05 Ј ЬО
Изобретение относится к машиностроению, в частности к пневматическим исполнительным системам, и может быть использовано в качестве привода в автоматизированном производственном оборудовании.
Цель изобретения - повышение быстродействия пневмопривода.
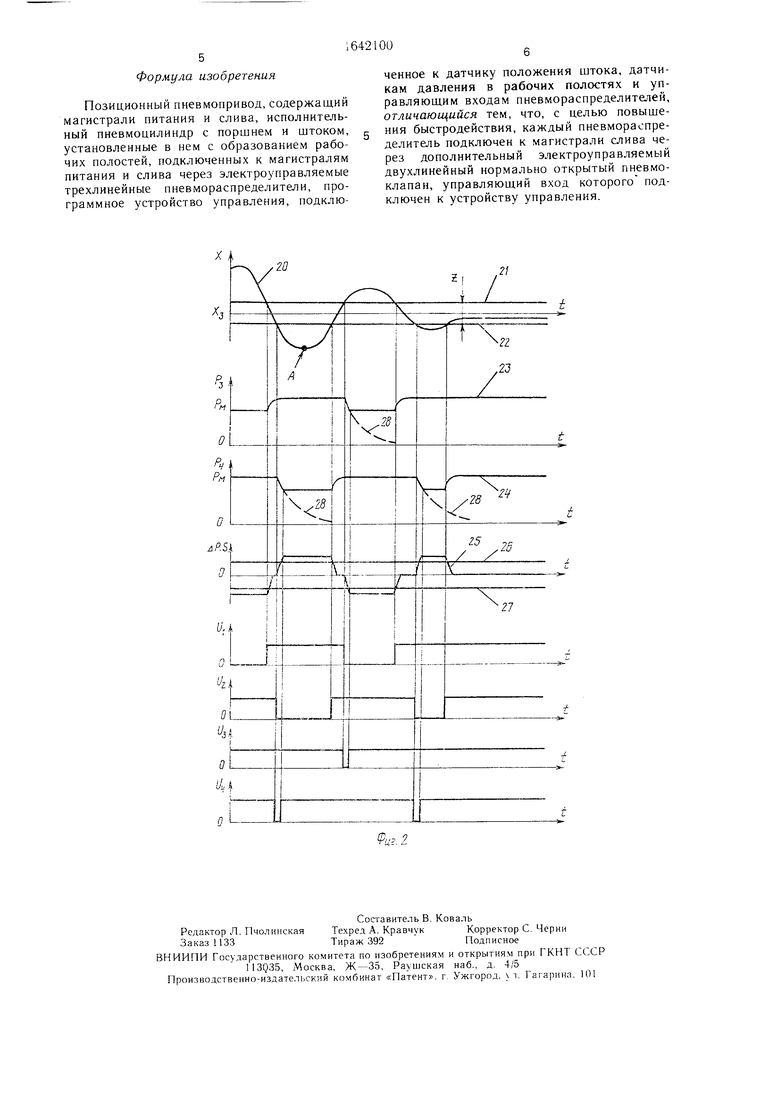
На фиг. 1 представлена принципиальная схема позиционного пневмопривода; на фиг. 2 - временные диаграммы перемещения поршня X(t) и изменения давлений в рабочих п---)стях P.-j(t) и 4(t) и циклограммы pi1 ты электроуправляемых пневморас- предели гелей и пневмоклапанов в функции времени ( при 3-позиционном законе управления пневмоприводом.
Позиционный пневмопривод содержит магистрали 1 и 2 питания и слива, исполнительный пневмоцилиндр 3 с поршнем 4 и штоком 5, установленные в нем с образованием рабочих полостей 8 и 7 электро- управляемые трехлинейные пневмораспреде- лители 8 и 9, программное устройство 10 управления, подключенное к датчику 11 положения штока 5, датчикам 12 и 13 давления и управляющим входам 14 и 1 } пневмо- распределителей 8 и 9, которые подключены к магистрали 2 слива через электро- управляемые двухлинейные нормально открытые пневмоклапаны К и 17, управляющие входы 18 и 19 которых подключены к устройству 10 управления, вырабатывающему сигналы управления Ui, LJ2, Ь з и LU.
