Область техники, к которой относится изобретение
Настоящее изобретение относится к системе управления приводом транспортного средства и к соответствующему способу. Изобретение в особенности относится к управлению транспортным средством и его приводом при трогании транспортного средства с места.
Уровень техники
Как хорошо известно водителям автотранспортных средств, при трогании таких средств с места могут возникать ситуации, в которых момент вращения ведущих колес недостаточен, а колеса могут проскальзывать или не будут вращаться из-за неблагоприятных условий трогания, и транспортное средство не сдвинется с места, например тяжелый грузовик на крутом подъеме. В некоторых случаях транспортное средство может начать движение, однако сопротивление движению может быть велико, так что возникает опасность сжечь сцепление, установленное между двигателем и коробкой передач транспортного средства, или результатом трогания с места в этом случае может быть сильный износ дисков сцепления. В этих случаях может не обеспечиваться достаточное управление муфтой сцепления или она может иметь недостаточные размеры для управления процессом трогания с места без сильного износа дисков сцепления. Таким образом, существует потребность в системе трогания с места с улучшенным управлением для транспортных средств, в особенности для автомобилей, предназначенных для тяжелых условий эксплуатации, когда может возникать очень большое сопротивление троганию транспортного средства с места, например в связи тяжелым грузом, и/или крутым подъемом, или состоянием дорожного покрытия.
Раскрытие изобретения
Целью настоящего изобретения является создание системы тяги и соответствующего способа для улучшения характеристик трогания с места транспортного средства, особенно тяжелого (большегрузного) дорожного транспортного средства, такого как трейлер или автобус, которое предназначено для движения по дороге, прежде всего, в условиях нормального ВЩСКЕАдорожного движения в городе, или по автомагистрали. Предполагается, что такая система тяги будет частью обычной автоматической или полуавтоматической системы управления переключением передач или автоматизированным компонентом обычной коробки передач с ручным переключением.
Система тяги по настоящему изобретению содержит по меньшей мере первое ведущее колесо, предпочтительно первую пару колес на первом мосту, с приводом от первой движительной системы, например, представляющей собой механический привод, содержащий коробку передачи, соединенную с двигателем внутреннего сгорания. Система тяги содержит также второе колесо, предпочтительно вторую пару колес с приводом от второй движительной системы, например от одного или нескольких гидравлических приводов, которые могут быть сконфигурированы таким образом, что один двигатель приводит в движение один мост, на котором установлены два колеса, или каждое колесо вращается отдельным приводом. Первая и вторая движительные системы сконфигурированы таким образом, что управление ими осуществляется независимо друг от друга. Независимое управление означает то, что управление этими системами может осуществляться таким образом, что в любой момент может использоваться любая из этих систем или обе системы одновременно, и что, если обе системы используются одновременно для создания крутящего момента, возможно независимое регулирование крутящих моментов этих систем. Таким образом, изобретение предназначено для применения на транспортных средствах, снабженных обычным механическим приводом с двигателем внутреннего сгорания, который используется в качестве основного источника тяги. Транспортное средство также снабжено гидравлической движительной установкой, которая используется в качестве вспомогательного источника тяги. Преимущество использования гидравлической движительной установки по сравнению, например, с электрическим приводом заключается в том, что она может быть более компактной, особенно, если на транспортном средстве уже имеется какая-либо гидравлическая система. Таким образом, гидравлическая движительная система, устанавливаемая на транспортное средство с самого начала или в рамках его модернизации, может быть более эффективным решением по сравнению с электрической движительной системой, например, два гидравлических двигателя могут быть соединены с двумя колесами неведущего моста. В одном из вариантов гидравлический привод может обеспечиваться для двух управляемых передних колес тяжелого грузовика или автобуса, в котором крутящий момент двигателя внутреннего сгорания передается только на задние мосты.
Система тяги также содержит по меньшей мере один датчик для определения состояния трогания с места. В качестве такого датчика может использоваться уже имеющийся датчик, например датчик скорости транспортного средства, датчик работы двигателя, датчик отпускания стояночного тормоза, датчик включения передачи и/или муфты сцепления. Для определения состояния трогания с места могут использования показания нескольких датчиков, например датчика работы двигателя, датчика включения сцепления и датчик включения передачи. Для разных типов транспортного средства и движительной системы соответствующие датчики могут различаться, например, в некоторых случаях на транспортных средствах используется необычная механическая муфта сцепления, а гидродинамическая система передачи мощности, такая как гидротрансформатор или "мокрая" муфта сцепления, и в этом случае состояние трогания с места может определяться по превышению передаваемой мощностью некоторой заданной величины. Также важно определить предполагаемое направление трогания с места, чтобы можно было создавать тягу гидравлической движительной системы в правильном направлении. В предпочтительных вариантах направление движения определяется по включаемой передаче заднего или переднего хода.
Система тяги также содержит блок управления для управления второй движительной системой. Блок управления соединен с вышеупомянутым датчиком определения состояния трогания с места. Конечно, блок управления может быть соединен с несколькими разными датчиками, используемыми для определения состояния трогания с места. Однако датчики необязательно должны быть напрямую подсоединены к блоку управления, а может использоваться конфигурация, в которой для определения состояния трогания с места может использоваться информация от другого блока управления или от устройства сбора информации датчиков.
