ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к выявлению сходства сигналов, и конкретно, к обнаружению эхосигнала в системах связи.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В некоторых применениях необходимо выявлять присутствие возможно модифицированной версии известного речевого сигнала в принятом сигнале, который может состоять из нескольких речевых и шумовых составляющих, и оценивать относительную задержку интересующей составляющей. Примерами таких применений являются контроль эхосигнала, накопление сетевой статистики и многосторонние коммутаторы конференц-связи.
Основная проблема проиллюстрирована на фиг.1. Известный речевой сигнал задерживается в блоке 10 задержки и находится под воздействием неизвестного преобразования 12 на своем пути на точку 14 суммирования. Он может достичь или может не достичь точки суммирования (переключатель 16 может быть открыт или закрыт). В точке суммирования сигнал смешивается с другими речевыми сигналами и шумом. На своем пути обратно на точку, от которой был передан исходный сигнал, сигнал от точки 14 суммирования вновь является измененным посредством неизвестного преобразования 18 и блока 20 задержки. Задача состоит в обнаружении, присутствует ли возможно модифицированная версия исходного известного речевого сигнала в принятом сигнале, и если присутствует, то оценить ее относительную задержку по отношению к известному речевому сигналу. Это выполняется посредством блока 22 обнаружения и оценки задержки.
Явление слышимости задержанных отражений собственного голоса называется эхосигналом. В телефонной сети основным источником эхосигнала является электрическое отражение в так называемой гибридной схеме, соединяющей 4-проводную часть сети с двухпроводной абонентской линией. Этот электрический отраженный сигнал обычно обрабатывается посредством сетевых эхокомпенсаторов, установленных в телефонной системе. Сетевой эхокомпенсатор обычно должен устанавливаться близко к источнику эхосигнала. Например, сетевые эхокомпенсаторы требуется в медиашлюзах, стыкующих сети с передачей пакетов (протоколов IP (интернет-протокол) или ATM (асинхронный режим передачи)) с сетями телефонной коммутируемой сети (ТфОП, PSTN) общего пользования, или центрах коммутации услуг мобильной связи, стыкующих сети мобильной связи с PSTN-сетями. Подобным образом, если задержка сквозной передачи превышает 25 мс, сетевые эхокомпенсаторы должны устанавливаться на международных телефонных станциях и в некоторых ситуациях на телефонных станциях внутри одной страны, см. [1]. В некоторых случаях сетевой эхокомпенсатор, однако, может отсутствовать в надлежащем для него месте, то есть на телефонной станции близко к источнику эхосигнала. Если это так, то дальние телефонные вызовы на такие местоположения и от такого местоположения могут испытывать трудности из-за эхосигнала. Оператор международной связи в другой стране может пожелать разрешать трудности для своих собственных клиентов путем обнаружения вызовов, имеющих эхосигнал, сформированный на удаленном местоположении, и предпринимать надлежащие меры для удаления эхосигнала. Чтобы выполнить это, необходимо выделять эхосигнал и оценивать его задержку.
Другим источником эхосигнала является акустическая связь между громкоговорителем и микрофоном телефона (терминала). Этот тип эхосигнала может возвращаться, например, от терминалов мобильной связи или IP-телефонов. В идеале терминалы должны обрабатывать свои собственные эхосигналы таким образом, чтобы эхосигнал не передавался обратно на систему. Даже при том, что многие из используемых в настоящее время терминалов способны обрабатывать свои собственные эхосигналы надлежащим образом, еще имеются модели, которые не выполняют этого.
Проблема акустического эхосигнала не является простой для решения в сети, см. [2], поскольку тракт эхосигнала включает в себя кодеры и декодеры речи. Кроме того, в случае сетей мобильной связи сигналы передаются по радиоканалу, который вносит в сигнал ошибки в битах. Это делает тракт прохождения эхосигнала нелинейным и непостоянным и вносит неизвестную задержку в тракт эхосигнала, так что обычные сетевые эхокомпенсаторы обычно являются неспособными справиться с акустическими эхосигналами, возвращенными от терминалов мобильной связи. Вновь для того чтобы справиться с эхосигналами, сначала требуется выявить, имеется ли эхосигнал в запросе, и если имеется, то оценить его задержку.
Другим применением, где полезен этот тип обнаружения, является накопление сетевой статистики. Оператор связи может пожелать накапливать различные статистические данные, относящиеся к качеству телефонных вызовов в своей сети. Некоторой представляющей интерес статистикой является присутствие эхосигналов, возвращенных от терминалов (например, телефонов мобильной связи или IP-телефонов) и задержка Δ, связанная с этими эхосигналами. Чтобы выполнять эту задачу, блок накопления статистики может включать в себя блок 22 обнаружения и оценки задержки, как проиллюстрировано на фиг.1. В этом примере результаты обнаружения и оценки будут сохраняться в базе данных для использования впоследствии в противоположность немедленному использованию результатов для управления эхосигналом в предыдущих примерах. Сохраненная в базе данных статистика может использоваться, чтобы представлять агрегированную сетевую статистику. Она также может использоваться для поиска и устранения неисправностей, если потребитель выражает неудовлетворение качеством речи, принятым посредством оператора.
Еще одним применением является многосторонний коммутатор конференц-связи, см. [3]. В многостороннем коммутаторе, предназначенном для телекоммуникационной системы, входящие сигналы микрофона от различных сторон смешиваются в цифровой форме и передаются на громкоговорители различных сторон. В качестве примера в основном варианте осуществления входящие сигналы от всех сторон могут смешиваться и передаваться всем сторонам. По некоторым причинам, например, чтобы снизить уровень фонового шума передаваемого сигнала, некоторые исполнения многосторонних коммутаторов смешивают только входящие сигналы от установленного поднабора сторон. Этот выбор обычно выполняется на основе уровня сигнала и активности динамика (говорящего) различных сторон, при этом удерживаются самые последние по времени активные абоненты, если отсутствует активность динамика от какой-либо другой стороны. Дополнительной модификацией базовой работы является то, что поступающий от стороны А сигнал микрофона может быть исключен из величины (суммы) сигнала, передаваемого обратно на сторону A. Причины для этого состоят в том, что сигнал микрофона от стороны А уже присутствует в громкоговорителе говорящего абонента А (вследствие местного эффекта в телефонном оборудовании), и в том, что, если в системе имеется значительная задержка передачи, сигнал микрофона будет восприниматься в виде нежелательного эхосигнала.
При возросшем использовании различных терминалов мобильной связи (например, телефонов сотовой связи) ситуации, когда два или более пользователей в конференц-связи по телефону могут находиться в одном и том же местоположении, станет более обычной. В этих ситуациях речевой сигнал от пользователя А будет также присутствовать в качестве входного сигнала на микрофон пользователя B. При значительной задержке передачи этот сигнал, поступающий от микрофона пользователя B, будет вносить пользователю А нежелательный эхосигнал от говорящего абонента. Кроме того, сигнал микрофона от пользователя А будет передаваться на громкоговоритель пользователя B. Вследствие прямого тракта передачи голоса между говорящим А и пользователем B при значительной задержке передачи системы это может вызывать, что пользователь B воспринимает эхо слушающего от говорящего абонента A. Точно так же, если сигналы микрофона от пользователей А и B передаются другим сторонам, этот сигнал может содержать нежелательное эхо слушающего от говорящего абонента A. Следовательно, имеется потребность в обнаружении перекрестной наводки между двумя входящими линиями связи на коммутатор многосторонней конференции, и в управлении передачей соответствующим пользователям на основании этой выявленной перекрестной наводки.
