Предлагаемое изобретение относится к области испытательной техники и может быть использовано при аппаратурном анализе динамических процессов.
Аналогом предлагаемого изобретения является способ обнаружения и обработки сложных сигналов [1], в котором применяется оператор обработки, позволяющий получить наибольшее отношение сигнал/шум на выходе схемы обработки при фиксированном отношении сигнал/шум на входе. При этом используют оператор интегрирования следующего вида:
где Z(t) - принятый сигнал в составе полезного сигнала и аддитивной помехи,
S(t) - передаваемый сигнал,
Т - длительность сигнала,
X(t) - неизвестный сигнал, который требуется обнаружить и определить.
Параметр EZX по физическому смыслу представляет собой взаимную энергию сигналов S(t) и X(t). После того как сигнал обнаружен, исходная реализация подвергается оптимальной линейной фильтрации, результатом которой является восстановление первоначальной формы полезного сигнала или определение его параметра.
Фильтры, выполняющие оптимальную линейную фильтрацию по критерию максимума отношения сигнал/шум, называются согласованными [2-4].
Практическая реализация способа обнаружения и фильтрации на основе материалов из указанных литературных источников затруднительна, так как литература содержит более всего сведения теоретического характера. Примеров практического осуществления способа и соответствующих устройств конкретной аппаратуры (в том числе серийного производства) также нет.
Аналогом-прототипом предлагаемого изобретения является «Способ фильтрации сигналов произвольной формы», описание которого изложено в патенте N2530211.
Данный способ выполняется посредством корреляционного приема сигналов, предварительно зарегистрированных на носитель, с последующим выделением составляющей полезного сигнала. При этом поиск полезного сигнала производится одновременно с запоминаниями мгновенных значений корреляционной функции и спектральной плотности. Это позволяет выявить отличия корреляционных и спектральных функций от признаков стационарного сигнала. При этом производится оценка амплитудно-частотного диапазона полезного сигнала. Указанная оценка используется при настройке фильтра, на вход которого поступает реализация исследуемого процесса.
Способ фильтрации в соответствии с прототипом не позволяет установить временные границы полезного сигнала. Это создает дополнительные погрешности в результате аппаратурной обработки исследуемых процессов, содержащих нестационарные составляющие (в частности, виброудара, сопровождающегося широкополосной случайной вибрацией).
Кроме того, осуществление способа в соответствии с прототипом требует применения корреляционного анализа как признака присутствия (или отсутствия) полезного сигнала. Это усложняет задачу обработки сложных динамических процессов.
Сущность предлагаемого изобретения состоит в том, что в способе фильтрации электрических сигналов, представляющих реализации исследуемых динамических процессов, выделение полезного сигнала в смеси с широкополосным стационарным шумом осуществляется посредством однократного или двойного интегрирования реализации исследуемого процесса. В результате на выходе схемы интегрирования создается сигнал, который параметрически указывает на присутствие нестационарной составляющей в составе исследуемого процесса. Сигнал с выхода схемы интегрирования передается на вход устройства, которое на своем выходе создает напряжение в виде прямоугольного импульса, причем передний фронт данного импульса формируется с упреждением относительно сигнала на выходе схемы интегрирования. Указанное напряжение управляет работой фильтра, полоса прозрачности которого пропорциональна амплитуде импульса [5]. Длительность сигнала на выходе фильтра равна длительности импульса. Таким образом, фильтрация исследуемого сигнала выполняется одновременно с операцией стробирования и в конечном итоге на выходе фильтра формируется реализация как в полосе прозрачности фильтра, так и в заданных временных границах.
Техническим результатом предлагаемого изобретения является возможность выделения полезного сигнала (например, виброударного процесса), сопровождающегося широкополосным стационарным процессом, и последующего определения характеристик полезного сигнала.
