Навигационная система для эндопротезирования тазобедренного сустава.
Изобретение относится к медицине, а именно к оперативной ортопедии и может быть использовано для ориентирования вертлужного и бедренного компонентов эндопротеза при их установке при операциях эндопротезирования тазобедренного сустава.
В настоящее время известны следующие устройства для ориентирования вертлужного компонента эндопротеза тазобедренного сустава при операции эндопротезирования.
Механическое навигационное устройство для ориентирования вертлужного компонента эндопротеза, описанное Improving Cup Positioning Using a Mechanical Navigation Instrument / Simon D. Steppacher MD, Jens H. Kowal PhD, Stephen Barry Murphy MD // Clin Orthop Relat Res. - 2011. - p. 423-428, содержит две бранши, соединенные между собой под углом, указатель и три каннюлированных штифта. Данное устройство позволяет определить ось, параллельно которой должна быть установлена ось импактора. Недостатком данного устройства является необходимость установки элементов устройства для навигации непосредственно на определенные точки костей таза, что соответственно, требует доступа к ним с повреждением мягких тканей, сосудисто-нервных пучков. Другим недостатком данного устройства является необходимость визуального определения параллельности осей импактора и направителя устройства, в связи с чем всегда присутствует погрешность.
Устройство для ориентирования положения чашки эндопротеза при эндопротезировании тазобедренного сустава, патент РФ на изобретение №2152764, состоит из трех взаимозакрепленных узлов и трех направителей, фиксированных под необходимыми углами к операционному столу, а также направителей самого устройства, которые в ходе операции должны быть параллельны в трех плоскостях направителям, фиксированным к операционному столу. Однако, поскольку установка импактора и определение его положения в пространстве осуществляется только по результатам визуального восприятия применяемой конструкции врачом (т.е. «на глазок»), при использовании данного способа всегда присутствует погрешность в определении положения чашки эндопротеза, величина которой определяется квалификацией врача, его физическим, эмоциональным состоянием во время проведения данной операции.
Таким образом, вышеуказанные аналоги могут быть использованы для установки лишь вертлужного компонента эндопротеза, не позволяют ориентировать бедренный компонент, и имеют низкую точность. В связи с тем, что в перечисленных аналогах определение положения вертлужного компонента эндопротеза определяется визуально, то всегда присутствует погрешность, величина которой определяется квалификацией врача, его физическим, эмоциональным состоянием во время проведения данной операции. Кроме того, все вышеуказанные устройства не позволяют определять такие необходимые параметры для установки компонентов эндопротеза, как офсет, длина конечности, амплитуда движений в суставе и другие.
Известна оптическая навигационная система OrthoPilot (OrthoPilot cup navigation - how to optimise cup positioning? / Hartmuth Kiefer // International Orthopaedics (SICOT) (2003) 27 (Suppl. 1): S37-S42), содержащая датчик, закрепленный на указателе для контакта с определенными костными ориентирами, бесштифтовую референтную матрицу, датчики, зафиксированные на инструментах для установки компонентов эндопротеза и на бесштифтовой референтной матрице, персональный компьютер.
Указанная навигационная система использует данные, получаемые от инфракрасных датчиков, представляющих собой отражающие маркерные сферы. При обработке этих данных компьютер производит расчет навигационных параметров, таких как углы инклинации и антеверсии, офсет, длина конечности и других, необходимых для установки компонентов эндопротеза. Результаты отображаются на экране компьютера в ходе операции в виде графических элементов и числовых параметров.
Недостатками данной навигационной системы для эндопротезирования тазобедренного сустава являются следующие.
1. Необходимость установки датчиков в крыло подвздошной кости и в дистальный отдел бедренной кости влечет дополнительное повреждение кожи, подлежащих мягких тканей, сосудисто-нервных пучков, соответствующих костей и повышает риск развития инфекционных осложнений, а также увеличивает продолжительность операции.
В данной системе имеется возможность установки бедренного датчика на референтную матрицу, фиксированную на коже бедра без повреждения мягких тканей. Возможна также фиксация референтной матрицы и «тазового» датчика при помощи стержня, ввинчиваемого над верхним краем вертлужной впадины. Однако в данном случае при обработке самой вертлужной впадины развертками возможно повреждение вышеуказанного стержня и изменение положения датчика, что приведет к неправильной ориентации вертлужного компонента эндопротеза и повреждению самой развертки. При установке вышеуказанного стержня на большем расстоянии от верхнего края вертлужной впадины (для предотвращения контакта с разверткой) происходит дополнительное повреждение мягких тканей. Установка датчика в данную позицию в связи с непосредственной близостью к области оперативного вмешательства сопряжена с большой вероятностью механического повреждения или смещения датчика во время операции.
2. При использовании данной навигационной системы инфракрасные лучи, испускаемые излучателями, отражаются от отражающих маркерных сфер и попадают на камеру. Недостатком данного метода передачи данных является необходимость отсутствия яркого освещения и отражающих предметов в области оперативного вмешательства, поскольку вышеперечисленные факторы могут привести к недостаточно точным измерениям. Во время процедуры операционное поле должно быть открыто для обзора обоими объективами камеры, что создает определенные неудобства для хирургов, которые во время проведения операции будут вынуждены отходить от операционного стола для того, чтобы не «перекрывать» сигналы инфракрасного света.
3. Отсутствие возможности контроля усилия при установке (забивании) вертлужного и бедренного компонентов эндопротеза (при фиксации «press-fit»), что может вызвать повреждение тазовой кости и проксимального отдела бедренной кости.
4. Недостаточная точность позиционирования компонентов эндопротеза при выраженных изменениях вертлужной впадины (дисплазия, дефекты различного генеза). При наличии у больного хорошо выраженной подкожной жировой клетчатки, она не позволяет достаточно точно устанавливать датчик, закрепленный на указателе, на соответствующие костные ориентиры, что приводит к снижению точности установки имплантатов. Для повышения точности в данном случае требуется установка датчика, закрепленного на указателе под контролем ультразвука, что увеличивает продолжительность операции (Olaf Hasart et al. Influence of body mass index and thickness of softtissue on accuracy of ultrasound and pointer based registration in navigation of cup in hip arthroplasty. - Technology and Health Care 18 (2010): 341-351).
Наиболее близким из известных навигационных систем для эндопротезирования тазобедренного сустава является навигационная система для эндопротезирования тазобедренного сустава, раскрытая в системе детектирования параметров тела US 2011213221 A1, 01.09.2011 Д1, содержащая датчики, которые фиксируются на различных костях тела человека, каждый из которых включает МЭМС-систему, связанную беспроводным образом с разъемом ПК (прием и передача в радиоволновом диапазоне). Недостатками данной навигационной системы являются следующие.
1. Также как и в оптических навигационных системах, в данной системе требуется установка датчиков в тазовую и бедренную кости путем введения в них соответствующих стержней, на которых располагаются датчики (фиг. 72-75, 77), что влечет дополнительное повреждение в первую очередь костей (снижает их прочность), а также кожи, подлежащих мягких тканей, сосудисто-нервных пучков, повышает риск развития инфекционных осложнений.
2. Отсутствие возможности контроля усилия при установке (забивании) вертлужного и бедренного компонентов эндопротеза (при фиксации «press-fit»), что может вызвать повреждение тазовой кости и проксимального отдела бедренной кости.
3. Необходимость установки стержней, на которых располагаются датчики, в бедренную тазовую кости, и их последующее удаление приводит к увеличению продолжительности операции.
Задача изобретения: исключение повреждений мягких тканей, сосудисто-нервных пучков, костей, предотвращение повреждения вертлужной впадины и бедренной кости (интраоперационного перелома), сокращение продолжительности операции.
Для решения поставленной задачи в известной навигационной системе для эндопротезирования тазобедренного сустава, содержащей персональный компьютер, датчики пространственного положения, зафиксированные на направителе для установки вертлужного компонентов эндопротеза, направителе для установки бедренного компонента эндопротеза, фрезе, развертке для обработки костно-мозгового канала, рукоятке для крепления рашпилей, каждый из которых включает МЭМС-систему, связанную беспроводным образом с разъемом персонального компьютера, источник питания дополнительно введены бесштифтовая референтная матрица, выполненная с возможностью установки вдоль анатомической оси голени, датчик пространственного положения, расположенный на бесштифтовой референтной матрице, два лазерных излучателя для определения длины конечности, закрепленные на первом штативе при помощи шарниров таким образом, что имеется возможность изменения направления лазерных лучей в трехмерном пространстве и фиксации положения этих излучателей, два лазерных излучателя для определения офсета, закрепленные на втором штативе при помощи шарниров таким образом, что имеется возможность изменения направления лазерных лучей в трехмерном пространстве и фиксации положения этих излучателей.
При изучении других известных технических решений в данной области медицины указанная совокупность признаков, отличающая изобретение от прототипа, не была выявлена.
