Перекрестная ссылка на родственные заявки
Настоящая заявка испрашивает приоритет по предварительной заявке на выдачу патента США под № 61/660645, озаглавленной "Способ Уменьшения Нефизических Масс и Насыщенности в Моделировании Пласта" и поданной 15 июня 2012 года Грэхэмом Кристофером Флемингом (Graham Christopher Fleming), которая, таким образом, включена в материалы настоящей заявки посредством ссылки.
Уровень техники
Операторы месторождения нефти посвящают значительные ресурсы, чтобы улучшить отдачу углеводородов из пластов, при этом уменьшая стоимость отдачи. Для достижения этих целей инженеры-разработчики как отслеживают текущее состояние пласта, так и пытаются предсказать будущее поведение, заданное как набор текущих и/или постулированных условий. Отслеживание пласта, иногда называемое контролем параметров пласта, включает в себя регулярный сбор и текущий контроль измеренных данных из и вокруг скважин пласта. Такие данные могут включать в себя, но не ограничены этим, водонасыщенность, содержания воды и нефти, давление жидкости и скорости потока жидкости. Как только данные собраны, они архивируются в историческую базу данных.
Собранные производственные данные, однако, в основном отражают условия сразу вокруг скважин пласта. Чтобы предоставить более полную картину состояния пласта, выполняются моделирования, которые моделируют общее поведение всего пласта на основе собранных данных, как текущих, так и исторических. Эти расчеты предсказывают общее текущее состояние пласта, производя смоделированные значения данных как вблизи, так и на расстоянии от стволов скважин. Смоделированные данные вблизи ствола скважины могут быть соотнесены с измеренными данными вблизи ствола скважины, и смоделированные параметры регулируются по мере необходимости, чтобы уменьшить ошибку между смоделированными и измеренными данными. После того как отрегулированы таким образом, смоделированные данные, как вблизи, так и на расстоянии от ствола скважины, могут служить основанием для оценки общего состояния пласта. Такие данные также могут служить основанием для предсказания будущего поведения пласта на основе либо фактических, либо гипотетических условий, введенных оператором средства моделирования. Моделирования пласта, в частности те, которые выполняют полные физические численные моделирования больших пластов, требуют большого объема вычислений и могут занять несколько часов, даже дней, для выполнения.
Краткое описание чертежей
Лучшее понимание различных раскрытых вариантов осуществления может быть получено, когда последующее подробное описание рассматривается в сочетании с прилагаемыми чертежами, на которых:
Фиг. 1 показывает иллюстративный процесс моделирования.
Фиг. 2 показывает иллюстративную систему добычи углеводородов.
Фиг. 3 показывает иллюстративное применение способа Ньютона.
Фиг. 4 показывает иллюстративную выпуклую относительную кривую проницательности.
Фиг. 5A-5C показывают иллюстративные эксплуатационные скважины и компьютерную систему для управления сбором данных и добычей.
Фиг. 6 показывает иллюстративный способ системы добычи углеводородов.
Фиг. 7 показывает иллюстративный способ управления нефизическим атрибутом.
Фиг. 8 показывает иллюстративный интерфейс управления для системы добычи углеводородов на фиг. 2.
Следует понимать, что чертежи и соответствующее подробное описание не ограничивают раскрытие, но, напротив, они обеспечивают основу для понимания всех модификаций, эквивалентов и альтернатив, попадающих в объем прилагаемой формулы изобретения.
Подробное описание
В материалах настоящей заявки раскрыты способы и системы для управления появлением нефизических атрибутов во время моделирования системы добычи углеводородов. Как используется в материалах настоящей заявки, "нефизические атрибуты" относятся к отрицательным значениям для уровней насыщения, массы или других атрибутов, которые не существуют в природе. Такие нефизические атрибуты иногда вычисляются во время моделирования, которое моделирует поведение пластов, вследствие несовершенства моделей, приближений и/или уровней допуска. Система добычи углеводородов, которая моделируется, может включать в себя множество скважин, поверхностную сеть и установку. Добыча углеводородов из одного или более пластов, питающих поверхностную сеть и установку, включает в себя различные операции управления, чтобы регулировать добычу вверх или вниз. По мере того как жидкости извлекаются из пласта, оставшиеся жидкости претерпевают изменения в давлении, направлении потока и/или других атрибутах, которые оказывают влияние на будущую добычу. Раскрытые методы управления нефизическими атрибутами идентифицируют и обрабатывают появления нефизических атрибутов как часть усилий, чтобы ускорить сходимость общего решения системы добычи углеводородов. В качестве примера общее решение системы добычи углеводородов может выровнять продукцию скважины с поверхностной сетью и производственными пределами установки и регулировать продукцию скважины во времени по мере необходимости, чтобы поддержать добычу на или около производственных пределов установки.
В некоторых вариантах осуществления общее решение системы добычи углеводородов определено путем моделирования поведения компонентов системы добычи с использованием различных параметров. Более конкретно, отдельные уравнения и параметры могут быть применены для оценки поведения жидкостей в одном или более пластах, в отдельных эксплуатационных скважинах, в поверхностной сети и/или в установке. Решение таких уравнений независимо или в один момент времени дает бессвязное и, следовательно, суб-оптимальное решение (т.е. темп добычи и/или стоимость добычи в течение долгого времени являются суб-оптимальными). Напротив, решение таких уравнений совместно (называемое в материалах настоящей заявки решением полностью связанных уравнений) в несколько временных шагов включает в себя больше итераций и обработки, но дает более оптимальное решение. В альтернативных вариантах осуществления методы управления нефизическими атрибутами, описанные в материалах настоящей заявки, могут быть применены для решения уравнений пласта, независимых от общего решения системы добычи. Кроме того, в различных вариантах осуществления, уравнения пласта (относящиеся к методам управления нефизическими атрибутами) и другие уравнения системы добычи могут быть полностью связанными, слабо связанными или многократно связанными.
Системы добычи углеводородов могут быть смоделированы с использованием различных уравнений и параметров. Соответственно, должно быть понятно, что раскрытые уравнения и параметры являются лишь примерами и не предназначены для ограничения вариантов осуществления определенными уравнениями или набором уравнений. Раскрытые варианты осуществления иллюстрируют примерную стратегию управления появлениями нефизических атрибутов для ускорения сходимости уравнений, которые моделируют поведение пласта.
Более конкретно, моделирование добычи углеводородов включает в себя оценку или определение материальных компонентов пласта и их состояния (фазовые насыщения, давление, температура и т.д.). Моделирование дополнительно оценивает движение жидкостей в и из пласта, если учитываются эксплуатационные скважины Моделирование также может учитывать различные методы добычи нефти вторичным методом (EOR) (например, использование нагнетательных скважин, обработок и/или операций газлифта). Наконец, моделирование может принимать во внимание различные ограничения, которые ограничивают добычу или операции EOR. Со всеми этими различными параметрами, которые могут быть приняты во внимание моделированием, должны быть приняты управленческие решения в отношении компромисса между эффективностью моделирования и точности. Другими словами, выбор быть точным для некоторых параметров моделирования и эффективным для других параметров является важным стратегическим решением, которое оказывает влияние на издержки производства и рентабельность.
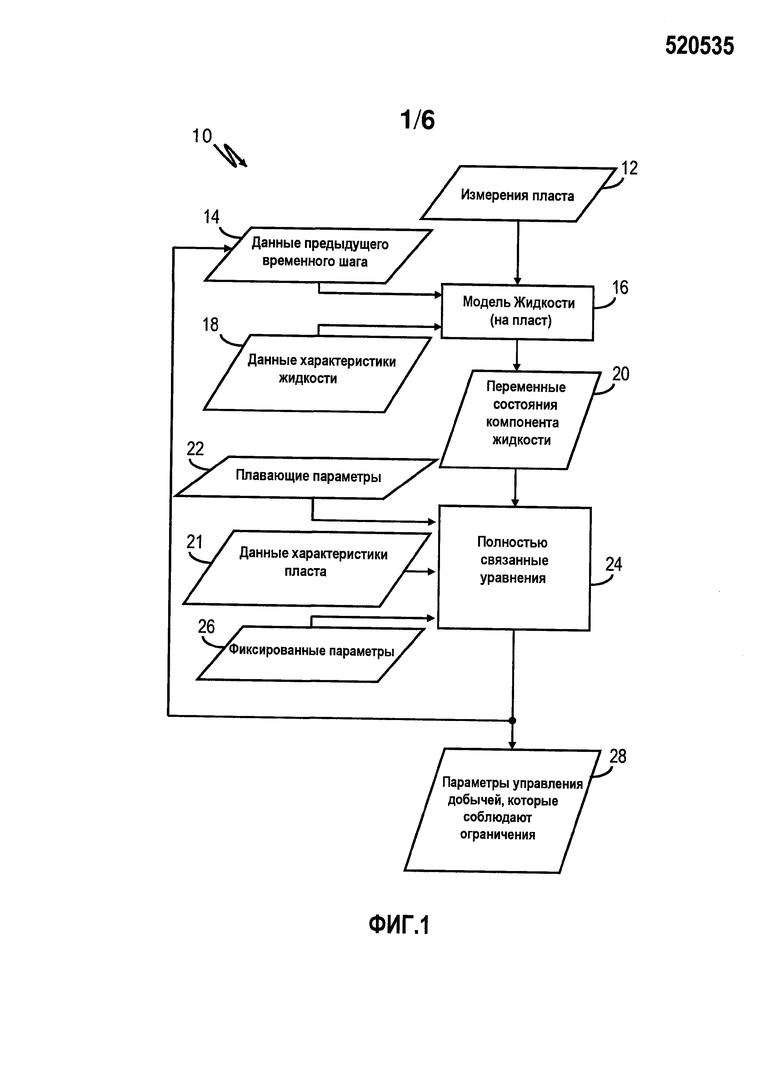
Фиг. 1 показывает иллюстративный процесс 10 моделирования для определения решения системы добычи, как описано в материалах настоящей заявки. Как показано, процесс 10 моделирования использует модель 16 жидкости для определения переменных 20 состояния компонентов жидкости, которые представляют жидкости пласта и их атрибуты. Входные данные в модель 16 жидкости могут включать в себя измерения или оценки, такие как измерения 12 пласта, данные 14 предыдущего временного шага и данные 18 характеристики жидкости. Измерения 12 пласта могут включать в себя давление, температуру, поток жидкости или другие измерения, полученные в скважине вблизи перфораций скважины, вдоль эксплуатационной обсадной колонны, у устья скважины и/или внутри поверхностной сети (например, до или после точек смешивания жидкости). Между тем, данные 14 предыдущего временного шага могут представлять обновленные температуры, давления, данные потока или другие оценки, выводимые из набора полностью связанных уравнений 24. Данные 18 характеристики жидкости могут включать в себя компоненты жидкости пласта (например, тяжелая нефть, легкая нефть, метан и т.д.) и их пропорции, плотность жидкости и вязкость для различных составов, давлений и температур или другие данные.
