Предлагаемая группа изобретений относится к военной технике, в частности к области ракетной техники.
При запуске летательного аппарата (ЛА) с отделяемым двигателем, например реактивного снаряда или ракеты, необходимо обеспечение надежного отделения двигателя от маршевой ступени после завершения его работы. Недопустимо как раннее отделение двигателя, когда его топливо еще не выгорело и возможен догон и удар двигателем по корме маршевой ступени, так и позднее отделение двигателя, при котором топливо полностью выгорело, а разделения еще нет, что приводит к потере скорости ЛА из-за увеличенного лобового сопротивления, вызванного наличием ненужных для дальнейшего полета аэродинамических элементов (двигателя).
Известен способ отделения маршевой ступени снаряда от двигателя, в котором при пуске реактивного снаряда на стартовом участке траектории полета за счет осевого (продольного) ускорения снаряда при работающем двигателе цепь запуска электровоспламенителя механизма разделения ступеней механически удерживают в разомкнутом состоянии, а в конце работы двигателя его тяга обнуляется и продольное ускорение снаряда меняет знак на обратный за счет торможения снаряда силами лобового сопротивления. При этом формируют электрическую цепь, по которой подают напряжение на электровоспламенитель механизма разделения ступеней, который срабатывает и происходит отделение маршевой ступени от двигателя, патент РФ №2167388, публикация 20.05.2001, кл. МПК F42B 15/10 [1].
Данный способ реализован в ЛА с отделяемым двигателем, содержащем маршевую ступень и пристыкованный к ней двигатель с механизмом разделения ступеней, перед которым параллельно продольной оси снаряда установлен исполнительный механизм дистанционного инерционного действия, выполненный в виде токонепроводящего корпуса с неподвижной контактной группой, токопроводящего инерционного тела, запираемого силовой пружиной в сторону механизма разделения ступеней, при этом инерционное тело выполнено в виде цилиндра с внутренним конусным отверстием, переходящим в цилиндр, причем масса инерционного тела и силовая пружина рассчитаны из условия срабатывания при продольном ускорении, определяемом по формуле

где 
F - рабочее усилие пружины в момент замыкания;
m - масса инерционного тела;
XM - сила лобового сопротивления маршевой ступени в момент отделения двигателя;
GM - масса маршевой ступени в момент отделения двигателя;
Xd - сила лобового сопротивления двигателя в момент отделения маршевой ступени;
Gd - масса двигателя в момент отделения маршевой ступени [1].
Значительная неопределенность исходных данных, сил лобового сопротивления XM и Xd, технологические разбросы масс маршевой ступени и двигателя GM и Gd не позволяют установить обоснованные требования к элементам исполнительного механизма инерциального действия, обеспечивающие его надежное срабатывание в оптимальный момент времени, что может привести как к преждевременному, так и задержанному срабатыванию.
В пусках ЛА исполнительный механизм дистанционного инерционного действия будет срабатывать до окончания работы двигателя t0дв. Момент срабатывания исполнительного механизма дистанционного инерционного действия t0им является моментом выдачи сигнала на механизм разделения ступеней tPC, tPC=t0им. Но т.к. возможно 
Исключить данную ситуацию можно, если сигнал на механизм разделения ступеней формировать при полном выгорании топлива двигателя и завершении падения тяги двигателя, что соответствует наименьшему значению величины продольного ускорения ЛА и смене знака производной продольного ускорения ЛА с отрицательного на положительный.
Также возможна нештатная ситуация при подготовке и проверках ЛА перед пуском. Например, от случайного удара, падения сработает исполнительный механизм дистанционного инерционного действия, вследствие чего произойдет разделение ступеней при подготовке к пуску в момент задействования источников питания на борту ЛА.
Поэтому задачей предлагаемой группы изобретений является устранение указанных выше недостатков, а именно: исключение нештатного разделения ступеней во время предстартовых проверок и подготовок ЛА, обеспечение надежного срабатывания механизма разделения ступеней ЛА в момент завершения падения тяги двигателя, т.е. в момент достижения величины продольного ускорения ЛА минимального значения, изменения отрицательного знака производной продольного ускорения на положительный и отделение маршевой ступени от двигателя без соударения.