В данном описании составляющая принятого сигнала, происходящая из известного сигнала, будет называться эхосигналом.
Имеются несколько способов обнаружения эхосигналов. Например, можно использовать набор коротких адаптивных фильтров, охватывающих диапазон значений представляющей интерес задержки и связанную гистограмму, чтобы определять, имеется ли эхосигнал, и оценивать его задержку. Это решение описано в [1]. Трудностью этого решения является его высокая вычислительная стоимость.
Другой известный способ состоит в том, чтобы коррелировать мощность сигнала восходящей линии связи и нисходящей линии связи для нескольких представляющих интерес задержек. Эхосигнал может быть обнаружен на основании наблюдений корреляции мощности между восходящей линии связи и нисходящей линии связи за промежуток времени. Эхосигнал является обнаруженным, если корреляция мощности для некоторой задержки присутствовала в течение достаточно длительного промежутка времени. Если эхосигнал обнаружен для нескольких задержек, то задержка, где корреляция мощности является наибольшей, выбирается в качестве оценки задержки, см. [5]. Трудностью этого решения является его медленная сходимость (корреляция мощности должна присутствовать в течение достаточно длительного времени, чтобы выявить эхосигнал и оценить его задержку надежно).
Общий недостаток обоих описанных способов состоит в том, что они не могут применяться непосредственно к кодированной речи без декодирования сначала речевых сигналов. Способность действовать непосредственно на кодированный поток двоичных сигналов становится в большей степени важной, поскольку в сетях вводятся режимы передачи голоса без транскодирования (TrFO) и режим передачи сжатого голоса без декодирования (TFO) (без парного действия кодирование-декодирование).
КРАТКОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является упрощенное обнаружение эхосигнала и, в частности, обнаружение эхосигнала, подходящее для применения к кодированным двоичным потокам.
Другой задачей является мера, подходящая для представления сходства между двумя сигналами.
Решений этих задач достигают в соответствии с прилагаемой формулой изобретения.
Настоящее изобретение основывается на сравнении основного тона. Кратко, настоящее изобретение формирует набор мер расстояния между оценками основного тона первого сигнала и оценками основного тона второго сигнала с заранее заданными задержками по отношению к первому сигналу. Из этого набора выбирают значение меры расстояния, соответствующее наибольшему сходству между первым и вторым сигналами. Если выбранная мера расстояния имеет некоторое отношение к пороговой величине сходства, второй сигнал классифицируется в качестве включающего в себя эхосигнал от первого сигнала. Если эхосигнал был обнаружен, задержка, соответствующая выбранной мере расстояния, может использоваться в качестве оценки задержки эхосигнала.
КРАТКОЕ ОПИСАНИЕ ФИГУР ЧЕРТЕЖЕЙ
Изобретение вместе с дополнительными задачами и преимуществами такового может быть наилучшим образом понято путем выполнения ссылки на нижеследующее описание, рассматриваемое вместе с сопроводительными чертежами, на которых:
фиг.1 - блок-схема, в общем виде иллюстрирующая формирование и обнаружение эхосигнала;
фиг.2 - блок-схема варианта осуществления устройства обнаружения сходства в соответствии с настоящим изобретением;
фиг.3 - блок-схема варианта осуществления устройства обнаружения эхосигнала в соответствии с настоящим изобретением;
фиг.4 - иллюстрация схемы последовательности операций для варианта осуществления способа обнаружения эхосигнала в соответствии с настоящим изобретением;
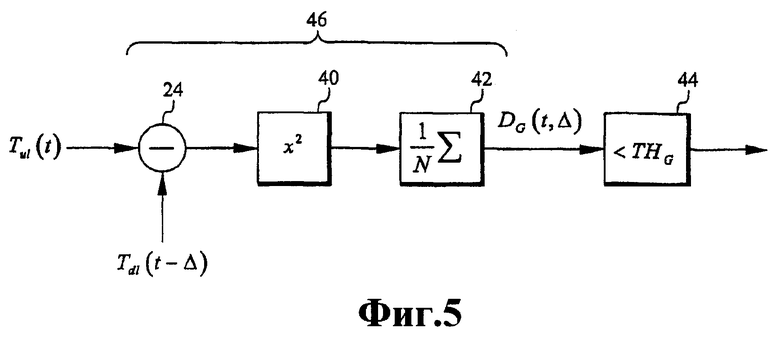
фиг.5 - блок-схема другого варианта осуществления устройства обнаружения сходства в соответствии с настоящим изобретением;
фиг.6 - блок-схема другого варианта осуществления устройства обнаружения эхосигнала в соответствии с настоящим изобретением; и
фиг.7 - блок-схема следующего варианта осуществления устройства обнаружения эхосигнала в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В нижеследующем описании элементы, выполняющие одинаковые или сходные функции, снабжены одинаковыми ссылочными обозначениями.
Чтобы выявить эхосигнал, который является отражением сигнала, требуется мера сходства между сигналами восходящей линии связи и нисходящей линии связи. Тракт прохождения эха для эхосигнала, сформированного мобильными телефонными трубками, является нелинейным и непостоянным, что затрудняет использование традиционных мер определения сходства, применяемых непосредственно к форме сигналов.
В нижеследующем описании в качестве примера будет использоваться речевой кодек AMR (адаптивный многоскоростной кодек) для Глобальной системы мобильной связи (ГСМС, GSM), но аналогичное рассуждение является применимым для многих других речевых кодеков, в частности таковых на основе технологии линейного прогнозирования с кодовым возбуждением (ЛПКВ, CELP). AMR-кодек действует на кадрах в 20 мс (160 выборок), которые разделены на четыре подкадра 5 мс (40 выборок). Параметрами, доступными в AMR-кодированном потоке двоичных сигналов, являются векторы LSP (пары спектральных линий), долевые запаздывания основного тона (тоновый интервал), новые кодовые векторы, коэффициенты усиления основного тона и новые [6] коэффициенты усиления. Согласно настоящему изобретению тоновый интервал является параметром по выбору для обнаружения эхосигнала. Полагается, что тоновый интервал или основная (собственная) частота речевого сигнала имеет более высокую вероятность, чтобы пройти неизвестную нелинейную систему без изменений или с небольшой модификацией, чем другие параметры, используемые для представления речи в AMR-кодеке. Интуитивно-понятная причина для такого заключения состоит в том, что нелинейная система будет, вероятно, формировать гармоники, но она не будет изменять основную частоту гармонического сигнала, пропуская его. Кроме того, в системах радиосвязи тоновый интервал часто защищен посредством канального кодирования.
Можно обозначить через Tul(t) тоновый интервал восходящей линии связи (см. фиг.1) для подкадра t и обозначить через Tdl(t-Δ) тоновый интервал нисходящей линии связи для подкадра t-Δ. Тоновый интервал восходящей линии связи будет обрабатываться как случайная переменная согласно вкладу ошибок измерений и вкладам от истинного сигнала со стороны устройства мобильной связи.
Можно обозначить разность между тоновыми интервалами восходящей линии связи и нисходящей линии связи согласно:
W(t,Δ)=Tul(t)-Tdl(t-Δ) (1)
При таких определениях теперь является возможным использовать методику проверки гипотез. Таким образом, установить нижеследующие гипотезы:
H1: сигнал восходящей линии связи содержит эхосигнал, как обозначено сходством интервалов основного тона для восходящей линии связи и нисходящей линии связи.
H0: эхосигнал не присутствует, и тоновый интервал восходящей линии связи формируется только на основании сигналов, присутствующих на стороне мобильного устройства.
Согласно гипотезе H1 процесс w(t,Δ) моделирует ошибки оценки основного тона в речевом кодеке, постоянно находящемся в телефоне мобильной связи, а также вклад от истинного сигнала мобильной связи. Имитационные модели выявили, что распределение ошибок оценки может быть приближенно выражено согласно распределению Лапласа и что вклад от ближнего конца линии связи задает равномерный предел (минимальный уровень) по отношению к функции распределения. Таким образом принимается, что согласно гипотезе H1 функция распределения w(t,Δ) задается согласно

