ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к определению того, находится или нет мобильное устройство рядом с базовым блоком, и в частности, к определению близости с точки зрения расстояния и/или качества акустики между мобильным устройством и базовым блоком с использованием акустических сигналов.
УРОВЕНЬ ТЕХНИКИ
Персональная система экстренного реагирования (PERS) содержит базовый блок, который, как правило, находится в доме пользователя и содержит, по меньшей мере, микрофон и динамик. Базовый блок подключается к станции дистанционного мониторинга через сеть связи (например, сеть мобильной связи или PSTN), которая дает возможность пользователю контактировать с медицинским работником или службой экстренной помощи, если им требуется помощь.
Мобильная PERS (MPERS) также имеет небольшое мобильное или портативное устройство (например, в форме мобильного телефона, наручных часов или брелока), которое носится или переносится пользователем. Мобильное устройство имеет соответствующий микрофон и динамик и подключается в беспроводном режиме к базовому блоку. Пользователь может использовать мобильное устройство, чтобы обмениваться данными со станцией дистанционного мониторинга через базовый блок. Мобильное устройство также может содержать один или более датчиков для мониторинга состояния или здоровья пользователя (например, акселерометры для определения падений пользователем). Мобильное устройство также может содержать экстренную или аварийную кнопку, которую пользователь может использовать для того, чтобы быстро контактировать со станцией дистанционного мониторинга.
Документ US 2010/0311388 описывает систему, содержащую портативное устройство, имеющее модуль сотового приемо-передающего устройства, GPS-модуль и кнопку экстренного вызова, и базовую станцию, которая обменивается данными с центром реагирования. Пользователь также имеет носимый брелок, имеющий аварийную кнопку, и, когда аварийная кнопка активируется, выводится сигнал в портативное устройство. Если портативное устройство не находится рядом с базовой станцией, что определяется на основе RF-сигналов, портативное устройство контактирует с центром реагирования в ответ на активацию аварийной кнопки. Если портативное устройство находится рядом с базовой станцией, базовая станция принимает сигнал и обменивается данными с центром реагирования. В то время, когда портативное устройство находится рядом с базовой станцией, GPS-модуль выключается, и сота переходит в режим ожидания.
Таким образом, в этой системе мощность, потребляемая портативным устройством, может быть уменьшена, когда оно находится в непосредственной близости к базовой станции. Тем не менее, желательно иметь возможность дополнительно уменьшать потребляемую мощность мобильного устройства в этом типе системы. Это, в частности, имеет место в ходе экстренного вызова, поскольку вызов, возможно, должен поддерживаться со станцией дистанционного мониторинга в течение некоторого времени.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Один аспект изобретения предоставляет возможность того, что потребляемая мощность мобильного устройства в этом типе системы может быть уменьшена посредством отключения компонентов в мобильном устройстве, используемых для того, чтобы воспроизводить аудио (например, цифро-аналогового преобразователя, звукоусилителя, громкоговорителя), когда пользователь (и в силу этого мобильное устройство) находится в непосредственной близости к базовому блоку. Аудио или речь для пользователя вместо этого может выводиться из динамика в базовом блоке. Тем не менее, только громкоговоритель и связанные компоненты в мобильном устройстве должны отключаться, если пользователь находится достаточно близко к базовому блоку, чтобы иметь возможность слышать и понимать речь, передаваемую по громкоговорителю в базовом блоке.
Таким образом, не следует использовать традиционные способы на основе RF-сигналов для определения близости пользователя и мобильного устройства к базовому блоку, поскольку эти способы могут определять то, что пользователь и мобильное устройство находятся рядом с базовым блоком (например, на основе интенсивности принимаемых RF-сигналов или триангуляции посредством дополнительной точки доступа), даже если пользователь может не иметь возможность четко слышать и понимать речь из базового блока (например, пользователь и мобильное устройство могут находиться в смежном или другом помещении относительно базового блока, с закрытой межкомнатной дверью).
Следовательно, существует потребность в альтернативном подходе для определения близости мобильного устройства (и пользователя) к базовому блоку, чтобы давать возможность отключения громкоговорителя мобильного устройства в ходе связи при обеспечении того, что пользователь может слышать и воспринимать речь из динамика в базовом блоке.
Таким образом, изобретение предоставляет возможность того, что близость мобильного устройства к базовому блоку определяется посредством оценки расстояния или качества акустики между мобильным устройством и базовым блоком. В конкретных вариантах осуществления, качество акустики оценивается с точки зрения качества речи пользователя, принимаемой в базовом блоке, и/или качества звука, принимаемого в мобильном устройстве из динамика базового блока.
Различные варианты осуществления изобретения определены в следующих утверждениях.
Утверждение 1. Способ определения расстояния и/или качества акустики между мобильным устройством и базовым блоком, при этом способ содержит прием акустического сигнала посредством микрофона в одном из упомянутого мобильного устройства и базового блока; определение корреляции второго сигнала с принимаемым акустическим сигналом; и определение качества акустики и/или расстояния между мобильным устройством и базовым блоком на основе одного или более пиков в результате этапа определения корреляции.
Утверждение 2. Способ согласно утверждению 1, в котором этап определения корреляции содержит определение коэффициентов адаптивного фильтра для удаления второго сигнала из принимаемого акустического сигнала, и в котором результат этапа определения корреляции содержит импульсную характеристику адаптивного фильтра.
Утверждение 3. Способ согласно утверждению 2, дополнительно содержащий этап сглаживания квадрата магнитуды определенных коэффициентов.
Утверждение 4. Способ согласно утверждению 1, 2 или 3, в котором акустический сигнал, принимаемый посредством микрофона в упомянутом одном из упомянутого мобильного устройства и базового блока, принимается из динамика в другом из упомянутого мобильного устройства и базового блока, который выводит акустический сигнал в ответ на управляющий сигнал.
Утверждение 5. Способ согласно утверждению 4, в котором второй сигнал соответствует сигналу, используемому для того, чтобы управлять динамиком в упомянутом другом из упомянутого мобильного устройства и базового блока, чтобы выводить акустический сигнал.
Утверждение 6. Способ согласно утверждению 4, причем способ дополнительно содержит этап приема акустического сигнала в микрофоне в упомянутом другом из упомянутого мобильного устройства и базового блока.
Утверждение 7. Способ согласно утверждению 6, в котором второй сигнал соответствует акустическому сигналу, принимаемому в упомянутом другом из упомянутого мобильного устройства и базового блока.
Утверждение 8. Способ согласно любому из утверждений 4-7, в котором этап определения качества акустики и/или расстояния между мобильным устройством и базовым блоком содержит определение одного пика в результате этапа определения.
Утверждение 9. Способ согласно утверждению 8, в котором этап определения содержит этап определения расстояния между мобильным устройством и базовым блоком из времени пика, определенного в результате этапа определения.
Утверждение 10. Способ согласно утверждению 8 или 9, в котором этап определения содержит определение качества акустики между мобильным устройством и базовым блоком из (i) дисперсии обнаруженного пика; и/или (ii) времени реверберации около обнаруженного пика.
Утверждение 11. Способ согласно утверждению 4, причем способ дополнительно содержит этап управления динамиком в упомянутом одном из упомянутого мобильного устройства и базового блока, чтобы выводить акустический сигнал; при этом этап приема акустического сигнала посредством микрофона в одном из упомянутого мобильного устройства и базового блока содержит прием акустического сигнала из динамика в упомянутом мобильном устройстве и упомянутом базовом блоке.
Утверждение 12. Способ согласно утверждению 11, в котором этап определения качества акустики и/или расстояния между мобильным устройством и базовым блоком содержит определение первого пика в результате этапа определения, соответствующего акустическому сигналу из динамика в упомянутом одном из упомянутого мобильного устройства и базового блока, и второго пика, соответствующего акустическому сигналу из динамика в упомянутом другом из упомянутого мобильного устройства и базового блока.
Утверждение 13. Способ согласно утверждению 12, в котором этап определения качества акустики и/или расстояния содержит определение расстояния между мобильным устройством и базовым блоком из расстояния между первым и вторым пиками в результате этапа определения.
Утверждение 14. Способ согласно утверждению 12 или 13, в котором этап определения качества акустики и/или расстояния содержит определение качества акустики между мобильным устройством и базовым блоком из (i) соотношения магнитуд (абсолютных величин) обнаруженных пиков; (ii) дисперсии около второго пика; и/или (iii) времени реверберации около второго пика.
Утверждение 15. Способ согласно любому из утверждений 11-14, в котором второй сигнал соответствует сигналу, используемому для того, чтобы управлять динамиком в упомянутом другом из упомянутого мобильного устройства и базового блока, чтобы выводить акустический сигнал.
Утверждение 16. Способ согласно любому из утверждений 4-15, в котором управляющий сигнал, используемый для того, чтобы управлять динамиком в упомянутом другом из упомянутого мобильного устройства и базового блока, содержит речевой сигнал, принимаемый из станции дистанционного мониторинга.
