Изобретение относится к робототехнике и может быть использовано при создании электроприводов манипуляторов.
Известно устройство для управления приводом робота, содержащее первый сумматор, последовательно соединенные первый блок умножения и второй сумматор, последовательно соединенные первый усилитель, электродвигатель, связанный с первым датчиком скорости непосредственно и через редуктор с первым датчиком положения, выход которого подключен к первому входу первого сумматора, второй вход которого образует вход устройства, последовательно соединенные третий сумматор, первый квадратор, второй блок умножения, второй вход которого соединен с выходом датчика массы захваченного груза, четвертый сумматор, второй и третий входы которого подключены соответственно к выходу первого задатчика постоянного сигнала и второго квадратора, последовательно соединенные второй задатчик постоянного сигнала, пятый сумматор, третий блок умножения, шестой сумматор и четвертый блок умножения, второй вход которого подключен к выходу второго датчика скорости, последовательно соединенные второй датчик положения и седьмой сумматор, последовательно соединенные третий датчик положения, первый функциональный преобразователь и третий квадратор, последовательно соединенные второй функциональный преобразователь, вход которого подключен к выходу третьего датчика положения и второму входу седьмого сумматора, и четвертый квадратор, последовательно соединенные третий функциональный преобразователь и пятый квадратор, последовательно соединенные четвертый функциональный преобразователь и шестой квадратор, причем выходы третьего, четвертого, пятого и шестого квадраторов подключены соответственно к четвертому, пятому, шестому и седьмому входам четвертого сумматора, входы третьего и четвертого функциональных преобразователей соединены с выходом седьмого сумматора, выходы второго и четвертого функциональных преобразователей подключены соответственно к первым и вторым входам третьего и восьмого сумматоров, а выход последнего подключен ко входу второго квадратора, последовательно соединенные третий задатчик постоянного сигнала, девятый сумматор, второй вход которого соединен с выходом датчика массы и вторым входом пятого сумматора, пятый блок умножения, десятый сумматор, второй вход которого подключен к выходу третьего блока умножения, шестой блок умножения, второй вход которого соединен с выходом третьего датчика скорости, и одиннадцатый сумматор, второй вход которого подключен к выходу четвертого блока умножения, последовательно соединенные второй усилитель, вход которого соединен с выходом седьмого сумматора, двенадцатый сумматор, второй вход которого подключен к выходу второго датчика положения, пятый функциональный преобразователь и седьмой блок умножения, выход которого подключен к третьему входу десятого сумматора, последовательно соединенные четвертый задатчик постоянного сигнала, тринадцатый сумматор, второй вход которого соединен с выходом датчика массы, восьмой блок умножения, второй вход которого подключен к выходу второго функционального преобразователя, и девятый блок умножения, второй вход которого соединен с выходом третьего функционального преобразователя, а выход - с вторым входом шестого сумматора, последовательно соединенные третий усилитель, вход которого подключен к выходу третьего датчика положения, и шестой функциональный преобразователь, выход которого соединен с вторым входом пятого блока умножения, причем второй вход третьего блока умножения через седьмой функциональный преобразователь подключен к выходу второго усилителя, а выход тринадцатого сумматора - к второму входу седьмого блока умножения, а также десятый и одиннадцатый блоки умножения, выходы которых подключены соответственно к второму и третьему входам второго сумматора, релейный элемент, выход которого подключен к четвертому входу второго сумматора, а вход - к выходу первого датчика скорости, первым входам десятого и одиннадцатого блоков умножения и пятому входу второго сумматора, причем второй вход десятого блока умножения подключен к выходу одиннадцатого сумматора, первый вход первого блока умножения соединен с выходом первого сумматора, а его второй вход - с вторым входом одиннадцатого блока умножения и выходом четвертого сумматора, при этом выход второго сумматора подключен к входу первого усилителя (Патент РФ № 2063866, МПК B25J13/00, 1996 г.).
Недостатком этого устройства является то, что оно предназначено для электропривода манипуляционного робота, имеющего меньше степеней подвижности. В результате это устройство не будет точно компенсировать все переменные нагрузочные характеристики рассматриваемого привода и обеспечивать требуемую динамическую точность его работы.
Известен также самонастраивающийся электропривод манипуляционного робота, содержащий последовательно соединенные первый сумматор, первый блок умножения, второй сумматор, первый усилитель и электродвигатель, связанный с первым датчиком скорости непосредственно и через редуктор с первым датчиком положения, выход которого подключен к первому входу первого сумматора, второй вход которого образует вход устройства, последовательно соединенные третий сумматор, первый квадратор, второй блок умножения, второй вход которого соединен с выходом датчика массы захваченного груза и четвертый сумматор, второй и третий входы которого подключены соответственно к выходу первого задатчика постоянного сигнала и второго квадратора, последовательно соединенные второй задатчик постоянного сигнала, пятый сумматор, третий блок умножения, шестой сумматор и четвертый блок умножения, второй вход которого подключен к выходу второго датчика скорости, последовательно соединенные второй датчик положения и седьмой сумматор последовательно соединенные третий датчик положения, первый функциональный преобразователь и третий квадратор, последовательно соединенные второй функциональный преобразователь, вход которого подключен к выходу третьего датчика положения и второму входу седьмого сумматора, и четвертый квадратор, последовательно соединенные третий функциональный преобразователь и пятый квадратор, последовательно соединенные четвертый функциональный преобразователь и шестой квадратор, причем выходы третьего, четвертого, пятого и шестого квадраторов подключены соответственно к