Область техники
Изобретение относится к обеспечению высокоскоростного приведения в действие гидроприводом. В частности, изобретение относится к системе и к способу высокоскоростного приведения в действие гидроприводом для подводной скважины или подводного обрабатывающего оборудования.
Предпосылки изобретения
Данный раздел предназначен для ознакомления с различными аспектами области техники, которые могут относиться к вариантам осуществления известных технологий. Очевидно, что данное описание способствует лучшему пониманию конкретных аспектов раскрытых технологий. Соответственно, следует понимать, что данный раздел необходимо истолковывать в этом свете.
Углеводороды обычно добывают, используя последовательное соединение трубопроводов для передачи углеводородов из устьевого оборудования на эксплуатационное оборудование. Добыча углеводородов управляется при помощи давления и скоростей потока внутри трубопроводов, что может называться управлением процессом. Надводное управление процессом обычно осуществляется посредством регулирования потока газа или жидкости с помощью клапана управления для регулирования давления или скоростей потока. Однако способ подводного клапана не может работать при помощи надводных клапанов управления вследствие суровых природных условий. Подобным образом, приведение в действие пневматическим приводом не может использоваться в подводном управлении процессом вследствие суровых природных условий, особенно сжимаемости воздуха.
Приведение в действие электроприводом может использоваться в подводном управлении процессом, но не может использоваться широко под водой вследствие неапробированной работы электропривода. В результате, приведение в действие электроприводом обычно используется в исполнительных механизмах, которые обеспечивают функции только включения/выключения или пошагового управления.
Гидравлически управляемые дроссели также могут использоваться для регулирования подводных потоков. Дроссельные клапаны раздельно расположены в заданных точках и смещаются с относительно низкими скоростями. В результате, гидравлические регуляторы в дроссельных клапанах не могут обеспечивать изменения потока при скоростях срабатывания, необходимых для эффективного управления процессом.
В качестве альтернативы, гидравлические контуры с подводным насосом могут использоваться для регулирования потоков. В такой ситуации гидравлический контур может быть дополнен использованием подводного насоса для увеличения скорости потока в клапане для открытия и закрытия. Однако насос имеет задержку в начале цикла клапанов, составляющую приблизительно 2-10% от смещения клапанов. Кроме того, двигатель насоса может быть очень нагружен во время эксплуатации и может испытывать недостаток в высокой надежности. По существу, насос имеет возможность увеличения работы и требует технического обслуживания. Различные технические приемы предотвращают такие медленные смещения клапанов, которые описаны в нижеследующих пунктах.
Патент США № 7237472 заявителя Cove (в дальнейшем “Cove”) раскрывает линейный шаговый гидравлический исполнительный механизм с характеристиками быстрого закрытия. Дроссельная система с гидравлическими контурами может обеспечивать позиционирование дроссельного клапана, которое может изменяться за счет использования шагов увеличения. Инкрементное перемещающее действие в направлении или открытия или закрытия может осуществляться за счет использования одного из двух гидравлических исполнительных цилиндров. Может использоваться система быстрого закрытия, которая может обеспечивать управление клапаном в линии быстрого закрытия для смещения дроссельного исполнительного механизма в полностью закрытое положение из любого места при смещении в течение более короткого периода времени по сравнению с обычной шаговой работой вместо выполнения за счет ряда этапов для закрытия клапана. Однако даже при наличии линии быстрого закрытия для смещения дроссельного исполнительного механизма в полностью закрытое положение дроссельная система не может обеспечивать изменения потока при скоростях срабатывания, необходимых для эффективного управления процессом.
Патент США № 6729130 заявителя Lilleland (в дальнейшем “Lilleland”) раскрывает устройство в подводной системе для управления гидравлическим исполнительным механизмом и подводную систему с гидравлическим исполнительным механизмом. Гидравлический исполнительный механизм может быть соединен с подающим трубопроводом для подачи текучей среды в исполнительный механизм и обратным трубопроводом для удаления возвратной текучей среды из исполнительного механизма. Однако подаваемая текучая среда в гидравлический исполнительный механизм может быть недостаточной для обеспечения скоростей срабатывания для эффективного управления процессом.
Сущность изобретения
Вариант осуществления настоящего изобретения включает в себя устройство для высокоскоростного приведения в действие гидроприводом. Пример устройства включает в себя регулятор гидравлического давления, используемый для регулировки положения исполнительного механизма, первый электромагнит, выполненный с возможностью увеличения давления на регулятор гидравлического давления для открытия исполнительного механизма, и второй электромагнит, выполненный с возможностью уменьшения давления на регулятор гидравлического давления для закрытия исполнительного механизма. Устройство может также включать в себя клапан управления, выполненный с возможностью смещения в соответствии с положением исполнительного механизма.
Вариант осуществления настоящего изобретения включает в себя способ высокоскоростного приведения в действие гидроприводом, включающий в себя регулировку положения исполнительного механизма при помощи регулятора гидравлического давления. Регулировка положения исполнительного механизма может включать в себя увеличение давления на регулятор гидравлического давления для открытия исполнительного механизма при помощи первого электромагнита или уменьшения давления на регуляторе гидравлического давления для закрытия исполнительного механизма при помощи второго электромагнита.
Вариант осуществления настоящего изобретения включает в себя способ сбора углеводородов с подводного устьевого оборудования, включающий в себя подсоединение скважинных текучих сред из устьевого оборудования к трехфазному сепаратору. Данные о давлении и данные об уровне текучих сред могут передаваться с подводного сепаратора на подводный модуль управления и центральную станцию управления. Заданные значения могут быть определены на центральной станции управления или на подводном модуле управления при помощи пропорционально-интегрально-дифференциальной схемы в подводном модуле управления. На основании заданных значений гидравлическое давление с регулятора гидравлического давления может регулироваться парой электромагнитов посредством увеличения давления на регулятор гидравлического давления для открытия исполнительного механизма при помощи первого электромагнита, или уменьшения давления на регулятор гидравлического давления для закрытия исполнительного механизма при помощи второго электромагнита. Клапан управления может регулироваться на основании гидравлического давления от пары электромагнитов и исполнительного механизма.