Утверждение 17. Способ согласно любому из утверждений 4-15, в котором управляющий сигнал, используемый для того, чтобы управлять динамиком в упомянутом другом из упомянутого мобильного устройства и базового блока, содержит сигнал, извлеченный из аудиофайла, сохраненного локально в упомянутом мобильном устройстве и/или упомянутом базовом блоке.
Утверждение 18. Способ согласно утверждению 17, в котором динамик в другом из упомянутого мобильного устройства и базового блока, который выводит акустический сигнал в ответ на управляющий сигнал, извлеченный из аудиофайла, активируется в ответ на сигнал триггера, отправленный из упомянутого одного из мобильного устройства и базового блока.
Утверждение 19. Способ согласно утверждению 1, 2 или 3, в котором этап приема акустического сигнала содержит прием акустического сигнала посредством микрофона в базовом блоке, причем способ дополнительно содержит этап приема акустического сигнала посредством микрофона в мобильном устройстве, при этом акустический сигнал, принимаемый посредством микрофона в мобильном устройстве, используется в качестве второго сигнала на этапе определения корреляции второго сигнала с принимаемым акустическим сигналом.
Утверждение 20. Способ согласно утверждению 19, в котором акустический сигнал, принимаемый посредством микрофонов в мобильном устройстве и базовом блоке, является речью пользователя мобильного устройства.
Утверждение 21. Способ согласно утверждению 19 или 20, в котором этап определения качества акустики и/или расстояния между мобильным устройством и базовым блоком содержит определение одного пика в результате этапа определения.
Утверждение 22. Способ согласно утверждению 21, в котором этап определения содержит этап определения расстояния между мобильным устройством и базовым блоком из времени пика, определенного в результате этапа определения.
Утверждение 23. Способ согласно утверждению 21 или 22, в котором этап определения содержит определение качества акустики между мобильным устройством и базовым блоком из (i) дисперсии около обнаруженного пика; и/или (ii) времени реверберации около обнаруженного пика.
Утверждение 24. Способ уменьшения потребляемой мощности мобильного устройства, при этом способ содержит определение расстояния и/или качества акустики между мобильным устройством и базовым блоком согласно способу согласно любому из указаний 1-23; и деактивацию динамика мобильного устройства, если определено то, что мобильное устройство находится ближе порогового расстояния к базовому блоку, или качество акустики превышает пороговое значение.
Утверждение 25. Система, содержащая:
- мобильное устройство; базовый блок; и процессор; при этом мобильное устройство и базовый блок содержат микрофон для приема акустического сигнала; при этом процессор выполнен с возможностью определять корреляцию второго сигнала с принимаемым акустическим сигналом; и определять качество акустики и/или расстояние между мобильным устройством и базовым блоком на основе одного или более пиков в результате этапа определения.
Утверждение 26. Система согласно утверждению 25, в которой процессор выполнен с возможностью определять корреляцию посредством определения коэффициентов адаптивного фильтра для удаления второго сигнала из принимаемого акустического сигнала, при этом результат этапа определения корреляции содержит импульсную характеристику адаптивного фильтра.
Утверждение 27. Система согласно утверждению 26, в которой процессор дополнительно выполнен с возможностью сглаживать квадрат магнитуды определенных коэффициентов.
Утверждение 28. Система согласно утверждению 25, 26 или 27, в которой другое из упомянутого мобильного устройства и базового блока содержит динамик для вывода акустического сигнала в ответ на управляющий сигнал.
Утверждение 29. Система согласно утверждению 28, в которой второй сигнал соответствует сигналу, используемому для того, чтобы управлять динамиком в упомянутом другом из упомянутого мобильного устройства и базового блока, чтобы выводить акустический сигнал.
Утверждение 30. Система согласно утверждению 28, в которой другое из упомянутого мобильного устройства и базового блока содержит микрофон для приема акустического сигнала.
Утверждение 31. Система согласно утверждению 30, в которой второй сигнал соответствует акустическому сигналу, принимаемому посредством микрофона в упомянутом другом из упомянутого мобильного устройства и базового блока.
Утверждение 32. Система согласно любому из утверждений 25-31, в которой процессор выполнен с возможностью определять качество акустики и/или расстояние между мобильным устройством и базовым блоком посредством определения одного пика в результате корреляции.
Утверждение 33. Система согласно утверждению 32, в которой процессор выполнен с возможностью определять расстояние между мобильным устройством и базовым блоком из времени пика, определенного в результате корреляции.
Утверждение 34. Система согласно утверждению 32 или 33, в которой процессор выполнен с возможностью определять качество акустики между мобильным устройством и базовым блоком из (i) дисперсии около обнаруженного пика; и/или (ii) времени реверберации около обнаруженного пика.
Утверждение 35. Система согласно утверждению 25, в которой упомянутое одно из упомянутого мобильного устройства и базового блока дополнительно содержит динамик для вывода акустического сигнала, при этом микрофон в упомянутом одном из упомянутого мобильного устройства и базового блока принимает акустический сигнал из динамиков в упомянутом мобильном устройстве и упомянутом базовом блоке.
Утверждение 36. Система согласно утверждению 35, в которой процессор выполнен с возможностью определять качество акустики и/или расстояние между мобильным устройством и базовым блоком посредством определения первого пика в результате корреляции, соответствующего акустическому сигналу из динамика в упомянутом одном из упомянутого мобильного устройства и базового блока, и второго пика, соответствующего акустическому сигналу из динамика в упомянутом другом из упомянутого мобильного устройства и базового блока.
Утверждение 37. Система согласно утверждению 36, в которой процессор выполнен с возможностью определять качество акустики и/или расстояние посредством определения расстояния между мобильным устройством и базовым блоком из расстояния между первым и вторым пиками.
Утверждение 38. Система согласно утверждению 36 или 37, в которой процессор выполнен с возможностью определять качество акустики и/или расстояние посредством определения качества акустики между мобильным устройством и базовым блоком из (i) соотношения магнитуд обнаруженных пиков; (ii) дисперсии около второго пика; и/или (iii) времени реверберации около второго пика.
Утверждение 39. Система согласно любому из утверждений 35-38, в которой второй сигнал соответствует сигналу, используемому для того, чтобы управлять динамиком в упомянутом другом из упомянутого мобильного устройства и базового блока, чтобы выводить акустический сигнал.
Утверждение 40. Система согласно любому из утверждений 27-39, в которой управляющий сигнал, используемый для того, чтобы управлять динамиком в упомянутом другом из упомянутого мобильного устройства и базового блока, содержит речевой сигнал, принимаемый из станции дистанционного мониторинга.
Утверждение 41. Система согласно любому из утверждений 27-39, в которой управляющий сигнал, используемый для того, чтобы управлять динамиком в упомянутом другом из упомянутого мобильного устройства и базового блока, содержит сигнал, извлеченный из аудиофайла, сохраненного локально в упомянутом мобильном устройстве и/или упомянутом базовом блоке.
Утверждение 42. Система согласно утверждению 41, в которой динамик в другом из упомянутого мобильного устройства и базового блока, который выводит акустический сигнал в ответ на управляющий сигнал, извлеченный из аудиофайла, выполнен с возможностью активации в ответ на сигнал триггера, отправленный из упомянутого одного из мобильного устройства и базового блока.
Утверждение 43. Система согласно утверждению 25, 26 или 27, в которой каждое из мобильного устройства и базового блока содержит микрофон для приема акустического сигнала, при этом процессор выполнен с возможностью использовать акустический сигнал, принимаемый посредством микрофона в мобильном устройстве, в качестве второго сигнала при определении корреляции второго сигнала с принимаемым акустическим сигналом.
Утверждение 44. Система согласно утверждению 43, в которой акустический сигнал, принимаемый посредством микрофонов в мобильном устройстве и базовом блоке, является речью пользователя мобильного устройства.
Утверждение 45. Система согласно утверждению 43 или 44, в которой процессор выполнен с возможностью определять качество акустики и/или расстояние между мобильным устройством и базовым блоком посредством определения одного пика в результате корреляции.
Утверждение 46. Система согласно утверждению 45, в которой процессор выполнен с возможностью определять расстояние между мобильным устройством и базовым блоком из времени пика, определенного в результате корреляции.
Утверждение 47. Система согласно утверждению 45 или 46, в которой процессор выполнен с возможностью определять качество акустики между мобильным устройством и базовым блоком из (i) дисперсии около обнаруженного пика; и/или (ii) времени реверберации около обнаруженного пика.
Утверждение 48. Система согласно любому из утверждений 25-47, в которой мобильное устройство содержит динамик, при этом мобильное устройство выполнено с возможностью деактивировать динамик, если определено то, что мобильное устройство находится ближе порогового расстояния к базовому блоку, или качество акустики превышает пороговое значение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее описываются варианты осуществления изобретения, только в качестве примера, со ссылкой на прилагаемые чертежи, из которых:
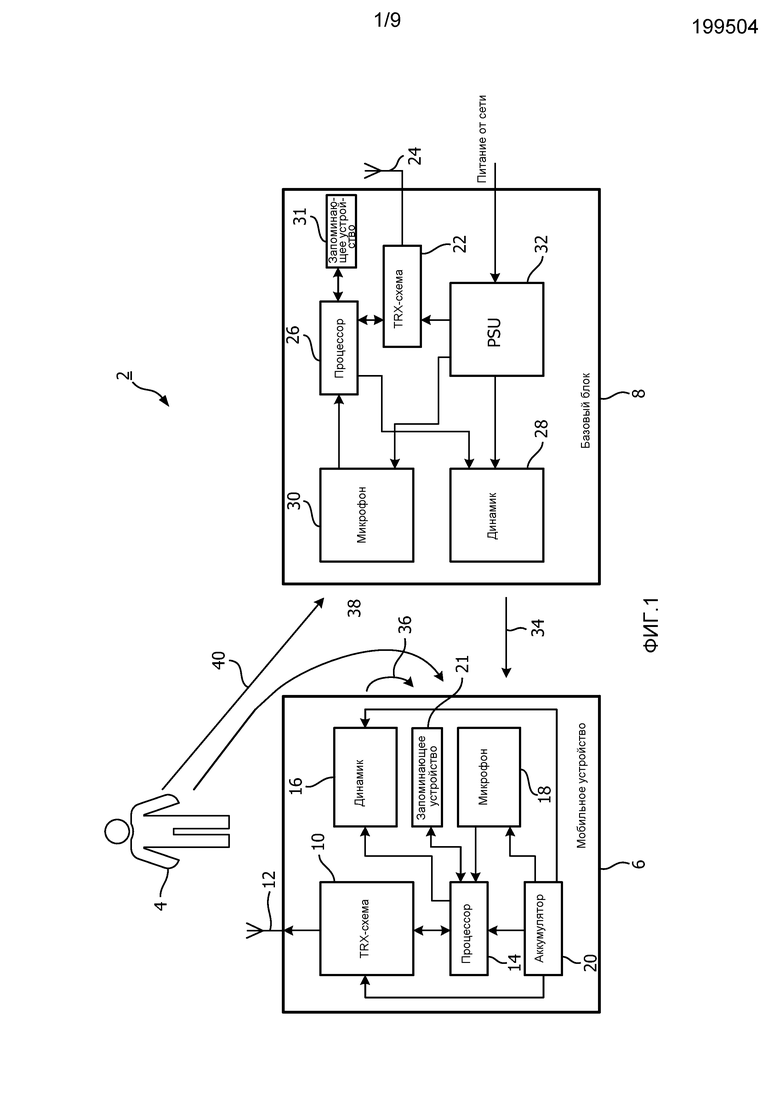
Фиг. 1 является блок-схемой мобильного устройства и базового блока в соответствии с изобретением;
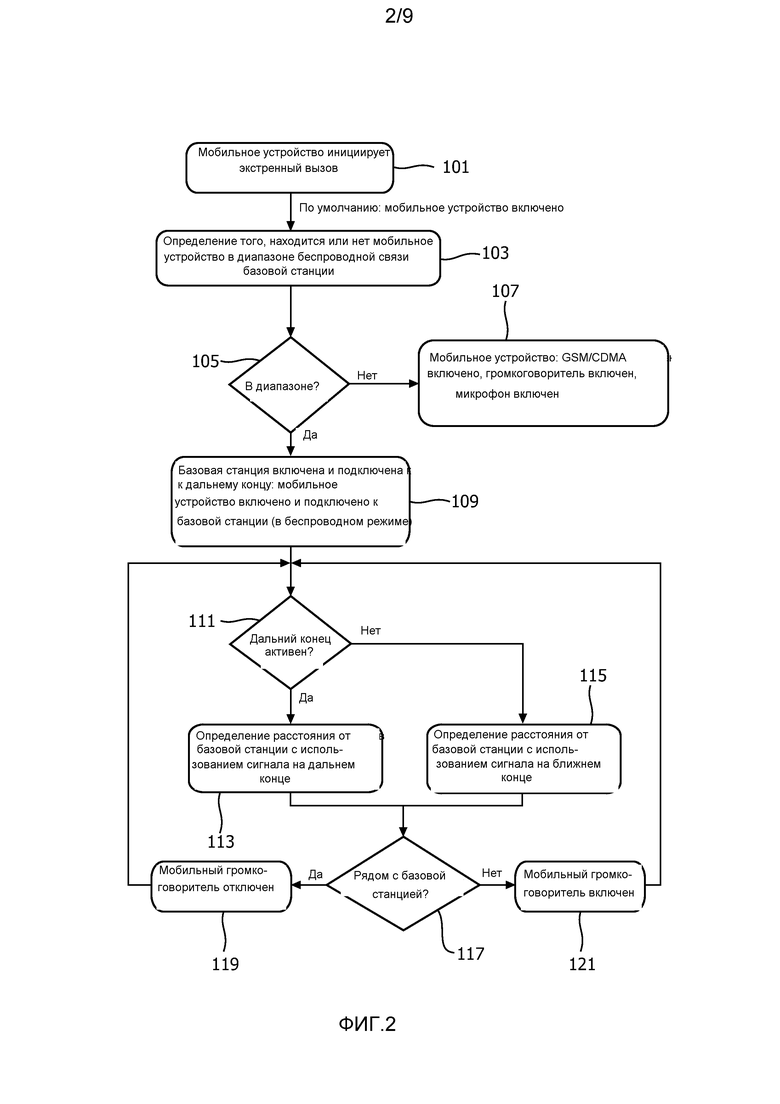
Фиг. 2 является блок-схемой последовательности операций, иллюстрирующей способ работы мобильного устройства в ходе звонка в станцию дистанционного мониторинга;
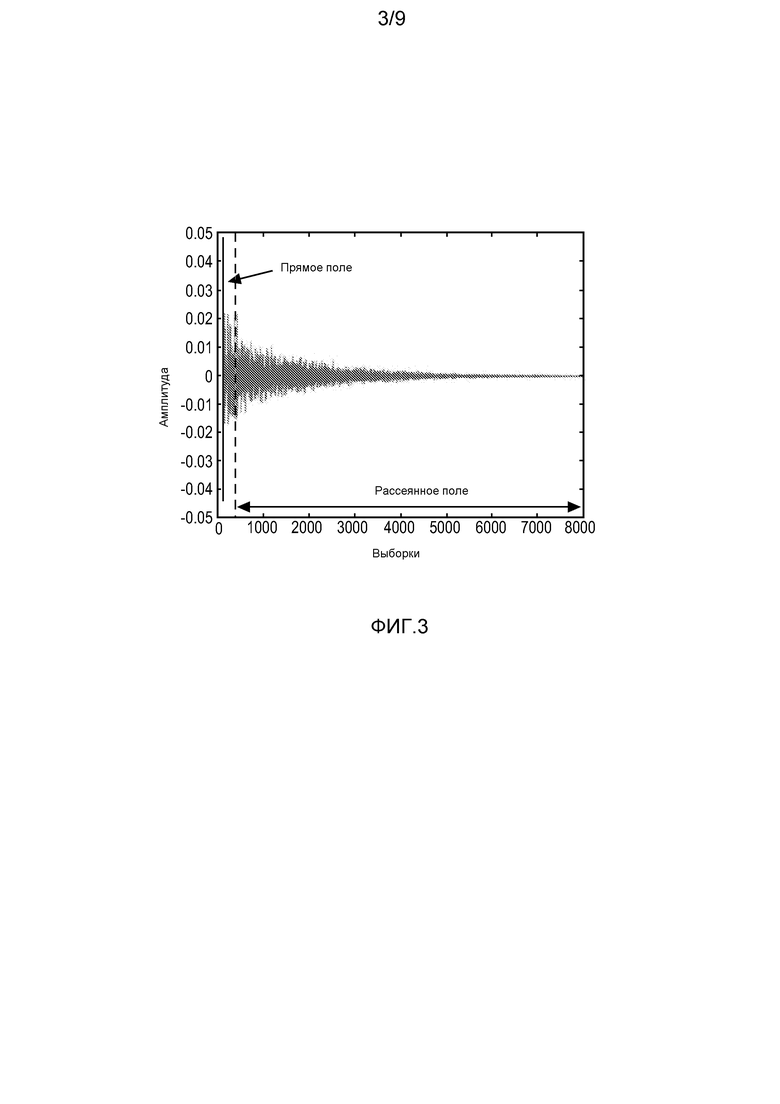
Фиг. 3 является графиком, иллюстрирующим акустическую импульсную характеристику в помещении, показывающим прямые и рассеянные поля;
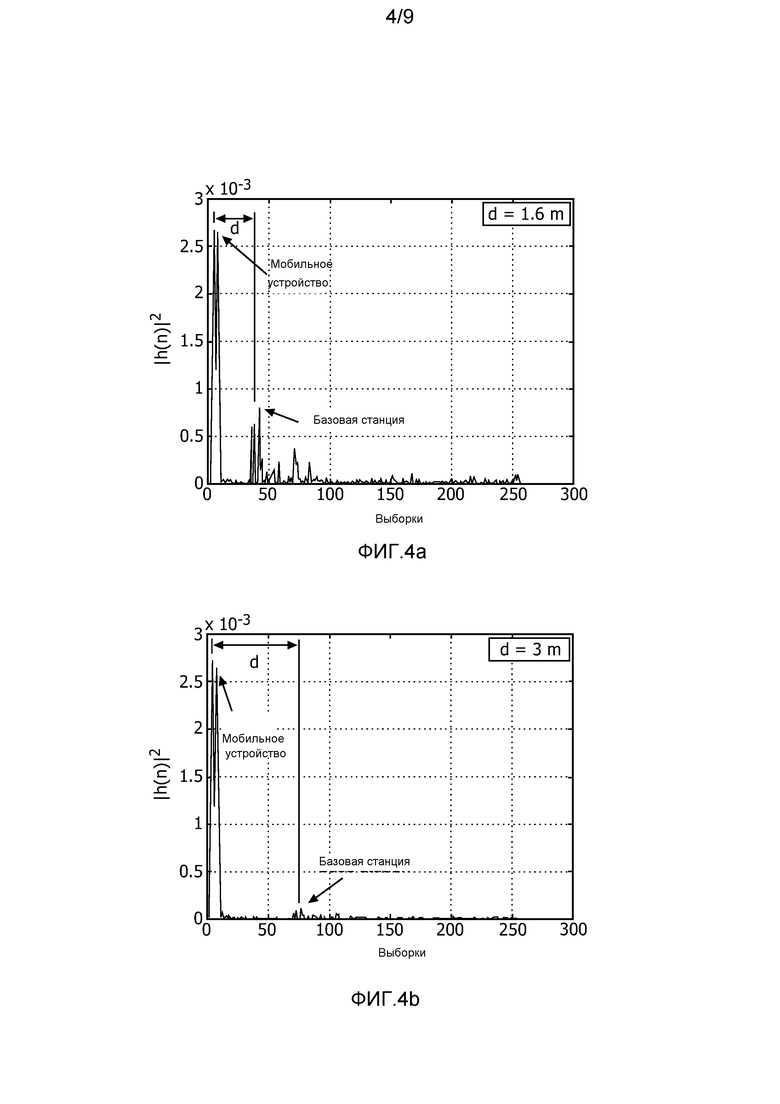
