ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству привода вибрационного типа, а также к устройству двухмерного привода, устройству коррекции размытости изображения, сменному объективу, устройству захвата изображения и автоматическому предметному столику, включающим в себя устройство привода вибрационного типа.
УРОВЕНЬ ТЕХНИКИ
В настоящее время разработано большое количество устройств привода вибрационного типа, которые возбуждают колебания в вибраторе для перемещения подвижного тела, которое находится в прижимном контакте с ним. Они позиционируются как важные функциональные компоненты особенно в оптических устройствах, которые должны производить точные операции. Примером этого может служить устройство двухмерного привода, в котором размещается множество устройств привода вибрационного типа с возможностью линейного перемещения (то есть с возможностью линейного перемещения подвижного тела), и их операции привода объединяются, чтобы обеспечить двухмерное перемещение подвижного тела. Другим примером является устройство коррекции размытости изображения, использующее устройство двухмерного привода (смотри PTL 1).
Однако способ объединения операций привода, выполняемых множеством устройств привода вибрационного типа, имеет следующие важные технические задачи, которые необходимо решить.
Например, направление перемещения подвижного тела и направление движения некоторых из множества устройств привода вибрационного типа иногда пересекаются под прямым углом или под углами, близкими к прямым углам, в зависимости от направления перемещения подвижного тела. В этом случае, не только устройство привода вибрационного типа, чье направление движения пересекает направление перемещения под прямым углом или углами, близкими к прямым углам, не может вносить свой вклад в движение, но и сила трения из-за контакта между подвижным телом и устройством привода вибрационного типа оказывает нагрузку на перемещение подвижного тела, вызывая потери энергии, что приводит к потерям на выходе. Это может привести к ухудшению характеристик при использовании, например, устройства двухмерного привода, устройства коррекции размытости изображения, сменного объектива, устройства захвата изображения или автоматического предметного столика.
Чтобы решить эти задачи, в PTL 1 раскрыта конфигурация, имеющая механизм перемещения (механизм отклонения), который позволяет перемещать вибратор в направлении (в направлении отклонения), пересекающем направление движения. Это предотвращает перемещение вибратора и подвижного тела относительно друг друга в направлении отклонения. При формировании механизма отклонения из направляющего механизма, имеющего исключительно маленькие потери скольжения или упругую пружину, имеющую низкую жесткость, нагрузку, которая действует на подвижное тело, можно сделать чрезвычайно маленькой. Это значительно уменьшает потери на выходе.
Перечень цитируемой литературы
Патентная литература
PTL 1: выложенный патент Японии № 2012-44832
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача
Однако блок уменьшения потерь на выходе для устройства привода вибрационного типа, устройства двухмерного привода или устройства коррекции размытости изображения, описанного выше, главным образом, имеет следующие три задачи при выполнении операции перемещения вибратора в направлении отклонения (операции пересечения).
Первая задача состоит в том, что устройство привода вибрационного типа требует дополнительной ускоряющей силы и замедляющей силы из-за массы вибратора во время ускорения и замедления, так как вибратор также перемещается в дополнение к перемещению подвижного тела. Эти силы вызывают уменьшение силы, действующей на подвижное тело, что приводит к потере мощности, передаваемой подвижному телу.
Вторая задача состоит в том, что элемент источника питания для подачи питания на вибратор перемещается вместе с вибратором. Например, если элемент источника питания представляет собой гибкую печатную плату, существует вероятность того, что могут, например, повреждаться провода из-за деформации.
Третья задача состоит в том, что необходимо обеспечить пространство, в котором могут перемещаться вибратор и элемент источника питания, увеличивая тем самым размер устройства.
Аспект настоящего изобретения относится к устройству двухмерного привода вибрационного типа, устройству привода, устройству коррекции размытости изображения, сменному объективу, устройству захвата изображения или автоматическому предметному столику, в которых можно уменьшить потери на выходе без возникновения трех вышеупомянутых задач.
Решение задачи
Аспект настоящего изобретения относится к устройству привода вибрационного типа, включающему в себя: вибратор, включающий в себя устройство электромеханического преобразования энергии; приводное тело, расположенное между вибратором и подвижным телом и приводимое в движение в первом направлении посредством вибратора; и механизм перемещения, который позволяет перемещать подвижное тело во втором направлении относительно приводного тела, в котором второе направление представляет собой направление, пересекающее первое направление в плоскости, параллельной плоскости, где вибратор и приводное тело находятся в контакте друг с другом.
Дополнительные признаки настоящего изобретения станут очевидными из последующего описания примерных вариантов осуществления со ссылкой на прилагаемые чертежи.
Полезные эффекты изобретения
Согласно настоящему изобретению потери на выходе устройства привода вибрационного типа, устройства двухмерного привода, устройства коррекции размытости изображения, сменного объектива, устройства захвата изображения или автоматического предметного столика можно снизить, не побуждая вибратор выполнять операцию пересечения. Таким образом, можно решить задачи, связанные с потерями на выходе из-за ускорения и замедления вибратора, с возможностью повреждения проводов элемента источника питания и увеличения размера устройства из-за пространства, в котором может перемещаться вибратор и элемент источника питания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
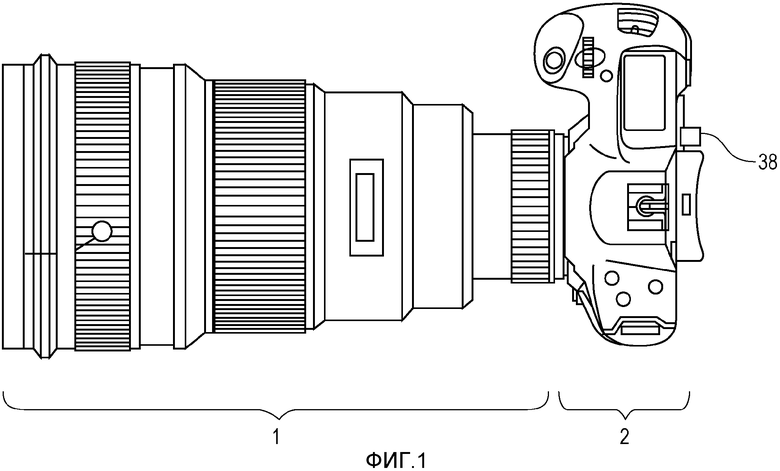
Фиг. 1 - схема устройства захвата изображения.
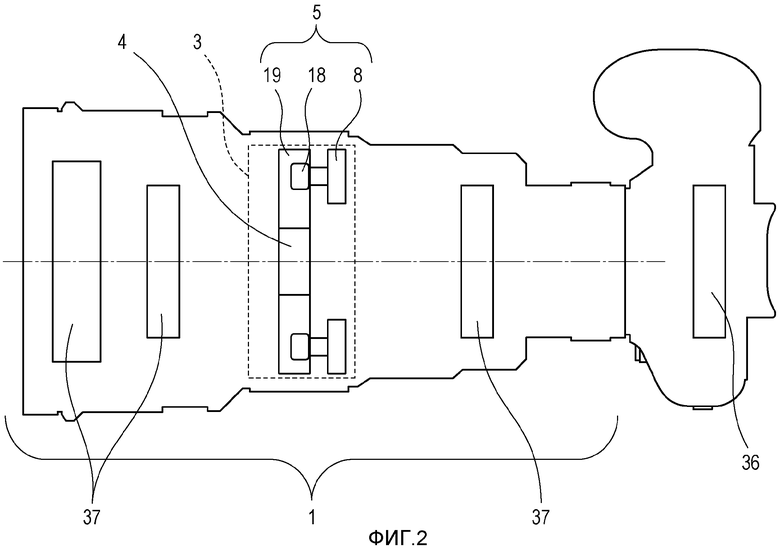
Фиг. 2 - схематичное изображение внутренней части оправы объектива.
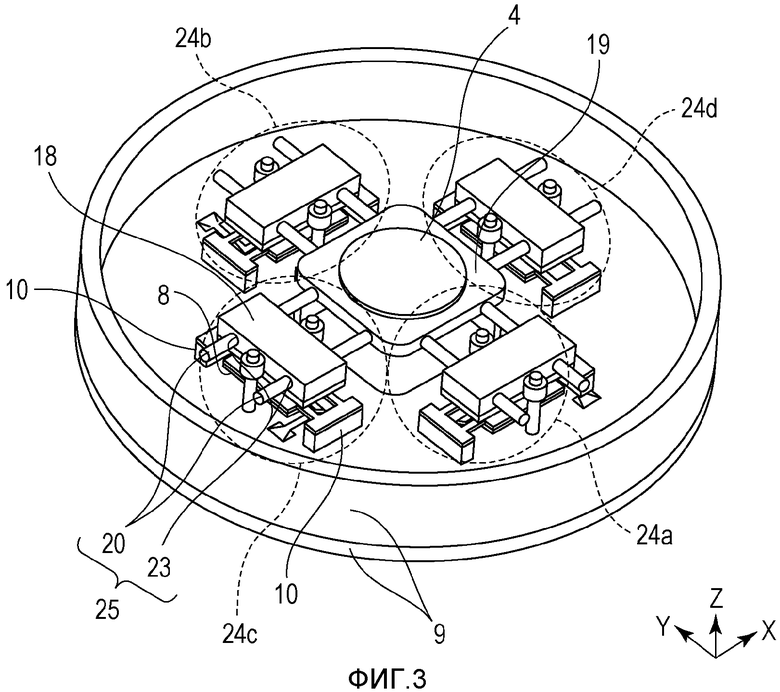
Фиг. 3 - вид в перспективе устройства коррекции размытости изображения.
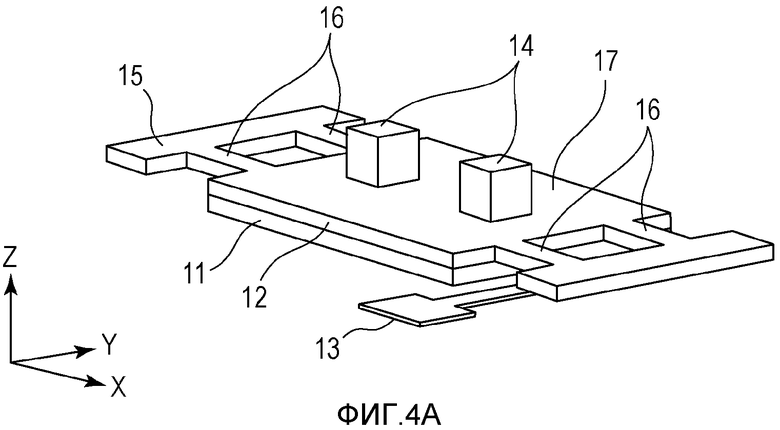
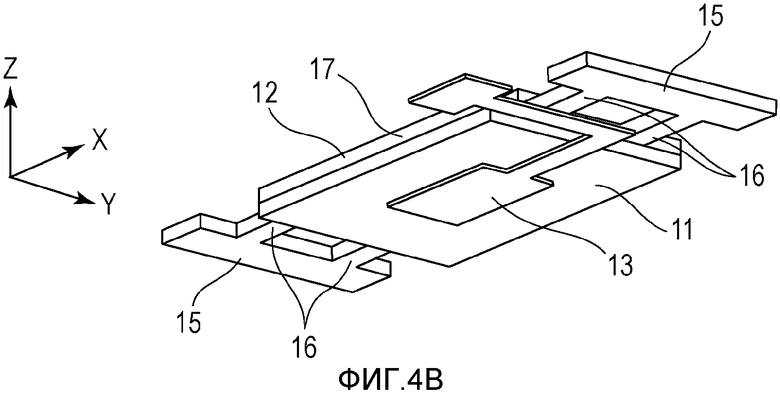
Фиг. 4А - вид в перспективе вибратора.
Фиг. 4В - вид в перспективе вибратора.
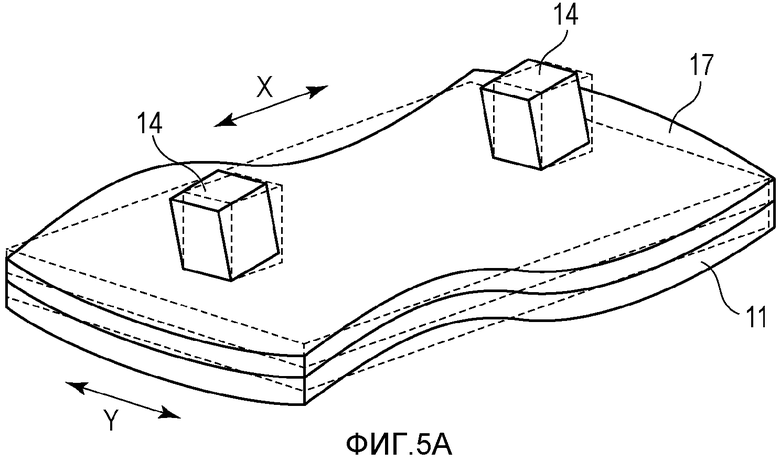
Фиг. 5A - схема, работающая в режиме вибрации.
Фиг. 5B - схема, работающая в режиме вибрации.
Фиг. 6 - вид в перспективе устройства привода вибрационного типа.
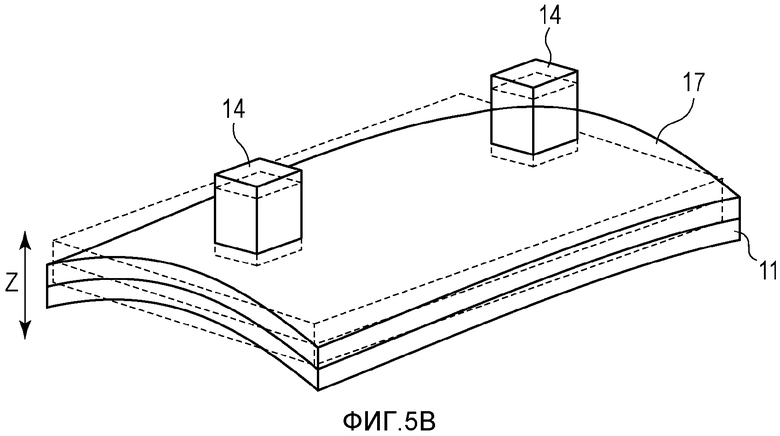
Фиг. 7 - вид спереди устройства коррекции размытости изображения.
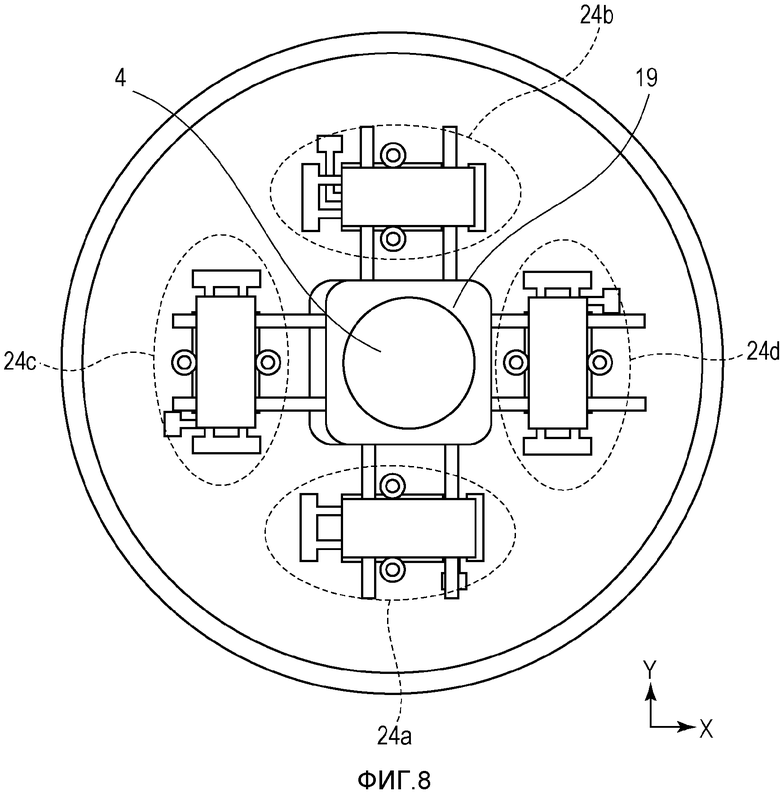
Фиг. 8 - вид спереди устройства коррекции размытости изображения, показывающий его работу.