На основе описанных выше входных данных в модель 16 жидкости параметры и/или значения параметров определяются для каждого компонента жидкости или группы компонентов пласта. Результирующие параметры для каждого компонента/группы затем применяются к известным переменным состояния для вычисления неизвестных переменных состояния в каждой точке моделирования (например, в каждом "блоке сетки" в пласте, у перфораций скважины или "вскрытой поверхности" и/или в поверхностной сети). Эти неизвестные переменные могут включать в себя объемную долю жидкости блока сетки, газовый фактор при растворенном газе и коэффициент пластового объема, только чтобы называть несколько примеров. Результирующие переменные состояния компонентов жидкости, как измеренные, так и оцененные, предоставляются в качестве входных данных для полностью связанных уравнений 24. Как показано, полностью связанные уравнения 24 также принимают плавающие параметры 22, фиксированные параметры 26 и данные 21 характеристик пласта в качестве входных данных. Примеры плавающих параметров 22 включают в себя параметры EOR, такие как расход при нагнетании газлифта. Между тем, примеры фиксированных параметров 26 включают в себя ограничения установки (ограничение уровня добычи и ограничения газлифта) и текущие производительности для отдельных скважин. Данные 21 характеристик пласта могут включать в себя геологические данные, описывающие структуру пласта (например, каротажная диаграмма, полученная ранее во время бурения и/или перед каротажем скважины), и его характеристики (например, пористость).
Полностью связанные уравнения 24 моделируют всю систему добычи (пласт(ы), скважины и поверхностную систему) и учитывают операции EOR и ограничения установки, как описано в материалах настоящей заявки. В некоторых вариантах осуществления итерации Ньютона (или другие эффективные операции сходимости) используются для оценки значения для плавающих параметров 22, используемых для полностью связанных уравнений 24, до тех пор, пока не будет достигнуто решение системы добычи в приемлемом уровне допуска. Выходные данные решенных полностью связанных уравнений 24 включают в себя параметры 28 управления добычей (например, параметры отдельной скважины и/или рабочий параметр EOR), которые соблюдают ограничения установки и EOR. Процесс 10 моделирования может быть повторен для каждого из множества различных временных шагов, где различные значения параметров, определенные для заданного временного шага, используются для обновления моделирования для следующего временного шага. Как описано в материалах настоящей заявки, раскрытые варианты осуществления уменьшают появление нефизических атрибутов во время моделирования, чтобы ускорить решение полностью связанных уравнений 24. Примерные нефизические атрибуты включают в себя отрицательные массы и/или отрицательное насыщение, которые должны быть учтены для быстрого решения части баланса массы/объема полностью связанных уравнений 24.
По меньшей мере в некоторых вариантах осуществления параметры 28 управления добычей, выведенные из процесса 10 моделирования, позволяют выпуску продукции из скважин соответствовать производственному пределу установки. Однако, если пределы EOR превышены, выпуск продукции из скважин будет уменьшаться с течением времени, потому что они не могут быть дополнительно расширены. Как только было определено решение с приемлемым допуском, дополнительного моделирования можно избежать или уменьшить их количество, поскольку уровни добычи могут быть отрегулированы вверх или вниз по мере необходимости, чтобы соответствовать уровню добычи установки, с использованием качающихся скважин и/или доступных операций EOR. Как было отмечено ранее, процесс 10 моделирования может быть выполнен для различных временных шагов (месяцы или годы в будущем), чтобы предсказать, как поведение системы добычи углеводородов изменится с течением времени и как управлять параметрами производственного контроля.
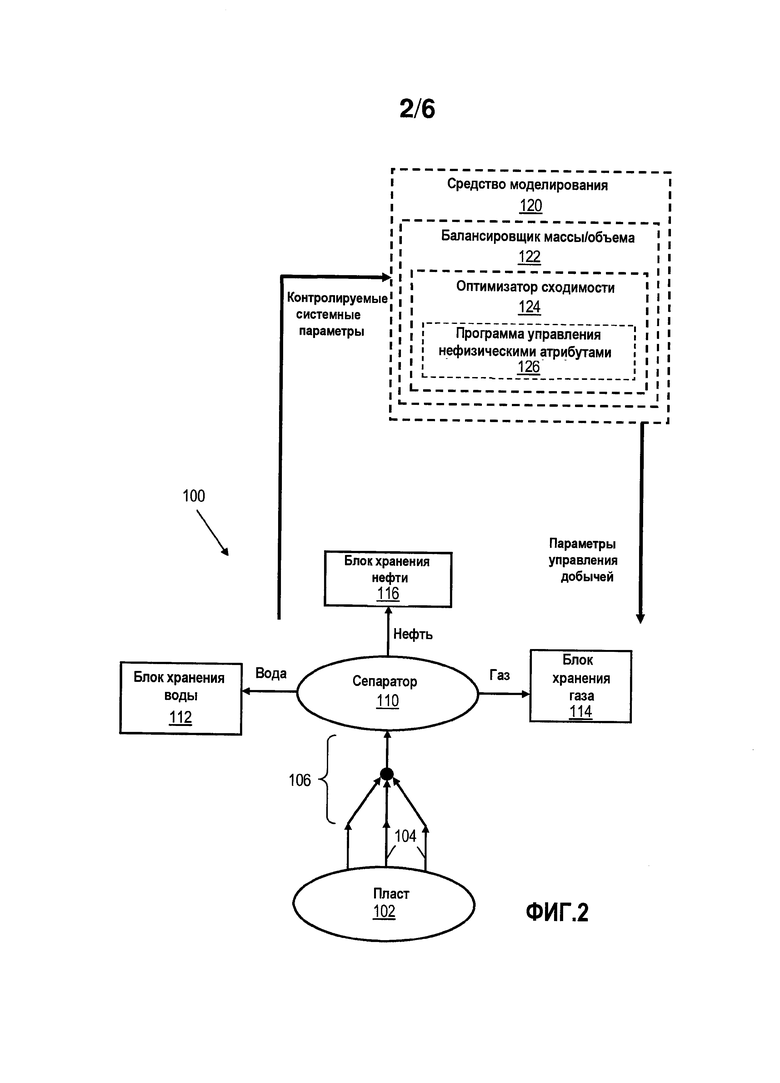
Фиг. 2 показывает иллюстративную систему 100 добычи углеводородов. Проиллюстрированная система 100 добычи углеводородов включает в себя множество скважин 104, тянущихся от пласта 102, где стрелки, представляющие скважины 104, показывают направление течения жидкости. Поверхностная сеть 106 транспортирует жидкость от скважин 104 в сепаратор 110, который направляет воду, нефть и газ в отдельные блоки 112, 114 и 116 хранения. Блок 112 хранения воды может направить собранную воду обратно в пласт 112 или куда-либо еще. Блок 114 хранения газа может направить собранный газ обратно в пласт 102, в интерфейс 118 газлифта или куда-либо еще. Блок 116 хранения нефти может направить собранную нефть на один или более нефтеперерабатывающие заводы. В различных вариантах осуществления сепаратор 110 и блоки 112, 114 и 116 хранения могут быть частью одной установки или частью нескольких установок, связанных с системой 100 добычи углеводородов. Хотя показан только один блок 116 хранения нефти, следует понимать, что может использоваться множество блоков хранения нефти в системе 100 добычи углеводородов. Подобным образом, множество блоков хранения воды и/или множество блоков хранения газа могут использоваться в системе 100 добычи углеводородов.