Фиг. 4a-b показывает импульсную характеристику адаптивного фильтра для пользователя, находящегося на двух различных расстояниях от базового блока;
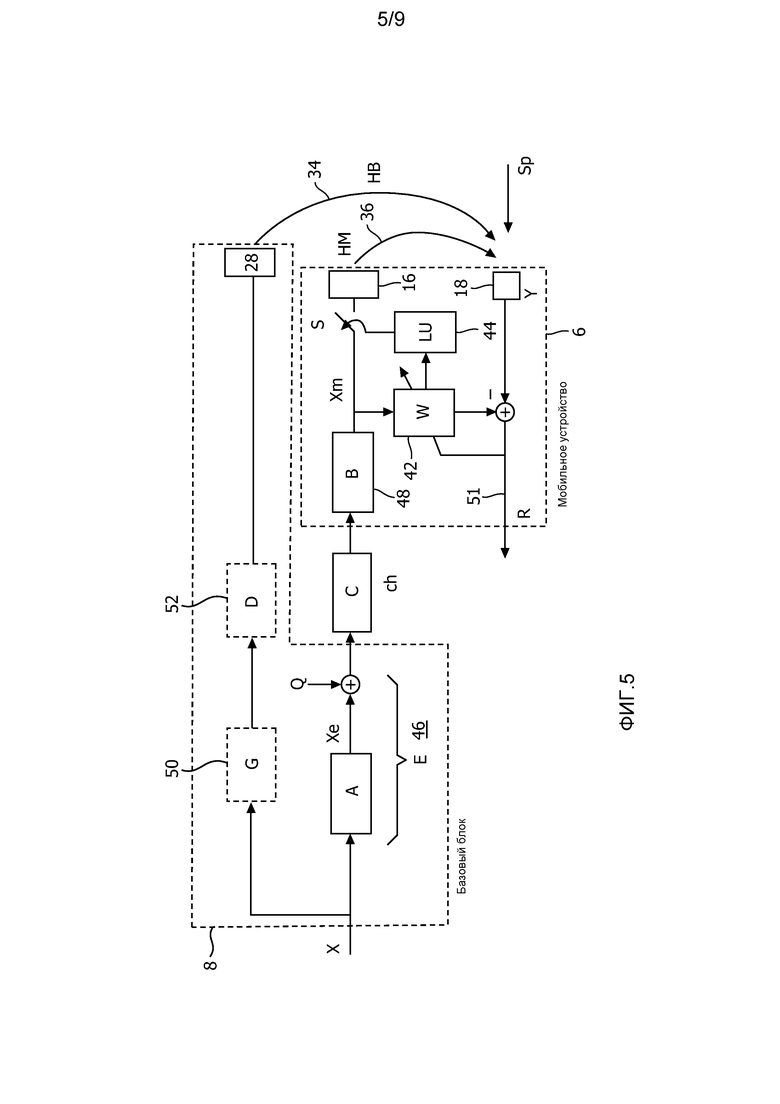
Фиг. 5 является схемой, иллюстрирующей обработку, выполняемую в первом варианте осуществления изобретения;
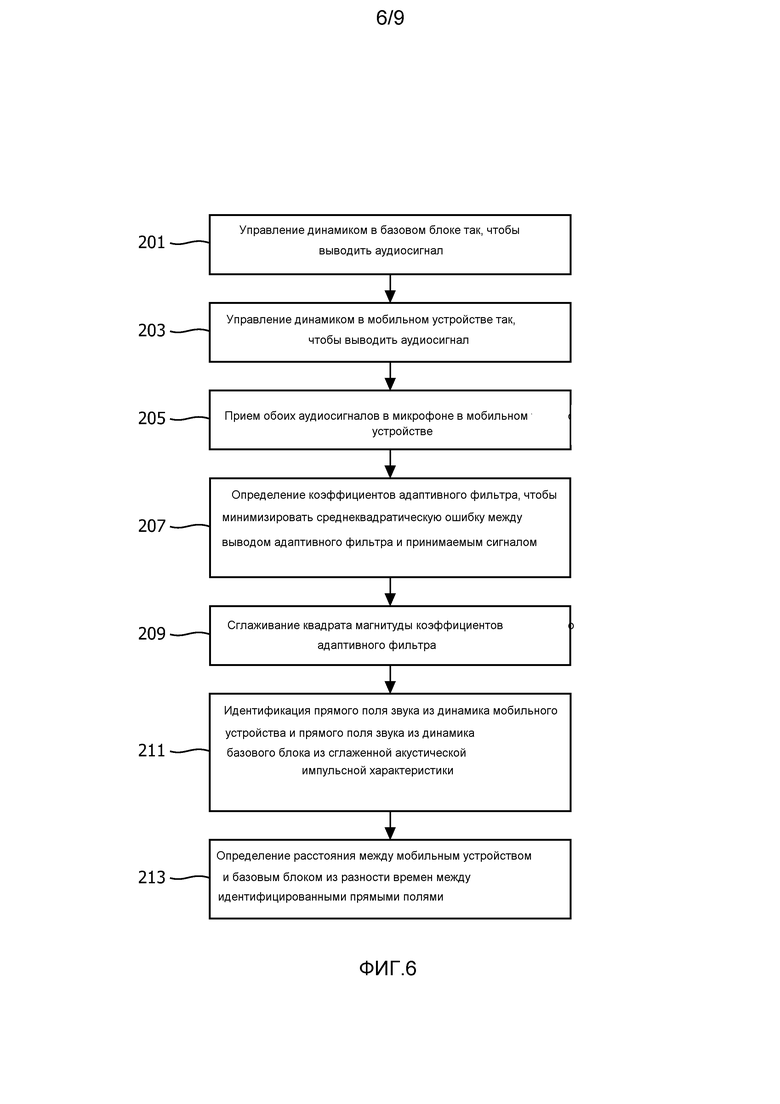
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей этапы обработки, выполняемые в первом варианте осуществления;
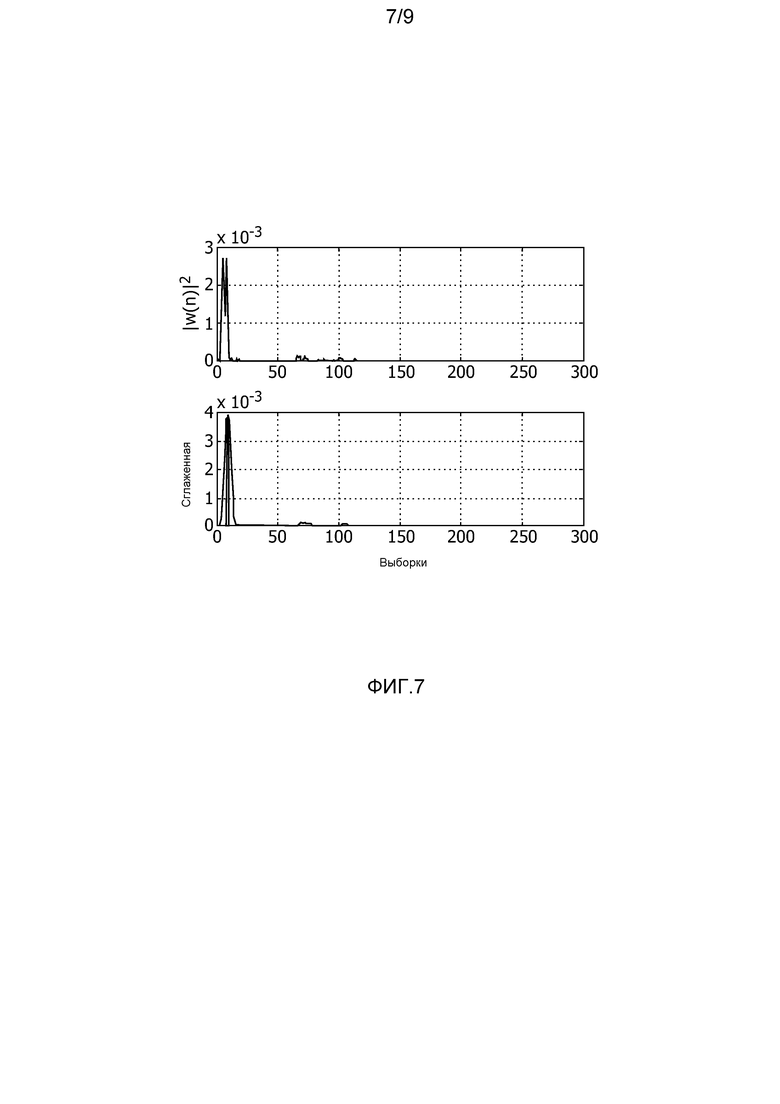
Фиг. 7 является графиком, иллюстрирующим квадрат магнитуды импульсной характеристики адаптивного фильтра и соответствующей сглаженной характеристики;
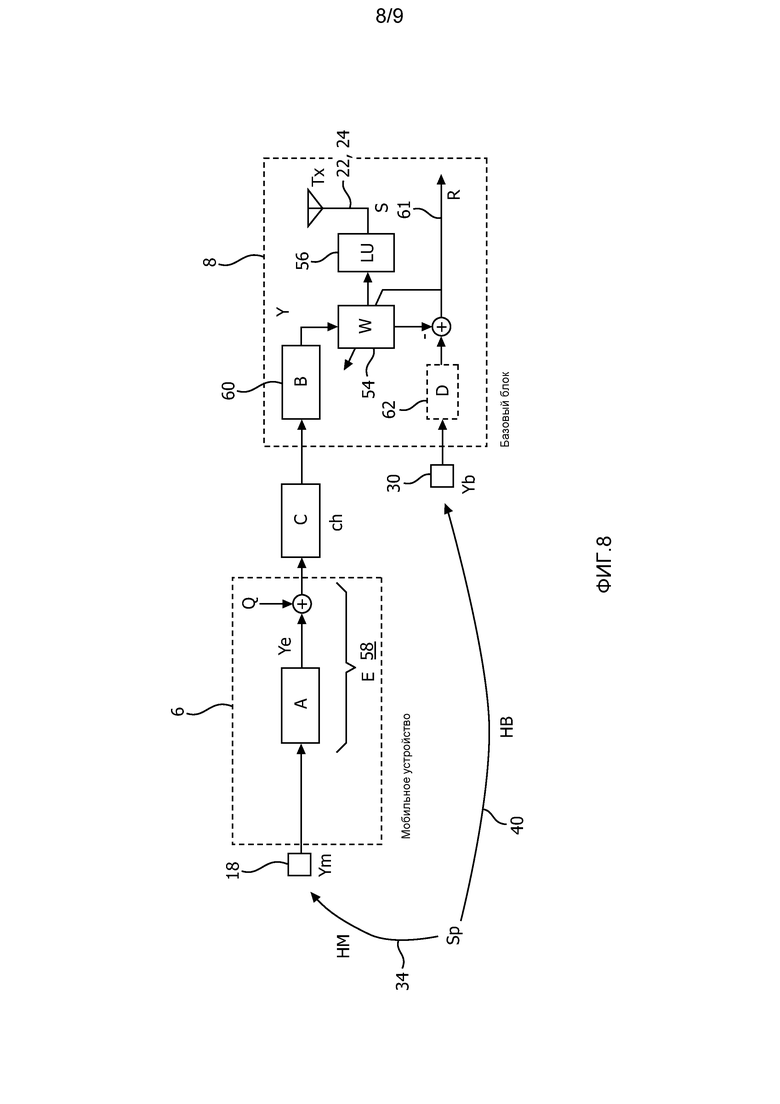
Фиг. 8 является схемой, иллюстрирующей обработку, выполняемую во втором варианте осуществления изобретения; и
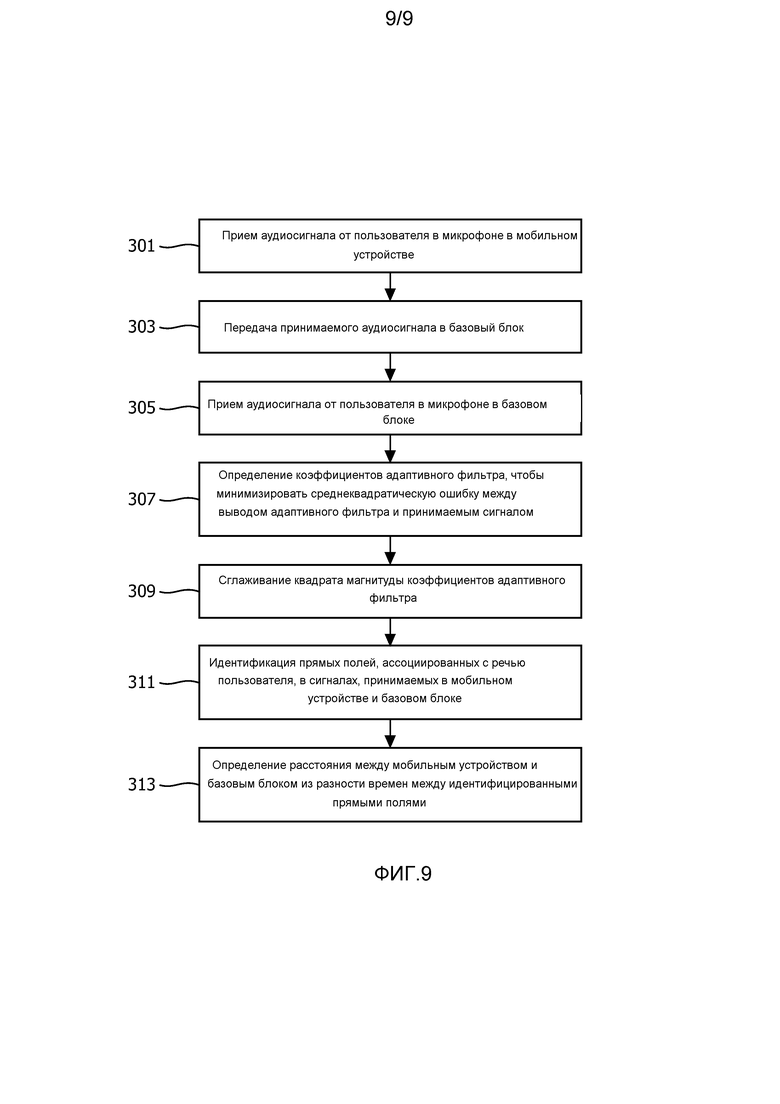
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей этапы обработки, выполняемые во втором варианте осуществления
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Хотя изобретение описано ниже как применяемое к мобильной персональной системе экстренного реагирования (MPERS), следует принимать во внимание, что способы определения близости мобильного устройства к базовому блоку могут применяться к другим типам систем.
Кроме того, хотя изобретение описывается как предназначенное для определения того, можно или нет экономить энергопотребление в мобильном устройстве посредством отключения динамика (и ассоциированных компонентов), следует принимать во внимание, что результат определения близости может использоваться для многих других целей, таких как выполнение передач обслуживания выполняющегося вызова между блоками связи из набора распределенных блоков в доме, или автоматическое регулирование усиления усилителя в базовом блоке.
Часть MPERS 2 для пользователя 4, в которой может быть реализовано изобретение, показана на фиг 1. MPERS 2 содержит мобильное устройство 6 и базовый блок 8.
Мобильное устройство 6 может принимать любую надлежащую форму, например, брелока, который носится вокруг шеи пользователя, наручных часов, мобильного телефона, PDA и т.д., и находится, в общем, в непосредственной близости к пользователю 4. Мобильное устройство 6 содержит схему 10 приемо-передающего устройства и ассоциированную антенну 12 для обмена данными с базовым блоком 8. Схема 10 приемо-передающего устройства может быть выполнена с возможностью использовать любой надлежащий протокол связи, включающий в себя, например, технологию Bluetooth или DECT. Помимо этого, схема 10 приемо-передающего устройства может быть выполнена с возможностью использовать протокол мобильной связи, например, GSM или CDMA, так что мобильное устройство 6 может непосредственно контактировать со станцией дистанционного мониторинга, если мобильное устройство 6 не находится в диапазоне базового блока 8 (например, если пользователь 4 находится вне дома).
Мобильное устройство 6 также содержит процессор 14, динамик 16 и микрофон 18. Процессор 14 управляет работой мобильного устройства 6. Динамик 16 предоставляется, чтобы выводить аудио (обычно речь), принимаемое из станции дистанционного мониторинга через базовый блок 8 (при условии, что мобильное устройство 6 находится в диапазоне базового блока 8). На Фиг. 1, блок 16 также представляет другие компоненты, ассоциированные с динамиком 16, например, цифро-аналоговый преобразователь и звукоусилитель.
Микрофон 18 определяет аудио (так же, обычно речь) от пользователя 4 и преобразует аудио в электрический сигнал для передачи в станцию дистанционного мониторинга (так же, через базовый блок 8, если мобильное устройство 6 находится в диапазоне).
Мобильное устройство 6 также содержит аккумулятор 20 или другой надлежащий источник питания, который подает питание в различные компоненты мобильного устройства 6. Процессор 14 может быть выполнен с возможностью управлять тем, в какой из компонентов (например, из схемы 10 приемо-передающего устройства, динамика 16 и микрофона 18) подается питание посредством аккумулятора 20 в любое конкретное время.
В некоторых вариантах осуществления, мобильное устройство 6 может включать в себя запоминающее устройство 21, которое сохраняет предварительно записанные аудиофайлы для воспроизведения посредством динамика 16 мобильного устройства 6. Эти аудиофайлы могут выводиться в чрезвычайной ситуации, если питание подается в динамик 16, например, чтобы сообщать пользователю 4 то, что устанавливается соединение со станцией дистанционного мониторинга.
Базовый блок 8 содержит схему 22 приемо-передающего устройства и ассоциированную антенну 24 для обмена данными с мобильным устройством 6. Аналогично мобильному устройству 6, схема 22 приемо-передающего устройства в базовом блоке 8 может быть выполнена с возможностью использовать любой надлежащий протокол связи, включающий в себя, например, технологию Bluetooth или DECT. Помимо этого, схема 22 приемо-передающего устройства может быть выполнена с возможностью использовать протокол мобильной связи, например, GSM или CDMA, для предоставления возможности базовому блоку 8 контактировать со станцией дистанционного мониторинга. Альтернативно или помимо этого, схема 22 приемо-передающего устройства может быть выполнена с возможностью подключаться к коммутируемой телефонной сети общего пользования (PSTN) через настенную розетку в доме пользователя.
Базовый блок 8 также содержит процессор 26, динамик 28 и микрофон 30. Процессор 26 управляет работой базового блока 8. Динамик 28 предоставляется, чтобы выводить аудио (обычно речь), принимаемое из станции дистанционного мониторинга. В некоторых вариантах осуществления, базовый блок 8 содержит запоминающее устройство 31, которое включает в себя предварительно записанные аудиофайлы, идентичные аудиофайлам, сохраненным в запоминающем устройстве 21 мобильного устройства 6, для автоматического воспроизведения в ходе экстренного вызова.
Микрофон 30 определяет аудио (так же, обычно речь) от пользователя 4 и преобразует аудио в электрический сигнал для передачи в станцию дистанционного мониторинга.
Базовый блок 8 также содержит блок питания, PSU 32, который подключается к сетевому источнику питания в доме пользователя и подает питание в различные компоненты базового блока 8. PSU 32 также может включать в себя аккумулятор или другой надлежащий источник питания, чтобы выступать в качестве запасного источника питания в случае, если возникает прерывание питания от сети, либо питание от сети сбоит каким-либо другим способом.
Как описано выше, изобретение предоставляет способ адаптивного определения расстояния пользователя 4 от базового блока 8 в реальном времени, основанный исключительно на акустических измерениях. Таким образом, если пользователь 4 считается расположенным в непосредственной близости к базовому блоку 8, то динамик 16 в мобильном устройстве 6 может отключаться, и аудио может выводиться только посредством динамика 28 в базовом блоке 8 вместо этого. Тем не менее, если пользователь 4 находится слишком далеко от базового блока 8, чтобы четко слышать и понимать звук из динамика 28 в базовом блоке 8, то динамик 28 в мобильном устройстве 6 может быть включен в ходе экстренного вызова (аналогично, если мобильное устройство 6 находится за пределами диапазона беспроводной связи базового блока 8).
В отличие от способов определения близости на основе радиосвязи (т.е. RF), варианты осуществления изобретения дают возможность измерения качества речевого сигнала, снимаемого посредством базового блока 8, и/или измерения качества речевого сигнала из базового блока 8, принимаемого в мобильном устройстве 6, поскольку они могут учитывать такие эффекты, как реверберация. Например, в случаях, если пользователь 4 (или базовый блок 8) находится за пределами радиуса реверберации (также известного как критически важное расстояние) от источника звука (т.е. пользователя 4 или динамика 28 базового блока), в котором прямые и рассеянные доли источника звука равны по интенсивности, динамик 16 в мобильном устройстве 6 должен быть включен.
Блок-схема последовательности операций, иллюстрирующая способ работы мобильного устройства в ходе звонка в станцию дистанционного мониторинга, показана на фиг 2. На этапе 101, мобильное устройство 6 инициирует звонок в станцию дистанционного мониторинга. Вызов может быть инициирован посредством нажатия пользователем 4 экстренной или другой кнопки на мобильном устройстве 6 или посредством обнаружения посредством одного или более датчиков в мобильном устройстве 6 чрезвычайного происшествия (к примеру, падения пользователем 4).
На этапе 103, мобильное устройство 6 определяет то, находится оно или нет в диапазоне беспроводной связи базового блока 8. Это может быть определено, например, посредством определения посредством мобильного устройства 6 того, может оно или нет принимать сигнал из базового блока 8. Специалисты в данной области техники должны знать альтернативные способы, которыми это может быть определено.
Если мобильное устройство 6 не находится в диапазоне беспроводной связи базового блока 8, мобильное устройство 6 контактирует со станцией дистанционного мониторинга напрямую с использованием ее схемы 10 приемо-передающего устройства и антенны 12. В этом случае, питание подается в схему 10 приемо-передающего устройства, динамик 16 и микрофон 18 в мобильном устройстве 6 (этап 107).
Если мобильное устройство 6 находится в диапазоне беспроводной связи базового блока 8, мобильное устройство 6 в беспроводном режиме подключается к базовому блоку 8, и базовый блок 8 устанавливает вызов со станцией дистанционного мониторинга (этап 109). В этом случае, GSM/CDMA-часть схемы 10 приемо-передающего устройства (которая может быть отдельным модулем относительно модуля, используемого для того, чтобы устанавливать беспроводное соединение с базовым блоком 8) может выключаться.
На этапе 111, определяется то, является или нет пользователь на дальнем конце активным. Пользователь на дальнем конце является человеком или компьютером в системе дистанционного мониторинга (например, центром реагирования), который предоставляет аудио (типично речь) пользователю 4, которое выводится посредством динамика 28 в базовом блоке 8 и динамика 16 в мобильном устройстве 6. Предусмотрено множество способов для определения активности (т.е. речи) пользователя на дальнем конце, к примеру, базовый основанный на мощности способ, который сравнивает мгновенную мощность с некоторыми долговременными оценками минимального уровня шума. Специалисты в данной области техники должны знать альтернативные способы, которыми может быть определена активность на дальнем конце.