четвертому, пятому, шестому и седьмому входам четвертого сумматора, входы третьего и четвертого функциональных преобразователей соединены с выходом седьмого сумматора, выходы второго и четвертого функциональных преобразователей подключены соответственно к первым и вторым входам третьего и восьмого сумматоров, а выход последнего подключен ко входу второго квадратора, последовательно соединенные третий задатчик постоянного сигнала, девятый сумматор, второй вход которого соединен с выходом датчика массы и вторым входом пятого сумматора, пятый блок умножения, десятый сумматор, второй вход которого подключен к выходу третьего блока умножения, шестой блок умножения, второй вход которого соединен с выходом третьего датчика скорости, и одиннадцатый сумматор, второй вход которого подключен к выходу четвертого блока умножения, последовательно соединенные второй усилитель, вход которого соединен с выходом седьмого сумматора, двенадцатый сумматор, второй вход которого подключен к выходу второго датчика положения, пятый функциональный преобразователь и седьмой блок умножения, выход которого подключен к третьему входу десятого сумматора, последовательно соединенные четвертый задатчик постоянного сигнала, тринадцатый сумматор, второй вход которого соединен с выходом датчика массы, восьмой блок умножения, второй вход которого подключен к выходу второго функционального преобразователя, и девятый блок умножения, второй вход которого соединен с выходом третьего функционального преобразователя, а выход - с вторым входом шестого сумматора, последовательно соединенные третий усилитель, вход которого подключен к выходу третьего датчика положения, и шестой функциональный преобразователь, выход которого соединен с вторым входом пятого блока умножения, причем второй вход третьего блока умножения через седьмой функциональный преобразователь подключен к выходу второго усилителя, а выход тринадцатого сумматора - к второму входу седьмого блока умножения, а также десятый и одиннадцатый блоки умножения, выходы которых подключены соответственно к второму и третьему входам второго сумматора, релейный элемент, выход которого подключен к четвертому входу второго сумматора, а вход - к выходу первого датчика скорости, первым входам десятого и одиннадцатого блоков умножения и пятому входу второго сумматора, причем второй вход десятого блока умножения подключен к выходу одиннадцатого сумматора, второй вход первого блока умножения соединен с вторым входом одиннадцатого блока умножения и выходом четвертого сумматора, отличающийся тем, что в него дополнительно введены последовательно соединенные восьмой функциональный преобразователь, двенадцатый блок умножения, второй вход которого подключен к выходу датчика ускорения, и тринадцатый блок умножения, второй вход которого через четырнадцатый сумматор подключен к выходу четырнадцатого блока умножения, первый и второй входы которого соответственно подключены к выходам четвертого функционального преобразователя и тринадцатого сумматора, а выход - к шестому входу второго сумматора, последовательно соединенные пятый задатчик сигнала, пятнадцатый сумматор, второй вход которого подключен к выходу датчика массы, и пятнадцатый блок умножения, второй вход которого подключен к выходу второго функционального преобразователя, а выход - ко второму входу четырнадцатого сумматора (Патент РФ № 2372638,МПК G05B13/02, 2009 г.).
Это устройство по своей технической сущности является наиболее близким к предлагаемому изобретению.
Недостатком этого устройства является то, что в электроприводе рассматриваемого манипулятора не учтена, считаясь малой, электрическая постоянная времени. В результате это устройство не будет точно компенсировать все его переменные нагрузочные характеристики и обеспечивать требуемую динамическую точность работы.
Задачей, на решение которой направлено заявляемое техническое решение, является обеспечение полной инвариантности динамических свойств рассматриваемого электропривода к непрерывным и быстрым изменениям его динамических моментных нагрузочных характеристик при движении манипулятора одновременно по всем его степеням подвижности.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в формировании дополнительного сигнала управления, подаваемого на вход электропривода, который обеспечивает получение необходимого моментного воздействия, точно компенсирующего вредные переменные моментные воздействия.
Поставленная задача решается тем, что в самонастраивающийся электропривод манипуляционного робота, содержащий последовательно соединенные первый сумматор, первый блок умножения, второй сумматор, первый усилитель и электродвигатель, связанный с первым датчиком скорости непосредственно и через редуктор с первым датчиком положения, выход которого подключен к первому входу первого сумматора, второй вход которого образует вход устройства, последовательно соединенные третий сумматор, первый квадратор, второй блок умножения, второй вход которого соединен с выходом датчика массы захваченного груза, и четвертый сумматор, второй и третий входы которого подключены соответственно к выходу первого задатчика сигнала и второго квадратора, последовательно соединенные второй задатчик сигнала, пятый сумматор, третий блок умножения, шестой сумматор и четвертый блок умножения, второй вход которого подключен к выходу второго датчика скорости, последовательно соединенные второй датчик положения и седьмой сумматор, последовательно соединенные третий датчик положения, первый синусный функциональный преобразователь и третий квадратор, последовательно соединенные второй косинусный функциональный преобразователь, вход которого подключен к выходу третьего датчика положения и второму входу седьмого сумматора, и четвертый квадратор, последовательно соединенные третий синусный функциональный преобразователь и пятый квадратор, последовательно соединенные четвертый косинусный функциональный преобразователь и шестой квадратор, причем выходы третьего, четвертого, пятого и шестого квадраторов подключены соответственно к четвертому, пятому, шестому и седьмому входам четвертого сумматора, входы третьего синусного и четвертого косинусного функциональных преобразователей соединены с выходом седьмого сумматора, выходы второго и четвертого косинусных функциональных преобразователей подключены