Изобретение относится к железнодорожному транспорту и может быть использовано для интервального регулирования движения поездов по железнодорожным перегонам.
Известна система, для интервального регулирования движения поездов по перегону, в которой безопасные скорость и интервал между попутно следующими поездами автоматически поддерживаются локомотивными бортовыми устройствами, получающими исходную информацию о координатах местонахождения своего и соседних поездов на участке управления из диспетчерского центра управления по цифровому каналу радиосвязи, а также от бортовых устройств спутниковой навигации. При этом поезда оборудованы устройствами контроля целостности их состава, а интервальное регулирование движения осуществляется координатным способом (описание системы СИРДП-Е на http://ru.bombardier.com/ru/pdf/BT-RCS-Products-Book_ru.pdf). В этой системе для безопасного сближения поездов и достижения максимальной пропускной способности перегонов используют определение местоположения поездов бортовыми средствами одометрии с корректировкой при помощи пассивных реперных датчиков и/или систем спутниковой навигации ГЛОНАСС/GPS и данных о параметрах маршрута движения из электронной карты рельсового пути. При этом непрерывно осуществляют контроль целостности состава поезда посредством двух полукомплектов аппаратуры СКЦП, один из которых закрепляется на хвостовом вагоне. Полукомплекты аппаратуры СКЦП непрерывно контролируют давление в основных агрегатах пневматической тормозной системы поезда и, при его падении ниже заданного уровня, инициируют передачу аварийного сигнала в центр радиоблокировки.
Система обладает высокой пропускной способностью в режиме функционирования с подвижными блок-участками и в тоже время эффективна для применения на малодеятельных линиях или линиях с большой сезонной и суточной неравномерностью движения.
К недостаткам известной системы следует отнести большое количество путевых реперных устройств и наличие дополнительного оборудования в хвостовом вагоне состава, усложняющего формирование и обслуживание железнодорожных составов.
В качестве прототипа выбрана система управления движением поездов на перегоне, содержащая два полукомплекта аппаратуры, установленных на счетных участках станций, ограничивающих перегон, причем каждый полукомплект аппаратуры содержит установленные на контрольном путевом участке соответствующего счетного участка рельсовые датчики, которые через формирователь сигналов соединены с входом блока приемников, выход которого через блок интерфейса со счетчиками осей соединен с локальной магистралью связи, к которой подключены блок интерфейса с электрической централизацией, блок управления и блок интерфейса с радиоканалом дальней цифровой радиосвязи, к которому подключен радиомодем с антенной, на каждом из промежуточных участков железнодорожного перегона размещен счетный пункт, включающий стационарный приемопередающий блок ближней цифровой радиосвязи, порт управления которым соединен с первым портом микроконтроллера, второй порт которого, через интерфейс сопряжения, соединен с датчиком прохода колеса, при этом входы питания стационарного приемопередающего блока и микроконтроллера подключены к автономному источнику питания, при этом на каждом локомотиве подвижного состава установлено приемопередающее устройство каналов дальней и ближней цифровой радиосвязи, которое посредством локальной магистрали соединено с центральным бортовым устройством управления движением подвижного состава (RU 2531661, B61L 21/06, 27.10.14).
Известная система эффективна для применения на малодеятельных линиях, из-за простоты и низких эксплуатационных расходов, но не обладает достаточной пиковой пропускной способностью из-за отсутствия в ней организации движения по системе подвижными блок-участками. Это ограничивает область применения системы и делает ее не пригодной для использования на линиях с большой сезонной и суточной неравномерностью движения, а также затрудняет проведение ремонтных путевых работ, когда требуется ускоренный пропуск поездов в пакете для создания затем окна, имеющего требуемую продолжительность по времени для проведения необходимых ремонтных работ.
Технический результат изобретения заключается в увеличении пропускной способности системы без существенного увеличения сложности путевых устройств и эксплуатационных расходов на путевые устройства и подвижной состав.