Способ управления системой тяги включает:
- обеспечение в автоматическом режиме тягового усилия второй движительной системой в ответ на сигнал, указывающий на возникшее состояние трогания с места, и сигнал, указывающий, что первая движительная система обеспечивает или будет обеспечивать тяговое усилие;
- определение в автоматическом режиме состояния трогания с места с помощью датчика и передачу в блок управления сигнала, указывающего на состояние трогания с места. Как уже указывалось, состояние трогания с места может быть определено различными способами и по различным признакам, используемым в качестве указания на состояние трогания с места, например запуск двигателя внутреннего сгорания, включение муфты сцепления или переключение коробки передач из нейтрального или стояночного положения в положение движения транспортного средства;
- обеспечение в автоматическом режиме тягового усилия второй движительной системой в ответ на сигнал, указывающий на возникшее состояние трогания с места, и сигнал, указывающий, что первая движительная система обеспечивает или будет обеспечивать тяговое усилие. Таким образом, система способна определить возникновение состояния трогания с места, так что водителю не нужно вводить какие-либо команды или данные для обеспечения работы системы помощи при трогании с места. Однако система может быть снабжена переключателем для включения автоматического режима помощи при трогании с места, обеспечивающей дополнительный крутящий момент при трогании с места транспортного средства. В некоторых случаях указание состояния трогания с места и возникновение требуемой тяги может быть одним и тем же признаком, например началом включения муфты сцепления. В других случаях это могут быть разные признаки, например определяемое состояние трогания с места может быть запуском двигателя внутреннего сгорания; и
указание на то, что тяга обеспечивается или будет обеспечиваться первой системой тяги, может быть одним или несколькими из следующих состояний или действий:
переключение коробки из нейтрального положения в положение заданной передачи;
отпускание тормоза;
указание на то, что транспортное средство находится в движении (в том самом направлении, на которое указывает включенная передача), или
включение муфты сцепления.
Таким образом, существует много разных способов, используя которые специалист в данной области техники может определить состояние трогания с места и использовать эту информацию для передачи в блок управления для передачи сигнала на запуск второй движительной системы,
- управление в ручном режиме крутящим моментом, создаваемым первой движительной системой. Соответственно управление крутящим моментом, создаваемым первой движительной системой, осуществляется как обычно с использованием обычных органов и функций управления. В общем случае это означает, что движением транспортного средства управляют как обычно с использованием педали управления скоростью (акселератор), органов управления тормозами, муфтой сцепления и коробкой передач,
- регулирование блоком управления крутящего момента, создаваемого второй движительной системой. Таким образом, блок управления предпочтительно программируют для управления в автоматическом режиме второй движительной системой. В предпочтительных вариантах сигналы управления вырабатываются в соответствии с управлением первой движительной системой. Одна из целей системы помощи при трогании с места заключается в осуществлении этой функции в автоматическом режиме без необходимости управления с использованием дополнительного органа управления. Управление второй движительной системой может осуществляться блоком управления, например, таким образом, чтобы крутящий момент, создаваемый второй движительной системой, был пропорционален крутящему моменту, создаваемому первой движительной системой. Однако может быть также необходимо обеспечивать постоянный крутящий момент или же управление может обеспечивать некоторое сочетание постоянного и пропорционального крутящего момента. Например, может использоваться фиксированный минимальный крутящий момент, обеспечиваемый второй движительной системой при включении автоматической системы помощи при трогании с места, а затем, когда крутящий момент, требуемый от первой движительной системы, превышает некоторую пороговую величину, крутящий момент, создаваемый второй движительной системой, будет увеличиваться пропорционально крутящему моменту, создаваемому первой движительной системой. Достоинство такого алгоритма может заключаться в том, что вторая движительная система обеспечивает сравнительно большой крутящий момент в самый первый момент движения транспортного средства в процессе трогания с места, что может снижать износ дисков сцепления первой, механической, движительной системы, поскольку проблема износа дисков сцепления для второй движительной системы не существует. Таким образом, достоинство вышеописанной системы заключается в оказании помощи при трогании с места не только в случае крутого подъема или тяжелого груза, но и в любых условиях трогания с места, в результате чего снижается износ дисков сцепления в первой, механической, движительной системе.
Система управления приводом может также содержать датчики величин, связанных с тяговым усилием одного или нескольких колес, например датчики скорости вращения отдельных колес и датчик скорости транспортного средства, так что определяется тяга, создаваемая колесами, и может быть обнаружено их проскальзывание. Конечно, могут использоваться также и акселерометры, которые непосредственно измеряют ускорение колес. Таким образом, блок управления может быть запрограммирован таким образом, чтобы он уменьшал крутящий момент, передаваемый на колеса, соединенные со второй, гидравлической, движительной системой, если обнаружено проскальзывание этих колес. Крутящий момент на колесах с гидравлическим приводом может регулироваться путем создания тормозного воздействия на проскальзывающее колесо, уменьшения потока гидравлической жидкости, подаваемой к колесу (с помощью дросселя и/или уменьшения потока, подаваемого насосом) или изменения рабочего объема гидравлического двигателя (если такая возможность имеется). Безусловно, также можно увеличивать крутящий момент на колесах с гидравлическим приводом, если обнаружено проскальзывание колес с механическим приводом, присоединенных к первой движительной системе.
Функция помощи при трогании с места будет работать пока не будет выполнен запрограммированный критерий прекращения функции или она не будет выключена вручную. Критерием прекращения функции может быть прохождение транспортным средством определенного расстояния в одном направлении, истечение заданного интервала времени или превышение скоростью транспортного средства заданной пороговой величины.
В одном из алгоритмов управление колесами с гидравлическим приводом осуществляют таким образом, чтобы обеспечивался постоянный крутящий момент при включении функции помощи при трогании с места, причем этот крутящий момент поддерживают до тех пор, пока крутящий момент на колесах с механическим приводом не превысит определенной пороговой величины, после чего крутящий момент на колесах с гидравлическим приводом повышают прямо пропорционально крутящему моменту на колесах с механическим приводом, пока скорость транспортного средства не превысит определенную пороговую величину.