Если пользователь на дальнем конце является активным, расстояние между базовым блоком 8 и мобильным устройством 6 определяется с использованием сигнала на дальнем конце, который предпочтительно представляет собой аудио, выводимое посредством динамика 16 и динамика 28, принимаемое посредством микрофона 18 в мобильном устройстве 6, соответственно, проиллюстрированное посредством стрелок 34 и 36 на Фиг. 1. Это представляет собой этап 113 на Фиг. 2.
В качестве альтернативы к использованию сигнала на дальнем конце, расстояние между базовым блоком 8 и мобильным устройством 6 может быть определено с использованием звука из сохраненного аудиофайла, который выводится посредством динамика 16 и динамика 28.
Если пользователь на дальнем конце не является активным (например, если он слушает пользователя 4), или если базовый блок 8 иным образом не формирует звук с динамиком 28, расстояние между базовым блоком 8 и мобильным устройством 6 определяется с использованием сигнала на ближнем конце, который представляет собой аудио (т.е. речь) от пользователя 4, принимаемое посредством микрофона 18 в мобильном устройстве 6 и микрофона 30 в базовом блоке 8, соответственно, проиллюстрированное посредством стрелок 38 и 40 на Фиг. 1. Это представляет собой этап 115 на Фиг. 2. Определение активности пользователя на ближнем конце может быть выполнено аналогично определению для пользователя на дальнем конце, и специалисты в данной области техники должны знать альтернативные способы, которыми может быть определена активность на ближнем конце.
Когда расстояние между мобильным устройством 6 и базовым блоком 8 определено на этапе 113 или 115, определяется то, находится или нет мобильное устройство 6 в акустической близости к базовому блоку 8 (т.е. то, находятся пользователь 4 и мобильное устройство 6 достаточно близко к базовому блоку 8, чтобы пользователь 4 мог четко слышать и понимать речь, выводимую посредством динамика 28 в базовом блоке 8).
Если мобильное устройство 6 находится в акустической близости к базовому блоку 8, динамик 16 в мобильном устройстве 6 может отключаться (этап 119). Если мобильное устройство 6 не находится в акустической близости от базового блока, динамик 16 в мобильном устройстве 6 может включаться (этапе 121).
После этапов 119 и 121 способ может возвращаться к этапу 111 и повторяться.
Альтернативно, измерения сигналов на дальнем конце (или на основе аудиофайлов) и на ближнем конце могут быть выполняться перед использованием результатов обоих измерений для того, чтобы принимать решение относительно того, находится или нет мобильное устройство 6 в акустической близости к базовому блоку 8.
Нижеприведенное описание вариантов осуществления изобретения относится к определению корреляции между двумя сигналами с использованием адаптивной фильтрации. Следует принимать во внимание, что корреляция или подобие между двумя сигналами также может быть определена посредством непосредственного использования взаимно-корреляционной функции. Краткое описание адаптивной фильтрации предоставляется ниже.
Адаптивный фильтр используется для того, чтобы удалять коррелированный сигнал, присутствующий в другом сигнале, и обычно используется для подавления акустического эхо-сигнала. При подавлении акустического эхо-сигнала адаптивный фильтр моделирует линейную часть тракта передачи акустических эхо-сигналов между динамиком устройства и микрофоном таким образом, что (линейный) акустический эхо-сигнал может удаляться из сигнала микрофона, оставляя только требуемый чистый речевой сигнал. Если корректно моделированы, коэффициенты адаптивного фильтра соответствуют тракту передачи акустических эхо-сигналов, как показано на Фиг. 3, и могут быть разделены на прямое поле, которое соответствует прямому соединению между динамиком и микрофоном и некоторыми ранними отражениями, и рассеянное поле, которое соответствует более поздним отражениям и которое способствует реверберации. Фиг. 3 показывает акустическую импульсную характеристику в помещении с высоким временем реверберации (приблизительно 850 мс), показывая прямые и рассеянные поля. Ось Y представляет амплитуду формы сигнала, а ось X показывает дискретные временные выборки для импульсной характеристики, дискретизированные при 8 кГц.
Предусмотрено множество алгоритмов адаптивной фильтрации, к примеру, метод наименьших квадратов (LMS) и нормализованный LMS (NLMS), которые основаны на теории на основе фильтра Винера, и рекурсивный метод наименьших квадратов (RLS) и фильтрация Калмана. В следующих вариантах осуществления, теория на основе фильтра Винера должна быть использована для того, чтобы извлекать оптимальные коэффициенты адаптивной фильтрации.
Верхний график на Фиг. 4 показывает квадрат магнитуды импульсной характеристики адаптивного фильтра для пользователя, находящегося рядом (например, на расстоянии 1,6 м) с приемным устройством (например, базовым блоком 8), а нижний график на Фиг. 4 показывает квадрат магнитуды импульсной характеристики адаптивного фильтра для пользователя, находящегося дальше (например, на расстоянии 3 м) от приемного устройства (например, базового блока 8). Большие пики в начале импульсной характеристики соответствуют акустическому тракту между динамиком 16 и микрофоном 18 в мобильном устройстве 6, в то время как второй набор задержанных пиков соответствует акустическому тракту между динамиком 28 в базовом блоке 8 и микрофоном 18 в мобильном устройстве 6.
Для так называемого помещения с осушенной атмосферой с небольшим временем реверберации, рассеянная часть импульсной характеристики имеет намного более низкую мощность по сравнению с прямым полем. Кроме того, чем ближе источник звука (например, рот пользователя) находится к приемному устройству (например, базовому блоку), тем больше соотношение между интенсивностью в прямом и рассеянном поле. В пределах радиусе реверберации или критически важного расстояния вокруг приемного устройства, интенсивность прямого поля равняется интенсивности рассеянного поля. За пределами этого радиуса присутствуют только рассеянные доли, и понятность речи, снимаемой посредством микрофона в базовом блоке, существенно падает. Это представляет собой проблему, которую не могут учитывать решения по определению расстояния на основе радиосвязи (т.е. RF).
Схема, иллюстрирующая обработку в первом варианте осуществления изобретения, показана на фиг 5. Блок-схема последовательности операций способа, показывающая соответствующий способ определения близости между мобильным устройством 6 и базовым блоком 8, показана на фиг 6.
В первом варианте осуществления изобретения, адаптивный фильтр комбинируется со схемой определения пиков для того, чтобы определять расстояние между пользователем (с мобильным устройством 6) и базовым блоком 8 с использованием, предпочтительно, двух наборов из двух сигналов. Первый вариант осуществления основан на использовании аудио, выводимого из динамика 28 в базовом блоке 8 (т.е. акустического сигнала на дальнем конце или акустического сигнала, сформированного из аудиофайла, сохраненного в запоминающем устройстве 31 базового блока 8), как показано на этапе 113 по Фиг. 2.
В частности, определение близости основано на эхо-сигнале, сформированном посредством динамика 16 мобильного устройства 6, определенном посредством микрофона 18 в мобильном устройстве 6 (прямое поле этого сигнала ассоциировано с сильной связью между динамиком 16 и микрофоном 18, и малая задержка), и эхо-сигнале, сформированном посредством динамика 28 в базовом блоке 8, определенном посредством микрофона 18 в мобильном устройстве 6 (этот эхо-сигнал ассоциирован со связью, которая зависит от расстояния между мобильным устройством 6 (т.е. пользователем) и базовым блоком 8). Задержка второго эхо-сигнала относительно прямого поля первого эхо-сигнала является пропорциональной расстоянию между мобильным устройством 6 и базовым блоком 8.
В этом первом варианте осуществления обработка, выполняемая согласно изобретению, предпочтительно выполняется посредством процессора 14 в мобильном устройстве 6, хотя следует принимать во внимание, что обработка вместо этого может быть выполнена посредством процессора 26 в базовом блоке 8.
Фиг. 5 показывает первый вариант осуществления в частотной области (с частотой ω). Обработка посредством процессора 14 состоит из адаптивного фильтра 42 между динамиком 16 мобильного устройства 6 и его микрофоном 18 и логическим блоком 44, который вычисляет расстояние между пользователем 4 (мобильным устройством 6) и базовой станцией 8.
Чтобы понимать влияние процесса беспроводного кодирования/декодирования между мобильным устройством 6 и базовым блоком 8 на результирующее решение на основе адаптивного фильтра, включается математическая модель речевого кодера 46 и декодера 48, используемых для того, чтобы передавать речевой сигнал из базовой станции 8 в мобильное устройство 6 (этот речевой кодер 46 должен быть реализован посредством процессора 26 в базовом блоке 8, а декодер 48 - посредством процессора 14 в мобильном устройстве 6). Операция кодирования может моделироваться в качестве операции изменяющейся во времени фильтрации и квантования. За исключением задержки в канале в беспроводном канале между базовым блоком 8 и мобильным устройством 6, которая может компенсироваться посредством модуля компенсации акустических эхо-сигналов, потери пакетов и другие нелинейные искажения в беспроводном канале игнорируются для целей этого анализа.
На Фиг. 5, данные сигналов на дальнем конце, принимаемых в базовом блоке 8 из станции дистанционного мониторинга (или сохраненный аудиофайл), обозначаются посредством X(ω), который выводится посредством динамика 28 базовой станции 8 в качестве акустического сигнала (этап 201 на Фиг. 6). Данные сигналов на дальнем конце также передаются в беспроводном режиме в мобильное устройство 6, после чего кодирование и передача через беспроводной канал (C(ω)) декодируется и выводится посредством динамика 16 в мобильном устройстве 6 в качестве акустического сигнала (этап 203 на Фиг. 6)