соответственно к первым и вторым входам третьего и восьмого сумматоров, а выход последнего подключен ко входу второго квадратора, последовательно соединенные третий задатчик сигнала, девятый сумматор, второй вход которого соединен с выходом датчика массы и вторым входом пятого сумматора, пятый блок умножения, десятый сумматор, второй вход которого подключен к выходу третьего блока умножения, шестой блок умножения, второй вход которого соединен с выходом третьего датчика скорости, и одиннадцатый сумматор, второй вход которого подключен к выходу четвертого блока умножения, последовательно соединенные второй усилитель, вход которого соединен с выходом седьмого сумматора, двенадцатый сумматор, второй вход которого подключен к выходу второго датчика положения, пятый синусный функциональный преобразователь и седьмой блок умножения, выход которого подключен к третьему входу десятого сумматора, последовательно соединенные четвертый задатчик сигнала, тринадцатый сумматор, второй вход которого соединен с выходом датчика массы, восьмой блок умножения, второй вход которого подключен к выходу второго косинусного функционального преобразователя, и девятый блок умножения, второй вход которого соединен с выходом третьего синусного функционального преобразователя, а выход - с вторым входом шестого сумматора, последовательно соединенные третий усилитель, вход которого подключен к выходу третьего датчика положения, и шестой синусный функциональный преобразователь, выход которого соединен с вторым входом пятого блока умножения, причем второй вход третьего блока умножения через седьмой синусный функциональный преобразователь подключен к выходу второго усилителя, а выход тринадцатого сумматора - к второму входу седьмого блока умножения, а также десятый и одиннадцатый блоки умножения, выходы которых подключены соответственно к второму и третьему входам второго сумматора, релейный элемент, выход которого подключен к четвертому входу второго сумматора, а вход - к выходу первого датчика скорости, первым входам десятого и одиннадцатого блоков умножения и пятому входу второго сумматора, причем второй вход десятого блока умножения подключен к выходу одиннадцатого сумматора, второй вход первого блока умножения соединен с вторым входом одиннадцатого блока умножения и выходом четвертого сумматора, последовательно соединенные восьмой синусный функциональный преобразователь, двенадцатый блок умножения, второй вход которого подключен к выходу первого датчика ускорения, и тринадцатый блок умножения, второй вход которого через четырнадцатый сумматор подключен к выходу четырнадцатого блока умножения, первый и второй входы которого, соответственно, подключены к выходам четвертого косинусного функционального преобразователя и тринадцатого сумматора, а выход - к шестому входу второго сумматора, последовательно соединенные пятый задатчик сигнала, пятнадцатый сумматор, второй вход которого подключен к выходу датчика массы, и пятнадцатый блок умножения, второй вход которого подключен к выходу второго косинусного функционального преобразователя, а выход - ко второму входу четырнадцатого сумматора, дополнительно вводятся последовательно соединенные шестнадцатый блок умножения, первый вход которого подключен к выходу первого синусного функционального преобразователя, семнадцатый и восемнадцатый блоки умножения, шестнадцатый сумматор, девятнадцатый блок умножения, семнадцатый сумматор, второй вход которого подключен к выходу двадцатого блока умножения, первый и второй входы которого, соответственно, подключены к выходам шестого сумматора и второго датчика ускорения, двадцать первый блок умножения, второй вход которого подключен к выходу первого датчика 6 скорости, а выход - к седьмому входу второго сумматора, последовательно соединенные восемнадцатый сумматор, двадцать второй блок умножения, второй вход которого подключен к выходу восьмого блока умножения, двадцать третий блок умножения, второй вход которого подключен к выходу четвертого косинусного функционально преобразователя, последовательно соединенные девятый косинусный функциональный преобразователь, вход которого подключен к выходу двенадцатого сумматора, двадцать четвертый блок умножения, второй вход которого подключен к выходу тринадцатого сумматора, ко второму входу восемнадцатого блока умножения и к первому входу двадцать пятого блока умножения, второй вход которого подключен к выходу третьего синусного функционального преобразователя и второму входу семнадцатого блока умножения, двадцать шестой блок умножения, девятнадцатый сумматор, двадцать седьмой блок умножения, выход которого подключен к третьему входу семнадцатого сумматора, четвертый вход которого подключен к выходу двадцать восьмого блока умножения, первый и второй входы которого, соответственно, подключены к выходам десятого сумматора и третьего датчика ускорения, последовательно соединенные десятый косинусный функциональный преобразователь, вход которого подключен к выходу второго усилителя, двадцать девятый блок умножения, второй вход которого подключен к выходу пятого сумматора, тридцатый блок умножения, выход которого подключен ко второму входу девятнадцатого сумматора и второму входу шестнадцатого сумматора, третий вход которого подключен к выходу двадцать третьего блока умножения, а его второй вход - к выходу восемнадцатого сумматора и к первому входу тридцать первого блока умножения, второй вход которого подключен к выходу двадцать пятого блока умножения, последовательно соединенные одиннадцатый косинусный функциональный преобразователь, вход которого подключен к выходу третьего усилителя, тридцать второй блок умножения, второй вход которого подключен к выходу девятого сумматора, и тридцать третий блок умножения, выход которого подключен к третьему входу девятнадцатого сумматора, второй вход - к выходу третьего датчика скорости, ко вторым входам шестнадцатого и двадцать седьмого блоков умножения, а также к первому входу восемнадцатого сумматора и к первому входу двадцатого сумматора, второй вход которого подключен к выходу второго датчика скорости и ко вторым входам девятнадцатого блока умножения и восемнадцатого сумматора, а выход - ко второму входу двадцать шестого блока умножения, последовательно соединенные тридцать четвертый блок умножения, первый и второй входы которого