Нижеприведенное описание относится к системе тяги для транспортного средства, содержащего первую пару колес с механическим приводом, соединенным с двигателем внутреннего сгорания, и вторую пару колес с гидравлическим приводом.
Краткое описание чертежей
На фиг. 1 - схема системы тяги для транспортного средства, снабженного двумя движительным системами, в которой может быть применено настоящее изобретение;
на фиг. 2 - схема подходящей гидравлической системы, которая может быть использована в системе тяги фиг. 1;
на фиг. 3 - схематический вид сечения гидравлического двигателя.
Осуществление изобретения
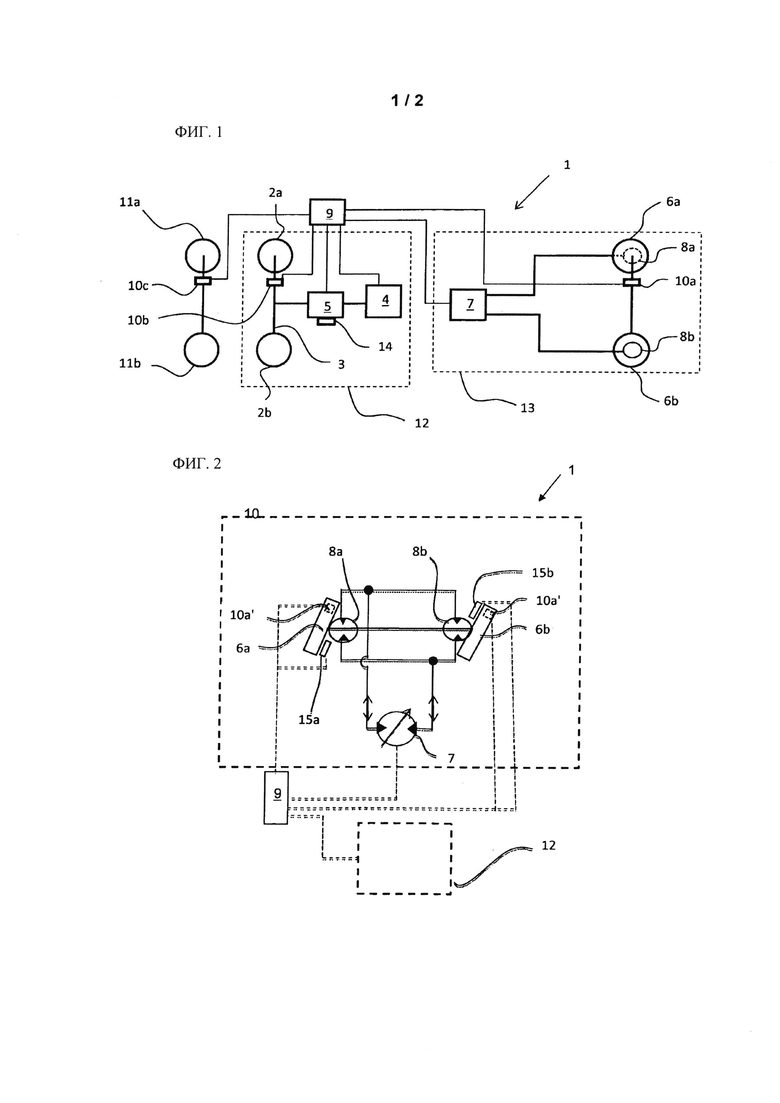
На фиг. 1 приведена схема системы 1 тяги для тяжелогрузного автомобиля. Система 1 тяги содержит первую, механическую, движительную систему 12 и вторую, гидравлическую, движительную систему 13. Первая, механическая, движительная система 12 содержит на заднем ведущем мосту 3 пару ведущих колес 2a, 2b, на которые передается мощность от двигателя 4 внутреннего сгорания. Задний ведущий мост 3 подсоединен к двигателю 4 через коробку 5 передач. Коробка 5 передач может быть ступенчатой коробкой с ручным, полуавтоматическим или автоматическим управлением, и механизм привода может содержать коробку передач с двойным сцеплением, которая позволяет уменьшить время переключения передач. Вторая, гидравлическая, движительная система 13 содержит на переднем мосту вторую пару ведущих колес 6a, 6b, на которые передается мощность от двух гидравлических двигателей (колесных гидромоторов) 8a, 8b, подсоединенных к гидравлическому насосу 7. Система 1 тяги также содержит блок 9 управления, который соединен с двигателем 4, коробкой 5 передач и гидравлическим насосом 7. Хотя соединение блока 9 управления с двигателем 4 и коробкой 5 передач не является необходимым, считается, что это может улучшать управление гидравлической движительной системой 13. Безусловно, блок управления может быть также соединен и с другими частями движительных систем 12, 13, например может быть соединен с гидравлическими двигателями 8a, 8b для подачи выходных сигналов на клапаны управления этих двигателей. Блок 9 управления также соединен с датчиками 10a, 10b, 10c, обеспечивающими информацию о скорости вращения передних ведущих колес 6a, 6b, задних ведущих колес 2a, 2b и двух неведущих колес 11a, 11b. Вместо этих датчиков или дополнительно к ним могут использоваться и другие датчики для определения состояния трогания с места транспортного средства и управления гидравлической движительной установкой, например блок управления может быть соединен с датчиками состояния коробки передач, состояния сцепления и/или числа оборотов двигателя внутреннего сгорания или выходного крутящего момента. Блок 9 управления может быть также соединен с переключателем, который может использоваться для включения/выключения автоматической системы помощи при трогании с места. Однако вышеуказанные датчики 10a, 10b, 10c скорости могут использоваться для определения состояния трогания с места транспортного средства, а также для управления выходным крутящим моментом гидравлической движительной системы 13. Система помощи при трогании с места по настоящему изобретению будет описана ниже на примере системы 1 тяги, показанной на фиг. 1.
