Настоящее изобретение относится к агрегату с элементом, приводимым в действие с помощью по меньшей мере одного рабочего привода, в котором по меньшей мере имеется один цилиндр для рекуперации энергии, служащий для рекуперации энергии из движения подвижного элемента, который включает в себя камеру, наполненную газом. В частности, агрегат представляет собой экскаватор или погрузочно-разгрузочное устройство. В частности, настоящее изобретение используют в таких агрегатах, в которых рабочий привод содержит по меньшей мере один рабочий гидравлический цилиндр, с помощью которого приводится в движение подвижный элемент.
В таких агрегатах газ в газонаполненной камере цилиндра для рекуперации энергии сжимается при опускании подвижного элемента, и, таким образом, накапливает потенциальную энергию с целью ее высвобождения при поднимании подвижного элемента для обеспечения рабочего привода.
Из DE 10 2008 034 582 A1 известен агрегат, в котором газонаполненная камера цилиндра для рекуперации энергии образована газонаполненной нижней стороной цилиндра для рекуперации энергии и полым поршневым штоком цилиндра для рекуперации энергии.
Задачей настоящего изобретения является дальнейшее совершенствование функционирования такого агрегата, оснащенного цилиндром для рекуперации энергии с камерой, наполненной газом.
Согласно изобретению, данная задача решена посредством агрегата в соответствии с п.1. Настоящее изобретение относится к агрегату с элементом, приводимым в действие с помощью по меньшей мере одного рабочего привода, в котором по меньшей мере имеется один цилиндр для рекуперации энергии, служащий для рекуперации энергии из движения подвижного элемента, который включает в себя камеру, наполненную газом. Согласно изобретению предусмотрено, что приведение в действие агрегата производится в зависимости от температуры газа в камере, наполненной газом. В частности, для этого имеется система непосредственного или косвенного определения температуры газа в камере, наполненной газом, которая подает сигнал, служащий в качестве входной переменной контроллера.
Теперь авторы настоящего изобретения обнаружили, что температура газа в газонаполненной камере цилиндра для рекуперации энергии имеет значительное влияние на характеристическую кривую цилиндра «усилие/рабочий ход» для рекуперации энергии. Согласно изобретению, для этого предусмотрена система непосредственного или косвенного определения температуры газа, при этом приведение в действие агрегата производится с учетом влияния температуры газа на характеристическую кривую цилиндра для рекуперации энергии. В частности, приведение в действие агрегата по меньшей мере частично компенсирует изменение характеристической кривой цилиндра для рекуперации энергии в случае изменения температуры газа в камере, наполненной газом.
В предпочтительном варианте осуществления настоящего изобретения, приведение в действие рабочего привода подвижного элемента производится в зависимости от температуры газа в камере, наполненной газом. В частности, приведение в действие рабочего привода, таким образом, компенсирует изменение характеристической кривой цилиндра для рекуперации энергии в случае изменения температуры газа в камере, наполненной газом.
Температура газа в камере, наполненной газом, может быть определена и непосредственно, и опосредованно. Предпочтительно, имеется температурный датчик, который измеряет температуру газа в камере, наполненной газом. В принципе, здесь нужно учесть, что температура газа подходит меньше, чем управляющая переменная, поскольку она очень сильно колеблется в зависимости от состояния движения. В качестве альтернативного или дополнительного варианта, можно также измерить температуру элемента цилиндра для рекуперации энергии или агрегата, соединенного с камерой теплопроводящим способом. Температура газа также может быть определена иными опосредованными способами. Например, температура газа также может быть определена путем замеров профиля «рабочий ход цилиндра/давление газа» или профиля «скорость цилиндра/давление газа».
Предпочтительно, температурный сигнал усреднен за определенный период времени и использован как входная переменная контроллера. Предпочтительно, воздействующая переменная привода варьируется в зависимости от температуры газа, в частности от усредненной температуры газа. В частности, в контроллере может храниться карта для управляющей переменной в зависимости от температуры газа.
В первом варианте осуществления изобретения предусмотрено, что максимальное усилие рабочего привода отрегулировано в зависимости от температурного сигнала.
В частности, максимальное усилие рабочего привода увеличивается при уменьшении температуры газа. Это устраняет ту проблему, когда при низких температурах газа цилиндр для рекуперации энергии создает более низкое давление или более слабое усилие цилиндра, чем при более высоких температурах, так, что при температурах газа ниже определенного заданного значения не удается достичь нужной грузоподъемности. Тем не менее, чтобы, несмотря на низкую температуру газа, достичь требуемой грузоподъемности, максимальное усилие рабочего привода соответственно увеличено, с тем, чтобы в целом достичь нужной грузоподъемности.
Кроме того, общая достигаемая грузоподъемность также возрастает при увеличении температуры газа и соответствующем увеличении давления газа в цилиндре для рекуперации энергии. Таким образом, нагрузки на оборудование могут увеличиться выше допустимого значения, что может снизить срок службы оборудования. Согласно изобретению, в силу этого также может быть предусмотрено, что в случае повышения температуры газа в газовом цилиндре, максимальное усилие рабочего привода снижается. Таким образом, более высокая нагрузка на оборудование уравновешивается цилиндром для рекуперации энергии.
В частности, максимальное усилие рабочего привода может быть снижено, когда температура газа выше заданной температуры газа. Кроме того, максимальное усилие рабочего привода может быть увеличено, когда температура ниже заданной температуры газа. В частности, приведение в действие производится в зависимости от характеристической кривой цилиндра для рекуперации энергии.
Предпочтительно, максимальное усилие рабочего привода отрегулировано так, что максимальная грузоподъемность подвижного элемента всегда поддерживается по существу постоянной. В частности, усилие рабочего привода отрегулировано таким образом, что суммарное усилие рабочего привода и цилиндра для рекуперации энергии соответствует нужному заданному значению независимо от температуры газа.
В дополнительном варианте осуществления настоящего изобретения рабочее динамическое усилие рабочего привода может быть отрегулировано в зависимости от температурного сигнала. Здесь воздействие температуры также может изменить рабочую характеристику всей системы цилиндра для рекуперации энергии и рабочего привода. В частности, изменение характеристической кривой цилиндра для рекуперации энергии при изменении температура газа компенсируется соответствующим приведением в действие рабочего привода.
Рабочее динамическое усилие машины (подъем и опускание подвижного элемента) обычно соответствует характеристике цилиндра для рекуперации энергии при заданной температуре. Однако, если температура газа ниже нужной заданной температуры, давление газа ниже заданного давления газа. С другой стороны, давление газа выше заданного значения, когда температура газа выше нужной заданной температуры. Это ведет к тому, что снижение температуры газа ниже заданного значения приведет к увеличенной скорости опускания и пониженной скорости подъема, в то время как превышение температурой газа заданной температуры приведет к пониженной скорости опускания и увеличенной скорости подъема. Предпочтительно, чтобы рабочий привод теперь приводился в действие в зависимости от температурного сигнала и уравновешивал эти изменения рабочего динамического усилия.
Таким образом, можно избежать слишком больших скоростей подъема и опускания, которые увеличили бы составляющую нагрузку. Кроме того, упрощается работа агрегата, поскольку оператору предоставлено по существу всегда одинаковое рабочее динамическое усилие. Кроме того, любое действие можно предпринять в любое время. В частности, в силу этого всегда есть возможность осуществить достаточно быстрое перемещение подвижного элемента.
В частности, в зависимости от температуры газа, в частности текущей средней температуры газа, приведение в действие функции подъема и опускания подвижного элемента реализовано таким образом, что максимальная скорость подъема и опускания всегда может поддерживаться постоянной.