На фиг. 2 кривая 20 является графиком переходного процесса колебательного позиционирования поршня 4 X(t). Программно- заданная координата позиционирования обозначена Х«.. Прямые 21 и 22 ограничивают программно-заданную область позиционирования Z (при 3-позиционном законе управления приводом). Графики 23 и 24 являются временными зависимостями давлений РЛО и P.i(t) в полостях 6 и 7. График 25 отражает динамику усилия Д-Р- S на поршне 4 (где ДР - разность давлений Р,; и S - активная площадь поршня 4). прямые 26 и 27 - величину силы трения в приводе при страгивании и движении поршня 4 в одау и в другую стороны. Пунктирной линией 28 обозначен график изменения давления в выхлопной полости 6 или 7 без ее; отсечения от магистрали 2 слива. На остальных графиках приведены циклограммы работы пневмо- распределителей 8 и 9 и пневмоклапанов 16 и 17 в виде временных диаграмм управляющих сигналов.
Позиционный пневмопривод работает следующим образом.
После выхода поршня 4 со штоком 5 в некоторую окрестность точки X, с погрешностью, большей, чем
±f
осуществляется
режим точного позиционирования. Текущая
0
координата штока 5 измеряется датчиком 11. Для перемещения поршня 4 со штоком 5 к точке X. в случае, когда текущая координата штока X превышает X. пневмораспредели- тель 8 отключен, а пневмораспределитель 9 включен. При этом полость 7 находится в насыщении. В полости 6 при ее запирании в необходимый момент пневмоклапаном 16 поддерживается давление РЗ. Усилие на поршне А- Р- S превышает силу трения (пря- 10-20%. По достижении поршмая 26) на
4 со штоком 5 координаты
нем
1
0
(ограниченной прямой 21) пневмораспреде- ji/итель 8 включается и подает магистральное давление питания в полость 6, которая быстро входит в насыщение. При этом пневмоклапан 16 отключается. Когда кинетическая энергия подвижных частей привода при движении назад (см. фиг. 2) в точке
X
тг
больше, чем работа силы трении в
5
0
5
0
5
и
.приводе на участке перемещения Z, поршень 4 со штоком 5 пересекает програм-мно- заданную область Z и выходит из нее. Для реверса поршня 4 со штоком 5 пневмо- распределитель 9 отключается и через отключенный двухлинейный пневмоклапан 17 соединяет полость 7 с магистралью 2. В полости 7 происходит интенсивное падение давления. Датчик 13 давления передает текущее значение давления в управляющее устройство 10. По достижении давлением Р значения, когда АР- S больше силы трения {прямая 27) на 10--20%, подае я сигнал па чневмоклапа : 17. Он отсекает пслоаь 7 от магистрали 2. Когда установление указанной разности давлений в полостях 6 и 7 происходит до остановки штокг 5 (точка А на фиг. 2), выстоя штока 5 с этой точке нет (как показано на фиг. 2); в противном случае выстой имеет ненулевую длительность, обусловленную накоплением необходимости разности давлений в полостях 6 и 7 (этот сличай на фиг. 2 не показан). 3 дальнейшем управление приводом продолжается аналогично до полной остановки поршня 4 со штоком 5 внутри области Z, что соответствует завершению переходного процесса по- зишюпчрсвания.
Быстрый выхлоп рабочего тела из полости 6 или 7 в атмосфер} с последующей отсечкой этой полости 6 или 7 магистрали 2 слива на уровне давления, обеспечивающего страгивание поршня 4 при его реверсе, исключает или существенно (в 3-5 раз) сокращает выстой поршня 4 в точках остановки при его точном колебательном позиционировании. Это сокращает длительность процесса точного позиционирования и повышает общее быстродействие позиционного пневмопривода.