Технический результат достигается тем, что в системе управления движением поездов на перегоне, содержащей два полукомплекта аппаратуры (на чертеже показан один полукомплект), установленных на счетных участках станций, ограничивающих перегон, причем каждый полукомплект аппаратуры содержит установленные на контрольном путевом участке соответствующего счетного участка рельсовые датчики, которые через формирователь сигналов соединены с входом блока приемников, выход которого через блок интерфейса со счетчиками осей соединен с локальной магистралью связи, к которой подключены блок интерфейса с электрической централизацией, блок управления и блок интерфейса с радиоканалом дальней цифровой радиосвязи, к которому подключен радиомодем с антенной, при этом на каждом из промежуточных участков железнодорожного перегона размещен счетный пункт, включающий стационарный приемопередающий блок ближней цифровой радиосвязи, порт управления которым соединен с первым портом микроконтроллера, второй порт которого через интерфейс сопряжения соединен с датчиком прохода колеса, при этом входы питания стационарного приемопередающего блока и микроконтроллера подключены к автономному источнику питания, а на каждом локомотиве подвижного состава установлено приемопередающее устройство дальней и ближней цифровой радиосвязи, которое посредством локальной магистрали соединено с центральным бортовым устройством управления движением подвижного состава, согласно изобретению на каждом локомотиве установлены и подключены к локальной магистрали блок измерения давления и уровня акустических шумов в основных агрегатах пневматической тормозной системы поезда, блок электронной карты маршрута, блок вычисления текущих координат начала и конца состава поезда, блок измерения ускорений движения поезда, блок интеллектуальной оценки риска нарушения целостности состава поезда и блок отображения информации машинисту, при этом приемопередающее устройство дальней и ближней цифровой радиосвязи локомотива подвижного состава через каналы дальней цифровой радиосвязи соединены с приемопередающими устройствами дальней и ближней цифровой радиосвязи другого локомотива непосредственно следующего за ним подвижного состава и центра диспетчерского управления движением.
На чертеже приведена схема предлагаемой системы управления движением поездов на перегоне.
Система управления движением поездов на перегоне содержит два полукомплекта аппаратуры, установленных на счетных участках 2 станций, ограничивающих перегон 1. Каждый полукомплект аппаратуры содержит установленные на контрольном путевом участке соответствующего счетного участка 2 рельсовые датчики 3, которые через формирователь 4 сигналов соединены с входом блока 5 приемников, выход которого через блок 6 интерфейса со счетчиками осей соединен с локальной магистралью 7 связи, к которой подключены блок 8 интерфейса с электрической централизацией, блок 9 управления и блок 10 интерфейса с радиоканалом дальней цифровой радиосвязи, к которому подключен радиомодем 11 с антенной. На каждом из промежуточных участков 12 железнодорожного перегона размещен счетный пункт 13, включающий стационарный приемопередающий блок 14 ближней цифровой радиосвязи, порт управления которым соединен с первым портом микроконтроллера 15, второй порт которого через интерфейс 16 сопряжения соединен с датчиком 17 прохода колеса, при этом входы питания стационарного приемопередающего блока 14 и микроконтроллера 15 подключены к автономному источнику 18 питания. На каждом локомотиве 19 подвижного состава установлено приемопередающее устройство 20 дальней и ближней цифровой радиосвязи, которое посредством локальной магистрали 21 соединено с центральным бортовым устройством 22 управления движением подвижного состава. На каждом локомотиве 19 установлены и подключены к локальной магистрали 21 блок 24 измерения давления и уровня акустических шумов в основных агрегатах пневматической тормозной системы поезда, блок 25 электронной карты маршрута, блок 26 вычисления текущих координат начала и конца состава поезда, блок 27 измерения ускорений движения поезда, блок 28 интеллектуальной оценки риска нарушения целостности состава поезда и блок 29 отображения информации машинисту, при этом приемопередающее устройство 20 дальней и ближней цифровой радиосвязи локомотива 19 подвижного состава через каналы дальней цифровой радиосвязи соединены с приемопередающими устройствами дальней и ближней цифровой радиосвязи другого локомотива непосредственно следующего за ним подвижного состава и центра 23 диспетчерского управления движением.
Центральное бортовое устройство 22 управления движением подвижного состава содержит устройство контроля безопасности движения поезда и опционально содержит устройство автоведения поезда и/или устройство автоматического управления служебным торможением. Блок 24 измерения давления и уровней вибрации и акустических шумов в основных агрегатах пневматической тормозной системы поезда имеет датчики давления, датчики уровней вибраций и датчики уровней акустических шумов в тормозной магистрали поезда (на чертеже не показаны). Блок 27 измерения ускорений движения поезда использует информацию об изменении скорости локомотива во времени от центрального бортового устройства 22 управления движением и также имеет акселерометры (на чертеже не показаны) для измерения мгновенных ускорений поезда. В качестве каналов дальней цифровой радиосвязи в системе могут быть использованы каналы связи GSM, GSM - R, каналы связи в диапазоне ультракоротких волн (160 МГц), а в качестве каналов ближней цифровой радиосвязи - каналы связи по стандартам Wi-Fi, Wi-Max, Z-Wave и другие подобные каналы связи, подходящие по условиям дальности связи.