подключены, соответственно, к выходам шестнадцатого блока умножения и пятнадцатого сумматора, двадцать первый сумматор, второй вход которого подключен к выходу тридцать первого блока умножения, тридцать пятый блок умножения, второй вход которого подключен к выходу двенадцатого блока умножения, а выход - к восьмому входу второго сумматора, последовательно соединенные дифференциатор, тридцать шестой блок умножения, тридцать седьмой блок умножения, второй вход которого подключен к выходу восьмого синусного функционального преобразователя, а выход - к девятому входу второго сумматора, последовательно соединенные тридцать восьмой блок умножения, первый вход которого подключен к выходу первого датчика ускорения и ко входу дифференциатора, а второй - к выходу четырнадцатого сумматора и к второму входу тридцать шестого блока умножения, тридцать девятый блок умножения, второй вход которого через двенадцатый косинусный функциональный преобразователь подключен к выходу первого датчика положения и входу восьмого синусного функционального преобразователя, сороковой блок умножения, второй вход которого подключен к выходу четвертого датчика скорости, а выход - к десятому входу второго сумматора, последовательно соединенные четвертый датчик ускорения, установленный на выходном валу редуктора и подключенный выходом к одиннадцатому входу второго сумматора и к первому входу сорок первого блока умножения, второй вход которого подключен к выходу одиннадцатого сумматора, а выход - к двенадцатому входу второго сумматора.
Сопоставительный анализ заявляемого технического решения с его аналогами и прототипом свидетельствует о его соответствии критерию «Новизна».
Заявленная совокупность признаков, приведенная в отличительной части формулы изобретения, позволяет добиться повышения динамической точности управления рассматриваемым электроприводом манипуляционного робота в условиях существенного и быстрого изменения параметров нагрузки, обусловленного полным эффектом взаимовлияния между всеми степенями подвижности работающего манипулятора.
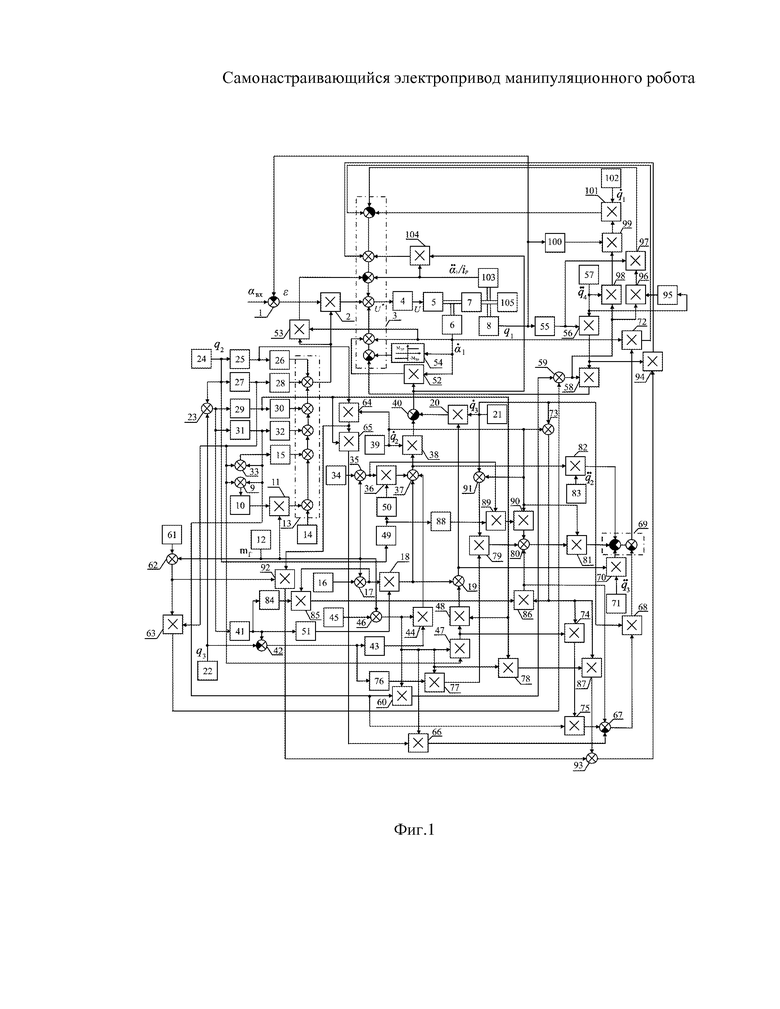
Блок-схема предлагаемого самонастраивающегося электропривода манипуляционного робота представлена на фиг.1. На фиг.2 представлена кинематическая схема манипулятора.
Самонастраивающийся электропривод манипуляционного робота, содержит последовательно соединенные первый сумматор 1, первый блок 2 умножения, второй сумматор 3, первый усилитель 4 и электродвигатель 5, связанный с первым датчиком скорости 6 непосредственно и через редуктор 7 с первым датчиком 8 положения, выход которого подключен к первому входу первого сумматора 1, второй вход которого образует вход устройства, последовательно соединенные третий сумматор 9, первый квадратор 10, второй блок 11 умножения, второй вход которого соединен с выходом датчика 12 массы захваченного груза, и четвертый сумматор 13, второй и третий входы которого подключены соответственно к выходу первого задатчика 14 сигнала и второго квадратора 15, последовательно соединенные второй задатчик 16 сигнала, пятый сумматор 17, третий блок 18 умножения, шестой сумматор 19 и четвертый блок 20 умножения, второй вход которого подключен к выходу второго датчика 21 скорости, последовательно соединенные второй датчик 22 положения и седьмой сумматор 23, последовательно соединенные третий датчик 24 положения, первый синусный функциональный преобразователь 25 и третий квадратор 26, последовательно соединенные второй косинусный функциональный преобразователь 27, вход которого подключен к выходу третьего датчика 24 положения и второму входу седьмого сумматора 23, и четвертый квадратор 28, последовательно соединенные третий синусный функциональный преобразователь 29 и пятый квадратор 30, последовательно соединенные четвертый косинусный функциональный преобразователь 31 и шестой квадратор 32, причем выходы третьего 26, четвертого 28, пятого 30 и шестого 32 квадраторов подключены соответственно к четвертому, пятому, шестому и седьмому входам четвертого сумматора 13, входы третьего синусного 29 и четвертого косинусного 31 функциональных преобразователей соединены с выходом седьмого сумматора 23, выходы второго 27 и четвертого 31 косинусных функциональных преобразователей подключены соответственно к первым и вторым входам третьего 9 и восьмого 33 сумматоров, а выход последнего подключен ко входу второго квадратора 15, последовательно соединенные третий задатчик 34 сигнала, девятый сумматор 35, второй вход которого соединен с выходом датчика 12 массы и вторым входом пятого сумматора 17, пятый блок 36 умножения, десятый сумматор 37, второй вход которого подключен к выходу третьего блока 18 умножения, шестой блок 38 умножения, второй вход которого соединен с выходом третьего датчика 39 скорости, и одиннадцатый сумматор 40, второй вход которого подключен к выходу четвертого блока 20 умножения, последовательно соединенные второй усилитель 41, вход которого соединен с выходом седьмого сумматора 23, двенадцатый сумматор 42, второй вход которого подключен к выходу второго датчика 22 положения, пятый синусный функциональный преобразователь 43 и седьмой блок 44 умножения, выход которого подключен к третьему входу десятого сумматора 37, последовательно соединенные четвертый задатчик 45 сигнала, тринадцатый сумматор 46, второй вход которого соединен с выходом датчика 12 массы, восьмой блок 47 умножения, второй вход которого подключен к выходу второго косинусного функционального преобразователя 27, и девятый блок 48 умножения, второй вход которого соединен с выходом третьего синусного функционального преобразователя 29, а выход - с вторым входом шестого сумматора 19, последовательно соединенные третий усилитель 49, вход которого подключен к выходу третьего датчика 24 положения, и шестой синусный функциональный преобразователь 50, выход которого соединен с вторым входом пятого блока 36 умножения, причем второй вход третьего блока 18 умножения через седьмой синусный функциональный преобразователь 51 подключен к выходу второго усилителя 41, а выход тринадцатого сумматора 46 - к второму входу седьмого блока 44 умножения, а также десятый 52 и одиннадцатый 53 блоки умножения, выходы которых подключены соответственно к второму и третьему входам второго сумматора 3, релейный элемент 54, выход которого подключен к