Краткое описание чертежей
Преимущества настоящего изобретения могут стать понятными после изучения нижеследующего подробного описания и чертежей неограничивающих примеров вариантов осуществления, на которых
фиг.1 - схематичный вид системы, обеспечивающей управление процессом под водой в соответствии с вариантом осуществления настоящего изобретения;
фиг.2 - схематичный вид логической схемы управления гидравлическим клапаном с плавной характеристикой в соответствии с вариантом осуществления настоящего изобретения;
фиг.3 - схема технологического процесса, кратко характеризующая способ обеспечения высокоскоростного приведения в действие гидроприводом в соответствии с вариантом осуществления настоящего изобретения;
фиг.4 - схема технологического процесса, кратко характеризующая способ сбора углеводородов с подводного устьевого оборудования в соответствии с вариантом осуществления настоящего изобретения; и
фиг.5 - схематичный вид конфигурации электромагнита в соответствии с вариантом осуществления настоящего изобретения.
Подробное описание
В нижеследующем подробном описании конкретные варианты осуществления описаны с использованием предпочтительных вариантов осуществления. Однако в том смысле, что нижеследующее описание является конкретным для конкретного варианта осуществления или конкретного использования, подразумевается, что оно приведено только в качестве примера и просто описывает примеры осуществления. Соответственно, настоящее изобретение не ограничивается вариантами осуществления, описанными в данном документе, а, скорее, оно включает в себя все альтернативы, модификации и эквиваленты, соответствующие сущности и объему прилагаемой формулы изобретения.
Прежде всего и для упрощения поиска объяснены некоторые термины, используемые в настоящей заявке, и их значения, как использовано в этом контексте. Если термин, используемый в данном документе, не определен ниже, должно быть дано самое широкое определение специалистам в данной области техники термина, как отражено в, по крайней мере, одной напечатанной публикации или выданном патенте.
Термин «система управления» относится к одному или более физическим компонентам системы, использующим логические схемы, которые взаимодействуют для достижения ряда общих результатов процесса. Например, во время работы двигателя газовой турбины целями могут быть, которые должны быть достигнуты, состав выхлопных газов и температура. Система управления может быть выполнена для надежного управления физическими компонентами системы при наличии внешних помех, изменений среди физических компонентов в результате производственных допусков и изменений введенных заданных значений для регулируемых выходных значений. Системы управления обычно имеют, по меньшей мере, одно измерительное устройство, которое обеспечивает показание переменной процесса, которое может быть передано на контроллер, который затем может передавать сигнал управления на исполнительный механизм, который затем приводит в действие исполнительный элемент, действующий, например, на поток оксиданта. Система управления может быть выполнена, чтобы оставаться устойчивой и предотвращать колебания в диапазоне конкретных рабочих условий. Удачно выполненная система управления может значительно уменьшить необходимость в человеческом вмешательстве даже во время нештатных условий в рабочем процессе.
«Пропорционально-интегрально-дифференциальным» контроллером является контроллер, использующий пропорциональные, интегральные и дифференциальные свойства в системе управления процессом. В некоторых случаях дифференциальный режим может не использоваться, или его влияние значительно уменьшено, так что контроллером может быть пропорционально-интегральный контроллер. Существуют различные варианты пропорционально-интегральных и пропорционально-интегрально-дифференциальных контроллеров в зависимости от того, каким образом выполняется дискретизация. Эти известные и прогнозируемые варианты пропорционально-интегральных, пропорционально-интегрально-дифференциальных и других контроллеров рассматриваются подходящими при осуществлении на практике способов и систем настоящего изобретения.
Термин «подводный» относится к положению под поверхностью любой массы воды. Это может включать в себя пресную воду или соленую воду.
Термин «подводная скважина» относится к скважине, которая имеет фонтанную арматуру рядом с дном морского пространства, таким как дно океана.
Термин «трехфазный сепаратор» относится к емкости, в которой исходная трехфазная подача разделяется на отдельные фракции. Обычно емкость имеет достаточную площадь поперечного сечения, так что отдельные фазы могут разделяться под действием тяжести.
Термин «клапан», как использовано в данном документе, обычно относится к устройству, установленному в потоке, которое может открываться, закрываться, регулироваться, изменяться или уменьшаться в сечении для изменения характеристик потока. Например, клапан управления может непрерывно регулироваться в соответствии с электрическим сигналом управления, например сигналом с поверхностного компьютера или модуля скважинного электронного контроллера. Механизм, который фактически изменяет положение клапана, может содержать, но не ограничиваясь этим, электродвигатель, электрический серводвигатель, электромагнит, электропереключатель, гидравлический исполнительный механизм, управляемый, по меньшей мере, одним электрическим серводвигателем, электродвигателем, электропереключателем, электромагнитом или их сочетанием, пневматический исполнительный механизм, управляемый, по меньшей мере, одним электрическим серводвигателем, электродвигателем, электропереключателем, электромагнитом или их сочетанием, или подпружиненное устройство в сочетании с, по меньшей мере, одним электрическим серводвигателем, электродвигателем, электропереключателем, электромагнитом или их сочетанием. Клапан управления может или может не включать в себя позиционный датчик обратной связи для генерации сигнала обратной связи, соответствующего фактическому положению клапана.
Термин «устьевое оборудование» относится к оборудованию, которое образует структурную и находящуюся под давлением границу для бурения скважины, и к эксплуатационному оборудованию. Основным назначением устьевого оборудования является обеспечение точки подвеса и герметичных уплотнений для обсадных труб, которые проходят от дна скважины к оборудованию управления поверхностным давлением. Устьевое оборудование обычно установлено во время бурильных работ и образует выполненную как одно целое конструкцию скважины. Для морских скважин устьевое оборудование обычно называется подводным устьевым оборудованием.
Термин «скважинные текучие среды» относится к сырой нефти, воде, добытой вместе с нефтью, природному газу, песку и другим природным механическим примесям.