где A(ω) и Q(ω) моделируют влияние кодера, и A-1(ω) моделирует декодер.
При допущении идеального случая с Q(ω)=0 и C(ω)=e-jωδ, где δ является задержкой на передачу, акустический сигнал, сформированный посредством микрофона 18 в мобильном устройстве 6 (этап 205), задается следующим образом:

Оптимальные весовые коэффициенты W(ω) для критерия минимальной среднеквадратической ошибки (MMSE) являются следующими:

что состоит из суммы тракта передачи акустических эхо-сигналов от динамика 28 в базовой станции 8 до микрофона 18 в мобильном устройстве 6 плюс задержанная версия акустической связи между динамиком 16 и микрофоном 18 в мобильном устройстве 6. Обычно RF-задержка, ассоциированная с каналом, намного меньше задержки на распространение звука, и, следовательно, может считаться пренебрежимо малой, т.е. C(ω)=1 (тем не менее, обработка сигналов, ассоциированная с кодированием и декодированием сигнала, должна быть больше задержки на распространение). Следовательно, идеальное решение для W(ω) состоит просто из суммы двух трактов передачи эхо-сигналов. Помимо этого, поскольку усиления усилителей, возбуждающих отдельные динамики 16, 28, явно не включаются в модель, вместо этого они считается частью импульсных характеристик трактов передачи эхо-сигналов.
В нормальных условиях, тем не менее, кодер 46 вводит искажение в форме шума Q(ω) квантования, который может моделироваться (на высоких частотах) в качестве нулевого среднего статистически независимого аддитивного белого шума с мощностью:

что означает то, что квантованная мощность шума соответствует мощности декоррелированного сигнала Xe. Коэффициент G связан с SNR квантования.
Данные сигналов на дальнем конце (или данные аудиофайлов) используются для того, чтобы определять коэффициенты для адаптивного фильтра 42, чтобы минимизировать среднеквадратическую ошибку между выводом адаптивного фильтра 42 и принимаемым сигналом Y(ω) (этап 207).
Оптимальное решение весовых коэффициентов адаптивного фильтра может извлекаться следующим образом (при условии, что пользователь 4 не разговаривает и вносит аудио в принимаемый сигнал Y(ω):
Согласно уравнение (1) и такому допущению, что C(ω)=1, сигнал, выводимый посредством динамика 16 в мобильном устройстве 6, задается следующим образом:

где фактический шум квантования задается посредством XQ(ω)=Q(ω)A-1(ω).
Сигнал, принимаемый посредством микрофона 18 в мобильном устройстве 6, задается следующим образом:

где последний член представляет эхо-сигнал шума квантования входного сигнала.
Оптимальные весовые коэффициенты W(ω) для того, чтобы минимизировать среднеквадратическую ошибку (MSE) между выводом 42 фильтра и акустическим сигналом, принимаемым в микрофоне 18, задаются посредством решения Винера:

Знаменатель в (10), который обозначает спектральную плотность мощности (PSD) динамика 16 мобильного устройства 6, может быть развернут следующим образом:
Взаимная корреляция в числителе (10) может быть упрощена следующим образом:

Снова обращаясь к (10), если нет корреляции между сигналом 16 динамика и сигналом 18 микрофона по всем частотам, то решение Винера является нулем.
Математические ожидания второго и третьего члена равны нулю, поскольку:
Упрощение последнего члена вытекает из (11). Полученное в результате решение Винера задается следующим образом:

Таким образом, возвращаясь к Фиг. 5 и 6, чем лучше отношение "сигнал-шум" (SNR) квантователя, тем меньше значение G в уравнении 16, и тем ближе решение Винера к сумме двух импульсных характеристик. По существу, это означает то, что чем хуже квантователь, тем труднее обнаруживать разность во времени поступления между двумя эхо-сигналами. Чтобы компенсировать это, коэффициент усиления в G+1 может применяться к сигналу на дальнем конце, как показано посредством блока 50 в верхней ветви по Фиг. 5, хотя обычно это не обязательно, поскольку усиление, применяемое в базовом блоке 8, который размещает гораздо более крупный динамик 28, значительно выше усиления, применяемого к динамику 16 в мобильном устройстве 6.
Алгоритм на основе метода наименьших квадратов, к примеру NLMS, может быть использован для того, чтобы обновлять коэффициенты адаптивного фильтра и отслеживать изменения в оптимальном решении Винера. Эта адаптация выполняется посредством корреляции входного сигнала адаптивного фильтра с остаточным сигналом 51. Рекурсия обновления коэффициентов NLMS задается следующим образом:

где  и
и  представляют текущие и обновленные коэффициенты фильтра во временной области длины M,
представляют текущие и обновленные коэффициенты фильтра во временной области длины M,  является размером шага адаптации
является размером шага адаптации  является входным вектором, содержащим текущие M входных выборок, и r(n) является остаточным сигналом. Второй член в (17) содержит взаимную корреляцию между входным и остаточным сигналом. Предполагается, что M является достаточно длинным, чтобы моделировать акустический тракт. Для стационарного окружения коэффициенты фильтра в (17) сходятся к оптимальному решению, когда
является входным вектором, содержащим текущие M входных выборок, и r(n) является остаточным сигналом. Второй член в (17) содержит взаимную корреляцию между входным и остаточным сигналом. Предполагается, что M является достаточно длинным, чтобы моделировать акустический тракт. Для стационарного окружения коэффициенты фильтра в (17) сходятся к оптимальному решению, когда  .
.
Касательно задержки в канале и задержки, вызываемой посредством обработки сигналов (т.е. кодирования и декодирования), слишком большая задержка может влиять на точную оценку разности времен между Hm и Hb, поскольку это приводит к решению Винера с Hm, задержанным на величину, равную групповой задержке обработки плюс задержка в канале. Следовательно, задержка на компенсацию может применяться к выводу динамика 28, как показано посредством блока 52 в верхней ветви по Фиг. 5.
Поскольку решение Винера выражено с точки зрения отдельных трактов передачи акустических эхо-сигналов между динамиком 16 и микрофоном 18 мобильного устройства 6, логический блок 44 (процессор 14) определяет то, находится или нет мобильное устройство 6 рядом с базовым блоком 8 (и, следовательно, в предпочтительном варианте осуществления, то, следует или нет отключать динамик 18 мобильного устройства 6).
В частности, логический блок 44 анализирует энергию в акустической импульсной характеристике (например, как показано на Фиг. 3) и находит прямое поле, ассоциированное с динамиком 16 в мобильном устройстве 6, и прямое поле тракта передачи эхо-сигналов, ассоциированное с динамиком 28 в базовом блоке 8 (этап 211 на Фиг. 6).
Предпочтительно, до этапа 211, квадрат магнитуды коэффициентов адаптивного фильтра сглаживается. Далее, фильтр на основе скользящего среднего (MA) используется для того, чтобы сглаживать квадрат магнитуды коэффициентов адаптивного фильтра. Этот фильтр с конечной импульсной характеристикой (FIR) задается следующим образом:

где N является длиной фильтра. Чем длиннее фильтр, тем большее сглаживание и разброс импульсной характеристики адаптивного фильтра возникает. Значение N может задаваться в зависимости от практических соображений наименьшего предполагаемого расстояния между мобильным устройством 6 и базовым блоком 8. При 8 кГц одна выборка соответствует 125 мкс, т.е. времени, требуемому для звука, чтобы проходить 4,3 см. Предпочтительно, N может задаваться между 4 и 12 выборками (согласно расстояниям 17 и 50 см), с тем чтобы предотвращать ложные определения. Выбор значения для N, которое является слишком большим, приводит к размыванию квадрата магнитуды импульсной характеристики. Фиг. 7 показывает сглаженный квадрат магнитуды импульсной характеристики адаптивного фильтра 42.
Логический блок 44 может находить прямое поле, ассоциированное с динамиком 16 в мобильном устройстве 6, и прямое поле тракта передачи эхо-сигналов, ассоциированное с динамиком 28 в базовом блоке 8, на этапе 211 по Фиг. 6 посредством идентификации локальных максимумов в сглаженной магнитуде импульсной характеристики, т.е. выборок с магнитудой, превышающей магнитуду для левой и правой соседних выборок, т.е.:

Вторые наибольшие локальные максимумы могут рассматриваться как соответствующие импульсной характеристике тракта (Hb) передачи эхо-сигналов из базового блока 8. Расстояние d между ними и глобальным максимумом (т.е. тракт Hm передачи эхо-сигналов из динамика 16 мобильного устройства 6) соответствует выборочному расстоянию между мобильным устройством 6/пользователем 4 и базовым блоком 8 (этап 213 на Фиг. 6). Это расстояние затем преобразуется в расстояние в метрах согласно следующему:

где fs является частотой дискретизации в Гц, и c является скоростью звука в воздухе в мс-1 (которая составляет приблизительно 343 мс-1). В примере, показанном на Фиг. 7, расстояние вычисляется как равное 64x343/8000=2,75 м.
В зависимости от этого значения:
Sw=1 (т.е. включенный динамик 16), если D≥Th1 (21)
Sw=0 (т.е. выключенный динамик 16), если D<Th1, (22)
где Th1 является некоторым пороговым расстоянием, например, Th1=3 м. Следует принимать во внимание, что предусмотрены другие способы для идентификации пиков в общей импульсной характеристике для определения расстояния между прямым полем, ассоциированным с динамиком 16 в мобильном устройстве 6, и прямым полем тракта передачи эхо-сигналов, ассоциированным с динамиком 28 в базовом блоке 8.
Кроме того, магнитуда второго наибольшего максимума, соответствующего импульсной характеристике тракта передачи эхо-сигналов из динамика 28 в базовом блоке 8, по сравнению с магнитудой глобального максимума может быть использована в качестве другого показателя (или в сочетании с показателем расстояния), т.е.:
Sw=0 (т.е. выключенный динамик 16), если p2/pmax≥Th2 (23)
Sw=1 (т.е. включенный динамик 16), в противном случае, (24)
где Th2 является некоторым пороговым значением, которое зависит от коэффициента усиления усилителя динамика базового блока 8 и меньше единицы, pmax является магнитудой глобального максимума, и p2 является амплитудой второго наибольшего максимума. Пороговое значение Th2 может быть определено экспериментально на основе настроек усилителя для динамиков 16 и 28. В отличие от показателя расстояния, этот показатель учитывает качество акустического тракта между пользователем 4 и мобильным устройством 6 и базовым блоком 8, т.е. то, имеются или нет потери акустической энергии вследствие отражений и реверберации.
Следует принимать во внимание, что предусмотрены другие показатели для того, чтобы оценивать качество акустики между пользователем 4 и мобильным устройством 6 и базовым блоком 8, к примеру, использование дисперсии импульсной характеристики около второго пика в качестве показателя величины реверберации. Эта дисперсия может быть основана на локализованном показателе разреженности, к примеру:

где N является длиной взвешивающей функции для анализа около второго пика, и w является коэффициентами фильтра в этой взвешивающей функции для анализа.  и
и  представляют 1- и 2-векторные нормы, соответственно. Второй показатель, который может быть использован, представляет собой оценку времени реверберации или T60 импульсной характеристики около второго пика. T60 обозначает время реверберации, которое задается как время, которое требуется для спада энергии в рассеянном поле эхо-сигнала на 60 дБ. Таким образом, в помещении с высокой реверберацией это время является довольно большим (около 1 секунды, аналогично импульсной характеристике на Фиг. 3), но для помещения с осушенной атмосферой оно обычно составляет менее 350 мс. T60 измеряется посредством анализа импульсной характеристики и так называемой кривой спада энергии (EDC).
представляют 1- и 2-векторные нормы, соответственно. Второй показатель, который может быть использован, представляет собой оценку времени реверберации или T60 импульсной характеристики около второго пика. T60 обозначает время реверберации, которое задается как время, которое требуется для спада энергии в рассеянном поле эхо-сигнала на 60 дБ. Таким образом, в помещении с высокой реверберацией это время является довольно большим (около 1 секунды, аналогично импульсной характеристике на Фиг. 3), но для помещения с осушенной атмосферой оно обычно составляет менее 350 мс. T60 измеряется посредством анализа импульсной характеристики и так называемой кривой спада энергии (EDC).
Следует принимать во внимание, что вышеприведенное пояснение этого первого варианта осуществления допускает то, что динамик 16 мобильного устройства 6 включается, и импульсная характеристика, соответствующая эхо-сигналу из базового блока 8, задается посредством второго наибольшего максимума в сглаженном квадрате магнитуды характеристики адаптивного фильтра 42.
Тем не менее, если динамик 16 мобильного устройства 6 выключен (по умолчанию или согласно предшествующему решению выключать динамик 16) в то время, когда осуществляется обработка, то импульсная характеристика, соответствующая базовому блоку 8, задается посредством глобального максимума в сглаженном квадрате магнитуды характеристики адаптивного фильтра 42. Это может представлять собой более надежное решение проблемы. В этом случае, мобильное устройство 6 по-прежнему принимает данные сигналов на дальнем конце по беспроводному соединению между мобильным устройством 6 и базовым блоком 10 (или уже имеет аудиофайл сохраненный в запоминающем устройстве 21), и использует этот сигнал или файл на этапах обработки, как описано выше. Позиция глобального максимума преобразуется в расстояние без опорной точки, извлеченной из тракта передачи эхо-сигналов из динамика 16, посредством использования вместо этого первого отвода фильтра в качестве опорной точки. Это является приемлемым, поскольку динамик 16 мобильного устройства 6 находится настолько близко к микрофону 18, что первый локальный пик в любом случае обычно находится в пределах первых нескольких коэффициентов адаптивного фильтра. Помимо этого, когда динамик 16 отключается, показатель мощности с Th2 не может быть использован, но показатель расстояния и дисперсии при этом могут быть использованы.
В любом случае (т.е. независимо от того, включены или выключены динамик 16 и ассоциированные компоненты), обработка может адаптивно выполняться в фоновом режиме в ходе вызова при условии, что микрофон 18 в мобильном устройстве 6 включен.
В случае если вывод из динамика 28 формируется из сохраненного аудиофайла, вышеуказанная обработка отличается тем, что кодер 46 и декодер 48 не требуются, так что Q(ω)=0 и A(ω)=1. В этой реализации первого варианта осуществления, когда инициируется вызов, из мобильного устройства 6 в базовый блок 8 может отправляться сигнал триггера, который инструктирует базовому блоку 8 начинать вызов и воспроизводить предварительно записанный аудиофайл из запоминающего устройства 31. Одновременно, аудиофайл извлекается из запоминающего устройства 21 в мобильном устройстве 6 и вводится в адаптивный фильтр (в этой реализации, вывод аудиофайла через динамик 16 мобильного устройства 6 также не всегда требуется, аналогично варианту осуществления, описанному выше). Вывод аудиофайла тем самым предоставляет самую эффективную реализацию первого варианта осуществления изобретения с точки зрения объема передаваемых служебных сигналов, требуемых между мобильным устройством 6 и базовым блоком 8 для того, чтобы устанавливать вызов, и обработки, требуемой для того, чтобы определять близость или качество акустики.
Также следует принимать во внимание, что сигнал на дальнем конце может предоставляться непосредственно в мобильное устройство 6, а также базовый блок 8, и в этом случае обработка является аналогичной варианту осуществления для сохраненного аудиофайла, описанному в предыдущем абзаце.
Хотя этот первый вариант осуществления описан в отношении анализа акустического сигнала, принимаемого из динамика 28 в базовом блоке 8 в микрофоне 18 мобильного устройства 6 (акустического сигнала из источника на дальнем конце или сохраненного аудиофайла), вместе с акустическим сигналом, принимаемым из динамика 16 в мобильном устройстве 6 (когда динамик 16 является активным), следует принимать во внимание, что расстояние или качество акустики между мобильным устройством 6 и базовым блоком 8 вместо этого может быть определено посредством анализа акустического сигнала, принимаемого в микрофоне 18 мобильного устройства 6 из базового блока 8, и соответствующего аудиосигнала, выводимого посредством динамика 28 в базовом блоке 8 и принимаемого посредством микрофона 30. Специалисты в данной области техники должны принимать во внимание, что обработка, требуемая в этих реализациях, в общем, является аналогичной обработке, описанной в предыдущих абзацах.
В еще одной дополнительной модификации первого варианта осуществления расстояние между мобильным устройством 6 и базовым блоком 8 может быть определено посредством анализа акустического сигнала, принимаемого в микрофоне 30 в базовом блоке 8, который выведен посредством динамика 16 в мобильном устройстве 6 и, необязательно, вместе с идентичным акустическим сигналом, принимаемым в микрофоне 18 в мобильном устройстве 6 из динамика 16, или идентичным акустическим сигналом, принимаемым в микрофоне 30 в базовом блоке 8, который выведен посредством его динамика 28. С другой стороны, специалисты в данной области техники должны принимать во внимание, что обработка, требуемая в этих реализациях, в общем, является аналогичной обработке, описанной в предыдущих абзацах. Тем не менее, эти реализации являются менее предпочтительными, поскольку аудио, выводимое посредством динамика 16 в мобильном устройстве 6, в общем, не является настолько громким, как аудио, выводимое посредством базового блока 8 (частично вследствие ограничений по мощности и размеру, а также того факта, что мобильное устройство 6 вероятно находится близко к пользователю 4 при использовании), и, следовательно, маловероятно, что пики в сигналах, принимаемых в базовом блоке 8, являются настолько сильными.
Схема, иллюстрирующая обработку во втором варианте осуществления изобретения, показана на фиг 8. Блок-схема последовательности операций способа, показывающая соответствующий способ определения близости между мобильным устройством 6 и базовым блоком 8, показана на фиг 9.
Во втором варианте осуществления изобретения, адаптивный фильтр также комбинируется со схемой определения пиков для того, чтобы определять расстояние между пользователем 4 (с мобильным устройством 6) и базовым блоком 8 с использованием двух наборов из двух сигналов. Второй вариант осуществления основан на использовании сигнала на ближнем конце, как показано на этапе 115 по Фиг. 2.
В частности, определение близости основано на сигнале, сформированном посредством речи пользователя 4 мобильного устройства 6, определенном посредством микрофона 18 в мобильном устройстве 6 (прямое поле этого сигнала ассоциировано с сильной связью между пользователем 4 и микрофоном 18 и малой задержкой), и идентичном сигнале, сформированном посредством речи пользователя 4 в микрофоне 18 в базовом блоке 8 (этот сигнал ассоциирован со связью, которая зависит от расстояния, а также акустической среды между пользователем 4 (т.е. мобильным устройством 6) и базовым блоком 8). Задержка второго эхо-сигнала относительно прямого поля первого эхо-сигнала является пропорциональной расстоянию между мобильным устройством 6 и базовым блоком 8.
В этом втором варианте осуществления обработка, выполняемая согласно изобретению, предпочтительно выполняется посредством процессора 26 в базовом блоке 8, хотя следует принимать во внимание, что обработка вместо этого может быть выполнена посредством процессора 14 в мобильном устройстве 6.
Этот вариант осуществления изобретения не использует динамик 16 в мобильном устройстве 6, так что не важно, подается питание в динамик 16 или нет.
Микрофон 18 в мобильном устройстве 6 определяет аудио (т.е. речь), S(ω), от пользователя 4 (этап 301 на Фиг. 9) и передает принимаемый аудиосигнал X(ω) в базовый блок 8 через канал C(ω) (этап 303).
Микрофон 30 в базовом блоке 8 также определяет идентичное аудио (т.е. речь), S(ω), от пользователя 4 (этап 305).
Обработка посредством процессора 26 состоит из адаптивного фильтра 54 и логического блока 56 для вычисления задержки между сигналами, поступающими в микрофон 18 мобильного устройства 6 и микрофон 30 базового блока 8.
Аналогично, модель 60 речевого кодера 58, используемого для того, чтобы передавать речевой сигнал X(ω) из мобильного устройства 6 в базовую станцию 8, включается, чтобы помочь с анализом (этот речевой кодер 58 должен быть реализован посредством процессора 14 в мобильном устройстве 6, а декодер 60 должен быть реализован посредством процессора 26 в базовом блоке 8). Аналогично первому варианту осуществления, операция кодирования может моделироваться в качестве операции изменяющейся во времени фильтрации и квантования, и за исключением задержки в беспроводном канале между мобильным устройством 6 и базовым блоком 8, которая может компенсироваться посредством модуля компенсации акустических эхо-сигналов, потери пакетов и другие нелинейные искажения в беспроводном канале игнорируются для целей этого анализа.
Обработка выполняется аналогично первому варианту осуществления, т.е. коэффициенты адаптивного фильтра определяются для того, чтобы минимизировать среднеквадратическую ошибку сигналов (этап 307), квадрат магнитуды коэффициентов необязательно сглаживается (этап 309), прямые поля, ассоциированные с речью пользователя в каждом из принимаемых сигналов, идентифицируются (этап 311), и расстояние между мобильным устройством 6 и базовым блоком 8 определяется из идентифицированных прямых полей (этап 313).
В частности, оптимальное решение для весовых коэффициентов адаптивного фильтра в отношении MMSE задается посредством решения Винера:

где:

Числитель и знаменатель в (26) дополнительно могут быть упрощены следующим образом:

соответственно, где G представляет собой коэффициент, связанный с SNR квантования. Следовательно, полученное в результате решение Винера является следующим:

Рассмотрим сценарий свободного поля, в котором передаточные функции Hb(ω) и Hm(ω) являются простыми задержками, т.е.:

где предполагается, что δ1>δ2, в таком случае:

что соответствует задержанному импульсу во время t=δ1-δ2. Если задержка обработки для кодера 58 и декодера 60 компенсируется посредством вставки задержки 62 в тракт микрофона базового блока 8, то δ2 может считаться равным нулю, и местоположение пика в импульсной характеристике во временной области предоставляет оценку выборочного расстояния между пользователем 4 и базовым блоком 8.
Расстояние между пользователем 4 и базовым блоком 8 может сравниваться с пороговым расстоянием Th3 (которое может быть идентичным Th1), и, в зависимости от этого значения:
Sw=1 (т.е. включенный динамик 16), если D≥Th3 (35)
Sw=0 (т.е. выключенный динамик 16), если D<Th3 (36)
Аналогично первому варианту осуществления, качество акустики речи может быть определено из акустической импульсной характеристики. Это может быть основано на уравнениях 23, 24 и 25, изложенных выше.
Следует принимать во внимание, что этот второй вариант осуществления также может быть реализован посредством непосредственного вычисления взаимной корреляции между сигналами Yb и Y временной области на Фиг. 8:

для задержки на выборку  <N. Специалисты в данной области техники должны знать, что предусмотрено множество других способов вычисления взаимной корреляции между двумя сигналами.
<N. Специалисты в данной области техники должны знать, что предусмотрено множество других способов вычисления взаимной корреляции между двумя сигналами.
Как указано выше, способ на Фиг. 2 может работать с использованием анализа сигналов на дальнем конце и на ближнем конце, когда каждый сигнал становится активным, и решение касательно близости может быть принято на основе результата обоих измерений. Например, если один вариант осуществления выводит Sw=1 (т.е. включен динамик 16), а другой вариант осуществления определяет то, что Sw=0 (т.е. выключен динамик 16), то окончательное решение с учетом этой неопределенности может состоять в том, чтобы поддерживать динамик 16 в мобильном устройстве 6 включенным.
В модификации первого и второго вариантов осуществления, описанных выше, в которой имеются ограничения по полосе пропускания в беспроводном канале между мобильным устройством 6 и базовым блоком 8, например, которые предотвращают передачу аудио, дискретизированного при 8 кГц между мобильным устройством 6 и базовым блоком 8, акустический сигнал может быть преобразован в более приблизительное представление как в мобильном устройстве 6, так и в базовом блоке 8. Это представление должно сохранять временные метки для определения расстояния между мобильным устройством 6 и базовым блоком 8, но также может передавать другие признаки в отношении свойств сигнала, чтобы определять снижение качества акустики, вызываемое посредством акустического тракта или расстояния между мобильным устройством 6 и базовым блоком 8.
Представления, которые сохраняют важные временные метки сигнала и которые по-прежнему используют операцию адаптивной фильтрации, включают в себя сглаживание сигнала в форме выпрямления и вычисление огибающей сигнала. После этой операции также может выполняться фильтрация для сглаживания наложения спектров и понижающая дискретизация сигнала, чтобы сокращать число передаваемых выборок в секунду. В этих вариантах осуществления, передаваемый речевой сигнал может быть неприменимым для передачи в центр реагирования на дальнем конце. Специалисты в данной области техники должны знать альтернативные представления сигнала, которые сохраняют важные характеристики временной области, которые могут быть использованы для того, чтобы определять расстояние и качество акустики между мобильным устройством 6 и базовым блоком 8.
Представления сигнала, которые могут быть использованы для того, чтобы определять качество акустики между мобильным устройством 6 и базовым блоком 8, связаны с энергией в сигналах или статистических моментах высшего порядка. Они могут передаваться менее часто и сравниваться в мобильном устройстве 6 или в базовом блоке 8.
Следует принимать во внимание, что обработка, выполняемая согласно вариантам осуществления изобретения, может быть реализована с использованием аппаратных средств или программного обеспечения, или комбинации означенного.
Следовательно, описывается альтернативный подход для RF-способов для определения близости мобильного устройства 6 (и пользователя 4) к базовому блоку 8, который, в предпочтительных вариантах осуществления, дает возможность принятия решения в отношении работы динамика 16 мобильного устройства 6 в ходе связи после оценки способности пользователя 4 слышать и воспринимать речь из динамика 28 в базовом блоке 8.
Хотя изобретение подробно проиллюстрировано и описано на чертежах и в вышеприведенном описании, такое иллюстрирование и описание должны считаться иллюстративными или примерными, а не ограничивающими; изобретение не ограничено раскрытыми вариантами осуществления.
Вариации в раскрытых вариантах осуществления могут пониматься и выполняться специалистами в данной области техники при применении на практике заявленного изобретения, из изучения чертежей, раскрытия сущности и прилагаемой формулы изобретения. В формуле изобретения слово "содержащий" не исключает другие элементы или этапы, и перечисление элементов в единственном числе не исключает их множества. Один процессор или другой модуль может выполнять функции нескольких элементов, изложенных в формуле изобретения. Простой факт того, что определенные меры упомянуты в различных зависимых пунктах формулы изобретения, не означает того, что комбинация этих мер не может быть использована с выгодой. Компьютерная программа может сохраняться/распространяться на подходящем носителе, таком как оптический носитель хранения данных или полупроводниковый носитель, поставляемом вместе или в качестве части других аппаратных средств, но также может распространяться в других формах, к примеру, через Интернет либо другие системы проводной или беспроводной связи. Все ссылочные обозначения в формуле изобретения не должны рассматриваться как ограничивающие объем.
Изобретение относится к области радиосвязи. Техническим результатом является определение близости мобильного устройства к базовому блоку посредством оценки расстояния и/или качества акустики между мобильным устройством и базовым блоком. Упомянутый технический результат достигается тем, что принимают акустический сигнал посредством микрофона в одном из упомянутого мобильного устройства и базового блока; определяют корреляцию второго сигнала с принимаемым акустическим сигналом и определяют качество акустики и/или расстояние между мобильным устройством и базовым блоком на основе одного или более пиков в результате этапа определения корреляции. 3 н. и 13 з.п. ф-лы, 10 ил.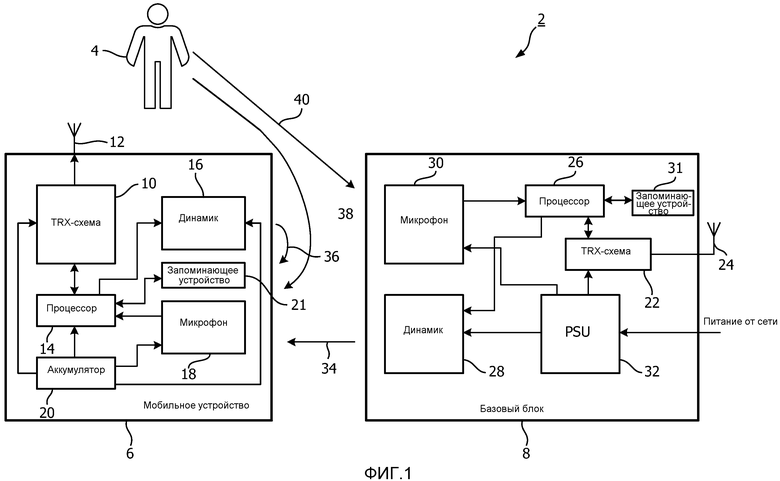
1. Способ определения расстояния между мобильным устройством, имеющим микрофон и динамик, и базовым блоком, содержащим микрофон и динамик, при этом мобильное устройство выполнено с возможностью осуществлять беспроводную связь с базовым блоком, и базовый блок выполнен с возможностью подключаться к станции дистанционного мониторинга через сеть связи, при этом способ содержит этапы, на которых:
- принимают акустический сигнал посредством микрофона в одном из упомянутого мобильного устройства и базового блока;
- определяют корреляцию второго сигнала с принимаемым акустическим сигналом, при этом второй сигнал соответствует (а) акустическому сигналу, принимаемому посредством микрофона в другом одном из упомянутого мобильного устройства и базового блока, или (b) управляющему сигналу, используемому для того, чтобы управлять динамиком в другом одном из упомянутого мобильного устройства и базового блока, чтобы выводить акустический сигнал; и
- определяют расстояние между мобильным устройством и базовым блоком на основе одного или более пиков в результате этапа определения корреляции.
2. Способ по п. 1, в котором акустический сигнал, принимаемый посредством микрофона в упомянутом одном из упомянутого мобильного устройства и базового блока, принимается из динамика в другом одном из упомянутого мобильного устройства и базового блока, при этом динамик выводит акустический сигнал в ответ на управляющий сигнал.
3. Способ по п. 2, в котором второй сигнал соответствует сигналу, используемому для того, чтобы управлять динамиком в упомянутом другом одном из упомянутого мобильного устройства и базового блока, чтобы выводить акустический сигнал.
4. Способ по п. 2, причем способ дополнительно содержит этап, на котором:
- принимают акустический сигнал в микрофоне в упомянутом другом одном из упомянутого мобильного устройства и базового блока.
5. Способ по п. 4, в котором второй сигнал соответствует акустическому сигналу, принимаемому посредством микрофона в упомянутом другом одном из упомянутого мобильного устройства и базового блока.
6. Способ по п. 2, причем способ дополнительно содержит этап, на котором:
- управляют динамиком в упомянутом одном из упомянутого мобильного устройства и базового блока, чтобы также выводить акустический сигнал;
- при этом этап приема акустического сигнала посредством микрофона в одном из упомянутого мобильного устройства и базового блока содержит этап, на котором принимают акустический сигнал из динамика в упомянутом мобильном устройстве и упомянутом базовом блоке.
7. Способ по п. 6, в котором этап определения расстояния между мобильным устройством и базовым блоком содержит этап, на котором:
- определяют первый пик в результате этапа определения, соответствующий акустическому сигналу из динамика в упомянутом одном из упомянутого мобильного устройства и базового блока, и второй пик, соответствующий акустическому сигналу из динамика в упомянутом другом одном из упомянутого мобильного устройства и базового блока, и определяют расстояние между мобильным устройством и базовым блоком из расстояния между первым и вторым пиками в результате этапа определения.
8. Способ по п. 7, дополнительно содержащий этап, на котором:
- определяют качество акустики между мобильным устройством и базовым блоком из (i) соотношения магнитуд обнаруженных пиков; (ii) дисперсии около второго пика; и/или (iii) времени реверберации около второго пика.
9. Способ по любому из пп. 6-8, в котором второй сигнал соответствует сигналу, используемому для того, чтобы управлять динамиком в упомянутом другом одном из упомянутого мобильного устройства и базового блока, чтобы выводить акустический сигнал.
10. Способ по любому из пп. 2-8, в котором управляющий сигнал, используемый для того, чтобы управлять динамиком в упомянутом другом одном из упомянутого мобильного устройства и базового блока, содержит речевой сигнал, принимаемый из станции дистанционного мониторинга, или сигнал, полученный из аудиофайла, сохраненного локально в упомянутом мобильном устройстве и/или упомянутом базовом блоке.
11. Способ по п. 1, в котором этап приема акустического сигнала содержит этап, на котором принимают акустический сигнал посредством микрофона в базовом блоке, причем способ дополнительно содержит этап, на котором:
- принимают акустический сигнал посредством микрофона в мобильном устройстве, при этом акустический сигнал, принимаемый посредством микрофона в мобильном устройстве, используется в качестве второго сигнала на этапе определения корреляции второго сигнала с принимаемым акустическим сигналом.
12. Способ по п. 11, в котором акустический сигнал, принимаемый посредством микрофонов в мобильном устройстве и базовом блоке, является речью пользователя мобильного устройства.
13. Способ по любому из пп. 2-5, 11 или 12, в котором этап определения содержит этап, на котором определяют расстояние между мобильным устройством и базовым блоком из времени пика, определенного в результате этапа определения.
14. Способ по любому из пп. 2-5, 11 или 12, в котором этап определения содержит этап, на котором определяют качество акустики между мобильным устройством и базовым блоком из (i) дисперсии около обнаруженного пика; и/или (ii) времени реверберации около обнаруженного пика.
15. Способ уменьшения потребляемой мощности мобильного устройства, при этом способ содержит этапы, на которых:
- определяют расстояние между мобильным устройством и базовым блоком согласно способу по любому из пп. 1-14; и
- деактивируют динамик мобильного устройства, если определено, что мобильное устройство находится ближе порогового расстояния к базовому блоку.
16. Система определения расстояния между мобильным устройством и базовым блоком, содержащая:
- мобильное устройство, имеющее микрофон и динамик;
- базовый блок, имеющий микрофон и динамик; и
- процессор;
- при этом одно из мобильного устройства и базового блока выполнено с возможностью принимать посредством микрофона акустический сигнал;
- при этом процессор выполнен с возможностью:
- определять корреляцию второго сигнала с принимаемым акустическим сигналом, при этом второй сигнал соответствует (а) акустическому сигналу, принимаемому посредством микрофона в другом одном из упомянутого мобильного устройства и базового блока, или (b) управляющему сигналу, используемому для того, чтобы управлять динамиком в другом одном из упомянутого мобильного устройства и базового блока, чтобы выводить акустический сигнал; и
- определять расстояние между мобильным устройством и базовым блоком на основе одного или более пиков в результате этапа определения.
| US2008304361 A1, 11.12.2008 | |||
| US6952471 B1, 04.10.2005 | |||
| US2008240415 A1, 02.10.2008 | |||
| WO2008087409 A1, 24.07.2008 | |||
| WO2011001010 A1, 06.01.2011 | |||
| ПРИГЛУШЕНИЕ МИКРОФОНА В СИСТЕМАХ РАДИОСВЯЗИ | 1997 |
|
RU2187199C2 |