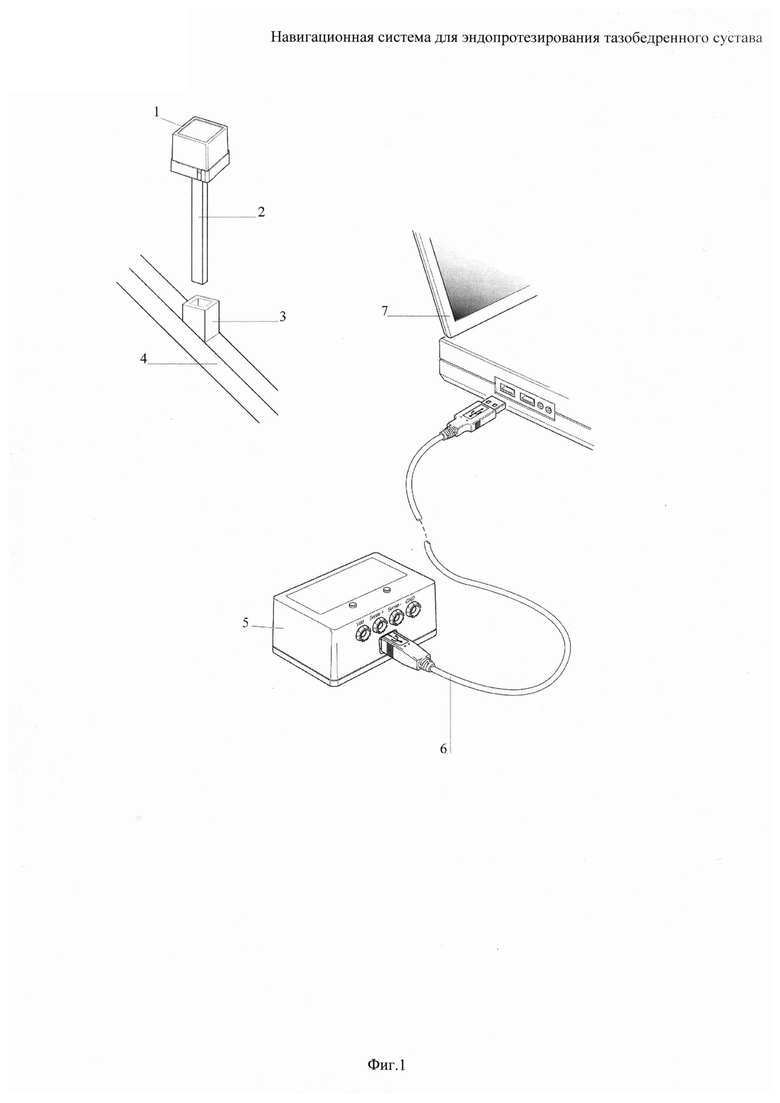
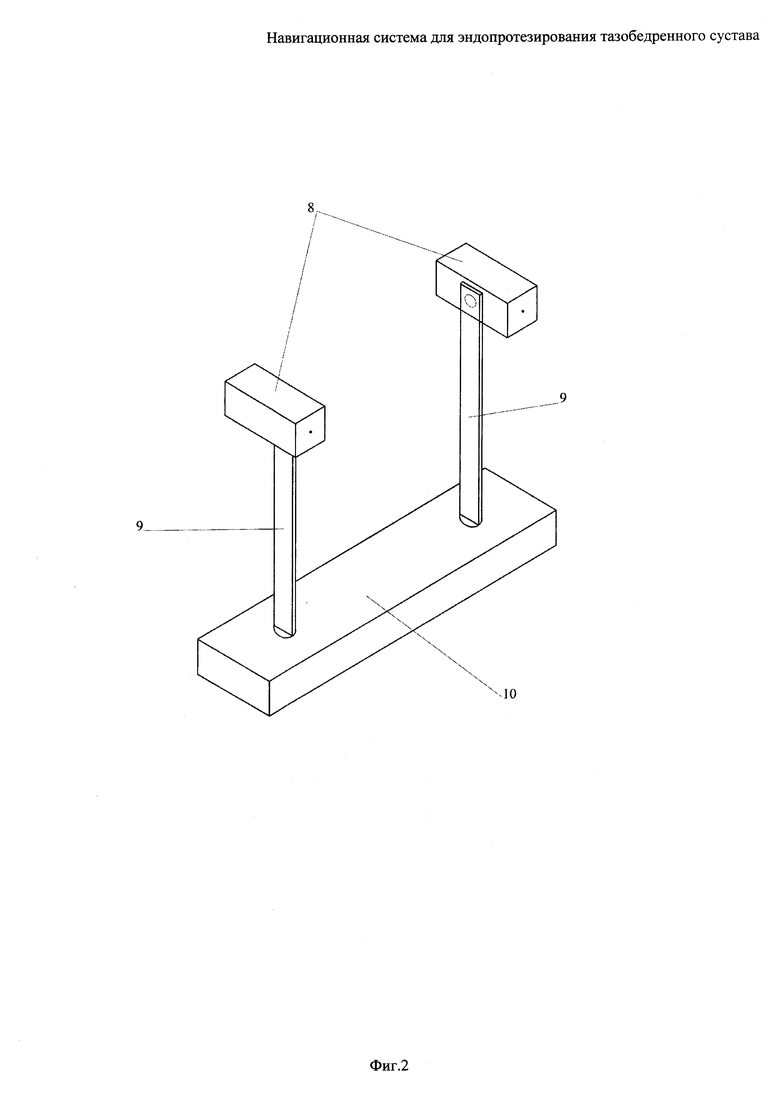
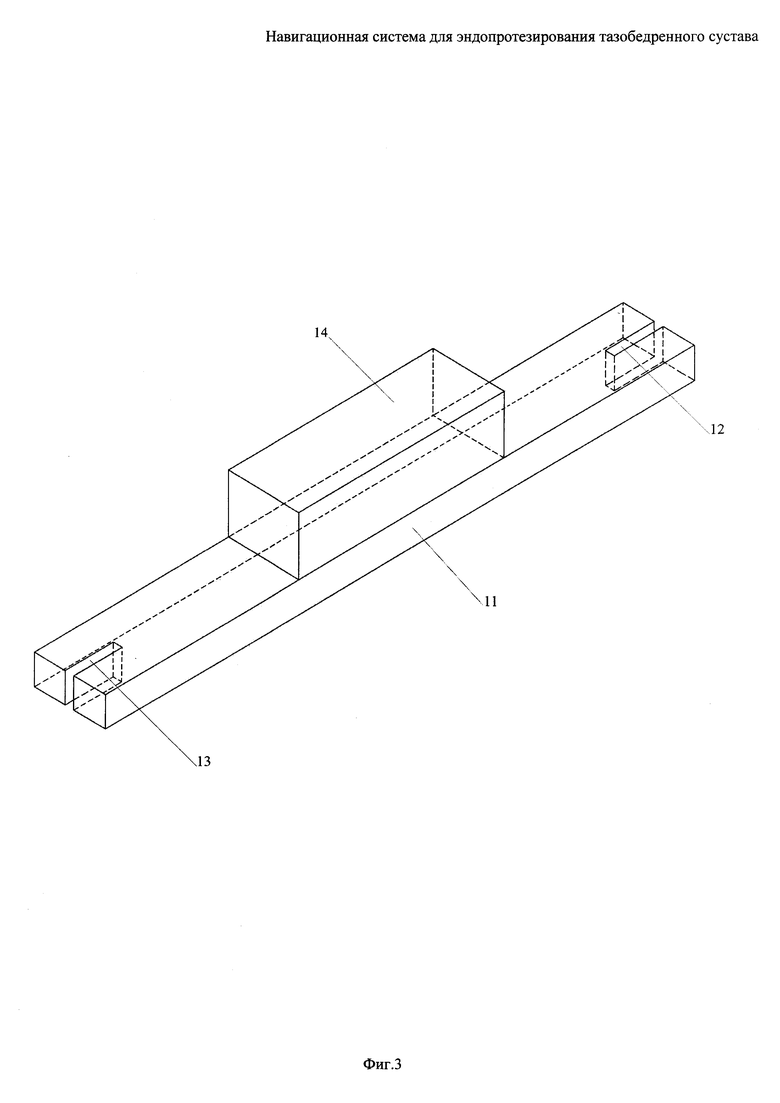
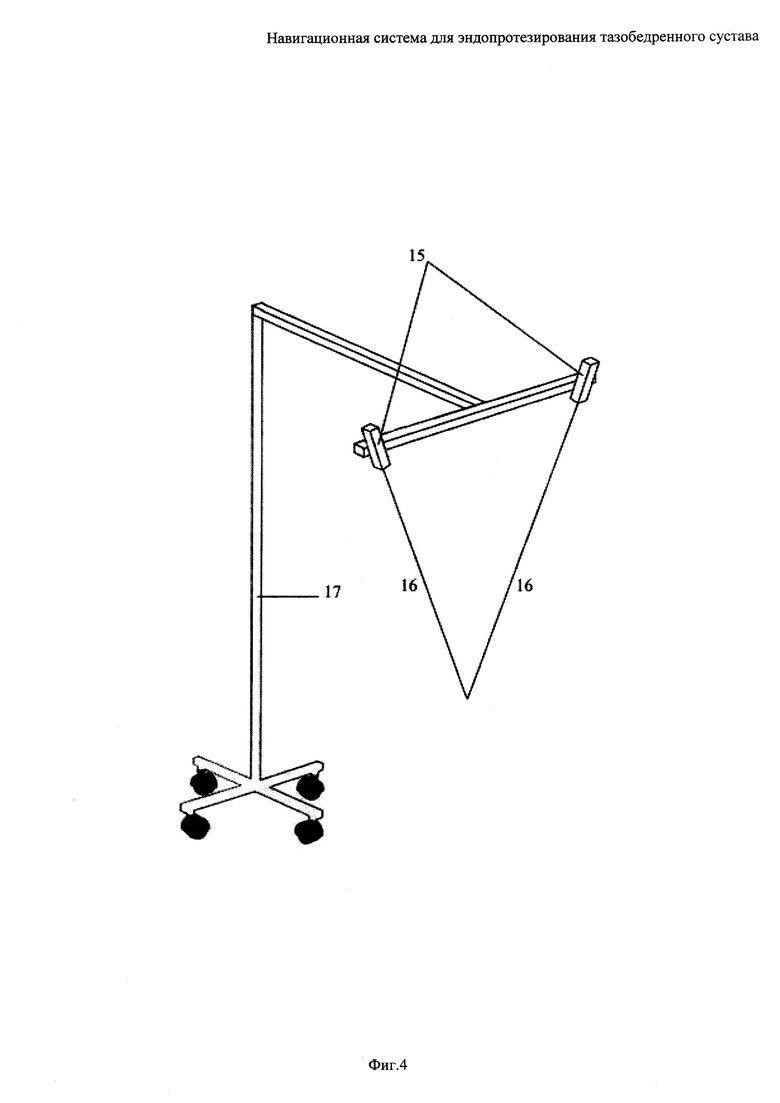
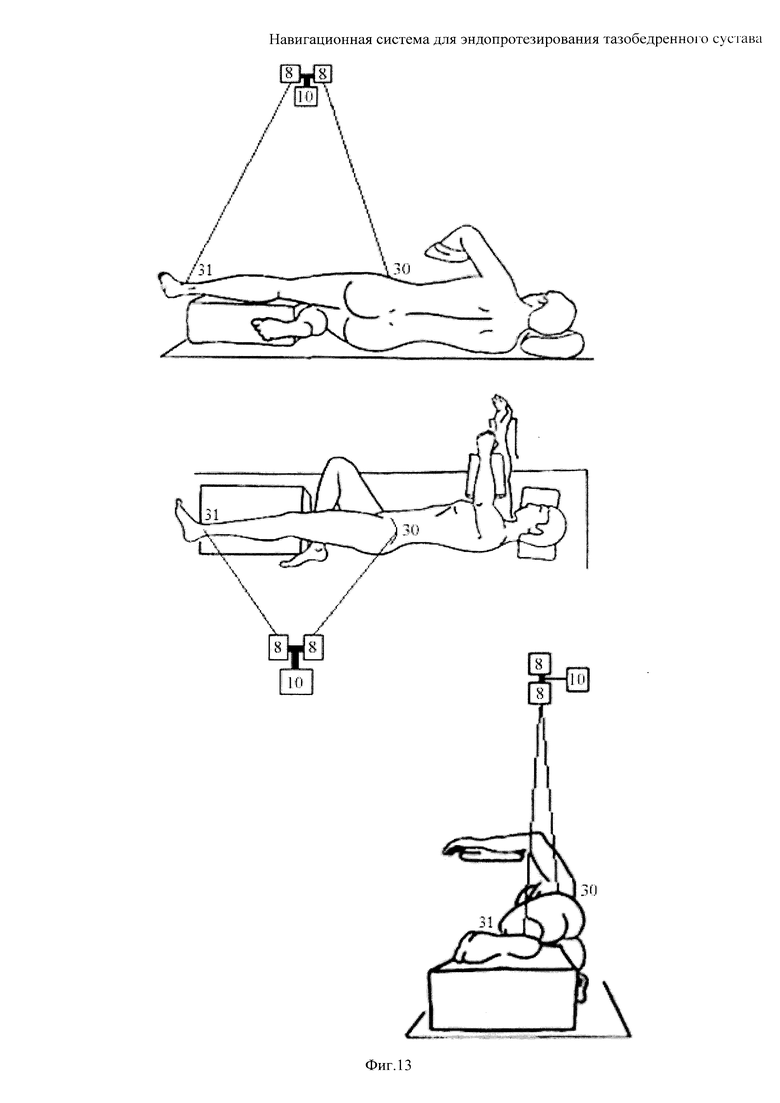
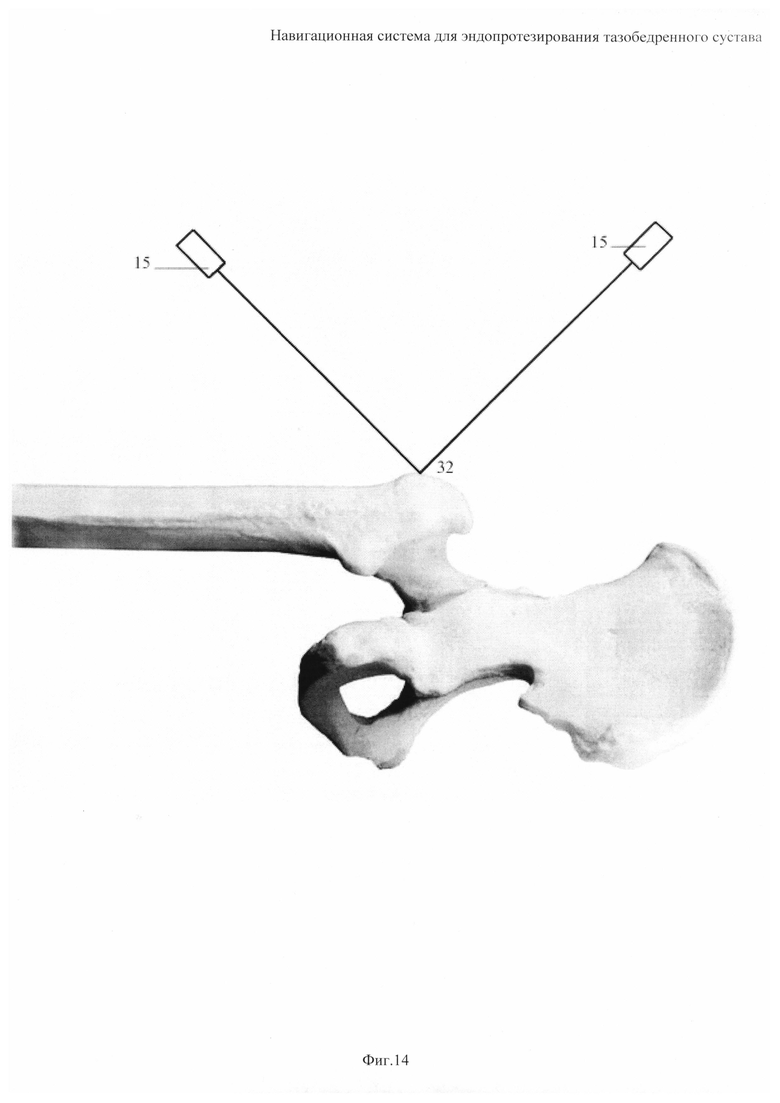
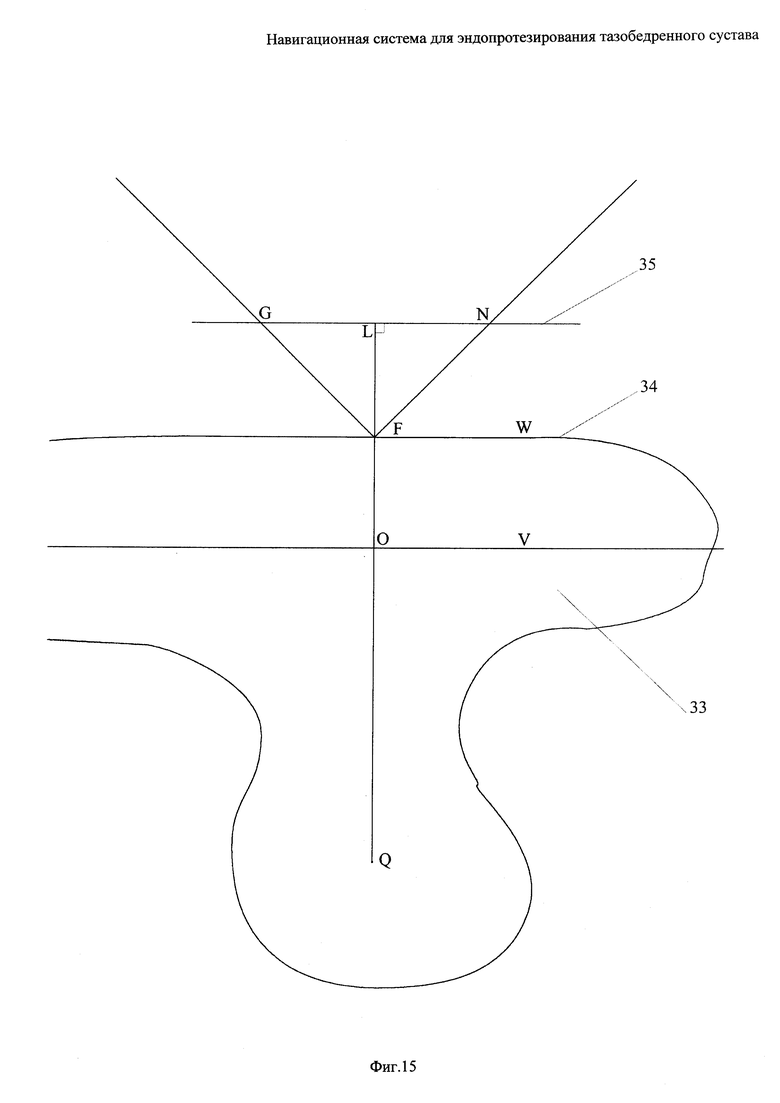
На фиг. 1 приведены компоненты навигационной системы для эндопротезирования тазобедренного сустава в масштабе 1:5, на фиг. 2 - лазерные излучатели для определения длины конечности, соединенные со штативом в масштабе 1:1, на фиг. 3 - структурная схема датчика пространственного положения, фиксированного на бесштифтовой референтной матрице в масштабе 1:1, на фиг. 4 - лазерные излучатели для определения офсета, соединенные со штативом в масштабе 1:10, на фиг. 5 - фиксатор для датчика пространственного положения в масштабе 1:1, на фиг. 6 - датчик пространственного положения, фиксированный на развертке для обработки костномозгового канала, масштаб 1:2, на фиг. 7 - расположение больного на операционном столе, на фиг. 8 - расположение датчика пространственного положения, фиксированного на бесштифтовой референтной матрице на голени, на фиг. 9 - схема установки вертлужного компонента эндопротеза, на фиг. 10 - расположение пациента и компонентов навигационной системы при установке бедренного компонента эндопротеза вид сбоку, на фиг. 11 - расположение пациента и компонентов навигационной системы при установке бедренного компонента эндопротеза вид сверху, на фиг. 12 - схема определения антеторсии шейки бедренной кости, на фиг. 13 - схема расположения компонентов навигационной системы при определении длины нижней конечности, на фиг. 14 - схема расположения компонентов навигационной системы при определении офсета, на фиг. 15 - схема определения офсета.