На фиг. 2 система 100 добычи углеводородов связана со средством 120 моделирования, соответствующим программному обеспечению, выполняемому одним или более компьютерами. Средство 120 моделирования принимает контролируемые системные параметры от различных компонентов системы 100 добычи углеводородов и определяет различные параметры управления добычей для системы 100 добычи углеводородов. В соответствии по меньшей мере с некоторыми вариантами осуществления, средство 120 моделирования выполняет операции процесса 10 моделирования, обсужденные на фиг. 1.
Как показано, средство 120 моделирования включает в себя балансировщик 122 массы/объема, который оценивает поведение жидкостей пласта и воздействие извлечения жидкости во время моделирования. Балансировщик 122 массы/объема использует оптимизатор 124 сходимости, который ускоряет сходимость решения системы добычи углеводородов. Более конкретно, оптимизатор 124 сходимости использует программу 126 управления нефизическими атрибутами для обработки появлений нефизических атрибутов (например, отрицательной массы и/или отрицательного насыщения) и для уменьшения количества появлений.
По меньшей мере, в некоторых вариантах осуществления средство 120 моделирования использует полностью скрытый способ (FIM), который использует способ Ньютона для решения нелинейной системы уравнений. Другие способы моделирования пласта также рассматриваются в материалах настоящей заявки. Например, патент США № 6662146, способы для выполнения моделирования пласта, автора Джеймса В. Воттса (James W. Watts), описывает смешанный скрытый-IMPES (Implicit Pressure Explicit Saturation, Скрытое Давление, Явное Насыщение) способ, а также способ FIM и приведен в материалах настоящей заявки посредством ссылки во всей своей полноте. В способе Ньютона функция предполагается f(x)=0 и выполняется первое допущение для решения, x0. Последующие итеративные допущения выполняются для нахождения решения с использованием уравнений:
 (1)
(1)
 (2)
(2)
Эти уравнения повторяются до тех пор, пока остаток (правая часть уравнения (1)) не находится в пределах приемлемого допуска нуля. Однако, если функция f является очень нелинейной или имеет разрывные производные, способ Ньютона может сходиться медленно или даже не сойтись. В этом случае, решение может быть ослабленным (или менее строгим), чтобы улучшить сходимость.
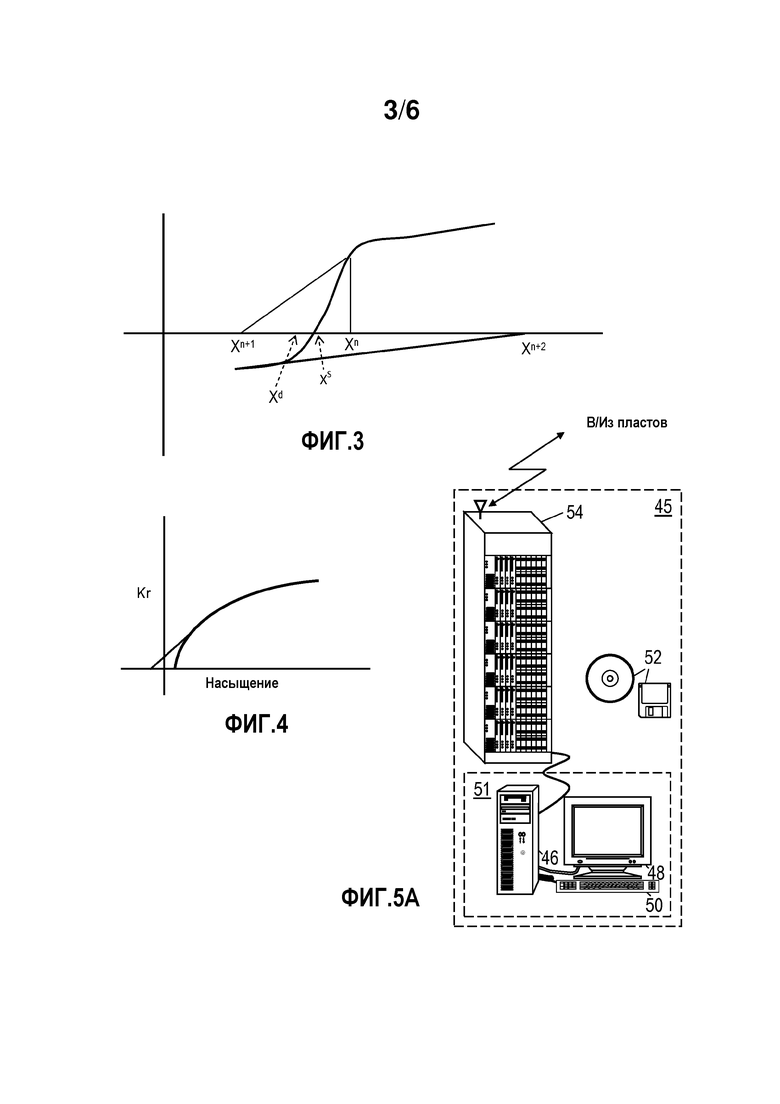
Как показано на фиг. 3, на итерации n+1 способ Ньютона вычисляет новую оценку решения xn+1, которая находится дальше от искомого решения, xs, чем значение в начале итерации, xn. Значение для следующей итерации, xn+2, переместилось бы еще дальше от желаемого решения. Для ускорения сходимости (или в некоторых случаях для избежания расхождения) итерация может быть ослаблена. Процесс ослабления включает в себя применение фактора ослабления, на который умножают вычисленное линейное изменение в решении, dxn+1. Например, если фактор ослабления 0,5 применен к примеру на фиг. 3, решение перемещается к точке xd, что было бы намного более хорошим приближением к желаемому решению.
В соответствии с вариантами осуществления, уравнения (1) и (2) расширяются, чтобы применить множество дифференциальных уравнений в частных производных для моделирования пласта. Пласт может быть дискретизирован на множество блоков сетки, и решение уравнений может быть приближено давлением и массами компонентов в каждом блоке сетки. Также могут использоваться другие независимые переменные. Уравнения для потока жидкости в пласте включают в себя много ситуаций, когда производные являются прерывистыми, что затрудняет сходимость способа Ньютона. В частности, относительные проницаемости каждой фазы становятся равными нулю при насыщении этой фазы, которая обычно больше нуля, называемом остаточным насыщением. Для насыщений ниже этого остаточного насыщения фаза не мобильна.
Для стабилизации численного решения может использоваться взвешивание вверх по потоку (иногда называемое движением против потока) подвижностей жидкостей. Поток между двумя блоками сетки, блоком i сетки и блоком j сетки зависит от разности потенциалов, ΔΦ=Φi-Φj, между двумя блоками сетки (т.е. разности в давлении плюс разности в гравитационном напоре). Для взвешивания вверх по потоку относительная проницаемость фазы оценивается в блоке сетки, где потенциал больше (т.е. блоке i сетки, если ΔΦ отрицательно). Взвешивание вверх по потоку может вызвать проблемы, если знак разности потенциалов в начале итерации отличается от знака разности потенциалов в конце итерации. Это особенно верно, если расположенный ниже по потоку блок сетки находится при или около остаточного насыщения для одной или более из фаз, а находящийся выше по потоку блок сетке - нет. В этом случае жидкость может течь из расположенного ниже по потоку блока сетки, потому что потенциал, вычисленный для итерации, изменяется на противоположный, но подвижности жидкостей, используемые для составления уравнений, были больше нуля. Результат заключается в том, что вычисленные насыщения жидкостей могут быть меньше, чем остаточные (что физически некорректно) или хуже, вычисленные массы компонентов могут быть отрицательными.
Чтобы уменьшить появление нефизических масс и насыщений, раскрытые варианты осуществления избегают отрицательных подвижностей. Более конкретно, если определено, что вычисленная подвижность для заданного компонента изменяется с положительной на отрицательную во время итерации, один или более факторы ослабления применяются по меньшей мере к некоторым из компонентов. Факторы ослабления изменяют массу каждого компонента на физическое значение, при этом поддерживая баланс объема. Если не все компоненты могут поддерживать положительную подвижность для итерации, операции управления нефизическими атрибутами отбрасывают условие баланса объема, но поддерживают неотрицательные массы.
Из-за того что одинаковый фактор ослабления не должен быть применен ко всем переменным, раскрытый метод применяет простой способ поиска лучшей начальной точки для следующей итерации, чем результат способа Ньютона. В случае разворота потока в моделировании пласта важным фактором в определении корректного направления потока является решение давления. Соответственно, раскрытый метод избегает ослабления решения давления. В некоторых вариантах осуществления во время процесса вычисления все коэффициенты для матрицы Якоби, подвижности компонентов и производные по отношению к давлению и массе компонента будут рассчитаны. В качестве примера, подвижность компонента может быть записана как mobi(p,m), где mobi представляет собой подвижность компонента i, p представляет собой давление, а m представляет собой вектор массы компонента в блоке сетки. Между тем, производные mobi(p,m) записаны как dmobi/dp and dmobi/dm. В конце итерации Ньютона подвижность компонента представляет собой:
 (3)
(3)
где  представляет собой значение подвижности для итерации n и компонента i,
представляет собой значение подвижности для итерации n и компонента i,  представляет собой линейное изменение в подвижности компонента i, вызванное изменением в давлении для итерации n+1, и
представляет собой линейное изменение в подвижности компонента i, вызванное изменением в давлении для итерации n+1, и  представляет собой сумму линейного изменения в подвижности компонента i, вызванного изменением в массе каждого компонента для итерации n+1.