где:
β - конструктивный параметр (обычно находящийся между 0,1 и 0,3), который может использоваться для веса компонентов распределений Лапласа и равномерного распределения;
δ - параметр (обычно находящийся между 1 и 3) распределения Лапласа;
a, b - переменные, определенные согласно пределам, в которых тоновые интервалы могут быть представлены в речевом кодеке. В режиме 12,2 кбит/с AMR-кодека тоновый интервал изменяется от 18 до 143, и в других режимах изменяется от 20 до 143. Это дает a=-125, b=125 в режиме 12,2 кбит/с и a=-123, b=123 во всех других режимах;
α - константа нормализации функции плотности распределения вероятности так, что она интегрируется в единицу. Эту константу получают путем решения

Уравнение (2) может быть переписано в более удобной форме для дальнейшего вывода
Согласно гипотезе H0 полагается, что распределение w(t,Δ) будет равномерным в пределах отрезка [a,b], то есть
Полагается, что значения, принимаемые случайными процессами w(t,Δ) в различные моменты времени, являются статистически независимыми. Тогда плотность совместного распределения вероятности для N таких плотностей (соответствующим N подкадрам; обычно N находится около 100 или больше) является произведением отдельных плотностей

Теперь может быть разработан критерий отношения правдоподобия, см. [7], для упомянутых выше гипотез H0 и H1. Полагается, что обе гипотезы имеют равные априорные вероятности. Тогда критерий задается согласно

Взятие логарифма и упрощение (8) дают нижеследующий критерий

Обращается внимание, что правая сторона (9) включает в себя только известные константы. Таким образом она может быть представлена посредством пороговой величины

Подобным образом второй параметр функции минимума в (9) может быть представлен посредством ограничительной константы

Таким образом (9) может быть записано (с использованием определения w(t,Δ)) в виде