В частности, настоящее изобретение использовано в таких агрегатах, в которых рабочий привод содержит по меньшей мере один рабочий гидравлический цилиндр. Согласно изобретению, приведение в действие гидравлики рабочего гидравлического цилиндра совершается в зависимости от непосредственного либо опосредованного температурного сигнала. В частности, сигнал системы, которая непосредственно либо опосредованно измеряет температуру газа в цилиндре для рекуперации энергии, для этого поступает в контроллер гидравлики агрегата.
В первом варианте осуществления может быть предусмотрено, что первичное давление гидравлики рабочего привода отрегулировано в зависимости от температурного сигнала. Чтобы по меньшей мере частично компенсировать воздействие температуры газа на грузоподъемность агрегата, предельные величины первичного давления рабочих гидравлических цилиндров временно увеличиваются или уменьшаются согласно изобретению в требуемом или допустимом диапазоне в зависимости от температуры газа. В частности, предельные величины первичного давления увеличиваются для достижения нужной грузоподъемности, несмотря на низкую температуру газа. Если температура газа затем растет в результате эксплуатационной деятельности, либо в результате подачи внешнего тепла, предельные величины первичного давления рабочего цилиндра снова могут быть снижены до обычных заданных значений. С другой стороны, предельные величины первичного давления цилиндров стрелы могут быть снижены временно в зависимости от температуры газа, с целью уравновесить слишком большую нагрузку на оборудование. В частности, предельные величины давления цилиндров стрелы могут быть снижены временно, когда температура газа поднимается выше определенного значения.
Таким образом, в частности, отрегулировано максимальное первичное давление гидравлики рабочего привода. Предпочтительно, это произведено путем приведения в действие клапана ограничения первичного давления. Этот же клапан обычно ограничивает давление гидравлической текучей среды, доводимой насосом до максимального рабочего давления.
Во втором примерном варианте осуществления предусмотрено, что рабочее динамическое усилие рабочего гидравлического цилиндра отрегулировано в зависимости от температурного сигнала. В зависимости от температуры газа, в частности, текущей средней температуры газа, приведение в действие функции подъема и опускания подвижного элемента может, таким образом, быть отрегулировано так, что воздействие температуры газа на максимальную скорость опускания или подъема по меньшей мере частично компенсировано.
Например, в зависимости от температуры газа может быть соответствующим образом отрегулировано управляющее давление или управляющий ток соответствующих клапанов на подъем и/или опускание подвижного элемента. В частности, управляющее давление и/или управляющий ток может быть увеличены или понижены, с целью регулировки сечения открытия клапана и соответственно, максимальной скорости при опускании и/или подъеме.
При опускании, в частности, запорные клапаны могут срабатывать соответствующим образом. С другой стороны, при подъеме, клапаны управляющего блока срабатывают предпочтительно в зависимости от температуры.
Кроме того, угол поворота соответствующего гидравлического насоса и/или обороты дизельного двигателя могут быть отрегулированы в зависимости от температуры газа в цилиндре для рекуперации энергии. Предпочтительно, это также реализовано при подъеме подвижного элемента.
Путем регулировки предельных значений первичного давления рабочей гидравлики согласно изобретению в зависимости от температуры газа в цилиндре для рекуперации энергии, можно обеспечить нужную грузоподъемность и ограничить нагрузку на оборудование.
С другой стороны, путем регулировки управляющего давления или электрических управляющих сигналов в зависимости от температуры газа в энергоаккумулирующем цилиндре можно поддерживать постоянным и рабочее динамическое усилие машины, и составляющую нагрузку.
В результате, цилиндр для рекуперации энергии может действовать в качестве автаркической системы, в силу чего регулировка в зависимости от температуры производится путем модифицирования существующей гидравлической системы.
Согласно изобретению, регулировка предпочтительно может выполняться исходя из текущей средней температуры газа. В течение определенного временного интервала каждая средняя температура газа может быть определена, при этом она будет служить в качестве управляющей переменной для регулировки.
Помимо агрегата согласно изобретению, настоящее изобретение, кроме того, содержит способ управления агрегатом с элементом, приводимым в действие с помощью по меньшей мере одного рабочего привода, в котором по меньшей мере имеется один цилиндр для рекуперации энергии, служащий для рекуперации энергии из движения подвижного элемента, который включает в себя камеру, наполненную газом. Согласно изобретению предусмотрено, что приведение в действие рабочего привода производится в зависимости от температуры газа в камере, наполненной газом. Таким образом, могут быть достигнуты те же самые преимущества, что уже были описаны по отношению к агрегату. Предпочтительно, способ применен таким образом, как это было описано выше.
Кроме того, настоящее изобретение содержит цилиндр для рекуперации энергии для агрегата, как было описано выше. В частности, цилиндр для рекуперации энергии содержит температурный датчик. В частности, температурный датчик может измерять температуру газа в камере, наполненной газом и/или температуру элемента цилиндра для рекуперации энергии, соединенной с этой камерой теплопроводящим способом. Могут быть применены дополнительные способы измерений, как уже объяснено выше.
Кроме того, настоящее изобретение предпочтительно содержит контроллер для рабочего привода агрегата, как подробно было описано выше. В частности, температурный сигнал служит входной переменной контроллера. В частности, контроллер приводит в действие рабочую гидравлику рабочего привода в зависимости от температурного сигнала.
Предпочтительно, цилиндры для рекуперации энергии или контроллер выполнены так, как было изложено выше применительно к агрегату.
Теперь особенно предпочтительные применения настоящего изобретения будут кратко пояснены еще раз:
Согласно изобретению, агрегат представляет собой, в частности, передвижной агрегат, в частности экскаватор или погрузочно-разгрузочное устройство.
Агрегат включает в себя элемент, приводимый в действие с помощью по меньшей мере одного рабочего привода, в частности, рабочего гидравлического цилиндра, в котором по меньшей мере имеется один цилиндр для рекуперации энергии, служащий для рекуперации энергии из движения подвижного элемента.
Сам цилиндр для рекуперации энергии с газонаполненной камерой служит аккумулятором энергии для рекуперации энергии из движения подвижного элемента. Пространство, образованное нижней стороной цилиндра для рекуперации энергии, предпочтительно заполнено газом под давлением, который сжимается при движении поршневого штока к днищу. Затем накопленная энергия высвобождается при движении вверх поршневого штока для содействия усилию рабочего привода, в частности рабочего гидравлического цилиндра. Кроме того, поршневой шток цилиндра для рекуперации энергии предпочтительно является полым и выходит на нижнюю сторону, так что внутренняя часть поршневого штока образует часть камеры, наполненной газом.
Подвижный элемент агрегата согласно изобретению прикреплен к агрегату предпочтительно вращательно относительно вертикальной оси вращения и может вращаться в вертикальной поворотной плоскости с помощью одного или нескольких рабочих приводов, в частности, рабочих гидравлических цилиндров. В частности, подвижный элемент представляет собой рукоять экскаватора или стрелу погрузочно-разгрузочного устройства. Кроме того, предпочтительно, передвижной агрегат включает в себя нижнюю платформу с ходовым механизмом и верхнюю платформу, установленную на ней с возможностью вращения относительно вертикальной оси вращения, с которой шарнирно сочленен подвижный элемент.
На подвижном элементе может быть размещена рабочая насадка, например, лопата или грейфер. При опускании подвижного элемента, потенциальная энергия подвижного элемента и рабочей насадки накапливается с помощью цилиндра для рекуперации энергии, с тем, чтобы по меньшей мере частично компенсировать вес оборудования при последующем движении вверх подвижного элемента. В результате, меньше энергии должно быть израсходовано через рабочие гидравлические цилиндры, чтобы выполнить движение вверх подвижного элемента. В результате, энергетический баланс агрегата улучшается, поскольку требуется меньше установленной мощности двигателя и снижается расход топлива.