Вариант осуществления описывает систему и способ высокоскоростного приведения в действие гидроприводом. Настоящее изобретение обеспечивает эффективную разработку подводных месторождений нефти и может использоваться для добычи нефти и газа подводных арктических месторождений, учитывая эффективные системы управления процессом. Конкретно, настоящее изобретение может допускать использование гидравлического давления для открытия, закрытия или регулирования клапана управления процессом с уровнем точности и скорости, не располагаемым в настоящее время для подводных применений.
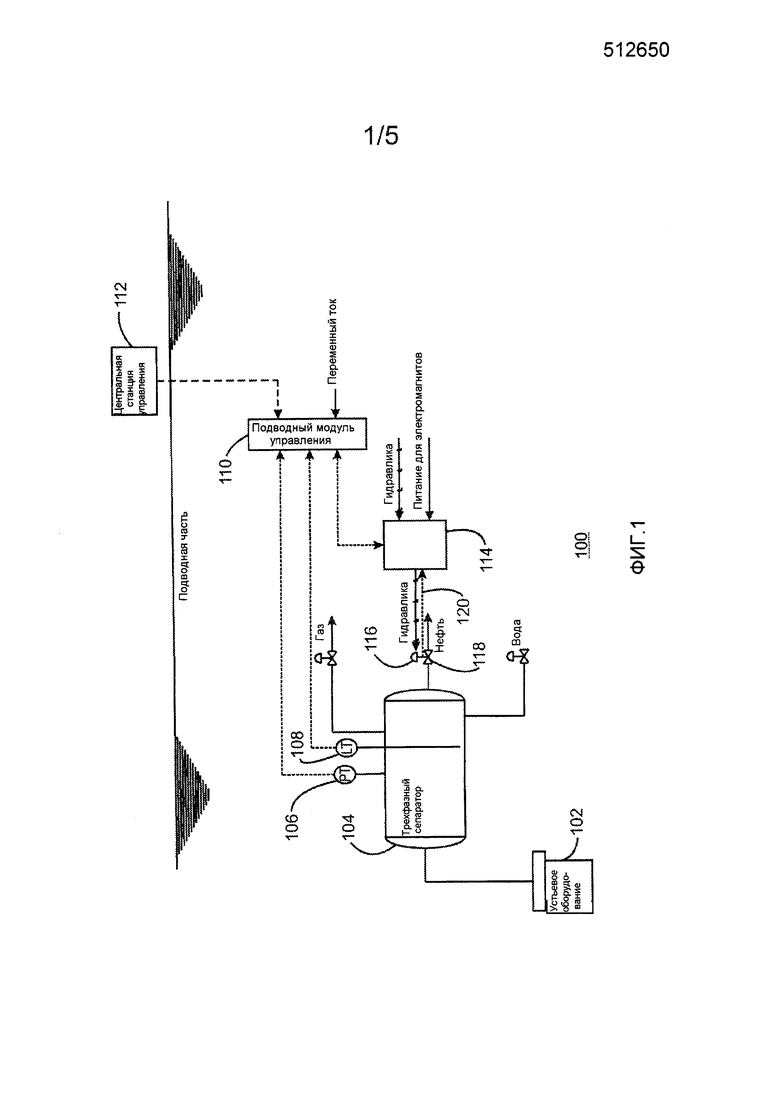
Фиг.1 - схематичный вид системы 100, обеспечивающей управление подводным процессом в соответствии с вариантом осуществления настоящего изобретения. Скважинные текучие среды из устьевого оборудования 102 проходят в подводный сепаратор 104. В изображенных вариантах осуществления подводным сепаратором 104 является трехфазный сепаратор. В других вариантах осуществления подводным сепаратором 104 может быть двухфазный сепаратор газ/жидкость или двухфазовый сепаратор жидкость/жидкость. Датчик 106 давления и датчик 108 уровня контролируют давление текучей среды и уровень текучей среды в подводном сепараторе 104. Датчик 106 давления и датчик 108 уровня передают информацию относительно давления текучей среды и уровня текучей среды на подводный модуль 110 управления. Подводный модуль 110 управления передает информацию, полученную под водой, на центральную станцию 112 управления, которая расположена над водой. Каждый из датчика 106 давления и датчика 108 уровня имеет необходимые «заданные значения» для поддержания заданных уровней текучей среды и уровней давления. Заданные значения могут использовать надводную пропорционально-интегрально-дифференциальную схему для определения необходимого положения клапана управления, передаваемого на модуль 114 электромагнитного позиционера через подводный модуль 110 управления. В варианте осуществления пропорционально-интегрально-дифференциальный контроллер может быть расположен в подводном модуле 110 управления, и заданное значение может выдаваться центральной станцией 112 управления. Модуль 114 электромагнитного позиционера может выполнять функцию позиционера, который обрабатывает гидравлический сигнал в гидравлическом исполнительном механизме 116 для обеспечения необходимого положения клапана 118 управления. Кроме того, электромагнитами, используемыми в модуле 114 электромагнитного позиционера, могут быть электромагниты переменной силы.
Клапан 118 управления может регулировать давление или уровень в подводном сепараторе 104. На основании необходимого изменения положения клапана с центральной станции 112 управления модуль 114 электромагнитного позиционера может быстро подавать давление на гидравлический исполнительный механизм 116 или сбрасывать давление с гидравлического исполнительного механизма 116. В соответствии с изменением давления гидравлический исполнительный механизм 116 может регулировать положение клапана 118 управления. Положение клапана 118 управления может передаваться обратно на модуль 114 электромагнитного позиционера при помощи сигнала 120 обратной связи с индикатора положения клапана. При попытке достичь необходимого положения клапана 118 управления выходной сигнал с модуля 114 электромагнитного позиционера может дополнительно регулироваться при помощи сигнала 120 обратной связи с индикатора положения клапана. В некоторых вариантах осуществления клапан 118 управления может быть расположен в выходном газовом потоке (показано, но не обозначено ссылочной позицией) и регулировать давление в подводном сепараторе.