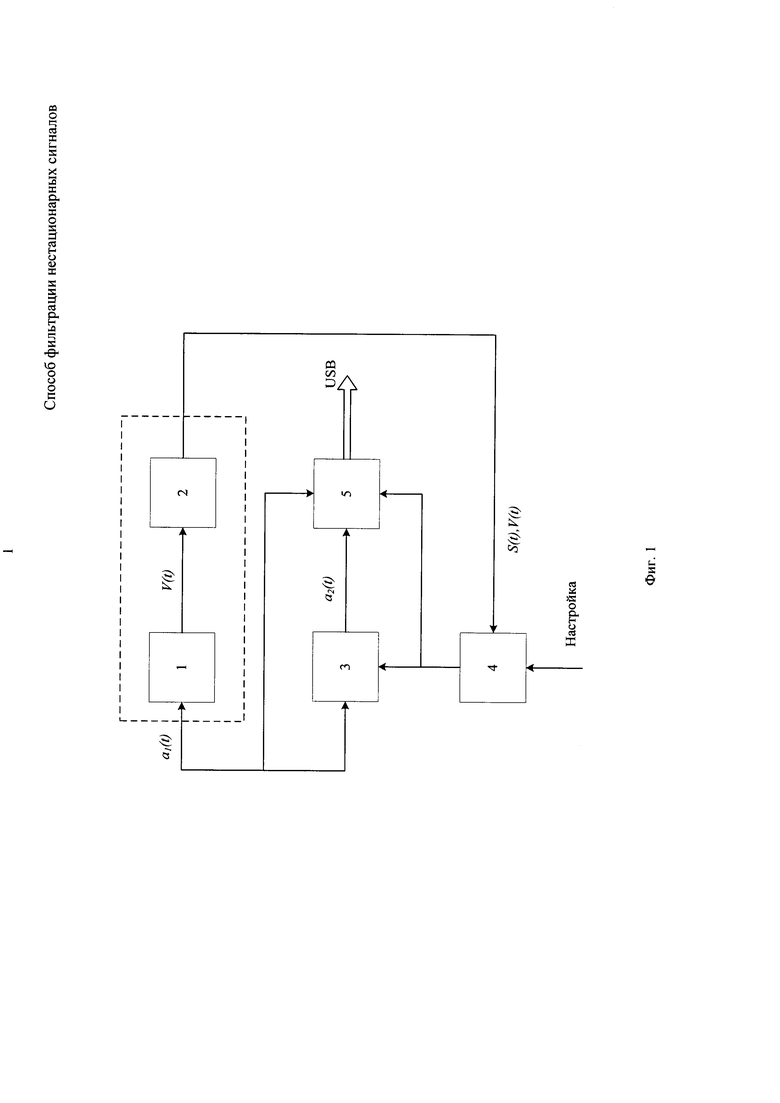
На фиг. 1 показана блок-схема осуществления заявленного способа фильтрации.
Осциллограммы рабочих сигналов и результаты обработки исследуемых процессов показаны на фиг. 2-6. Приложения.
Блок-схема фиг. 1 содержит в своем составе следующие аппаратурные устройства:
- интегрирующие усилители 1 и 2;
- перестраиваемый по частоте фильтр 3;
- управляющее устройство 4;
- блок 5 реализации и обработки.
Вход интегрирующего усилителя 1 по существу представляет собой вход блок-схемы, а его выход соединен с входом интегрирующего усилителя 2. С выходом интегрирующего усилителя 1 соединен также вход фильтра 3 и один из входов блока 5 регистрации и обработки.
Выход интегрирующего усилителя 2 соединен с пусковым входом управляющего устройства 4, выход которого подключен к управляемому входу фильтра 3 и к входу синхронизации блока 5 регистрации и обработки. Выход фильтра 3 соединен со вторым входом блока 5 регистрации и обработки.
Рабочее взаимодействие элементов блок-схемы фиг. 1 при обработке сигналов виброизмерительной системы происходит следующим образом.