Подобно одному или нескольким рабочим гидравлическим цилиндрам, цилиндр для рекуперации энергии согласно изобретению предпочтительно размещен между нижней платформой агрегата и подвижным элементом. При перемещении подвижного элемента, цилиндр для рекуперации энергии соответственно перемещается одновременно с рабочим гидравлическим цилиндром.
Теперь настоящее изобретение будет объяснено подробно со ссылкой на примерные варианты осуществления и чертежи.
На чертежах:
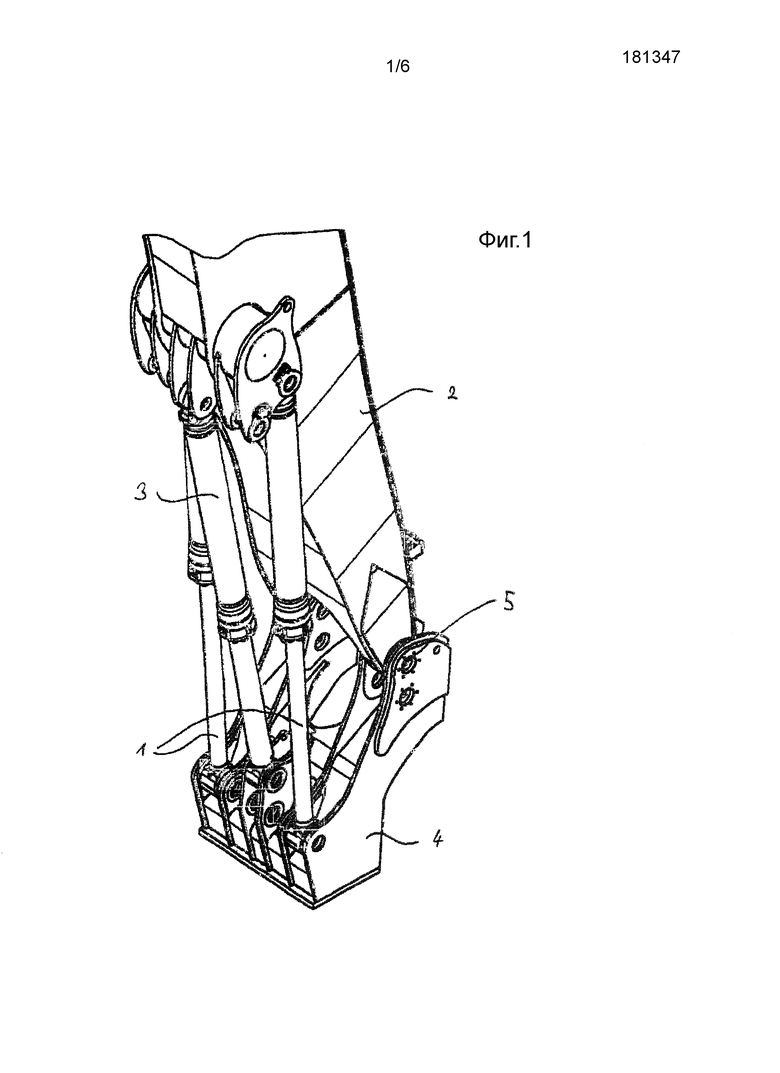
На фиг.1 показан примерный вариант выполнения агрегата согласно изобретению с двумя рабочими гидравлическими цилиндрами и одним цилиндром для рекуперации энергии.
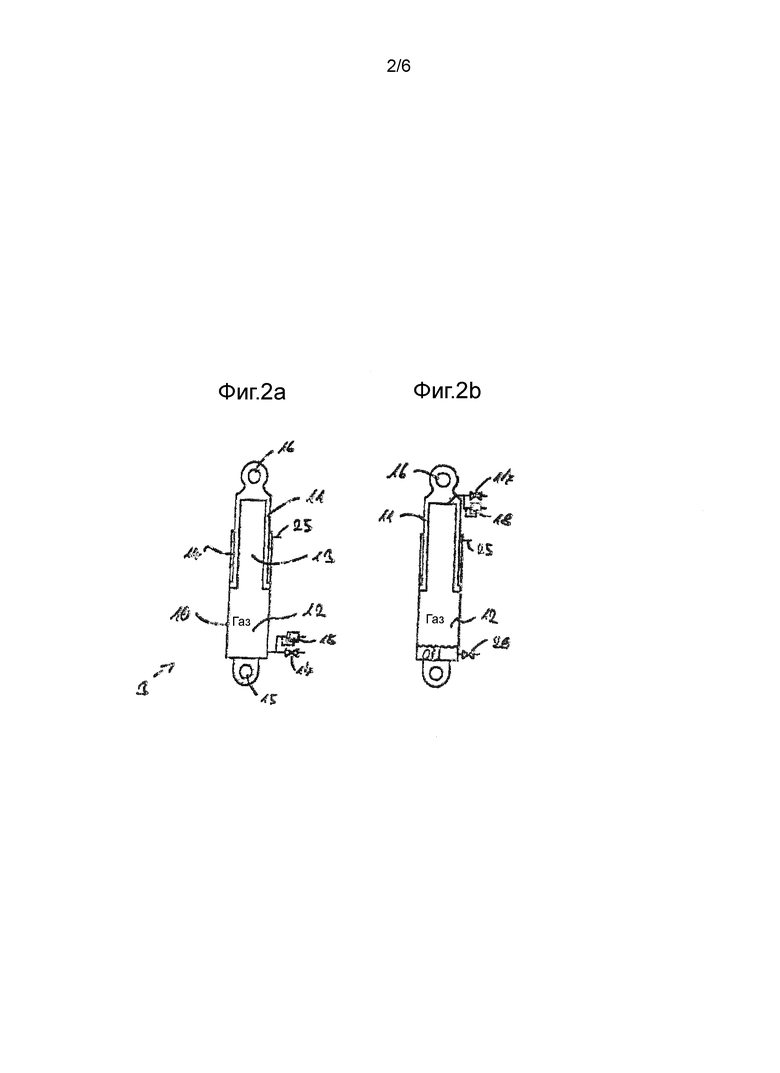
На фиг.2a показана принципиальная схема первого варианта цилиндра для рекуперации энергии согласно изобретению.
На фиг.2b показана принципиальная схема второго варианта цилиндра для рекуперации энергии согласно изобретению.