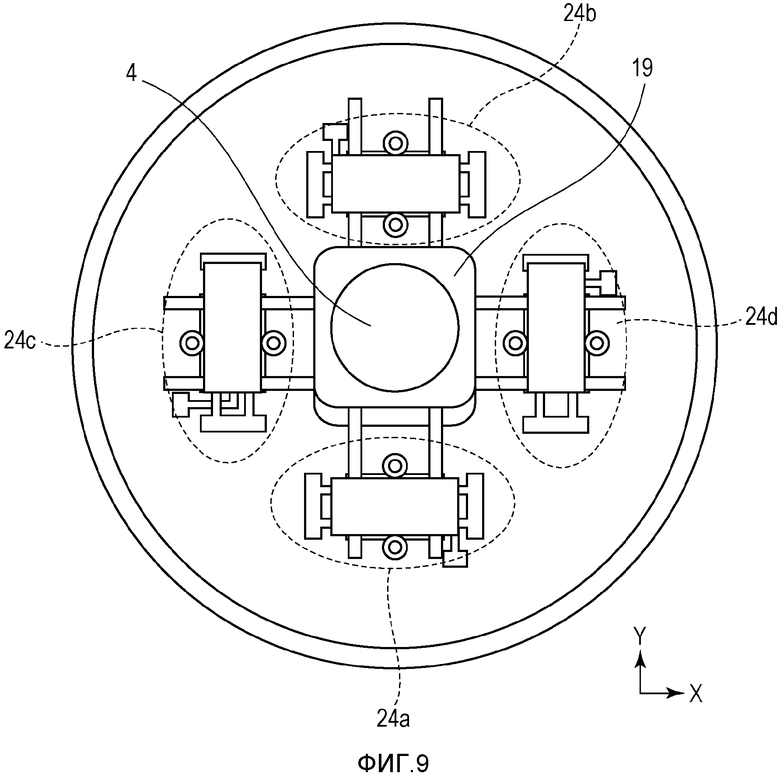
Фиг. 9 - вид спереди устройства коррекции размытости изображения, показывающий его работу.
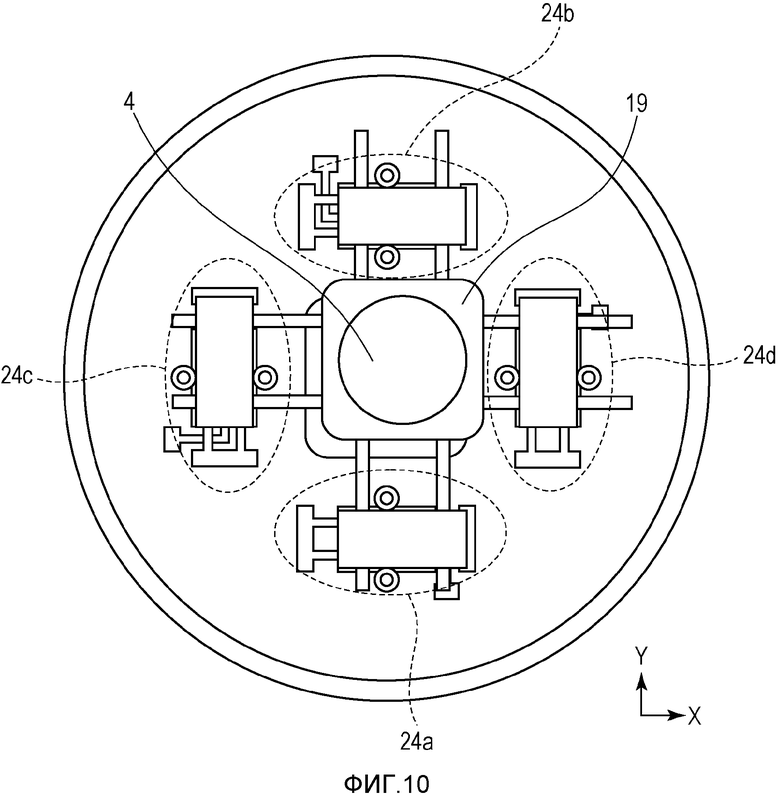
Фиг. 10 - вид спереди устройства коррекции размытости изображения, показывающий его работу.
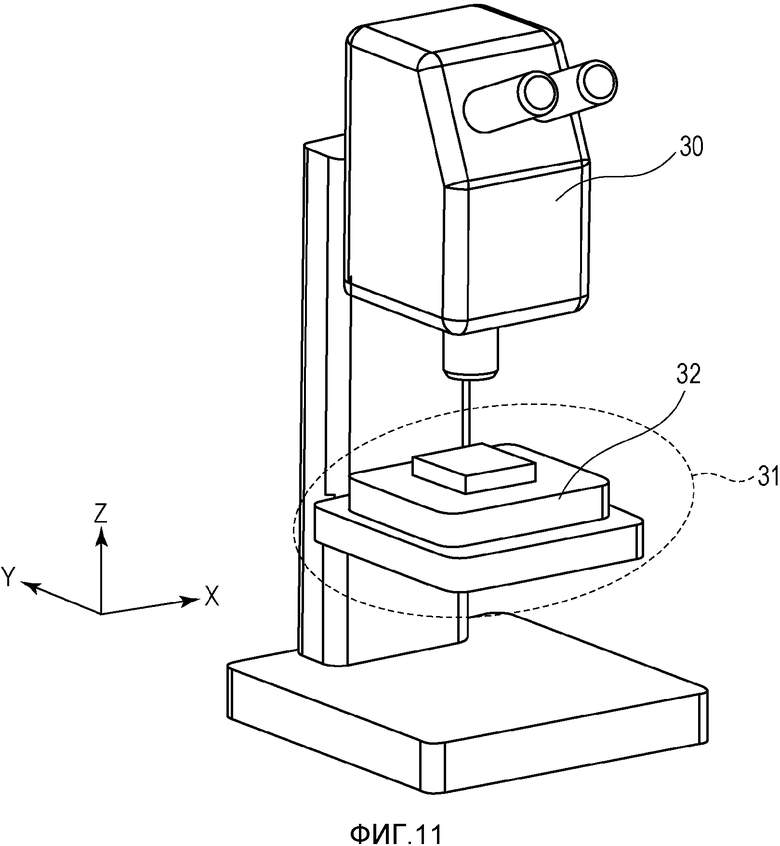
Фиг. 11 - вид в перспективе микроскопа, который служит в качестве устройства захвата изображения.
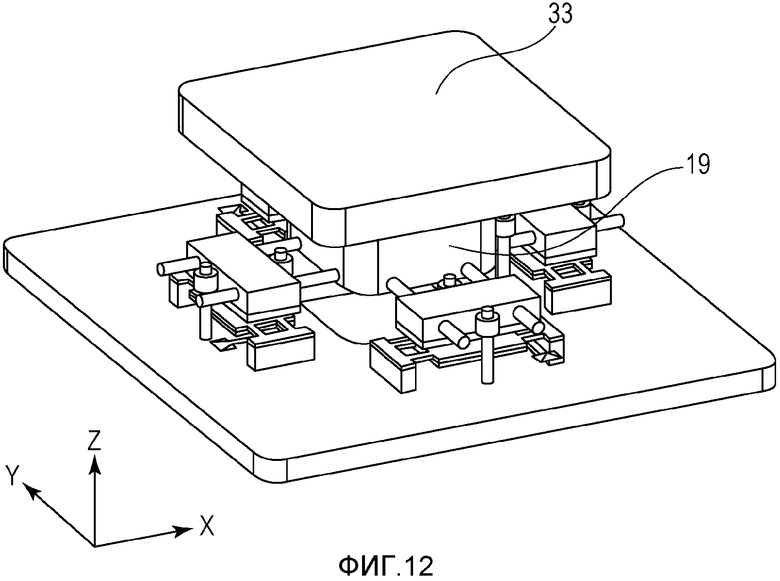
Фиг. 12 - вид в перспективе устройства двухмерного привода.
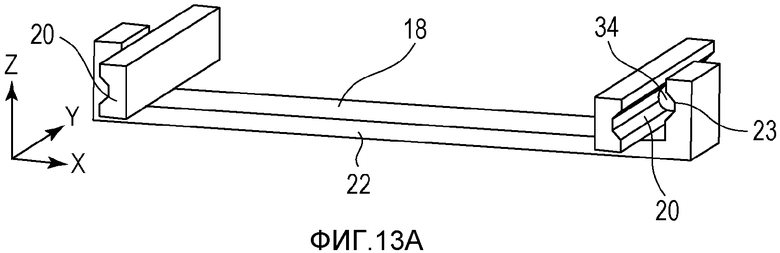
Фиг. 13А - вид в перспективе механизма перемещения и приводное тело.
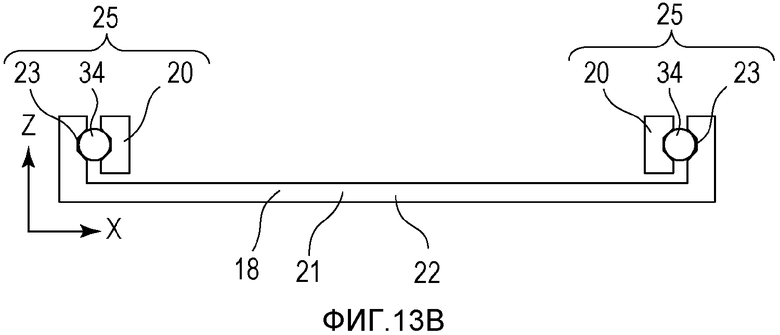
Фиг. 13B - вид спереди механизма перемещения и приводное тело.
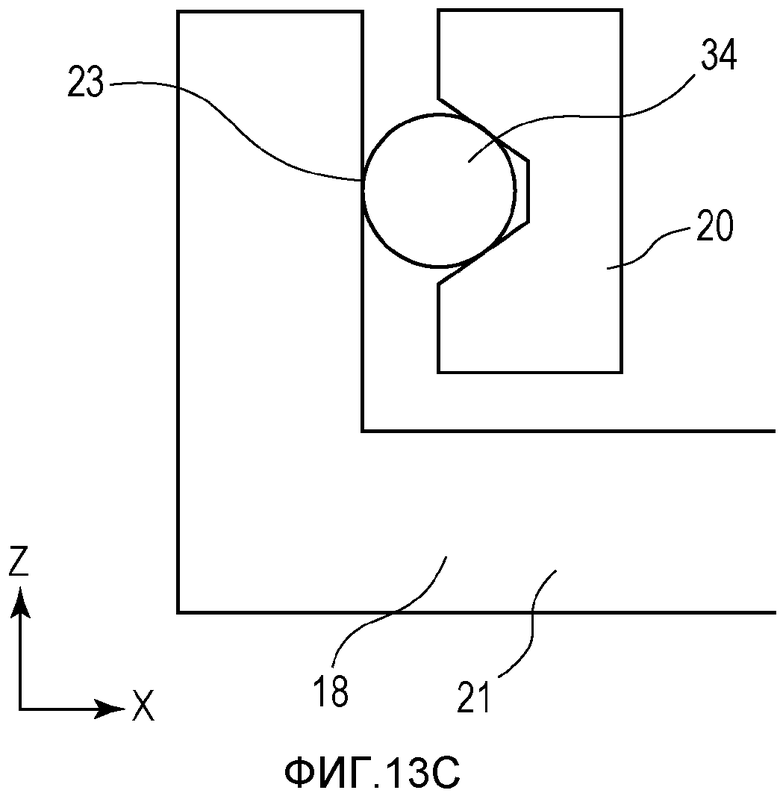
Фиг. 13C - частично увеличенный вид спереди механизма перемещения.
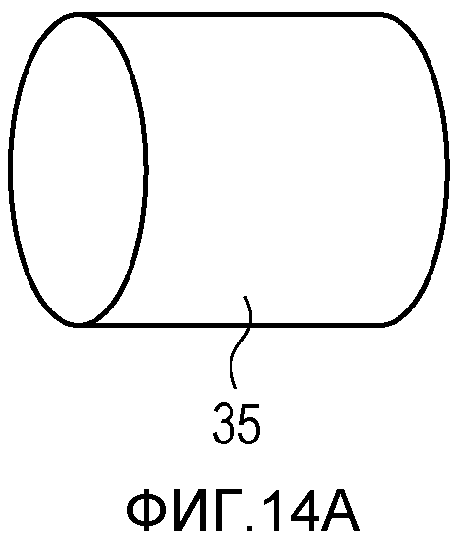
Фиг. 14A - схема другой конфигурации механизма перемещения.
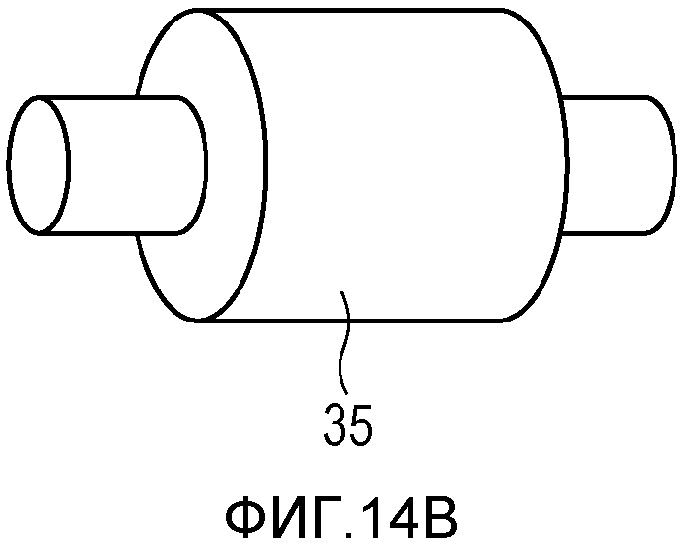
Фиг. 14В - схема другой конфигурации механизма перемещения.
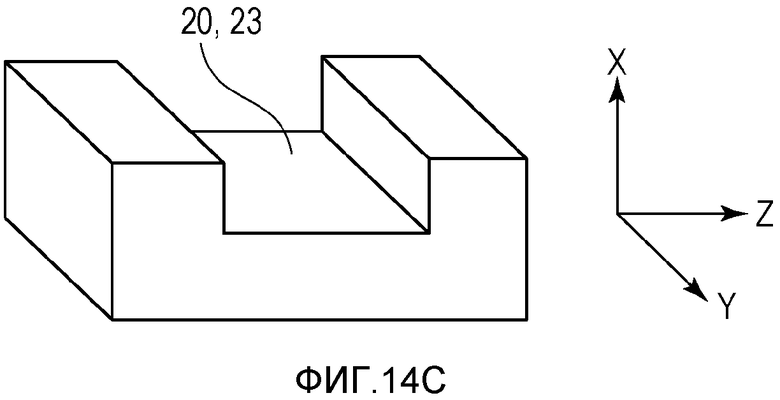
Фиг. 14С - схема другой конфигурации механизма перемещения.
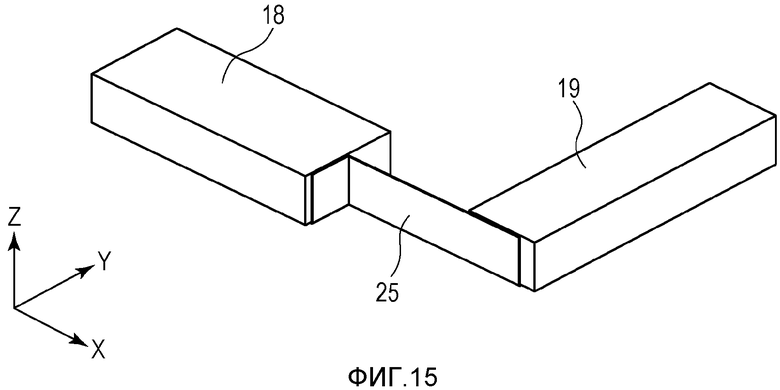
Фиг. 15 - вид в перспективе механизма перемещения, части подвижного тела и приводного тела.
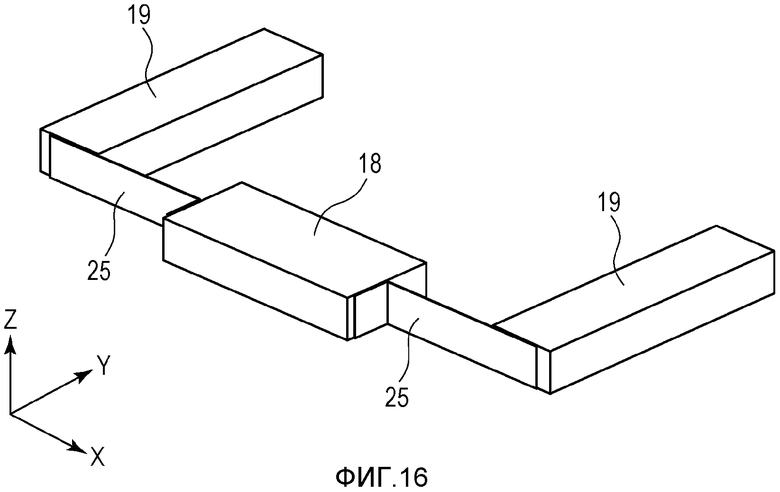
фиг. 16 - вид в перспективе механизмов перемещения, части подвижных тел и приводного тела.
