Предлагаемое изобретение относится к испытательной технике и может быть использовано при экспериментальной отработке изделий в лабораторных условиях.
Аналогом предлагаемого изобретения является способ задания испытательного воздействия посредством эталонных ударных импульсов, рекомендованных Международной электротехнической комиссией (см. справочник «Вибрации в технике» т. 5, стр. 481-482, изд. «Машиностроение», М., 1981). Такой способ реально осуществлен в компьютерных системах управления виброиспытаниями (в частности VR8500 и Dactron Laser).
Применение при ударных испытаниях эталонных импульсов подвижная часть вибростенда (а, следовательно, и закрепленное на стенде изделие), находившаяся до удара в состоянии покоя, после удара приобретает остаточную скорость. Если эту скорость не погасить, то подвижная часть стенда будет двигаться до упора. В результате возникнет непредусмотренный вторичный удар, способный привести к поломке стенда и изделия. Чтобы этого не произошло, в системах управления программно предусматривается гашение остаточной скорости. Достижение этого эффекта возможно лишь при выполнении ряда условий, обеспечивающих предварительный разгон подвижной части стенда перед формированием собственно удара и ее торможение после того, как удар уже произведен. Это усложняет работу системы управления. Большинство электродинамических вибростендов имеют свободный ход не более 50 мм, и поэтому они пригодны для воспроизведения импульсов длительностью не более несольких миллисекунд.
Аналогом-прототипом предлагаемого изобретения является «Система воспроизведения удара с применением третьоктавного фильтра» (см. «Mechanical Vibration and Shock Measurements». Bruel & Kjaer, 1980, стр. 259-260).
Практически испытание на виброудар выполняется в виде последовательно включенных импульсного генератора и узкополосного фильтра, а также ряда элементов, обеспечивающих формирование на входе усилителя слаботочного сигнала колебательной формы. Устройство подобного принципа действия рассмотрено также в авторском свидетельстве N 519847 МКИ НОЗК 3/80.
Указанное устройство предназначено для воспроизведения виброударных импульсов с регулированием начальной фазы и длительности формируемого сигнала. Однако его реальное применение для создания однократного или периодически следующего силового воздействия, представляющего собой апериодическое колебание невозможно из-за отсутствия в составе указанного устройства средств оценки величины остаточной скорости движения стенда.
Задачей предлагаемого изобретения является создание способа виброударных испытаний на электрически управляемых вибростендах, при которых формируемое силовое воздействие регулируется в широких предела по основным параметрам, при этом система управления обеспечивает устранение последствия в виде остаточной скорости подвижного элемента.
Сущность предлагаемого изобретения состоит в том, что в способе задания виброударов процессов при их воспроизведении электрически управляемыми стендами осуществляется формирование управление работой стенда с учетом контролируемого минимума остаточной скорости подвижной платформы стенда. При этом скорость определяется интегрированием выходного сигнала виброизмерителя, выраженного в единицах виброускорения.
При этом указанный управляющий сигнал формируют стробированием исходного синусоидального колебания, затухающего по экспоненте.
Техническим результатом предлагаемого изобретения является возможность воспроизведения на электродинамических стендах виброудара, регулируемого в пределах, обеспечивающих заданный режим испытаний, при этом форма виброудара близка к полусинусоиде.