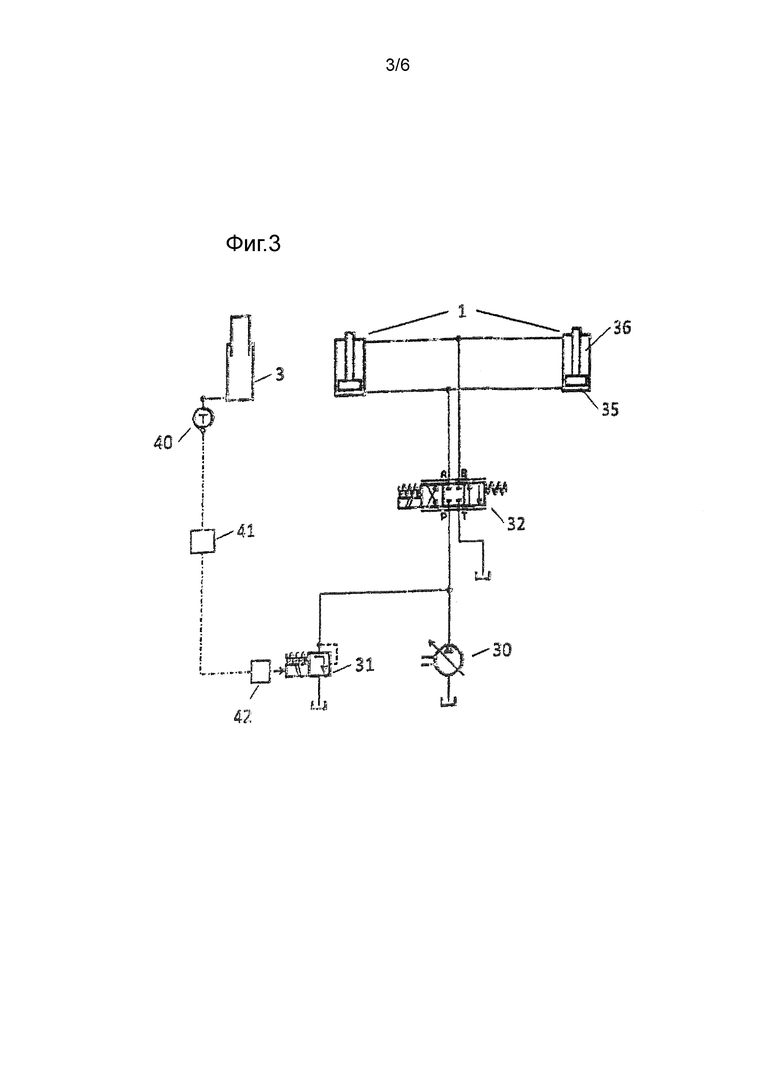
На фиг.3 показан первый примерный вариант выполнения контроллера для рабочего привода согласно изобретению, в котором максимальное усилие рабочего привода отрегулировано в зависимости от температуры газа в цилиндре для рекуперации энергии.
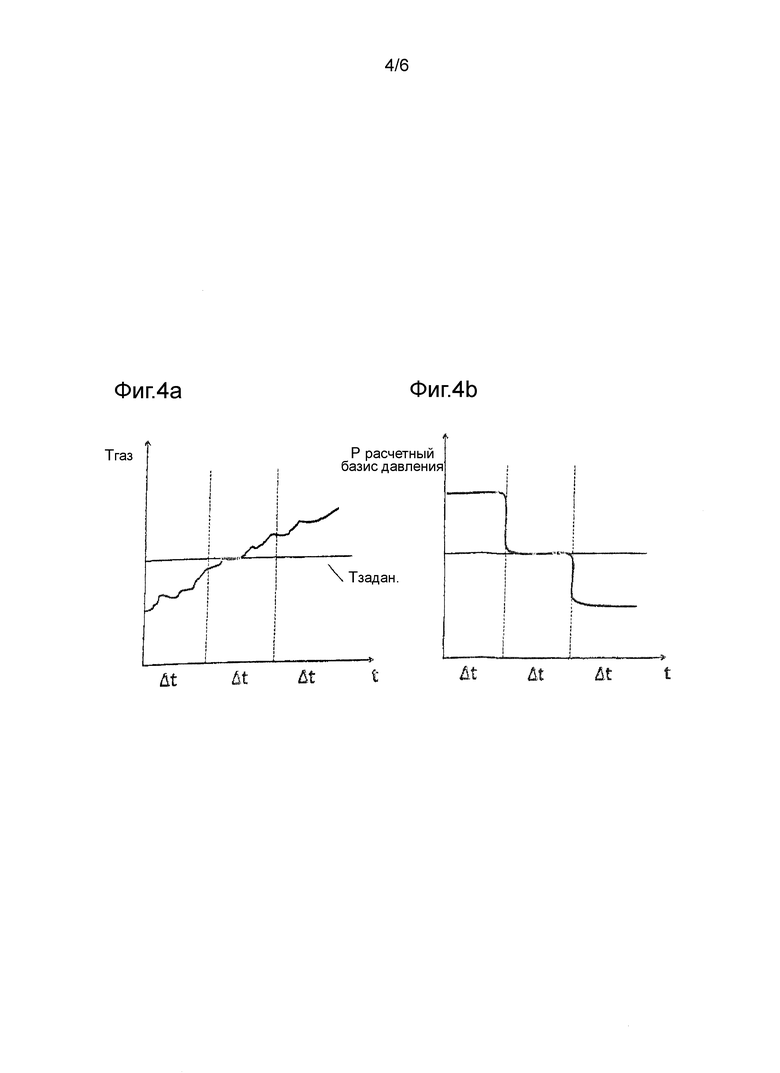
На фиг.4a показана схема, на которой в качестве примера представлен температурный профиль температуры газа в цилиндре для рекуперации энергии.
На фиг.4b показана схема, на которой представлено первичное давление рабочей гидравлики в зависимости от температурного профиля, показанного на фиг.4a.
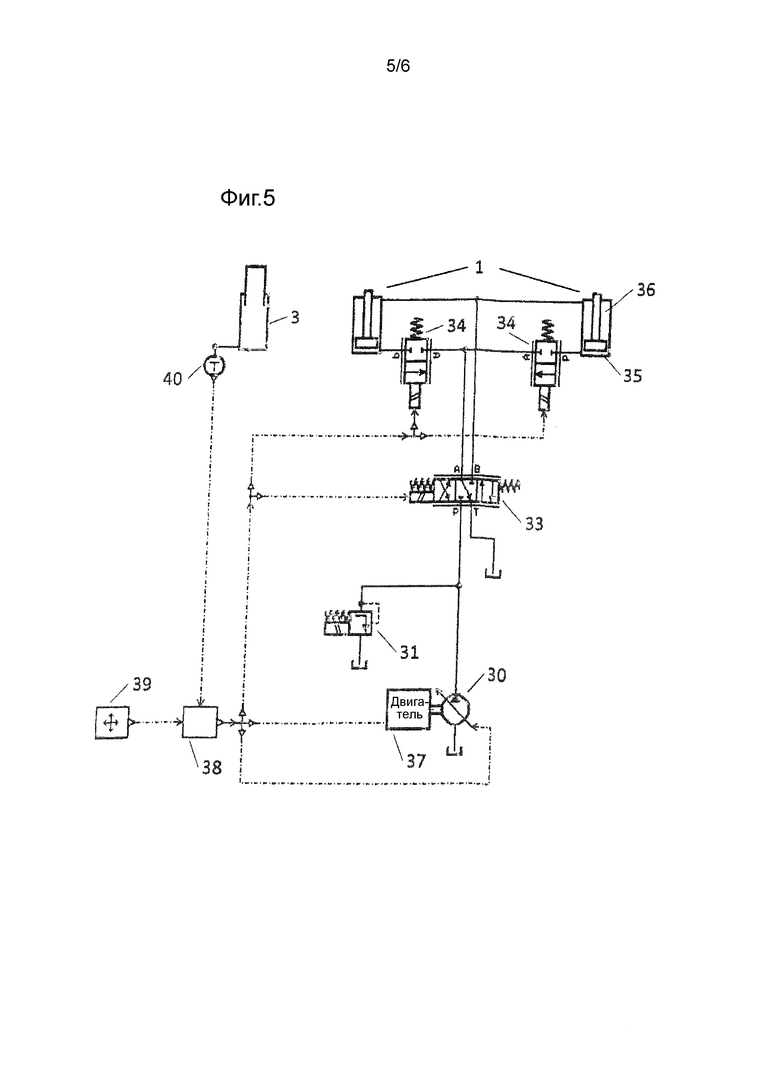
На фиг.5 показан второй примерный вариант выполнения контроллера для рабочего привода согласно изобретению, в котором рабочее динамическое усилие отрегулировано в зависимости от температуры газа в цилиндре для рекуперации энергии, в частности, максимальной скорости движения.
