Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано в системах интервального регулирования движения поездов на перегоне.
Известна система, содержащая непрерывные и точечные каналы передачи данных между напольными устройствами и поездами с расположением на пути интеллектуальных датчиков, позволяющих локомотиву уточнять свое местоположение и обеспечить контроль целостности состава поезда. В системе обеспечивается точное и надежное определение позиций поездов на перегоне за счет взаимного резервирования нескольких подсистем навигации и надежной цифровой радиосвязи между локомотивами и радиоблок-центрами управления движением (журнал «Железные дороги мира» №2, 2007, с.64).
Недостатком известной системы является необходимость в большом объеме дополнительной путевой и локомотивной аппаратуры (радиоблок- центры, ретрансляторы, евробализы, радары, акселерометры и.т.д.) причем как на грузонапряженных, так и на малодеятельных линиях. В связи с этим использование таких систем требует чрезмерных капитальных вложений, что практически не реально выполнить в существенных для сети железных дорог масштабах.
Наиболее близкой по своей технической сущности к заявляемой системе является выбранная в качестве прототипа система интервального регулирования движения поездов на перегоне, содержащая на перегоне между постами ЭЦ соседних станций n блок-участков с неограниченными рельсовыми цепями тональной частоты и проходными светофорами, при этом каждая рельсовая цепь блок участков соединена соответственно с напольными устройствами сопряжения общего с соседней рельсовой цепью передающего конца и своего приемного конца, напольные устройства сопряжения приемных концов соединены через кабельную сеть с входами соответствующих приемников кодовых сигналов тональной частоты, которые размещены на ближайших к их блок-участкам постах ЭЦ рядом с передатчиками кодовых сигналов тональной частоты своих рельсовых цепей (проспект аппаратуры АБТЦ-М на сайте завода изготовителя http://www.irz.ru/products/20/73.htm)
На каждом из обращающихся на участке дороги локомотивов, оборудованном данной системой интервального регулирования, имеется комплексное локомотивное устройство безопасности КЛУБ-У с входящими в его состав приемниками автоматической локомотивной сигнализации непрерывного типа, систем АЛС-ЕН и АЛСН, приемником точечного канала, приемником систем спутниковой навигации ГЛОНАСС/GPS и радиомодемом мощного цифрового радиоканала связи диапазона 450-470 МГц, соединенными через межмодульный интерфейс с модулем центральной обработки информации и с модулями памяти карты маршрута, индикации, регистрации, контроля бдительности машиниста и управления исполнительными цепями локомотива.
Известная система не обеспечивает необходимую надежность в определении местоположения поездов при нарушении условий приема радиосигналов от навигационных спутников систем ГЛОНАСС/GPS, электромагнитных помехах в цепях приемников сигналов АЛС и колесных датчиков пути, а также при отказах и сбоях, приводящих к ложной занятости рельсовых цепей автоблокировки.
Технический результат изобретения заключается в повышении надежности и достоверности определения координат текущего местоположения поездов.
Технический результат достигается тем, что в систему интервального регулирования движения поездов на перегоне, содержащую между постами с аппаратурой электрической централизации соседних станций n блок-участков с неограниченными рельсовыми цепями тональной частоты и проходными светофорами, каждые две соседние рельсовые цепи соединены с напольными устройствами сопряжения общего с соседней рельсовой цепью передающего конца и своего приемного конца, напольные устройства сопряжения приемных концов соединены через кабельную сеть с входами соответствующих приемников кодовых сигналов тональной частоты, напольные устройства сопряжения общего с соседней рельсовой цепью передающего конца соединены с передатчиками кодовых сигналов тональной частоты своих рельсовых цепей, приемники и передатчики размещены на ближайших к их блок-участкам постах с аппаратурой электрической централизации, на каждом локомотиве в состав его комплексного локомотивного устройства безопасности входят приемники автоматической локомотивной сигнализации непрерывного типа систем АЛС-ЕН и АЛСН, приемник точечного канала, приемникм систем спутниковой навигации ГЛОНАСС/GPS и радиомодем мощного цифрового радиоканала связи, которые соединены через межмодульный интерфейс с модулем центральной обработки информации, модулем памяти карты маршрута, модулем индикации, модулем регистрации, модулем контроля бдительности машиниста, модулем управления исполнительными цепями локомотива и модулем измерения пути и скорости, согласно изобретению введены и размещены на постах электрической централизации стационарные радиомодемы мощных цифровых радиоканалов связи, первые порты данных которых подключены к управляющим вычислительным комплексам своих постов электрической централизации, вторые порты данных соединены между собой через магистральную линию передачи данных, в комплексное локомотивное устройство безопасности введены и подключены к его межмодульному интерфейсу модуль формирования вторичных навигационных данных и модуль проверки соответствия вторичных навигационных данных.