В способе отделения маршевой ступени ЛА от двигателя, включающем механическое удержание в разомкнутом состоянии цепи запуска электровоспламенителя механизма разделения ступеней при пуске ЛА на стартовом участке траектории полета за счет продольного ускорения ЛА при работающем двигателе, формирование электрической цепи запуска электровоспламенителя механизма разделения ступеней в конце работы двигателя, подачу напряжения на электровоспламенитель механизма разделения ступеней, его срабатывание и отделение маршевой ступени от двигателя, поставленная задача достигается тем, что на борту ЛА в процессе полета измеряют величину продольного ускорения d и определяют скорость его изменения во времени, фиксируют момент t0 смены знака производной продольного ускорения с отрицательного на положительный, в момент t0 замыкают электрическую цепь запуска электровоспламенителя механизма разделения ступеней.
В ЛА с отделяемым двигателем, содержащем маршевую ступень и пристыкованный к ней двигатель с механизмом разделения ступеней, снабженным электровоспламенителем, при этом в маршевой ступени параллельно продольной оси ЛА установлен исполнительный механизм дистанционного инерционного действия, выполненный в виде токонепроводящего корпуса с неподвижной контактной группой и токопроводящего инерционного тела, запираемого силовой пружиной в сторону механизма разделения ступеней, при этом инерционное тело выполнено в виде цилиндра с внутренним конусным отверстием, переходящим в цилиндр, поставленная задача достигается тем, что маршевая ступень дополнительно оснащена последовательно соединенными датчиком линейных ускорений, ориентированным осью чувствительности параллельно продольной оси ЛА, аналогово-цифровым преобразователем и вычислителем, а в разрыв электрической цепи между исполнительным механизмом дистанционного инерционного действия и электровоспламенителем механизма разделения ступеней установлен управляемый вычислителем ключ, первый вход которого соединен с выходом вычислителя, второй вход - с выходом исполнительного механизма дистанционного инерционного действия, а выход - со входом электровоспламенителя механизма разделения ступеней, при этом масса инерционного тела и силовая пружина рассчитаны из условия срабатывания инерционного тела при значениях продольного ускорения

где dудерж - продольное ускорение, развиваемое двигателем во время его работы, минимально достаточное для механического удержания цепи запуска электровоспламенителя механизма разделения ступеней.
Технический результат обеспечивается за счет того, что в способе отделения маршевой ступени ЛА от двигателя на борту ЛА в процессе полета измеряют величину продольного ускорения d и определяют скорость его изменения во времени, фиксируют момент t0 смены знака производной продольного ускорения с отрицательного на положительный, в момент t0 замыкают электрическую цепь запуска электровоспламенителя механизма разделения ступеней.
Для этого маршевая ступень дополнительно оснащена последовательно соединенными датчиком линейных ускорений, ориентированным осью чувствительности параллельно продольной оси ЛА, аналогово-цифровым преобразователем и вычислителем, а в разрыв электрической цепи между исполнительным механизмом дистанционного инерционного действия и электровоспламенителем механизма разделения ступеней установлен управляемый вычислителем ключ, первый вход которого соединен с выходом вычислителя, второй вход - с выходом исполнительного механизма дистанционного инерционного действия, а выход - со входом электровоспламенителя механизма разделения ступеней, при этом масса инерционного тела и силовая пружина рассчитаны из условия срабатывания инерционного тела при значениях продольного ускорения
0<d<dудерж,
где dудерж - продольное ускорение, развиваемое двигателем во время его работы, минимально достаточное для механического удержания цепи запуска электровоспламенителя механизма разделения ступеней.
Данное техническое решение поясняется чертежом.