В этой системе датчики 10a, 10b, 10c скорости колес могут использоваться для управления системой помощи при трогании с места транспортного средства. Например, блок 9 управления может передавать сигнал управления в гидравлический насос для начала подачи потока гидравлической жидкости в гидравлические двигатели 8a, 8b в соответствии с информацией об измеренной скорости вращения колес, поступающими от датчиков 10a, 10b, 10c, которые указывают на то, что скорость транспортного увеличивается от нуля при движении вперед или назад. Соответственно поток гидравлической жидкости будет направляться таким образом, чтобы крутящий момент, подаваемый на колеса 6a, 6b с гидравлическим приводом, действовал для придания движения транспортному средству в нужном направлении. Управление направлением движения этих колес может осуществляться по-разному в зависимости от используемой системы, например изменение направления потока гидравлической жидкости может осуществляться гидравлическим насосом, способным обеспечивать поток в разных направлениях, или же путем использования одного или нескольких клапанов, которые в соответствии с командами управления могут изменять направление потока гидравлической жидкости, протекающей через гидравлические двигатели. Крутящий момент гидравлических двигателей может регулироваться насосом с переменным рабочим объемом, регулированием скорости вращения гидравлического насоса, использованием двигателей с переменным рабочим объемом или регулированием потока гидравлической жидкости с помощью перепускных клапанов или ограничителей потока. Соответственно существует множество разных способов управления колесами с гидравлическим приводом для обеспечения необходимой величины крутящего момента для движения в нужном направлении.
В одном из способов управления автоматической системой помощи при трогании с места и определения состояния трогания с места может использоваться информация, получаемая из коробки передач и/или из муфты сцепления. На фиг. 1 схематически показан датчик 14, связанный с коробкой 5 передач. Этот датчик 14 может определять состояние коробки передач и передавать сигнал на обеспечение крутящего момента гидравлической движительной системой 13, когда осуществляется переключение коробки передач из нейтрального положения на передачу переднего или заднего хода. В том случае когда в механической трансмиссии используется муфта сцепления, датчик 14 (или другой датчик) может быть выполнен для определения момента "схватывания" сцепления, и в этот момент датчик передает сигнал, указывающий на возникновение состояния трогания с места. Безусловно, аналогичный датчик может использоваться для определения степени сцепления дисков муфты сцепления или в случае гидротрансформатора или гидродинамической муфты индикации состояния трогания, когда передаваемый крутящий момент превышает заданную пороговую величину. Также можно определять крутящий момент, создаваемый двигателем внутреннего сгорания, поскольку в основном он передается по трансмиссии через муфту сцепления.
Может задаваться автоматический или ручной режим включения автоматической системы помощи при трогании с места. При вождении транспортного средства в нормальных условиях обычно функцию автоматического включения системы помощи при трогании с места отключают. Автоматический режим включения обычно активизируют только в условиях трогания с места. Этот режим может автоматически отключаться, когда скорость транспортного средства превышает заданную пороговую величину, например 15 км/ч.
Система тяги транспортного средства может содержать дополнительные ведущие колеса, входящие в состав вышеуказанных движительных систем или в состав дополнительной, третьей, движительной системы. Однако дополнительную пару колес скорее всего следует интегрировать в уже существующие системы. Неведущие задние колеса 11a, 11b и/или передние колеса с гидравлическим приводом также могут быть соединены с механической движительной системой 13. Также очевидно, что гидравлические двигатели 8a, 8b могут быть установлены на любом из задних колес 2a, 2b, 11a, 11b вместо передних колес 6a, 6b или же гидравлические двигатели могут быть установлены на всех колесах. Соответственно конкретные конфигурации могут варьироваться в пределах объема изобретения, при условии что по меньшей мере одно колесо или пара колес соединены с первым приводным механизмом, передающим мощность от двигателя внутреннего сгорания, и по меньшей мере одно другое колесо или пара колес соединены с другим приводным механизмом, передающим мощность от гидравлических двигателей. Достоинство использования гидравлической системы заключается в том, что в принципе гораздо легче обеспечить дополнительную движительную систему для неведущих колес, в особенности для управляемых колес, по сравнению с дополнительным электрическим двигателем или механическим источником тяги.
Достоинство обеспечения транспортного средства основной движительной системой 12 в форме механического привода, передающего мощность от двигателя 4 внутреннего сгорания, и вспомогательной движительной системой 13 в форме гидравлических двигателей 8a, 8b заключается в том, что такая комбинация обеспечивает эффективную движущую силу в нормальных режимах движения от механической движительной системы, в то время как гидравлическая движительная система может использоваться, когда возникает необходимость в дополнительной силе, например при трогании транспортного средства с места. Это достоинство особенно проявляется, когда по меньшей мере первая пара колес 2a, 2b соединена с механическим приводом, передающим мощность от двигателя 4, в то время как другое колесо или вторая пара колес 6a, 6b приводятся гидравлическими двигателями 8a, 8b соответственно. Такая конфигурация может улучшить тягу и, кроме того, снижается вероятность проскальзывания колес. В наиболее предпочтительных вариантах привод от гидравлической двигательной системы обеспечивается для управляемых передних колес, поскольку установить гидравлические двигатели в ступицах колес можно гораздо проще по сравнению с обеспечением механического привода, который приводит к существенному усложнению конструкции управляемых мостов, или с использованием электрических двигателей, поскольку обычно их размеры больше, и они больше весят по сравнению с гидравлическими двигателями, обеспечивающими одинаковый крутящий момент.