В комплексное локомотивное устройство безопасности каждого из локомотивов может быть введен приемопередатчик маломощного цифрового канала радиосвязи диапазона ISM, связанный своим портом данных с его межмодульным интерфейсом, а последний вагон поезда может быть оборудован приемопередатчиком маломощного цифрового канала радиосвязи диапазона ISM.
На чертеже приведена структурная схема системы интервального регулирования движения поездов на перегоне.
Система интервального регулирования движения поездов на перегоне содержит между постами 1 и 2 с аппаратурой электрической централизации соседних станций n блок-участков 31-3n с неограниченными рельсовыми цепями тональной частоты и проходными светофорами 4, каждые две соседние рельсовые цепи соединены с напольными устройствами 5, 6 сопряжения общего с соседней рельсовой цепью передающего конца и своего приемного конца, напольные устройства 6 сопряжения приемных концов соединены через кабельную сеть 7 с входами соответствующих приемников 8 кодовых сигналов тональной частоты, напольные устройства 5 сопряжения общего с соседней рельсовой цепью передающего конца соединены с передатчиками 9 кодовых сигналов тональной частоты своих рельсовых цепей, приемники 8 и передатчики 9 размещены на ближайших к их блок-участкам (31-3n) постах 1 и 2 с аппаратурой электрической централизации, на каждом локомотиве 10 в состав его комплексного локомотивного устройства 11 безопасности входят приемники 12 и 13 автоматической локомотивной сигнализации непрерывного типа соответственно систем АЛС-ЕН и АЛСН, приемник 14 точечного канала, приемник 15 систем спутниковой навигации ГЛОНАСС/GPS и радиомодем 16 мощного цифрового радиоканала связи, которые соединены через межмодульный интерфейс 17 с модулем 18 центральной обработки информации, модулем 19 памяти карты маршрута, модулем 20 индикации, модулем 21 регистрации, модулем 22 контроля бдительности машиниста, модулем 23 управления исполнительными цепями локомотива и модулем 24 измерения пути и скорости, на постах 1 и 2 электрической централизации размещены стационарные радиомодемы 25 и 26 мощных цифровых радиоканалов связи, первые порты данных которых подключены к управляющим вычислительным комплексам 27 и 28 своих постов 1 и 2 электрической централизации, вторые порты данных соединены между собой через магистральную линию 29 передачи данных, в комплексное локомотивное устройство 11 безопасности введены и подключены к его межмодульному интерфейсу 17 модуль 30 формирования вторичных навигационных данных и модуль 31 проверки соответствия вторичных навигационных данных.
Система интервального регулирования движения поездов на перегоне работает следующим образом.
Во время движения по перегону радиомодемы 16 мощных цифровых радиоканалов связи локомотивов 10 соседних попутно и встречно следующих поездов через отдельные цифровые радиоканалы связи связаны друг с другом и связаны со стационарными радиомодемами 25 и 26 мощных цифровых радиоканалов связи постов 1 и 2 с аппаратурой электрической централизации станций, ограничивающих перегон в пределах дальности действия всех упомянутых радиомодемов. Установленный на локомотиве 10 приемопередатчик маломощного цифрового канала радиосвязи диапазона ISM (не показано) связан непрерывно с аналогичным приемопередатчиком ISM, установленным в последнем вагоне поезда, а во время сближения поездов на перегоне на расстояние устойчивой радиосвязи по этому каналу связывается с приемопередатчиками локомотивов 10 соседних и встречных поездов. Приемопередатчики связываются во время движения по перегону с ближайшими по расстоянию приемопередатчиками попутных нагоняющих поездов.