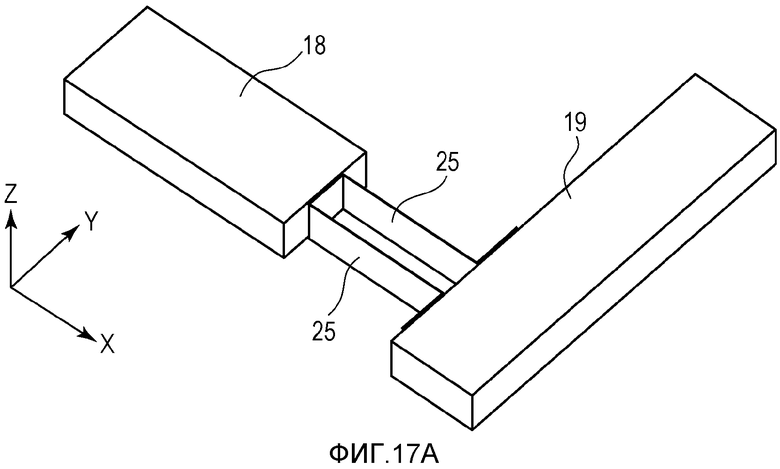
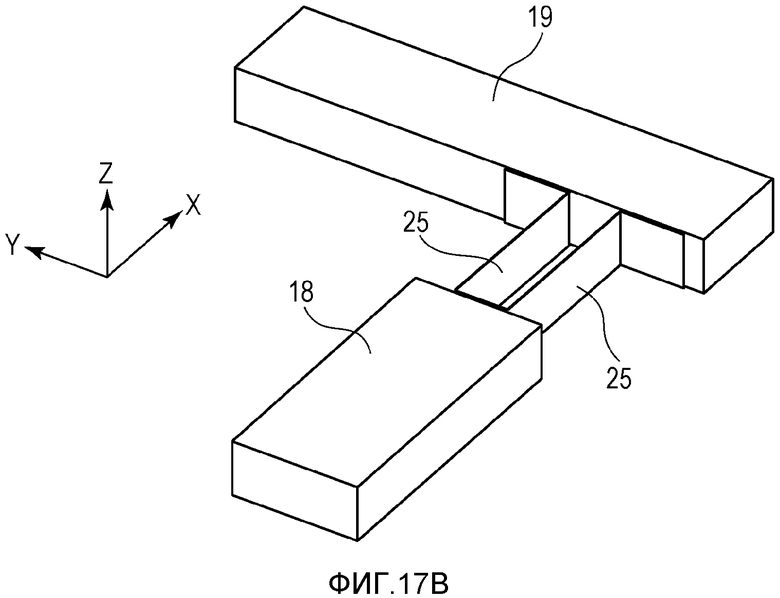
Фиг. 17А - вид в перспективе подвижных механизмов, части подвижного тела и приводного тела.
Фиг. 17B - вид в перспективе подвижных механизмов, части подвижного тела и приводного тела.
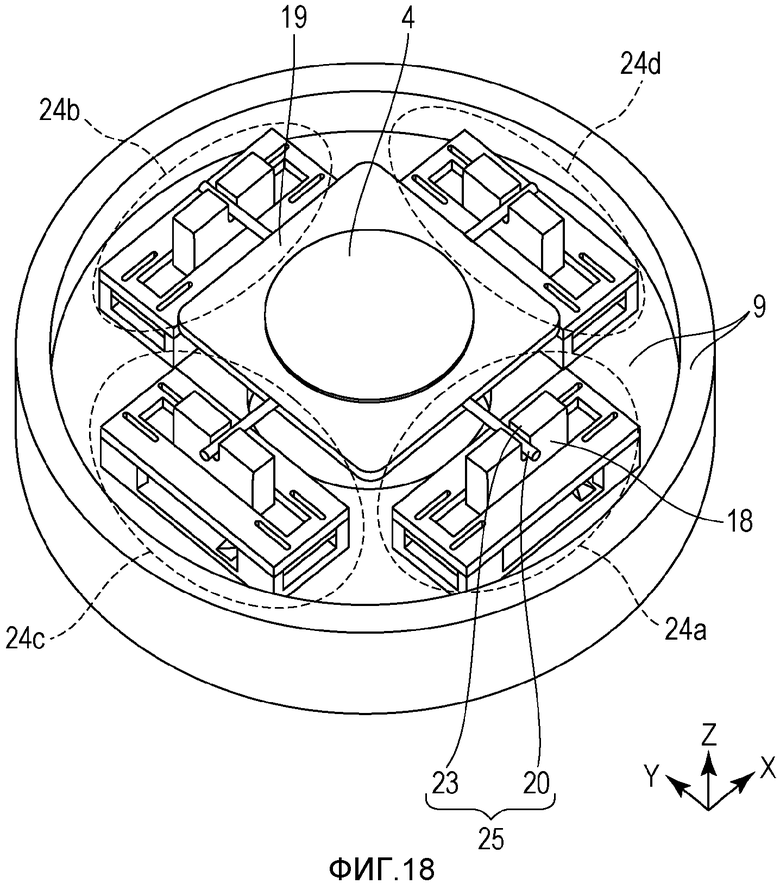
Фиг. 18 - вид в перспективе устройства коррекции размытости изображения.
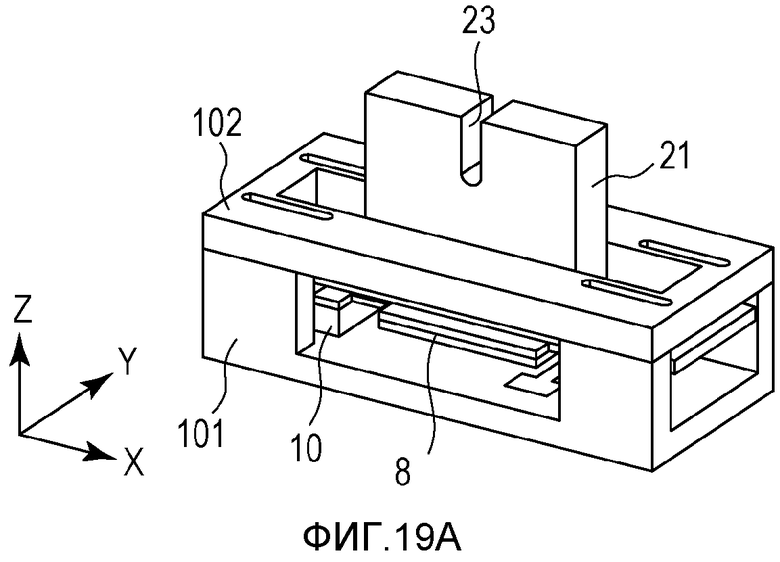
Фиг. 19А - вид в перспективе устройства привода вибрационного типа.
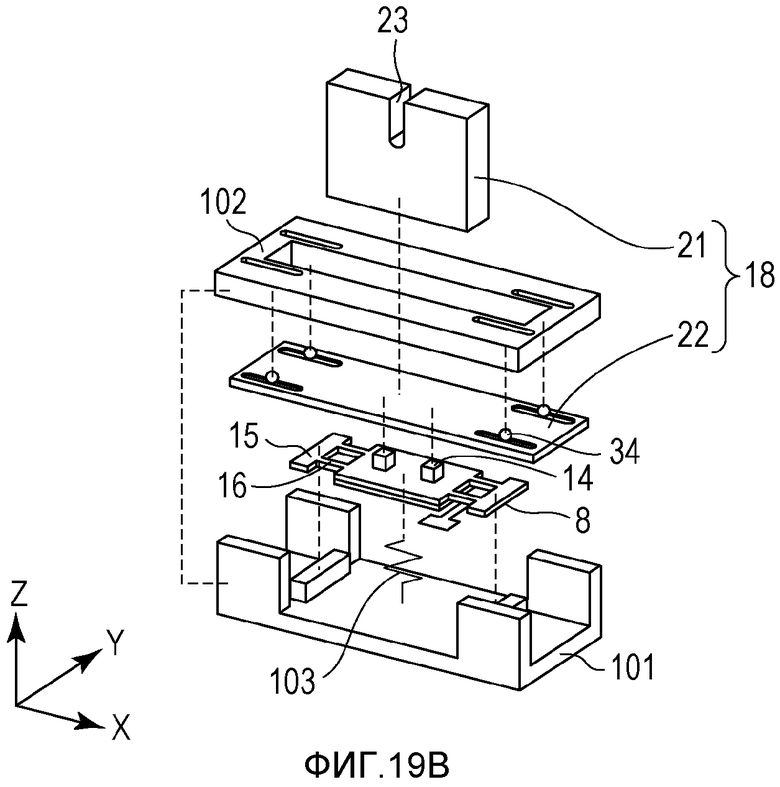
Фиг. 19В - развернутый вид устройства привода вибрационного типа.
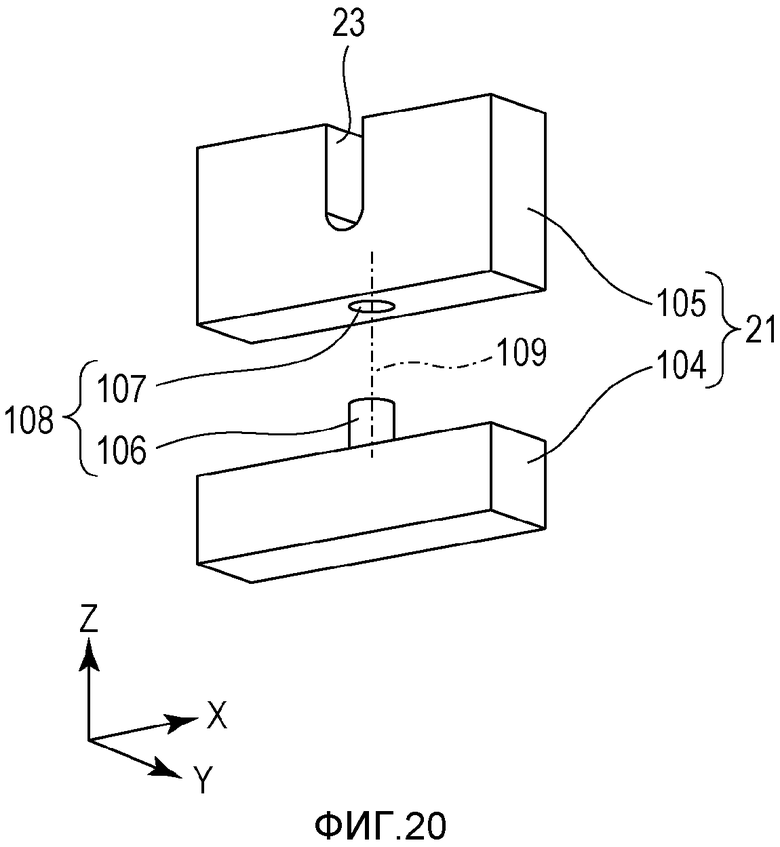
Фиг. 20 - вид в перспективе основного тела приводного тела.
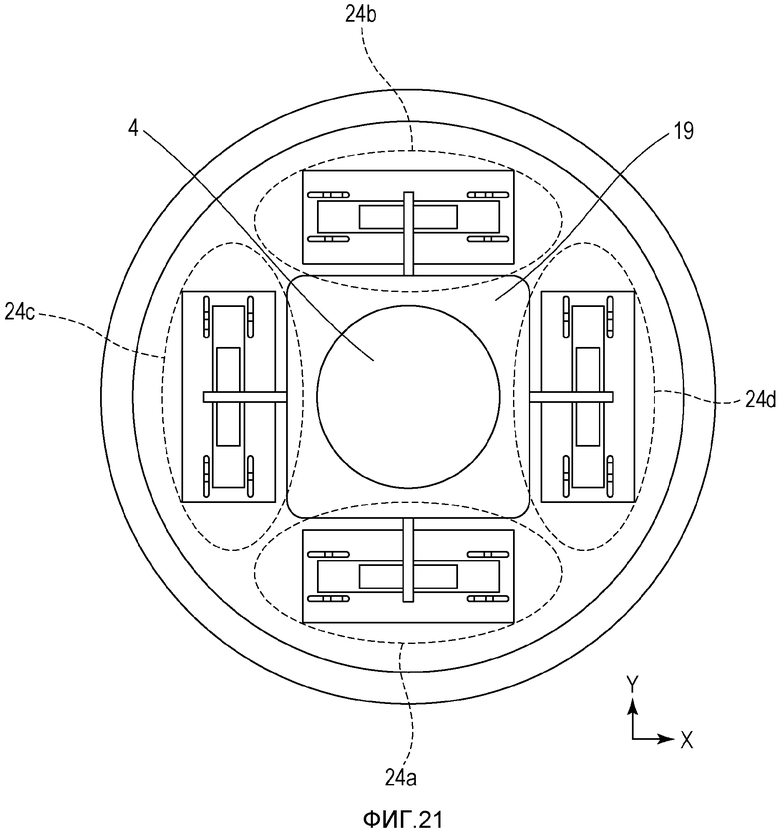
Фиг. 21 - вид спереди устройства коррекции размытости изображения.
Фиг. 22 - вид спереди устройства коррекции размытости изображения.
Фиг. 23A - вид в перспективе механизма вращения.
Фиг. 23B - вид спереди механизма вращения.
Фиг. 23C - вид сверху механизма вращения.
Фиг. 23D - вид сверху механизма вращения.
Фиг. 24А - вид в перспективе другого механизма вращения.
Фиг. 24B - вид сверху механизма вращения.
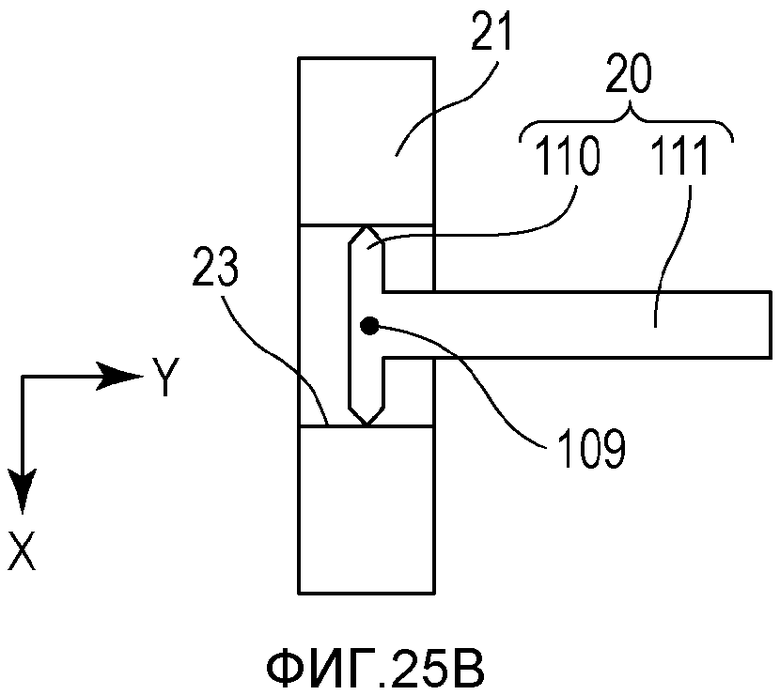
Фиг. 25A - вид в перспективе другого механизма вращения.
Фиг. 25В - вид сверху механизма вращения.
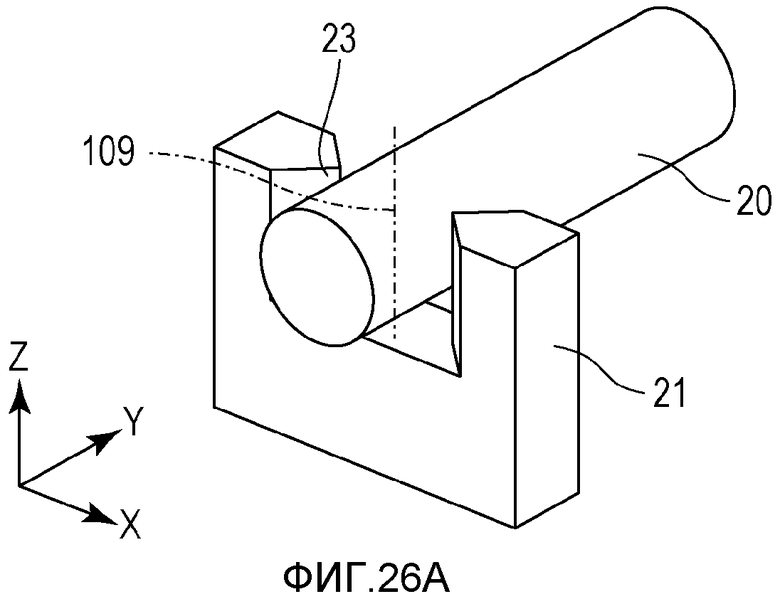
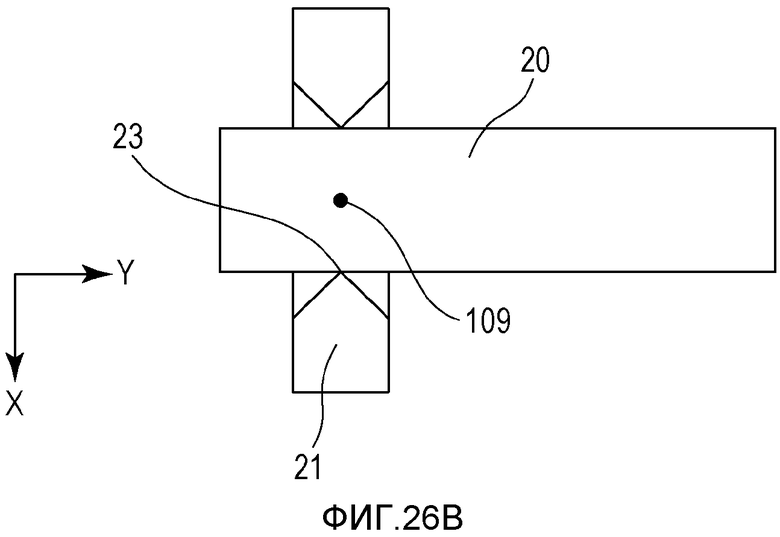
Фиг. 26А - вид в перспективе другого механизма вращения.