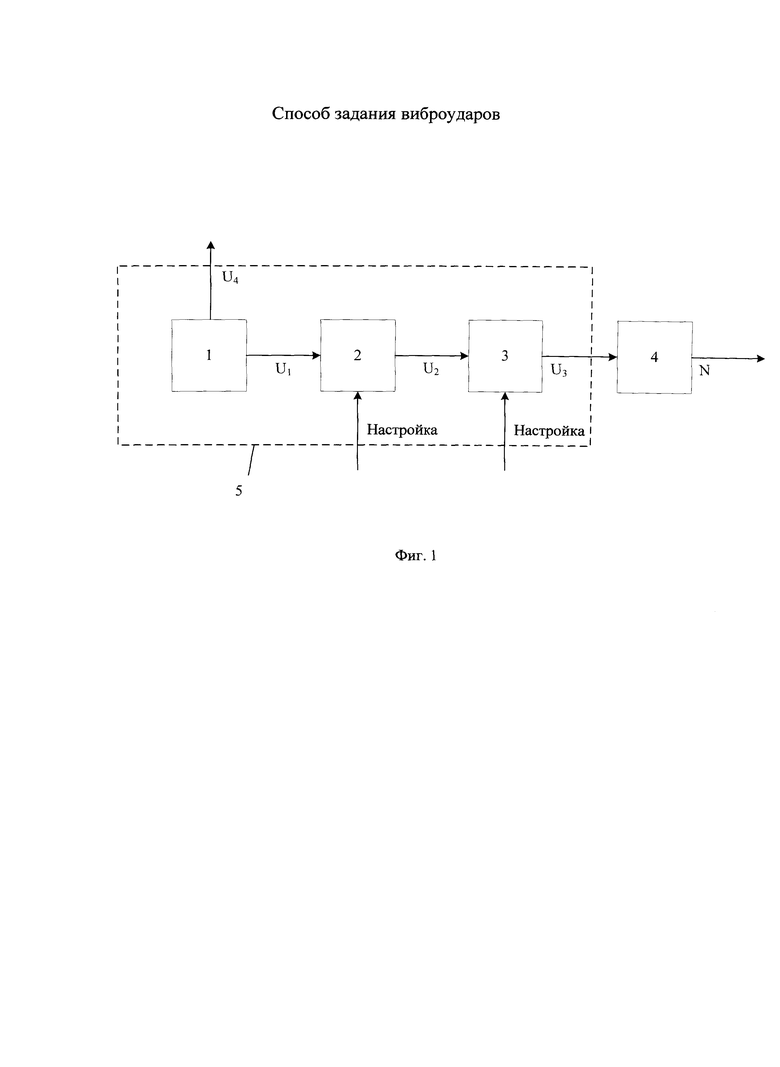
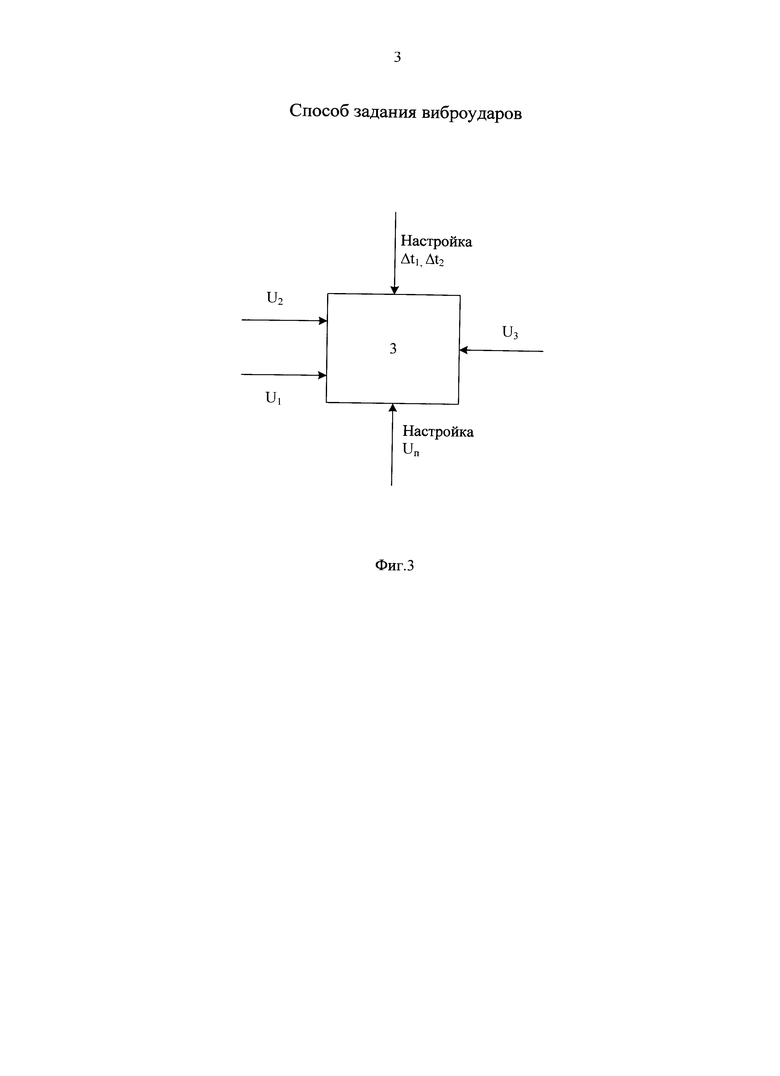
На фиг. 1-3 показана блок-схема осуществления заявленного способа воспроизведения виброударов. При этом на блок-схеме фиг. 1 показаны связи системы управления 5 с агрегатным комплексом 4 силового оборудования, а на блок-схеме фиг. 2 изображен виброизмерительный канал 6 и его связи с аппаратурой 10 регистрации и обработки сигналов. На фиг. 3 показаны с уточнением связи и операции настройки одного из элементов системы управления, конкретно блока 3 стробирования.
Осциллограммы основных рабочих сигналов и результаты аппаратурной обработки виброудара показаны на фиг. 1-5 Приложения.
Блок-схема фиг. 1 содержит в своем составе следующие аппаратурные устройства:
- импульсный генератор 1;
- узкополосный (частотно-избирательный) фильтр 2;
- блок 3 стробирования;
- агрегатный силовой комплекс 4, содержащий последовательно соединенные усилитель мощности и электродинамический вибростенд.
Первый выход импульсного генератора 1 подключен к входу узкополосного фильтра 2 и к управляемому входу блока 3 стробирования. Второй выход импульсного генератора 1 подключен к синхронизирующему входу аппаратуры 10 регистрации и обработки (см. фиг. 2). Выход узкополосного фильтра 2 соединен с сигнальным входом блока 3 стробирования. Выход блока 3 стробирования соединен с входом силового агрегата 4, конкретно - с входом усилителя мощности, входящего в состав агрегата 4. Все элементы блок-схемы фиг. 1 образует единую систему 5 управления.
Блок-схема фиг. 2 объединяет в своем составе виброизмерительный канал 6, содержащий пьезоакселерометр 7, согласующий измерительный усилитель 8 и интегрирующий усилитель 9, и аппаратуру 10 регистрации и обработки сигналов. При этом пьезоакселерометр 7, согласующий усилитель 8 и интегрирующий усилитель 9 соединены между собой последовательно, выход согласующего усилителя 8 подключен к входу первого канала регистрирующей аппаратуры 10, а вход интегрирующего усилителя 9 соединен с входом второго канала аппаратуры 10.
Взаимодействие элементов блок-схем фиг. 1 и 2 происходит следующим образом.