Система управления движением поездов на перегоне работает следующем образом.
Полукомплекты аппаратуры системы на станциях, ограничивающих перегоны, работают попарно в двух основных режимах приема и отправления. Когда один полукомплект работает в режиме отправления, другой работает в режиме приема. В режиме отправления состава со станции на вход блока 8 интерфейса с электрической централизацией поступает сигнал отправления на прилегающую станцию. Этот сигнал через локальную магистраль 7 связи передается в виде кодовой посылки блоку 9 управления. При въезде первой колесной пары на счетный участок 2, на вход блока 8 поступает сигнал занятости контрольного участка 2, который в виде кодовой посылки через локальную магистраль 7 связи передается блоку 9 управления. Блок 9 управления через локальную магистраль 7 связи передает блоку 6 интерфейса со счетчиками осей команду на включение счета осей. Блок 6 включает блок 5 приемников, принимающий входные сигналы прохода колесных пар поезда от рельсовых датчиков 3.
Информацию о проходе всего состава по счетному участку 2 железнодорожного перегона 1 формирует блок 8 в виде кодовой посылки, которая передается через локальную магистраль 7 связи в блок 9 управления. По этой же локальной магистрали блок 9 управления получает от блока 6 интерфейса со счетчиками осей информацию о количестве осей состава, прошедших по счетному участку 2. Далее блок 9 управления через локальную магистраль 7 связи передает в блок 10 интерфейса с радиоканалом дальней цифровой радиосвязи информацию о количестве осей в составе, прошедшем по счетному участку 2. Эта информация через радиомодем 11 по радиоканалу дальней цифровой радиосвязи поступает в приемопередающее устройство 20 дальней и ближней цифровой радиосвязи локомотива 19 подвижного состава, уходящего со станции. Полученная информация о количестве осей в составе через локальную магистраль 21 записывается в память центрального бортового устройства 22 управления движением подвижного состава.
В режиме приема состава на станцию, передатчик приемопередающего устройства 20 дальней и ближней цифровой радиосвязи локомотива 19 по каналу дальней цифровой радиосвязи передает информацию о количестве осей в его составе в стационарный радиомодем 11 дальней цифровой радиосвязи полукомплекта принимающей станции. Эта информация через блок 10 интерфейса с радиоканалом дальней цифровой радиосвязи и локальную магистраль 7 связи поступает в блок 9 управления на принимающей станции. После прохода всего прибывающего состава по счетному участку 2 (аналогично рассмотренному при отправлении поезда) блок 9 управления через локальную магистраль 7 связи получает от блока 6 интерфейса со счетчиками осей информацию о количестве осей состава, прошедших по счетному участку 2 принимающей станции. Блок 9 управления сравнивает посчитанное блоком 6 интерфейса со счетчиками осей, число осей и информацию о количестве осей, поступившую с локомотива 19, и при совпадении чисел передает через локальную магистраль 7 связи команду в блок 8 принимающей станции на выдачу сигнала прибытия поезда в полном составе. Блок 8 вырабатывает соответствующий сигнал прибытия в полном составе и формирует кодовую посылку, которую передает через локальную магистраль 7 связи в блок 9 управления, и система приходит в исходное состояние.
Для повышения пропускной способности, каждый локомотив 19 в процессе движения по перегону 1 может активизировать работу нескольких промежуточных счетных пунктов 13 для координатного контроля постепенного освобождения участков пути между промежуточными счетными пунктами 13 перегона 1. Эта возможность имеется для локомотивов 19, оборудованных современными бортовыми устройствами управления, в которых имеется электронная карта маршрута с координатной привязкой местоположения путевых устройств, и имеется возможность непрерывного уточнения текущей координаты местонахождения локомотива 19, по спутниковому навигатору.
В этом случае, при проследовании каждым локомотивом 19 промежуточного счетного пункта 13 система работает следующим образом.