Фиг. 26В - вид сверху механизма вращения.
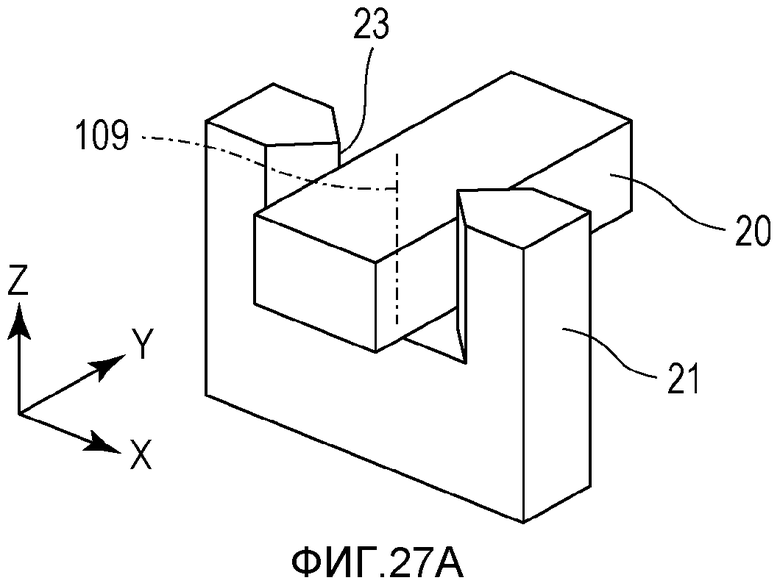
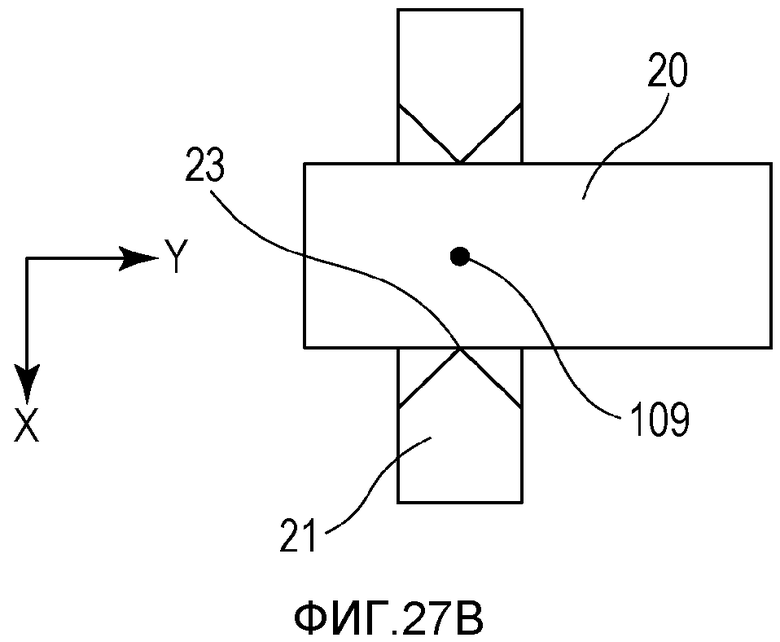
Фиг. 27А - вид в перспективе другого механизма вращения.
Фиг. 27В - вид сверху механизма вращения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения будут описаны ниже.
В настоящем изобретении фраза "плоскость, где вибратор и приводное тело находятся в контакте друг с другом" означает виртуальную плоскость, включающую в себя множество контактных точек, в которых вибратор и приводное тело находятся в контакте друг с другом. Фраза "плоскость, параллельная плоскости, где вибратор и приводное тело находятся в контакте друг с другом" означает виртуальную плоскость, которая по существу параллельна виртуальной "плоскости, где вибратор и приводное тело находятся в контакте друг с другом". Существует бесконечное число плоскостей. Существуют плоскости для определения направления перемещения механизма перемещения согласно настоящему изобретению, которые включают в себя не только плоскость, которая точно параллельна плоскости, где вибратор и приводное тело находятся в контакте друг с другом, но также и по существу параллельную плоскость, и которые предназначены только для определения первого направления и второго направления. В настоящем изобретении первое направление представляет собой направление, в котором вибратор приводит в движение приводное тело и которое также называется как "направление движения". Второе направление настоящего изобретения представляет собой направление, в котором подвижное тело может перемещаться относительно приводного тела с помощью механизма перемещения согласно настоящему изобретению и которое также называется как "направление отклонения". Термин "отклонение" означает то, что когда сила в направлении пересечения направления движения приводного тела действует на подвижном тело, подвижное тело перемещается без сопротивления этой силе. Механизм перемещения по настоящему изобретению характеризуется тем, что он может перемещать подвижное тело во втором направлении, которое определяется с помощью вышеописанной конфигурации, относительно приводного тела.
В настоящем изобретении конфигурацию, которая позволяет подвижному телу перемещаться избирательно во втором направлении относительно приводного тела (приводное тело по существу не перемещается в первом направлении, когда вибратор прекращает свою работу), можно получить путем выполнения направляющего элемента, который может перемещаться только во втором направлении. Кроме того, этой конфигурации можно также достичь путем поддержки приводного тела относительно подвижного тела с помощью упругого элемента (типично, пружинного элемента) и выполнения упругого элемента легко смещаемым только в определенном направлении.
В настоящем изобретении состояние, в котором присутствует "сила во втором направлении, пересекающем первое направление" означает состояние, в котором присутствует сила составляющей в первом в направлении, отличающемся от направления движения или первого направления (в котором вырабатывается сила перемещения в направлении, отличающемся от первого направления). Состояние, в котором действует сила перемещения в направлении, отличающемся от направления движения, приводит к потерям на выходе, как описано выше. Хотя потери на выходе являются наиболее высокими, когда угол, при котором первое направление и второе направление пересекаются, составляет типично 90 градусов, потери на выходе, соответствующие углу пересечения, могут появляться при весьма небольшом пересечении.
В состав вибратора согласно настоящему изобретению входит вибрационная пластина (которая также называется как "вибрирующее тело") и устройство электромеханического преобразования энергии (типично, пьезоэлектрического элемента, такого как пьезоэлектрическая керамика), и вибратор может возбуждать необходимые колебания путем прикладывания специфического электрического поля к устройству электромеханического преобразования энергии.
В настоящем изобретении устройство привода вибрационного типа с прямолинейным перемещением означает устройство привода вибрационного типа с возможностью линейного движения и также называется как линейное устройство привода вибрационного типа. Линейное устройство привода вибрационного типа, если оно одно, линейно перемещает подвижное тело через приводное тело; однако при объединении множества устройств привода вибрационного типа с прямолинейным перемещением подвижное тело может осуществлять многомерное перемещение в требуемом направлении.
Хотя настоящее изобретение будет подробно описано ниже со ссылкой на варианты осуществления, настоящее изобретение вовсе не ограничено приводимыми описаниями.
Первый вариант осуществления
На фиг. 1 показана схема фотоаппарата, который служит в качестве устройства захвата изображения согласно первому варианту осуществления согласно настоящему изобретению. Фотоаппарат, показанный на фиг. 1, имеет функцию захвата движущегося изображения и неподвижного изображения. Ссылочная позиция 1 обозначает оправу объектива, оснащенную устройством коррекции размытости изображения, ссылочная позиция 2 обозначает тело фотоаппарата, включающее в себя элемент 36 захвата изображения (элемент фотоэлектрического преобразования или подобный).
На фиг. 2 показана схема внутренней части оправы 1 объектива и тело 2 фотоаппарата. Ссылочная позиция 3 обозначает устройство коррекции размытости изображения. Ссылочная позиция 4 обозначает оптический объектив. Ссылочная позиция 5 обозначает устройство привода вибрационного типа; 19 обозначает подвижное тело, на котором в данном случае установлен оптический объектив 4; и 18 обозначает приводное тело, которое приводится в движение с помощью вибратора 8. Приводное тело 18 имеет конфигурацию для передачи перемещения и усилия подвижного тела 19. В этой конфигурации, оптический объектив 4 может перемещаться с помощью вибратора 8. Часть оправы 1 объектива, показанной на фиг. 2, может быть сменной, как и сменный объектив, и сменный объектив, подходящий для цели получения изображения, можно установить на теле фотоаппарата.
Кроме того, оправа 1 объектива включает в себя оптическую систему 37, которая отличается от оптического объектива 4. Хотя на фиг. 2 это не показано, фотоаппарат дополнительно включает в себя датчик ускорения, который обнаруживает дрожание оправы 1 объектива, и кодер, который обнаруживает двухмерное перемещение подвижного тела 19. Фотоаппарат дополнительно включает в себя источник 38 питания, который обеспечивает подачу электрической энергии в устройство 5 привода вибрационного типа, и блок управления, в котором используется способ управления для обработки сигнала на выходе датчика ускорения и сигнала на выходе кодера и управления источником 38 питания.
Свет от объекта проходит через оптическую систему 37, включающую в себя оптический объектив 4 в оправе 1 объектива и попадает на элемент 36 захвата изображения в теле 2 фотоаппарата. За счет перемещения оптического объектива 4 с помощью устройства 3 коррекции размытости изображения на основе сигнала от датчика ускорения можно корректировать размытость изображения из-за дрожания фотоаппарата или подобного. Хотя здесь показан пример, в котором оптический объектив 4 установлен на подвижное тело 19, настоящее изобретение не ограничивается этим, при этом настоящее изобретение включает в себя, например, случай, когда элемент 36 захвата изображения установлен на подвижном теле 19, и размытость изображения корректируется путем перемещения элемента 36 захвата изображения с помощью устройства 3 коррекции размытости изображения. Кроме того, хотя здесь показан пример, в котором устройство 3 коррекции размытости изображения выполнено с оправой 1 объектива, настоящее изобретение не ограничивается этим. Настоящее изобретение включает в себя, например, случай, когда оправа 1 объектива не отделяется от тела 2 фотоаппарата, и объективы и устройство 3 коррекции размытости изображения выполнены в теле 2 фотоаппарата.
На фиг. 3 показан вид в перспективе устройства 3 коррекции размытости изображения. Ссылочная позиция 9 обозначает, например, часть оправы 1 объектива. Оправа 1 объектива имеет четыре устройства 24 привода вибрационного типа (24а, 24b, 24c и 24d). Устройства 24а-24d привода вибрационного типа совместно используют подвижное тело 19. Подвижное тело 19 удерживает оптический объектив 4. Устройства 24 привода вибрационного типа представляют собой исполнительные механизмы с возможностью линейного перемещения. Направлением движения устройств 24a и 24b привода вибрационного типа является направление X, показанное на фиг. 3. С другой стороны, направлением движения устройств 24с и 24d привода вибрационного типа является направление Y, показанное на фиг. 3. В результате объединения приводов четырех устройств 24 привода вибрационного типа выполнено устройство двухмерного привода с возможностью приведения в движение подвижного тела 19 в двух измерениях (в направлении X, в направлении Y и вокруг оси Z). В дополнение к этому, оптический объектив 4, датчик ускорения, кодер и блок управления для коррекции размытости изображения выполнены для конфигурирования устройства коррекции размытости изображения.
Оправа 9 объектива имеет четыре участка 10 для установки вибратора, на которые устанавливаются вибраторы 8. Каждый из вибраторов 8 находится в прижимном контакте с приводным телом 18. Приводное тело 18 имеет участки 23 для передачи. Подвижное тело 19 удерживает оптический объектив 4. Подвижное тело 19 присоединяется к восьми направляющим элементам 20. С помощью вибратора 8, приводящего в движение подвижное тело 18 и передающего движущую силу подвижному телу 19 через участки 23 для прохождения приводного тела и направляющие элементы 20, оптический объектив 4 перемещается на подвижном теле 19. В первом варианте осуществления участки 23 для прохождения приводного тела и направляющие элементы 20 образуют механизм 25 перемещения.
В состав каждого устройства 24 привода вибрационного типа согласно варианту осуществления настоящего изобретения входит вибратор 8, приводное тело 18, механизмом 25 перемещения и подвижное тело 19. Механизм 25 перемещения устройства 24 привода вибрационного типа, который является признаком настоящего изобретения, состоит из участков 23 для прохождения приводного тела и направляющих элементов 20. Их описание будет приведено позже.
Далее следует описание конфигурации вибратора 8. На фиг. 4А и 4В показаны виды в перспективе вибратора 8. Вибратор 8 состоит из пьезокерамики 11, которая представляет собой устройство электромеханического преобразования энергии типа прямоугольной пластины, металлической вибрационной пластины 12, обладающей магнитными свойствами, и гибкой печатной платы 13, которая представляет собой токопроводящий элемент для подачи электрической энергии на пьезокерамику 11. Вибрационная пластина 12 имеет два выступающих участка 14, два участка 15 для крепления вибратора, четыре опорных балки 16 вибратора и базовый участок 17 вибратора, которые выполнены в виде единого блока. Базовый участок 17 вибратора вибрационной пластины 12 крепится к пьезокерамике 11 с помощью клея. Гибкая печатная плата 13 крепится к пьезокерамике 11 с помощью клея. Пьезокерамика 11 включает в себя внутренние электроды, расположенные слоями в направлении толщины, и внешний электрод для электрического соединения внутренних электродов и проводов гибкой печатной платы 13. Гибкая печатная плата 13 электрически соединена с источником 38 питания.
Далее будет описана работа вибратора 8.
Переменное напряжение прикладывается к пьезокерамике 11 для возбуждения в вибраторе 8 колебаний в двух режимах вибрации. На фиг. 5A и 5B показаны два режима вибрации. Режим вибрации, показанный на фиг. 5A, также упоминается как режим A. Режим вибрации, показанный на 5B, также упоминается как режим B. Режим вибрации, показанный на фиг. 5A, представляет собой режим вибрации (режим А), в котором верхние поверхности выступающих участков 14 вибрируют в продольном направлении вибратора 8 (которое также упоминается как направление подачи: направление X на фиг. 5А). Режим вибрации, показанный на фиг. 5B, представляет собой режим вибрации (режим В), в котором верхние поверхности выступающих участков 14 вибрируют в направлении, в котором выступающие участки 14 входят в контакт с приводным телом 18 (которое также упоминается как направление толкания вверх: направление Z на фиг. 5А). Переменное напряжение устанавливается таким образом, чтобы возбуждать колебания в двух режимах вибрации под углом приблизительно 90 градусов во временной фазе. В данном случае фраза "приблизительно 90 градусов" означает, что углы, которые отличаются от углов, равных точно 90 градусам, допустимы в диапазоне, в котором вырабатываются необходимые колебания. В настоящем изобретении то же самое применимо к выражению "приблизительно". Таким образом, верхние поверхности выступающих участков 14 перемещаются по эллиптической траектории в плоскости, параллельной плоскости X-Y на чертежах. Устанавливая разность фаз между колебаниями в двух режимах вибрации приблизительно на -90 градусов, можно менять направление перемещения по эллиптической траектории.
Хотя выше был описан случай, когда колебания в двух режимах вибрации возбуждались в вибраторе 8 для перемещения верхних поверхностей выступающих участков 14 по эллиптической траектории, режим вибрации и форма вибратора 8 не ограничивается этим. Например, может быть использован вибратор, включающий в себя один выступающий участок и имеющий режим вибрации в направлении Z, показанном на чертеже. В этом случае, изменяя наклон выступающего участка относительно вертикальной линии, находящейся в контакте с контактной поверхностью приводного тела 18 с вибратором, можно приводить в движение приводное тело 18.