Датчик 106 давления, датчик 108 уровня, подводный модуль 110 управления, модуль 114 электромагнитного позиционера и сигнал 120 обратной связи с индикатора положения клапана образуют «контур управления», который может отвечать за положение клапана 118 управления. Показания датчика 106 давления и датчика 108 уровня могут несколько раз сравниваться с их необходимым заданным значением на центральной станции 112 управления, заставляя центральную станцию 112 управления передавать или новое или измененное положение клапана на модуль 114 электромагнитного позиционера. Модуль 114 электромагнитного позиционера повторяет последовательность позиционирования по необходимости в соответствии с центральной станцией 112 управления. Недискретное или плавное позиционирование клапана 118 управления может использоваться для удержания датчика 106 давления или датчика 108 уровня в заданном рабочем диапазоне, как определено заданными значениями с центральной станции 112 управления.
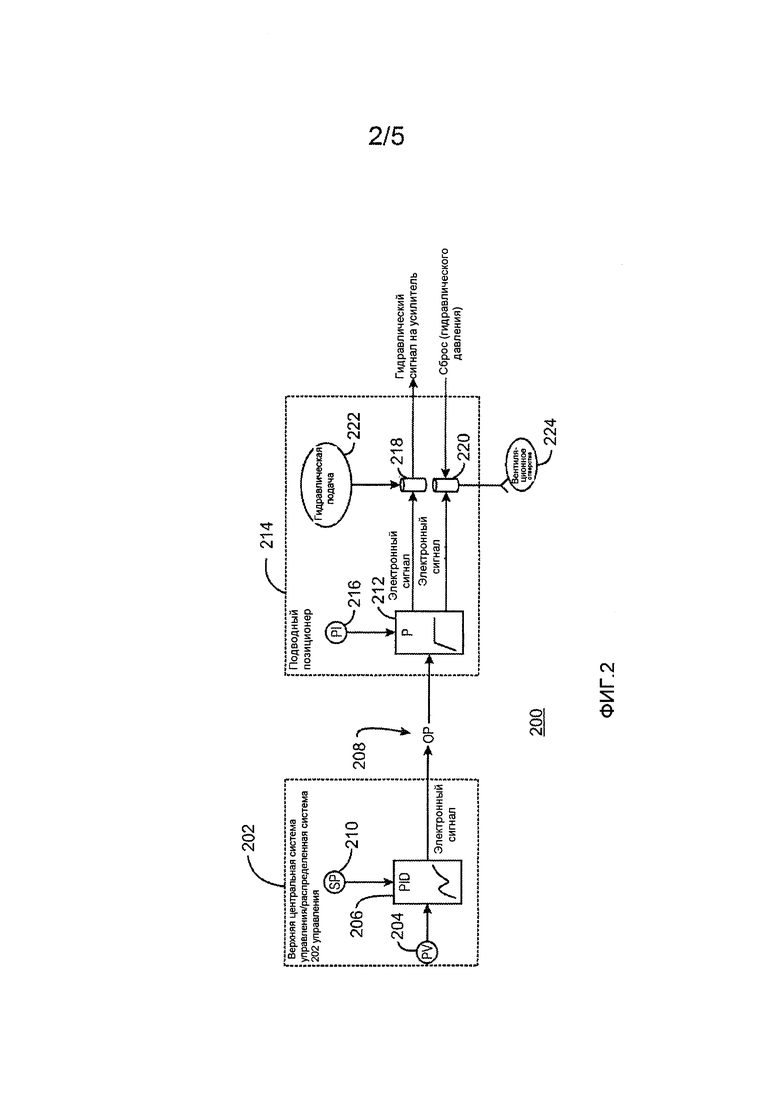
Фиг.2 - схематичный вид логической схемы 200 управления гидравлическим клапаном с плавной характеристикой в соответствии с вариантом осуществления настоящего изобретения. Центральная система управления или система 202 распределения управления, расположенная в надводной части, может быть использована в логической схеме 200 управления гидравлическим клапаном с плавной характеристикой. Данные 204 могут поступать на пропорционально-интегрально-дифференциальный контроллер 206. Данные могут включать в себя переменные данные процесса, такие как сигнал уровня или сигнал давления. Кроме того, пропорционально-интегрально-дифференциальный контроллер 206 может быть расположен в центральной системе управления/системе 202 распределения управления или, в качестве альтернативы, в подводном модуле управления. Положение 208 клапана (рабочее положение) может быть установлено для подводного клапана управления, такого как клапан 118 управления (фиг.1) на основании данных 204 и установленного положения 210. Новое положение 208 клапана может быть рассчитано пропорционально-интегрально-дифференциальным контроллером 206 и направлено на подводный контроллер 212. Новое положение 208 клапана может быть также использовано для поддержания установленного положения 210 в заданном рабочем диапазоне.
Подводный контроллер 212 может быть расположен в подводном позиционере 214. Подводный контроллер 212 может принимать информацию о текущем положении клапана управления, такого как клапан 118 управления (фиг.1), с индикатора 216 положения. Затем подводный контроллер 212 может сравнивать установленное положение 210 от надводного пропорционально-интегрально-дифференциального контроллера 206 с подводным индикатором 216 положения. В зависимости от результатов сравнения подводный контроллер 212 может посылать пропорциональное напряжение на электромагнит 218 или электромагнит 220 для смещения клапана управления, такого как клапан 118 управления (фиг.1), в открытое или закрытое положение. Гидравлическая подача 222 может использоваться для подачи давления на электромагнит 218, в то время как выходное отверстие 224 может использоваться для снятия давления при помощи электромагнита 220.