представляет собой сумму линейного изменения в подвижности компонента i, вызванного изменением в массе каждого компонента для итерации n+1.
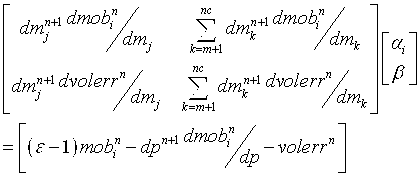
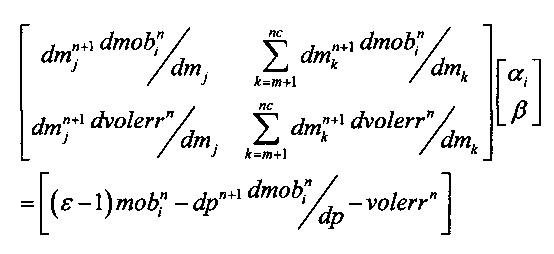
Если  меньше нуля, а больше либо равно нулю, фактор ослабления вычисляется, чтобы изменить решение для изменения массы компонента i. Однако, когда решение ослабляется, уравнение баланса объема (часть Якоби), вероятно, больше не будет выполняться. Уравнение баланса объема уравнивает объем, занятый жидкостью в блоке сетки, с объемом порового пространства блока сетки. Ошибка в балансе объема может привести к большому изменению в давлении блока сетки для следующей итерации Ньютона, поскольку жидкость пытается расшириться или сжаться, чтобы заполнить объем порового пространства. Это нежелательно, потому что это увеличивает вероятность того, что мы снова будем иметь некорректные направления жидкости. По меньшей мере в некоторых вариантах осуществления изменения массы ослабляются для компонентов, чья подвижность становится отрицательной. Также фактор ослабления вычисляется для компонентов, чья подвижность не становится отрицательной, так что баланс объема сохраняется. Поскольку баланс массы/объема представляет собой единственное уравнение, единственный фактор ослабления (больший или меньший чем 1) используется для компонентов с подвижностью, большей или равной нулю. Напротив, фактор ослабления для компонентов с отрицательной подвижностью может быть разным для каждого компонента. Если m из nc компонентов имеют отрицательную подвижность в конце итерации n+1, и компоненты были упорядочены так, что первые m являются компонентами с отрицательной подвижностью, тогда используется следующая система уравнений для определения факторов ослабления:
меньше нуля, а больше либо равно нулю, фактор ослабления вычисляется, чтобы изменить решение для изменения массы компонента i. Однако, когда решение ослабляется, уравнение баланса объема (часть Якоби), вероятно, больше не будет выполняться. Уравнение баланса объема уравнивает объем, занятый жидкостью в блоке сетки, с объемом порового пространства блока сетки. Ошибка в балансе объема может привести к большому изменению в давлении блока сетки для следующей итерации Ньютона, поскольку жидкость пытается расшириться или сжаться, чтобы заполнить объем порового пространства. Это нежелательно, потому что это увеличивает вероятность того, что мы снова будем иметь некорректные направления жидкости. По меньшей мере в некоторых вариантах осуществления изменения массы ослабляются для компонентов, чья подвижность становится отрицательной. Также фактор ослабления вычисляется для компонентов, чья подвижность не становится отрицательной, так что баланс объема сохраняется. Поскольку баланс массы/объема представляет собой единственное уравнение, единственный фактор ослабления (больший или меньший чем 1) используется для компонентов с подвижностью, большей или равной нулю. Напротив, фактор ослабления для компонентов с отрицательной подвижностью может быть разным для каждого компонента. Если m из nc компонентов имеют отрицательную подвижность в конце итерации n+1, и компоненты были упорядочены так, что первые m являются компонентами с отрицательной подвижностью, тогда используется следующая система уравнений для определения факторов ослабления:
 (4)
(4)
где αi представляют собой факторы ослабления для изменений массы каждого из m компонентов, чья подвижность становится отрицательной, β представляет собой фактор ослабления для других nc-m компонентов, ε представляет собой маленькое число, большее либо равное нулю и обычно намного меньшее, чем 1 (т.е. 0≤ε≤1), и volerr представляет собой ошибку баланса объема [(Объем Жидкости/Объем Порового Пространства) - 1]. Если ε больше нуля, то уравнение будет ослаблено так, что подвижность компонента будет слегка положительной. Финальные изменения массы для итерации заданы как:
 (5)
(5)
 (6)
(6)
где dmi представляет собой значение изменения массы для каждого компонента с отрицательной подвижностью, αi представляет собой отдельный фактор ослабления для каждого компонента с отрицательной подвижностью, dmk представляет собой значение изменения массы для каждого компонента положительной подвижности, и β представляет собой общий фактор ослабления для каждого компонента положительной подвижности. Первая строка уравнения 4 представляет m уравнений для m компонентов, чья подвижность становится отрицательной. Верхний правый элемент представляет собой подматрицу (m×m) с i и j, принимающими значения от 1 до m. Вторая строка сохраняет баланс объема. Следует отметить, что эти уравнения применяются для каждого блока сетки, который имеет отрицательную подвижность компонента, и значения αi и β будут различными для каждого из этих блоков сетки.
После решения уравнения 4 и использования фактора ослабления 1 для изменения давления ослабленное решение для итерации не имеет отрицательной подвижности компонента, удовлетворяет линеаризованному уравнению баланса объема и имеет неослабленное давление. Из-за того что решение давления является неослабленным, и решение удовлетворяет балансу объема, направления потока для следующей итерации Ньютона являются намного более надежными и приводят к меньшему количеству разворотов потока, если они есть. Итерации Ньютона сходятся, если никакие подвижности компонентов не становятся отрицательными (или являются отрицательными в некотором приемлемом допуске), и другие критерии сходимости, такие как баланс объема (после нелинейного обновления), меньше, чем определенный допуск.
Следует отметить, что после решения уравнения 4 подвижность компонента одного из nc-m компонентов, которые имели неотрицательную подвижность, может стать отрицательной. В этом случае было бы необходимо решить уравнение 4 снова, включая этот компонент как один из отрицательных компонентов подвижности. Кроме того, возможно, что не может быть вычислено никакого значения β, которое избегает отрицательной подвижности для всех компонентов. В этом случае условие сохранения баланса объема отбрасывается, и факторы ослабления вычисляются для всех компонентов, так что отрицательная подвижность избегается. Наихудший случай заключается в том, что все значения для αi равны нулю. Если это случается, то вероятность разворота потока больше из-за ошибки баланса объема, но это все еще менее вероятно, чем в других схемах ослабления.
Также возможно, что линеаризованная подвижность компонента (вычисленная в уравнении 3) становится отрицательной, только когда масса компонента меньше чем ноль. Это может произойти, если кривые относительной проницаемости выпуклые, как проиллюстрировано на фиг. 4. В этом случае фактор ослабления для этого компонента должен быть таким, что масса компонента является неотрицательной. В таком случае фактор ослабления задается как:
 (7)
(7)
где  представляет собой значение массы компонента i для итерации n, а
представляет собой значение массы компонента i для итерации n, а  представляет собой значение изменения массы компонента i для итерации n+1. Снова, ε представляет собой маленькое число, большее либо равное нулю и обычно намного меньшее, чем 1 (т.е. 0≤ε≤1). По меньшей мере в некоторых вариантах осуществления уравнение 7 применяется к уравнению 4 для каждого компонента i.
представляет собой значение изменения массы компонента i для итерации n+1. Снова, ε представляет собой маленькое число, большее либо равное нулю и обычно намного меньшее, чем 1 (т.е. 0≤ε≤1). По меньшей мере в некоторых вариантах осуществления уравнение 7 применяется к уравнению 4 для каждого компонента i.
Раскрытые операции управления нефизическим атрибутом могут быть объединены с другими операциями управления системы добычи, чтобы гарантировать, что добыча остается возле оптимальных уровней без превышения пределов установки. Системы и способы, описанные в материалах настоящей заявки, частично полагаются на измеренные данные, собранные из различных компонентов системы добычи, включая блоки хранения жидкости, компоненты поверхностной сети и скважины, такие как найденные в месторождениях добычи углеводородов. Такие месторождения обычно включают в себя несколько добывающих скважин, которые предоставляют доступ к подземным жидкостям пласта. Кроме того, управляемые компоненты системы добычи и/или компоненты EOR обычно реализованы на каждой скважине, чтобы регулировать вверх или вниз добычу по мере необходимости. Фиг. 5A-5C показывают примерные эксплуатационные скважины и компьютерную систему для управления сбором данных и добычей.