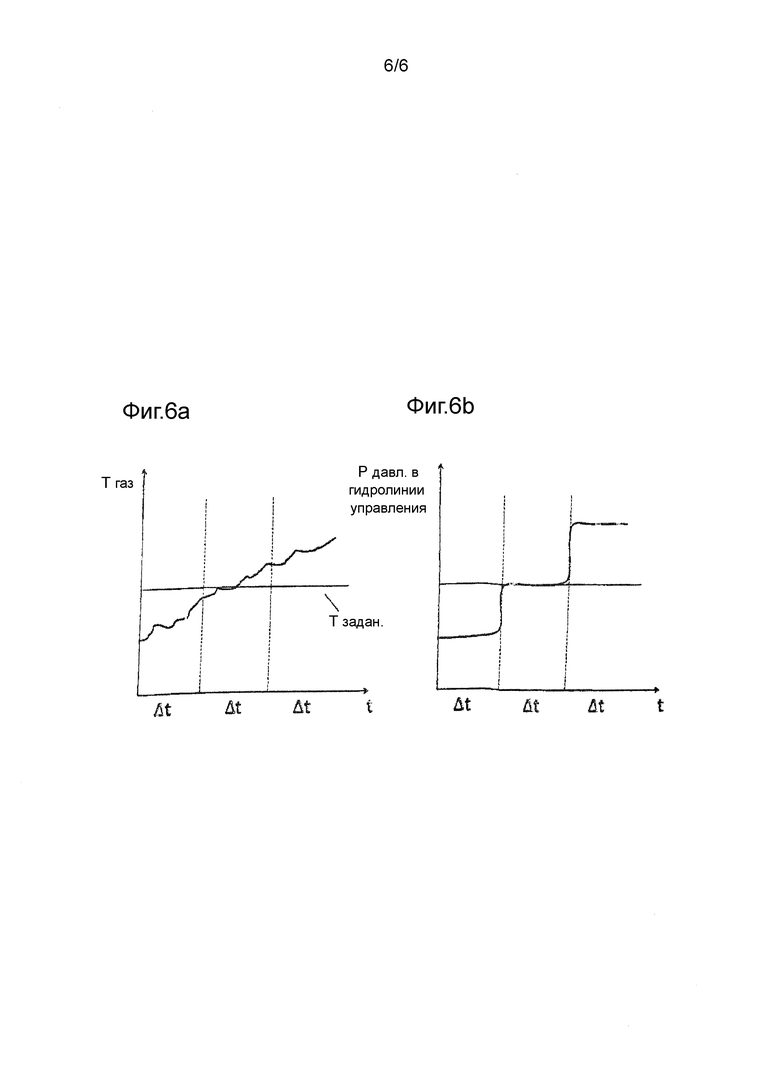
На фиг.6a показана схема, на которой представлен температурный профиль газа в цилиндре для рекуперации энергии.
На фиг.6b показана схема, на которой представлено управляющее давление управляющего клапана для приведения в движение рабочего привода в зависимости от температурного профиля, показанного на фиг.6a.
Теперь со ссылкой на фиг.1 и 2 будет сначала в целом показан примерный вариант выполнения агрегата с цилиндром для рекуперации энергии, в котором может быть использовано настоящее изобретение.
Агрегат содержит подвижный элемент 2, который шарнирно сочленен со сварной конструкцией 4 агрегата с помощью проходящей горизонтально оси 5 поворота. Агрегат представляет собой гидравлический экскаватор, в котором подвижный элемент 2 установлен на стреле экскаватора, которая шарнирно сочленена с верхней платформой экскаватора. Сама верхняя платформа вращательно прикреплена к нижней платформе с шасси на вертикальной оси вращения.
Для перемещения подвижного элемента 2 имеются два рабочих гидравлических цилиндра 1, которые через соответствующие точки сочленения шарнирно сочленены с подвижным элементом 2 и со сварной конструкцией 4 верхней платформы. Кроме того, в соответствии с примерным вариантом выполнения имеется цилиндр 3 для рекуперации энергии согласно изобретению, который подобно рабочим гидравлическим цилиндрам 1 размещен между подвижным элементом 2 и верхней платформой агрегата 4, и служит для рекуперации энергии из движения подвижного элемента. Цилиндр 3 для рекуперации энергии размещен между двумя рабочими гидравлическими цилиндрами 1.
На подвижном элементе 2, в данном случае стреле экскаватора, обычно размещено рабочее оборудование, например, лопата экскаватора. При опускании подвижного элемента 2, потенциальная энергия подвижного элемента и рабочего оборудования теперь должна быть рекуперирована и аккумулирована, с тем, чтобы по меньшей мере частично, компенсировать статические усилия, которые в противном случае будут воздействовать на рабочие гидравлические цилиндры из-за веса подвижного элемента и рабочего оборудования во время движения вверх подвижного элемента и, таким образом, расходовать меньше энергии посредством рабочих гидравлических цилиндров 1. С этой целью, гидравлический цилиндр согласно изобретению предпочтительно включает в себя камеру, наполненную газом. При опускании подвижного элемента, газ в газонаполненной камере цилиндра для рекуперации энергии сжимается, тогда как при подъеме подвижного элемента он расширяется и тем самым способствует усилию рабочих гидравлических цилиндров 1. С этой целью, цилиндр для рекуперации энергии согласно изобретению предпочтительно наполнен газом с нижней стороны, и, кроме того, предпочтительно включает в себя полый поршневой шток, выходящий на нижнюю сторону.
На фиг.2a и 2b показаны схематические чертежи двух вариантов цилиндра 3 для рекуперации энергии. Оба примерных варианта выполнения включают в себя цилиндр 10, в котором аксиально подвижно установлен поршневой шток 11. Поршневой шток 11 имеет форму полого цилиндра, при этом во внутренней части поршневого штока 11 образована полость 13, выходящая на нижнюю сторону 12 цилиндра. Нижняя сторона 12 цилиндра 3 для рекуперации энергии и полость 13 во внутренней части поршневого штока 11 образуют когерентную камеру, которая наполнена находящимся под давлением газом. При движении поршневого штока 11 в цилиндре 10, размер нижней стороны 12 варьируется, так что при полностью втянутом поршневом штоке 11 объем, наполненный газом, по существу соответствует полости 13 во внутренней части полого поршневого штока, тогда как при полностью выдвинутом поршневом штоке он соответствует объему данной полости 13 плюс объем цилиндра 10.
Цилиндр для рекуперации энергии включает в себя нижнюю опорную проушину 15 и штоко-поршневую опорную проушину 16, с помощью которых он шарнирно сочленен с агрегатом и подвижным элементом. Цилиндр для рекуперации энергии шарнирно закреплен между подвижным элементом и агрегатом таким образом, что поршневой шток 11 движется вниз к днищу цилиндра для рекуперации энергии под воздействием веса подвижного элемента и рабочего оборудования, при этом объем газа сжимается. Благодаря конструкции цилиндра для рекуперации энергии согласно изобретению с полым поршневым штоком 11, имеется достаточный объем газа также и при втянутом цилиндре, с тем, чтобы обеспечить плавное увеличение давления при опускании рабочего оборудования. С другой стороны, при движении подвижного элемента вверх, часть веса воздействует на объем газа в цилиндре для рекуперации энергии, так что рабочим гидравлическим цилиндрам более не нужно прикладывать полную статическую нагрузку.
Цилиндр для рекуперации энергии включает в себя наполнительный клапан 17 для наполнения камеры газом и клапан 18 ограничения давления для ограничения давления газа. В первом примерном варианте выполнения согласно фиг.2a, наполнительный клапан 17 и клапан 18 ограничения давления размещены с нижней стороны. Однако во втором примерном варианте выполнения, показанном на фиг.2b, наполнительный клапан 17 и клапан 18 ограничения давления размещены со стороны поршневого штока.