четвертому входу второго сумматора 3, а вход - к выходу первого датчика 6 скорости, первым входам десятого 52 и одиннадцатого 53 блоков умножения и пятому входу второго сумматора 3, причем второй вход десятого блока 52 умножения подключен к выходу одиннадцатого сумматора 40, второй вход первого блока 2 умножения соединен с вторым входом одиннадцатого блока 53 умножения и выходом четвертого сумматора 13, последовательно соединенные восьмой синусный функциональный преобразователь 55, двенадцатый блок 56 умножения, второй вход которого подключен к выходу первого датчика 57 ускорения, и тринадцатый блок 58 умножения, второй вход которого через четырнадцатый сумматор 59 подключен к выходу четырнадцатого блока 60 умножения, первый и второй входы которого, соответственно, подключены к выходам четвертого косинусного функционального преобразователя 31 и тринадцатого сумматора 46, а выход - к шестому входу второго сумматора 3, последовательно соединенные пятый задатчик 61 сигнала, пятнадцатый сумматор 62, второй вход которого подключен к выходу датчика 12 массы, и пятнадцатый блок 63 умножения, второй вход которого подключен к выходу второго косинусного функционального преобразователя 27, а выход - ко второму входу четырнадцатого сумматора 59, последовательно соединенные шестнадцатый блок 64 умножения, первый вход которого подключен к выходу первого синусного функционального преобразователя 25, семнадцатый 65 и восемнадцатый 66 блоки умножения, шестнадцатый сумматор 67, девятнадцатый блок 68 умножения, семнадцатый сумматор 69, второй вход которого подключен к выходу двадцатого блока 70 умножения, первый и второй входы которого, соответственно, подключены к выходам шестого сумматора 19 и второго датчика 71 ускорения, двадцать первый блок 72 умножения, второй вход которого подключен к выходу первого датчика 6 скорости, а выход - к седьмому входу второго сумматора 3, последовательно соединенные восемнадцатый сумматор 73, двадцать второй блок 74 умножения, второй вход которого подключен к выходу восьмого блока 47 умножения, двадцать третий блок 75 умножения, второй вход которого подключен к выходу четвертого косинусного функционально преобразователя 31, последовательно соединенные девятый косинусный функциональный преобразователь 76, вход которого подключен к выходу двенадцатого сумматора 42, двадцать четвертый блок 77 умножения, второй вход которого подключен к выходу тринадцатого сумматора 46, ко второму входу восемнадцатого блока 66 умножения и к первому входу двадцать пятого блока 78 умножения, второй вход которого подключен к выходу третьего синусного функционального преобразователя 29 и второму входу семнадцатого блока 65 умножения, двадцать шестой блок 79 умножения, девятнадцатый сумматор 80, двадцать седьмой блок 81 умножения, выход которого подключен к третьему входу семнадцатого сумматора 69, четвертый вход которого подключен к выходу двадцать восьмого блока 82 умножения, первый и второй входы которого, соответственно, подключены к выходам десятого сумматора 37 и третьего датчика 83 ускорения, последовательно соединенные десятый косинусный функциональный преобразователь 84, вход которого подключен к выходу второго усилителя 41, двадцать девятый блок 85 умножения, второй вход которого подключен к выходу пятого сумматора 17, тридцатый блок 86 умножения, выход которого подключен ко второму входу девятнадцатого сумматора 80 и второму входу шестнадцатого сумматора 67, третий вход которого подключен к выходу двадцать третьего блока 75 умножения, а его второй вход - к выходу восемнадцатого сумматора 73 и к первому входу тридцать первого блока 87 умножения, второй вход которого подключен к выходу двадцать пятого блока 78 умножения, последовательно соединенные одиннадцатый косинусный функциональный преобразователь 88, вход которого подключен к выходу третьего усилителя 49, тридцать второй блок 89 умножения, второй вход которого подключен к выходу девятого сумматора 35, и тридцать третий блок 90 умножения, выход которого подключен к третьему входу девятнадцатого сумматора 80, второй вход - к выходу третьего датчика 39 скорости, ко вторым входам шестнадцатого 64 и двадцать седьмого 81 блоков умножения, а также к первому входу восемнадцатого 73 сумматора и к первому входу двадцатого 91 сумматора, второй вход которого подключен к выходу второго датчика 21 скорости и ко вторым входам девятнадцатого блока 68 умножения и восемнадцатого 73 сумматора, а выход - ко второму входу двадцать шестого блока 79 умножения, последовательно соединенные тридцать четвертый блок 92 умножения, первый и второй входы которого подключены, соответственно, к выходам шестнадцатого блока 64 умножения и пятнадцатого сумматора 62, двадцать первый сумматор 93, второй вход которого подключен к выходу тридцать первого блока 87 умножения, тридцать пятый блок 94 умножения, второй вход которого подключен к выходу двенадцатого блока 56 умножения, а выход - к восьмому входу второго сумматора 3, последовательно соединенные дифференциатор 95, тридцать шестой блок 96 умножения, тридцать седьмой блок 97 умножения, второй вход которого подключен к выходу восьмого синусного функционального преобразователя 55, а выход - к девятому входу второго сумматора 3, последовательно соединенные тридцать восьмой блок 98 умножения, первый вход которого подключен к выходу первого датчика ускорения 57 и ко входу дифференциатора 95, а второй - к выходу четырнадцатого сумматора 59 и к второму входу тридцать шестого блока 96 умножения, тридцать девятый блок 99 умножения, второй вход которого через двенадцатый косинусный функциональный преобразователь 100 подключен к выходу первого датчика 8 положения и входу восьмого синусного функционального преобразователя 55, сороковой блок 101 умножения, второй вход которого подключен к выходу четвертого датчика 102 скорости, а выход - к десятому входу второго сумматора 3, последовательно соединенные четвертый датчик 103 ускорения, установленный на выходном валу редуктора 7 и подключенный выходом к одиннадцатому входу второго сумматора 3 и к первому входу сорок первого блока 104 умножения, второй вход которого подключен к выходу одиннадцатого сумматора 40, а выход - к двенадцатому входу второго сумматора 3, объект управления 105.
На указанных фигурах введены следующие обозначения:

