Сигнал a1(t) в размерности виброускорения поступает на входы интегрирующего усилителя 1, фильтра 3 и на первый вход блока 5 регистрации и обработки. Сигнал на выходе интегрирующего усилителя 1 имеет размерность скорости V(t). Если усилитель 2 работает в режиме интегрирования, то его выходной сигнал имеет размерность вибрационного перемещения S(t). Кроме того, возможна работа усилителя 2 в режиме прямого усиления входного сигнала. При этом сигнал на выходе усилителя 2 будет иметь размерность скорости V(t). Указанный сигнал соответственно в размерности виброскорости или вибросмещения с выхода интегрирующего усилителя 2 передается на вход управляющего устройства 4, предварительно настраиваемого на уровень виброскорости V(t) или вибросмещения S(t).
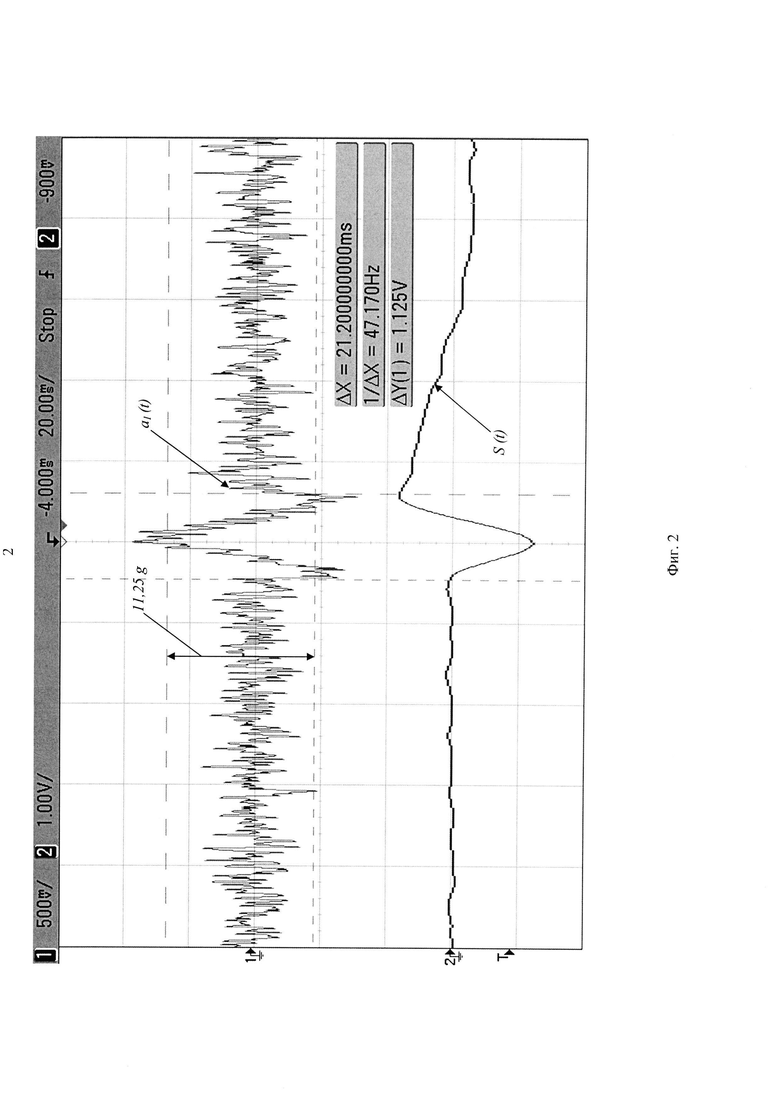
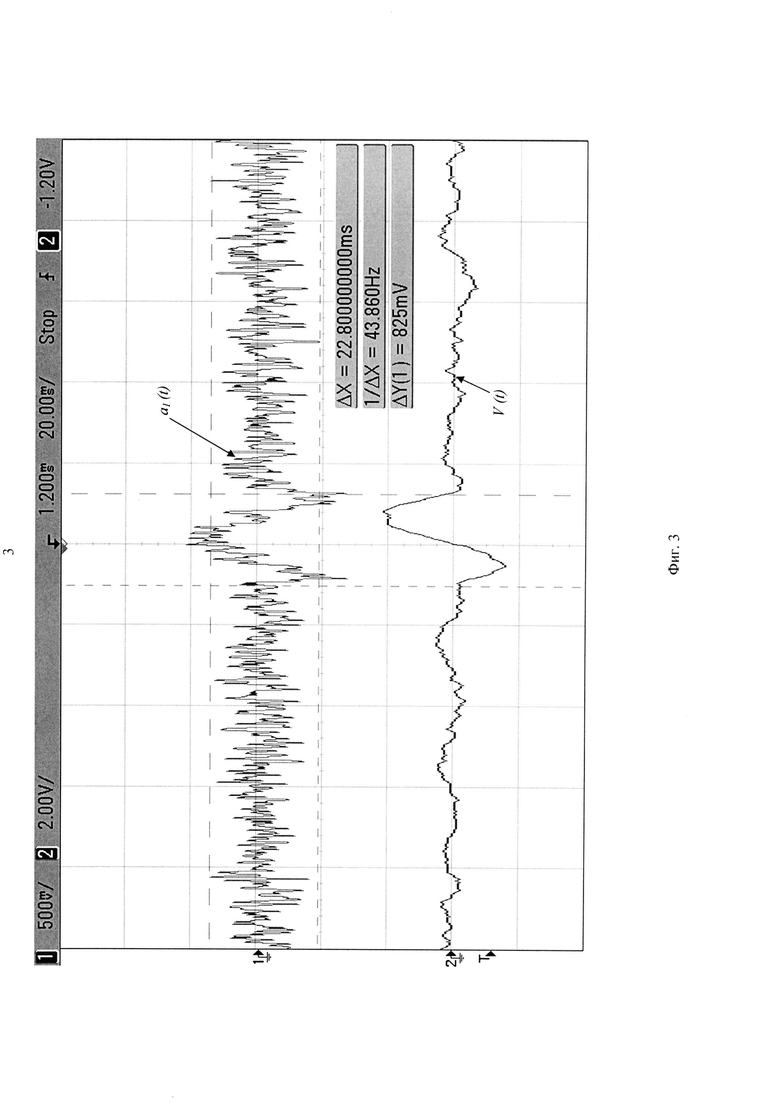
На фиг. 2 и фиг. 3 работа блок-схемы фиг. 1 соответственно в режиме вибросмещения и виброскорости. При этом верхние осциллограммы на фиг. 2 и 3 изображают сигнал a1(t) на входе фильтра 3; нижняя осциллограмма фиг. 2 представляет сигнал на выходе интегрирующего усилителя 2 в режиме вибросмещения S(t), а нижняя осциллограмма на фиг. 3 показывает сигнал на выходе усилителя 2 в режиме скорости V(t).
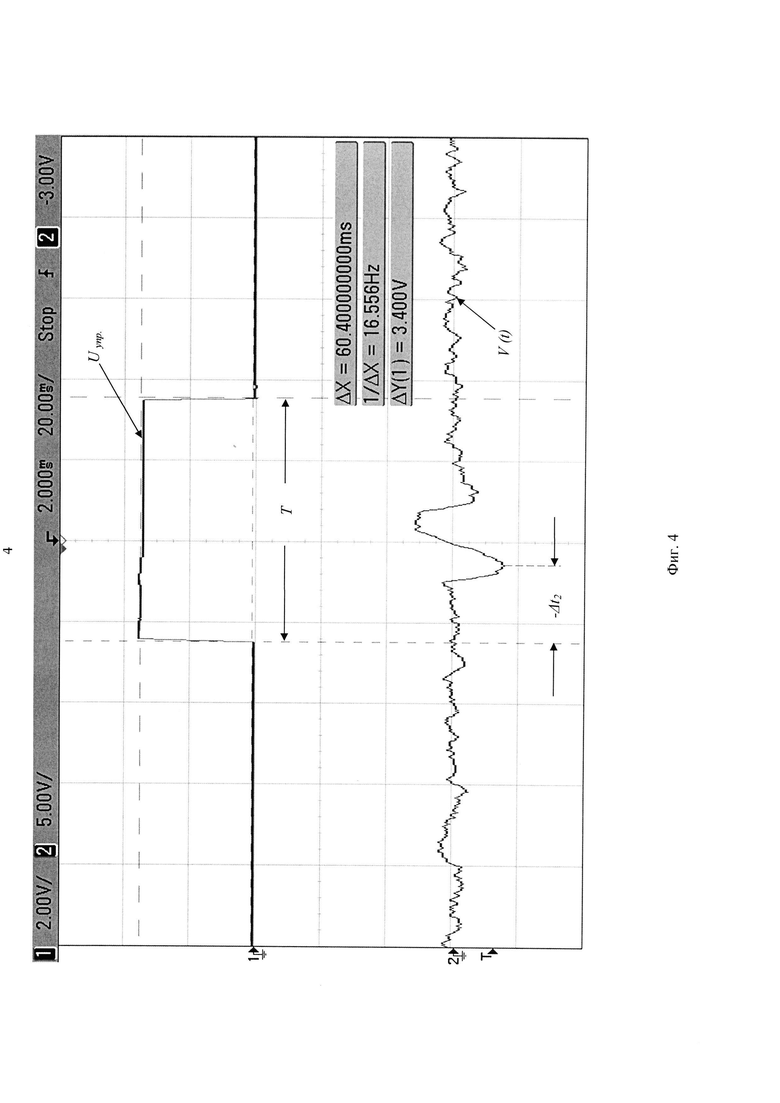
Рабочий режим управляющего устройства 4 представлен на фиг. 4. Здесь на верхней осциллограмме показан сигнал Uупр на