Расстояние D(Δ) представляет меру присутствия/отсутствия эхосигнала, имеющего задержку Δ. Чем более D(Δ) превышает пороговую величину TH, тем более достоверным становится присутствие эхосигнала с задержкой Δ (гипотеза H1). Однако должно быть отмечено, что D(Δ) представляет только меру присутствия/отсутствия эхосигнала в конкретный момент времени. Общее выражение, соответствующее (12) для произвольного момента t времени

Уравнение (13) теперь может использоваться в качестве основы устройства определения задержки эхосигнала, которое выявляет присутствие/отсутствие эхосигнала с наличием задержки Δ. Устройство определения должно вычислять абсолютное расстояние между тоновыми интервалами для восходящей линии связи и нисходящей линии связи для задержки Δ, ограничивать (задавать пределы) абсолютные расстояния, чтобы они были меньше LIM, суммировать результаты для всех N моментов времени и сравнивать сумму с пороговой величиной TH. Структура такого устройства определения показана на фиг.2. Устройство определения включает в себя блок 24 вычитания, принимающий основной тон Tul(t) восходящей линии связи и задержанный основной тон Tdl(t-Δ) нисходящей линии связи. Расстояние или разность сигналов w(t,Δ) пересылается на блок 26 абсолютного значения, соединенный с ограничителем 28 и блоком 30 суммирования, в котором N последних результатов накапливаются и делятся на N. Затем сумма пересылается на классификатор или компаратор 32, в котором она сравнивается с пороговой величиной TH. Если пороговая величина превышена, гипотезу H1 считают действительной, то есть был обнаружен эхосигнал с задержкой Δ, иначе гипотезу H0 считают действительной, то есть эхосигнал не присутствует.
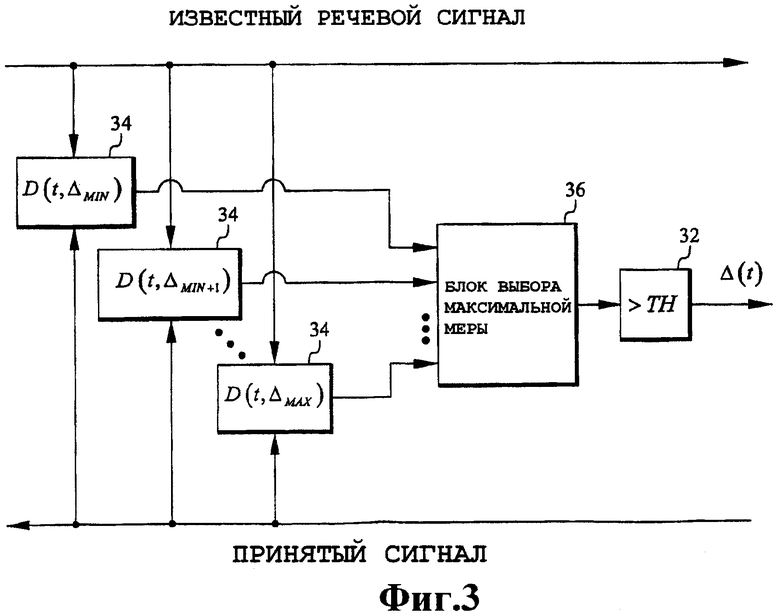
На фиг.2 показана схема обнаружения для одиночного канала задержки, имеющего задержку Δ. Чтобы иметь возможность выявлять эхосигнал с неизвестной задержкой и оценивать задержку, требуется реализация нескольких каналов задержки, действующих параллельно, как показано на фиг.3. Задержка эхосигнала соответствует задержке Δ с наибольшим соответствующим значением меры D(t,Δ) расстояния. На фиг.3 ряд устройств 34 обнаружения сходства сигналов, которые могут иметь структуру по фиг.2, определяют значения мер D(t,ΔMIN), D(t,ΔMIN+1),..., D(t,ΔMAX) расстояния для ряда задержек ΔMIN, ΔMIN+1,…, ΔMAX. Задержки зависят от приложения (где, как ожидается, будет находиться эхосигнал). Для обнаружения эхосигнала мобильной связи в системе GSM ΔMIN находится в интервале 100-160 мс и ΔMAX находится в интервале 300-360 мс. Блок 36 выбора выбирает задержку Δ(t), соответствующую наибольшему значению меры D(t,Δ) расстояния, и классификатор 32 выводит соответствующую задержку Δ(t), если выбранное значение меры расстояния превышает пороговую величину TH. Если оно не превышает пороговую величину, что указывает отсутствие эхосигнала, то формируется "фиктивное" значение, например 0.
В альтернативном варианте осуществления устройство обнаружения эхосигнала может быть реализовано с применением текущего значения суммы, то есть во время t вычисляется нижеследующее значение меры расстояния для каждой из представляющих интерес задержек, и оно сравнивается с нулем