 ,
,  ,
,  - ускорения соответствующих степеней подвижности манипулятора.
- ускорения соответствующих степеней подвижности манипулятора.
Кроме того, полагается, что 



Рассматриваемый электропривод при работе с различными грузами, а также за счет взаимовлияния между всеми степенями подвижности манипулятора обладает переменными моментными нагрузочными характеристиками, которые могут меняться в широких пределах. Это снижает динамическую точность работы электропривода и даже приводит к потере его устойчивости. В результате для повышения динамической точности и устойчивости работы этого электропривода возникает задача, связанная с обеспечением инвариантности его динамических свойств к изменениям моментных нагрузочных характеристик.
Устройство работает следующим образом. На вход подается воздействие 


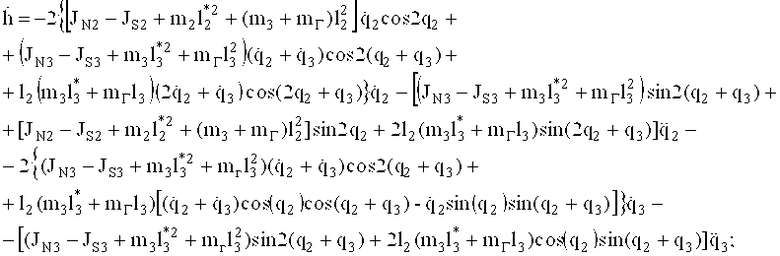
С помощью уравнения Лагранжа 2-го рода можно записать, что моментное воздействие на выходной вал привода, управляющего координатой 
 (1)
(1)
С учетом соотношения (1), а также уравнений электрической  и механической
и механической 
 цепей электродвигателя постоянного тока с постоянными магнитами или независимого возбуждения рассматриваемый электропривод, управляющий координатой
цепей электродвигателя постоянного тока с постоянными магнитами или независимого возбуждения рассматриваемый электропривод, управляющий координатой 
 (2)
(2)
где R, L - соответственно, активное сопротивление и индуктивность якорной цепи электродвигателя 5; J - моменты инерции якоря электродвигателя 5 и вращающихся частей редуктора 7, приведенные к валу электродвигателя; 