выходе управляющего устройства 4, на нижней осциллограмме - сигнал виброскорости соответственно на входе устройства 4. Сигнал Uупр представляет собой прямоугольный импульс, амплитуда которого определяет полосу прозрачности фильтра 3, на управляемый вход которого и поступает сигнал Uупр. Предварительная регулировка амплитуды напряжения Uупр производится в соответствии с техническим описанием фильтра 3.
Кроме того, в управляющем устройстве 4 регулировке подлежат также передний фронт импульса Uупр относительно расположения импульса скорости или смещения. Указанные параметры обозначены на графиках фиг. 4 следующим образом:
- передний фронт импульса Uупр с упреждением - Δt;
- длительность Т импульса Uупр.
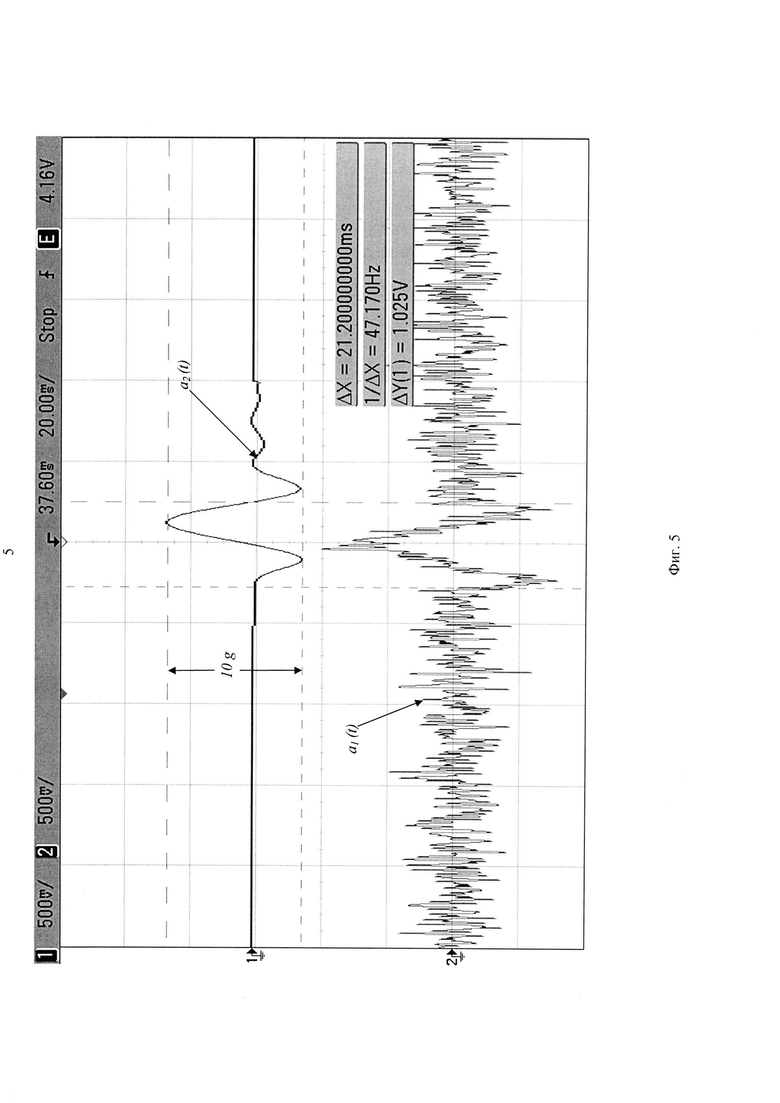
Облик сигналов a1(t) и a2(t) соответственно на входе и на выходе фильтра 3 показан на фиг. 5. Фильтр 3 работал в режиме фильтра низких частот с полосой прозрачности 100 Гц. Длительность реализации виброудара, выделенного из широкополосного случайного шума, составила 30 мс, длительность собственно виброудара 21,2 мс.
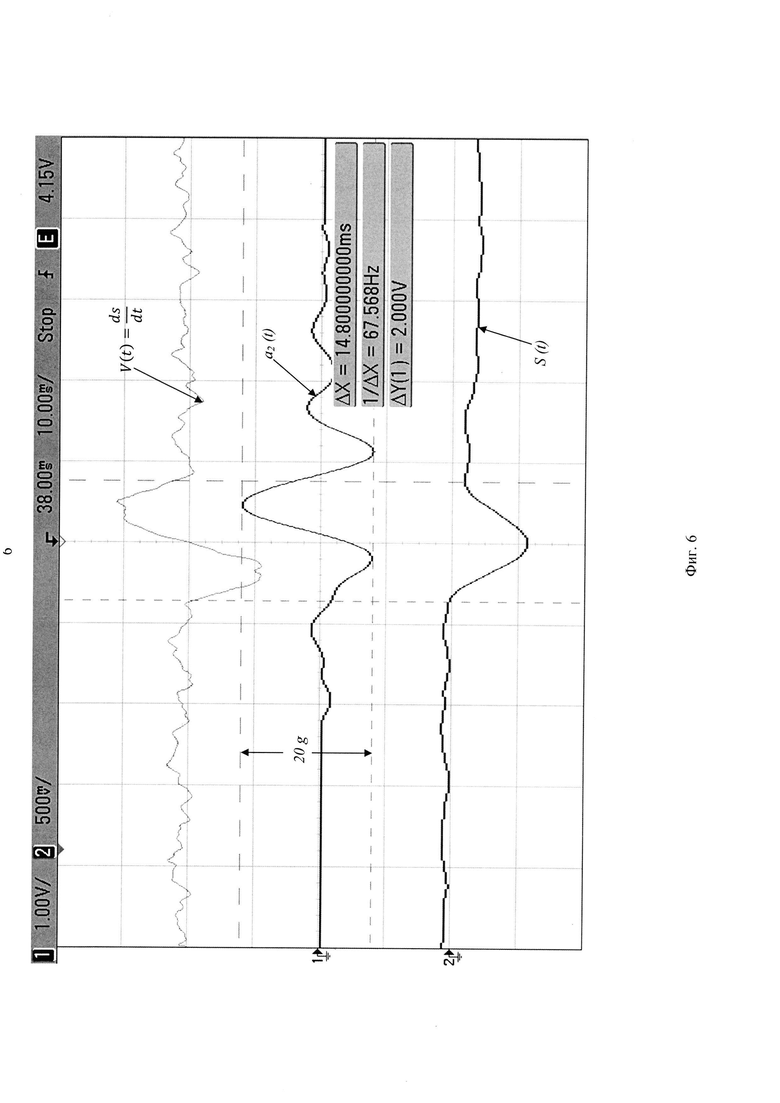
Используемый в предлагаемом изобретении в качестве регистратора 5 цифровой осциллограф обеспечивает одновременный прием двух исследуемых сигналов и по выбору одну из пяти математических операций (быстрое преобразование Фурье, умножение, вычитание, дифференцирование, интегрирование).