В комплексном локомотивном устройстве безопасности 11 (КЛУБ-У) каждого из локомотивов 10 все модули взаимодействуют друг с другом посредством открытого межмодульного системного интерфейса 17 типа CAN. Модуль 18 центральной обработки информации является основным модулем, реализующим технологический алгоритм системы:
- осуществляет взаимодействия с каналами поступления первичной информации от первичных датчиков (не показаны) приемника 12 автоматической локомотивной сигнализации непрерывного типа системы АЛС-ЕН и приемника 13 автоматической локомотивной сигнализации непрерывного типа системы АЛСН, приемника 14 точечного канала, приемника 15 спутниковой навигации и радиомодема 16 мощного цифрового радиоканала связи. Он также взаимодействует с модулем 19 памяти карты маршрута, модулем 20 индикации, модулем 21 регистрации, модулем 22 контроля бдительности машиниста, модулем 23 управления исполнительными цепями локомотива, модулем 24 измерения пути и скорости, модулем 30 формирования вторичных навигационных данных и модулем 31 проверки соответствия вторичных навигационных данных.
- реализует логические функции системы: контроль различных модулей системы, включение или выключение их из конфигурации по результатам контроля, контроль входных и выходных данных, формируемых в его двух каналах обработки, и осуществляет последующую выдачу этих данных на элементы безопасности и управления клапаном экстренного торможения (не показаны) входящими в модуль 23 управления исполнительными цепями локомотива.
При отсутствии поездов передатчики 9 через кабельную сеть 7 подают свои кодовые сигналы тональных частот в напольные устройства 5 сопряжения общих передающих концов, откуда они поступают в рельсовые цепи. Эти сигналы при свободности и исправности рельсовых цепей проходят через устройства 6 сопряжения и через кабельную сеть 7 в соответствующие приемники 8 кодовых сигналов тональной частоты, которые фиксируют свободность и исправность рельсовых путевых участков. Сигналы свободности и занятости рельсовых цепей отображаются на пультах (не показаны) операторов управляющих вычислительных комплексов 27 и 28 постов 1 и 2 электрической централизации.
При вступлении локомотива 10 на приемный конец рельсовой цепи очередного блок-участка 3i на вход его локомотивного приемника 12 системы АЛС-ЕН или приемника 13 системы АЛСН от передатчика автоматической локомотивной сигнализации навстречу движению локомотива 10 поступают коды с информацией о показаниях путевых светофоров 4, ограждающих следующие по ходу движения поезда блок- участки 3i+1. Разрешающие показания светофоров свидетельствуют, в том числе, об исправности рельсового пути соответствующих блок- участков. Передатчики кодов АЛС (отдельно не показаны, так как могут быть совмещены схемно и конструктивно с передатчиками 9) входят в состав аппаратуры на постах 1 и 2 электрической централизации и работают через кабельную сеть 7 аналогично передатчикам 9 кодовых сигналов тональной частоты для контроля рельсовых цепей.
Локомотивный приемник 12 или 13 преобразует кодовый сигнал в логические информационные сигналы, которые обрабатываются модулем 18 центральной обработки информации наряду с информацией о текущей координате локомотива 10, которая приходит от приемника 15 спутниковой навигации. Эта информация используется совместно с информацией от модуля 19 памяти карты маршрута для управления движением поезда. Система АЛС-ЕН обеспечивает передачу на локомотив 10 информации о состоянии пяти блок-участков перед локомотивом 10 поезда.
При каждом прохождении каждым локомотивом 10 очередной границы между смежными рельсовыми цепями на локомотиве 10 формируются цифровые телеграммы. Прохождение границы между смежными рельсовыми цепями на локомотиве при нормальной работе устройств кодирования рельсовых цепей определяется по смене кодового признака сигналов АЛС и одновременно по измеренному значению координаты приемником 15 спутниковой навигации с определением соответствия координат границы информации о координатах из модуля 19 памяти карты маршрута.