Как уже указывалось, в целях настоящего изобретения могут использоваться различные гидравлические двигательные системы. На фиг. 2 приведена схема подходящей гидравлической системы, которая может быть использована в движительной системе фиг. 1. На фиг. 2 не указаны компоненты механической движительной системы 12, и сама эта система указана на схеме лишь для того, чтобы показать, что она является частью всей системы тяги, и что она соединена с блоком 9 управления для передачи в него входных сигналов для их обработки и расчета управляющих сигналов, передаваемых в гидравлическую движительную систему, то есть в насос 7 и, возможно, в другие блоки, например тормозные устройства 15a и 15b колес. Система, рассмотренная в настоящем описании, представляет собой систему с высокой степенью надежности, которая включает минимум устройств и функций, чтобы ее можно было установить на транспортном средстве в качестве вспомогательной движительной системы, которая предназначена для использования в качестве дополнительного источника мощности лишь в некоторых случаях. Как уже указывалось, транспортное средство имеет вторую пару управляемых ведущих колес 6a, 6b, установленных на переднем мосту, и колеса 6a, 6b снабжены гидравлическими двигателями 8a, 8b соответственно, которые подсоединены к гидравлической системе, содержащей гидравлический насос 7. Насос 7 в этой системе представляет собой реверсивный насос с переменным рабочим объемом, работающий по замкнутой схеме. Насос может приводиться непосредственно двигателем внутреннего сгорания. Соответственно насос, управление работой которого осуществляет электронный блок 9 управления, может работать для направления потока гидравлической жидкости в требуемом направлении с возможностью регулирования величины потока путем изменения рабочего объема насоса. Блок 9 управления также соединен с разными датчиками, такими как датчики 10a′, 10a″ скорости вращения передних колес и соответствующие датчики механической движительной системы 12. Для максимально возможного упрощения гидравлической движительной системы гидравлические двигатели 8a, 8b соединяют параллельно, так что гидравлическая жидкость поступает в оба двигателя с одинаковым давлением, и в такой системе не используются клапаны или дроссели. Одно из достоинств такой гидравлической системы с параллельно подсоединенными двигателями заключается в том, что в этом случае происходит автоматическая компенсация разных радиусов поворота колес 6a, 6b, например, если трогание с места транспортного средства осуществляется с его одновременным поворотом, гидравлическая жидкость, подаваемая в оба двигателя, имеет одинаковое давление, и соответственно на обоих колесах будет обеспечиваться одинаковый крутящий момент. Для предотвращения падения тяги, создаваемой колесами 6a, 6b с гидравлическим приводом, из-за их проскальзывания, что может приводить к падению мощности на обоих колесах при параллельном соединении, блок 9 управления может быть подсоединен к тормозным устройствам 15a, 15b этих колес для управления торможением. Проскальзывание колес можно определить путем сравнения скоростей вращения передних колес 6a, 6b с гидравлическим приводом, и в этом случае сравнение может включать учет разницы скоростей колес в результате поворота транспортного средства. Также можно сравнивать скорости передних колес со скоростями других колес на других мостах транспортного средства (например, на неведущих мостах) или с информацией датчика путевой скорости (радиолокационный датчик, GPS и т.п.). Как показано на схеме фиг. 2, электронный блок 9 управления соединен с механической движительной системой 12 и может получать соответствующую информацию, такую как число оборотов двигателя и/или состояние коробки передач, для вычисления выходного крутящего момента механической движительной системы и для соответствующего управления гидравлической силовой установкой в зависимости от крутящего момента, передаваемого на задние ведущие колеса (см. фиг. 1).
Для этой цели могут использоваться самые разные алгоритмы управления. В общем случае желательно, чтобы крутящий момент передавался на колеса от первой движительной системы и от второй движительной системы, по существу, одновременно. Однако по соображениям практической реализации может быть проще, или даже может быть необходимо обеспечивать крутящий момент от одной системы с небольшим опережением относительно подачи крутящего момента другой системой. По сравнению с вариантом, в котором вообще не может быть обеспечен дополнительный крутящий момент при трогании с места и автоматическое управление крутящим моментом, создаваемым второй движительной системой, выгоды очевидны. Таким образом, если требуется, чтобы управление крутящим моментом при трогании с места обеспечивалось разными движительными системами одновременно и чтобы крутящий момент соответствующим образом распределялся между отдельными ведущими колесами для оптимизации тяги, даже очень простая система управления, обеспечивающая дополнительную тягу от второй движительной системы, обеспечивает существенное улучшение характеристик трогания с места транспортного средства. Более сложная система управления, в которой используется входная информация, такая как нагрузка, состояние дороги (грязь, песок, лед), проскальзывание колес, крутящий момент, безусловно будет улучшать характеристики функции трогания с места и будет улучшать общие характеристики транспортного средства при трогании с места.