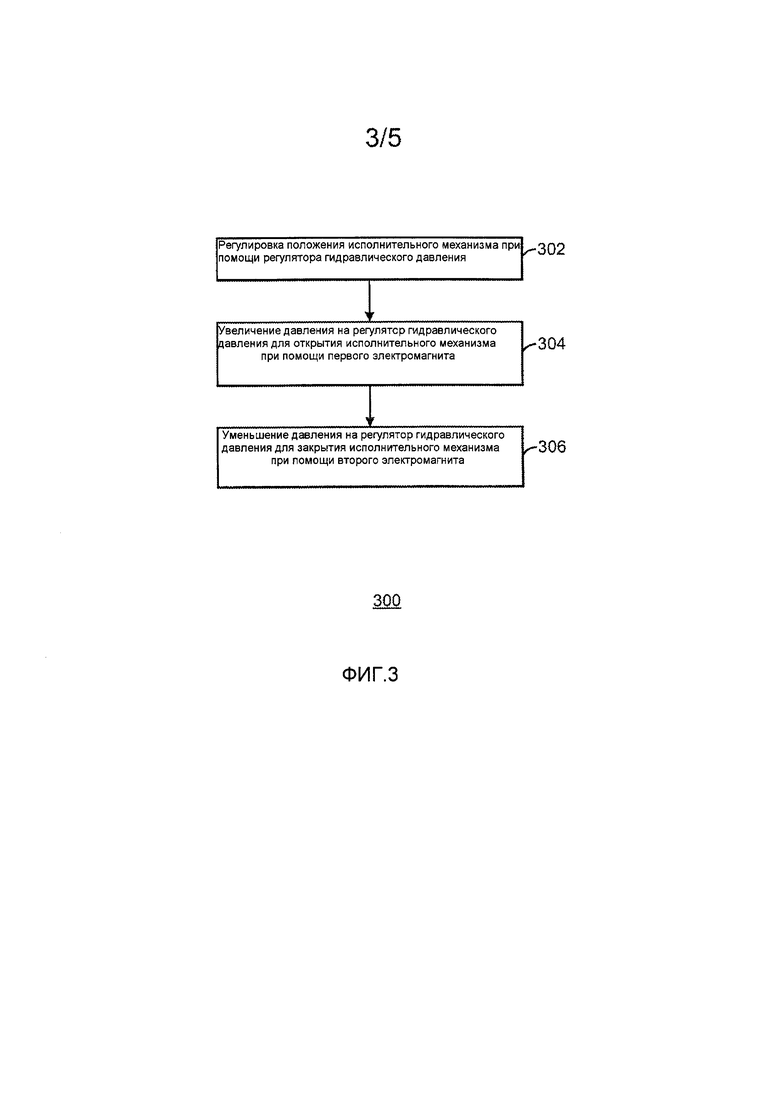
Фиг.3 - схема технологического процесса, кратко характеризующая способ 300 обеспечения высокоскоростного приведения в действие гидроприводом в соответствии с вариантом осуществления настоящего изобретения. В блоке 302 положение исполнительного механизма может регулироваться при помощи регулятора гидравлического давления. В блоке 304 давление на регулятор гидравлического давления может быть увеличено для открытия исполнительного механизма при помощи первого электромагнита. В блоке 306 давление на регулятор гидравлического давления может быть уменьшено для закрытия исполнительного механизма при помощи второго электромагнита.
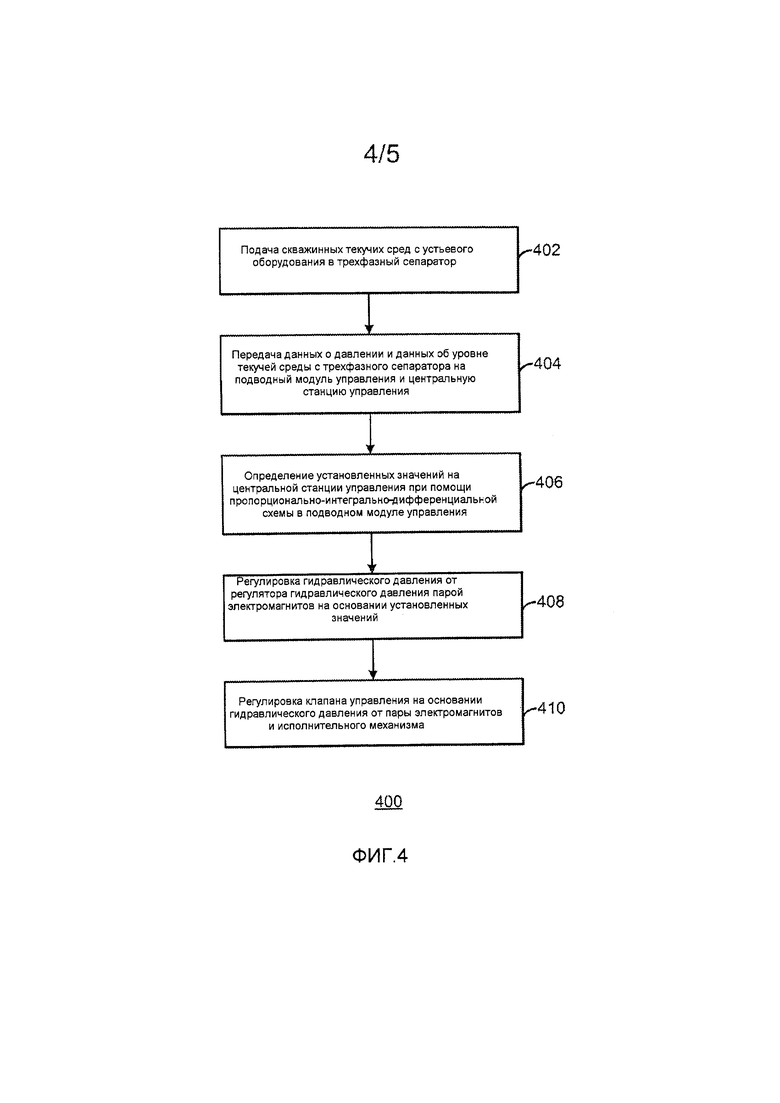
Фиг.4 - схема технологического процесса, кратко характеризующая способ сбора углеводородов с подводного устьевого оборудования в соответствии с вариантом осуществления настоящего изобретения. В блоке 402 скважинные текучие среды могут подаваться из устьевого оборудования в подводный сепаратор. В блоке 404 данные о давлении и данные об уровне текучей среды могут передаваться с подводного сепаратора на подводный модуль управления и центральную станцию управления. В блоке 406 установленные значения могут быть определены на центральной станции управления при помощи пропорционально-интегрально-дифференциальной схемы в подводном модуле управления. В блоке 408 гидравлическое давление от регулятора гидравлического давления может регулироваться парой электромагнитов на основании установленных значений. Давление на регулятор гидравлического давления может быть увеличено при помощи первого электромагнита для открытия исполнительного механизма, или давление на регулятор гидравлического давления может быть уменьшено при помощи второго электромагнита для закрытия исполнительного механизма. В блоке 410 клапан управления может регулироваться на основании гидравлического давления парой электромагнитов и исполнительным механизмом.