От локомотивов 10 через радиомодемы 16 по отдельным мощным радиоканалам цифровой связи и стационарные радиомодемы 25 и 26 в управляющие вычислительные комплексы 27 и 28 соответствующих постов 1 и 2 электрической централизации передаются и принимаются блоки разнообразных цифровых данных, используемых для управления движением. В частности, данные от приемника 15 системы спутниковой навигации ГЛОНАСС/GPS, модулей 30 формирования вторичных навигационных данных и модулей 31 проверки соответствия вторичных навигационных данных содержат текущие координаты местонахождения локомотива, номер его поезда, маршрут его следования, признак целостности состава и другие данные. При отсутствии радиосвязи с одним из радиомодемов 25 или 26 из-за большого расстояния локомотив 10 получает данные от другого радиомодема (25 или 26), связанных по магистральной линии 29 передачи данных.
При отказах и сбоях в работе аппаратуры контроля рельсовых цепей, вызывающих ложную занятость путевых участков, система переходит в резервный режим с сохранением возможности продолжения движения поездов на основании имеющейся информации о местоположении поездов от подсистем навигации.
Аппаратно-программная реализация модулей 30 и 31, входящих в подсистему навигации локомотивов 10, позволяет модулям, участвующим в сборе и обработке навигационной информации, работать асинхронно (по мере готовности новых навигационных данных) по отношению к работе модуля 18 центральной обработки информации, который непрерывно осуществляет обработку и проверку соответствия сигналов из каналов АЛСН и АЛС-ЕН и других сигналов реального времени. Кроме этого, аппаратно-программная реализация модулей 30 и 31 облегчает модернизацию уже установленной аппаратуры КЛУБ-У, поскольку КЛУБ-У имеет открытую модульную архитектуру. При модернизации аппаратуры КЛУБ-У достаточно только подключить новые модули к открытому межмодульному интерфейсу 17 и адаптировать программное обеспечение модуля 18 центральной обработки информации.
Модуль 31 проверки соответствия вторичных навигационных данных для обеспечения безопасности выполнен по принципам построения безопасной дублированной аппаратуры с самоконтролем, аналогично построению модуля 18 центральной обработки информации.Для максимального повышения достоверности и точности определения текущих координат местонахождения поездов навигационная информация, принимаемая на локомотивах 10 поездов, находящихся на перегоне и на постах 1 и 2 электрической централизации станций, ограничивающих перегон, проходит поэтапную обработку. Если координата определяется с запаздыванием по отношению к реальному времени, то текущая координата определяется интерполяцией на основе знания скорости и ускорения локомотива и текущего реального времени. Поскольку задержка, определяемая временем на каждый цикл программной обработки данных, невелика, интерполяция не вносит существенной погрешности в конечный результат и позволяет реализовать сложные многоступенчатые алгоритмы обработки, позволяющие оптимально использовать всю полезную информацию.
Первичная информация, используемая для определения диапазона координат местонахождения поездов, асинхронно поступает от следующих источников.
1. Каждую секунду, при нормальной работе приемника 15 систем спутниковой навигации ГЛОНАСС/GPS в локомотивные устройства, поступает обновленная навигационная информация, включающая глобальные трехмерные координаты местоположения, нормально определяемые с точностью до 30 М и соответствующее этим координатам точное глобальное время.
Однако в местах с сильными электромагнитными помехами (например, пересечения с ЛЭП), или в местах отсутствия или неустойчивой связи с искусственными спутниками (например, узкие лощины, тоннели) приемник ГЛОНАСС/GPS выдает информацию с ошибкой определения координаты до нескольких километров или вообще не выдает информацию.
2. В асинхронные моменты времени через радиомодем 16 в локомотивное устройство 11 от стационарных радиомодемов 25 и 26 или от радиомодемов 16 соседних локомотивов 10 поступает информация, собранная навигационными подсистемами соседних локомотивов 10. Эта информация включает данные от приемников 15 систем спутниковой навигации ГЛОНАСС/GPS, скорость, ускорение и направление движения, номер пути и текущей рельсовой цепи, историю проследования объектов железнодорожной инфраструктуры с известными координатами и историю проследования данными поездами мимо встречных и попутных поездов, а также априорную информацию, записанную перед рейсом в электронную память локомотивных устройств. Априорная информация используется, в частности, для целей проверки правильности аналогичной информации на соседних локомотивах и для целей отсева неверной информации, полученной в реальном времени. Информация, имеющая вероятностный характер, сопровождается оценками ее достоверности.