При приближении локомотива 19 к очередному промежуточному счетному пункту 13 его центральное бортовое устройство 22 управления активизирует приемопередающее устройство 20 дальней и ближней цифровой радиосвязи, которое непрерывно, через бортовую антенну, по каналу ближней цифровой радиосвязи вызывает стационарный приемопередающий блок 14 канала ближней цифровой радиосвязи промежуточного счетного пункта 13, находящегося впереди, используя известный центральному бортовому устройству 22 управления адрес вызова этого стационарного приемопередающего блока 14 канала ближней цифровой радиосвязи по известной координате его местоположения. Сигнал, принятый блоком 14, переключает его из ждущего режима, обеспечивающего малый ток потребления, в режим установления связи. В этом режиме он вначале принимает от бортового приемопередающего устройства 20 локомотива 19 информацию об адресе устройства 20. В ответе блок 14 передает информацию на локомотив 19 о своей координате и диагностическую информацию о своей готовности и исправности. Принятую информацию бортовое приемопередающее устройство 20 передает в центральное бортовое устройство 22 управления для проверки идентификационных и диагностических данных аппаратуры данного промежуточного счетного пункта 13. При положительном результате проверки передатчик бортового приемопередающего устройства 20 локомотива 19 передает в стационарный приемопередающий блок 14 пакет информации, содержащий номер локомотива 19, номер вызова локомотивных устройств для передачи данных по маломощному цифровому радиоканалу ближней связи, количество осей в составе и разрешение на счет осей. В процессе проверки аппаратура локомотива 19 использует информацию о координате промежуточного счетного пункта 13 из блока 25 электронной карты маршрута и о своей координате, определенной устройством спутниковой навигации (на чертеже не показано) в блоке 26 вычисления текущих координат начала и конца состава. При каких-либо ошибках в принятии пакетов информации осуществляется повторная передача пакетов информации. После окончания обмена информацией передатчик приемопередающего устройства 20 дальней и ближней цифровой радиосвязи данного локомотива 19 начинает передавать сигнал несущей канала ближней цифровой радиосвязи, по уровню принимаемой мощности которого на промежуточном счетном пункте 13 оценивается степень приближении локомотива 19. Поскольку скорость передачи по каналу ближней цифровой радиосвязи достигает десятков килобод, а дальность надежной связи составляет 1-2 километра, сеанс надежного радиообмена между промежуточным счетным пунктом 13 и приближающимся к нему локомотивом 19 завершается в течение 1-3 секунд, т.е. за десятки секунд до прохода локомотивом 19 промежуточного участка 12 с промежуточным счетным пунктом 13. Для снижения в это время расхода энергии батареи стационарный приемопередающий блок 14 снова переходит в режим ожидания с малым потреблением, а в режим готовности к приему и передаче переходит только при заданном уровне несущей принимаемого сигнала. Если локомотив 19 остановится, не проехав промежуточный счетный пункт 13, то прекращается передача несущей, чтобы аппаратура промежуточного счетного пункта 13 вернулась в ждущий режим с малым потреблением тока. Активный режим блока 14 и микроконтроллера 15 сохраняется только во время их взаимодействия с проходящим локомотивом 19. При проходе над датчиком 17, каждого колеса поезда, датчик 17 срабатывает от деформации рельса и формирует импульс на входе микроконтроллера 15. Микроконтроллер 15 считает количество этих импульсов, фильтрует по длительности случайные помехи и сравнивает посчитанное число импульсов с ожидаемым количеством осей в поезде. Если происходит совпадение и далее в течение заданного промежутка времени срабатывания датчика 17 прекращаются, то блок 14 передает на локомотив 19 пакет информации, содержащей кодовый сигнал проследования поезда в полном составе и также фактическое (посчитанное микроконтроллером 15) число осей. Центральное бортовое устройство 22 управления движением подвижного состава локомотива 19 использует информацию от промежуточного счетного пункта 13, для контроля следования поезда в полном составе. После получения с уходящего локомотива 19 подтверждения приема пакета информации (или же не получения такого подтверждения), через заданный промежуток времени микроконтроллер 15 переводит всю электронику счетного пункта 13 в ждущий режим с микропотреблением тока. Информация о результатах счета осей в промежуточных счетных пунктах 13 передается с локомотива 19 по радиоканалу дальней связи в радиомодемы 11 дальней цифровой радиосвязи прилегающих станций и может далее использоваться в центре 23 диспетчерского управления, обеспечивая возможность управления движением поездов на перегоне, как по системе с фиксированными блок-участками, границы которых определяются положением промежуточных счетных пунктов 13, так и с подвижными блок-участками, с использованием информации о координатах начала и конца состава каждого поезда и информации о целостности состава каждого поезда.