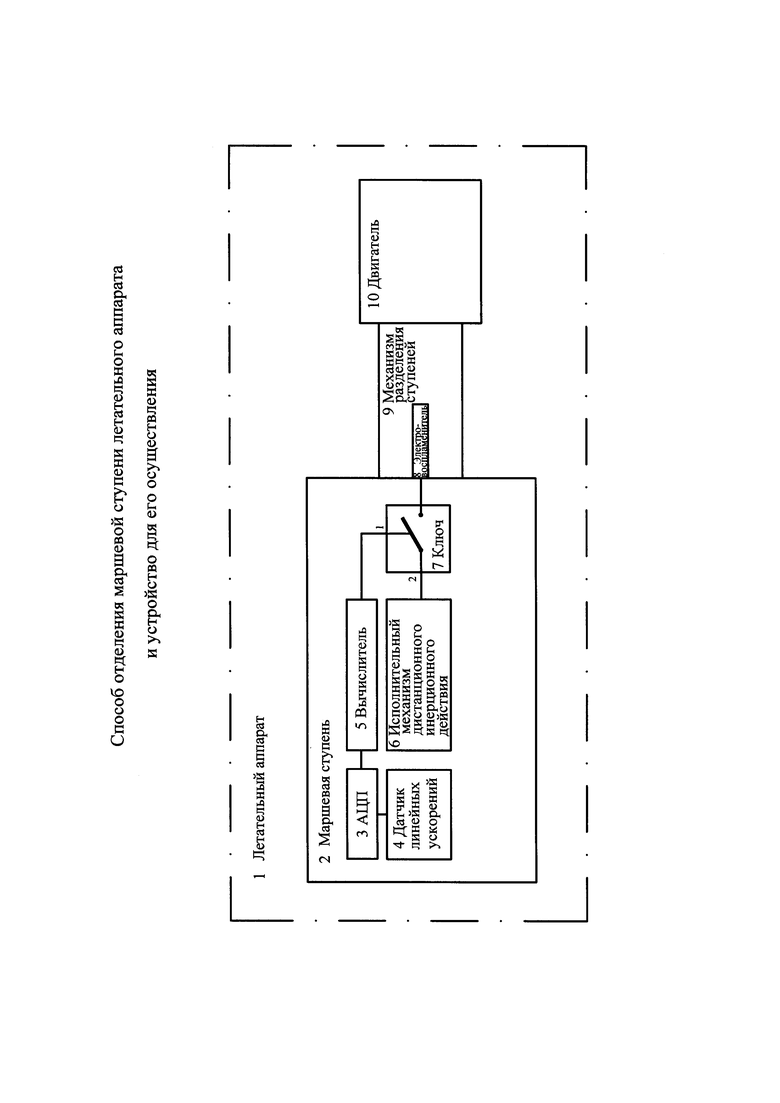
На чертеже схематически приведена блок-схема ЛА с отделяемым двигателем, где:
1 - летательный аппарат;
2 - маршевая ступень;
3 - АЦП;
4 - датчик линейных ускорений;
5 - вычислитель;
6 - исполнительный механизм дистанционного инерционного действия;
7 - ключ;
8 - электровоспламенитель;
9 - механизм разделения ступеней;
10 - двигатель.
В маршевой ступени (2) параллельно продольной оси ЛА установлен исполнительный механизм дистанционного инерционного действия (6), выход которого соединен со вторым входом ключа (7), разомкнутом в исходном состоянии. При пуске ЛА (1) на стартовом участке траектории полета блок (6) отслеживает величину перегрузки, действующей на ЛА, и за счет продольного ускорения ЛА при работающем двигателе (10) механически удерживает в разомкнутом состоянии цепь, по которой формируется напряжение на выходе блока (6). Конструкция блока (6) выполнена в виде токонепроводящего корпуса с неподвижной контактной группой, токопроводящего инерционного тела, запираемого силовой пружиной в сторону механизма разделения ступеней, при этом инерционное тело выполнено в виде цилиндра с внутренним конусным отверстием, переходящим в цилиндр.
До старта и на начальном участке полета ЛА последовательно установленные исполнительный механизм дистанционного инерционного действия (6) и ключ (7) на разных физических принципах надежно блокируют подачу сигнала на электровоспламенитель (8) и нештатное срабатывание механизма разделения ступеней (9). Кроме того, как показано выше, массу инерционного тела и его силовую пружину невозможно однозначно рассчитать по формуле (1). Поэтому условие срабатывания блока (6) для расчета массы инерционного тела и силовой пружины определены по условию (2) в достаточно широком диапазоне продольного ускорения d, от 0 до dудерж.
В конце работы двигателя (10) в момент t0дв его тяга падает и продольное ускорение ЛА меняет знак на обратный за счет торможения ЛА силами лобового сопротивления. Наиболее надежное и безопасное отделение двигателя (10) должно осуществляться в момент t0 наименьшего значения величины продольного ускорения ЛА и изменения отрицательного знака производной продольного ускорения ЛА на положительный.