Цилиндры для рекуперации энергии, показанные на фиг.2a и 2b, представляют собой двусторонние гидравлические цилиндры, при этом образовано кольцевое пространство 14, соединенное с гидравлической системой агрегата через канал 12. Нижняя сторона также может включать в себя канал, через который она соединяется с гидравлической системой агрегата.
Как показано на фиг.2b, объем газа в цилиндре для рекуперации энергии может варьироваться при подаче или отводе масла из цилиндра для рекуперации энергии. Во втором примерном варианте осуществления на фиг.2b, соответственно имеется канал 20 для подачи масла, посредством которого нижнее пространство цилиндра для рекуперации энергии соединяется с гидравлической системой агрегата.
Авторы настоящего изобретения обнаружили, что температура газа в цилиндре для рекуперации энергии оказывает значительное воздействие на его работу. Согласно изобретению соответственно предусмотрено, что срабатывание рабочего привода, и в частности, рабочей гидравлики в зависимости от этой температуры, а также сохранение воздействия температуры газа на работу агрегата будет происходить на возможно более низком уровне.
В частности, предусмотрен температурный датчик, который непосредственно или опосредованно измеряет температуру газа в камере, наполненной газом. Предпочтительно, предусмотрен управляющий сигнал для приведения в действие рабочего привода в зависимости от температурного сигнала температурного датчика. Предпочтительно, температурный сигнал усреднен за определенный период времени и использован как входная переменная контроллера.
На фиг.3 показан первый примерный вариант выполнения такой системы управления. Рабочий привод образован двумя рабочими цилиндрами 1, как уже было описано ранее. У каждого из них есть камеры давления 35 и 36, которые соединены с линией подачи давления через управляющий клапан 32. Подача давления осуществляется гидравлическим насосом 30. Первичное давление, создаваемое насосом 30, ограничено клапаном 31 ограничения первичного давления. Предпочтительно, клапан 31 ограничения первичного давления размещен между насосом 30 и управляющим клапаном 32.
Согласно изобретению, теперь имеется температурный датчик 40, установленный на цилиндре 3 для рекуперации энергии, который измеряет температуру газа цилиндра для рекуперации энергии. Например, температурный датчик непосредственно измеряет температуру газа, что дает возможность относительно быстро реагировать на колебания температуры. Однако преимущественным может оказаться опосредованное измерение температуры, поскольку температура газа очень сильно колеблется в зависимости от состояния движения. Температурный сигнал температурного датчика 40 поступает на контроллер 41 в качестве входной переменной, при этом в контроллере сигнал будет обработан. Контроллер 41 приводит в действие регулирующий узел 42 для регулирования клапана 31 ограничения давления. Таким образом, первичное давление рабочей гидравлики может быть отрегулировано в зависимости от температурного сигнала.
Путем такой регулировки первичного давления могут быть решены две проблемы: Когда температура в цилиндре 3 для рекуперации энергии падает ниже определенного заданного значения Тзадан. (например, в начале работы зимой), цилиндр 3 для рекуперации энергии не обеспечивает заданного давления или нужного заданного усилия цилиндра, с тем, чтобы достичь грузоподъемности, достижимой при заданной температуре газа. Для достижения грузоподъемности, несмотря на более низкую температуру газа, предельные величины первичного давления цилиндров стрелы временно увеличиваются согласно изобретению в требуемом и допустимом диапазоне в зависимости от температуры газа. В частности, предельные величины давления могут быть увеличены выше обычного заданного значения, например, 350 бар, с тем, чтобы удержать общую грузоподъемность на нужном заданном значении даже при низких температурах.
Если температура газа поднимается в результате эксплуатационной деятельности или в результате подачи внешнего тепла, предельные величины первичного давления цилиндров стрелы могут быть снова снижены, например, до заданного значения 350 бар.
Однако если температура газа в цилиндре для рекуперации энергии поднимается выше определенного заданного значения, достижимая грузоподъемность увеличится, в силу чего увеличится нагрузка на оборудование, а срок службы уменьшится. Чтобы уравновесить такие повышенные нагрузки на оборудование, предельные величины первичного давления цилиндров стрелы временно снижаются согласно изобретению в зависимости от температуры газа, когда температура поднимается выше определенного заданного значения.
Путем регулировки предельных величин первичного давления цилиндров стрелы в зависимости от температуры газа в цилиндре для рекуперации энергии, может быть обеспечена нужная грузоподъемность, а нагрузка на оборудование может быть ограничена.
Для реализации активации имеется множество различных возможностей. В частности, первичное давление в зависимости от температуры газа в цилиндре для рекуперации энергии может аккумулироваться в контроллере, например, в виде карты. Предпочтительно, срабатывание производится исходя из усредненной температуры газа. В течение определенного временного интервала, может быть определена каждая средняя температура газа и использована в качестве управляющей переменной для предельных величин первичного давления цилиндров стрелы.
На фиг.4a показан примерный температурный график Тгаз в цилиндре для рекуперации энергии по времени, в котором температура сначала лежит ниже заданной температуры Тзадан, а затем поднимается выше этой заданной величины. В примерном варианте выполнения, каждое усреднение производится за временной период ∆t. В первый временной период ∆t, усредненная температура ниже заданной температуры Тзадан, поэтому применено повышенное первичное давление P. В следующий период ∆t, усредненная температура по существу лежит в диапазоне заданной температуры, поэтому использовано обычное первичное давление P. Однако в течение последующих временных периодов ∆t температура лежит выше заданной температуры Тзадан, в силу чего соответственно применено более низкое первичное давление P. Согласно изобретению, вследствие этого для каждого временного интервала определена средняя температура, и для этой температуры отрегулировано соответствующее первичное давление.
Первичное регулируемое давление предпочтительно определяется в зависимости от усилия цилиндра для рекуперации энергии при соответствующей температуре и максимальном допустимом первичном давлении, так, чтобы колебания грузоподъемности агрегата и колебания нагрузки на оборудование из-за температуры в цилиндре для рекуперации энергии были настолько малы, насколько это возможно.
На фиг.5 показан второй примерный вариант осуществления настоящего изобретения, посредством которого воздействие температуры газа на рабочее динамическое усилие агрегата поддерживается настолько малым, насколько это возможно.
Рабочие цилиндры 1, в свою очередь, включают в себя камеры 35 и 36 давления, путем создания давления в которых с помощью гидравлической текучей среды перемещаются рабочие цилиндры 1. Имеется насос 30, который создает в камерах 35 и 36 давления высокое давление через управляющий клапан 33. Этот насос представляет собой насос с объемным регулированием, который активируется через контроллер 38. Насос 30 приводится в действие с помощью двигателя 37 внутреннего сгорания, который сходным образом активируется контроллером 38. Клапан 33 служит для задания направления и скорости движения гидравлических цилиндров 1 по меньшей мере при подъеме. Клапан 33 сходным образом активируется контроллером 38. Кроме того, имеется емкость, в которую может вытекать гидравлическая текучая среда. Для регулировки скорости опускания, предусмотрены клапаны 34, с помощью которых регулируется скорость, с которой гидравлическая текучая среда может вытекать из нижних камер 35 в емкость и, таким образом, может регулироваться скорость опускания. Данные клапаны также активируются через контроллер 38.
Имеется управляющий элемент 39, через который оператор может ввести входные команды для перемещения смещаемого элемента, в частности, стрелы. Эти входные команды обрабатываются в управляющем узле 39 и используются для приведения в действие клапанов, насоса 30 и двигателя 37.