Режим работы системы интервального регулирования движения с фиксированными блок-участками резервирует режим работы системы интервального регулирования с подвижными блок-участками, если текущие координаты, определяемые блоком 26 вычисления текущих координат начала и конца состава, имеют неопределенность, приводящую к недопустимому риску нарушения безопасности движения. Риск, с периодичностью, достаточной для управления риском, оценивается в блоке 28 интеллектуальной оценки риска нарушения целостности состава поезда.
В процессе движения поезда в локальную магистраль 21 с заданной периодичностью поступают цифровые сообщения от блока 24 измерения давления и уровней вибрации и акустических шумов в основных агрегатах пневматической тормозной системы поезда, блока 25 электронной карты маршрута, блока 26 вычисления текущих координат начала и конца состава поезда, блока 27 измерения ускорений движения поезда и блока 28 интеллектуальной оценки риска нарушения целостности состава поезда. Эти сообщения посредством локальной магистрали 21 передаются центральному бортовому устройству 22 управления движением подвижного состава, которое осуществляет автоведение поезда, автоматическое управление служебным торможением и контролирует безопасность движения. Центральное бортовое устройство 22 управления движением подвижного состава отображает машинисту всю необходимую информацию для управления поездом на дисплее блока 29 отображения информации машинисту. Центральное бортовое устройство 22 управления движением подвижного состава, на основании сообщений, принимаемых из локальной магистрали 21, определяет фактическую скорость движения, ускорение поезда, а также путь, пройденный с момента начала движения, на основании чего производится координатная привязка к электронной карте участка движения и определяется текущая координата нахождения поезда. С помощью средств спутниковой навигации проводится дополнительное уточнение текущей координаты нахождения локомотива 19 поезда. В центральное бортовое устройство 22 управления движением подвижного состава также поступает информация об ограничениях по скорости движения от путевых устройств и из центра 23 диспетчерского управления движением. Также в центральное бортовое устройство 22 управления движением подвижного состава может поступать информация от локомотива впереди идущего поезда. На основании совокупной информации центральное бортовое устройство 22 управления движением подвижного состава выбирает режимы управления поездом. Информация от путевых устройств (на чертеже не показаны) может поступать на локомотивы по рельсовым линиям, путевым шлейфам, и обмен информацией между данным локомотивом 19 и путевыми устройствами может осуществляться по локальным цифровым маломощным радиоканалам связи. Обмен информации с центром 23 диспетчерского управления и с локомотивами 19 соседних поездов производится по цифровым радиоканалам дальней связи. Центральное бортовое устройство 22 управления движением подвижного состава производит анализ входящей информации, обработку в соответствии с заложенными алгоритмами и выработку управляющих воздействий на тормозные устройства локомотива 19 и его тяговое оборудование. Команды на управление тяговым током (набор и сброс позиций главного контроллера) в центральном бортовом устройстве 22 управления движением подвижного состава выдает только входящая в него подсистема автоведения поезда (на чертеже не показана). При необходимости снижения скорости торможением, например, при достижении предельно допустимого значения скорости, подсистема автоведения поезда инициирует управляющее воздействие на локомотивную тормозную систему, осуществляющую служебное торможение. При отказе подсистемы автоведения в осуществлении такого воздействия, управление служебным торможением перехватывается в центральном бортовом устройстве 22 управления движением подвижного состава входящей в него подсистемой автоматического управления служебным торможением (на чертеже не показана). При недостаточной эффективности служебного торможения процесс управления торможением перехватывается в центральном бортовом устройстве 22 управления движением подвижного состава входящей в него подсистемой контроля безопасности движения. В результате управляющего воздействия подсистемой контроля безопасности движения инициируется экстренное торможение поезда. В процессе работы центрального бортового устройства 22 управления движением подвижного состава автоматически осуществляется выявление опасных неисправностей тягового, тормозного и вспомогательного оборудования локомотива, железнодорожного пути и устройств интервального регулирования, которые могут привести к нарушениям безопасности движения. Введенный блок 28 интеллектуальной оценки риска нарушения целостности состава поезда вырабатывает предупреждения о повышенном риске того, что мог произойти отрыв хвостовой части от остального состава. Основанием для выработки таких предупреждений является комплексный анализ вторичных данных об ускорениях из блока 27 измерения ускорений движения поезда и блока 24 измерения давления и уровней вибрации и акустических шумов в основных агрегатах пневматической тормозной системы поезда при учете данных о плане и профиле пути, поступающих из блока 25 электронной карты маршрута для текущих координат местонахождения состава поезда. Текущие координаты начала и конца состава ("следа поезда" на электронной карте маршрута) рассчитываются блоком 26 вычисления текущих координат начала и конца состава исходя из данных о плане и профиле пути из блока 25 электронной карты маршрута, известной длине состава поезда и данных о целостности состава поезда. Целостность состава поезда, с требуемым высоким уровнем достоверности, проверяется методом счета осей после прохождении хвостовым вагоном состава поезда пунктов 13 счета осей с известным координатами. По мере удаления хвоста состава поезда от пункта 13 счета осей, блок 26 вычисления текущих координат начала и конца состава периодически рассчитывает новые координаты конца состава поезда, каждый раз исходя из знания новой текущей координаты начала состава поезда по навигационным данным спутникового навигатора (на чертеже не показан) блока 26 и данных плана и профиля пути из блока 25 электронной карты маршрута. Расчет каждый раз ведется в предположении целостности состава поезда. Если блок 28 интеллектуальной оценки риска нарушения целостности состава поезда выдает предупреждение о нарушении целостности состава поезда, то результаты расчета перестают использоваться в системе. Блок 28 интеллектуальной оценки риска нарушения целостности состава поезда непрерывно контролирует возникновение неблагоприятных условий движения состава поезда и выдает предупреждение о нарушении целостности состава поезда, когда риск нарушения целостности состава возрастает сверх допустимой нормы. Нарушения целостности состава могут происходить из-за динамических нагрузок в сцепках вагонов состава поезда, превышающих пределы конструктивной прочности. Такое критическое возрастание динамических нагрузок может происходить при воздействии как одиночных, так и совокупном воздействии нескольких неблагоприятных факторов. В частности, такими факторами могут быть резкие переходы от торможения поезда к набору скорости, особенно для составов, имеющих большой вес. Эти резкие переходы фиксируются блоком 27 измерения ускорений движения поезда. Риск разрыва состава поезда особенно возрастает на профилях пути, имеющих резкие переходы от подъема к спуску, или в планах пути, имеющих большую кривизну. Признаками возрастания риска могут являться падение давления и увеличение уровня вибраций и акустических шумов в тормозной магистрали состава поезда. Информация об этом поступает в блок 22 из блока 24 измерения давления и уровней вибрации и акустических шумов в основных агрегатах пневматической тормозной системы поезда.
В блок 22 центрального управления движением поезда периодически поступает информация из блока 28 интеллектуальной оценки риска нарушения целостности состава поезда о текущей оценке уровня риска.
Эта информация также через приемопередающее устройство 20 дальней и ближней цифровой радиосвязи локомотива 19 передается по каналу дальней цифровой радиосвязи в центр 23 диспетчерского управления движением и в приемопередающие устройство 20 дальней и ближней цифровой радиосвязи локомотива 19 второго поезда, непосредственно следующего за данным первым поездом по тому же пути железнодорожного перегона 1. Информация отображается машинистам первого и второго поезда на дисплеях блока 29 отображения информации и влияет на выбор режима ведения первого поезда и режим сближения второго поезда с первым поездом. Эта информация также учитывается поездным диспетчером в центре 23 диспетчерского управления движением при централизованном управлении движением поездов. Если уровень риска увеличивается, то машинист второго поезда увеличивает расстояние до первого поезда, до необходимой для безопасности движения величины, вплоть до расстояния попутного следования при интервальном регулировании по системе блок-участков с фиксированными границами их местоположения. Возврат к интервальному регулированию движения по системе подвижных блок-участков машинист второго поезда осуществляет после того, как центр 23 диспетчерского управления движением и/или приемопередающее устройство 20 дальней и ближней цифровой радиосвязи локомотива 19 второго поезда принимают новое сообщение, отменяющее прежнее предупреждение. Это сообщение может поступить после прохождения первым поездом в полном составе через очередной пункт 13 счета осей. Его может также и раньше выработать блок 28 интеллектуальной оценки риска нарушения целостности состава поезда локомотива 19 первого поезда, если в блоке 28 будет определено, что тревога была ложной и разрыва поезда не было. В зависимости от запасов по допустимому расстоянию попутного следования начало интенсивного торможения второго поезда может быть задержано. Интенсивные торможения с глубокой разрядкой тормозной магистрали приводят к существенной потере времени хода из-за времени, которое потом требуется на отпуск тормозов и восстановление давления в тормозной магистрали. В течение времени, на которое можно задержать интенсивное торможение, ранее выданное предупреждение может быть отменено вследствие получения новых данных о том, что первый поезд следует в полном составе. Минимально допустимый интервал попутного следования второго поезда, с заданной периодичностью рассчитывается в центральном бортовом устройстве 22 управления движением подвижного состава локомотива 19 второго поезда на основе данных о текущей скорости и ускорении первого и второго поездов, с учетом тормозных характеристик второго поезда и плана, и профиля пути.