 -
-  .
.
Третий 24 и второй 22 датчики положения соответственно измеряют обобщенные координаты 





Первый (со стороны второго косинусного функционального преобразователя 27) и второй положительные входы восьмого сумматора 33 соответственно имеют коэффициенты усиления



На выходе первого задатчика 14 сигнала формируется сигнал 






Датчики скорости четвертый 102, третий 39 и второй 21 измеряют соответственно 


На выходе третьего задатчика 34 сигнала формируется сигнал 


Второй задатчик 16 сигнала формирует сигнал 


Четвертый задатчик 45 сигнала формирует сигнал 


Три положительных входа десятого сумматора 37 имеют единичные коэффициенты усиления. Поэтому на выходе шестого блока 38 умножения формируется сигнал

На выходе восьмого блока 47 умножения формируется сигнал 

Оба отрицательных входа одиннадцатого сумматора 40 имеют единичные коэффициенты усиления, поэтому на его выходе формируется сигнал 
Первый датчик 57 ускорения измеряет  . В результате на выходе двенадцатого блока 56 умножения формируется сигнал
. В результате на выходе двенадцатого блока 56 умножения формируется сигнал 




Второй (со стороны пятнадцатого блока 63 умножения) и первый положительные входы четырнадцатого сумматора 59 имеют, соответственно, единичный коэффициент усиления и коэффициент усиления, равный 

Второй (со стороны второго датчика 21 скорости) и первый положительные входы двадцатого сумматора 91 имеют, соответственно, единичный коэффициент усиления и коэффициент усиления, равный 2. В результате на выходе двадцать шестого блока 79 умножения формируется сигнал  . Восемнадцатый сумматор 73 имеет положительные входы с единичными коэффициентами усиления. Первый (со стороны двадцать шестого блока 79 умножения) и третий (со стороны тридцать третьего блока 90 умножения) положительные входы девятнадцатого сумматора 80 имеют единичные коэффициенты усиления, а его второй положительный - коэффициент усиления, равный 2. В результате на выходе двадцать седьмого блока 81 умножения формируется сигнал
. Восемнадцатый сумматор 73 имеет положительные входы с единичными коэффициентами усиления. Первый (со стороны двадцать шестого блока 79 умножения) и третий (со стороны тридцать третьего блока 90 умножения) положительные входы девятнадцатого сумматора 80 имеют единичные коэффициенты усиления, а его второй положительный - коэффициент усиления, равный 2. В результате на выходе двадцать седьмого блока 81 умножения формируется сигнал 

Третий (со стороны двадцать третьего блока 75 умножения) и второй (со стороны тридцатого блока 86 умножения) положительные входы сумматора 67 имеют, соответственно, единичный коэффициент усиления и коэффициент усиления, равный 2, а его первый отрицательный вход - единичный коэффициент усиления. В результате на выходе девятнадцатого блока 68 умножения формируется сигнал

На выходе второго датчика 71 ускорения формируется сигнал 

 .
.
На выходе третьего датчика 83 ускорения формируется сигнал 

 .
.
Все отрицательные входы семнадцатого сумматора 69 имеют единичные коэффициенты усиления. В результате на его выходе формируется сигнал  .
.
Первый (со стороны тридцать четвертого блока 92 умножения) и второй положительные входы двадцать первого сумматора 93 имеют, соответственно, единичный коэффициент усиления и коэффициент усиления, равный 
 , на выходе блока 97 умножения - сигнал
, на выходе блока 97 умножения - сигнал
 ,
,
а на выходе сорокового блока 101 умножения - сигнал
 .
.
При этом сигналы на выходах блоков умножения тридцать пятого 94, тридцать седьмого 97 и сорокового 101 являются слагаемыми выражения  .
.
На первый положительный вход второго сумматора 3 (со стороны первого блока 2 умножения) с коэффициентом усиления 


 на четвертый положительный вход (со стороны релейного элемента 54) с коэффициентом усиления
на четвертый положительный вход (со стороны релейного элемента 54) с коэффициентом усиления 
 , а на его шестой отрицательный вход (со стороны тринадцатого блока 58 умножения) с коэффициентом усиления
, а на его шестой отрицательный вход (со стороны тринадцатого блока 58 умножения) с коэффициентом усиления 