Вдоль продольной оси ЛА в маршевой ступени (2) установлен датчик линейных ускорений (4), который в процессе полета ЛА измеряет продольное ускорение и на выходе формирует пропорциональный продольному ускорению аналоговый сигнал. Выход блока (4) соединен с АЦП (3), преобразующим для последующих вычислений аналоговый сигнал в цифровой, который поступает в вычислитель (5). Блок (5) на каждом текущем временном шаге определяет значение производной продольного ускорения ЛА и сравнивает его со значением производной продольного ускорения на предыдущем временном шаге. При этом выход вычислителя (5) подключен к первому входу (входу управления) ключа (7), на втором входе которого действует напряжение с выхода исполнительного механизма дистанционного инерционного действия (6). Ключ (7) разомкнут. Согласно условию (2) масса инерционного тела и силовая пружина исполнительного механизма дистанционного инерционного действия (6) рассчитаны таким образом, что блок (6) срабатывает и замыкается при значении d>0.
По мере выгорания топлива двигателя и падения его тяги уменьшается скорость ЛА, а величина продольного ускорения становится отрицательной вследствие торможения ЛА набегающим потоком воздуха.
В момент t0, когда топливо двигателя полностью выгорело и производная продольного ускорения ЛА меняет знак с отрицательного на положительный, блок (5) формирует сигнал, поступающий на первый вход ключа (7), который замыкается. К этому моменту исполнительный механизм дистанционного инерционного действия (6) уже сработал, на втором входе ключа (7) присутствует напряжение и формируется электрическая цепь, по которой с выхода ключа (7) подается напряжение на электровоспламенитель (8) механизма разделения ступеней (9). Блок (9) срабатывает, и происходит отделение маршевой ступени (2) от двигателя (10). Таким образом исключается подача напряжения на блок (8) до окончания работы двигателя.
В предлагаемом устройстве исполнительный механизм дистанционного инерционного действия (6), механизм разделения ступеней (9), электровоспламенитель (8), двигатель (10) могут быть выполнены, например, аналогично блокам прототипа [1]. В качестве ключа (7) может быть применен, например, полевой транзистор SI4401.
В качестве блока (4) может быть применен, например, датчик линейных ускорений ADXL150 фирмы Analog Devises (США).
Вычислитель (5) может быть выполнен, например, на процессоре ATMEGA128, АЦП (3) - на микросхеме К1107 ПВ1.
Таким образом, использование предлагаемых способа отделения маршевой ступени летательного аппарата от двигателя и устройства для его осуществления позволяет:
- исключить нештатное разделение двигателя и маршевой ступени при подготовке и проверках ЛА перед пуском;
- осуществлять отделение маршевой ступени от двигателя не ранее окончания его работы и полного выгорания топлива без последующего догона и удара по корме маршевой ступени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство подачи сигнала на отделение стартовой ступени вертикально стартующего летательного аппарата | 2019 |
|
RU2719799C1 |
| РЕАКТИВНЫЙ СНАРЯД С ОТДЕЛЯЕМЫМ ДВИГАТЕЛЕМ | 2000 |
|
RU2167388C1 |
| РЕАКТИВНЫЙ СНАРЯД | 2002 |
|
RU2233424C1 |
| МНОГОЦЕЛЕВАЯ УПРАВЛЯЕМАЯ РАКЕТА В ПУСКОВОМ КОНТЕЙНЕРЕ | 2004 |
|
RU2277693C1 |
| Двухсистемная управляемая ракета в транспортно-пусковом контейнере | 2023 |
|
RU2814065C1 |
| КОНТАКТНОЕ ВЗРЫВАТЕЛЬНОЕ УСТРОЙСТВО | 2004 |
|
RU2268457C1 |
| Способ запуска маршевого двигателя управляемой ракеты и устройство для его осуществления | 2019 |
|
RU2721923C1 |
| СПОСОБ ИНИЦИИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ АРТИЛЛЕРИЙСКОГО СНАРЯДА, БАЛЛИСТИЧЕСКИЙ КОЛПАК И ДИСТАНЦИОННАЯ ТРУБКА УПРАВЛЯЕМОГО АРТИЛЛЕРИЙСКОГО СНАРЯДА | 2000 |
|
RU2192615C2 |
| РЕАКТИВНЫЙ СНАРЯД | 2003 |
|
RU2239782C1 |
| РЕАКТИВНЫЙ СНАРЯД | 1995 |
|
RU2105949C1 |