Радиообмен происходит с максимально возможной интенсивностью. Этому способствует увеличение количества параллельно используемых независимых каналов связи и скорость передачи данных по каждому каналу. В частности, радиомодем типа 1Р25СВ-2 „МОСТ" имеет 16 отдельных каналов с максимальной скоростью передачи по ним цифровых данных 9600 бит/сек. Однако информация может поступать реже, чем необходимо для нужной результирующей достоверности навигационных данных, из-за занятости каналов, высокого уровня помех в радиоэфире, или слабого уровня радиосигнала, уменьшающегося пропорционально квадрату расстояния между радиомодемами.
3. Аналогичная п.2 информация может приниматься приемопередатчиками (см., например, микросхему СС1101 Low-Power Sub-1 GHz RF Transceiver http://focus.ti.com/lit/ds/swrs061f/swrs061f.pdf) маломощного цифрового канала радиосвязи. Количество отдельных каналов в них может достигать 256 при максимальной скорости передачи 500 Кбит/сек. При работе с выходной мощностью до 10 мВт такая связь не требует лицензирования. Средняя дальность связи ограничена расстоянием 1-2 км.
Радиообмен происходит с максимально возможной интенсивностью. Из-за высокой скорости объемы передаваемой информации могут быть значительно больше, чем в случае мощных цифровых радиоканалов связи.
Однако информация по маломощным цифровым каналам радиосвязи также может поступать реже, чем необходимо для нужной достоверности навигационных данных, из-за занятости каналов, высокого уровня помех в радиоэфире или слабого уровня радиосигнала.
4. Непрерывно от колесных датчиков импульсов (не показаны) в модуль 24 измерения пути и скорости поступают импульсы с частотой, пропорциональной скорости вращения колеса, позволяющие рассчитать пройденный путь, скорость движения с точностью 0,1 м/сек и ускорение с точностью 0,1 м/сек2.
Пройденный путь определяется, в частности, по числу оборотов колес. Этот метод не точен, так как из-за износа бандажей колес, юза, или буксования колес происходит быстрое накопление ошибки, особенно при высоких скоростях движения поезда.
5. На локомотиве непрерывно принимаются кодовые сигналы АЛСН и/или АЛС-ЕН. По этим сигналам может быть определен интервал времени проследования границ рельсовых цепей и местонахождение и дистанция удаления впереди идущего поезда. Определение проследования границ рельсовых цепей фиксируется в КЛУБ-У по смене синхрогрупп принимаемых на локомотиве кодов АЛСН или же изменению периода кодового сигнала (см. RU 2290335). Кроме этого, в кодовом сигнале присутствует информация о номерах пути и рельсовой цепи. Дополнительным показателем прохождения колесами локомотива по питающим концам путевой аппаратуры АЛСН является резкое возрастание уровня сигнала в приемных катушках АЛСН.
Управляющий вычислительный комплекс 27 (28) может потерять проезд на маршруте при любом сбое путевой аппаратуры, особенно при сбое в работе рельсовых цепей. В этом случае восстановление нормальной работы системы управления (искусственная разделка маршрутов и приготовление новых маршрутов) возможно только на основе получения достоверной информации о текущей координате поездов от локомотивов 10.
6. Дополнительным источником навигационной информации является ручной ввод работниками локомотивной бригады информации о километре и пикете места нахождения локомотива 10 или другом однозначно опознанном локомотивной бригадой объекте железнодорожной инфраструктуры (стрелка, переезд, светофор, тоннель, мост и т д.)
7. Данные о длине и номере поезда могут быть получены также от систем «Пальма», КТСМ и других напольных систем, взаимодействующих с подвижным составом. Эта информация по радиосвязи поступает в управляющие вычислительные комплексы 27 и 28 и оттуда на локомотивы 10 в комплексное локомотивное устройство 11 безопасности для проверки правильности данных от навигационных подсистем.