Далее будут описаны конфигурация и операция привода устройства 24 привода вибрационного типа. На фиг. 6 показан вид в перспективе устройства 24 привода вибрационного типа. Привод тела 18 состоит из основного тела 21 приводного тела и износостойкого материала 22, образованного из очень износостойкого материала. Основное тело 21 приводного тела и износостойкий элемент 22 прикреплены винтами (не показаны). Приводное тело 18 и вибратор 8 расположены таким образом, что износостойкий элемент 22 находится в контакте с верхними поверхностями выступающих участков 14 вибратора 8. Основное тело 21 приводного тела выполнено из неодимового магнита, который создает силу притяжения между ним и вибрационной пластиной 12, обладающей магнитными свойствами. Это приводит к тому, что выступающие участки 14 и износостойкий элемент 22 входят в прижимной контакт друг с другом. Как описано выше, когда в вибраторе 8 возбуждаются колебания в двух режимах вибрации, на верхних поверхностях выступающих участков 14 может возникать движение по эллиптической траектории. Это позволяет приводить в движение приводное тело 18, которое находится в прижимном контакте с верхними поверхностями выступающих участков 14, в направлении X, показанном на фиг. 6. Хотя здесь показан пример, в котором вибрационная пластина 12 выполнена из материала, обладающего магнитными свойствами, и сила притяжения между вибрационной пластиной 12 и основным телом 21 приводного тела, выполненного из неодимового магнита, заставляет выступающие участки 14 и износостойкий элемент 22 входить в прижимной контакт друг с другом, устройство привода вибрационного типа согласно настоящему изобретению не ограничивается этим. Например, вибрационная пластина 12 и основное тело 21 приводного тела можно выполнить из немагнитных материалов. В этом случае обеспечение прижимного элемента, такого как спиральная пружина, позволяет приводить выступающие участки 14 и износостойкий элемент 22 в прижимной контакт друг с другом.
Далее описана конфигурация механизма 25 перемещения, которая является признаком настоящего изобретения. Направление движения (первое направление), в котором вибратор 8 приводит в движение приводное тело 18, представляет собой направлении X (первое направление), показанное на фиг. 6. Направление Y (второе направление, или направление отклонения) пересекает направление X (первое направление).
Основное тело 21 приводного тела 18 имеет отверстия круглого сечения, ось которых продолжается в направлении Y (во втором направлении) в виде участков 23 для прохождения приводного тела. На внутренние периферийные поверхности отверстий наносится твердое гальваническое покрытие для повышения стойкости к истиранию. Направляющие элементы 20, выполненные из износостойкого материала, размещаются с возможностью прохождения через отверстия (участки 23 для прохождения приводного тела). Направляющие элементы 20 присоединены к подвижному телу 19 и имеют форму круглого стержня, чье продольное направление (осевое направление) продолжается в направлении Y (во втором направлении). Внутренние окружные поверхности круглых отверстий участков 23 для прохождения приводного тела и внешние окружные поверхности направляющих элементов 20 в форме круглого стержня представляют собой поверхности, которые могут перемещаться относительно друг друга в направлении Y (во втором направлении или в направлении отклонения), показанном на фиг. 6. Эти поверхности покрыты смазкой для уменьшения нагрузки во время скольжения. Приведенная выше конфигурация направляющих элементов 20 и участков 23 для прохождения приводного тела, которые служат в качестве механизма 25 перемещения, позволяет перемещать приводное тело 18 и подвижное тело 19 относительно друг друга в направлении Y (во втором направлении или в направлении отклонения) при маленькой нагрузке. Кроме того, механизм 25 перемещения может передавать движение и усилие в направлении движения (в первом направлении) подвижному телу 19.
Далее описана работа устройства 24 привода вибрационного типа в устройстве двухмерного привода. На фиг. 7 показан вид спереди устройства 3 коррекции размытости изображения. Начало системы координат на фиг. 7 расположено в центре внешней окружности оправы 1 объектива. Направление движения (первое направление) устройств 24а и 24b привода вибрационного типа совпадает с направлением X, показанным на фиг. 7, и направление отклонения (второе направление) посредством механизмов 25 перемещения совпадают с направлением Y. Направление движения (первое направление) устройств 24с и 24d привода вибрационного типа совпадает с направлением Y, и направление отклонения (второе направление) посредством механизмов 25 перемещения совпадает с направлением X.
Устройства 24а и 24b привода вибрационного типа позволяют перемещать подвижное тело 19, которое удерживает оптический объектив 4, в положительном направлении оси Х, как показано на фиг. 8.
Поскольку направление движения (первое направление) устройств 24с и 24d привода вибрационного типа совпадает с направлением Y, устройства 24с и 24d привода вибрационного типа не вносят вклад в перемещение подвижного тела 19. В то же самое время, подвижное тело 19 может перемещаться относительно устройств 24а и 24b привода вибрационного типа в направлении X (во втором направлении) с помощью механизмов 25 перемещения, и, таким образом, не создается нагрузка, которая затрудняет перемещение подвижного тела 19 в направлении X. Кроме того, вибратор 8 и приводное тело 18 также не перемещаются.
Возбуждение устройств 24с и 24d привода вибрационного типа позволяет перемещать подвижное тело 19 в положительном направлении Y, как показано на фиг. 9. Соответственно, устройства 24а и 24b привода вибрационного типа не создают нагрузку, которая затрудняет перемещение подвижного тела 19 в направлении Y посредством механизмов 25 перемещения на основании вышеописанного принципа. Кроме того, вибратор 8 и приводное тело 18 также не перемещаются.
Фиг. 10 является схемой, показывающей состояние, в котором все устройства 24 привода вибрационного типа (24а, 24b, 24c и 24d) приводятся в действие для перемещения подвижного тела 19 между направлениями Х и Y. В этом случае механизмы 25 перемещения всех устройствах привода вибрационного типа (24а, 24b, 24с и 24d) перемещаются относительно друг друга, и устройства 24 привода вибрационного типа не затрудняют перемещение подвижного тела 19 как в направлении Х, так и в направлении Y.
Кроме того, конфигурация, в которой участки 23 для прохождения приводного тела обладают гибкостью при повороте вокруг оси Z, позволяет перемещать подвижное тело 19 вокруг оси Z, перпендикулярной оси Х и оси Y. Например, это можно достичь с помощью возбуждения устройства 24a привода вибрационного типа в положительном направлении Х, возбуждения устройства 24b привода вибрационного типа в отрицательном направлении Х, возбуждения устройства 24с привода вибрационного типа в отрицательном направлении Y и возбуждения устройства 24d привода вибрационного типа в положительном направлении Y.
За счет регулировки величины возбуждения устройств 24 привода вибрационного типа (24a, 24b, 24c и 24d) подвижное тело 19 можно перемещать в любых положениях в плоскости X-Y. К этому можно добавить вращательное движение в плоскости чертежа.
Преимущества настоящего изобретения будут описаны при сравнении уровня техники настоящего изобретения. В предшествующем уровне техники вибратор должен был перемещаться тогда, когда подвижное тело перемещается в направлении, пересекающем направление движения вибратора. Таким образом, устройство привода вибрационного типа требует дополнительной ускоряющей силы или замедляющей силы из-за массы вибратора во время ускорения и замедления. Кроме того, поскольку элемент источника питания для подачи питания на вибратор перемещается вместе с вибратором, например, гибкая печатная плата, которая служит в качестве элемента источника питания, значительно деформируется, что приводит к вероятному повреждению проводов. Кроме того, необходимо предусмотреть пространство, в котором могли бы перемещаться вибратор и элемент источника питания, что увеличивает размеры устройства.
С другой стороны, в варианте осуществления согласно настоящему изобретению вибратор 8 и приводное тело 18 находятся по-прежнему в направлении отклонения (во втором направлении) по сравнению с уровнем техники. Таким образом, настоящее изобретение имеет следующие преимущества по сравнению с уровнем техники.
В частности, между приводным телом и подвижным телом предусмотрен механизм перемещения, который может перемещать подвижное тело в направлении (во втором направлении), пересекающем направление движения (первое направление) вибратора. Это позволяет уменьшить потери на выходе устройства привода вибрационного типа, устройства двухмерного привода, устройства коррекции размытости изображения, сменного объектива, устройства захвата изображения или автоматического предметного столика без выполнения вибратором и приводным телом операции отклонения. Таким образом, это позволяет уменьшить потери на выходе для ускорения или замедления вибратора, предотвращая тем самым повреждение проводов элемента источника питания или увеличение размеров устройства из-за пространства, в котором должны перемещаться вибратор и элемент источника питания.
Далее описан механизм ограничения со ссылкой на фиг. 6. Ссылочная позиция 26 обозначает механизм ограничения. Для каждого устройства 24 привода вибрационного типа предусмотрено два механизма 26 ограничения. Каждый из механизмов 26 ограничения состоит из вала 28, закрепленного в оправе 1 объектива, и ролика 27 с возможностью вращения вокруг вала 28. Ролики 27 размещаются таким образом, что их внешние окружные поверхности находятся в контакте со сторонами приводного тела 18 с обеих сторон приводного тела 18 в направлении Y (во втором направлении). Другими словами, два механизма 26 ограничения размещаются таким образом, чтобы располагаться по бокам приводного тела 18 во втором направлении. Это ограничивает величину относительного перемещения вибратора 8 и приводного тела 18 в направлении Y (во втором направлении). С другой стороны, относительное перемещение вибратора 8 и приводного тела 18 в направлении X (в первом направлении) не ограничено.
Далее описано преимущество механизма 26 ограничения. Когда направление движения (первое направление) вибратора 8 отклоняется от направления X из-за ошибки в положении установки или тому подобного, приводное тело 18 воспринимает также усилие в направлении Y (во втором направлении) за счет приведения в движение вибратора 8. Это заставляет приводное тело 18 перемещаться в направлении Y (во втором направлении), которое затрудняет вхождение в контакт вибратора 8 и приводного тела 18 в заданном диапазоне, приводя тем самым к нестабильному контакту. Слишком большое отклонение будет затруднять контакт между вибратором 8 и приводным телом 18. Однако, поскольку первый вариант осуществления выполнен с механизмами 26 ограничения, которые описаны выше, вибратор 8 и приводное тело 18 могут постоянно находиться в контакте друг с другом в заданном диапазоне. В результате внешнего воздействия или тому подобного может произойти не отклонение в направлении движения, а отклонение вибратора 8 и приводного тела 18 в направлении Y (во втором направлении). Кроме того, в этом случае вибратор 8 и приводное тело 18 могут поддерживать контакт в заданном диапазоне с помощью механизмов 26 ограничения.
Далее будет описано дополнение к первому варианту осуществления. В первом варианте осуществления, хотя четыре устройства 24 привода вибрационного типа расположены таким образом, чтобы пересекались направления движения (первое направление), настоящее изобретение не ограничивается этим; при этом возможно двухмерное перемещение подвижного тела 19 как в первом варианте осуществления при условии, что устройства 24 привода вибрационного типа расположены таким образом, чтобы пересекались их направления движения. Преимущества механизмов 25 перемещения и механизмов 26 ограничения в этом случае являются одинаковыми.
Кроме того, хотя этот вариант осуществления обеспечивает двухмерное перемещение подвижного тела 19 с использованием только устройств 24 привода вибрационного типа, часть их можно заменить на блок привода, такой как короткоходовой линейный двигатель, в котором не используется контакт. Двухмерное перемещение подвижного тела 19 происходит даже в том случае, если, например, короткоходовой линейный двигатель и устройства 24 привода вибрационного типа располагаются так, что их направления движения отличаются.
Второй вариант осуществления
На фиг. 11 показан вид в перспективе микроскопа, который служит в качестве устройства захвата изображения, согласно второму варианту осуществления настоящего изобретения. Микроскоп, показанный на фиг. 11, включает в себя участок 30 захвата изображения, на котором размещается элемент захвата изображения, оптическая система, автоматический предметный столик 31, имеющий устройство 32 двухмерного привода. Объект наблюдения размещается на устройстве 32 двухмерного привода, и с помощью участка 30 захвата изображения получается увеличенное изображение. В тех случаях, когда диапазон наблюдения является широким, объект наблюдения перемещается в направлении X и в направлении Y (фиг. 11) с помощью устройства 32 двухмерного привода для получения большого числа изображений. Полученные изображения можно объединить с помощью компьютера (не показан) для получения изображения с высоким разрешением в широком диапазоне наблюдения.
Далее описано устройство 32 двухмерного привода. На фиг. 12 показан вид в перспективе устройства 32 двухмерного привода. Отличие по функциональным признакам между устройством 32 двухмерного привода второго варианта осуществления и устройством двухмерного привода первого варианта осуществления состоит в том, что компонент, установленный на подвижном теле 19, изменяется от оптического объектива 4 до участка 33 установки объекта наблюдения. Объект наблюдения размещается на участке 33 установки объекта наблюдения, и получается изображение, хотя объект наблюдения перемещается в двух измерениях. Устройство 32 двухмерного привода может вращаться вокруг оси Z, как и в первом варианте осуществления. Эту операцию можно использовать для регулировки положения объекта наблюдения.
Хотя этот вариант осуществления был описан применительно к примеру, в котором блок двухмерного привода, оснащенный устройством привода вибрационного типа согласно настоящему изобретению, применяется в автоматическом предметном столике микроскопа, при этом изобретение не ограничивается этим, и его можно применять в предметных столиках различных устройств.
Третий вариант осуществления
Третий вариант осуществления отличается от первого варианта осуществления конфигурацией механизмов 25 перемещения. Это будет описано ниже. На фиг. 13A показан вид в перспективе механизма 25 перемещения и приводного тела 18. На фиг. 13B показан их вид спереди. Направление X на чертежах представляет собой направление движения (первое направление) устройства 24 привода вибрационного типа. Направление Y представляет собой направление отклонения (второе направление), в котором может перемещаться подвижное тело 19 и приводное тело 18 относительно друг друга посредством механизма 25 перемещения.
Направляющие элементы 20 присоединены к подвижному телу 19, имеют трапецеидальную форму в поперечном сечении в направлениях X и Y, и каждый из них имеет канавку, продолжающуюся в направлении Y (в направлении отклонения или во втором направлении). Участки 23 для прохождения приводного тела 18 имеют трапецеидальную форму в поперечном сечении в направлениях Х и Y, и каждый из них имеет канавку, продолжающуюся в направлении Y (направление отклонения или во втором направлении). Между канавками размещается керамический, с возможностью качения, сферический шарик 34, имеющий криволинейную поверхность. Направляющие элементы 20, участки 23 для прохождения приводного тела и шарики 34 образуют механизм 25 перемещения. Механизмы 25 перемещения размещаются на обоих концах приводного тела 18 в направлении X (в направлении движения, или в первом направлении). Подвижное тело 19 и приводное тело 18 подвергаются предварительной нагрузке в направлении Z, как показано на чертежах, с помощью прижимного блока (не показан). Это приводит к тому, что склоны канавок участков 23 для прохождения приводного тела и шарики 34 входят в прижимной контакт друг с другом. Аналогичным образом, склоны канавок направляющих элементов 20 и шариков 34 находятся в прижимном контакте друг с другом. Соответственно, подвижное тело 19 и приводное тело 18 могут перемещаться относительно друг друга в направлении Y (в направлении отклонения или во втором направлении) с помощью механизма 25 перемещения. Во время относительного перемещения шарики 34 катятся по поверхностям направляющих элементов 20 и участков 23 для прохождения приводного тела. Поскольку сопротивление качению является чрезвычайно маленьким, нагрузка механизма 25 перемещения во время скольжения является чрезвычайно маленькой. Кроме того, поскольку шарики 34 находятся постоянно в состоянии прижимного контакта, механизм 25 перемещения не имеет зазора. С другой стороны, для направления X (направления движения или первого направления) направляющие элементы 20 и участки 23 для прохождения приводного тела не могут перемещаться относительно друг друга и могут передавать смещение и силу в этом направлении подвижному телу 19. Механизм 25 перемещения также не имеет зазора в этом направлении.
Ниже описан способ изготовления приводного тела 18. Канавки участков 23 для прохождения приводного тела формируют в материале из тонкой листовой нержавеющей стали путем штамповки, которая представляет собой разновидность прессования, и после этого изгибают оба их конца в направлении X путем прессования. После этого поверхность подвергается азотированию для образования износостойкого материала. Так как прессование представляет собой способ изготовления с низкой стоимостью, приводное тело 18 можно изготовить по низкой цене. Аналогичным образом, направляющие элементы 20, которые будут присоединяться к подвижному телу 19, можно также изготовить по низкой цене, так как они обрабатываются путем штамповки, которая является разновидностью прессования.