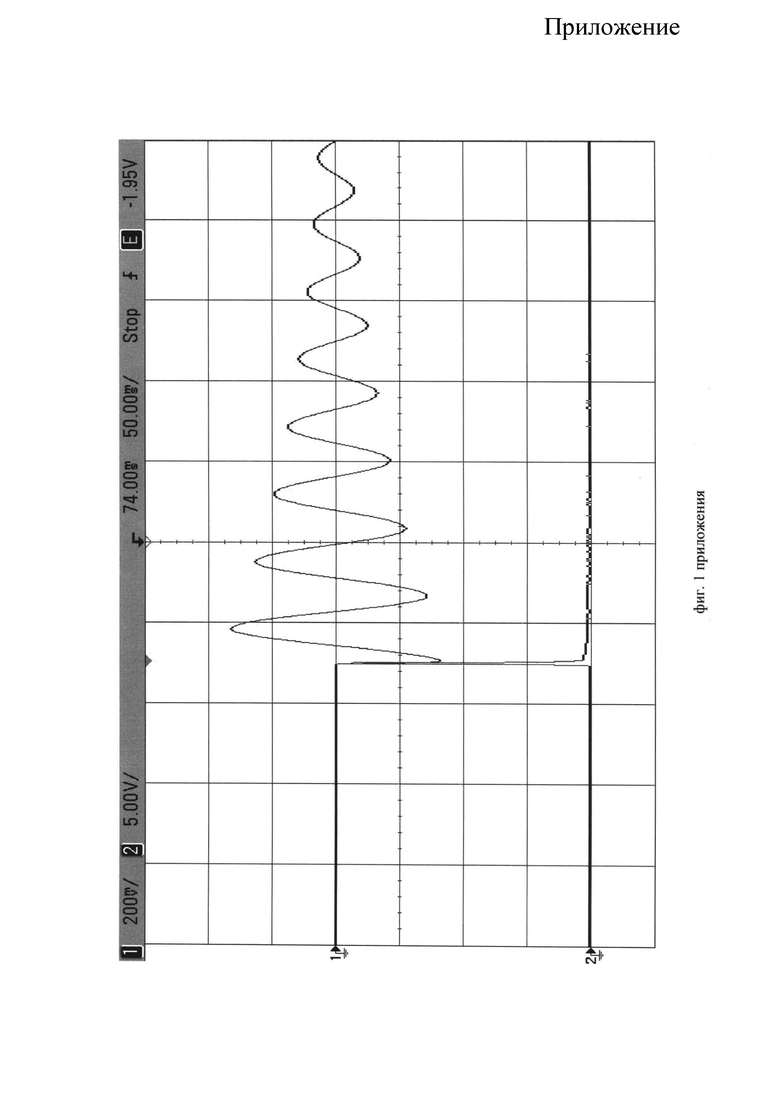
Сигнал U1 в виде однократного или периодически следующего импульса с первого выхода импульсного генератора 1 поступает на вход узкополосного фильтра 2 и на управляемый вход блока 3 стробирования. Импульс U1 имеет прямоугольную форму и длительность около 1 мс. Воздействие импульса U1 приводит к возникновению на входе фильтра 2 затухающего по экспоненте синусоидального напряжения U2, представляющего собой импульсную переходную функцию фильтра 2. При этом частота сигнала U2 определится настройкой фильтра 2, выполняемой визуально по шкале фильтра. Облик сигналов U1 и U2 показан на осциллограммах фиг. 1 Приложения.
Сигнал U2 с выхода фильтра 2 поступает на вход блока 3 стробирования, на управляемый вход которого с первого выхода импульсного генератора 1 передается импульс U1. Органами настройки блока 3 создается требуемая начальная фаза и длительность сигнала U3 на выходе блока 3.
Сигналы U1 и U3 во временной области показаны на фиг. 2 Приложения. Начальная фаза и длительность сигнала U3 показаны соответственно временными промежутками Δt1 и Δt2.
Кроме того, сигнал U3 регулируется по уровню постоянной составляющей Uп. Облик сигнала U3 с измененным уровнем Uп показан на фиг. 3 Приложения.
Сигнал U3 с выхода блока стробирования поступает на вход усилителя мощности, а с выхода последнего - на электродинамический вибростенд. Последний преобразует электрический сигнал U3 в механическое силовое воздействие N, представляющее виброудар. Заданное значение виброудара N по амплитуде и корректировка по параметрам Δt1 и Δt2 производятся при малой амплитуде виброудара.
Виброудар N воздействует на пьезоакселерометр 7 (см. блок-схему фиг. 2), который преобразует механический удар в электрический сигнал U5, который измерительным усилителем 8 преобразуется в сигнал U6, поступающий на вход первого канала аппаратуры 10 регистрации и обработки. Кроме того, сигнал U6 передается на вход интегрирующего усилителя 9. Поскольку сигнал U6 в физическом смысле представляет виброускорение, то на выходе интегрирующего усилителя 9 получается сигнал U7, непосредственно пропорциональный скорости сформированного системой виброудара. Сигнал U7 передается на вход второго канала аппаратуры 10. Таким образом, обеспечивается одновременная регистрация виброудара как по ускорению, так и по скорости.