На выходе четвертого датчика 103 ускорения формируется сигнал 



 (3)
(3)
Поскольку при движении электропривода 



обеспечивающими рассматриваемому электроприводу заданные динамические свойства и качественные показатели работы за счет выбора желаемых постоянных значений 

| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2017 |
|
RU2688449C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2705734C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2014 |
|
RU2562403C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2017 |
|
RU2688448C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2007 |
|
RU2355563C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2705739C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2006 |
|
RU2335389C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2014 |
|
RU2577204C2 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2012 |
|
RU2489251C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2014 |
|
RU2551044C1 |

Изобретение относится к самонастраивающейся системе управления электроприводом. Самонастраивающийся электропривод манипуляционного робота содержит электродвигатель, редуктор, датчики положения и скорости, сумматоры, блоки умножения, задатчики сигнала, квадраторы, дифференциатор и функциональные преобразователи: синусные и косинусные. В изобретении дополнительные блоки, а также соответствующие связи обеспечивают полное постоянство динамических свойств рассматриваемого электропривода ко всем приложенным к нему моментным воздействиям. Технический результат заключается в точной компенсации вредных переменных моментных воздействий на электропривод манипулятора. 2 ил.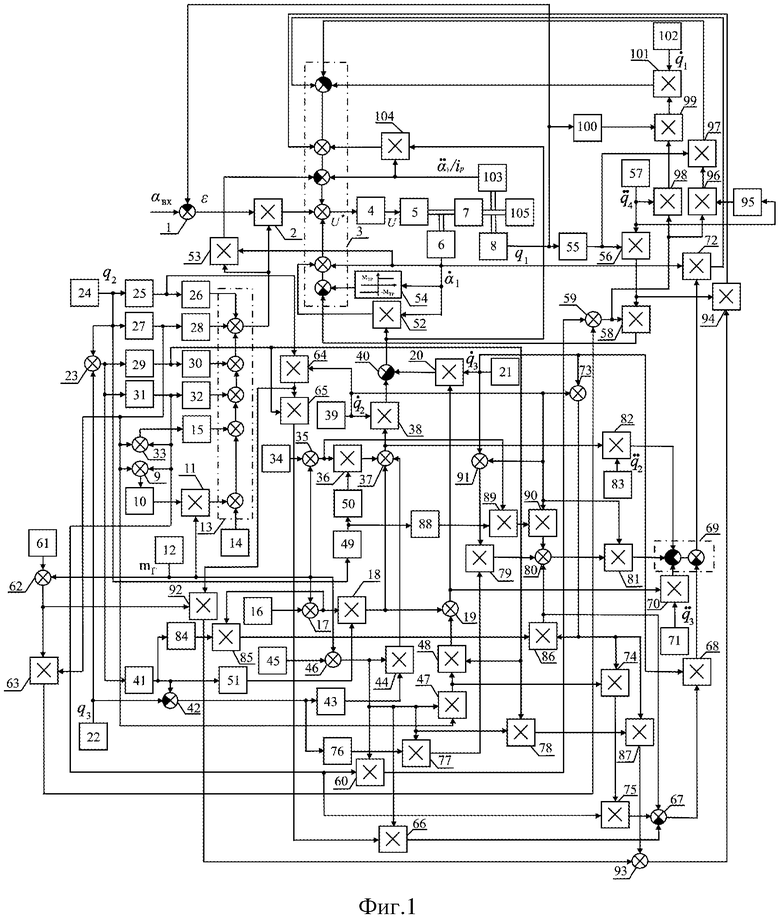
Самонастраивающийся электропривод манипуляционного робота, содержащий последовательно соединенные первый сумматор, первый блок умножения, второй сумматор, первый усилитель и электродвигатель, связанный с первым датчиком скорости непосредственно и через редуктор с первым датчиком положения, выход которого подключен к первому входу первого сумматора, второй вход которого образует вход устройства, последовательно соединенные третий сумматор, первый квадратор, второй блок умножения, второй вход которого соединен с выходом датчика массы захваченного груза, и четвертый сумматор, второй и третий входы которого подключены соответственно к выходу первого задатчика сигнала и второго квадратора, последовательно соединенные второй задатчик сигнала, пятый сумматор, третий блок умножения, шестой сумматор и четвертый блок умножения, второй вход которого подключен к выходу второго датчика скорости, последовательно соединенные второй датчик положения и седьмой сумматор, последовательно соединенные третий датчик положения, первый синусный функциональный преобразователь и третий квадратор, последовательно соединенные второй косинусный функциональный преобразователь, вход которого подключен к выходу третьего датчика положения и второму входу седьмого сумматора, и четвертый квадратор, последовательно соединенные третий синусный функциональный преобразователь и пятый квадратор, последовательно соединенные четвертый косинусный функциональный преобразователь и шестой квадратор, причем выходы третьего, четвертого, пятого и шестого квадраторов подключены соответственно к четвертому, пятому, шестому и седьмому входам четвертого сумматора, входы третьего синусного и четвертого косинусного функциональных преобразователей соединены с выходом седьмого сумматора, выходы второго и четвертого косинусных функциональных преобразователей подключены соответственно к первым и вторым входам третьего и восьмого сумматоров, а выход последнего подключен ко входу второго квадратора, последовательно соединенные третий задатчик сигнала, девятый сумматор, второй вход которого соединен с выходом датчика массы и вторым входом пятого сумматора, пятый блок умножения, десятый сумматор, второй вход которого подключен к выходу третьего блока умножения, шестой блок умножения, второй вход которого соединен с выходом третьего датчика скорости, и одиннадцатый сумматор, второй вход которого подключен к выходу четвертого блока умножения, последовательно соединенные второй усилитель, вход которого соединен с выходом седьмого сумматора, двенадцатый сумматор, второй вход которого подключен к выходу второго датчика положения, пятый синусный функциональный преобразователь и седьмой блок умножения, выход которого подключен к третьему входу десятого сумматора, последовательно соединенные четвертый задатчик сигнала, тринадцатый сумматор, второй вход которого соединен с выходом датчика массы, восьмой блок умножения, второй вход которого подключен к выходу второго косинусного функционального преобразователя, и девятый блок умножения, второй вход которого соединен с выходом третьего синусного функционального преобразователя, а выход - с вторым входом шестого сумматора, последовательно соединенные третий усилитель, вход которого подключен к выходу третьего датчика положения, и шестой синусный функциональный преобразователь, выход которого соединен с вторым входом пятого блока умножения, причем второй вход третьего блока умножения через седьмой синусный функциональный преобразователь подключен к выходу второго усилителя, а выход тринадцатого сумматора - к второму входу седьмого блока умножения, а также десятый и одиннадцатый блоки умножения, выходы которых подключены соответственно к второму и третьему входам второго сумматора, релейный элемент, выход которого подключен к четвертому входу второго сумматора, а вход - к выходу первого датчика скорости, первым входам десятого и одиннадцатого блоков умножения и пятому входу второго сумматора, причем второй вход десятого блока умножения подключен к выходу одиннадцатого сумматора, второй вход первого блока умножения соединен с вторым входом одиннадцатого блока умножения и выходом четвертого сумматора, последовательно соединенные восьмой синусный функциональный преобразователь, двенадцатый блок умножения, второй вход которого подключен к выходу первого датчика ускорения, и тринадцатый блок умножения, второй вход которого через четырнадцатый сумматор подключен к выходу четырнадцатого блока умножения, первый и второй входы которого, соответственно, подключены к выходам четвертого косинусного функционального преобразователя и тринадцатого сумматора, а выход - к шестому входу второго сумматора, последовательно соединенные пятый задатчик сигнала, пятнадцатый сумматор, второй вход которого подключен к выходу датчика массы, и пятнадцатый блок умножения, второй вход которого подключен к выходу второго косинусного функционального преобразователя, а выход - ко второму входу четырнадцатого сумматора, отличающийся тем, что дополнительно вводятся последовательно соединенные шестнадцатый блок умножения, первый вход которого подключен к выходу первого синусного функционального преобразователя, семнадцатый и восемнадцатый блоки умножения, шестнадцатый сумматор, девятнадцатый блок умножения, семнадцатый сумматор, второй вход которого подключен к выходу двадцатого блока умножения, первый и второй входы которого, соответственно, подключены к выходам шестого сумматора и второго датчика ускорения, двадцать первый блок умножения, второй вход которого подключен к выходу первого датчика 6 скорости, а выход - к седьмому входу второго сумматора, последовательно соединенные восемнадцатый сумматор, двадцать второй блок умножения, второй вход которого подключен к выходу восьмого блока умножения, двадцать третий блок умножения, второй вход которого подключен к выходу четвертого косинусного функционально преобразователя, последовательно соединенные девятый косинусный функциональный преобразователь, вход которого подключен к выходу двенадцатого сумматора, двадцать четвертый блок умножения, второй вход которого подключен к выходу тринадцатого сумматора, ко второму входу восемнадцатого блока умножения и к первому входу двадцать пятого блока умножения, второй вход которого подключен к выходу третьего синусного функционального преобразователя и второму входу семнадцатого блока умножения, двадцать шестой блок умножения, девятнадцатый сумматор, двадцать седьмой блок умножения, выход которого подключен к третьему входу семнадцатого сумматора, четвертый вход которого подключен к выходу двадцать восьмого блока умножения, первый и второй входы которого, соответственно, подключены к выходам десятого сумматора и третьего датчика ускорения, последовательно соединенные десятый косинусный функциональный преобразователь, вход которого подключен к выходу второго усилителя, двадцать девятый блок умножения, второй вход которого подключен к выходу пятого сумматора, тридцатый блок умножения, выход которого подключен ко второму входу девятнадцатого сумматора и второму входу шестнадцатого сумматора, третий вход которого подключен к выходу двадцать третьего блока умножения, а его второй вход - к выходу восемнадцатого сумматора и к первому входу тридцать первого блока умножения, второй вход которого подключен к выходу двадцать пятого блока умножения, последовательно соединенные одиннадцатый косинусный функциональный преобразователь, вход которого подключен к выходу третьего усилителя, тридцать второй блок умножения, второй вход которого подключен к выходу девятого сумматора, и тридцать третий блок умножения, выход которого подключен к третьему входу девятнадцатого сумматора, второй вход - к выходу третьего датчика скорости, ко вторым входам шестнадцатого и двадцать седьмого блоков умножения, а также к первому входу восемнадцатого сумматора и к первому входу двадцатого сумматора, второй вход которого подключен к выходу второго датчика скорости и ко вторым входам девятнадцатого блока умножения и восемнадцатого сумматора, а выход - ко второму входу двадцать шестого блока умножения, последовательно соединенные тридцать четвертый блок умножения, первый и второй входы которого подключены, соответственно, к выходам шестнадцатого блока умножения и пятнадцатого сумматора, двадцать первый сумматор, второй вход которого подключен к выходу тридцать первого блока умножения, тридцать пятый блок умножения, второй вход которого подключен к выходу двенадцатого блока 56 умножения, а выход - к восьмому входу второго сумматора, последовательно соединенные дифференциатор, тридцать шестой блок умножения, тридцать седьмой блок умножения, второй вход которого подключен к выходу восьмого синусного функционального преобразователя, а выход - к девятому входу второго сумматора, последовательно соединенные тридцать восьмой блок умножения, первый вход которого подключен к выходу первого датчика ускорения и ко входу дифференциатора, а второй - к выходу четырнадцатого сумматора и к второму входу тридцать шестого блока умножения, тридцать девятый блок умножения, второй вход которого через двенадцатый косинусный функциональный преобразователь подключен к выходу первого датчика положения и входу восьмого синусного функционального преобразователя, сороковой блок умножения, второй вход которого подключен к выходу четвертого датчика скорости, а выход - к десятому входу второго сумматора, последовательно соединенные четвертый датчик ускорения, установленный на выходном валу редуктора и подключенный выходом к одиннадцатому входу второго сумматора и к первому входу сорок первого блока умножения, второй вход которого подключен к выходу одиннадцатого сумматора, а выход - к двенадцатому входу второго сумматора.
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2008 |
|
RU2372638C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2007 |
|
RU2355563C2 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2012 |
|
RU2487008C1 |
| US 8428779 B2, 23.04.2013. | |||