На фиг. 13C показан частично увеличенный вид спереди механизма 25 перемещения в качестве примера, в котором форма участка 23 для прохождения приводного тела изменяется с канавки на плоскую поверхность. Как и в третьем варианте осуществления, описанном выше, механизм 25 перемещения выполнен с возможностью перемещения подвижного тела 19 и приводного тела 18 относительно друг друга в направлении Y (в направлении, перпендикулярном плоскости чертежа, в направлении отклонения или во втором отклонении). При перемещении шарики 34 катятся по поверхностям направляющих элементов 20 и участков 23 для прохождения приводного тела. Так как сопротивление качению является чрезвычайно маленьким, нагрузка на механизм 25 перемещения во время скольжения также является чрезвычайно маленькой. С другой стороны, для направления X (направления движения или первого направления) направляющие элементы 20 и участки 23 для прохождения приводного тела не могут перемещаться относительно друг друга, и движение и усилие в этом направлении могут передаваться подвижному телу 19. Кроме того, они могут также перемещаться относительно друг друга в направлении Z. В это время шарики 34 не катятся, и между контактными поверхностями участков 23 для прохождения приводного тела и шариков 34 возникает трение скольжения.
Другая конфигурация механизма 25 перемещения показана на фиг. 14А-14С. На фиг. 14A и 14B показан цилиндрический ролик в качестве замены для шарика 34, описанного выше. Как цилиндрическая форма, показанная на фиг. 14А, так и трехступенчатая цилиндрическая форма, показанная на фиг. 14В, имеют поверхность 35 качения (изогнутую форму), имеющую кривизну ролика. На фиг. 14C показана канавка с прямоугольной формой в поперечном сечении в качестве замены для направляющего элемента 20 и канавка участки 23 для прохождения приводного тела. Направление X (фиг. 14C) представляет собой направление движения (первым направлением) устройства 24 привода вибрационного типа, и направление Y представляет собой направление отклонения (второе направление). Между канавкой участков 23 для прохождения приводного тела и канавкой направляющего элемента 20 предусмотрена цилиндрическая поверхность. Так как поверхность 35 качения цилиндрических роликов катится между канавками, то имеет место конфигурация механизма перемещения с возможностью перемещения в направлении Y (в направлении отклонения или во втором направлении).
Четвертый вариант осуществления
Четвертый вариант осуществления отличается от первого варианта осуществления конфигурацией механизма 25 перемещения, которая будет описана ниже. На фиг. 15 показан вид в перспективе механизма 25 перемещения, части подвижного тела 19 и приводного тела 18. Направление X (фиг. 15) представляет собой направление движения (первое направление) устройства 24 привода вибрационного типа. Направление Y представляет собой направление отклонения (второе направление), в котором подвижное тело 19 и приводное тело 18 могут перемещаться относительно друг друга с помощью механизма 25 перемещения.
Механизм 25 перемещения представляет собой упругий элемент из нержавеющей стали, имеющий форму тонкой прямоугольной пластины. Направление толщины пластины представляет собой направление Y (направление отклонения или второе направление). Один конец изогнут под прямым углом путем прессования и прикреплен к приводному телу 18. Другой конец крепится к подвижному телу 19.
Поскольку направление толщины тонкой пластины механизма 25 перемещения представляет собой направление Y (направление отклонения или второе направление), жесткость при изгибе в направлении Y (в направлении отклонения или во втором направлении) является маленькой. Когда подвижное тело 19 перемещается в направлении Y с помощью другого устройства 24 привода вибрационного типа, механизм 25 перемещения деформируется в направлении Y (в направлении отклонения или во втором направлении). Это позволяет приводному телу 18 и подвижному телу 19 перемещаться относительно друг друга в направлении Y (в направлении отклонения или во втором направлении). Так как этот механизм 25 перемещения является однокомпонентным и может формироваться путем прессования, его преимущество состоит в том, что он имеет простую конфигурацию, и его можно изготавливать с низкой стоимостью.
Кроме того, размер механизма 25 перемещения в направлении X (в направлении движения или в первом направлении) больше, чем размер в направлении толщины пластины (в направлении Y, в направлении отклонения или во втором направлении). Таким образом, жесткость в направлении X (в направлении движения или в первом направлении) выше, чем жесткость в направлении Y (в направлении отклонения или во втором направлении). Так как жесткость в направлении X (в направлении движения или в первом направлении) является высокой, в этом направлении можно передавать движение или усилие. Кроме того, в этом направлении механизм 25 перемещения не имеет зазора, и, таким образом, он имеет высокую точность перемещения подвижного тела 19.
Пятый вариант осуществления
Пятый вариант осуществления отличается от четвертого варианта осуществления конфигурацией механизма 25 перемещения. На фиг. 16 показан вид в перспективе механизмов 25 перемещения, части подвижного тела 19 и приводного тела 18. Направление X на фиг. 16 представляет собой направление движения (первое направление) устройства 24 привода вибрационного типа. Направление Y представляет собой отклонение направления (второе направление), в котором подвижные тела 19 и приводное тело 18 могут перемещаться относительно друг друга с помощью механизмов 25 перемещения.
Хотя в четвертом варианте осуществления один упругий элемент функционирует как механизм 25 перемещения, пятый вариант осуществления сконфигурирован таким образом, что два (множество) упругих элемента размещены бок о бок в направлении X (в направлении движения или в первом направлении). Это позволяет увеличить жесткость механизмов 25 перемещения вокруг оси Z (фиг. 16). Когда подвижные тела 19 перемещаются в направлении Y (в направлении отклонения или во втором направлении), на участке механизмов 25 перемещения, присоединенных к приводным телам 18, действуют силы. В пятом варианте осуществления два механизма 25 перемещения соединены в направлении X таким образом, чтобы удерживать приводное тело 18 между ними. Соответственно, когда подвижные тела 19 перемещаются в направлении Y, силы, воздействующие на соединенные участки, равны между двумя механизмами 25 перемещения. Соответственно, в приводном теле 18 создается момент в направлении вокруг оси Z. Это позволяет стабилизировать относительное положение вибратора 8 и приводного тела 18 вокруг оси Z, тем самым обеспечивая преимущество для стабилизации характеристик. Это преимущество добавляется к преимуществам, описанным в четвертом варианте осуществления.
Шестой вариант осуществления
Шестой вариант осуществления отличается от пятого варианта осуществления конфигурацией механизма 25 перемещения. На фиг. 17A и 17B показаны виды в перспективе механизмов 25 перемещения, части подвижного тела 19 и приводного тела 18. Фиг. 17A и 17B отличаются направлением взгляда. Направление X на фиг. 17A и 17B представляет собой направление движения (первое направление) устройства 24 привода вибрационного типа. Направление Y представляет собой направление отклонения (второе направление), в котором подвижное тело 19 и приводное тело 18 могут перемещаться относительно друг друга с помощью механизма 25 перемещения.
Хотя в пятом варианте осуществления два упругих элемента расположены бок о бок в направлении X (в направлении движения, или в первом направлении), шестой вариант осуществления сконфигурирован таким образом, что упругие элементы расположены бок о бок в направлении Y (в направлении отклонения или во втором направлении).
В этой конфигурации механизм 25 перемещения функционирует как гибкая связь, основным направлением деформации которой является направление Y (направление отклонения или второе направление). Когда подвижное тело 19 перемещается в направлении Y (в направлении отклонения или во втором направлении), сила вокруг оси Z, которую воспринимает приводное тело 18, является чрезвычайно маленькой. Это позволяет стабилизировать относительные положения вибратора 8 и приводного тела 18 вокруг оси Z, тем самым обеспечивая преимущество для стабилизации характеристик, как и в пятом варианте осуществления.
В случае четвертого варианта осуществления, когда увеличивается относительное смещение приводного тела 18 и подвижного тела 19 в направлении Y (в направлении отклонения или во втором направлении), упругий элемент растягивается в продольном направлении. Так как оба конца упругого элемента жестко закреплены в продольном направлении и имеют высокую жесткость в продольном направлении, жесткость в направлении Y (в направлении отклонения или во втором направлении) быстро увеличивается. Это представляет собой так называемое нелинейное явление. Когда эта жесткость увеличивается, сила реакции при деформации упругого элемента увеличивается тогда, когда приводное тело 18 и подвижное тело 19 перемещаются относительно друг друга в направлении Y (в направлении отклонения или во втором направлении). Это сила реакции действует на подвижное тело 18 с увеличением нагрузки. Таким образом, это ограничивает практическое относительное смещение приводного тела 18 и подвижного тела 19 в направлении Y (в направлении отклонения или во втором направлении) до маленькой величины.
С другой стороны, в шестом варианте осуществления оба конца упругих элементов не ограничены, так что концы, присоединенные к приводному телу 18, можно разместить в направлении X. Таким образом, не происходит быстрого увеличения жесткости из-за нелинейной формы, как и в четвертом варианте осуществления. Это позволяет увеличить практическое относительное смещение приводного тела 18 и подвижного тела 19 в направлении Y (в направлении отклонения или во втором направлении).
Седьмой вариант осуществления
На фиг. 18 показан вид в перспективе устройства коррекции размытости изображения согласно седьмому варианту осуществления настоящего изобретения. Оптический объектив 4 прикреплен к подвижному телу 19. Подвижное тело 19 имеет четыре направляющих элемента 20 в форме круглых стержней. Отдельные направляющие элементы 20 продолжаются от центра подвижного тела 19 в направлении X и в направлении Y на фиг. 18. Выполнены четыре устройства 24 (24а, 24b, 24c и 24D) привода вибрационного типа, которые включают в себя подвижное тело 19 и направляющие элементы 20. Четыре устройства 24 (24а, 24b, 24c и 24D) привода вибрационного типа совместно используют подвижное тело 19. Отдельные устройства 24 (24a, 24b, 24c и 24d) привода вибрационного типа прикреплены к оправе 9 объектива.
Направление движения (первое направление) устройств 24а и 24b привода вибрационного типа представляет собой направление X, показанное на фиг. 18. Направление движения (первое направление) устройств 24с и 24d привода вибрационного типа представляет собой направление Y. Путем объединения приводов четырех устройств 24 (24a, 24b, 24c и 24d) привода вибрационного типа выполнено устройство двухмерного привода с возможностью двухмерного привода (в направлении X, в направлении Y и вокруг оси Z) подвижного тела 19. В дополнение к этому, оптический объектив 4, датчик ускорения, кодер и блок управления для коррекции размытости изображения выполнены для конфигурирования устройства коррекции размытости изображения.
Далее описана конфигурация устройства 24 привода вибрационного типа.
На фиг. 19А и 19В показаны виды в перспективе устройства 24 привода вибрационного типа. На фиг. 19В показана конфигурация компонентов в собранном виде, в которой отдельные компоненты выполнены в направлении Z. Ссылочная позиция 101 обозначает основание блока; 103 обозначает пружину; 8 обозначает вибратор; 22 обозначает износостойкий элемент; 34 обозначает керамический шарик; 21 обозначает основное тело приводного тела; и 102 обозначает верхнюю часть блока. Основание 101 блока и верхняя часть 102 блока прикреплены вместе с помощью винтов (не показаны) и фиксируют положение других компонентов в направлении Z.
Вибратор 8 является таким же, как и в первом варианте осуществления. Направление движения (первое направление) представляет собой направление X на фиг. 19А и 19В. Участки 15 крепления вибратора прикреплены к основанию 101 блока.
Поверхность износостойкого материала 22 подвергают азотированию, чтобы увеличить стойкость к истиранию. Износостойкий элемент 22 и основное тело 21 приводного тела соединяются вместе путем склеивания для образования приводного тела 18.
Пружина 103 выполнена между основанием 101 блока и вибратором 8 и имеет функцию приведения вибратора 8 в прижимной контакт с износостойким элементом 22. Сила F1 прижимного контакта верхних поверхностей выступающих участков 14 вибратора 8 и износостойкий элемент 22 можно представить в виде выражения F0 - K*дельта z, где F0 - прижимное усилие пружины 103, K - жесткость верхних поверхностей выступающих участков 14 в направлении Z (фиг. 19В) в положениях 15 крепления вибратора, и дельта z - смещение из-за деформации. Дельта z зависит от относительных положений компонентов после сборки и значительно влияет на ошибку компонента. Таким образом, изменение прижимного контактного усилия F1 уменьшается за счет установки K на маленькое значение. Для этого вибратор 8 устанавливает K на маленькое значение за счет обеспечения опорных балок 16 вибратора, которые являются маленькими по площади поперечного сечения в плоскости Y-Z и длинными в направлении X между участками 15 крепления вибратора и выступами 14. Таким образом, прижимное усилие F1 контакта по существу состоит из прижимного усилия F0 пружины 103.
Работа вибратора 8 является такой же, как и в первом варианте осуществления. Верхние поверхности выступающих участков 14 могут перемещаться по эллиптической траектории в плоскости, параллельной плоскости X-Y (фиг. 19А и 19В). Это позволяет приводить в движение в направлении X износостойкий элемент 22, который находится в прижимном контакте с верхними поверхностями выступающих участков 14 и основного тела 21 приводного тела.
Износостойкий элемент 22 имеет четыре канавки, с которыми четыре керамических шарика 34 находятся в контакте. Две канавки, расположенные ближе к наблюдателю в направлении Y, имеют V-образную форму, продолжающуюся в направлении X. Две канавки, расположенные дальше от зрителя в направлении Y, имеют вогнутую форму, продолжающуюся в направлении X. Верхняя часть 102 блока также имеет четыре канавки, с которыми четыре керамических шарика 34 находятся в контакте. Четыре канавки имеют V-образное продолжение в направлении X. Износостойкий элемент 22, керамические шарики 34 и верхняя часть 102 блока приводятся в прижимной контакт друг с другом в направлении Z с помощью пружины 103. Усилие прижимного контакта равно силе F1, которая описана выше. Эта конфигурация позволяет керамическим шарикам 34 катиться в направлении X и предотвращает перемещение керамических шариков 34 в направлениях, включающих в себя направление Y, отличное от направления X. Таким образом, приводное тело 18 образует механизм 26 ограничения, чья величина перемещения в направлении Y относительно верхней части 102 блока ограничена. Преимущество этой конфигурации является такое же, как и у механизма 26 ограничения, описанного в первом варианте осуществления.
Далее будет описана конфигурация механизма 25 перемещения, которая является признаком настоящего изобретения.
Основное тело 21 приводного тела, показанное на фиг. 19A и 19B, имеет участок 23 для прохождения приводного тела. Участок 23 для прохождения приводного тела имеет плоские поверхности, параллельные плоскости Y-Z (фиг. 19А и 19В). Направляющий элемент 20, показанный на фиг. 18, вставляется в него.
Они образуют механизм 25 перемещения, который может совершать относительное перемещение в направлении Y (в направлении отклонения или во втором направлении). Контактная поверхность механизма 25 перемещения покрыта смазкой, чтобы находиться при скольжении по существу без нагрузки. Кроме этого, благодаря этому механизму отсутствует ограничение на относительное положение в направлении Z.
Данная конфигурация имеет преимущества, описанные в первом варианте осуществления. Отдельные устройства 24 привода вибрационного типа могут передавать движение и усилие в направлении движения (в первом направлении) подвижному телу 19. Отдельные устройства 24 привода вибрационного типа могут перемещать подвижное тело 19 и приводное тело 18 относительно друг друга в направлении отклонения (во втором направлении), пересекая (в данном случае под прямыми углами) направление движения (первое направление) в плоскости, параллельной плоскости, где вибратор 8 и приводное тело 18 находятся в контакте друг с другом. Это предотвращает возникновение нагрузки, которая препятствует перемещению подвижного тела 19 в направлении отклонения (во втором направлении) каждого из устройств 24 (24а, 24b, 24c и 24d) привода вибрационного типа. Кроме того, вибратор 8 и приводное тело 18 могут по-прежнему оставаться в направлении отклонения (во втором направлении).
В дополнение к преимуществам, описанным в первом варианте осуществления, можно представить следующие преимущества. Относительные положения в направлении Z направляющего элемента 20 и участка 23 для прохождения приводного тела иногда имеют отклонения из-за ошибки, связанной с точностью детали или точностью установки. Благодаря этому механизму отсутствуют ограничения на относительные положения в направлении Z, поэтому не происходит ненужного ограничения в направлении Z.
Восьмой вариант осуществления
Восьмой вариант осуществления отличается от седьмого варианта осуществления конфигурацией основного тела 21 приводного тела. Это отличие будет описано ниже.
На фиг. 20 показан вид в перспективе основного тела 21 приводного тела. Направление X представляет собой направление движения (первое направление) устройства 24 привода вибрационного типа. Направление Y представляет собой направление отклонения (второе направление). Направление Z представляет собой направление контакта вибратора 8 и приводного тела 18. Детали разделены в направлении Z.
Нижняя часть 104 основного тела приводного тела и верхняя часть 105 основного тела приводного тела образуют основное тело 21 приводного тела.