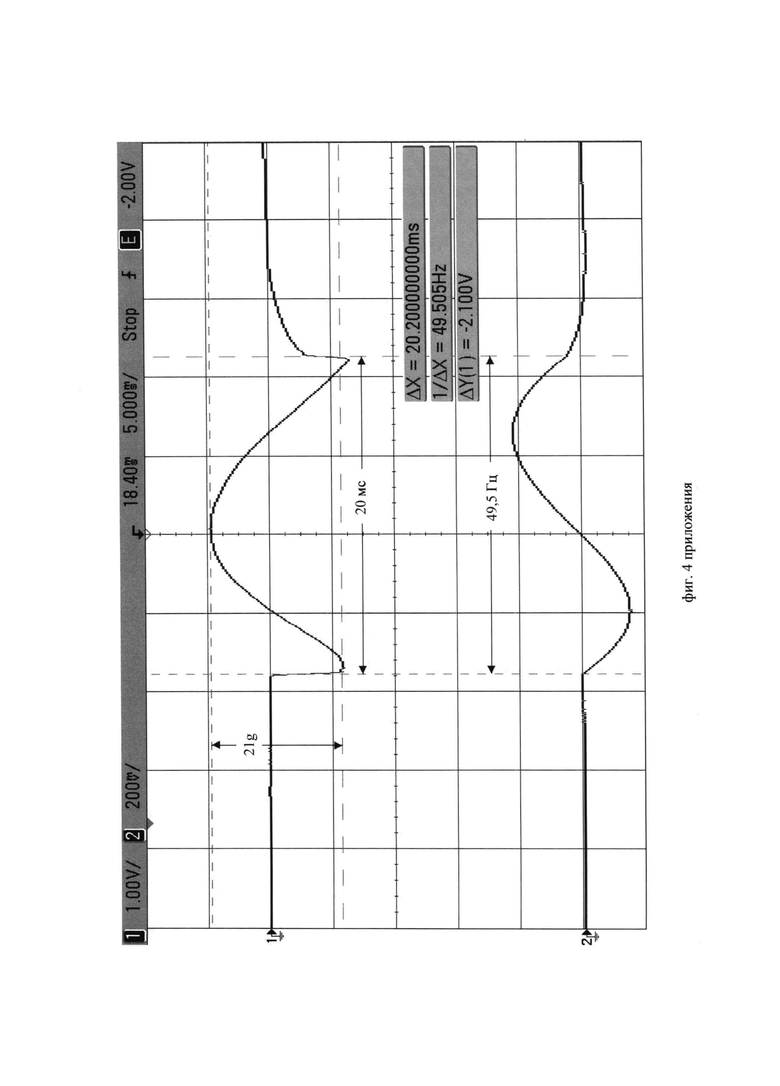
Характер полученных при подобной работе систем согласно блок-схем фиг. 1 и 2 показан на фиг. 4 Приложения. При этом верхняя осциллограмма представляет импульс виброускорения, а нижняя - виброскорость. Как видно из осциллограммы ускорения, виброудар с заданными значениями фазы и длительности имеет смещение вниз относительно горизонтали примерно на 50%. Этим обеспечивается полное погашение остаточной скорости движения подвижной платформы стенда. Сравнительный характер осциллограмм ускорения и скорости зарегистрированного виброудара отличается четкой согласованностью. В частности, максимуму ускорения соответствует нулевая величина скорости, а экстремум скорости совпадает с нулевыми значениеми ускорения.
Кроме измерения амплитуды и длительности виброудара аппаратура 10 регистрации и обработки сигналов производит операции математической обработки, в частности быстрое преобразование Фурье. На фиг. 5 Приложения верхний график показывает в логарифмическом масштабе быстрое преобразование Фурье виброудара ускорения (второй график сверху).