где TH и LIM соответствуют константам в (13), и λ является весовым коэффициентом, используемым, чтобы "забыть" (игнорировать) старшие вклады в D(t,Δ). Например, подходящими значениями для констант являются TH=7 (TH обычно находится в закрытом интервале [4,7, 10,9]) и LIM=9 (LIM обычно находится в закрытом интервале [7,1, 18,0]). Весовой коэффициент λ обычно находится в закрытом интервале [0,9, 0,99]. Обратите внимание, что, поскольку абсолютное расстояние тонового интервала представлено в (14) со знаком "минус", большее значение меры расстояния подразумевает, что имеется сходство между сигналами восходящей линии связи и нисходящей линии связи, и наоборот, малое значение меры расстояния указывает, что сходство не было установлено. Эхосигнал обнаружен, если какое-либо значение меры расстояния превышает нулевой уровень. Задержка эхосигнала соответствует значению Δ, имеющему наибольшее соответствующее значение меры D(t,Δ) расстояния, которое превышает нуль.
На фиг.4 показана схема последовательности действий, иллюстрирующая вариант осуществления способа определения задержки эхосигнала в соответствии с настоящим изобретением. В конкретный момент t времени этап S1 определяет Tul(t-m) и Tdl(t-m-Δ) для возможных значений m и m-Δ. Обычно предыдущие значения хранятся в буферных запоминающих устройствах. На этапе S2 определяют значения меры D(t,Δ) расстояния для каждой задержки Δ в соответствии с (13). На этапе S3 выбирается наибольшее значение D(t,Δ). На этапе S4 проверяется, превышает ли выбранное значение меры расстояния пороговую величину TH. Если превышает, на этапе S5 выводится задержка Δ, соответствующая выбранному значению меры D(t,Δ) расстояния. Иначе на этапе S6 выводится значение, представляющее "отсутствие эхосигнала", например значение 0.
Следует отметить, что конкретный способ вычисления значения меры D(t,Δ) расстояния между тоновыми интервалами для восходящей линии связи и нисходящей линии связи не является критичным для настоящего изобретения. Другой вариант осуществления изобретения предназначен для моделирования распределения ошибок w(t,Δ) оценки в виде гауссиана вместо лапласиана. В этом случае представленный выше подобный вывод будет вести к квадратичной мере расстояния в противоположность вышеуказанной усеченной абсолютной мере расстояния.
Согласно этому варианту осуществления расстояние между тоновыми интервалами для сигналов восходящей линии связи и нисходящей линии связи вычисляется для различных задержек Δ сигнала с использованием прямоугольного окна из N подкадров (например, N=16) в виде

Если минимальное значение  меньше заранее заданной пороговой величины THG (например, 10), то обнаружено присутствие эхосигнала, и задержка сигнала может быть установлена, исходя из задержки, соответствующей минимальному значению DG(t,Δ). На фиг.5 и 6 иллюстрируется этот вариант осуществления. На фиг.5 блок 40 возведения в квадрат возводит в квадрат разность между основным тоном Tul(t) восходящей линии связи и задержанным основным тоном Tdl(t-Δ) нисходящей линии связи. Эти квадраты накапливаются в блоке 42 суммирования, и результирующая сумма DG(t,Δ) пересылается на классификатор или компаратор 44, который сравнивает ее с пороговой величиной THG (THG обычно находится в закрытом интервале [8,12]). Если пороговая величина превышена, то эхосигнал не присутствует, в противном случае был обнаружен эхосигнал.
меньше заранее заданной пороговой величины THG (например, 10), то обнаружено присутствие эхосигнала, и задержка сигнала может быть установлена, исходя из задержки, соответствующей минимальному значению DG(t,Δ). На фиг.5 и 6 иллюстрируется этот вариант осуществления. На фиг.5 блок 40 возведения в квадрат возводит в квадрат разность между основным тоном Tul(t) восходящей линии связи и задержанным основным тоном Tdl(t-Δ) нисходящей линии связи. Эти квадраты накапливаются в блоке 42 суммирования, и результирующая сумма DG(t,Δ) пересылается на классификатор или компаратор 44, который сравнивает ее с пороговой величиной THG (THG обычно находится в закрытом интервале [8,12]). Если пороговая величина превышена, то эхосигнал не присутствует, в противном случае был обнаружен эхосигнал.
В варианте осуществления, проиллюстрированном на фиг.6, ряд устройств 46 обнаружения сходства сигналов, которые могут иметь структуру, проиллюстрированную на фиг.5, определяют значения меры DG(t,ΔMIN), DG(t,ΔMIN+1),..., DG(t,ΔMAX) расстояния для набора заранее заданных задержек ΔMIN, ΔMIN+1,…, ΔMAX. Блок 48 выбора выбирает наименьшее значение меры DG(t,Δ) расстояния, и классификатор 44 выводит соответствующую задержку Δ(t), если выбранное значение меры расстояния не превышает пороговую величину THG. Если оно превышает пороговую величину, что указывает, что эхосигнал не присутствует, формируется "фиктивное" значение, например 0.
В альтернативном варианте осуществления в соответствии с уравнением (14) исполнение гауссиана может быть реализовано в виде

Следующий вариант осуществления изобретения предназначен для моделирования распределения ошибок w(t,Δ) оценки в виде альфа-стабильного распределения Леви, см. [8]. Важные характеристики подходящего распределения состоят в том, что оно должно быть симметрическим относительно нуля и что оно должно иметь довольно узкий максимум.
Даже при том, что изобретение особенно полезно, если речевые сигналы являются кодированными (для передачи используются TrFO или TFO), оно также может обрабатывать экземпляр некодированных сигналов, например, в определенном сектором (ITU-T) телекоммуникаций Международного союза электросвязи формате G.711 кодека А-типа или мю-типа. В этом случае к устройству обнаружения необходимо добавить блоки оценки основного тона известного речевого сигнала и принятого сигнала. Подходящий блок оценки основного тона описан, например, в [6]. Эта конфигурация показана на фиг.7. В этом варианте осуществления блоки 50 оценки основного тона были вставлены между известным и принятым сигналами и устройством обнаружения эхосигнала по фиг.3.
В описанных выше вариантах осуществления выбиралась одна мера расстояния и затем сравнивалась с пороговой величиной. Однако другой возможностью является сравнение сначала каждого значения меры расстояния с пороговой величиной и затем выбор одной меры (максимальной или минимальной, в зависимости от исполнения) из набора мер, которые прошли сравнение с пороговой величиной.
Имеются несколько практических аспектов, которые могут быть добавлены к основным структурам устройства обнаружения, полученным выше:
- Речевые сигналы являются непостоянными, и нет никакого смысла в работе устройства обнаружения эхосигнала, если речь в нисходящей линии связи отсутствует или слишком тиха для создания какого-либо эхосигнала. В практическом осуществлении мера расстояния может обновляться, только если мощность сигнала нисходящей линии связи выше -40 мВт логарифмических единиц мощности, например.
- Подобным образом может иметься порог усиления основного тона нисходящей линии связи. Для AMR-кодека пороговая величина может быть установлена в 10000, например.
- Обнаружение может выполняться только на "хороших" кадрах восходящей линии связи, то есть кадрах SID (описатель вставки пауз), и поврежденные кадры могут быть исключены.
- Чтобы позволять быстрое обнаружение паразитной пачки эхосигналов, меры расстояния могут быть предельными, например, в -200, то есть всегда имеется D(t,Δ)≥-200.
Является хорошо известным фактом, что наиболее обычная ошибка в оценке основного тона приводит к удвоенному фактическому интервалу основного тона. Эта возможность может применяться, чтобы расширить устройство обнаружения эхосигнала. В конкретной реализации уравнения (14) она может учитываться путем добавления к исходному устройству обнаружения устройства обнаружения, где тоновый интервал нисходящей линии связи сравнивается с половиной тонового интервала восходящей линии связи. Например, уравнение (14) может быть модифицировано в