Нижняя поверхность нижнего участка 104 основного тела приводного тела (фиг. 20) прикреплена к износостойкому материалу 22. Нижний участок 104 основного тела приводного тела имеет вал 106 в форме круглого стержня. Центральная ось 109 вала 106 расположена параллельно направлению Z. Поверхность вала 106 выполнена с твердой пленкой и покрыта смазкой. Верхний участок 105 основного тела приводного тела имеет участок 23 для прохождения приводного тела и круглое отверстие 107, которые действуют как часть механизма 25 перемещения. Направляющий элемент 20 размещается на участке 23 для прохождения приводного тела. Центральная ось круглого отверстия 107 совпадает с центральной осью 109 вала 106 нижнего участка 104 основного тела приводного тела. Поверхность круглого отверстия 107 выполнена с твердой пленкой и покрыта смазкой.
Нижний участок 104 основного тела приводного тела и верхний участок 105 основного тела приводного тела соединяются вместе путем вставки вала 106 в круглое отверстие 107. Круглое отверстие 107 и вал 106 образуют механизм 108 вращения. Его ось вращения (первая ось) представляет собой центральную ось 109, которая пересекает (приблизительно перпендикулярно к) плоскость, где вибратор 8 и приводное тело 18 находятся в контакте друг с другом.
Этот механизм 108 вращения позволяет приводному элементу 18 и подвижному телу 19 вращаться относительно друг друга вокруг первой оси.
Операция вращения устройства двухмерного привода посредством механизма 108 вращения будет описана ниже.
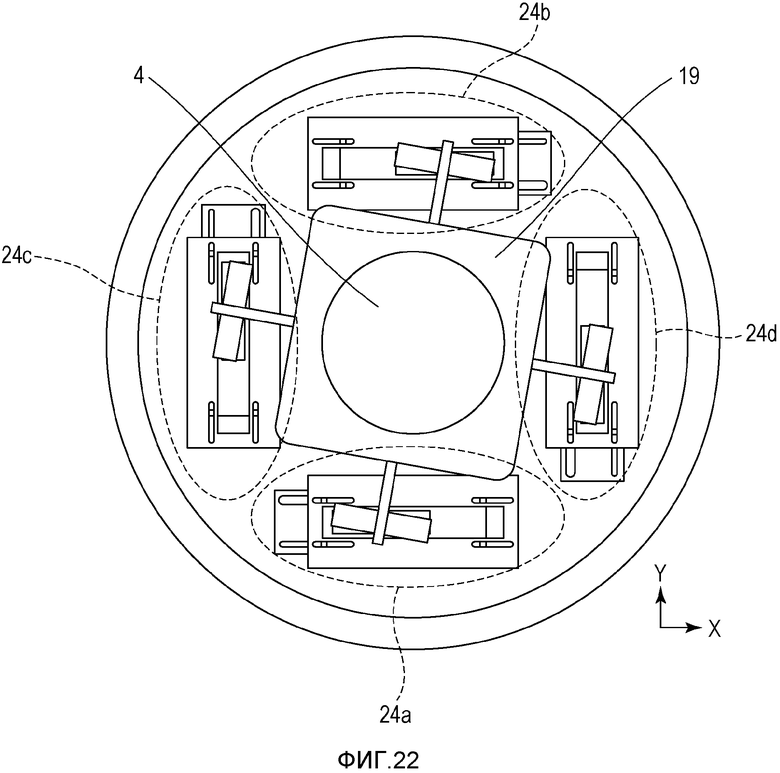
На фиг. 21 показан вид спереди устройства коррекции размытости изображения. Начало системы координат на фиг. 21 совпадает с центральным положением внешней окружности оправы 1 объектива. Устройство 24а привода вибрационного типа побуждает вырабатывать движущую силу в отрицательном направлении Х. Устройство 24b привода вибрационного типа побуждает вырабатывать движущую силу в положительном направлении Х. Устройство 24с привода вибрационного типа побуждает вырабатывать движущую силу в положительном направлении Y. Устройство 24d привода вибрационного типа побуждает вырабатывать движущую силу в отрицательном направлении Y. Другими словами, вырабатывается движущая сила в направлении по часовой стрелке в плоскости фиг. 21. Эта операция позволяет перемещать подвижное тело 19 по часовой стрелке, как показано на фиг. 22. В это время верхний участок 105 основного тела приводного тела также поворачивается по часовой стрелке с помощью механизма 108 вращения, при этом участок 23 для прохождения приводного тела может поддерживать состояние, в котором он находится вдоль направляющего элемента 20. Если механизм 108 вращения не предусмотрен, относительное вращение участка 23 для прохождения приводного тела и направляющих элементов 20 ограничивается, и, таким образом, уменьшается работа по вращению подвижного тела 19.
Девятый вариант осуществления
Девятый вариант осуществления отличается от восьмого варианта осуществления конфигурацией механизма 108 вращения.
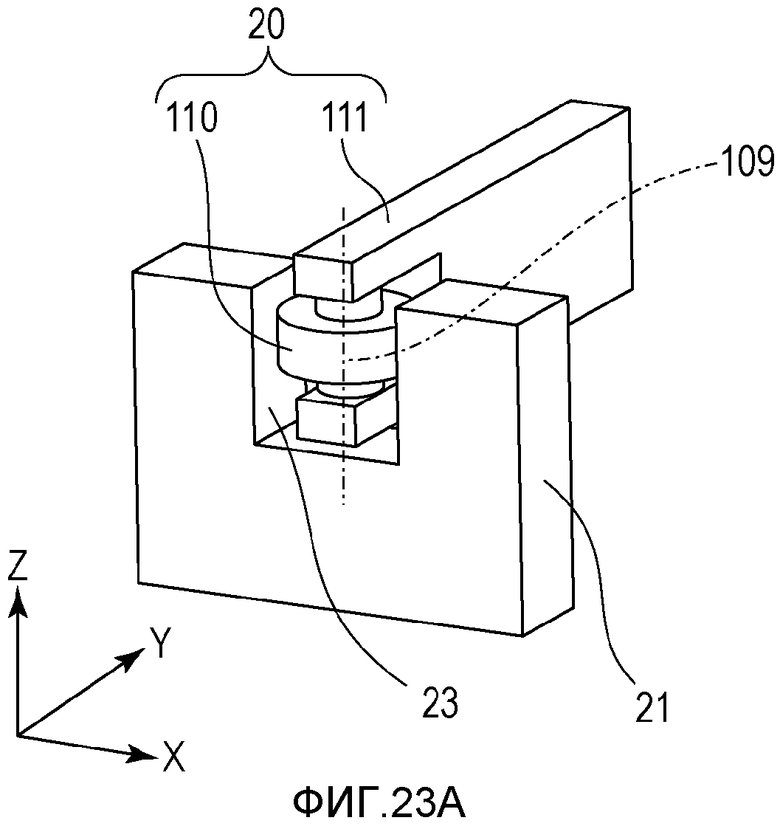
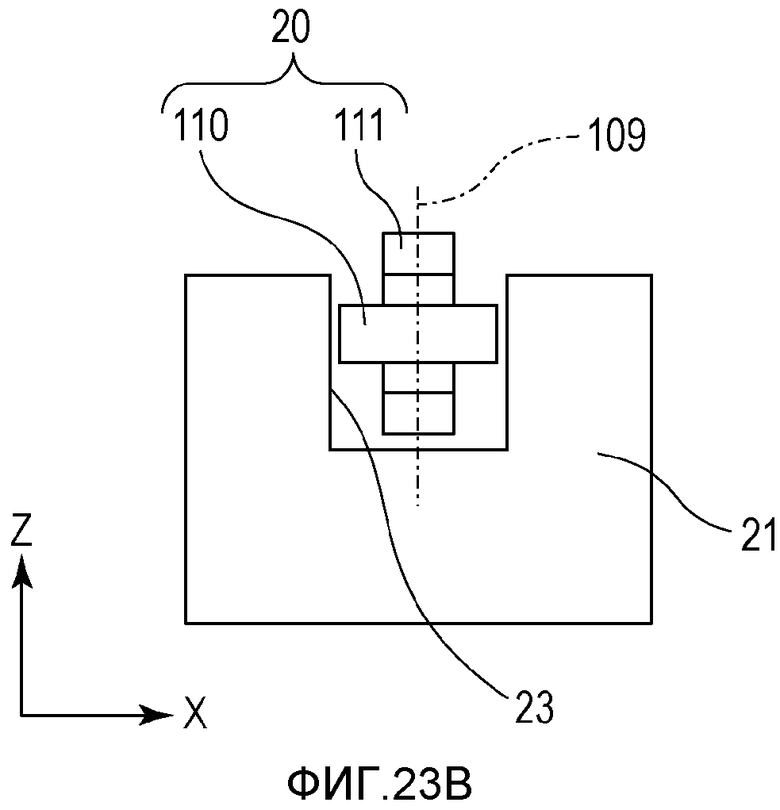
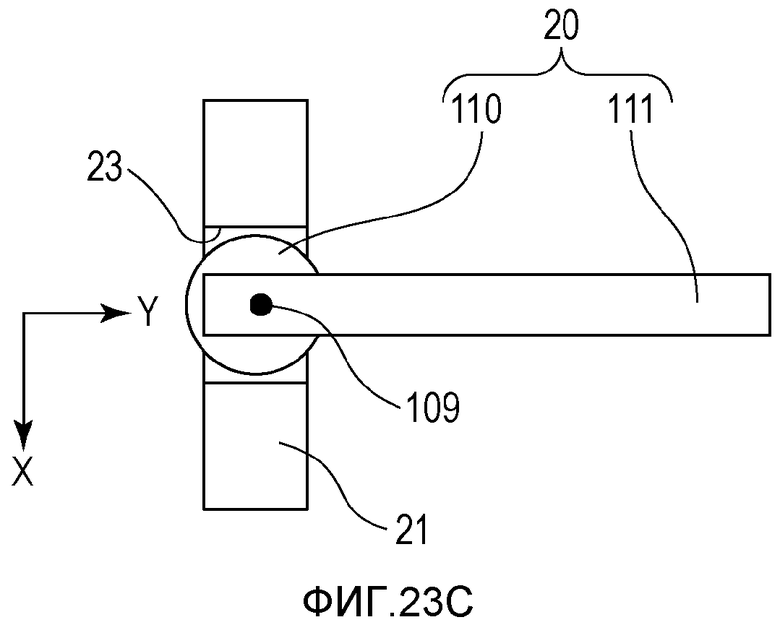
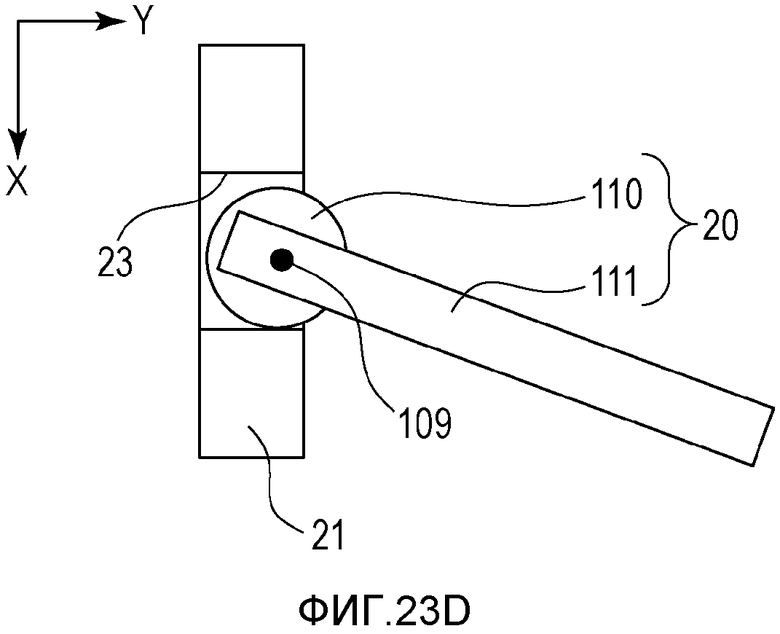
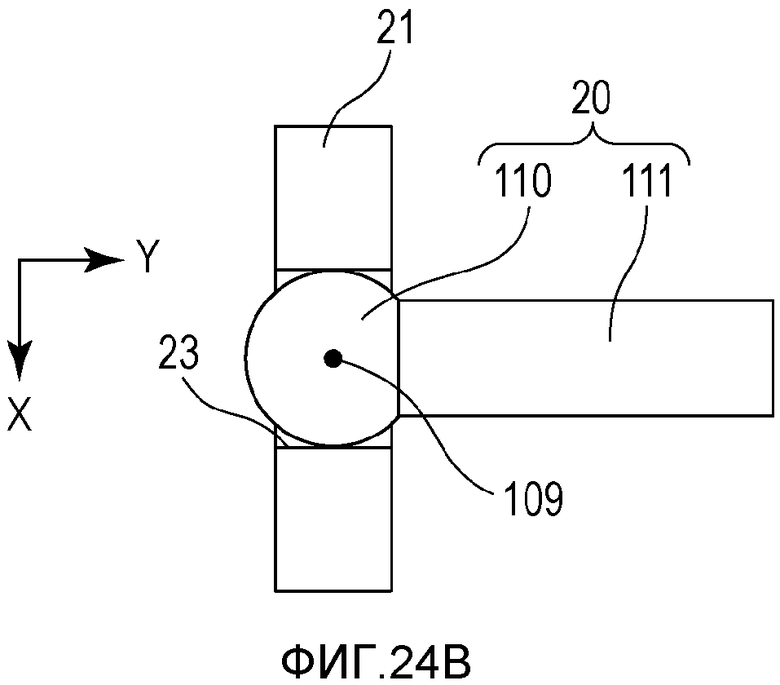
На фиг. 23A-23D показаны схемы механизма 108 вращения. На фиг. 23A показан их вид в перспективе. На фиг. 23B показан их вид спереди. На фиг. 23C и 23D показаны их виды сверху.
Основное тело 21 приводного тела имеет два плоских участка 23 для прохождения приводного тела. Направляющий элемент 20 состоит из вращающегося элемента 110, который представляет собой шариковый подшипник, и основного тела 111 направляющего элемента. В девятом варианте осуществления вращающийся элемент 110 служит в качестве механизма 108 вращения. Внутреннее кольцо вращающегося элемента 110 прикреплено к основному телу 111 направляющего элемента. Центр вращения вращающегося элемента 110 является центральной осью 109. Внешний диаметр вращающегося элемента 110 немного меньше, чем расстояние между двумя участками 23 для прохождения приводного тела, поэтому между вращающимся элементом 110 и участками 23 для прохождения приводного тела имеется зазор в направлении X. Как участки 23 для прохождения приводного тела, так и поверхность внешнего кольца вращающегося элемента 110 не покрыты смазкой.
Ниже описана операция отклонения.
Когда подвижное тело 19 перемещается в направлении Y (в направлении отклонения или во втором направлении) на фиг. 23A-23D, вращающийся элемент 110 может катиться с помощью внешнего кольца, находящегося в контакте с одним из участков 23 для прохождения приводного тела, так как внешнее кольцо имеет криволинейный участок с возможностью качения. Так как сопротивление качению намного меньше, чем сопротивление скольжению, и сопротивление качению шарикового подшипника является чрезвычайно маленьким, сопротивление в операции отклонения может быть по существу нулевым даже без смазки.
Далее будет описана работа механизма 108 вращения.
На фиг. 23D показана работа механизма 108 вращения устройства 24а привода вибрационного типа в случае, когда, как показано на фиг.22, подвижное тело 19 вращается по часовой стрелке в плоскости фиг. 22. Основное тело 21 приводного тела приводится в движение в отрицательном направлении Х. В это время плоская поверхность участков 23 для прохождения приводного тела на стороне положительного направления оси Х плоских поверхностей двух участков 23 для прохождения приводного тела входит в контакт с вращающимся элементом 110. Вращающийся элемент 110 перемещается в отрицательном направлении X, когда приводится в движение основное тело 21 приводного тела. Так как вращающийся элемент 110 может вращаться вокруг центра вращения (вокруг оси 109 вращения), основное тело 111 направляющего элемента может вращаться по часовой стрелке вокруг центра подвижного тела 19 (справа в плоскости чертежа). В это время вращающийся элемент 110 немного перемещается в положительном направлении Y относительно основного тела 21 приводного тела.
В девятом варианте осуществления за счет выравнивания центра вращения элемента, имеющего криволинейный участок с возможностью качения механизма 25 перемещения с центром вращения механизма 108 вращения, можно добиться их функционирования с помощью одного вращающегося элемента 110. Это позволяет упростить конфигурацию.