В осуществленном варианте предлагаемого изобретения применены следующие аппаратурные устройства:
- в качестве импульсного генератора 1 - генератор Г5-54;
- в качестве фильтра 2 - узкополосный фильтр 01013 (Robotron, Германия);
- в качестве блока 3 стробирования - ограничитель длительности сигналов 2972 (Bruel & Kjaer, Дания);
- в качестве агрегата 4 силового оборудования - система VR 8500(США);
- в качестве пьезоакселерометра 7 - датчик виброускорения KD - 35 (Германия, VEB Metra Mess - Und Frequenztechnik, Radebeul);
- в качестве усилителей 8 и 9 - согласующий предусилитель 00028 (Robotron, Германия);
- в качестве аппаратуры 10 регистрации и обработки - цифровой осциллограф DSO 6012А (Agilent Technologies).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОСПРОИЗВЕДЕНИЯ НЕСТАЦИОНАРНЫХ СЛУЧАЙНЫХ ПРОЦЕССОВ | 2010 |
|
RU2451272C1 |
| СИСТЕМА ОБРАБОТКИ СИГНАЛОВ | 2011 |
|
RU2498258C2 |
| Способ фильтрации нестационарных сигналов | 2017 |
|
RU2653584C1 |
| СИСТЕМА ОБРАБОТКИ СИГНАЛОВ | 2006 |
|
RU2326359C1 |
| СПОСОБ ВЫДЕЛЕНИЯ НЕСТАЦИОНАРНОГО СИГНАЛА | 2009 |
|
RU2428670C1 |
| Многофункциональное устройство для вибрационных испытаний конструкций | 1983 |
|
SU1133490A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРОСТЕНД | 2014 |
|
RU2572070C1 |
| Генератор виброударных возмущений для электродинамических стендов | 1984 |
|
SU1257422A1 |
| Устройство для управления виброиспытаниями | 1985 |
|
SU1267377A1 |
| СПОСОБ ИСПЫТАНИЙ ОБЪЕКТОВ НА ВИБРОУДАРНЫЕ НАГРУЗКИ | 2021 |
|
RU2775377C1 |




Заявленное изобретение относится к испытательной технике и может быть использовано при экспериментальной обработке изделий в лабораторных условиях. Сущность способа заключается в воспроизведении виброударных процессов на электрически управляемых вибростендах, характеризующихся формированием управляющего сигнала в виде временного отрезка импульсной переходной функции, получаемого путем управления начальной фазой и длительностью, причем указанное управление по сути представляет стробирование указанного управляющего сигнала, кроме того формирование указанного управляющего сигнала осуществляют с регулировкой уровня постоянной составляющей задаваемого сигнала. Технический результат заключается в возможности воспроизведения виброудара, регулируемого в пределах, обеспечивающих заданный режим испытаний. 1 з.п. ф-лы, 8 ил. 
1. Способ задания виброударов, основанный на воспроизведении виброударных процессов на электрически управляемых вибростендах, характеризующийся формированием управляющего сигнала в виде временного отрезка импульсной переходной функции, получаемого путем управления начальной фазой и длительностью, причем указанное управление, по сути, представляет стробирование указанного управляющего сигнала, кроме того, формирование указанного управляющего сигнала осуществляют с регулировкой уровня постоянной составляющей задаваемого сигнала.
2. Способ по п. 1, отличающийся тем, что посредством указанных регулировок контролируют минимум остаточной скорости подвижной платформы.
| Генератор серий колебаний синусоидальной формы | 1975 |
|
SU519847A1 |
| Программно-управляемый генератор синусоидальных колебаний | 1986 |
|
SU1460768A1 |
| "Mechanical Vibration and Shock Measurements | |||
| Bruel & Kjaer, 1980, стр | |||
| Арматура для железобетонных свай и стоек | 1916 |
|
SU259A1 |