На фиг. 1 приняты следующие обозначения:
1 - датчик пространственного положения, фиксированный на направителе;
2 - фиксатор;
3 - гнездо направителя для фиксатора;
4 - направитель для установки вертлужного компонента эндопротеза;
5 - радиоприемник;
6 - USB-интерфейс;
7 - персональный компьютер.
На фиг. 2 приняты следующие обозначения:
8 - лазерный излучатель для определения длины конечности;
9 - шарнир;
10 - штатив.
На фиг. 3 приняты следующие обозначения:
11 - бесштифтовая референтная матрица;
12 - верхний паз;
13 - нижний паз;
14 - датчик пространственного положения, фиксированный на бесштифтовой референтной матрице.
На фиг. 4 приняты следующие обозначения:
15 - лазерный излучатель для определения офсета;
16 -лазерные лучи;
17 - штатив.
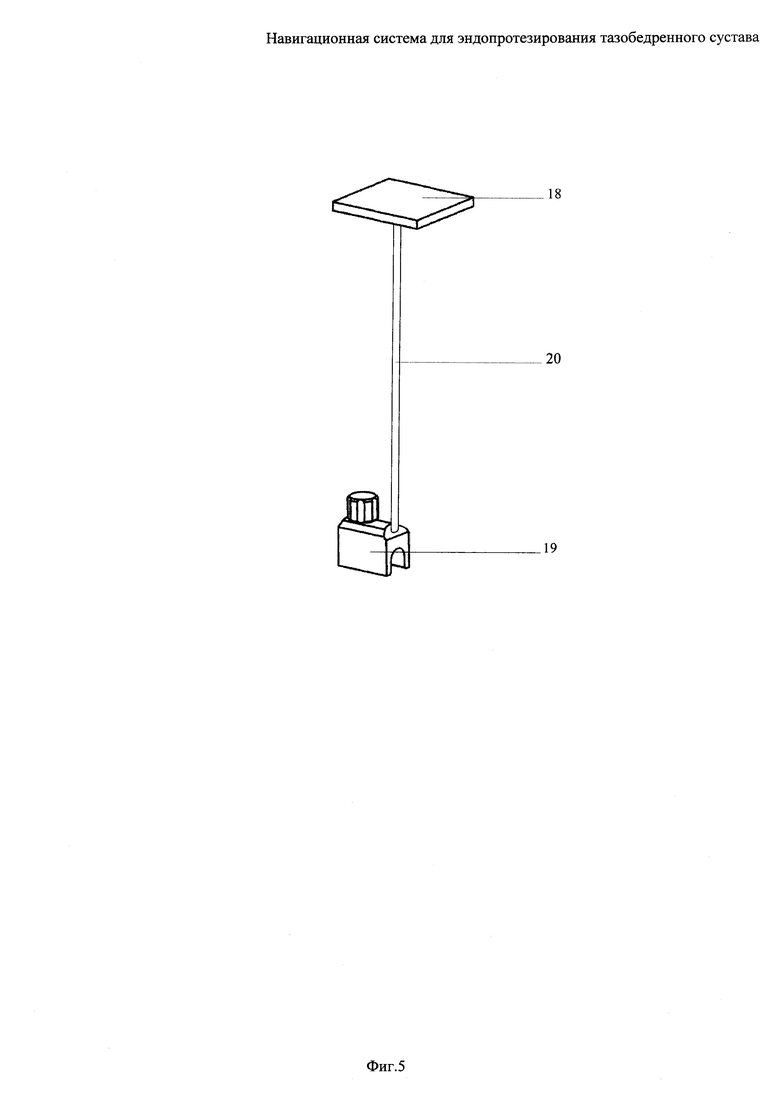
На фиг. 5 приняты следующие обозначения:
20 - фиксатор для датчика пространственного положения;
18 - платформа фиксатора;
19 - крепление фиксатора.
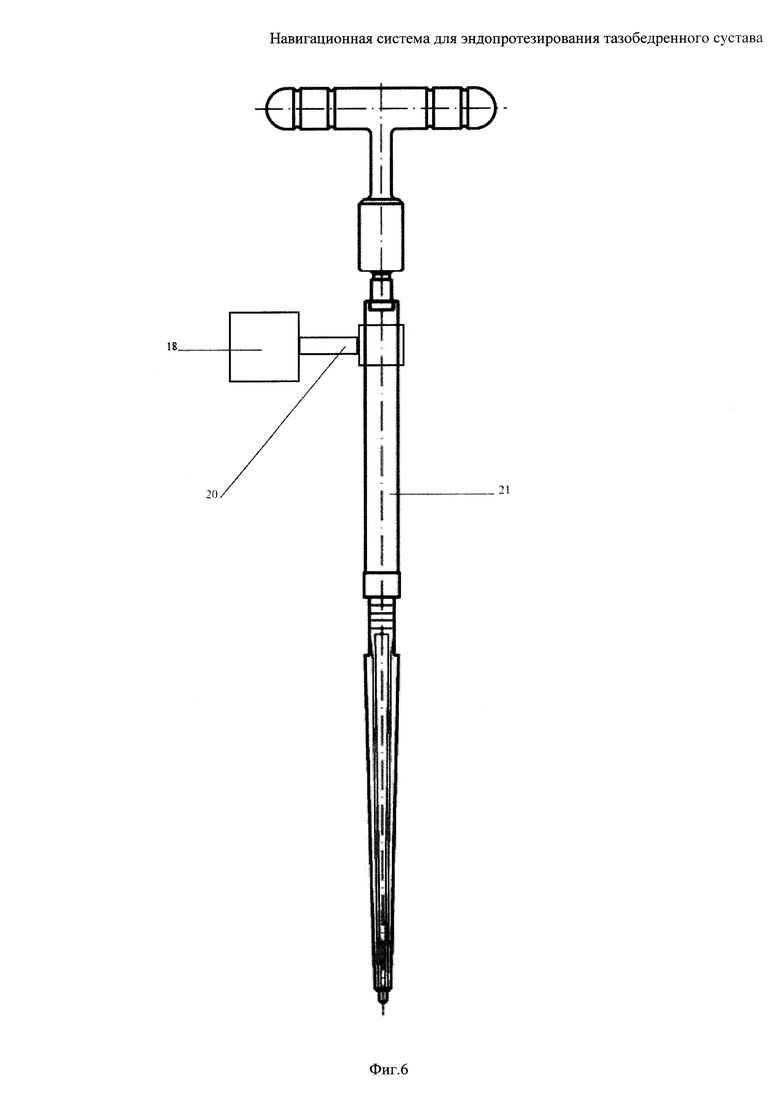
На фиг. 6 приняты следующие обозначения:
18 - датчик пространственного положения, фиксированный на развертке для обработки костномозгового канала;
20 - фиксатор для датчика пространственного положения;
21 - развертка для обработки костномозгового канала.
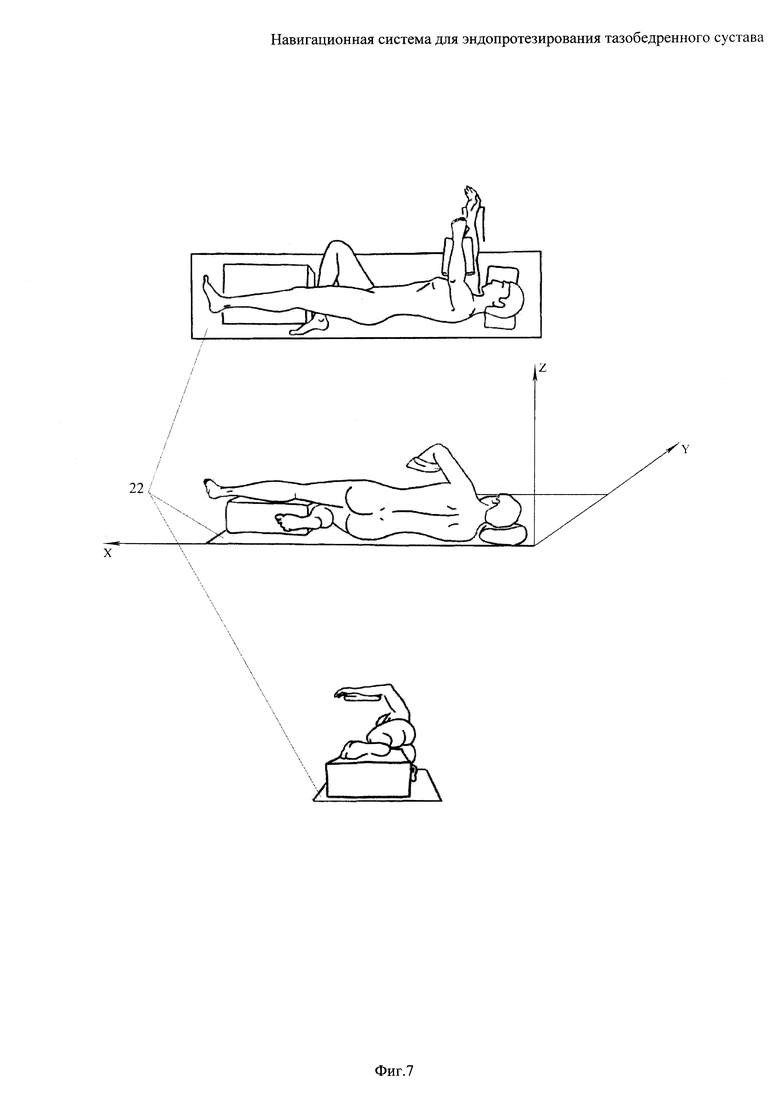
На фиг. 7 приняты следующие обозначения:
22 - операционный стол.