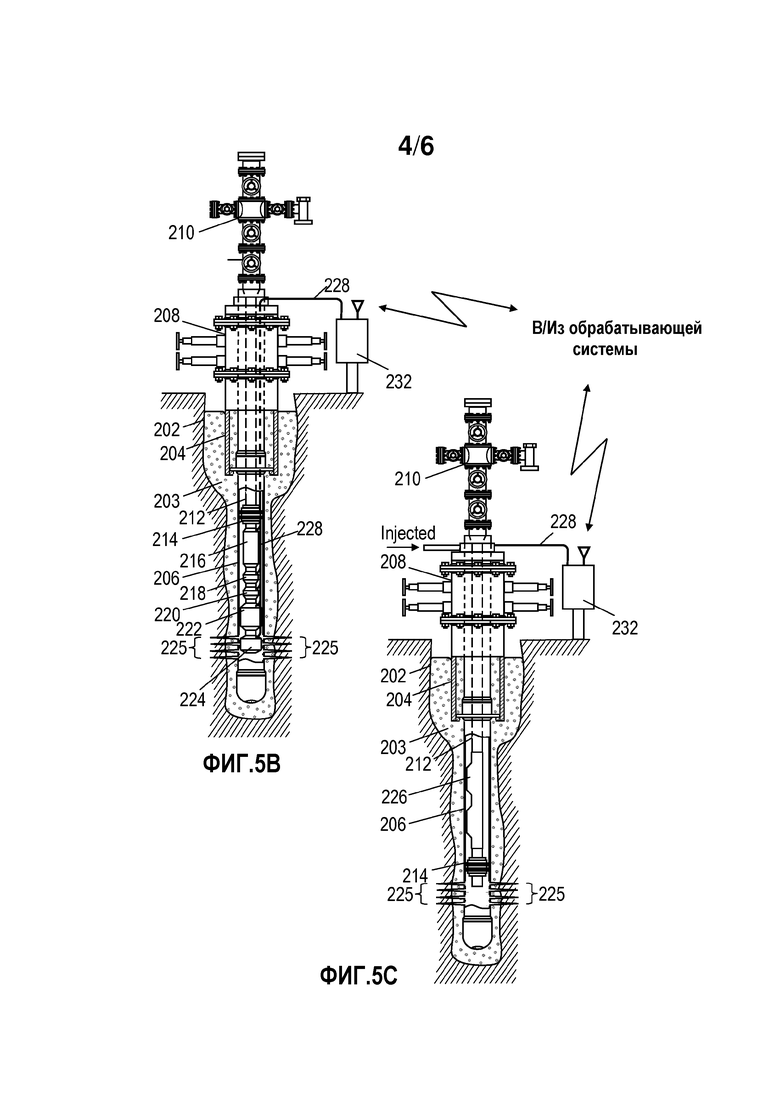
Более конкретно, фиг. 5B показывает пример добывающей скважины со стволом 202 скважины, который был пробурен в землю. Такие стволы скважины обычно бурятся до десяти тысяч футов (3048 метров) или более в глубину и могут управляться горизонтально, возможно, на удвоенное это расстояние. Добывающая скважина также включает в себя головку 204 обсадной колонны и обсадную колонну 206, обе закрепленные на месте цементом 203. Противовыбросовый превентор (BOP) 208 соединяется с головкой 204 обсадной колонны и с устьем 210 эксплуатационной скважины, которые вместе уплотняют устье скважины и позволяют жидкостям извлекаться из скважины безопасным и управляемым способом.
Измеренные данные скважины периодически выбираются и собираются из добывающей скважины и объединяются с измерениями из других скважин в пласте, позволяя контролировать и оценивать общее состояние пласта. Эти измерения могут быть взяты с использованием ряда различных скважинных и поверхностных приборов, включая, но не ограничиваясь ими, датчик 218 температуры и давления и счетчик 220 расхода. Дополнительные устройства, также соединенные в линию с эксплуатационной насосно-компрессорной колонной 212, включают в себя скважинный штуцер 216 (используемый для изменения ограничений потока жидкости), электрический погружной насос (ESP) 222 (который всасывает жидкость, текущую из перфораций 225, за пределы ESP 222 и эксплуатационной насосно-компрессорной колонны 212), двигатель 224 ESP (чтобы приводить в движение ESP 222) и уплотнитель 214 (изолирующий зону добычи ниже уплотнителя от остальной части скважины). Дополнительные поверхностные устройства измерения могут использоваться для измерения, например, давления колонной головки и потребления электрической энергии двигателя 224 ESP. В другом иллюстративном варианте осуществления добывающей скважины, показанном на фиг. 5C, газлифтная инжекторная мандрель 226 соединена в линию с эксплуатационной насосно-компрессорной колонной 212, которая управляет впрыснутым газом, протекающим в эксплуатационную насосно-компрессорную колонну на поверхности. Хотя и не показано, газлифтная добывающая скважина на фиг. 5C также может включать в себя тот же тип скважинных и поверхностных приборов, чтобы обеспечить описанные выше измерения.
Каждое из устройств вдоль эксплуатационной насосно-компрессорной колонны 212 соединяется с кабелем 228, который прикреплен к наружной поверхности эксплуатационной насосно-компрессорной колонны 212 и идет на поверхность через противовыбросовый превентор 208, где он соединяется с панелью 232 управления. Кабель 228 предоставляет энергию устройствам, с которыми он соединяется, и дополнительно предоставляет сигнальные каналы (электрические, оптические и т.д.), которые позволяют управляющим сигналам быть направленными с поверхности в скважинные устройства и телеметрическим сигналам быть принятыми на поверхности из скважинных устройств. Устройства могут управляться и контролироваться локально специалистами по эксплуатации с использованием интерфейса, встроенного в панель 232 управления, или могут управляться и контролироваться удаленной компьютерной системой, такой как компьютерная система 45, показанная на фиг. 2A и описанная ниже. Обмен данными между панелью 232 управления и удаленной компьютерной системой может быть через беспроводную сеть (например, сотовую сеть), через кабельную сеть (например, кабельное соединение к Интернет) или через комбинацию беспроводной и кабельной сетей.
Для обоих вариантов осуществления добывающих скважин на фиг. 5B и 5C панель 232 управления включает в себя удаленный терминал (RTU), который собирает данные из скважинных измерительных устройств и направляет их в систему диспетчерского управления и сбора данных (SCADA), которая является частью обрабатывающей системы, такой как компьютерная система 45 на фиг. 5A. В показанном иллюстративном варианте осуществления компьютерная система 45 включает в себя основанную на сервере-лезвии систему 54, которая включает в себя несколько процессоров-лезвий, по меньшей мере некоторые из которых предоставляют описанную выше функциональность SCADA. Другие процессоры-лезвия могут быть использованы для реализации раскрытых систем и способов решения моделирования. Компьютерная система 45 также включает в себя пользовательскую рабочую станцию 51, которая включает в себя процессор 46 общего назначения. Как процессоры-лезвия сервера-лезвия 54, так и процессор 46 общего назначения предпочтительно сконфигурированы с помощью программного обеспечения, показанного на фиг. 5A, в форме съемного невременного (т.е. энергонезависимого) носителя 52 хранения информации, чтобы обрабатывать собранные данные скважины в пластах и данные из собирающей сети (описанной ниже), которая соединяется с каждой скважиной и передает продукт, извлеченный из пластов. Программное обеспечение может также включать в себя загружаемое программное обеспечение, доступное через сеть связи (например, через Интернет). Процессор 46 общего назначения соединяется с устройством 48 отображения и устройством 50 пользовательского ввода, чтобы человек-оператор мог взаимодействовать с системным программным обеспечением 52. Альтернативно, устройство 48 отображения и устройство 50 пользовательского ввода могут соединяться с обрабатывающим лезвием в сервере-лезвии 54, которое работает как процессор 46 общего назначения или пользовательская рабочая станция 51.
По меньшей мере в некоторых иллюстративных вариантах осуществления дополнительные данные скважины собираются с использованием прибора для каротажа в эксплуатационных скважинах, который может быть опущен с помощью кабеля в эксплуатационную насосно-компрессорную колонну. В других иллюстративных вариантах осуществления эксплуатационная насосно-компрессорная колонна 212 сначала удаляется, и затем прибор для каротажа в эксплуатационных скважинах опускается в обсадную колонну 206. В других альтернативных вариантах осуществления альтернативный метод, который иногда используется, осуществляет каротаж с использованием гибких насосно-компрессорных труб, в котором прибор для каротажа в эксплуатационных скважинах соединяется с окончанием гибкой насосно-компрессорной трубы, вытягиваемой из катушки и проталкиваемой в скважину с помощью устройства захвата и подачи непрерывной колонны насосно-компрессорных труб, расположенного в верхней части устья 210 эксплуатационной скважины. Как и до этого, прибор может быть перемещен вниз либо эксплуатационной насосно-компрессорная колонной 212, либо обсадной колонной 206, после того как эксплуатационная насосно-компрессорная колонна 212 была удалена. Вне зависимости от метода, используемого для его введения и удаления, прибор для каротажа в эксплуатационных скважинах предоставляет дополнительные данные, которые могут использоваться для дополнения данных, собранных с эксплуатационной насосно-компрессорной колонны и устройств измерения обсадной колонны. Данные прибора для каротажа в эксплуатационных скважинах могут быть переданы в компьютерную систему 45 во время процесса каротажа или альтернативно могут быть загружены из прибора для каротажа в эксплуатационных скважинах, после того как инструмент в сборе был извлечен.