8. Априорная информация, имеющаяся на каждом локомотиве 10 в его модуле 19 памяти карты маршрута, содержит данные о плане и профиле пути и длине сегментов пути, привязанные к железнодорожным и глобальным системам координат. Априорно известными являются записанные в модуле 19 памяти карты маршрута координаты границ рельсовых цепей с индивидуальными номерами этих рельсовых цепей, координаты стрелочных переводов и других характерных элементов путевой инфраструктуры. Другой априорной информацией являются занесенные перед рейсом в модуль 19 физические ограничения для данного поезда, по темпу набора и снижения скорости и максимальной развиваемой скорости. В модуле 19 хранится график движения поездов, из которого априорно известны номера и маршруты движения данного и соседних поездов и временные интервалы, в которых соседние поезда по расчетам должны оказаться рядом с данным поездом.
Поэтапная обработка навигационных данных устройством 11 на локомотиве 10 происходит в следующей последовательности.
Преобразование первичных навигационных данных во вторичные осуществляет модуль 30 формирования вторичных навигационных данных.
Блоки первичных навигационных данных реального времени проходят оптимальную фильтрацию для отсеивания неверных данных, обусловленных стохастическими мешающими факторами. Для оптимальной обработки данных реального времени используется, например, алгоритм цифрового фильтра Кальмана (пример такой обработки приведен в US 2005065726). Наборы первичных данных реального времени выбираются так, чтобы получить максимальное количество наиболее достоверных вторичных данных о текущей координате с количественными показателями их достоверности и степени взаимной корреляции.
Полученные блоки вторичных навигационных данных проходят тестирование в модуле 31 проверки соответствия вторичных навигационных данных априорно известным данным. В процессе тестирования вторичные навигационные данные сортируются по уровням достоверности и успешности прохождения тестов. Данные, не прошедшие основные проверки, стираются, а данные, прошедшие неосновные проверки, запоминаются для последующего извлечения из них полезной информации.
Примером использования априорной информации для проверки неправильных данных, полученных в реальном времени, может служить расчет максимальной дистанции, которую может пройти поезд за известный промежуток времени. Эта дистанция ограничена предельной скоростью и темпом набора скорости данным поездом. Если приращение координаты, определенное по приемнику ГЛОНАСС/GPS, окажется больше этого расчетного ограничения, то данные от приемника ГЛОНАСС/GPS не будут дальше использоваться для конечной оценки координаты местонахождения поезда. Подобным образом для тестирования данных используют данные о достоверном проследовании объектов и мест на пути следования с точно известными координатами.
Данные, прошедшие все основные проверки, используются для принятия решений по управлению движением поезда в модуле 18 центральной обработки информации в соответствии с допустимыми для этих решений уровнями расчетного риска. Оценки достоверности данных позволяют их комбинировать при принятии технологических решений разной степени ответственности.
Текущая координата местоположения локомотива, одновременно с приемом этой информации по приемнику ГЛОНАСС/GPS, вычисляется в устройстве 11 (КЛУБ-У) путем добавления пути, пройденного локомотивом 10 с момента времени прохождения достоверно известной координаты к этой достоверно известной координате.
Система позволяет повысить надежность обеспечения всех участников управления движением достоверной информацией о координатах местоположения поездов. Это достигается за счет повышения надежности работы навигационных систем и надежности передачи навигационной информации между локомотивами и центром управления за счет радиообмена навигационной информацией между соседними поездами, выполняющими при необходимости также и роль ретрансляторов в отсутствии надежной непосредственной связи по радио со станциями.
При отсутствии связи со станциями вообще сохраняющаяся связь между соседними поездами позволяет при достижении заданного уровня достоверности информации о координатах места нахождения локомотивов 10 локомотивным бригадам принимать более ответственные решения по управлению движением поездов. За счет этого снижаются возможные задержки в движении и повышается безопасность движения поездов.
Обмен информацией между поездами не только координатами, полученными по их приемникам ГЛОНАСС/GPS, но и другой навигационной информацией, полученной их независимыми друг от друга источниками информации, позволяет обеспечить дублирование многих ответственных функций и данных навигационных систем без усложнения существующей аппаратуры КЛУБ-У аппаратным дублированием.
В результате повышается безопасность информации модуля 19 памяти электронной карты маршрута локомотивов 10.
Проверка дистанции между встречными поездами может дополнительно осуществляться на основе приемопередатчиками маломощного цифрового канала радиосвязи диапазона ISM уровней принимаемых радиосигналов (параметр RSSI см. например, описание микросхемы СС1101 с.43). Этот уровень возрастает по квадратичному закону, по мере сокращения дистанции между поездами и позволяет четко зафиксировать их сближение в зоне до 100 метров.