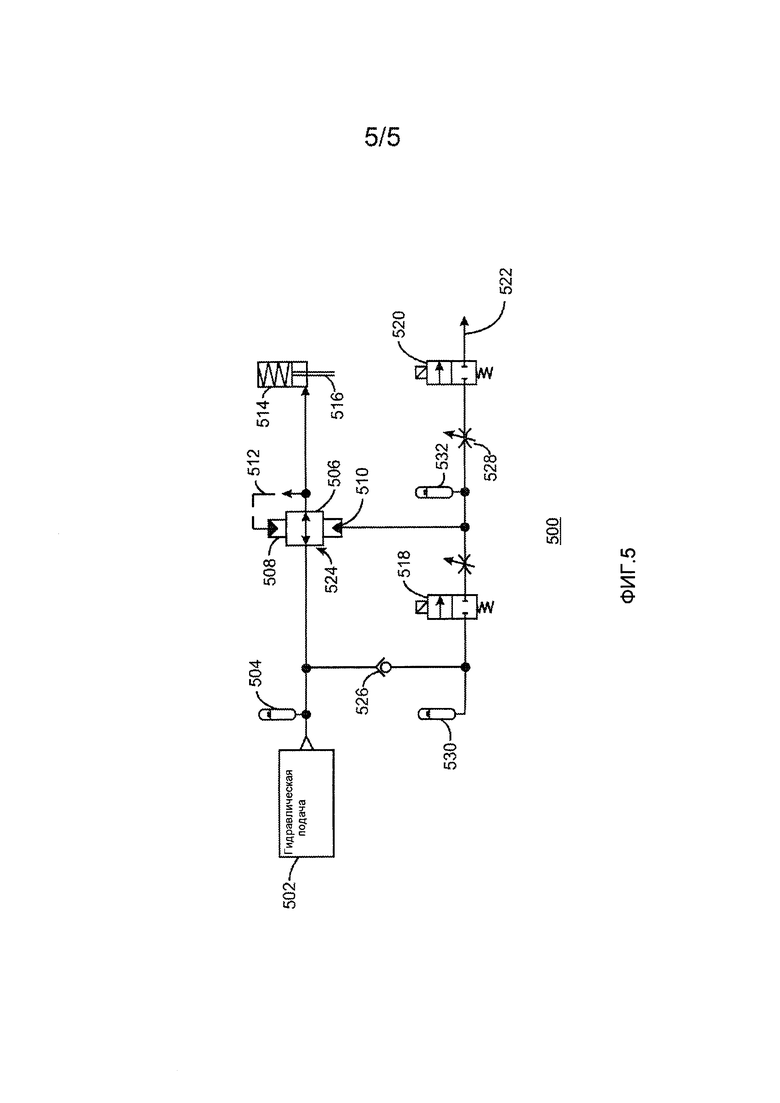
Фиг.5 - схематичный вид конфигурации 500 электромагнита в соответствии с вариантом осуществления настоящего изобретения. В конфигурации 500 электромагнита гидравлическая подача 502 может быть соединена с гидравлическим аккумулятором 504. Гидравлический аккумулятор 504 может подавать гидравлическое давление на регулятор 506 гидравлического давления, и регулятор 506 гидравлического давления включает в себя входное отверстие 508 для противодавления. Счетчик входного отверстия 508 для противодавления компенсирует входной сигнал на отверстии 510 и также выполняет функцию механизма обратной связи для регулятора 506 гидравлического давления. Трубопровод 512 измерения давления обеспечивает также подачу давления на входное отверстие 508 для противодавления за счет выходного давления с исполнительного механизма 514. Когда давление на отверстии 510 и выходное давление в исполнительном механизме 514 уравниваются, трубопровод 512 измерения давления обеспечивает уравновешивание давления на отверстии 510 за счет давления на входном отверстии 510 для противодавления и приводит регулятор 506 гидравлического давления в устойчивое статическое положение до тех пор, пока не изменится давление на отверстии 510. В этом статическом положении давление не подается, ни сбрасывается за счет гидравлического регулятора.
Регулятор 506 гидравлического давления может регулировать положение клапана 516 управления посредством изменения гидравлического давления на исполнительный механизм 514. Посредством увеличения гидравлического давления на исполнительный механизм 514 клапан 516 управления может постепенно закрываться. Гидравлическое давление от регулятора 506 гидравлического давления может регулироваться посредством увеличения или уменьшения гидравлического давления на отверстие 510 при помощи электромагнита. Электромагнитами, используемыми в конфигурации 500 электромагнита, могут быть электромагниты переменной силы. Когда гидравлическое давление на отверстие 510 увеличено, гидравлический регулятор обеспечивает поток от гидравлической подачи в исполнительный механизм до тех пор, пока давление не будет равным на отверстии 510 и не уравновесится за счет давления на отверстии 508 через трубопровод 512. Когда гидравлическое давление на отверстие 510 уменьшено, гидравлический регулятор обеспечивает поток от исполнительного механизма из выходного отверстия 524 на гидравлический регулятор 506, уменьшая давление на исполнительный механизм до тех пор, пока давление на отверстии 508, измеряемое трубопроводом 512, не уменьшится до давления на отверстии 510. Гидравлический регулятор 596 имеет размер такой, что он обеспечивает поток давления или в исполнительный механизм или из него при более высокой скорости, чем если бы одни электромагниты 518 и 520 подавали давление из отверстия 510 на исполнительный механизм.