Один из режимов такой обработки показан на фиг. 6 Приложения. Здесь по 1 каналу произведена запись реализации сигнала a2(t) виброускорения на входе фильтра 3, по 2 каналу запись сигнала S(t) вибросмещения на выходе интегрирующего усилителя 2. Третья осциллограмма (верхний график) представляет первую производную от вибросмещения, т.е. виброскорость.
В осуществленном варианте предлагаемого изобретения использованы следующие аппаратурные средства:
- в качестве усилителей 1 и 2 - интегрирующий усилитель 00028 (Robotron Messelektronik);
- в качестве фильтра 3 - узкополосный фильтр 01013 (Robotron Messelektronik);
- в качестве управляющего устройства 4 - программируемый блок анализатора Photon (LDS-Dactron);
- в качестве блока 5 регистрации и обработки - цифровой осциллограф DSO6012 (Agilent Technologies).
Литература
1. В.А. Игнатов «Теория информации и передачи сигналов» М., «Советское радио», 1979, стр. 148-153.
2. И.А. Липкин «Основы статистической радиотехники, теории информации и кодировки» М., «Советское радио, 1978, стр. 131-135.
3. И.С. Гоноровский «Радиотехнические цепи и сигналы», ч. II, М., «Советское радио», 1986, стр. 252.
4. В.В. Солодовников «Введение в статистическую динамику систем автоматического управления» М., Л., Гос. издательство технико-теоретической литературы, 1957, стр. 285-288.
5. Узкополосный фильтр 01013. Техническое описание и инструкция по эксплуатации. Изд. VEB Robotron Drezden, стр. 9-30.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБРАБОТКИ СИГНАЛОВ | 2011 |
|
RU2498258C2 |
| СПОСОБ ЗАДАНИЯ ВИБРОУДАРОВ | 2014 |
|
RU2583854C1 |
| СПОСОБ ФИЛЬТРАЦИИ СИГНАЛОВ ПРОИЗВОЛЬНОЙ ФОРМЫ | 2013 |
|
RU2530211C9 |
| СПОСОБ ВЫДЕЛЕНИЯ ПОЛЕЗНОГО СИГНАЛА РЕАЛИЗУЕМОГО ПРОЦЕССА | 2008 |
|
RU2394216C1 |
| СПОСОБ ВОСПРОИЗВЕДЕНИЯ НЕСТАЦИОНАРНЫХ СЛУЧАЙНЫХ ПРОЦЕССОВ | 2010 |
|
RU2451272C1 |
| СИСТЕМА ОБРАБОТКИ СИГНАЛОВ | 2006 |
|
RU2326359C1 |
| СПОСОБ ВЫДЕЛЕНИЯ НЕСТАЦИОНАРНОГО СИГНАЛА | 2009 |
|
RU2428670C1 |
| Вибростенд | 1980 |
|
SU947673A1 |
| Устройство для измерения параметров вибрации | 1987 |
|
SU1471084A1 |
| МИКРОПРОЦЕССОРНЫЙ ВИБРОМЕТР | 1995 |
|
RU2098777C1 |