Формула изобретения
Позиционный пневмопривод, содержащий магистрали питания и слива, исполнительный пневмоцилиндр с поршнем и штоком, установленные в нем с образованием рабочих полостей, подключенных к магистралям питания и слива через электро-правляемые трехлинейные пневмораспределители, программное устройство управления, подключенное к датчику положения штока, датчикам давления в рабочих полостях и управляющим входам пневмораспределителен, отличающийся тем, что, с целью повышения быстродействия, каждый пневмораспре- делитель подключен к магистрали слива через дополнительный электроуправляемый двухлинейный нормально открытый пневмо- клапан, управляющий вход которого подключен к устройству управления.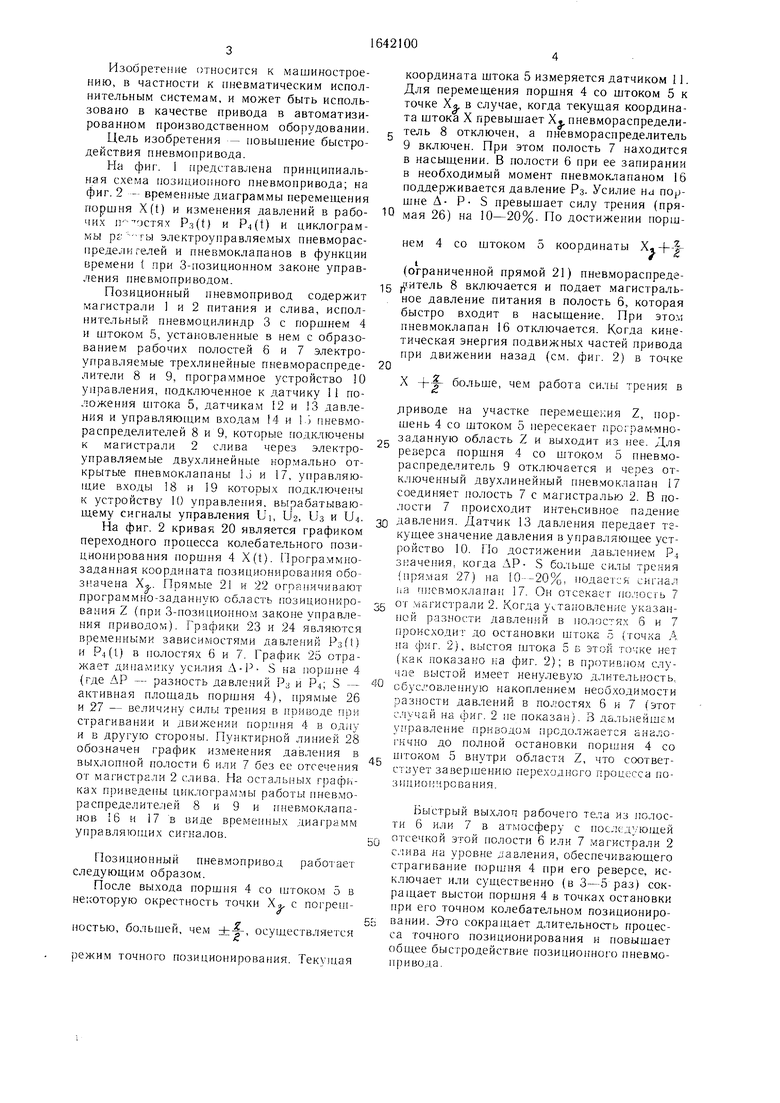
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический следящий привод | 1988 |
|
SU1572990A1 |
| Пневматический привод | 1988 |
|
SU1596142A1 |
| Пневмопривод | 1989 |
|
SU1665114A1 |
| Устройство для промывки гидросооружений от наносов | 1990 |
|
SU1723242A1 |
| Пневмопривод | 1988 |
|
SU1583670A1 |
| Комбинированный тормозной пневмопривод тягача | 1985 |
|
SU1281460A1 |
| Позиционный пневматический привод | 1988 |
|
SU1536090A1 |
| Устройство для отделения заготовок от стопы | 1986 |
|
SU1360862A1 |
| Пневматический инъектор | 1983 |
|
SU1196008A1 |
| Гидравлический экскаватор для образования траншей под защитой тиксотропного раствора | 1987 |
|
SU1461841A1 |
Изобретение м. б. использовано в автоматизированном производственном оборудовании. Цель изобретения - повышение быстродействия. Снабжение позиционного пневмопривода двумя электроуправляемыми нормально открытыми пневмоклапанами 16 17, подключенными к пневмораспределите- лям 8, 9 и магистрали 2 слива, снижает инерционные задержки и значительно сокращает или полностью устраняет выстой поршня 4 в точках остановки при его точном колебательном позиционировании Это достигается быстрым изменением перепада давлений в полостях 6, 7 пневмоцилиндра 3, обеспечивающим страгивание поршня 4 еще до его остановки в амплитудной точке траектории каждого полупериода колебаний 2 ил
2
| Филипов И | |||
| Б | |||
| Тормозные устройства пневмоприводов промышленных роботов | |||
| - Обзор | |||
| - М.: НИИМаш, 1984, с | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