При следовании поездов в полном составе предлагаемое изобретение позволит обеспечить сокращение интервалов попутного следования поездов и увеличение пиковой пропускной способности системы без существенного увеличения сложности путевых устройств и эксплуатационных расходов на путевые устройства и подвижной состав. Это расширяет область применения системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для определения свободности от подвижного состава участков пути на железнодорожном перегоне | 2024 |
|
RU2820356C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СВОБОДНОСТИ ОТ ПОДВИЖНОГО СОСТАВА УЧАСТКОВ ПУТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕГОНЕ | 2010 |
|
RU2452644C2 |
| Способ определения свободности от подвижного состава участков пути на железнодорожном перегоне | 2021 |
|
RU2762453C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СВОБОДНОСТИ ОТ ПОДВИЖНОГО СОСТАВА УЧАСТКОВ ПУТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕГОНЕ | 2012 |
|
RU2511760C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СВОБОДНОСТИ УЧАСТКОВ ПУТИ ОТ ПОДВИЖНОГО СОСТАВА | 2015 |
|
RU2600175C1 |
| СИСТЕМА ПОЛУАВТОМАТИЧЕСКОЙ БЛОКИРОВКИ | 2013 |
|
RU2531661C1 |
| Система обмена данными локомотивных систем с диспетчерским центром контроля и управления | 2018 |
|
RU2678915C1 |
| ВРЕМЕННАЯ СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА УСКОРЕННО ВОССТАНАВЛИВАЕМЫХ ЖЕЛЕЗНОДОРОЖНЫХ ПЕРЕГОНАХ | 2019 |
|
RU2732636C1 |
| Система контроля целостности состава | 2015 |
|
RU2614158C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА БАЗЕ РАДИОКАНАЛА | 2014 |
|
RU2556133C1 |

Изобретение относится к области железнодорожного транспорта для интервального регулирования движения поездов. Система задействует центр диспетчерского управления, два полукомплекта, установленных на счетных участках, ограничивающих перегон. Причем каждый полукомплект содержит рельсовые датчики, формирователь сигналов, блок приемников, интерфейс, счетчики осей, локальную магистраль связи, интерфейс с электрической централизацией, блок управления, интерфейс с радиоканалом дальней цифровой радиосвязи, радиомодем с антенной. На промежуточных участках перегона размещен счетный пункт, включающий приемопередающий блок, микроконтроллер, интерфейс сопряжения, датчик прохода колес, источник питания. На каждом локомотиве установлено приемопередающее устройство связи, связующая локальная магистраль, устройство управления, блок измерения давления и уровня акустических шумов в основных агрегатах пневматической тормозной системы, блок электронной карты маршрута, блок вычисления текущих координат начала и конца состава, блок измерения ускорений движения, блок оценки риска нарушения целостности и блок отображения информации машинисту. Достигается увеличение пропускной способности. 1 ил.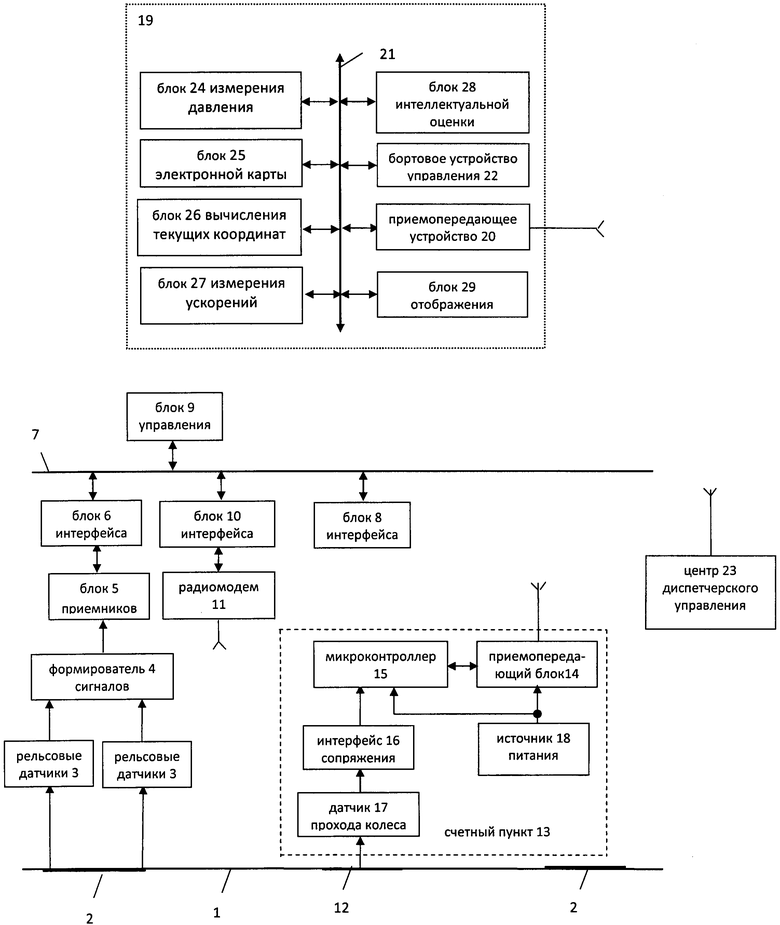