где λ2, TH2, LIM2 соответствуют λ, TH, LIM в уравнении (14), но могут иметь другие значения. Поскольку теперь рассматривается канал, связанный с наиболее вероятными ошибками оценки основного тона, допущенными кодером в телефоне мобильной связи, целесообразно выбирать константы TH2, LIM2 меньше TH, LIM в (14). Например, подходящими значениями для констант является TH2=4 (TH2 обычно находится в интервале [3, 5]) и LIM2=6 (LIM2 обычно находится в интервале [5, 7]). Обычно λ2=λ, чтобы задать то же "число элементов памяти", но это не является строго необходимым. В проиллюстративном варианте осуществления только одно из обновлений, заданных согласно (14) и (17), используется в каждый момент t. Это демонстрируется посредством нижеследующего псевдокода:

то обновить в D(t,Δ) с использованием (14),
иначе обновить в D(t,Δ) с использованием (17).
Другие вероятные ошибки оценки основного тона, такие как половина фактического основного тона, могут обрабатываться подобным образом.
Функциональные возможности различных блоков из устройства обнаружения сходства сигналов и эхосигнала обычно осуществляются посредством одного или нескольких микропроцессоров или комбинаций микропроцессора/процессора сигналов и соответствующего программного обеспечения.
Хотя настоящее изобретение было описано со ссылкой на обнаружение эхосигнала, которое подразумевает некоторую задержку между связанными сигналами, понятно, что те же принципы могут фактически использоваться для определения сходства между двумя обычными сигналами (со взаимными задержками или без них).
Кроме того, хотя настоящее изобретение было описано со ссылкой на речевые сигналы, понятно, что те же принципы являются применимыми к более общим звуковым сигналам, имеющим гармоническое содержимое, например, музыкальное. Фактически те же принципы являются применимыми к любому виду сигналов, которые могут частично определяться посредством оценки основного тона.
Описанное изобретение имеет несколько преимуществ:
- Оно позволяет быстрое обнаружение и оценку задержки задержанной и возможно искаженной копии известного речевого или звукового сигнала в смеси из нескольких речевых и/или звуковых сигналов и шума. Например, оно позволяет быстрое обнаружение и оценку задержки эхосигнала мобильной связи.
- Оно способно обрабатывать нелинейные тракты прохождения эхосигнала.
- Оно способно обрабатывать кодированную речь (требуется только извлечение тонового интервала).
Специалистам в данной области техники будет понятно, что могут быть выполнены различные модификации и изменения по отношению к настоящему изобретению без выхода за рамки его объема, который определен в соответствии с прилагаемой формулой изобретения.
ССЫЛОЧНЫЕ МАТЕРИАЛЫ
[1] ITU-T Recommendation G.131, Control of talker echo (Рекомендация G.131 ITU-T, Управление эхосигналом от говорящего абонента).
[2] A. Eriksson et al., Mobile Crosstalk Control - Enhancing speech quality in mobile systems, Ericsson Review 1998, No. 2.A. (Eriksson и другие. Контроль перекрестных помех мобильной связи - Расширение качества речи в системах мобильной связи).
[3] Патент США 6771779, Reducing acoustic crosstalk in multi-microphone conference system by inverting estimated crosstalk matrix for filtering (Уменьшение акустических перекрестных помех в системе многомикрофонной конференц-связи путем инвертирования матрицы оценок перекрестных помех для фильтрации).
[4] Патент США 6256384, Method and apparatus for cancelling echo originating from a mobile terminal (Способ и устройство компенсации эхосигнала, происходящего от терминала мобильной связи).
[5] Патент США 6466666, Echo power estimation method for telephony system (способ оценки мощности эхосигнала для системы телефонной связи).
[6] 3GPP TS 26.090 V6.0.0 (2004-12) 3rd Generation Partnership Project; Technical Specification Group Services and System Aspects; Mandatory Speech Codec speech processing functions; Adaptive Multi-Rate (AMR) speech codec; Transcoding functions (Release 6) (Технические условия TS 26.090 Проекта партнерства систем связи 3-го поколения, версия V6.0,0 (2004-12); Технические условия групповых услуг и системные аспекты; Обязательные функции обработки речевого кодека и речи; Адаптивный многоскоростной речевой кодек (AMR); Функции транскодирования (Версия 6).
[7] L. Van Trees, Detection, Estimation, and Modulation Theory, Wiley&Sons, 1971, pp. 19-33 (Теория обнаружения, оценки и модуляции сигналов).
[8] Wikipedia, http://answers.com/topic/l-vy-distribution.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРОЖДЕНИЕ ШИФРОВАЛЬНЫХ КЛЮЧЕЙ В СЕТЯХ РАДИОСВЯЗИ | 1996 |
|
RU2187897C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СГЛАЖИВАНИЕМ СТАЦИОНАРНОГО ФОНОВОГО ШУМА | 2008 |
|
RU2469419C2 |
| СПОСОБ ПОДАВЛЕНИЯ ЭХО-СИГНАЛОВ АДАПТИВНЫМ ДВОЙНЫМ ФИЛЬТРОМ | 1996 |
|
RU2175814C2 |
| ОБНАРУЖЕНИЕ АКТИВНОСТИ СЛОЖНОГО СИГНАЛА ДЛЯ УСОВЕРШЕНСТВОВАННОЙ КЛАССИФИКАЦИИ РЕЧИ/ШУМА В АУДИОСИГНАЛЕ | 1999 |
|
RU2251750C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ОБЪЕКТА И ГИДРОЛОКАТОРОМ | 2013 |
|
RU2527136C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ВЕРТОЛЕТА С ИСПОЛЬЗОВАНИЕМ РАДИОЛОКАТОРА | 2003 |
|
RU2260815C2 |
| СПОСОБ ПОСЛЕДУЮЩЕЙ ОБРАБОТКИ С ВЫСОКОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТЬЮ ДЛЯ РЕЧЕВОГО ДЕКОДЕРА | 1998 |
|
RU2199157C2 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ХАРАКТЕРИСТИК ОБЪЕКТА | 2014 |
|
RU2570100C1 |
| УСТРОЙСТВО МНОГОКАНАЛЬНОЙ АДАПТИВНОЙ КОМПЕНСАЦИИ ЭХО-СИГНАЛОВ | 2019 |
|
RU2722220C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2673562C2 |