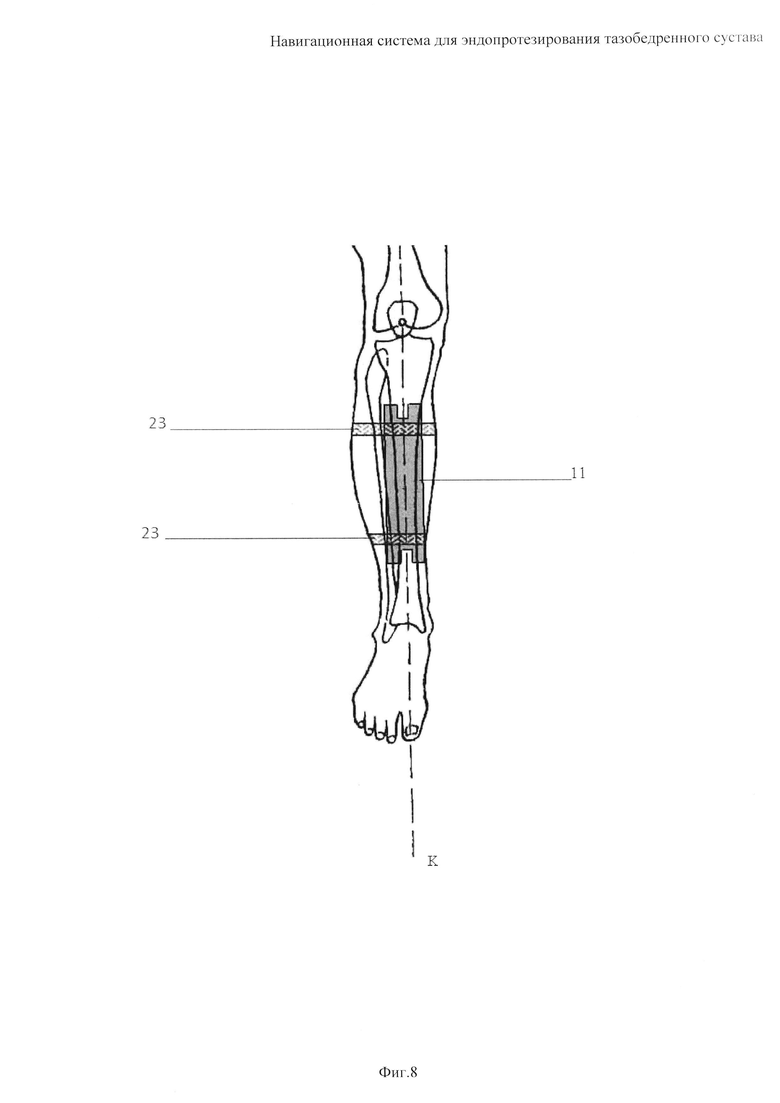
На фиг. 8 приняты следующие обозначения:
11 - бесштифтовая референтная матрица;
23 - лейкопластырная повязка;
К - анатомическая ось нижней конечности.
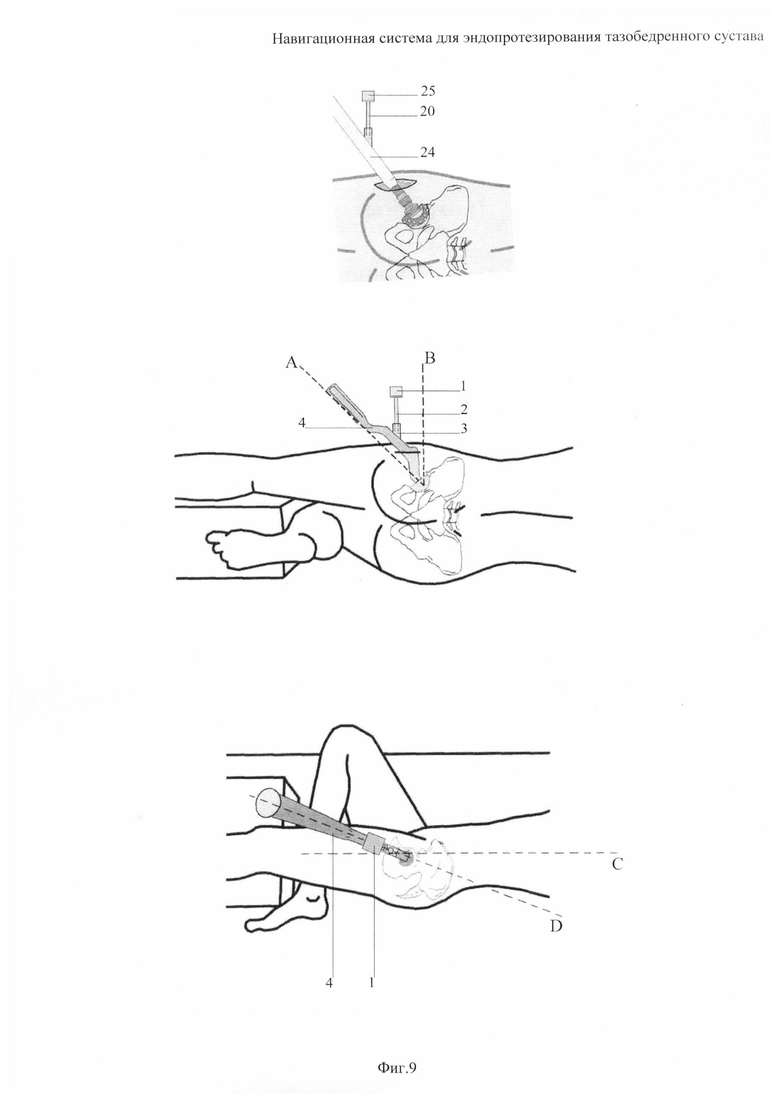
На фиг. 9 приняты следующие обозначения:
1 - датчик пространственного положения, фиксированный на направителе;
2 - фиксатор;
3 - гнездо направителя для фиксатора;
4 - направитель;
17 - фиксатор для датчика;
24 - фреза сферическая для обработки вертлужной впадины;
25 - датчик пространственного положения, фиксированный на фрезе;
А - ось направителя (проекция во фронтальной плоскости);
В - вертикальная ось;
С - продольная ось тела;
D - ось направителя (проекция в сагиттальной плоскости).
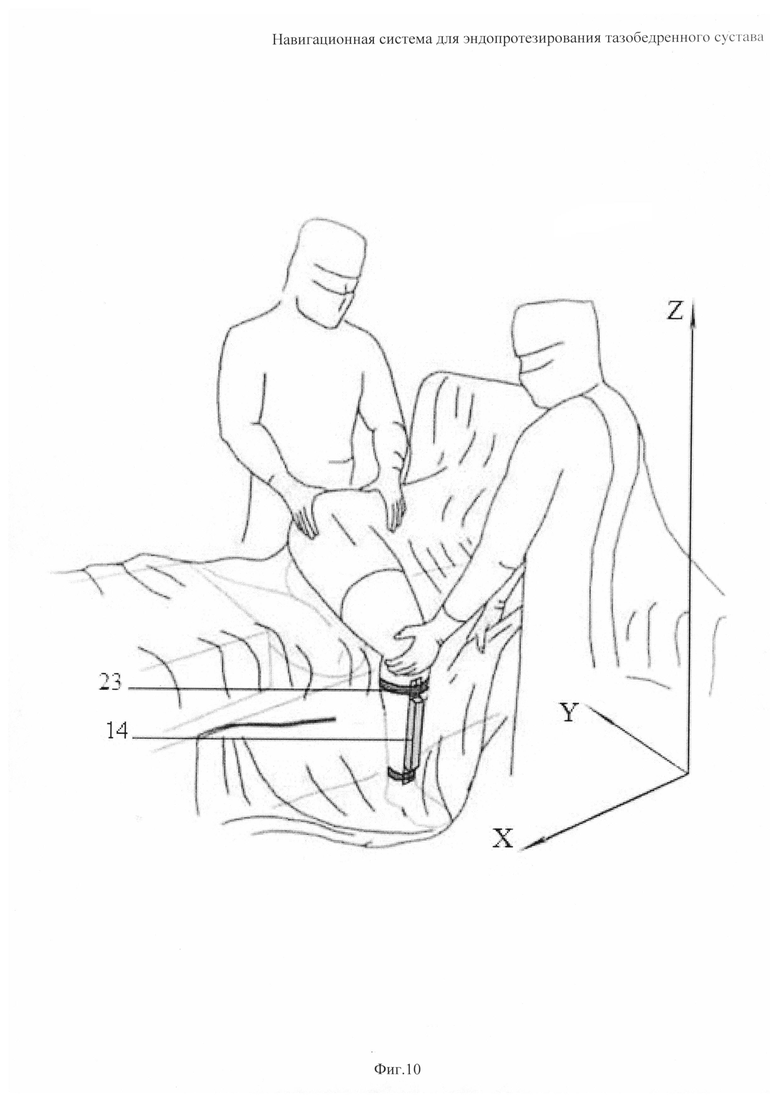
На фиг. 10 приняты следующие обозначения:
14 - датчик пространственного положения, фиксированный на бесштифтовой референтной матрице;
23 - лейкопластырная повязка.
