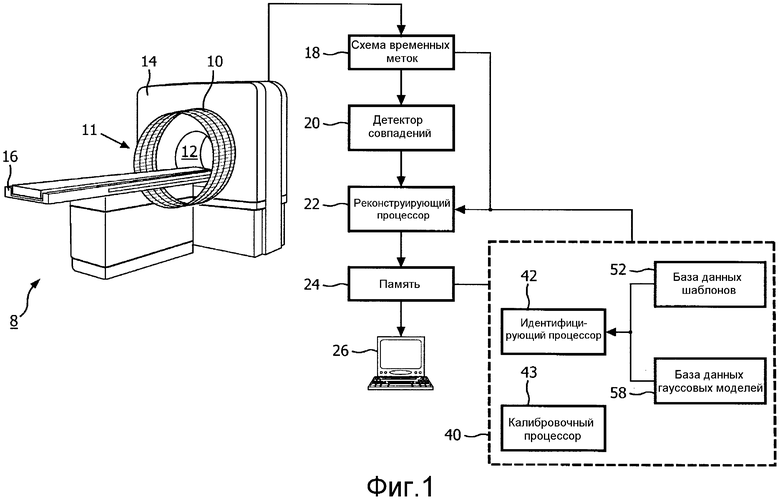
1. Способ идентификации кристаллов в системах радионуклидной визуализации, при этом способ содержит этапы, на которых:
формируют залитое изображение (30), которое содержит множество пиков, причем каждый пик является откликом на принятое излучение, при этом каждый пик соответствует соответствующему сцинтилляционному кристаллу;
разбивают залитое изображение на множество областей (56), причем каждую область маскируют для соответствия одному из матрицы детекторов ядерных излучений;
аппроксимируют каждый пик по меньшей мере одной гауссовой моделью;
формируют изображение (62) моделей, на котором аппроксимирующие гауссовы модели представляют идентифицированные пики;
определяют неправильно идентифицированные пики на изображении (62) моделей, на котором положения пиков в залитом изображении (30) отличаются от соответствующего сцинтилляционного кристалла; и
корректируют положение неправильно идентифицированных пиков в залитом изображении (30) на основании по меньшей мере одного из (i) общих данных обо всех пиках и (ii) локальных данных о соседних пиках в изображении моделей.
2. Способ по п.1, в котором локальный максимум каждой аппроксимирующей гауссовой модели определяет положение соответствующего сцинтилляционного кристалла.
3. Способ по п.1, дополнительно включающий в себя этап, на котором:
корректируют положения пиков в залитом изображении (30) согласно фактическому положению сцинтилляционных кристаллов.
4. Способ по п.3, дополнительно включающий в себя этап, на котором:
определяют набор параметров деформации для каждой области разбиения посредством сопоставления области разбиения с шаблоном.
5. Способ по п.4, дополнительно включающий в себя этап, на котором:
определяют границы для каждого сцинтилляционного кристалла на основании соответствующего скорректированного положения и локального минимума, равноудаленно расположенного между соседними гауссовыми моделями на изображении моделей.
6. Способ по любому из пп.3-5, в котором этап определения неправильно идентифицированных пиков в изображении моделей включает в себя этапы, на которых:
идентифицируют разделенные точки на изображении моделей, которые возникают в промежуточной зоне между двумя соседними датчиками ядерного излучения или вблизи нее, при этом разделенная точка возникает, когда два или более датчиков ядерного излучения обнаруживают одно и то же событие излучения, приводящее к возникновению двух или более пиков в непосредственной близости друг к другу, соответствующих одному и тому же сцинтилляционному кристаллу; и
обновляют положение локального минимума, равноудаленного между неразделенным центром и ближайшим центром разделенных точек для одного и того же сцинтилляционного кристалла.
7. Способ по п.1, в котором этап определения неправильно идентифицированных пиков включает в себя этапы, на которых:
вычисляют расстояние между положениями соседних моделей гауссовой поверхности в каждой области разбиения;
сравнивают расстояния с общим средним расстоянием между всеми соседними пиками и/или локальным средним расстоянием соседних моделей гауссовой поверхности;
помечают модель гауссовой поверхности как идентифицированную неправильно, если по меньшей мере одно расстояние между соседними моделями не удовлетворяет критерию общего среднего и/или критерию локального среднего.
8. Способ по любому из пп.4 и 5, в котором этап определения набора параметров деформации для каждой области разбиения включает в себя этапы, на которых:
формируют базу данных шаблонов;
итерационно искривляют каждую область по двум измерениям, чтобы определить коэффициент сдвига, коэффициент масштабирования и коэффициент поворота, пока искривленная область не будет соответствовать по меньшей мере одному из шаблонов из базы данных шаблонов в соответствии с оптимизацией методом наименьших квадратов; и
при этом коэффициент сдвига, коэффициент масштабирования, коэффициент поворота и сопоставленный шаблон совместно определяют набор параметров деформации.