Изобретение может быть использовано для обнаружения эхосигналов при контроле эхосигналов, накоплении сетевой статистики и в многосторонних коммутаторах конфренц-связи. Способ обнаружения эхосигнала заключается в формировании набора значений мер расстояния между оценками основного тона первого сигнала и оценками основного тона второго сигнала с заранее заданными задержками по отношению к упомянутому первому сигналу путем использования гипотез, где полагается, что разности между оценками основного тона упомянутого первого сигнала и оценками основного тона упомянутого второго сигнала являются случайными процессами, которые следуют первому заранее заданному статистическому распределению при присутствии эхосигнала и второму заранее заданному статистическому распределению при отсутствии эхосигнала. Из упомянутого набора выбирают меру расстояния, соответствующую наибольшему сходству между упомянутыми первым и вторым сигналами. Упомянутый второй сигнал классифицируют как включающий в себя эхосигнал от упомянутого первого сигнала, если выбранная мера расстояния имеет заранее заданную взаимосвязь с заранее заданной пороговой величине. Технический результат - увеличение скорости обнаружения и оценки задержки задержанной и возможно искаженной копии известного речевого или звукового сигнала в смеси с шумом. 4 н. и 22 з.п. ф-лы, 7 ил.
1. Способ обнаружения эхосигнала, включающий в себя этапы, на которых
формируют набор мер расстояния между оценками основного тона первого сигнала и оценками основного тона второго сигнала с заранее заданными задержками по отношению к упомянутому первому сигналу путем использования гипотез, где полагается, что разности между оценками основного тона упомянутого первого сигнала и оценками основного тона упомянутого второго сигнала являются случайными процессами, которые следуют первому заранее заданному статистическому распределению при присутствии эхосигнала и второму заранее заданному статистическому распределению при отсутствии эхосигнала;
выбирают меру расстояния из упомянутого набора, соответствующую наибольшему сходству между упомянутыми первым и вторым сигналами;
классифицируют упомянутый второй сигнал как включающий в себя эхосигнал от упомянутого первого сигнала, если выбранная мера расстояния имеет заранее заданную взаимосвязь с заранее заданной пороговой величиной сходства.
2. Способ по п.1, включающий в себя этап, на котором указывают задержку, соответствующую выбранной мере расстояния, если упомянутый второй сигнал был классифицирован как включающий в себя эхосигнал.
3. Способ по п.1 или 2, в котором упомянутым первым заранее заданным статистическим распределением является распределение Лапласа в комбинации с равномерным пределом.
4. Способ по п.1 или 2, в котором упомянутым первым заранее заданным статистическим распределением является распределение Гаусса.
5. Способ по п.1 или 2, в котором упомянутым первым заранее заданным статистическим распределением является альфа-стабильное распределение Леви.
6. Способ по п.1 или 2, в котором упомянутым вторым заранее заданным статистическим распределением является равномерное распределение.
7. Способ по п.1 или 2, в котором мера D(t,Δ) расстояния, ассоциированная с моментом t и задержкой Δ, пропорциональна следующему:

где Tul является оценкой основного тона упомянутого первого сигнала,
Tdl является оценкой основного тона упомянутого второго сигнала,
LIM является предельным значением,
N является числом соответствующих оценок основного тона, включенных в меры расстояния.
8. Способ по п.1 или 2, в котором мера D(t,Δ) расстояния, ассоциированная с моментом t и задержкой Δ, пропорциональна следующему:

где Tul является оценкой основного тона упомянутого первого сигнала,
Tdl является оценкой основного тона упомянутого второго сигнала,
LIM является предельным значением,
ТН является заранее заданной константой,
λ является заранее заданным весовым коэффициентом.
9. Способ по п.1 или 2, в котором мера расстояния DG(t,Δ), ассоциированная с моментом t и задержкой Δ, пропорциональна следующему:

где Tul является оценкой основного тона упомянутого первого сигнала,
Tdl является оценкой основного тона упомянутого второго сигнала,
N является числом соответствующих оценок основного тона, включенных в значение меры расстояния.
10. Способ по п.1 или 2, в котором мера расстояния DG(t,Δ), ассоциированная с моментом t и задержкой Δ, пропорциональна следующему:

где Tul является оценкой основного тона упомянутого первого сигнала,
Tdl является оценкой основного тона упомянутого второго сигнала,
THG является заранее заданной константой,
λ является заранее заданным весовым коэффициентом.
11. Способ по п.1 или 2, включающий в себя этап получения упомянутых оценок основного тона из кодированных двоичных потоков.
12. Способ по п.1 или 2, включающий в себя этап получения упомянутых оценок основного тона из некодированных потоков данных.
13. Способ определения сходства между первым сигналом и вторым сигналом, включающий в себя этап формирования меры расстояния между оценками основного тона упомянутого первого сигнала и оценками основного тона упомянутого второго сигнала путем использования гипотез, где разности между оценками основного тона упомянутого первого сигнала и оценками основного тона упомянутого второго сигнала полагаются случайными процессами, которые следуют первому заранее заданному статистическому распределению, если упомянутые сигналы являются сходными, и второму заранее заданному статистическому распределению, если они не являются сходными.
14. Способ по п.13, в котором упомянутым первым заранее заданным статистическим распределением является распределение Лапласа в комбинации с равномерным пределом.
15. Способ по п.13, в котором упомянутым первым заранее заданным статистическим распределением является распределение Гаусса.
16. Способ по п.13, в котором упомянутым первым заранее заданным статистическим распределением является альфа-стабильное распределение Леви.
17. Способ по любому из предшествующих пп.13-16, в котором упомянутым вторым заранее заданным статистическим распределением является равномерное распределение.
18. Способ по п.13 или 14, в котором мера D(t,Δ) расстояния, ассоциированная с моментом t и задержкой Δ, пропорциональна следующему:

где Tul является оценкой основного тона упомянутого первого сигнала,
Tdl является оценкой основного тона упомянутого второго сигнала,
LIM является предельным значением,
N является числом соответствующих оценок основного тона, включенных в значение меры расстояния.
19. Способ по п.13 или 14, в котором мера D(t,Δ) расстояния, ассоциированная с моментом t и задержкой Δ, пропорциональна следующему:

где Tul является оценкой основного тона упомянутого первого сигнала,
Tdl является оценкой основного тона упомянутого второго сигнала,
LIM является предельным значением,
ТН является заранее заданной константой,
λ является заранее заданным весовым коэффициентом.
20. Способ по п.13 или 15, в котором мера DG(t,Δ) расстояния, ассоциированная с моментом t и задержкой Δ, пропорциональна следующему:

где Tul является оценкой основного тона упомянутого первого сигнала,
Tdl является оценкой основного тона упомянутого второго сигнала,
N является числом соответствующих оценок основного тона, включенных в значение меры расстояния.
21. Способ по п.13 или 15, в котором мера DG(t,Δ) расстояния,
ассоциированная с моментом t и задержкой Δ, пропорциональна следующему

где Tul является оценкой основного тона упомянутого первого сигнала,
Tdl является оценкой основного тона упомянутого второго сигнала,
THG является заранее заданной константой,
λ является заранее заданным весовым коэффициентом.
22. Способ по любому из пп.13-16, включающий в себя этап получения упомянутой оценки основного тона из кодированных двоичных потоков.
23. Способ по любому из пп.13-16, включающий в себя этап получения упомянутой оценки основного тона из некодированных потоков данных.
24. Устройство обнаружения эхосигнала, включающее в себя средство (34, 46) для формирования мер расстояния между оценками основного тона первого сигнала и оценками основного тона второго сигнала с заранее заданными задержками по отношению к упомянутому первому сигналу, упомянутое средство (34, 46) выполнено с возможностью использования гипотез, где полагается, что разности между оценками основного тона упомянутого первого сигнала и оценками основного тона упомянутого второго сигнала являются случайными процессами, которые следуют первому заранее заданному статистическому распределению, если эхосигнал присутствует, и второму заранее заданному статистическому распределению, если эхосигнал не присутствует;
блок (36, 48) выбора для выбора меры расстояния из упомянутого набора, соответствующей наибольшему сходству между упомянутыми первым и вторым сигналами;
классификатор (32, 44) для классификации упомянутого второго сигнала как включающего в себя эхосигнал от упомянутого первого сигнала, если выбранная мера расстояния имеет заранее заданную взаимосвязь с заранее заданной пороговой величиной (ТН, THG) сходства.
25. Устройство обнаружения эхосигнала по п.24, в котором упомянутый классификатор (32, 44) выполнен с возможностью указания задержки, соответствующей упомянутой выбранной мере расстояния, если упомянутый второй сигнал был классифицирован как включающий в себя эхосигнал.
26. Устройство для определения сходства между первым сигналом и вторым сигналом, включающее в себя средство (34, 46) для формирования значения меры расстояния между оценками основного тона упомянутого первого сигнала и оценками основного тона упомянутого второго сигнала, упомянутое средство (34, 46) выполнено с возможностью использования гипотезы, где полагается, что разности между оценками основного тона упомянутого первого сигнала и оценками основного тона упомянутого второго сигнала являются случайными процессами, которые следуют первому заранее заданному статистическому распределению, если упомянутые сигналы являются сходными, и второму заранее заданному статистическому распределению, если они не являются сходными.
| :WO 2004021679 А2, 11.03.2004 | |||
| US 6804203 B1, 12.10.2004 | |||
| СПОСОБ ПОДАВЛЕНИЯ ШУМА ПУТЕМ СПЕКТРАЛЬНОГО ВЫЧИТАНИЯ | 1996 |
|
RU2145737C1 |
| WO 9523477 A1, 31.08.1995 | |||
| ВХОД В ПОЛЕВОЕ СООРУЖЕНИЕ | 1985 |
|
SU1301018A1 |
| WO 9523477 A1, 31.08.1995 | |||
| ВХОД В ПОЛЕВОЕ СООРУЖЕНИЕ | 1985 |
|
SU1301018A1 |