Номера встречных и попутных поездов и номера путей, по которым они должны следовать, известны из графика движения, передаваемого локомотивам 10 из постов 1 и 2 электрической централизации, и являются дополнительной априорной информацией для контроля поездной ситуации, а подтверждение этой информации, отсылаемое с локомотивов 10 обратно на посты 1 и 2 электрической централизации, позволяет повысить надежность слежения за исполнением графика.
При использовании (см., например, US 2008243320) маломощного канала цифровой радиосвязи для контроля целостности поезда появляется дополнительная возможность высокоскоростного обмена информацией с соседними поездами попутного направления, если в качестве ретранслятора используется приемопередатчик, установленный в последнем вагоне поезда. В этом случае надежность и безопасность навигационной системы дополнительно повышена. Частый обмен информацией между соседними поездами при радиообмене приемопередатчиков о занимаемых ими путях, координатах местонахождения и скоростях движения позволяет дополнительно защититься от лобового столкновения и при радиообмене приемопередатчиков от столкновения из-за нагона.
Целостность данных при их передаче по цифровым каналам радиосвязи, между центрами управления и поездами, находящимися в соответствующих зонах радиопокрытия и между соседними поездами, находящимися в пределах установления между ними непосредственной радиосвязи, обеспечивается за счет применения криптографических протоколов и соответствующего управления ключами доступа. Ключи доступа распределяют серверы связи, входящие в состав управляющих вычислительных комплексов 27 и 28 постов 1 и 2 электрической централизации при формировании очередных маршрутных заданий, перед отправлением поездов на маршрут исходя из известной поездной ситуации и графиков движения.
Использование навигационных данных не только от навигационной подсистемы данного локомотива 10, но и от навигационных подсистем соседних локомотивов 10 позволяет без существенного усложнения существующей аппаратуры обеспечить повышение надежности и достоверности в определении координат текущего местоположения поездов, что важно для преодоления последствий сбоев и отказов в работе отдельных путевых и локомотивных устройств системы интервального регулирования движения поездов на перегоне.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система интервального регулирования движения поездов | 2021 |
|
RU2763082C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ С АВТОБЛОКИРОВКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491198C1 |
| Способ контроля состояния рельсовой линии и система интервального регулирования движения поездов на перегоне | 2021 |
|
RU2766015C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2008 |
|
RU2390453C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2503564C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2011 |
|
RU2499713C2 |
| Централизованная система контроля рельсовых цепей тональной частоты для высокоскоростного движения | 2015 |
|
RU2612053C1 |
| СТАНЦИОННОЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2015 |
|
RU2578638C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ И СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ЕЮ РЕАЛИЗУЕМЫЙ | 2014 |
|
RU2572278C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2012 |
|
RU2497704C2 |