Напряжение на первом электромагните 518 и втором электромагните 520 может использоваться для изменения гидравлического давления на отверстии 510. Напряжение на первом электромагните 518 и втором электромагните 520 может быть пропорциональным разности текущего гидравлического давления на отверстии 510 и заданного гидравлического давления на отверстии 510. Первый электромагнит 518 и второй электромагнит 520 могут получать напряжение с подводного контроллера, такого как подводный модуль 110 управления (фиг.1) или подводный контроллер 210 (фиг.2). Как описано в данном документе, подводный контроллер может определять напряжение путем сравнения установленного значения 208 наблюдаемой системы от надводного пропорционально-интегрально-дифференциального контроллера 206 с подводным индикатором 214 положения (фиг.2). Первый электромагнит 518 или второй электромагнит 520 могут открываться на величину, которая пропорциональна напряжению, полученному с подводного контроллера. Открытие первого электромагнита 518 может увеличивать гидравлическое давление на отверстие 510, в то время как открытие второго электромагнита 520 может уменьшать гидравлическое давление на отверстие 510.
Для увеличения давления в наблюдаемой системе напряжение на первом электромагните 518 может уменьшаться при уменьшении разности между текущим гидравлическим давлением на отверстии 510 и заданным гидравлическим давлением на отверстии 510 до тех пор, пока не прекратится подача напряжения. При прекращении подачи напряжения гидравлическое давление на отверстии 510 приводит к заданному выходному сигналу на клапан 516 управления. При увеличении гидравлического давления на отверстии 510 регулятор 506 гидравлического давления может открывать канал потока от гидравлической подачи к исполнительному механизму и увеличивать давление на исполнительный механизм 514, таким образом, вызывая закрытие клапана 516 управления.
Для уменьшения давления в наблюдаемой системе второй электромагнит 520 может получать напряжение и открываться пропорционально напряжению для сброса гидравлического давления при помощи выходного отверстия 522. Использование выходного отверстия 522 для сброса гидравлического давления может привести к уменьшению гидравлического давления на отверстии 510. Напряжение на втором электромагните 520 может уменьшаться при уменьшении разности между текущим гидравлическим давлением на отверстии 510 и заданным гидравлическим давлением на отверстии 510 до тех пор, пока не прекратится подача напряжения. При прекращении подачи напряжения гидравлическое давление на отверстии 510 достигает заданного выходного сигнала. При уменьшении гидравлического давления на отверстии 510 регулятор 506 гидравлического давления снимает давление с исполнительного механизма при помощи выпускного отверстия 524 до тех пор, пока давление на отверстии 508 не уменьшится до давления на отверстии 510, таким образом, вызывая открытие клапана 516 управления.
Гидравлический аккумулятор 504 может накапливать гидравлическое давление и обеспечивать быстрое увеличение давления для уменьшения времени срабатывания исполнительного механизма 514. Запорный клапан 526 может предотвращать любую индуцированную реакцию во время высоких потребностей в гидравлическом давлении в исполнительном механизме. Индуцированная реакция возникает, когда потребность от регулятора 506 гидравлического давления вследствие входного сигнала из отверстия 510 является такой большой, что это уменьшает достаточно значительно давление подачи и уменьшает входной сигнал из отверстия 510. Соответственно, уменьшение из отверстия 510 уменьшало бы потребность от регулятора 506 гидравлического давления. Запорный клапан 526 может предотвращать уменьшение подачи вследствие воздействия отверстия 510 независимо от потребности от регулятора 506 гидравлического давления.
Кроме того, ограничители 528 потока могут использоваться для стабилизации гидравлического давления. Аккумулятор 530 и аккумулятор 532 также могут использоваться для стабилизации гидравлического давления. Аккумулятор 530 вместе с запорным клапаном 526 обеспечивает независимость входного давления управления на отверстии 510 от потребностей регулятора 506 гидравлического давления даже во время больших количеств потребления текучей среды в исполнительном механизме 514. Аккумулятор 532 обеспечивает уменьшение реакции на смещение электромагнита и не требуется, если электромагнитом 518 и электромагнитом 520 являются электромагниты переменной силы.
Настоящее изобретение обеспечивает быстрое и эффективное подводное управление процессом даже в случае максимальных удалений. Кроме того, настоящее изобретение обеспечивает быстрое управление модулирующими сигналами при использовании максимальных удалений.
В настоящем изобретении возможны различные модификации и альтернативные формы, и примеры осуществления, описанные выше, были показаны только в качестве примера. Однако подразумевается, что настоящее изобретение не ограничивается конкретными вариантами осуществления, раскрытыми в данном документе. Более того, настоящее изобретение включает в себя все альтернативы, модификации и эквиваленты, соответствующие сущности и объему прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЗИЦИОНЕР КЛАПАНА С ВОЗМОЖНОСТЬЮ ЗАЩИТЫ ОТ ИЗБЫТОЧНОГО ДАВЛЕНИЯ | 2015 |
|
RU2668504C2 |
| СПОСОБ И УСТРОЙСТВО (ВАРИАНТЫ) ДЛЯ СТАБИЛИЗАЦИИ ПОЗИЦИОНЕРА КЛАПАНА ВО ВРЕМЯ ИСПЫТАНИЙ ЭЛЕКТРОМАГНИТНОГО КЛАПАНА | 2017 |
|
RU2752213C2 |
| СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЯ ЭЛЕКТРОМАГНИТНОГО КЛАПАНА И СООТВЕТСТВУЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2017 |
|
RU2752786C2 |
| НЕФТЯНАЯ СКВАЖИНА | 2008 |
|
RU2367786C1 |
| НЕФТЕГАЗОВАЯ СКВАЖИНА | 2008 |
|
RU2365738C1 |
| ГАЗОКОНДЕНСАТНАЯ СКВАЖИНА | 2008 |
|
RU2352760C1 |
| ГАЗОВАЯ СКВАЖИНА | 2008 |
|
RU2352759C1 |
| КУСТ НЕФТЯНЫХ СКВАЖИН | 2008 |
|
RU2367772C1 |
| СПОСОБ ДОБЫЧИ НЕФТИ | 2008 |