На фиг. 3 приведен схематический вид сечения гидравлического двигателя 8, подходящего для системы, схема которой приведена на фиг. 1. Гидравлический двигатель 8 содержит внешнюю обойму 20, имеющую, по существу, шестиугольную форму с закругленными краями 21 и закругленными выступающими внутрь частями 22 между краями 21. Обойма 20 вращается вместе с колесом, соединенным с гидравлическим двигателем 8. Обойма 20 также делится на зоны 23, 24, формируемые между вершинами выступающих частей 22 и краями 21. Зона 23, которая проходит от края 21 до вершины выступающей части 22 по часовой стрелке, является рабочей при вращении обоймы по часовой стрелке и соответственно будет указываться ниже как зона, соответствующая переднему ходу. Зона 24, которая проходит от края 21 до вершины выступающей части 22 против часовой стрелки, является рабочей при вращении обоймы против часовой стрелке и соответственно будет указываться ниже как зона, соответствующая заднему ходу. Гидравлический двигатель содержит также центральную распределительную пластину 25, которая также вращается вместе с колесом и имеет каналы 26 переднего хода и каналы 27 заднего хода. Каналы 26, 27 имеют по 6 отверстий, которые соответствуют восьми гидравлическим поршням 28 и соединяются с их цилиндрами гидравлически, причем гидравлические поршни 28 расположены симметрично вокруг оси вращения двигателя 8 в неподвижном блоке 29 цилиндров. Каналы 26 и 27 переднего и заднего хода соответственно выполнены таким образом, что каналы 26 находятся в тех же секторах окружности, что и зоны 23 переднего хода обоймы 20, а каналы 27 находятся в тех же секторах окружности, что и зоны 24 заднего хода для подачи гидравлической жидкости к поршням 28. Когда гидравлическая жидкость в канале 26 переднего хода или в канале 27 заднего хода находится под давлением, обойма 20 и прикрепленное к ней колесо будут двигаться соответствующим образом для обеспечения переднего или заднего хода транспортного средства. На фиг. 3 показано, что два поршня 28d, h (поршни вверху слева и внизу справа) совмещены и гидравлически соединены с отверстиями канала 26 переднего хода и готовы к поступлению сжатой гидравлической жидкости из гидравлической системы. Если гидравлическая жидкость в канале 26 переднего хода находится под давлением, то верхний левый поршень 28g и нижний правый поршень 28d будут выталкиваться наружу и будут вызывать вращение обоймы 20 и прикрепленного к ней колеса по часовой стрелке (передний ход). При вращении обоймы 20 и распределительной пластины 25 соединение с цилиндрами поршней 28d, g (поршни вверх слева и внизу справа) прекращается, давление в цилиндрах падает, и поршни 28d, h могут быть легко вдвинуты в неподвижный блок 29 цилиндров. По мере того как обойма 20 вращается в направлении переднего хода, цилиндры левого поршня 28f и правого поршня 28c соединяются с каналом 26 переднего хода, и эти поршни 28c, f будут выталкиваться наружу и обеспечивать продолжающееся вращение обоймы 20 в направлении переднего хода. Этот процесс будет продолжаться для всех цилиндров 28, пока давление в каналах 26 переднего хода не будет сброшено. Если необходимо обеспечивать движение в обратном направлении, то обеспечивается давление в каналах 27 обратного хода, в результате чего будет обеспечиваться вращение в противоположную сторону обоймы 20 и прикрепленного к ней колеса. Для отсоединения гидравлического двигателя может быть обеспечено давление в пространстве между обоймой 20 и блоком 29 цилиндров (обычно это пространство в гидравлическом двигателе, формируемое его кожухом), в результате чего поршни будут вдвинуты в блок 29 цилиндров, и колесо, соединенное с гидравлическим двигателем 8 может вращаться более или менее свободно. Соответственно гидравлические двигатели могут быть отсоединены эффективным образом, так что при отсоединении двигателя будут иметь место лишь небольшие потери на дополнительное трение, вносимое двигателем. Поскольку гидравлические двигатели обычно не предназначены для использования в качестве источников движения для грузовых транспортных средств при их движении по дороге или по автостраде на скорости, превышающей 30 км/ч, это важное обстоятельство, что при установке гидравлических двигателей на колеса транспортного средства эти двигатели не оказывают существенного сопротивления качению колес после их отсоединения.
Хотя в рассмотренном примере в обойме используется шесть кулачков, их количество может быть другим, например 9 или 10. Аналогично, количество используемых поршней необязательно должно быть равно 8, а может быть равно, например, 10 или 12.
Вышеописанный вариант представляет собой пример системы тяги для грузового транспортного средства с двумя задними колесами и двумя передними колесами. Однако такая система может использоваться на грузовом транспортном средстве, имеющем несколько пар передних колес и несколько пар задних колес. Соответственно в этом случае может использоваться дополнительный передний мост с ведущими колесами с гидравлическим приводом, а также дополнительный задний мост с ведущими колесами, на которые передается крутящий момент от двигателя внутреннего сгорания. Также на неведущих задних мостах грузового транспортного средства могут использоваться дополнительные пары колес с гидравлическим приводом.
Этот тип системы помощи при трогании с места обладает особенным достоинством. Если насос выполнен таким образом, что он имеет переменный рабочий объем в обоих направлениях потока от нуля до полного объема (так называемый реверсивный насос с переменным рабочим объемом), то передаточное отношение в гидравлической движительной системе можно плавно регулировать от бесконечности до минимальной величины. Гидравлические двигатели и насос могут иметь такое отношение объемов, что 10 оборотов насоса обеспечивают объемный поток, соответствующий одному обороту двигателя при максимальном рабочем объеме насоса, то есть 20 оборотов насоса соответствуют одному полному обороту 2 гидравлических двигателей. При использовании уменьшенного рабочего объема при трогании с места можно будет обеспечить максимальный крутящий момент на колесах с гидравлическим приводом без потребления какой-либо существенной мощности от двигателя внутреннего сгорания. Для обеспечения быстрого запуска гидравлического насоса он может быть подсоединен к выходному валу двигателя внутреннего сгорания, так что насос может быть запущен сразу же после включения двигателя. Соответственно, чтобы обеспечить возможность включения гидравлической системы при трогании с места без какой-либо задержки, связанной с запуском насоса, насос должен быть подсоединен к выходному валу двигателя. Возможность использования гидравлической движительной системы одновременно с механической движительной системой при трогании с места может быть особенно важной для движения по сыпучему или илистому грунту. В этих условиях серьезное проскальзывание колеса существенно снижает возможность для пробуксовывающего колеса обеспечить необходимую тягу в связи с погружением в поверхностный слой и/или движением по верхнему поверхностному слою, имеющему более жесткую структуру, чем подстилающий слой, например дерн. Однако насос также может быть присоединен к выходному валу коробки передач, но в этом случае насос не может быть запущен, пока не включена какая-либо передача, и процесс трогания с места, в котором используется гидравлическая и механическая движительные системы, не может быть осуществлен так же быстро, как в случае присоединения насоса непосредственно к двигателю. Однако такая конфигурация обладает тем преимуществом, что в этом случае направление потока гидравлической жидкости и соответственно направление тяги, создаваемой гидравлической системой, будет определяться направлением вращения выходного вала коробки передач, и при этом нет необходимости в управлении для обеспечения нужного направления тяги, создаваемой гидравлической движительной системой, то есть, нет необходимости в реверсивном насосе.