Согласно изобретению, теперь предусмотрен датчик 40 для определения температуры газа в цилиндре 3 для рекуперации энергии, где сигналы измерения температуры датчика 40 подаются в контроллер 38. Приведение в действие функции движения рабочего цилиндра приспособлено к характеристике цилиндра для рекуперации энергии, изменяемой температурой газа, так чтобы воздействие изменений температуры газа на общую характеристику агрегата по меньшей мере частично компенсировалось. В частности, в зависимости от текущей средней температуры газа приведение в действие функции подъема и опускания стрелы выполнено так, что максимальная скорость опускания или подъема стрелы всегда сохраняется одинаковой.
При опускании управляющее давление или электрические управляющие сигналы соответствующих клапанов, в частности клапанов 34 (запорных клапанов), селективно увеличивается или уменьшается в зависимости от температуры газа, с тем, чтобы приспособить максимальное сечение открытия клапана и, таким образом, поддерживать максимальную скорость опускания приблизительно постоянной.
При подъеме управляющее давление или электрические управляющие сигналы соответствующих клапанов, в частности управляющего блока 33, селективно увеличивается или уменьшается в зависимости от температуры газа, с тем, чтобы приспособить сечение открытия клапана и, таким образом, поддерживать максимальную скорость подъема приблизительно постоянной. Кроме того, угол поворота гидравлического насоса 30 и скорость двигателя 37 внутреннего сгорания могут быть селективно отрегулированы.
Путем регулировки управляющего давления или электрических управляющих сигналов в зависимости от температуры газа в энергоаккумулирующем цилиндре, как рабочее динамическое усилие машины, так и составляющая нагрузка могут поддерживаться постоянными. Энергоаккумулирующий цилиндр может функционировать в качестве автаркической системы, поскольку зависимая от температуры подстройка рабочего динамического усилия производится путем модификации существующей гидравлической системы и/или приведением ее в действие.
Предпочтительно, температура газа усреднена и использована в качестве воздействующей переменной. В частности, каждая средняя температура газа определяется в течение определенного временного интервала и используется в качестве управляющей переменной.
На фиг.6a показана схема примерного температурного профиля температуры Тгаз газа в энергоаккумулирующем цилиндре. Как и на фиг.4a, температура в первом временном периоде ∆t лежит ниже заданной температуры Тзадан, в среднем временном периоде ∆t, по существу в диапазоне заданной температуры, и в третьем временном периоде ∆t выше заданной температуры. Соответственно, управляющее давление, показанное на фиг.6d, варьируется для запорных клапанов 34, с помощью которых регулируется скорость опускания. Поскольку рабочий привод (цилиндр стрелы) и газовый цилиндр соединены через стрелу экскаватора, рабочее динамическое усилие рабочего оборудования является результатом взаимодействия газового цилиндра и рабочего привода.
При температуре ниже заданной температуры, соответственно выбрано более низкое управляющее давление в первом временном периоде ∆t, для компенсации меньшего противоусилия цилиндра для рекуперации энергии соответственно более низким управляющим давлением и, следовательно, меньшим максимальным сечением открытия клапана, с тем, чтобы сохранить максимальную скорость опускания постоянной. Однако в среднем временном периоде ∆t выбрано нормальное управляющее давление, поскольку температура по существу соответствует заданной температуре. В третьем временном периоде ∆t, управляющее давление увеличивается, и, следовательно, увеличивается максимальное сечение открытия клапана, с тем, чтобы достичь постоянной скорости опускания рабочего оборудования, с целью компенсации большего противоусилия газового цилиндра в результате более высокой температуры.
При подъеме, подача управляющего давления управляющего клапана 33 производится точно наоборот, с целью компенсации соответственно меньшей скорости подъема при низких температурах или большей скорости подъема при высоких температурах.
Подводя итог вышесказанному, можно, таким образом, отметить, что при подъеме и опускании подвижного элемента, рабочее динамическое усилие агрегата согласно изобретению меняется из-за характеристической кривой «усилие-рабочий ход» цилиндра для рекуперации энергии в зависимости от температуры газа, когда приведение в действие рабочего привода отрегулировано по заданной характеристике цилиндра для рекуперации энергии при заданной температуре.
При температуре газа ниже заданной температуры, достигается большая скорость опускания и меньшая скорость подъема, тогда как при температуре газа больше заданной температуры, достигается меньшая скорость опускания и большая скорость подъема. С одной стороны, составляющая нагрузка возрастает при слишком большой скорости подъема и опускания, но с другой стороны, оператор подвергается большему стрессу при изменении рабочего динамического усилия, и частично, эксплуатационной деятельности, когда расчистка завалов далее невозможна из-за того, что достаточные скорости более недостижимы.
Согласно изобретению, максимальное управляющее давление или электрические управляющие сигналы и, следовательно, максимальные сечения открытия клапана соответственно отрегулированы, с тем, чтобы компенсировать изменение характеристики цилиндра для рекуперации энергии и, таким образом, удержать рабочую скорость рабочего оборудования постоянной. При опускании, максимальное сечение открытия клапана увеличивается при низкой температуре газа. При подъеме, с другой стороны, максимальное сечение открытия клапана увеличивается при более низкой температуре газа, в то время как максимальное сечение открытия клапана уменьшается при более высокой температуре газа. Предпочтительно, приведение в действие функции подъема и опускания стрелы выполнено так, что максимальная скорость опускания или подъема стрелы может поддерживаться постоянной.