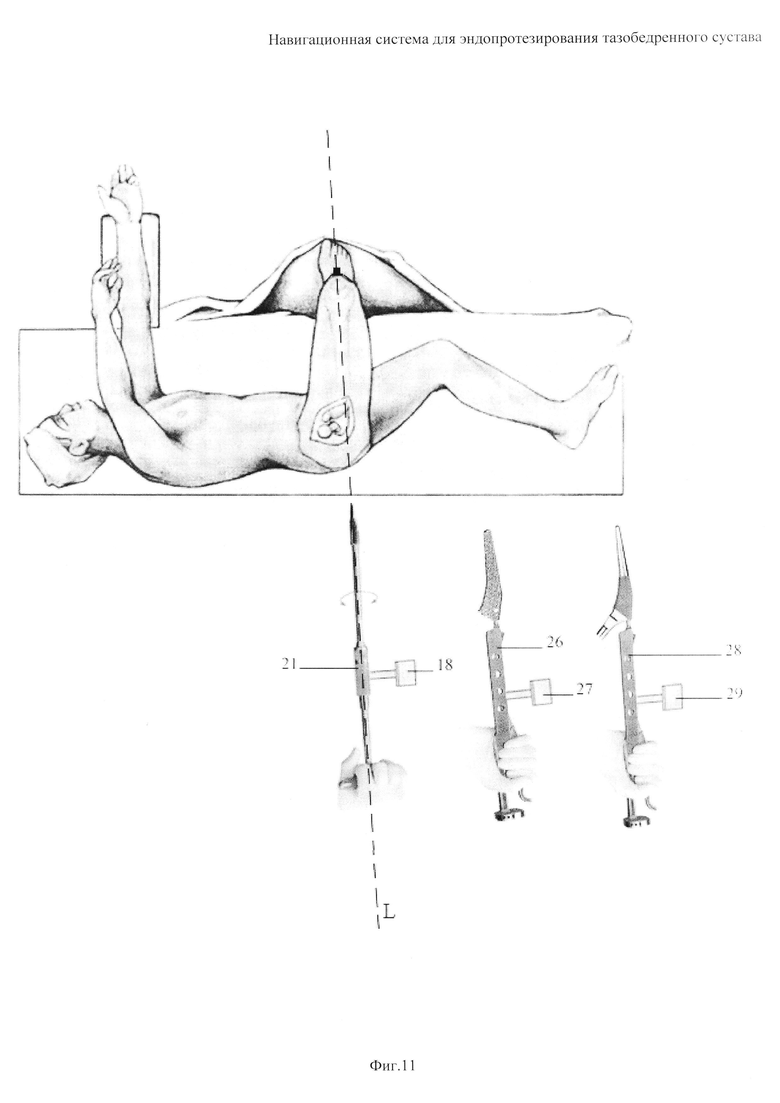
На фиг. 11 приняты следующие обозначения:
18 - датчик пространственного положения, фиксированный на развертке для обработки костномозгового канала;
21 - развертка для обработки костномозгового канала;
26 - рукоятка для крепления рашпилей;
27 - датчик пространственного положения, фиксированный на рукоятке для крепления рашпилей;
28 - направитель для установки бедренного компонента эндопротеза;
29 - датчик пространственного положения, фиксированный на направителе для установки бедренного компонента;
L - ось бедренной кости.
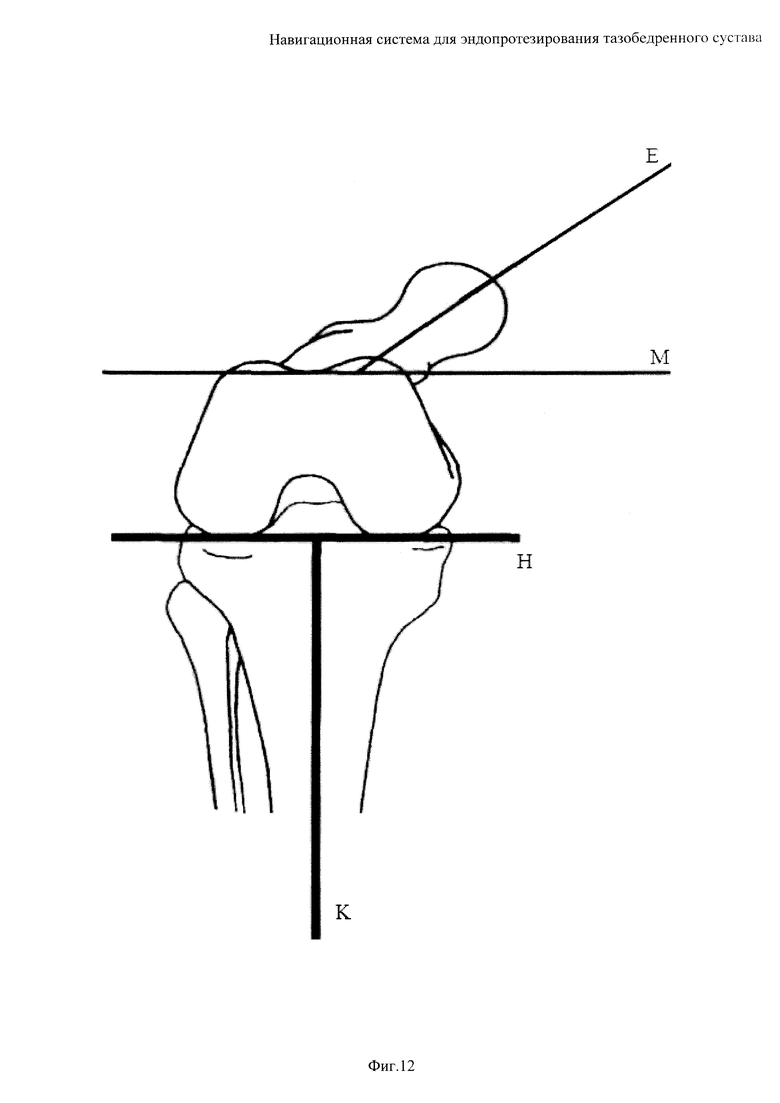
На фиг. 12 приняты следующие обозначения:
Е - ось шейки бедренной кости;
Н - транскондилярная ось;
М - ось, параллельная транскондилярной оси;
К - анатомическая ось нижней конечности.
На фиг. 13 приняты следующие обозначения:
8 - лазерный излучатель для определения длины конечности;
10 - штатив;
30 - точка падения лазерного луча на крыле подвздошной кости;
31 - точка падения лазерного луча на наружной лодыжке.
На фиг. 14 приняты следующие обозначения:
15 - лазерный излучатель для определения офсета;
32 - точка падения лазерных лучей на большой вертел.
На фиг. 15 приняты следующие обозначения:
33 - бедренная кость;
34 - кортикальный слой большого вертела бедренной кости до удаления головки бедренной кости;
35 - кортикальный слой большого вертела бедренной кости после установки пробной тест-головки.
Заявляемая навигационная система для эндопротезирования тазобедренного сустава содержит датчики пространственного положения, каждый из которых включает МЭМС-систему (микроэлектромеханические системы - гироскоп и акселерометр), связанную беспроводным образом с разъемом персонального компьютера 7, источник питания.
Датчик пространственного положения 1, фиксированный на направителе для установки вертлужного компонента эндопротеза 4 при помощи фиксатора 2, устанавливается в стандартное гнездо направителя для фиксатора 3, фиг. 1.
Датчик пространственного положения 14, фиксированный на бесштифтовой референтной матрице 11, неподвижно соединен с бесштифтовой референтной матрицей 11, выполненной в виде параллелепипеда с широким основанием и наличием верхнего паза 12 и нижнего паза 13, фиг. 3.
Датчики пространственного положения, фиксированные на инструментах для установки компонентов эндопротеза неподвижно соединяются с фиксатором для датчика 20, состоящим из платформы фиксатора 18 и крепления фиксатора 19, фиг. 5.
Датчик пространственного положения 18, фиксированный на развертке для обработки костномозгового канала 21 неподвижно соединен с разверткой для обработки костномозгового канала 21 при помощи фиксатора для датчика 20, фиг. 6, 11. Аналогично устанавливаются соответствующие датчики пространственного положения на другие инструменты для установки бедренного компонента эндопротеза. На рукоятку для крепления рашпилей 26, устанавливается датчик пространственного положения 27, фиксированный на рукоятке для крепления рашпилей, на направитель для установки бедренного компонента эндопротеза 28 устанавливается датчик пространственного положения 29, фиксированный на направителе для установки бедренного компонента эндопротеза. Последние два устанавливаются таким образом, чтобы они находились с одной и той же стороны соответствующих инструментов, причем ось фиксатора была перпендикулярна длинной оси инструмента, фиг. 11.
Лазерные излучатели для определения длины конечности 8 соединены со штативом 10 при помощи шарниров 9 таким образом, чтобы имелась возможность изменять направление лазерного луча в трехмерном пространстве и жестко фиксировать положение излучателей, фиг. 2.
Лазерные излучатели для определения офсета 15 соединены со штативом 17 при помощи шарниров 9 (на фиг. 4, шарниры не показаны).
Радиоприемник 5 соединен с персональным компьютером 7 через USB-интерфейс 6, фиг. 1.
Составные части заявляемой навигационной системы для эндопротезирования тазобедренного сустава могут быть реализованы следующим образом.
Все датчики пространственного положения, применяемые в заявляемой системе, могут быть выполнены в виде МЭМС-системы, например, инерциальный модуль STIM300 (разработка компании Sensnor AS).
Прием и передача данных в радиоволновом диапазоне может осуществляться посредством радиоприемника 5, который представляет собой типовой приемник стандарта IEEE 802.11, соединенный с персональным компьютером 7 посредством USB-интерфейса 6.
Элементы питания могут быть представлены серебряно-цинковыми аккумуляторами.