9. Способ по п.5, в котором этап определения границ для каждого сцинтилляционного кристалла включает в себя этапы, на которых:
отображают скорректированные положения и соответствующие гауссовы модели в изображении моделей из пространства изображения в шаблон, такой как прямоугольное пространство, инвариантное относительно деформации;
определяют границы каждого сцинтиллятора на основании отображенных гауссовых моделей на шаблоне; и
отображают шаблон и определенные границы обратно в пространство изображения.
10. Способ радионуклидной визуализации, содержащий этапы, на которых:
вводят радиофармацевтический препарат субъекту, помещенному в область исследования системы радионуклидной визуализации;
обнаруживают пары совпадающих событий излучения, порождаемых введенным радиофармацевтическим препаратом, и определяют данные проекций, соответствующие совпадающим парам;
корректируют геометрические искажения в полученных данных проекций с использованием определенных границ по п.5; и
реконструируют скорректированные данные проекций в представляемое изображение.
11. Система (40) идентификации кристаллов, содержащая:
память (24) изображений, которая принимает залитое изображение (30), которое содержит множество пиков, при этом каждый пик является откликом на излучение, обнаруженное соответствующим сцинтилляционным кристаллом;
процессор (42) идентификации кристаллов, выполненный с возможностью выполнения этапов, на которых:
разбивают залитое изображение (30) на множество областей (56), причем каждую область маскируют для соответствия одному из матрицы детекторов ядерных излучений;
аппроксимируют каждый пик по меньшей мере одной гауссовой моделью;
формируют изображение (62) моделей, в котором аппроксимирующие гауссовы модели представляют идентифицированные пики;
определяют неправильно идентифицированные пики на изображении (62) моделей, на котором положения пиков в залитом изображении (30) отличаются от соответствующего сцинтилляционного кристалла; и
корректируют положение неправильно идентифицированных пиков на залитом изображении (30) на основании общих данных обо всех пиках и локальных данных о соседних пиках в изображении моделей.
12. Система идентификации кристаллов по п.11, в которой локальный максимум для каждой аппроксимирующей гауссовой модели определяет положение соответствующего сцинтилляционного кристалла.
13. Система идентификации кристаллов по любому из пп.11 и 12, в которой процессор для идентификации кристаллов дополнительно выполнен с возможностью выполнения этапа, на котором:
корректируют положение пиков на залитом изображении (30) согласно фактическому положению сцинтилляционных кристаллов.
14. Система идентификации кристаллов по п.13, в которой процессор для идентификации кристаллов дополнительно выполнен с возможностью выполнения этапа, на котором:
определяют набор параметров деформации для каждой области разбиения посредством сопоставления области разбиения с шаблоном.
15. Система (10) радионуклидной визуализации, содержащая:
матрицу детекторов (10) излучения, ориентированных вокруг области (12) исследования для приема излучения от радиофармацевтического препарата, введенного субъекту;
детектор (52) совпадений, который обнаруживает пары обнаруженных событий излучения и определяет данные проекций, соответствующие совпадающим парам;
систему (40) идентификации кристаллов, которая включает в себя процессор (42) идентификации кристаллов, выполненный с возможностью выполнения этапов, на которых:
разбивают залитое изображение (30) на множество областей (56), при этом каждую область маскируют для соответствия одному из матрицы детекторов ядерных излучений;
аппроксимируют каждый пик по меньшей мере одной гауссовой моделью;
формируют изображение (62) моделей, в котором аппроксимирующие гауссовы модели представляют идентифицированные пики;
определяют неправильно идентифицированные пики в изображении (62) моделей, на котором положения пиков на залитом изображении (30) отличаются от соответствующего сцинтилляционного кристалла; и
корректируют положение неправильно идентифицированных пиков на залитом изображении (30) на основании общих данных обо всех пиках и локальных данных о соседних пиках на изображении моделей;
определяют границы для каждого сцинтилляционного кристалла на основании соответствующего скорректированного положения и локального минимума, равноудаленного между соседними гауссовыми моделями на изображении моделей;
калибровочный процессор (43), который корректирует геометрические искажения в полученных данных проекций с использованием определенных границ; и
реконструирующий процессор (22), который реконструирует скорректированные данные проекций в виде представляемого изображения.
| KELLY A | |||
| STRONGER et al | |||
| "OPTIMAL CALIBRATION OF PET CRYSTAL POSITION MAPS USING GAUSSIAN MIXTURE MODELS" IEEE TRANSACTIONS ON NUCLEAR SCIENCE, VOL | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| ABHIJIT J CHAUDHARI et al | |||
| "CRYSTAL IDENTIFICATION IN POSITRON EMISSION TOMOGRAPHY USING NONRIGID REGISTRATION TO A FOURIER-BASED TEMPLATE", IOP PUBLISHING, PHYS | |||
| MED. | |||