|
RU2367777C1 |
| КУСТ ГАЗОКОНДЕНСАТНЫХ СКВАЖИН | 2008 |
|
RU2367788C1 |
Группа изобретений относится к горному делу и может быть применена для высокоскоростного приведения в действие гидроприводом. Описаны устройство и способ высокоскоростного приведения в действие гидроприводом. Способ включает в себя регулировку положения исполнительного механизма при помощи регулятора гидравлического давления и трубопровода измерения давления, который обеспечивает приведение в статическое положение регулятора гидравлического давления за счет давления на входном отверстии для противодавления. Регулировка положения исполнительного механизма включает в себя увеличение давления на регулятор гидравлического давления для открытия исполнительного механизма при помощи первого электромагнита или уменьшение давления на регулятор гидравлического давления для закрытия исполнительного механизма при помощи второго электромагнита. Технический результат заключается в повышении надежности приведения в действие гидроприводом. 3 н. и 10 з.п. ф-лы, 5 ил.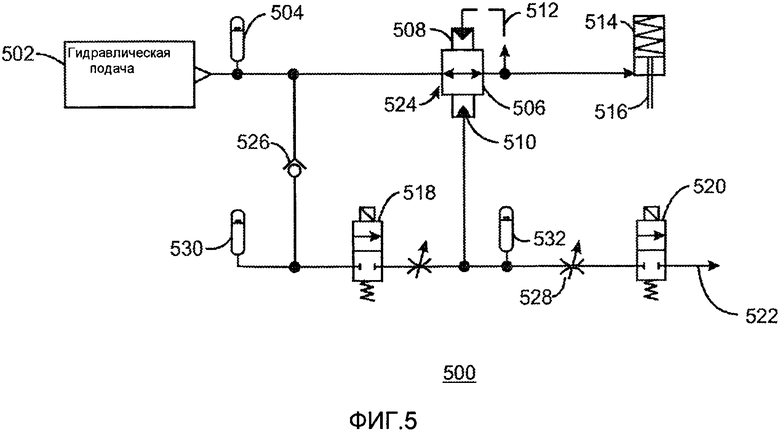
1. Устройство для высокоскоростного приведения в действие гидроприводом, содержащее:
регулятор (506) гидравлического давления, предназначенный для регулировки положения исполнительного механизма (116, 514);
трубопровод (512) измерения давления, который обеспечивает приведение в статическое положение регулятора гидравлического давления за счет давления на входном отверстии (508) для противодавления;
первый электромагнит (218, 518), выполненный с возможностью увеличения давления на регулятор гидравлического давления для открытия исполнительного механизма;
второй электромагнит (220, 520), выполненный с возможностью уменьшения давления на регулятор гидравлического давления для закрытия исполнительного механизма; и
клапан (118, 516) управления, выполненный с возможностью смещения в соответствии с положением исполнительного механизма.
2. Устройство для высокоскоростного приведения в действие гидроприводом по п.1, в котором первым электромагнитом или вторым электромагнитом является электромагнит переменной силы.
3. Устройство для высокоскоростного приведения в действие гидроприводом по п.1, в котором запорный клапан (526) выполнен с возможностью предотвращения гидравлического давления управления от электромагнитов от индуцированной реакции с подачей давления управления на регулятор.
4. Устройство для высокоскоростного приведения в действие гидроприводом по п. 1, в котором ограничители (528) потока стабилизируют гидравлическое давление.
5. Способ высокоскоростного приведения в действие гидроприводом (300), в котором регулируют положение исполнительного механизма при помощи регулятора (302) гидравлического давления и трубопровода измерения давления, который обеспечивает приведение в статическое положение регулятора гидравлического давления за счет давления на входном отверстии для противодавления, причем регулировка положения исполнительного механизма включает в себя
увеличение давления на регулятор гидравлического давления для открытия исполнительного механизма при помощи первого электромагнита (304); или
уменьшение давления на регулятор гидравлического давления для закрытия исполнительного механизма при помощи второго электромагнита (306).
6. Способ высокоскоростного приведения в действие гидроприводом по п.5, в котором используют устройство по любому из пп.1-4.
7. Способ высокоскоростного приведения в действие гидроприводом по п.5, в котором регулятор гидравлического давления подает гидравлическое давление для быстрого изменения гидравлического давления на исполнительный механизм.
8. Способ высокоскоростного приведения в действие гидроприводом по п.5, в котором пропорциональное напряжение на первом электромагните или втором электромагните используют для изменения гидравлического давления на исполнительный механизм.
9. Способ высокоскоростного приведения в действие гидроприводом по п.5, в котором напряжение, поданное на первый электромагнит или второй электромагнит, определяют подводным контроллером или надводной центральной системой управления.
10. Способ сбора углеводородов с подводного устьевого оборудования (400), в котором:
подсоединяют скважинные текучие среды из устьевого оборудования к подводному сепаратору (402);
передают данные о давлении и данные об уровне текучей среды с подводного сепаратора на подводный модуль управления и центральную станцию управления (404);
определяют заданные значения на центральной станции управления или подводном модуле управления при помощи пропорционально-интегрально-дифференциальной схемы в подводном модуле управления (406);
регулируют гидравлическое давление от регулятора гидравлического давления парой электромагнитов на основании заданных значений (408) путем осуществления способа по п.5.
11. Способ сбора углеводородов с подводного устьевого оборудования по п.10, в котором клапан управления используют для сохранения данных о давлении и данных об уровне текучей среды в пределах заданного рабочего диапазона.
12. Способ сбора углеводородов с подводного устьевого оборудования по п.11, в котором используют устройства по любому из пп.1-4.
13. Способ сбора углеводородов с подводного устьевого оборудования по п.10, в котором регулятор гидравлического давления подает гидравлическое давление для быстрого изменения гидравлического давления на исполнительный механизм.
| US 2008135258 A1, 12.06.2008 | |||
| Устройство для сигнализации состояния исполнительных механизмов | 1989 |
|
SU1635205A1 |
| Система управления подводной фонтанной арматурой | 1991 |
|
SU1803526A1 |
| ГИДРАВЛИЧЕСКИЙ РАСПРЕДЕЛИТЕЛЬ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ РАСПРЕДЕЛЕНИЯ РАБОЧЕЙ ЖИДКОСТИ (ВАРИАНТЫ), ПРИМЕНЯЕМЫЕ ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ СКВАЖИННЫХ ИНСТРУМЕНТОВ | 2001 |
|
RU2243361C2 |
| EA 200801203 A1, 27.02.2009 | |||
| US 2005178560 A1, 18.08.2005. | |||