Фиксатор для датчика пространственного положения 20, представляет собой металлический стержень, неподвижно соединенный (например, посредством сварки) с платформой 18 и креплением фиксатора 19, фиг. 5. Соединение каждого датчика и фиксатора может осуществляться при помощи болтов.
Фиксатор 2 устанавливается в стандартное гнездо направителя 4, т.е. форма нижнего конца фиксатора должна соответствовать гнезду направителя 3.
Бесштифтовая референтная матрица 11 может быть выполнена в виде металлической пластины с жестко фиксированным на ней датчиком пространственного положения 14.
Инструменты для установки компонентов эндопротеза, обработки костей представляют собой типовые инструменты, применяемые в ортопедии при операциях эндопротезирования тазобедренного сустава.
Программное обеспечение персонального компьютера 7 выполняет функции обработки получаемых данных с датчиков, расчета необходимых параметров и вывода их на экран дисплея в виде числовых и графических элементов.
Принцип работы заявляемой навигационной системы для эндопротезирования тазобедренного сустава заключается в следующем.
Эндопротезирование тазобедренного сустава выполняется в положении больного на "здоровом" боку. Таз пациента перед операцией жестко фиксируется на операционном столе 22 (установленном по уровню горизонта) при помощи держателей, фиг. 7. Наиболее рациональным является такое положение, когда таз располагается перпендикулярно уровню операционного стола (ось В, параллельная биспинальной оси перпендикулярна плоскости операционного стола, проходящей через оси XY), фиг. 9. Продольная ось тела С располагается параллельно фронтальной плоскости, проходящей через оси XZ, фиг. 7, 9. Здоровая нога сгибается в коленном и тазобедренном суставе, а оперируемая конечность располагается на подушке параллельно продольной оси тела С. Таким образом, тело пациента фиксируется определенным образом в так называемой опорной системе координат XYZ, относительно которой будут рассчитываться значения параметров при установке компонентов эндопротеза, фиг. 7.
Перед операцией производится инициализация датчиков, в ходе которой проводят настройку системы по пространственному положению (ориентации относительно горизонта, т.е. плоскости операционного стола XY), фиг. 7. Пространственное положение можно задать, пользуясь акселерометрами для определения направления вертикали (ось Z). Этими векторами определяются оси опорной системы координат. Этот процесс называется выставкой и, как правило, требует, чтобы объект оставался неподвижным в течение некоторого времени, необходимого для определения начального положения датчиков. Таким образом, оси датчиков XYZ после выставки должны соответствовать осям опорной системы координат XYZ, фиг. 7. Данные, получаемые с МЭМС-систем, передаются в персональный компьютер 7, отображаются на дисплее в необходимом для хирурга виде.
При положении больного на боку штатив 10 неподвижно фиксируется над пациентом на стойке (операционной лампе) таким образом, чтобы лучи лазера падали на пациента сверху. При этом используется маломощное лазерное излучение, аналогичное излучению лазерной указки. Конечность устанавливается в положении: отведения 0°, ротации 0° и разгибания 180° в тазобедренном суставе. Один из лучей лазера направляется на середину крыла подвздошной кости 30 или на переднюю верхнюю подвздошную ость. В точке падения луча делается отметка стерильным хирургическим маркером. Второй луч лазера направляется на наружную лодыжку 31. В точке падения луча делается аналогичная отметка. Таким образом, расстояние между двумя точками соответствует первоначальной длине конечности (до операции), измеренной между вышеуказанными ориентирами, фиг. 13.
Перед началом операции бесштифтовая референтная матрица 11 с фиксированным на ней датчиком пространственного положения 14 фиксируется на голени, фиг. 8. Для этого при предоперационном планировании на кожу голени при помощи маркера наносится анатомическая ось голени К, проходящая через середину «вилки голеностопного сустава» и через середину мыщелков голени. Фиксация осуществляется таким образом, чтобы верхний паз 12 и нижний паз 13 совпадали с осью К. Фиксация осуществляется неподвижно при помощи лейкопластырных повязок 23. Перед началом операции данные о положении в трехмерном пространстве датчика пространственного положения 14, фиксированного на бесштифтовой референтной матрице 11 передаются в персональный компьютер 7 и заносятся в память.
По ходу операции эндопротезирования тазобедренного сустава после осуществления доступа к большому вертелу бедренной кости 33 определяют исходный офсет (расстояние от центра головки бедренной кости до продольной оси бедренной кости). Для этого лазерные излучатели для определения офсета 15, расположенные строго вертикально над пациентом и фиксированные на штативе 17 направляют на наиболее выступающую точку большого вертела, таким образом, чтобы они падали в одну точку 32, фиг. 14. Штатив 17 может быть расположен на стойке или операционной лампе, фиг. 4. Лазерные излучатели для определения офсета 15 после их установки в соответствующее положение жестко в нем фиксируются. Таким образом, осуществляется косвенное определение исходного офсета, т.е. определение расстояния от лазерных излучателей для определения офсета 15 до большого вертела бедренной кости.
Далее производится удаление головки бедренной кости.
При обработке вертлужной впадины для установки вертлужного компонента на сферическую фрезу для обработки вертлужной впадины 24 устанавливается датчик пространственного положения 25, фиксированный на ней при помощи фиксатора для датчика пространственного положения 20 таким образом, чтобы угол между осью фиксатора для датчика пространственного положения 20 и осью сферической фрезы для обработки вертлужной впадины 24 составлял 45 градусов, фиг. 9. Далее при обработке вертлужной впадины фрезой сферической для обработки вертлужной впадины 24 ее ориентируют в пространстве при помощи данных о положении, передаваемых в персональный компьютер 7 с датчика пространственного положения 25. Наиболее рациональным считается положение вертлужного компонента: 45 градусов инклинации, т.е. угол между осями А и В и 15 градусов антеверсии, т.е. угол между осью С (продольная ось тела) и осью D. Соответственно ориентируется сферическая фреза для обработки вертлужной впадины 24. Данные об углах антеверсии и инклинации отображаются на экране персонального компьютера 7. После обработки вертлужной впадины переходят к установке вертлужного компонента эндопротеза (чашки), фиксированного на направителе для установки вертлужного компонента эндопротеза 4. Направитель для установки вертлужного компонента эндопротеза 4 ориентируют в трехмерном пространстве так же, как и фрезу сферическую для обработки вертлужной впадины 24. Для этого датчик пространственного положения 1, фиксированный на направителе для установки вертлужного компонента эндопротеза 4 при помощи фиксатора 2 устанавливают в гнездо направителя для фиксатора 3. После установки направителя для установки вертлужного компонента эндопротеза 1 в необходимое положение в трехмерном пространстве (данные об углах отображаются на дисплее персонального компьютера 7) производят установку вертлужного компонента эндопротеза. При необходимости положение сферической фрезы для обработки вертлужной впадины 24 и, соответственно, направителя для установки вертлужного компонента эндопротеза 4 можно изменить, например, при гиперлордозе поясничного отдела позвоночника вносится поправка: чашка устанавливается в положении меньшей антеверсии. При предоперационном планировании определяют необходимые величины углов наклона вертлужного компонента (чашки) в горизонтальной и фронтальной плоскостях, фиг. 9.
После установки вертлужного компонента переходят установке бедренного компонента эндопротеза. Для того чтобы хорошо визуализировать межверельную область и подготовить костномозговой канал для имплантации ножки протеза, необходимо под большой вертел подвести широкий ретрактор, приподнять проксимальный отдел бедренной кости, а ноге придать положение приведения, наружной ротации и опустить ее вниз. При этом датчик пространственного положения 14, фиксированный на бесштифтовой референтной матрице 11 должен располагаться таким образом, чтобы его ось Z совпадала с вертикалью, т.е. голень находилась в вертикальном положении, фиг. 10, фиг. 11. Данные о положении датчика пространственного положения 14 передаются в персональный в компьютер 7 и заносятся в память. Губчатую костную ткань межвертельной зоны удаляют при помощи коробчатого остеотома. Разверткой для обработки костномозгового канала 21 с фиксированным на ней датчиком пространственного положения 18 производят вскрытие костномозгового канала. При этом ось развертки для обработки костномозгового канала 21 совпадает с осью бедренной кости L (в конечном положении, когда она полностью вставлена). Данные о положении развертки для обработки костномозгового канала 21 в трехмерном пространстве передаются в персональный компьютер 7. Далее начинают обработку костномозгового канала при помощи рашпилей, устанавливаемых на рукоятку для крепления рашпилей 26. При этом данные о положении датчика пространственного положения 27, фиксированного на рукоятке для крепления рашпилей 26 передаются в персональный компьютер 7 и отображаются на его дисплее. Таким образом, имеется возможность установки указанной рукоятки 26 для крепления рашпилей с фиксированным на ней рашпилем вдоль оси бедренной кости L, предотвращая, таким образом, варусное или вальгусное отклонение бедренного компонента эндопротеза (отклонение оси бедренного компонента эндопротеза от оси бедренной кости L). При необходимости возможно изменение положения бедренного компонента эндопротеза относительно оси бедренной кости L (если требуется при предоперационном планировании), фиг. 11.
Определение антеторсии бедренного компонента эндопротеза при его установке осуществляется относительно положения датчика пространственного положения 14, фиксированного на бесштифтовой референтной матрице 11, фиг. 12. Ось голени К располагается перпендикулярно транскондилярной оси Н, относительно которой определяется антеторсия шейки (угол между осью М и осью Е) бедренной кости. В случае изменения оси голени (определяется при предоперационном планировании) возможно перед операцией внести соответствующие поправки. При вертикальном положении голени, контролируемым датчиком пространственного положения 14, фиксированным на бесштифтовой референтной матрице 11, производится разработка костномозгового канала при помощи рашпилей, фиксируемых на рукоятке для крепления рашпилей 26 под необходимым углом антеторсии. Данные о необходимых углах и положении инструментов в пространстве отображаются на дисплее персонального компьютера 7. После обработки костномозгового канала производится установка бедренного компонента эндопротеза при помощи направителя для установки бедренного компонента эндопротеза 28 с датчиком пространственного положения 29, фиксированном на направителе для установки бедренного компонента эндопротеза 28. Ориентация в трехмерном пространстве указанного направителя для установки бедренного компонента эндопротеза 28 и, соответственно, бедренного компонента эндопротеза, аналогична ориентации предшествующей рукоятки для крепления рашпилей 26, фиг. 11, 12.