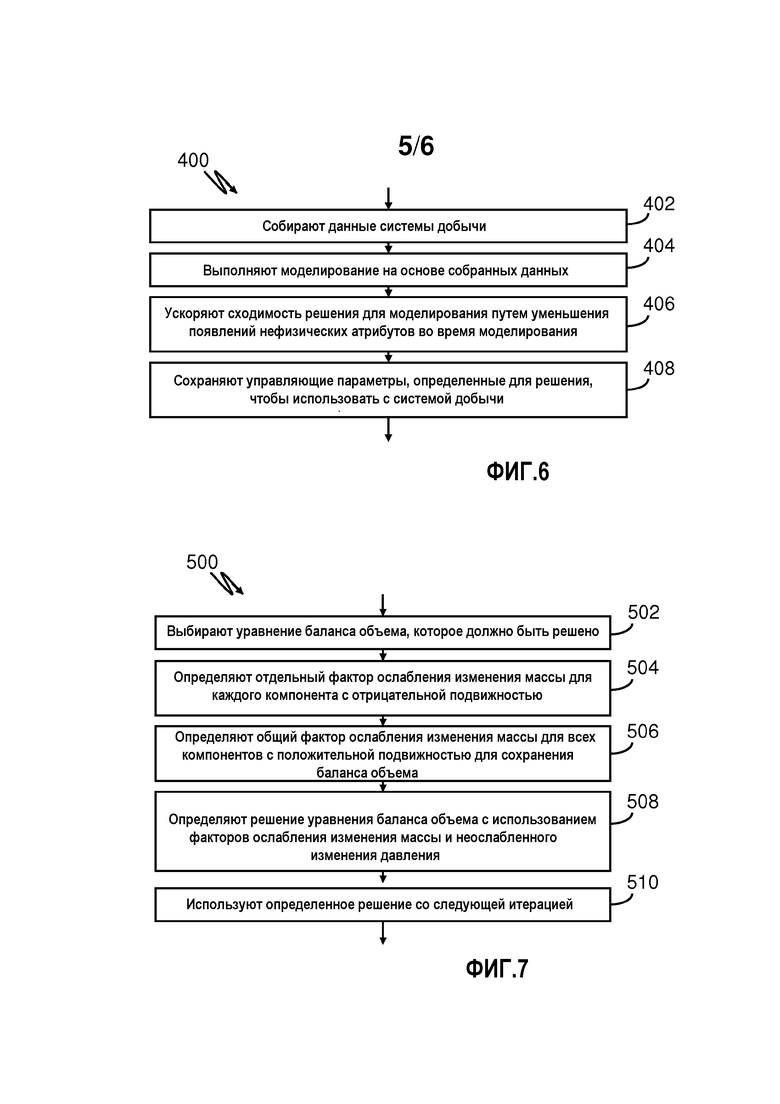
Фиг. 6 показывает иллюстративный способ 400 системы добычи углеводородов. Способ 400 может быть выполнен, например, аппаратными и программными компонентами компьютерной системы 45 или 302 (см. фиг. 5A и 8). Способ 400 включает в себя сбор данных системы добычи в блоке 402. Примеры данных системы добычи включают в себя данные пласта, данные скважины, данные поверхностной сети и/или данные установки. В блоке 404 выполняется моделирование на основе собранных данных, модели жидкости и полностью связанного набора уравнений. По меньшей мере в некоторых вариантах осуществления моделирование в блоке 404 соответствует процессу 10 моделирования, описанному на фиг. 1, и/или операциям средства 120 моделирования, описанного для фиг. 2. Моделирование оценивает поведение системы добычи в определенное время или в течение временного диапазона, применяя при этом различные ограничения. В блоке 406 сходимость решения ускоряется во время моделирования путем уменьшения появлений нефизических атрибутов, как описано в материалах настоящей заявки. Например, шаг блока 406 включает в себя идентификацию и принятие во внимание отрицательных подвижностей. Без ограничения, одно или более из уравнений с 3 по 7, обсужденных выше, может использоваться для ускорения сходимости решения моделирования путем уменьшения появлений нефизических атрибутов. В блоке 408 параметры управления (например, для отдельных скважин, компонентов поверхностной сети и/или компонентов EOR), определенные для решения, хранятся для использования с системой добычи.
Фиг. 7 показывает иллюстративный способ 500 управления нефизическим атрибутом. Способ 500 может быть выполнен, например, аппаратными и программными компонентами компьютерной системы 45 или 302 (см. фиг. 5A и 8). Способ 500 состоит в том, что выбирают уравнение баланса объема, которое должно быть решено, в блоке 502. В блоке 504 отдельный фактор ослабления изменения массы определяется для каждого компонента с отрицательной подвижностью в конце итерации. В блоке 506 общий фактор ослабления изменения массы определяется для всех компонентов с положительной подвижностью в конце итерации, чтобы сохранить баланс объема. В блоке 508 решение уравнения баланса объема определяется с использованием факторов ослабления изменения массы (т.е. отдельные факторы ослабления, применяемые к каждому компоненту с отрицательной подвижностью, и общий фактор ослабления, применяемый ко всем компонентам с положительной подвижностью) и неослабленного изменения давления. В блоке 510 определенное решение используется вместе со следующей итерацией.
Процесс способа 500 может быть применен по мере необходимости для ускорения сходимости решения для системы добычи углеводородов путем уменьшения появлений нефизических атрибутов, таких как отрицательная масса и/или отрицательные насыщения. В некоторых случаях решение баланса объема невозможно (т.е. нет общего фактора ослабления, применяемого к компонентам с положительной подвижностью, который будет уравновешивать все компоненты с отрицательной подвижностью). В этом случае условие сохранение баланса объема отбрасывается, и факторы ослабления применяются так, что отрицательная подвижность избегается для всех компонентов.
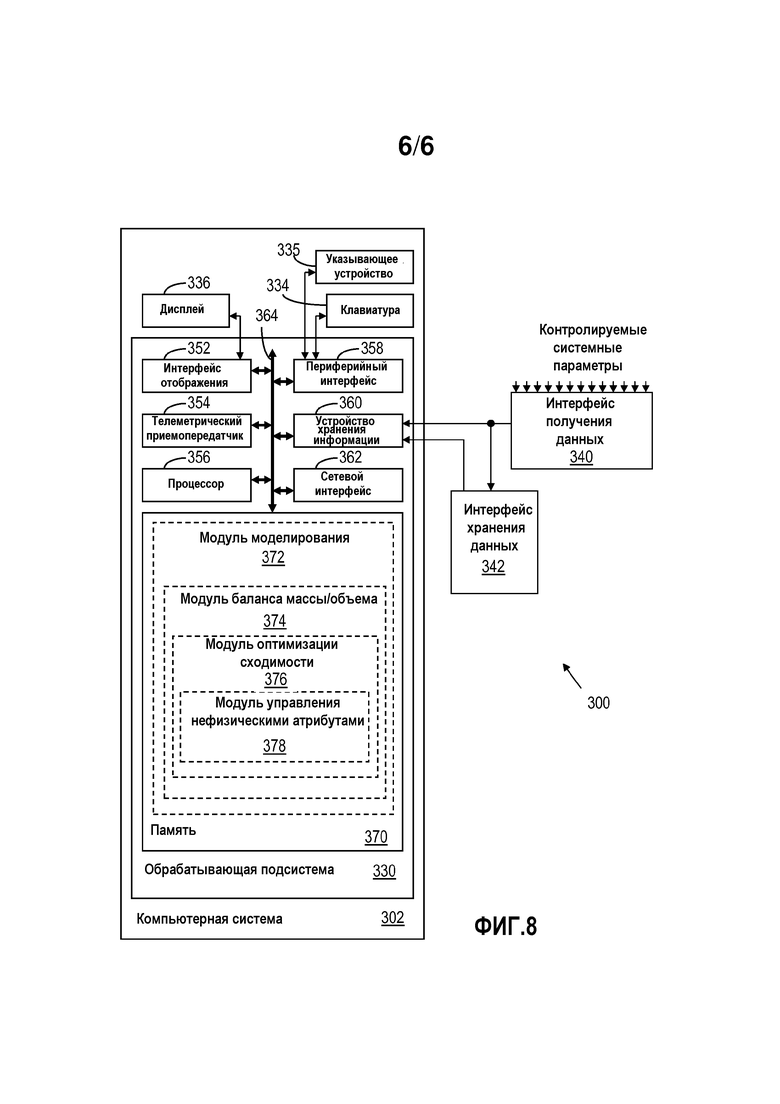
Фиг. 8 показывает иллюстративный интерфейс 300 управления, подходящий для системы добычи углеводородов, такой как система 100 на фиг. 2. Проиллюстрированный интерфейс 300 управления включает в себя компьютерную систему 302, соединенную с интерфейсом 340 получения данных и интерфейсом 342 хранения данных. Компьютерная система 302, интерфейс 342 хранения данных и интерфейс 340 получения данных могут соответствовать компонентам компьютерной системы 45 и/или панели 232 управления на фиг. 5A-5C. По меньшей мере в некоторых вариантах осуществления пользователь может взаимодействовать с компьютерной системой 302 через клавиатуру 334 и указывающее устройство 335 (например, мышь), чтобы выполнять описанные моделирования и/или чтобы отправлять команды и конфигурационные данные одному или более компонентам системы добычи.