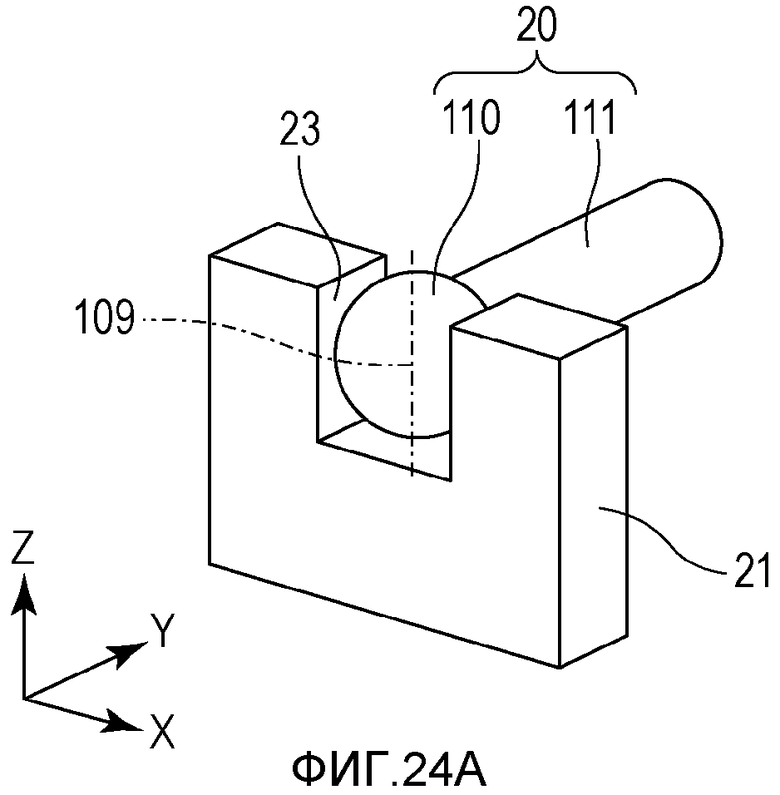
Далее описаны другие конфигурации механизма 108 вращения.
На фиг. 24A и 24B показаны схемы первой конфигурации механизма вращения. На фиг. 24A показан их вид в перспективе. На фиг. 24B показан его вид сверху. Вращающийся элемент 110 имеет сферическую форму. Центр сферы расположен на оси 109 вращения. Вращающийся элемент 110 и основное тело 111 направляющего элемента образуют направляющий элемент 20. Плоские поверхности участков 23 для прохождения приводного тела основного тела 21 приводного тела и поверхность вращающегося элемента 110 находятся в контакте друг с другом, что образует механизм 25 перемещения и механизм 108 вращения. Поверхности контакта покрыты смазкой. Когда подвижное тело 19 перемещается в направлении Y (фиг. 24A и 24B), основное тело 21 приводного тела и направляющие элементы 20 могут перемещаться относительно друг друга в направлении Y (в направлении отклонения или во втором направлении). В это время поверхности контакта скользят. Однако, так как поверхности контакта покрыты смазкой, их сопротивление скольжению является маленьким.
Кроме того, когда подвижное тело 19 перемещается с возможностью вращения, основное тело 21 приводного тела и направляющий элемент 20 могут поворачиваться относительно друг друга вокруг оси 109 вращения. Другими словами, подвижное тело 19 имеет механизм вращения, который может вращаться относительно приводного тела 18. Во время вращательного движения поверхности контакта скользят. Однако, так как контактные поверхности покрыты смазкой, их сопротивление скольжению является маленьким.
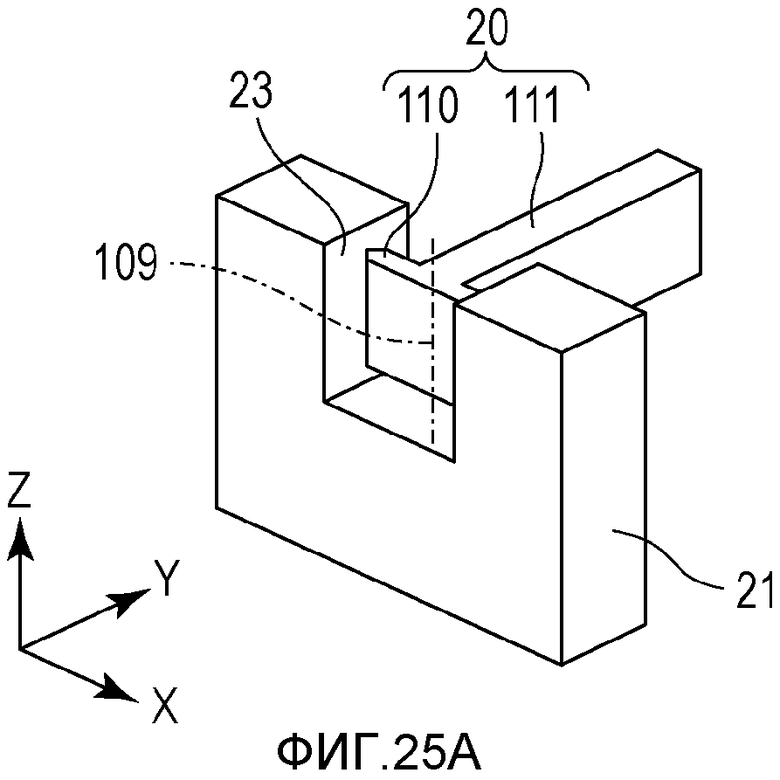
На фиг. 25A и 25B показаны схемы второй конфигурации механизма вращения. На фиг. 25A показан его вид в перспективе. На фиг. 25В показан его вид сверху. Концы вращающегося элемента 110, которые находятся в контакте с плоскими поверхностями участков 23 для прохождения приводного тела, имеют остроугольную форму. Кроме того, при такой форме, когда подвижное тело 19 перемещается с возможностью вращения, основное тело 21 приводного тела и направляющий элемент 20 могут поворачиваться относительно друг друга вокруг оси 109 вращения. Другими словами, подвижное тело 19 служит как механизм вращения, который может вращаться относительно приводного тела 18.
На фиг. 26А и 26В показаны схемы третьей конфигурации механизма вращения. На фиг. 26A показан его вид в перспективе. На фиг. 26В показан его вид сверху. Концы участков 23 для прохождения приводного тела, которые находятся в контакте с направляющим элементом 20, имеют остроугольную форму. Направляющий элемент 20 имеет форму круглого стержня. Кроме этого, при такой комбинации форм, когда подвижное тело 19 перемещается с возможностью вращения, основное тело 21 приводного тела и направляющий элемент 20 могут вращаться относительно друг друга вокруг оси вращения 109. Другими словами, подвижное тело 19 служит в качестве механизма вращения, который может поворачиваться относительно приводного тела 18.
На фиг. 27А и 27В показаны схемы четвертой конфигурации механизма вращения. На фиг. 27A показан его вид в перспективе. На фиг. 27В показан его вид сверху. Данная конфигурация отличается от третьей конфигурации механизма вращения тем, что направляющий элемент 20 имеет форму квадратного стержня. Кроме того, при такой комбинации, когда подвижное тело 19 перемещается с возможностью вращения, основное тело 21 приводного тела и направляющий элемент 20 могут вращаться относительно друг друга вокруг оси 109 вращения. Другими словами, подвижное тело 19 служит в качестве механизма вращения, которое может поворачиваться относительно приводного тела 18.
Хотя настоящее изобретение было описано со ссылкой на примерные варианты осуществления, следует понимать, что изобретение не ограничено раскрытыми примерными вариантами осуществления. Объем нижеследующей формулы изобретения должен соответствовать самой широкой интерпретации таким образом, чтобы охватывать все такие модификации и эквивалентные конструкции и функции.
Данная заявка испрашивает приоритет по патентным заявкам Японии № 2012-128283, поданной 5 июня 2012 года, и № 2013-084115, поданной 12 апреля 2013 года, каждая из которых включена сюда во всей своей полноте путем ссылки.
Перечень ссылочных позиций
8 - вибратор
18 - приводное тело
19 - подвижное тело
24 - устройство привода вибрационного типа
25 - механизм перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И КАРТРИДЖ | 2014 |
|
RU2573055C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И КАРТРИДЖ | 2015 |
|
RU2624148C2 |
| ПРОЕКЦИОННОЕ УСТРОЙСТВО ВОСПРОИЗВЕДЕНИЯ ИЗОБРАЖЕНИЙ | 2015 |
|
RU2633449C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И КАРТРИДЖ | 2012 |
|
RU2528038C2 |
| МИКРОСКОП, УСТРОЙСТВО ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ И СИСТЕМА ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ | 2011 |
|
RU2540453C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ, КАРТРИДЖ И СИСТЕМА УСТРОЙСТВ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2606343C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2549217C2 |
| ТЕХНОЛОГИЧЕСКИЙ КАРТРИДЖ И ПРИБОР ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2020 |
|
RU2752614C1 |
| КАРТРИДЖ И ЭЛЕКТРОФОТОГРАФИЧЕСКОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2021 |
|
RU2758980C1 |
| СТЕРЕОЛИТОГРАФИЧЕСКОЕ УСТРОЙСТВО, ИМЕЮЩЕЕ БЛОК ОБНАРУЖЕНИЯ ДЛЯ ОПТИЧЕСКОЙ РЕГУЛИРОВКИ И ИЗМЕНЕНИЯ ИЗОБРАЖЕНИЯ | 2020 |
|
RU2808298C2 |
Изобретение относится к устройству привода вибрационного типа, а также к устройству двухмерного привода, устройству коррекции размытости изображения. Техническим результатом является снижение потери мощности, передаваемой подвижному телу, предотвращение повреждения провода из-за деформации и обеспечение пространства, в котором могут перемещаться вибратор и элемент источника питания. Предложено устройство привода вибрационного типа содержащее: вибратор, включающий в себя устройство электромеханического преобразования энергии; приводное тело, расположенное между вибратором и подвижным телом и приводимое в движение в первом направлении с помощью вибратора; и механизм перемещения, который позволяет перемещать подвижное тело во втором направлении относительно приводного тела, в котором второе направление представляет собой направление, пересекающее первое направление в плоскости, параллельной плоскости, где вибратор и приводное тело находятся в контакте друг с другом. 9 н. и 15 з.п. ф-лы, 42 ил.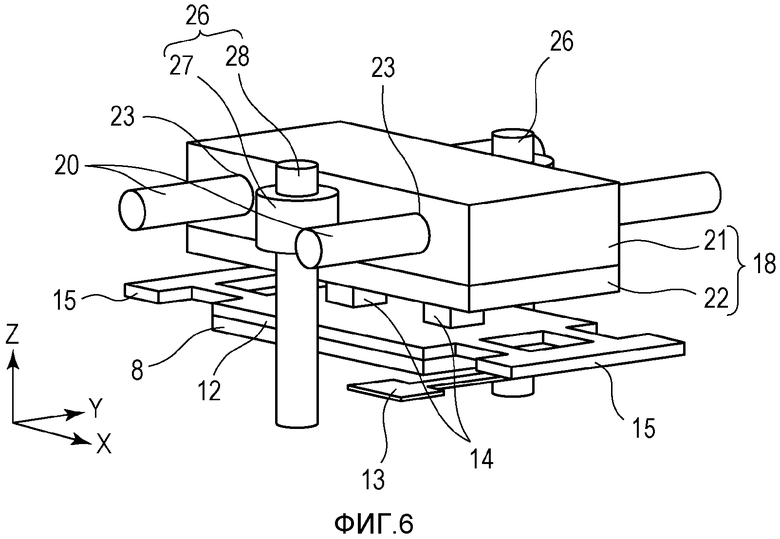
1. Устройство двухмерного привода, содержащее:
подвижное тело;
первый вибратор, включающий в себя устройство электромеханического преобразования энергии, причем первый вибратор выполнен с возможностью перемещения подвижного тела в первом направлении;
второй вибратор, включающий в себя устройство электромеханического преобразования энергии, причем второй вибратор выполнен с возможностью перемещения подвижного тела во втором направлении,
первый механизм перемещения, который позволяет перемещать подвижное тело в третьем направлении относительно первого вибратора, причем третье направление пересекает первое направление; и
второй механизм перемещения, который позволяет перемещать подвижное тело в четвертом направлении относительно второго вибратора, причем четвертое направление пересекает второе направление,
причем второе направление представляет собой направление, пересекающее первое направление в плоскости.
2. Устройство двухмерного привода по п. 1, дополнительно содержащее первое приводное тело,
причем подвижное тело выполнено с возможностью перемещения в первом направлении с помощью первого вибратора через первое приводное тело.
3. Устройство двухмерного привода по п. 1,
в котором третье направление является тем же, что и второе направление, и
в котором четвертое направление является тем же, что и первое направление.
4. Устройство двухмерного привода по любому из пп. 1-3, дополнительно содержащее второе приводное тело,
причем подвижное тело выполнено с возможностью перемещения во втором направлении с помощью второго вибратора через второе приводное тело.
5. Устройство двухмерного привода по п. 4, дополнительно содержащее механизм вращения, который может вращать подвижное тело вокруг первой оси относительно первого вибратора,
причем первая ось продолжается в направлении, пересекающем плоскость, где первое направление и второе направление пересекают друг друга.
6. Устройство двухмерного привода по п. 1, в котором первый механизм перемещения включает в себя направляющий элемент с возможностью перемещения во втором направлении.
7. Устройство двухмерного привода по п. 2, в котором первый механизм перемещения включает в себя направляющий элемент в форме круглого стержня, чья ось продолжается во втором направлении, и отверстие, которое выполнено в первом приводном теле, и чья ось продолжается во втором направлении.
8. Устройство двухмерного привода по п. 1, в котором первый механизм перемещения включает в себя направляющий элемент, который может перемещать во втором направлении, и элемент, имеющий криволинейный участок с возможностью качения.
9. Устройство двухмерного привода по п. 8, в котором криволинейный участок с возможностью качения имеет сферическую или цилиндрическую форму.
10. Устройство двухмерного привода по п. 1, в котором первый механизм перемещения включает в себя упругий элемент.
11. Устройство двухмерного привода по п. 10, в котором жесткость упругого элемента во втором направлении меньше, чем жесткость упругого элемента в первом направлении.
12. Устройство двухмерного привода по п. 10, в котором упругий элемент включает в себя упругий элемент типа пластины.
13. Устройство двухмерного привода по п. 1, дополнительно содержащее механизм ограничения, который ограничивает величину относительного перемещения первого вибратора и подвижного тела во втором направлении.
14. Устройство двухмерного привода по п. 2, дополнительно содержащее два механизма ограничения,
причем каждый из двух механизмов ограничения выполнен с возможностью ограничения величины относительного перемещения первого вибратора и первого приводного тела во втором направлении, и
причем два механизма ограничения расположены таким образом, чтобы удерживать между ними первое приводное тело.
15. Устройство двухмерного привода по п. 1, дополнительно содержащее механизм вращения, который может вращать подвижное тело вокруг первой оси относительно первого вибратора,
причем первая ось продолжается в направлении, пересекающем плоскость, где первое направление и второе направление пересекают друг друга.
16. Устройство двухмерного привода по п. 15,
в котором первый механизм перемещения включает в себя направляющий элемент, который может перемещать во втором направлении, и элемент, имеющий криволинейный участок с возможностью качения,
в котором центр вращения элемента, имеющего криволинейный участок с возможностью качения, во время качения по существу совпадает с центром вращения механизма вращения.
17. Устройство коррекции размытости изображения, содержащее:
устройство двухмерного привода по п. 4;
оптическую линзу или элемент захвата изображения, установленные на подвижном теле упомянутого устройства двухмерного привода.
18. Сменный объектив, содержащий:
устройство двухмерного привода по п. 4; и
оптическую линзу, установленную на подвижном теле упомянутого устройства двухмерного привода.
19. Устройство захвата изображения, содержащее:
устройство двухмерного привода по п. 4;
оптическую линзу или элемент захвата изображения, установленные на подвижном теле упомянутого устройства двухмерного привода; и
источник питания.
20. Автоматический предметный столик, содержащий устройство двухмерного привода по п. 4, в котором участок установки объекта наблюдения установлен на подвижном теле упомянутого устройства двухмерного привода.
21. Устройство коррекции размытости изображения, содержащее:
устройство двухмерного привода по любому одному из пп. 1, 2, 6-16; и
оптическую линзу или элемент захвата изображения, установленные на подвижном теле упомянутого устройства двухмерного привода.
22. Сменный объектив, содержащий:
устройство двухмерного привода по любому одному из пп. 1, 2, 6-16; и
оптическую линзу, установленную на подвижном теле упомянутого устройства двухмерного привода.
23. Устройство захвата изображения, содержащее:
устройство двухмерного привода по любому одному из пп. 1, 2, 6-16;
оптическую линзу или элемент захвата изображения, установленные на подвижном теле упомянутого устройства двухмерного привода; и
источник питания.
24. Автоматический предметный столик, содержащий устройство двухмерного привода по любому одному из пп. 1, 2, 6-16, в котором участок установки объекта наблюдения установлен на подвижном теле упомянутого устройства двухмерного привода.
| WO 2012026079 A1, 2012-03-01 | |||
| US 2006043824 A1, 2006-03-02 | |||
| US 2011317264 A1, 2011-12-29 | |||
| US 7084550 B2, 2006-08-01 | |||
| US 2012082445 A1, 2012-04-05 | |||
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ | 1994 |
|
RU2091843C1 |