Система управления движением поездов на перегоне, содержащая два полукомплекта аппаратуры, установленных на счетных участках станций, ограничивающих перегон, причем каждый полукомплект аппаратуры содержит установленные на контрольном путевом участке соответствующего счетного участка рельсовые датчики, которые через формирователь сигналов соединены с входом блока приемников, выход которого через блок интерфейса со счетчиками осей соединен с локальной магистралью связи, к которой подключены блок интерфейса с электрической централизацией, блок управления и блок интерфейса с радиоканалом дальней цифровой радиосвязи, к которому подключен радиомодем с антенной, при этом на каждом из промежуточных участков железнодорожного перегона размещен счетный пункт, включающий стационарный приемопередающий блок ближней цифровой радиосвязи, порт управления которым соединен с первым портом микроконтроллера, второй порт которого через интерфейс сопряжения соединен с датчиком прохода колеса, при этом входы питания стационарного приемопередающего блока и микроконтроллера подключены к автономному источнику питания, а на каждом локомотиве подвижного состава установлено приемопередающее устройство дальней и ближней цифровой радиосвязи, которое посредством локальной магистрали соединено с центральным бортовым устройством управления движением подвижного состава, отличающаяся тем, что на каждом локомотиве установлены и подключены к локальной магистрали блок измерения давления и уровня акустических шумов в основных агрегатах пневматической тормозной системы поезда, блок электронной карты маршрута, блок вычисления текущих координат начала и конца состава поезда, блок измерения ускорений движения поезда, блок интеллектуальной оценки риска нарушения целостности состава поезда и блок отображения информации машинисту, при этом приемопередающее устройство дальней и ближней цифровой радиосвязи локомотива подвижного состава через каналы дальней цифровой радиосвязи соединены с приемопередающими устройствами дальней и ближней цифровой радиосвязи другого локомотива непосредственно следующего за ним подвижного состава и центра диспетчерского управления движением.
| СИСТЕМА ПОЛУАВТОМАТИЧЕСКОЙ БЛОКИРОВКИ | 2013 |
|
RU2531661C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СВОБОДНОСТИ ОТ ПОДВИЖНОГО СОСТАВА УЧАСТКОВ ПУТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕГОНЕ | 2010 |
|
RU2452644C2 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2513883C1 |
| DE 4423787 C1, 30.11.1995. | |||