Изобретение относится к области интервального регулирования движения поездов. Система интервального регулирования движения поездов на перегоне содержит блок-участки с рельсовыми цепями и проходными светофорами. Устройства сопряжения приемных концов рельсовых цепей соединены с приемниками кодовых сигналов, а устройства сопряжения общего с соседней рельсовой цепью передающего конца - с передатчиками. В состав КЛУБ входят приемники АЛСН, приемник точечного канала, приемник систем спутниковой навигации и радиомодем, которые соединены с модулями: центральной обработки информации, памяти карты маршрута, индикации, регистрации, контроля бдительности машиниста, управления исполнительными цепями локомотива и измерения пути и скорости. В систему введены и размещены на постах электрической централизации стационарные радиомодемы каналов связи, подключенные первыми портами к управляющим вычислительным комплексам своих постов. Вторые порты соединены между собой через магистральную линию передачи данных. В КЛУБ введены и подключены к его межмодульному интерфейсу модули формирования вторичных навигационных данных и проверки соответствия вторичных навигационных данных. Достигается повышение надежности системы. 1 ил.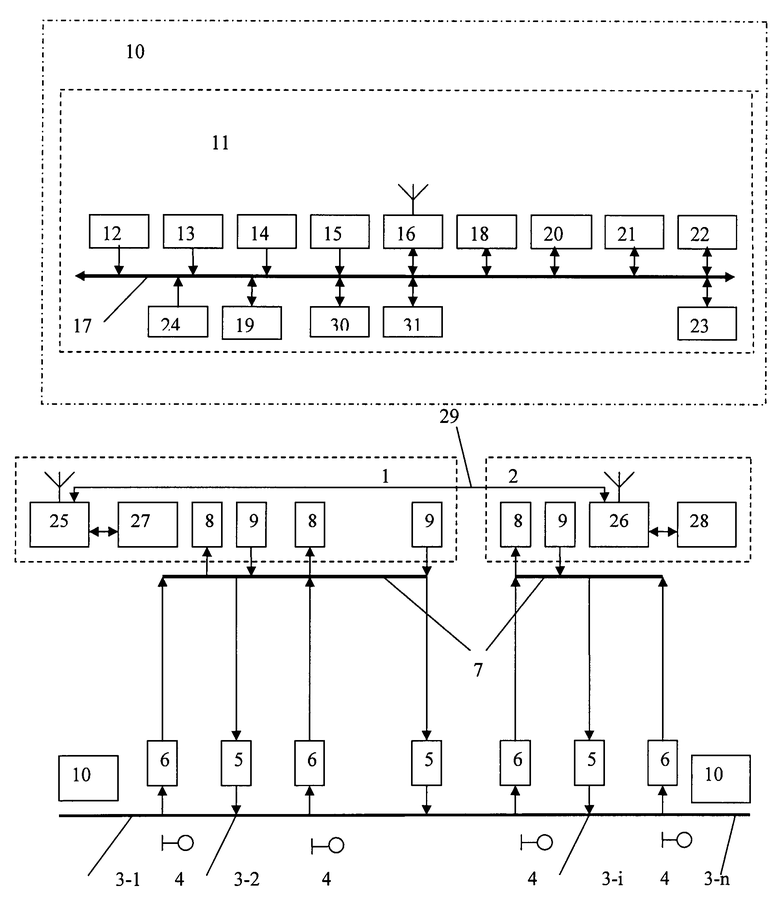
Система интервального регулирования движения поездов на перегоне, содержащая между постами с аппаратурой электрической централизации соседних станций n блок-участков с неограниченными рельсовыми цепями тональной частоты и проходными светофорами, каждые две соседние рельсовые цепи соединены с напольными устройствами сопряжения общего с соседней рельсовой цепью передающего конца и своего приемного конца, напольные устройства сопряжения приемных концов соединены через кабельную сеть с входами соответствующих приемников кодовых сигналов тональной частоты, напольные устройства сопряжения общего с соседней рельсовой цепью передающего конца соединены с передатчиками кодовых сигналов тональной частоты своих рельсовых цепей, приемники и передатчики размещены на ближайших к их блок-участкам постах с аппаратурой электрической централизации, на каждом локомотиве в состав его комплексного локомотивного устройства безопасности входят приемники автоматической локомотивной сигнализации непрерывного типа систем АЛС-ЕН и АЛСН, приемник точечного канала, приемник систем спутниковой навигации ГЛОНАСС/GPS и радиомодем мощного цифрового радиоканала связи, которые соединены через межмодульный интерфейс с модулем центральной обработки информации, модулем памяти карты маршрута, модулем индикации, модулем регистрации, модулем контроля бдительности машиниста, модулем управления исполнительными цепями локомотива и модулем измерения пути и скорости, отличающаяся тем, что в нее введены и размещены на постах электрической централизации стационарные радиомодемы мощных цифровых радиоканалов связи, первые порты данных которых подключены к управляющим вычислительным комплексам своих постов электрической централизации, вторые порты данных соединены между собой через магистральную линию передачи данных, в комплексное локомотивное устройство безопасности введены и подключены к его межмодульному интерфейсу модуль формирования вторичных навигационных данных и модуль проверки соответствия вторичных навигационных данных.
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2009 |
|
RU2423269C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2009 |
|
RU2392156C1 |
| Машина для автоматической мойки сушки и стабилизации температуры металлических изделий | 1950 |
|
SU93766A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2003 |
|
RU2249525C1 |