Таким образом, использование двух отдельных движительных систем, соединенных с разными колесами или с разными парами колес, обеспечивает ряд полезных возможностей по улучшению функции помощи при трогании с места в автоматическом режиме, которые определяются объемом изобретения. Для колес с гидравлическим приводом, обеспечиваемым отдельными двигателями колес, для расчета необходимой скорости управляемых колес могут использоваться датчики угла поворота транспортного средства. Специалистам в данной области техники хорошо известны способы и технические средства для определения скорости вращения колеса, скорости движения транспортного средства и/или степени проскальзывания колеса, которые могут использоваться в качестве входной информации для управления функцией помощи при трогании с места в автоматическом режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТРОГАНИЯ С МЕСТА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2604935C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА В СВЯЗИ С ЗАПУСКОМ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ ЭТОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2600417C2 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ В ГИБРИДНОМ ТРАНСПОРТНОМ СРЕДСТВЕ | 2013 |
|
RU2605139C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСМИССИЕЙ В ТРАНСПОРТНЫХ СРЕДСТВАХ | 2008 |
|
RU2486085C2 |
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В ГИБРИДНОМ ТРАНСПОРТНОМ СРЕДСТВЕ | 2013 |
|
RU2607907C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДИСКОВЫМ СЦЕПЛЕНИЕМ | 2006 |
|
RU2426020C2 |
| СПОСОБ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2608987C2 |
| СПОСОБ УСКОРЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2605223C2 |
| УСТРОЙСТВО ГИДРАВЛИЧЕСКОЙ ТРАНСМИССИИ | 2014 |
|
RU2650339C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ СЖАТОГО ВОЗДУХА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ В ПРОЦЕССЕ ТРОГАНИЯ С МЕСТА | 2009 |
|
RU2482298C2 |

Изобретение относится к управлению приводом транспортного средства. Способ управления системой тяги транспортного средства, включающего движительную систему с механическим приводом от двигателя внутреннего сгорания и вторую движительную систему с гидравлическим насосом, включает определение и передачу в блок управления в автоматическом режиме сигнала о состоянии трогания с места и обеспечение тяги от второй движительной системы в ответ на состояние трогания с места. Затем управляют в ручном режиме крутящим моментом от первой движительной системы и управление в автоматическом режиме второй движительной системой с помощью блока управления. Вторая движительная система содержит два гидравлических двигателя колес, соединенных параллельно и установленных на соответствующих передних управляемых колесах. Изобретение также относится к соответствующей системе тяги и тяжелому транспортному средству с системой тяги. Улучшаются характеристики трогания с места. 3 н. и 11 з.п. ф-лы, 3 ил.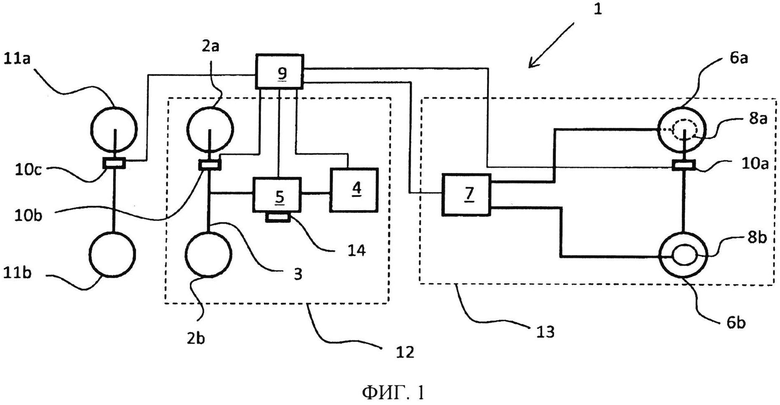
1. Способ управления системой (1) тяги транспортного средства, содержащей
первое ведущее колесо (2а), входящее в состав первой движительной системы (12), включающей механический привод, содержащий двигатель (4) внутреннего сгорания, обеспечивающий тяговое усилие, передаваемое на первое ведущее колесо (2а) через коробку (5) передач;
второе ведущее колесо (6а), входящее в состав второй движительной системы (13), содержащей гидравлический насос (7) для привода гидравлического двигателя (8а), обеспечивающего тяговое усилие, передаваемое на второе ведущее колесо (6а);
по меньшей мере один датчик (10а, 10b, 10с, 14), определяющий состояние трогания с места;
блок (9) управления для управления второй движительной системой (13),
причем способ включает
определение в автоматическом режиме состояния трогания с места с помощью датчика (10а, 10b, 10с, 14) и передачу в блок (9) управления сигнала о достижении состояние трогания с места;
обеспечение в автоматическом режиме тягового усилия от второй движительной системы (13) в ответ на сигнал, указывающий на возникшее состояние трогания с места, и/или сигнал, указывающий, что первая движительная система обеспечивает или будет обеспечивать тяговое усилие;
управление в ручном режиме крутящим моментом от первой движительной системы (12);
управление в автоматическом режиме второй движительной системой (13) с помощью блока (9) управления;
причем вторая движительная система (13) содержит два гидравлических двигателя (8а, 8b) колес, соединенных параллельно и установленных на соответствующих передних управляемых колесах (6а, 6b).