Изобретение относится к метрологии, в частности к средствам измерения динамических процессов. Способ фильтрации нестационарных сигналов, представляющих реализации исследуемых динамических процессов с последующим выделением полезного сигнала, осуществляют следующим образом. Сначала нестационарный сигнал подают на вход схемы интегрирования, при этом после интегрирования сигнал подают на вход управляющего устройства, которое на своем выходе формирует напряжение в виде прямоугольного импульса, при этом указанное напряжение управляет работой фильтра, на выходе которого формируют заданную реализацию как в полосе прозрачности фильтра, так и в заданных временных границах, при этом фильтрация исследуемого сигнала выполняется одновременно с операцией стробирования. Техническим результатом предлагаемого изобретения является возможность поиска и обнаружения полезного сигнала, сопровождаемого широкополосным стационарным процессом, и последующее определение характеристик полезного сигнала. 6 ил.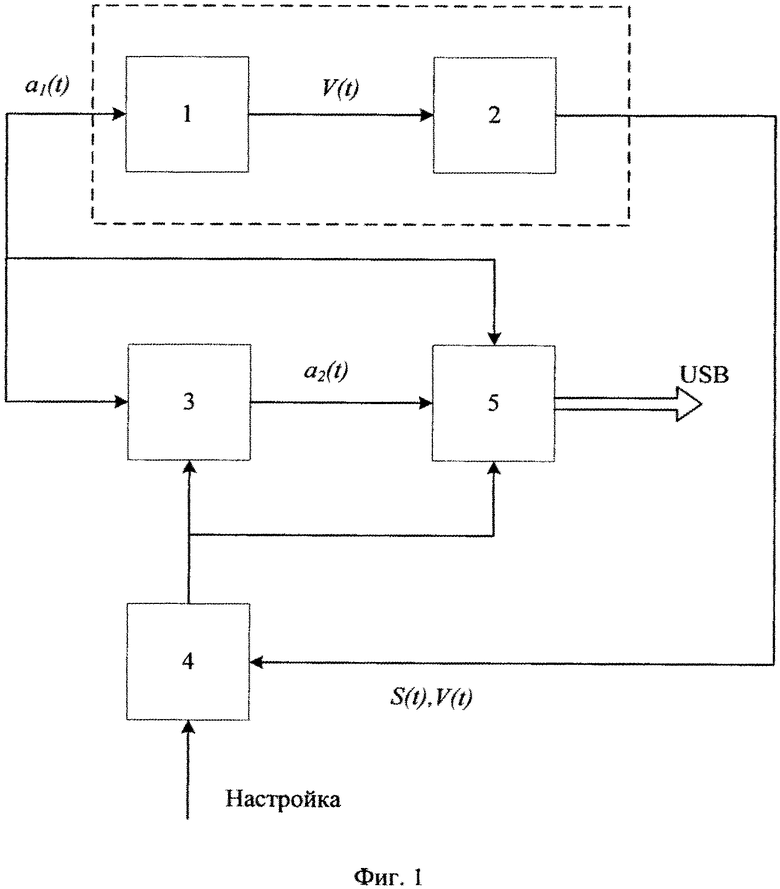
Способ фильтрации нестационарных сигналов, представляющих реализации исследуемых динамических процессов с последующим выделением полезного сигнала, отличающийся тем, что нестационарный сигнал подают на вход схемы интегрирования, при этом после интегрирования сигнал подают на вход управляющего устройства, которое на своем выходе формирует напряжение в виде прямоугольного импульса, при этом указанное напряжение управляет работой фильтра, на выходе которого формируют заданную реализацию как в полосе прозрачности фильтра, так и в заданных временных границах, при этом фильтрация исследуемого сигнала выполняется одновременно с операцией стробирования.
| СПОСОБ ФИЛЬТРАЦИИ СИГНАЛОВ ПРОИЗВОЛЬНОЙ ФОРМЫ | 2013 |
|
RU2530211C9 |
| Игнатов В.А | |||
| Теория информации и передачи сигналов | |||
| Учебник для ВУЗов, Изд-во Советское радио, 1979 (см | |||
| стр | |||
| Вага для выталкивания костылей из шпал | 1920 |
|
SU161A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Макаров А.А., Чиненков Л.А | |||
| Основы теории помехоустойчивости дискретных сигналов, СибГАТИ, 1997 (стр | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| US 6331998 A, 18.12.2001 | |||
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛОВ | 1992 |
|
RU2249833C2 |
| RU 2053522 C1, 27.01.1996 | |||
| СПОСОБ И УСТРОЙСТВО ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ ПО ЭЛЕКТРОСЕТЯМ | 2001 |
|
RU2216854C2 |
| US 4905209 A1, 27.02.1990. | |||