Группа изобретений относится к области ракетной техники. Способ отделения маршевой ступени ЛА включает механическое удержание в разомкнутом состоянии цепи запуска электровоспламенителя механизма разделения ступеней при пуске ЛА на стартовом участке траектории полета. На борту ЛА в процессе полета измеряют величину продольного ускорения и определяют скорость его изменения во времени, фиксируют момент смены знака производной продольного ускорения с отрицательного на положительный и замыкают электрическую цепь запуска электровоспламенителя механизма разделения ступеней. ЛА с отделяемым двигателем содержит маршевую ступень и пристыкованный к ней двигатель с механизмом разделения ступеней, снабженным электровоспламенителем. В маршевой ступени параллельно продольной оси ЛА установлен исполнительный механизм дистанционного инерционного действия, выполненный в виде токонепроводящего корпуса с неподвижной контактной группой и токопроводящего инерционного тела, запираемого силовой пружиной в сторону механизма разделения ступеней. Техническим результатом является исключение нештатного разделения двигателя и маршевой ступени при подготовке и проверках ЛА перед пуском. 2 н.п. ф-лы, 1 ил.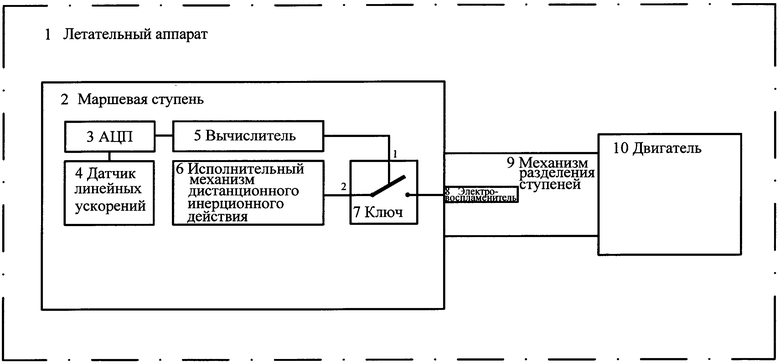
1. Способ отделения маршевой ступени летательного аппарата (ЛА), включающий механическое удержание в разомкнутом состоянии цепи запуска электровоспламенителя механизма разделения ступеней при пуске ЛА на стартовом участке траектории полета за счет продольного ускорения ЛА при работающем двигателе, формирование электрической цепи запуска электровоспламенителя механизма разделения ступеней в конце работы двигателя, подачу напряжения на электровоспламенитель механизма разделения ступеней, его срабатывание и отделение маршевой ступени от двигателя, отличающийся тем, что на борту ЛА в процессе полета измеряют величину продольного ускорения d и определяют скорость его изменения во времени, фиксируют момент t0 смены знака производной продольного ускорения с отрицательного на положительный, в момент t0 замыкают электрическую цепь запуска электровоспламенителя механизма разделения ступеней.
2. ЛА с отделяемым двигателем, содержащий маршевую ступень и пристыкованный к ней двигатель с механизмом разделения ступеней, снабженным электровоспламенителем, при этом в маршевой ступени параллельно продольной оси ЛА установлен исполнительный механизм дистанционного инерционного действия, выполненный в виде токонепроводящего корпуса с неподвижной контактной группой и токопроводящего инерционного тела, запираемого силовой пружиной в сторону механизма разделения ступеней, при этом инерционное тело выполнено в виде цилиндра с внутренним конусным отверстием, переходящим в цилиндр, отличающийся тем, что маршевая ступень дополнительно оснащена последовательно соединенными датчиком линейных ускорений, ориентированным осью чувствительности параллельно продольной оси ЛА, аналогово-цифровым преобразователем и вычислителем, а в разрыв электрической цепи между исполнительным механизмом дистанционного инерционного действия и электровоспламенителем механизма разделения ступеней установлен управляемый вычислителем ключ, первый вход которого соединен с выходом вычислителя, второй вход - с выходом исполнительного механизма дистанционного инерционного действия, а выход - со входом электровоспламенителя механизма разделения ступеней, при этом масса инерционного тела и силовая пружина рассчитаны из условия срабатывания инерционного тела при значениях продольного ускорения
0<d<dудерж,
где dудерж - минимальное продольное ускорение, развиваемое двигателем во время его работы, достаточное для механического удержания цепи запуска электровоспламенителя механизма разделения ступеней.
| РЕАКТИВНЫЙ СНАРЯД С ОТДЕЛЯЕМЫМ ДВИГАТЕЛЕМ | 2000 |
|
RU2167388C1 |
| СПОСОБ ОТДЕЛЕНИЯ МАРШЕВОЙ СТУПЕНИ СНАРЯДА ОТ СТАРТОВОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2313762C2 |
| RU 94000675 A1, 20.09.1995 | |||
| US 5318255 A, 07.06.1994 | |||
| KR 20140062898 A, 27.05.2014. | |||