2. Способ по п. 1, отличающийся тем, что управление крутящим моментом, создаваемым второй движительной системой (13), осуществляют в
зависимости от крутящего момента, создаваемого первой движительной системой (12) при трогании с места.
3. Способ по любому из предыдущих пунктов, отличающийся тем, что управление крутящим моментом, создаваемым второй движительной системой (13) при трогании с места, осуществляют в зависимости по меньшей мере от одного из следующих параметров: нагрузка на втором ведущем колесе (6а), коэффициент трения между несущей поверхностью и вторым ведущим колесом (6а), максимально допустимое проскальзывание второго ведущего колеса (6а) и угол поворота второго ведущего колеса (6а).
4. Способ по п. 1 или 2, отличающийся тем, что сигнал, указывающий, что первая движительная система обеспечивает или будет обеспечивать тяговое усилие, содержит включение муфты сцепления, обеспечивающей передачу крутящего момента между двигателем (4) внутреннего сгорания и коробкой передач (5).
5. Способ по п. 1 или 2, отличающийся тем, что сигнал, указывающий, что первая движительная система обеспечивает или будет обеспечивать тяговое усилие, содержит переключение коробки передач (5) из нейтрального положения на передачу переднего или заднего хода, когда транспортное средство неподвижно.
6. Способ по п. 1 или 2, отличающийся тем, что сигнал, указывающий, что первая движительная система обеспечивает или будет обеспечивать тяговое усилие, содержит ускорение транспортного средства из неподвижного состояния.
7. Способ по п. 1 или 2, отличающийся тем, что существует фиксированный минимальный крутящий момент, создаваемый второй движительной системой, когда автоматическая система помощи при трогании с места включена, и этот крутящий момент обеспечивается, пока крутящий момент на ведущих колесах с механическим приводом не превышает заданную пороговую величину, после чего крутящий момент, создаваемый второй движительной системой, будет увеличиваться прямо пропорционально крутящему моменту, создаваемому первой движительной системой.
8. Способ по п. 1 или 2, отличающийся тем, что крутящий момент, создаваемый второй движительной системой, будет поддерживаться лишь до тех пор, пока скорость транспортного средства не превысит заданную пороговую величину.
9. Способ по п. 1 или 2, отличающийся тем, что система управления приводом содержит датчики величин, связанных с тяговым усилием одного или нескольких колес, в частности датчики скорости вращения отдельных колес и датчик скорости транспортного средства, так что определяется тяга, создаваемая колесами, и может быть обнаружено их проскальзывание, и управление запрограммировано для уменьшения крутящего момента, воздействующего на поверхность от колес(а), соединенных со второй, гидравлической, движительной системой, если обнаружено проскальзывание гидравлически приводимых колес.
10. Способ по п. 1 или 2, отличающийся тем, что гидравлический насос (7) в гидравлической движительной системе (13) представляет собой реверсивный насос с переменным рабочим объемом.
11. Система (1) тяги транспортного средства, содержащая
первое ведущее колесо (2а), входящее в состав первой движительной системы (12), включающей механический привод, содержащий двигатель (4) внутреннего сгорания, обеспечивающий тяговое усилие, передаваемое на ведущее колесо (2а) через коробку (5) передач;
второе ведущее колесо (6а), входящее в состав второй движительной системы (13), содержащей гидравлический насос (7) для привода гидравлического двигателя (8а), обеспечивающего тяговое усилие, передаваемое на второе ведущее колесо (6а);
по меньшей мере один датчик (10а, 10b, 10с, 14), обеспечивающий определение состояния трогания с места;
блок (9) управления для управления второй движительной системой (13), запрограммированный с возможностью:
определения в автоматическом режиме состояния трогания с места с помощью датчика (10а, 10b, 10с, 14) и передачу в блок (9) управления сигнала о достижении состояния трогания с места;
обеспечения в автоматическом режиме тягового усилия второй движительной системой (13) в ответ на сигнал, указывающий на возникшее состояние трогания с места, и сигнал, указывающий, что первая движительная система обеспечивает или будет обеспечивать тяговое усилие;
управления посредством блока (9) управления крутящим моментом, создаваемым второй движительной системой (13), в зависимости от крутящего момента, создаваемого первой движительной системой (12), управляемой вручную, причем вторая движительная система (13) содержит два гидравлических двигателя (8а, 8b) колес, соединенных параллельно и установленных на соответствующих передних управляемых колесах (6а, 6b).
12. Система (1) по п. 11, отличающаяся тем, что гидравлический насос (7) присоединен к выходному валу двигателя (4) внутреннего сгорания.
13. Система (1) по п. 11 или 12, отличающаяся тем, что гидравлический насос (7) подсоединен к двум гидравлическим двигателям (8а, 8b), установленным на соответствующих ведущих колесах (6а, 6b) и соединенным параллельно.
14. Тяжелое транспортное средство, такое как грузовой автомобиль или автобус, отличающееся тем, что оно содержит систему (1) тяги по любому из пп. 11-13.
| FR 2859671 A1, 18.03.2005 | |||
| US 2006197375 A1, 07.09.2006 | |||
| РАСПРЕДЕЛИТЕЛЬНЫЙ КРАН ДЛЯ ГАЗОВОГО ХРОМАТОГРАФА | 1966 |
|
SU224144A2 |
| FR 2954255 A1, 24.06.2011 | |||
| Хонинговальная головка для предварительного и окончательного хонингования | 1977 |
|
SU638454A2 |