Как показано, компьютерная система 302 содержит вычислительную подсистему 330 с интерфейсом 352 отображения, телеметрическим приемопередатчиком 354, процессором 356, периферийным интерфейсом 358, устройством 360 хранения информации, сетевым интерфейсом 362 и памятью 370. Шина 364 соединяет каждый из этих элементов друг с другом и транспортирует их коммуникации. В некоторых вариантах осуществления телеметрический приемопередатчик 354 позволяет обрабатывающей подсистеме 330 обмениваться данными со скважинными и/или поверхностными устройствами (либо прямо, либо опосредованно), а сетевой интерфейс 362 делает возможным обмен данными с другими системами (например, центральной установкой обработки данных через Интернет). В соответствии с вариантами осуществления, данные пользовательского ввода, принятые через указывающее устройство 335, клавиатуру 334 и/или другой периферийный интерфейс 358, используются процессором 356 для выполнения операций управления нефизическими атрибутами, как описано в материалах настоящей заявки. Кроме того, инструкции/данные из памяти 370, устройства 360 хранения информации и/или интерфейса 342 хранения данных используются процессором 356 для выполнения операций управления нефизическими атрибутами, как описано в материалах настоящей заявки.
Как показано, память 370 содержит модуль 372 моделирования, который включает в себя модуль 374 баланса массы/объема. В альтернативных вариантах осуществления модуль баланса 374 массы/объема и модуль 372 моделирования являются отдельными модулями в связи друг с другом. Модуль 372 моделирования и модуль 374 баланса массы/объема являются программными модулями, которые при исполнении приводят к тому, что процессор 356 выполняет операции, описанные для процесса 10 моделирования на фиг. 1 и средства 120 моделирования на фиг. 2. По меньшей мере в некоторых вариантах осуществления модуль 374 массы/объема выполняет операции, описанные для балансировщика 122 массы/объема на фиг. 2. Как показано, модуль 374 баланса массы/объема включает в себя модуль 376 оптимизации сходимости с модулем 378 управления нефизическими атрибутами. По меньшей мере в некоторых вариантах осуществления модуль 376 оптимизации сходимости и модуль 378 управления нефизическими атрибутами являются программными модулями, которые при исполнении приводят к тому, что процессор 356 выполняет операции, описанные для оптимизатора 124 сходимости и программы 126 управления нефизическими атрибутами на фиг. 2. Как только решение системы добычи было определено с использованием операций управления нефизическими атрибутами, описанными в материалах настоящей заявки, компьютерная система 502 сохраняет и/или предоставляет управляющие значения для использования компонентами системы добычи для управления операциями продукции скважины, операциями EOR и/или другими операциями системы добычи.
В некоторых вариантах осуществления определенное решение и/или управляющие параметры могут быть отображены оператору системы добычи для обзора. Альтернативно, определенное решение и/или управляющие параметры могут использоваться для автоматического управления операциями добычи системы добычи. В некоторых вариантах осуществления раскрытые операции управления нефизическими атрибутами используются для планирования или приспособления новой системы добычи, до того как начнется добыча. Альтернативно, раскрытые операции управления нефизическими атрибутами используются для оптимизации операций системы добычи, которая уже работает.
Многочисленные другие модификации, эквиваленты и альтернативные варианты будут очевидны специалистам в данной области техники после того, как приведенное выше раскрытие будет полностью осознано. Например, хотя по меньшей мере некоторые программные варианты осуществления были описаны как включающие в себя модули, выполняющие определенные функции, другие варианты осуществления могут включать в себя программные модули, которые объединяют функции модулей, описанных в материалах настоящей заявки. Также предполагается, что по мере увеличения производительности компьютерной системы может быть возможно в будущем реализовать вышеописанные программные варианты осуществления, используя гораздо меньше аппаратных средств, что делает возможным выполнение описанных операций управления нефизическими атрибутами с использованием систем, расположенных в месте эксплуатации (например, систем, работающих в рамках каротажной тележки, расположенной в пласте). Кроме того, хотя по меньшей мере некоторые элементы вариантов осуществления настоящего раскрытия описаны в контексте отслеживания данных реального времени, системы, которые используют ранее записанные данные (например, системы "воспроизведения данных") и/или смоделированные данные (например, тренажеры) также подпадают под объем раскрытия. Предполагается, что следующие пункты формулы изобретения должны быть интерпретированы, чтобы охватить все такие модификации, эквиваленты и альтернативные варианты, где это применимо.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ОЦЕНИВАНИЯ ЗАПАСОВ УГЛЕВОДОРОДОВ В НЕОДНОРОДНОМ ПЛАСТЕ | 2018 |
|
RU2778354C1 |
| СИСТЕМА И СПОСОБЫ ДЛЯ ОПТИМИЗАЦИИ ИЗВЛЕЧЕНИЯ И ЗАКАЧКИ, ОГРАНИЧЕННЫХ ОБРАБАТЫВАЮЩИМ КОМПЛЕКСОМ, В ИНТЕГРИРОВАННОМ ПЛАСТЕ-КОЛЛЕКТОРЕ И СОБИРАЮЩЕЙ СЕТИ | 2013 |
|
RU2600254C2 |
| Способ прогнозирования объемов добычи углеводородов из месторождений нефти и газа с использованием компьютерного моделирования | 2022 |
|
RU2794707C1 |
| Способ назначения нагнетательных и добывающих скважин и изменения их интервалов перфораций | 2017 |
|
RU2658422C1 |
| СПОСОБ ДОБЫЧИ НЕФТИ ИЛИ ГАЗА С ПРИМЕНЕНИЕМ КОМПЬЮТЕРНОГО МОДЕЛИРОВАНИЯ НЕФТЯНОГО ИЛИ ГАЗОВОГО МЕСТОРОЖДЕНИЯ И ЭКСПЛУАТАЦИОННОГО ОБОРУДОВАНИЯ | 2012 |
|
RU2594405C2 |
| Способ определения избыточной доли легкой фракции нефти, образующейся при транспортировке и подготовке нефтегазоводяной смеси на установках подготовки и перекачки нефти | 2021 |
|
RU2816582C2 |
| Способ и инструмент для выбора параметров эксплуатации скважин на этапе заводнения зрелых нефтяных месторождений | 2017 |
|
RU2681778C2 |
| СПОСОБ КОНТРОЛЯ РАЗРАБОТКИ НЕФТЕГАЗОКОНДЕНСАТНОГО МНОГОПЛАСТОВОГО МЕСТОРОЖДЕНИЯ | 2013 |
|
RU2536721C1 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ АНАЛИЗА ГРАДИЕНТОВ СОСТАВА НА ЗАБОЕ СКВАЖИНЫ И ИХ ПРИМЕНЕНИЕ | 2008 |
|
RU2478955C2 |
| Система прогнозирования производственных данных месторождения на основе их топологического анализа | 2024 |
|
RU2833491C1 |
Изобретение относится к области геофизики и может быть использовано при разработке месторождений углеводородов. Заявлен способ управления системой добычи углеводородов, который состоит в том, что собирают данные системы добычи и выполняют моделирование на основе собранных данных, модели жидкости и полностью связанного набора уравнений. Способ также состоит в том, что ускоряют сходимость решения для моделирования путем уменьшения появлений отрицательной подвижности компонентов во время моделирования. Далее сохраняют управляющие параметры, определенные для решения для использования с системой добычи. Также предложена система управления добычей углеводородов и машинно-читаемый носитель данных. Технический результат - повышение информативности и достоверности результатов моделирования. 3 н. и 17 з.п. ф-лы, 10 ил.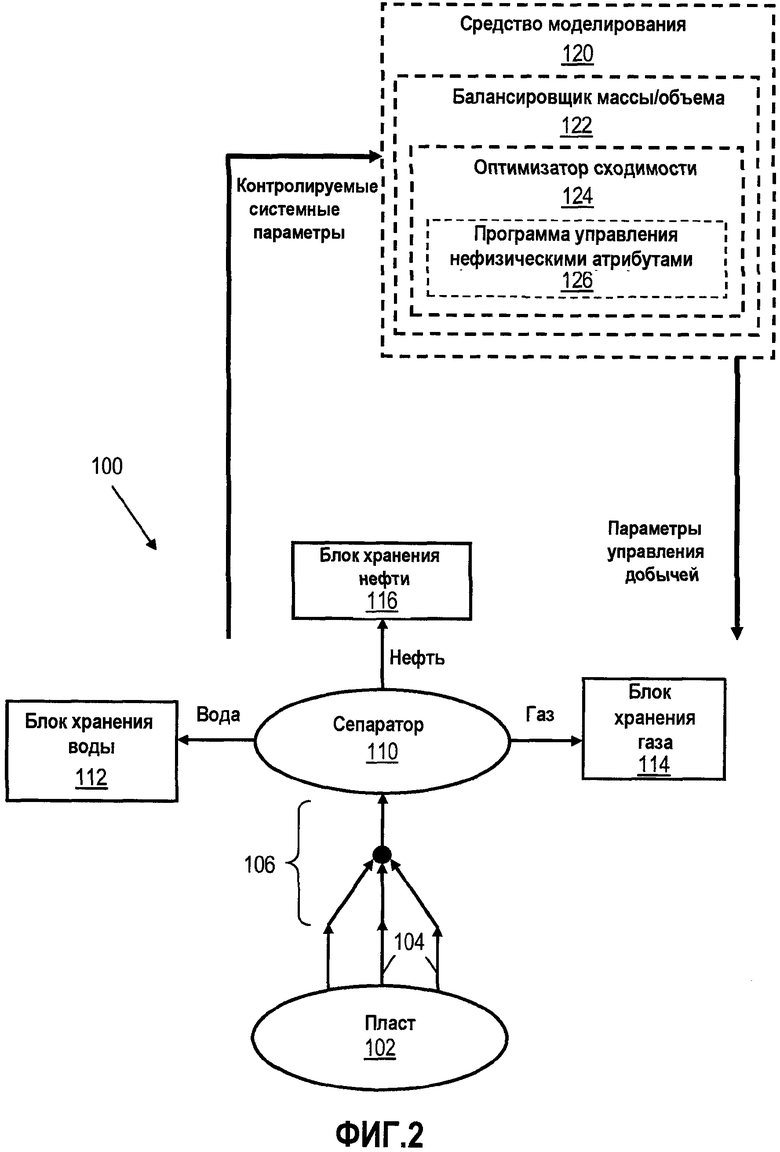
1. Способ управления системой добычи углеводородов, состоящий в том, что:
собирают данные системы добычи;
выполняют моделирование на основе собранных данных, модели жидкости и полностью связанного набора уравнений;
ускоряют сходимость решения для моделирования путем уменьшения появлений отрицательной подвижности компонентов во время моделирования; и
выводят управляющие параметры, определенные для решения для использования с системой добычи.