При установке вертлужного и бедренного компонентов бесцементной фиксации так называемой «press-fit» фиксации, когда производится забивание вышеуказанных компонентов возможно повреждение как тазовой, так и бедренной кости. В первом случае отмечается так называемое «проваливание в таз», во втором - переломы и трещины бедренной кости. Поскольку датчик пространственного положения 29, фиксированный на направителе для установки бедренного компонента эндопротеза 28 и датчик пространственного положения 1, фиксированный на направителе для установки вертлужного компонента эндопротеза 4, представляют собой МЭМС-систему, то при забивании соответствующих компонентов эндопротеза, данные об ускорении, а соответственно, и силе удара (по второму закону Ньютона), направленной вдоль оси соответствющего инструмента, передаются с датчика пространственного положения в персональный компьютер 7, обрабатываются и выводятся на его дисплей. Соответственно, имеется возможность определять силу удара в точных числовых значениях, что необходимо для предотвращения вышеуказанных осложнений при наличии у больного остеопороза или других факторов, нарушающих плотность и структуру кости.
Следующим этапом операции является установка пробной тест-головки и проверка длины конечности, офсета, амплитуды движений в тазобедренном суставе.
Определение длины конечности, фиг. 13. После вправления тест-головки конечность устанавливается в положение: отведения 0°, ротации 0° и разгибания 180° в тазобедренном суставе. В этом же положении конечности стерильной линейкой определяется величина смещения точки падения луча 31 относительно метки на лодыжке (нанесенной перед началом операции) вдоль оси конечности, которая является значением изменения длины конечности в результате операции. Далее, в зависимости от изменения длины конечности в ходе операции, производится ее регулирование путем подбора необходимых типоразмеров компонентов эндопротеза.
Определение офсета (расстояния между продольной осью бедренной кости OV и центром головки бедренной кости Q), фиг. 14, фиг. 15 производится следующим образом. В ходе операции после осуществления доступа к большому вертелу бедренной кости на точку 32 (на схеме точку F) направляют оба лазерных луча 16, таким образом, фиксируют первоначальный офсет, фиг. 4, 14, 15. После установки пробной тест-головки офсет изменяется, в результате чего изменяются и точки падения лазерных лучей, фиг. 15. Например, при увеличении офсета, т.е. смещении кортикального слоя большого вертела бедренной кости 33 в положение 35, лазерные лучи 16 падают в точки G и N, фиг. 15. Наиболее оптимальным является расположение падения лазерных лучей 16 под углом 45 градусов к плоскости большого вертела, т.е. углы GFL и NFL равны 45 градусов. Тогда образуются два равнобедренных прямоугольных треугольника GLF и NLF, в которых катеты GL, LN, LF равны между собой. Соответственно, LF, т.е. расстояние, на которое изменился офсет, равно половине расстояния GN, т.е. расстояния между точками падения, которое можно измерить при помощи стерильной линейки. В случае если, после установки пробной тест-головки, точки падения обоих лазерных лучей совпадают, можно говорить о восстановлении первоначального офсета.
Определение амплитуды движений в тазобедренном суставе. Для определения амплитуды движений в тазобедренном суставе производят сгибание, разгибание, отведение, ротацию в суставе. При этом данные о движениях вдоль соответствующих осей передаются с датчика пространственного положения 14, фиксированного на бесштифтовой референтной матрице 11, в персональный компьютер 7 и выводятся на его дисплей.
Техническим результатом настоящего изобретения является:
- исключение повреждений мягких тканей, сосудисто-нервных пучков, костей за счет того, что данная навигационная система является полностью неинвазивной,
- предотвращение повреждения вертлужной впадины и бедренной кости (интраоперационного перелома),
- сокращение продолжительности операции.
Изобретение относится к медицинской технике и может быть использовано для ориентирования вертлужного и бедренного компонентов эндопротеза при их установке при операциях эндопротезирования тазобедренного сустава. Навигационная система содержит персональный компьютер, датчики пространственного положения, зафиксированные на направителе для установки вертлужного компонента эндопротеза, направителе для установки бедренного компонента эндопротеза, фрезе, развертке для обработки костно-мозгового канала, рукоятке для крепления рашпилей и бесштифтовой референтной матрице, выполненной с возможностью установки вдоль анатомической оси голени, каждый из которых включает МЭМС-систему, связанную беспроводным образом с разъемом персонального компьютера, источник питания, два лазерных излучателя для определения длины конечности, закрепленные на первом штативе посредством шарниров с возможностью изменения направления лазерных лучей в трехмерном пространстве и фиксации положения лазерных излучателей и два лазерных излучателя для определения расстояния между продольной осью бедренной кости и центром головки бедренной кости, закрепленные на втором штативе посредством шарниров и с возможностью изменения направления лазерных лучей в трехмерном пространстве и фиксации положения этих излучателей. Технический результат достигаемый при использовании изобретения заключается в исключении дополнительных повреждений тканей и сокращении продолжительности операции. 15 ил.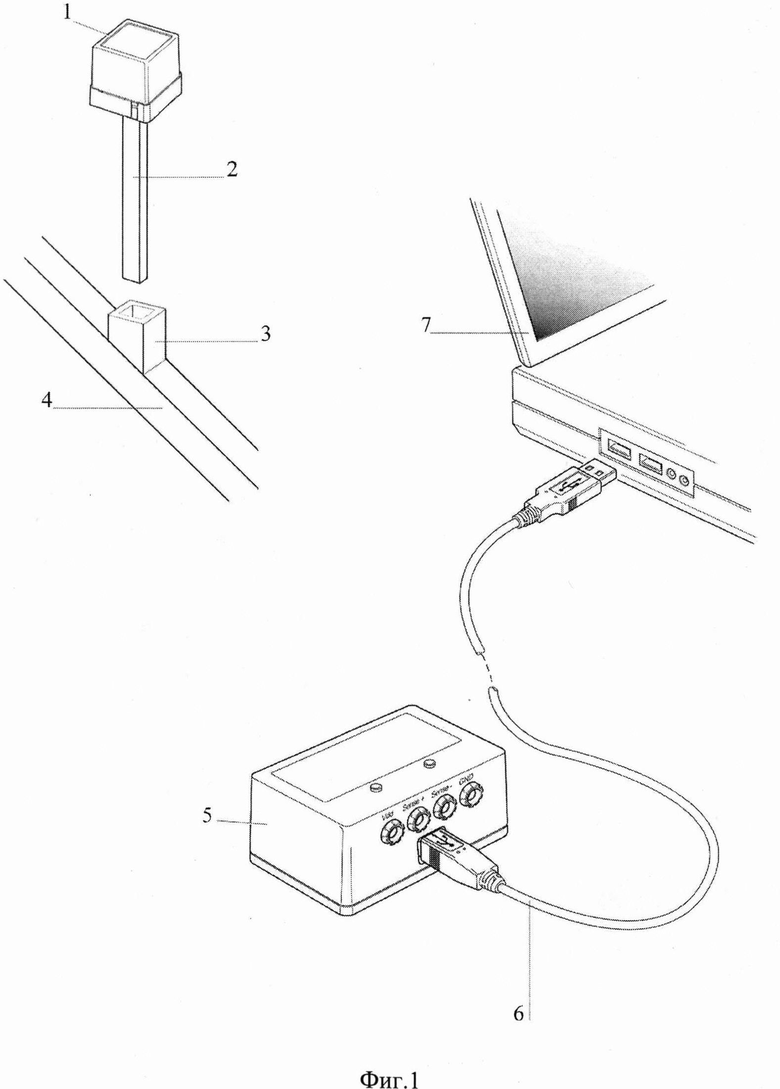
Навигационная система для эндопротезирования тазобедренного сустава, содержащая персональный компьютер, датчики пространственного положения, зафиксированные на направителе для установки вертлужного компонента эндопротеза, направителе для установки бедренного компонента эндопротеза, фрезе, развертке для обработки костно-мозгового канала, рукоятке для крепления рашпилей и бесштифтовой референтной матрице, выполненной с возможностью установки вдоль анатомической оси голени, каждый из которых включает МЭМС-систему, связанную беспроводным образом с разъемом персонального компьютера, источник питания, два лазерных излучателя для определения длины конечности, закрепленные на первом штативе посредством шарниров с возможностью изменения направления лазерных лучей в трехмерном пространстве и фиксации положения лазерных излучателей и два лазерных излучателя для определения расстояния между продольной осью бедренной кости и центром головки бедренной кости, закрепленные на втором штативе посредством шарниров и с возможностью изменения направления лазерных лучей в трехмерном пространстве и фиксации положения этих излучателей.
| US 2011213221 A1, 01.09.2011 | |||
| US 2012283599 A1, 08.11.2012 | |||
| US 2014330281 A1, 06.11.2014 | |||
| US 2012226283 A1, 06.09.2012 | |||
| Hartmuth Kiefer, OrthoPilot cup navigation - how to optimise cup positioning?, International Orthopaedics (SICOT) (2003) 27 (Suppl.1):S37-S42; | |||
| М.П | |||
| ЛИСИЦЫН и др | |||
| Компьютерная навигация при артроскопической пластике передней |