Два примерных варианта осуществления настоящего изобретения, которое в первом примерном варианте осуществления по меньшей мере частично, компенсирует воздействие температуры газа на максимальную грузоподъемность, а во втором примерном варианте осуществления, воздействие температуры газа на рабочее динамическое усилие поддерживается насколько можно малым, разумеется, могут сочетаться.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБОРУДОВАНИЕ | 2011 |
|
RU2584705C2 |
| ОБОРУДОВАНИЕ ДЛЯ ЭКСКАВАТОРА ИЛИ МАШИНЫ ДЛЯ ПОГРУЗКИ, РАЗГРУЗКИ И ТРАНСПОРТИРОВКИ МАТЕРИАЛОВ | 2011 |
|
RU2598005C2 |
| РАБОЧЕЕ УСТРОЙСТВО | 2011 |
|
RU2576731C2 |
| РАБОЧЕЕ УСТРОЙСТВО | 2011 |
|
RU2598610C2 |
| РАБОЧАЯ МАШИНА С ГИДРАВЛИКОЙ ДЛЯ РЕКУПЕРАЦИИ ЭНЕРГИИ | 2019 |
|
RU2779211C2 |
| ПОДЪЕМНОЕ УСТРОЙСТВО И СПОСОБ ПОДЪЕМА СТРЕЛЫ СТРОИТЕЛЬНОЙ МАШИНЫ, И СТРОИТЕЛЬНАЯ МАШИНА С ТАКИМ ПОДЪЕМНЫМ УСТРОЙСТВОМ | 2011 |
|
RU2558712C2 |
| ГИДРОПРИВОД НАСОСНОЙ СКВАЖИННОЙ УСТАНОВКИ | 2022 |
|
RU2793863C1 |
| Устройство для аккумулирования сжатого воздуха | 2018 |
|
RU2695165C1 |
| УСТРОЙСТВО ГИДРОПРИВОДА ГИДРАВЛИЧЕСКОЙ НАСОСНОЙ УСТАНОВКИ И СООТВЕТСТВУЮЩАЯ ГИДРАВЛИЧЕСКАЯ НАСОСНАЯ УСТАНОВКА | 2014 |
|
RU2673641C2 |
| ЗАЩИТНОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2010 |
|
RU2523870C2 |
Изобретение относится к агрегату, в частности экскаватору или перегружателю материалов, с элементом, приводимым в действие с помощью по меньшей мере одного рабочего привода, в котором имеется по меньшей мере один цилиндр для рекуперации энергии. Агрегат содержит систему для непосредственного или опосредованного определения температуры газа в камере, наполненной газом. Приведение в действие рабочего привода осуществляется в зависимости от определяемой температуры газа. Максимальное усилие рабочего привода регулируется в зависимости от температурного сигнала, подаваемого указанной системой. Способ управления агрегатом включает непосредственное или опосредованное определение температуры газа в камере, наполненной газом. Приведение в действие рабочего привода осуществляют в зависимости от этой непосредственно или опосредованно определенной температуры газа и максимальное усилие рабочего привода регулируют в зависимости от температурного сигнала, подаваемого при указанном определении температуры газа. Агрегат включает цилиндр для рекуперации энергии и/или контроллер для рабочего привода агрегата. 3 н. и 5 з.п. ф-лы, 9 ил.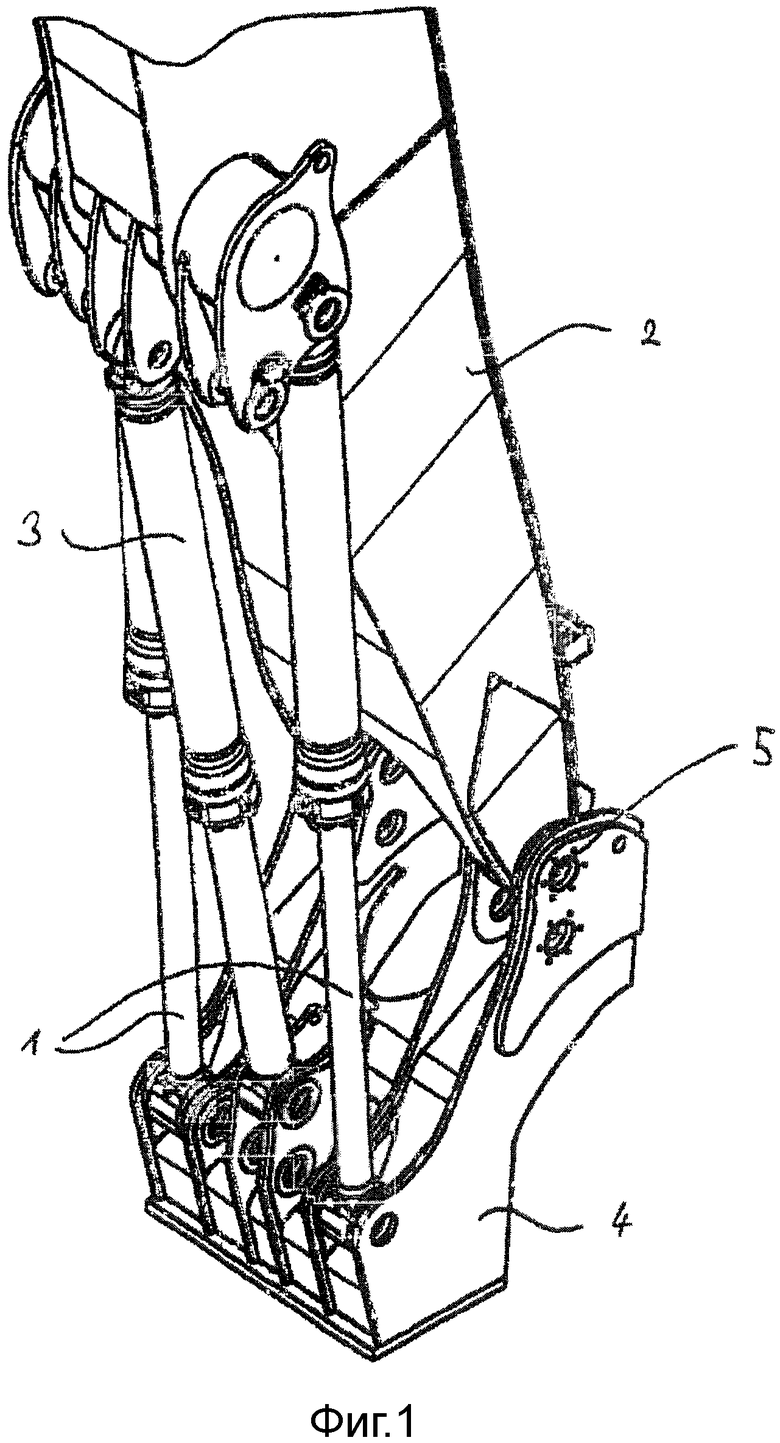
1. Агрегат, в частности экскаватор или погрузочно-разгрузочное устройство, с элементом, приводимым в действие с помощью по меньшей мере одного рабочего привода, в котором имеется по меньшей мере один цилиндр для рекуперации энергии, служащий для рекуперации энергии из движения подвижного элемента и включающий в себя камеру, наполненную газом,
отличающийся тем, что
он содержит систему для непосредственного или опосредованного определения температуры газа в камере, наполненной газом, при этом приведение в действие рабочего привода осуществляется в зависимости от определяемой температуры газа, и максимальное усилие рабочего привода регулируется в зависимости от температурного сигнала, подаваемого указанной системой.
2. Агрегат по п. 1, который содержит контроллер, и в котором температурный сигнал усредняется за определенный период времени и используется в качестве входной переменной контроллера.
3. Агрегат по п. 1, в котором рабочее динамическое усилие рабочего привода регулируется в зависимости от температурного сигнала.
4. Агрегат по п. 1, в котором рабочий привод содержит по меньшей мере один рабочий гидравлический цилиндр, при этом приведение в действие гидравлики рабочего гидравлического цилиндра осуществляется в зависимости от температурного сигнала.
5. Агрегат по п. 4, в котором первичное давление гидравлики рабочего привода регулируется в зависимости от температурного сигнала, в частности, путем приведения в действие клапана ограничения первичного давления.
6. Агрегат по п. 4 или 5, в котором рабочее динамическое усилие гидравлики рабочего гидравлического цилиндра регулируется в зависимости от температурного сигнала, в частности, путем регулировки управляющего давления и/или управляющего тока клапанов для подъема и/или опускания подвижного элемента и/или путем приведения в действие рабочего насоса и/или приводного двигателя.
7. Способ управления агрегатом по любому из пп. 1-6, с элементом, приводимым в действие с помощью по меньшей мере одного рабочего привода, в котором имеется по меньшей мере один цилиндр для рекуперации энергии, служащий для рекуперации энергии из движения подвижного элемента и включающий в себя камеру, наполненную газом, отличающийся тем, что
осуществляют непосредственное или опосредованное определение температуры газа в камере, наполненной газом,
при этом приведение в действие рабочего привода осуществляют в зависимости от этой непосредственно или опосредованно определенной температуры газа, и максимальное усилие рабочего привода регулируют в зависимости от температурного сигнала, подаваемого при указанном определении температуры газа.
8. Цилиндр для рекуперации энергии и/или контроллер для рабочего привода агрегата по любому из пп. 1-6.
| СИСТЕМА ГИДРАВЛИЧЕСКОГО ПРИВОДА ДЛЯ МАСЛЯНОГО НАСОСА ДЛЯ СКВАЖИН | 1993 |
|
RU2117823C1 |
| Позиционный пневмопривод | 1989 |
|
SU1642100A1 |
| RU 2007123290 A, 27.12.2008 | |||
| Насосно-аккумуляторный привод одноковшовых экскаваторов и других машин цикличного действия | 1956 |
|
SU121082A1 |
| Гидропривод одноковшового экскаватора с рекуперацией энергии | 1986 |
|
SU1382920A1 |
| EP 1092878 A1, 18.04.2001. | |||