2. Способ по п. 1, в котором уменьшение появления отрицательной подвижности компонентов во время моделирования включает в себя вычисление подвижности компонента во время итерации n+1 как:

где  представляет собой значение подвижности для итерации n и компонента i,
представляет собой значение подвижности для итерации n и компонента i,  представляет собой линейное изменение в подвижности компонента i, вызванное изменением в давлении для итерации n+1, и
представляет собой линейное изменение в подвижности компонента i, вызванное изменением в давлении для итерации n+1, и  представляет собой сумму линейного изменения в подвижности компонента i, вызванного изменением в массе каждого компонента для итерации n+1.
представляет собой сумму линейного изменения в подвижности компонента i, вызванного изменением в массе каждого компонента для итерации n+1.
3. Способ по п. 2, в котором если  меньше нуля, а
меньше нуля, а  больше либо равна нулю, фактор ослабления вычисляется для модификации решения для изменений массы компонента i.
больше либо равна нулю, фактор ослабления вычисляется для модификации решения для изменений массы компонента i.
4. Способ по п. 1, в котором уменьшение появлений отрицательной подвижности компонентов во время моделирования состоит в том, что ослабляют изменения массы для компонентов с отрицательной подвижностью и вычисляют фактор ослабления для компонентов с положительной подвижностью для сохранения баланса объема.
5. Способ по п. 1, в котором уменьшение появлений отрицательной подвижности компонентов во время моделирования состоит в том, что применяют общий фактор ослабления для компонентов с подвижностью, большей либо равной нулю, и применяют отдельный фактор ослабления для каждого компонента с подвижностью, меньшей нуля.
6. Способ по п. 1, в котором уменьшение появлений отрицательной подвижности компонентов во время моделирования состоит в том, что в ответ на определение того, что пороговое количество компонентов имеет отрицательную подвижность, определяют факторы ослабления с использованием уравнения баланса объема:
где αi представляет собой отдельный фактор ослабления, примененный к изменениям массы для каждого компонента с отрицательной подвижностью, β представляет собой общий фактор ослабления, примененный к изменениям массы для каждого компонента с положительной подвижностью, ε представляет собой значение, большее либо равное 0 и меньшее чем 1, и volerr представляет собой ошибку баланса объема.
7. Способ по п. 6, в котором ослабленные изменения массы для компонентов определяются как:


где dmi представляет собой значение изменения массы для каждого компонента с отрицательной подвижностью, αi представляет собой отдельный фактор ослабления для каждого компонента с отрицательной подвижностью, dmk представляет собой значение изменения массы для каждого компонента с положительной подвижностью, и β представляет собой общий фактор ослабления для каждого компонента с положительной подвижностью.
8. Способ по п. 6, дополнительно состоящий в том, что определяют решение для уравнения баланса объема на основе неослабленного изменения давления и факторов ослабления, которые устраняют отрицательные подвижности компонентов, и используют определенное решение со следующей итерацией.
9. Способ по п. 6, дополнительно состоящий в том, что отбрасывают условие для сохранения баланса объема в ответ на определение того, что никакое из значений β не избегает отрицательной подвижности для всех компонентов.
10. Способ по п. 6, дополнительно состоящий в том, что определяют фактор αi ослабления как:
где  представляет собой значение массы компонента i для итерации n, а
представляет собой значение массы компонента i для итерации n, а  представляет собой значение изменения массы компонента i для итерации n+1, и ε представляет собой значение, большее либо равное 0 и меньшее чем 1.
представляет собой значение изменения массы компонента i для итерации n+1, и ε представляет собой значение, большее либо равное 0 и меньшее чем 1.
11. Система управления добычей углеводородов, содержащая:
память, имеющую программу управления моделированием; и
один или более процессоров, соединенных с памятью, причем программа управления моделированием при исполнении обеспечивает возможность того, что один или более процессоры:
выполняют моделирование системы добычи на основе модели жидкости и полностью связанного набора уравнений;
ускоряют сходимость решения для моделирования путем определения и учета появлений отрицательной подвижности компонентов во время моделирования; и
выводят управляющие параметры, определенные для решения, чтобы использовать с системой добычи.
12. Система управления добычей углеводородов по п. 11, в которой программа управления моделированием при исполнении предписывает одному или более процессорам учитывать появления отрицательной подвижности компонентов во время моделирования путем применения по меньшей мере одного фактора ослабления, если определено, что значение подвижности компонента меняется с положительного на отрицательное во время итерации.
13. Система управления добычей углеводородов по п. 12, в которой по меньшей мере один фактор ослабления меняет массы компонентов с отрицательным знаком на физические массы компонентов, при этом поддерживая баланс объема.
14. Система управления добычей углеводородов по п. 11, в которой программа управления моделированием при исполнении предписывает одному или более процессорам игнорировать условие для сохранения баланса объема в ответ на определение того, что ослабление в одиночку не устраняет отрицательную подвижность для всех компонентов.
15. Система управления добычей углеводородов по п. 11, в которой программа управления моделированием при исполнении предписывает одному или более процессорам определять отдельный фактор ослабления для каждого из множества компонентов с отрицательной подвижностью.
16. Система управления добычей углеводородов по п. 11, в которой программа управления моделированием при исполнении предписывает одному или более процессорам определять общий фактор ослабления для компонентов с положительной подвижностью, где единственный общий фактор ослабления сохраняет баланс объема.
17. Система управления добычей углеводородов по п. 11, в которой программа управления моделированием при исполнении предписывает одному или более процессорам определять решение для уравнения баланса объема на основе неослабленного изменения давления и факторов ослабления, которые устраняют отрицательные подвижности компонентов и используют определенное решение со следующей итерацией.
18. Машинно-читаемый носитель, который хранит программное обеспечение управления моделированием, причем программное обеспечение при исполнении предписывает компьютеру:
выполнение моделирования системы добычи на основе модели жидкости и полностью связанного набора уравнений;
учет отрицательной подвижности компонентов во время моделирования путем применения набора факторов ослабления к изменениям масс компонентов в уравнении баланса массы объема; и
вывод управляющих параметров, определенных моделированием, для использования с системой добычи.
19. Машинно-читаемый носитель по п. 18, в котором программное обеспечение при исполнении предписывает компьютеру определение решения для уравнения баланса массы объема на основе неослабленного изменения давления и набора факторов ослабления и использует определенное решение со следующей итерацией.
20. Машинно-читаемый носитель по п. 19, в котором программное обеспечение при исполнении предписывает компьютеру игнорирование условия для сохранения баланса объема в ответ на определение того, что ослабление в одиночку не устраняет отрицательную подвижность для всех компонентов.
| US 20060036418 A1 ,16.02.2006 | |||
| Приспособление для просекания отверстий и выемок в картонных коробках | 1929 |
|
SU16505A1 |
| US 20070112547 A1 , 17.05.2007 | |||
| US 7672818 B2 , 02.03.2010 | |||
| US 6662146 B1 , 09.12.2003. | |||

