Изобретение относится к робототехнике и может быть использовано при создании электроприводов манипуляторов.
Известен самонастраивающийся электропривод манипуляционного робота, содержащий последовательно соединенные первый сумматор, второй сумматор, первый блок умножения, третий сумматор, первый усилитель и электродвигатель, связанный непосредственно с первым датчиком скорости и через редуктор - с первым датчиком положения, выход которого подключен к первому входу первого сумматора, соединенного вторым входом со входом устройства, последовательно подключенные второй датчик скорости, второй блок умножения, третий блок умножения и четвертый сумматор, второй вход которого соединен со вторым входом второго сумматора и выходом первого датчика скорости, третий вход - с выходом релейного элемента, подключенного входом ко второму входу третьего блока умножения и выходу первого датчика скорости, а выход соединен со вторым входом третьего сумматора, последовательно соединенные датчик массы и пятый сумматор, второй вход которого подключен к выходу первого задатчика постоянного сигнала, а выход - к второму входу первого блока умножения, последовательно соединенные второй датчик положения, первый функциональный преобразователь, четвертый блок умножения, шестой сумматор, второй вход которого подключен к выходу второго задатчика постоянного сигнала, и пятый блок умножения, второй вход которого соединен с выходом первого датчика ускорения, а выход - с четвертым входом четвертого сумматора, последовательно соединенные третий задатчик постоянного сигнала, седьмой сумматор, второй вход которого подключен к выходу датчика массы, и шестой блок умножения, второй вход которого через второй функциональный преобразователь подключен к выходу второго датчика положения, а выход - к второму входу второго блока умножения, причем второй вход четвертого блока умножения соединен с выходом седьмого сумматора, его выход - с третьим входом пятого сумматора, третий вход шестого сумматора соединен с выходом датчика массы, пятый вход четвертого сумматора через седьмой блок умножения, второй вход которого соединен с выходом второго блока умножения, подключен к выходу второго датчика скорости, последовательно соединенные четвертый задатчик постоянного сигнала, восьмой сумматор, второй вход которого подключен к выходу датчика массы и восьмой блок умножения, второй вход которого через третий функциональный преобразователь соединен с выходом первого датчика положения, а его выход - с шестым входом четвертого сумматора, последовательно соединенные девятый сумматор, первый и второй входы которого подключены соответственно к выходам первого и второго датчиков положения, четвертый функциональный преобразователь и девятый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а выход - к седьмому входу четвертого сумматора, последовательно соединенные второй усилитель, пятый функциональный преобразователь, десятый блок умножения, десятый сумматор и одиннадцатый блок умножения, второй вход которого через квадратор подключен к выходу третьего датчика скорости, а выход - к восьмому входу четвертого сумматора, последовательно соединенные пятый задатчик постоянного сигнала, одиннадцатый сумматор и двенадцатый блок умножения, второй вход которого через последовательно соединенные третий усилитель и шестой функциональный преобразователь подключен к выходу девятого сумматора, а его выход - ко второму входу десятого сумматора, последовательно соединенные двенадцатый сумматор, первый и второй входы которого подключены соответственно к выходам второго датчика положения и второго усилителя, седьмой функциональный преобразователь и тринадцатый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а его выход - к третьему входу десятого сумматора, последовательно соединенные шестой задатчик постоянного сигнала и тринадцатый сумматор, второй вход которого подключен ко второму входу одиннадцатого сумматора и выходу датчика массы, а выход - ко второму входу десятого блока умножения, причем вход второго усилителя соединен с выходом первого датчика положения, последовательно соединенные третий датчик положения, восьмой функциональный преобразователь и четырнадцатый блок умножения, второй вход которого подключен к выходу второго датчика ускорения, а также пятнадцатый блок умножения, выход которого подключен к девятому входу четвертого сумматора, последовательно соединенные девятый функциональный преобразователь, вход которого подключен к выходу первого датчика положения, шестнадцатый блок умножения, второй вход которого подключен к выходу восьмого сумматора, и четырнадцатый сумматор, выход которого подключен ко второму входу пятнадцатого блока умножения, последовательно соединенные десятый функциональный преобразователь, вход которого подключен к выходу девятого сумматора, и семнадцатый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а выход - ко второму входу четырнадцатого сумматора, последовательно соединенные одиннадцатый функциональный преобразователь, вход которого подключен к выходу третьего датчика положения, восемнадцатый блок умножения, второй вход которого подключен к выходу третьего датчика ускорения, и пятнадцатый сумматор, второй вход которого подключен к выходу четырнадцатого блока умножения, а выход - к первому входу пятнадцатого блока умножения (патент РФ №2453893. Бюл. №17, 2012).
Недостатком данного устройства является то, что оно не учитывает электрическую постоянную времени электродвигателя. В результате это устройство не будет точно компенсировать все переменные нагрузочные характеристики рассматриваемого электропривода и обеспечивать требуемую динамическую точность его работы.
Известен также самонастраивающийся электропривод манипулятора, содержащий последовательно соединенные первый сумматор, второй сумматор, первый блок умножения, третий сумматор, первый усилитель и электродвигатель, связанный непосредственно с первым датчиком скорости и через редуктор с первым датчиком положения, выход которого подключен к первому входу первого сумматора, соединенного вторым входом с входом устройства, последовательно соединенные второй датчик скорости, второй блок умножения, третий блок умножения и четвертый сумматор, второй вход которого соединен со вторым входом второго сумматора и выходом первого датчика скорости, третий вход - с выходом релейного элемента, подключенного входом ко второму входу третьего блока умножения и выходу первого датчика скорости, а выход - ко второму входу третьего сумматора, последовательно соединенные датчик массы и пятый сумматор, второй вход которого подключен к выходу первого задатчика постоянного сигнала, а выход - ко второму входу первого блока умножения, последовательно соединенные второй датчик положения, первый косинусный функциональный преобразователь, четвертый блок умножения, шестой сумматор, второй вход которого подключен к выходу второго задатчика постоянного сигнала, и пятый блок умножения, второй вход которого подключен к выходу первого датчика ускорения, а выход - к четвертому входу четвертого сумматора, последовательно соединенные третий задатчик постоянного сигнала, седьмой сумматор, второй вход которого подключен к выходу датчика массы, и шестой блок умножения, второй вход которого через второй синусный функциональный преобразователь подключен к выходу второго датчика положения, а выход - ко второму входу второго блока умножения, причем второй вход четвертого блока умножения соединен с выходом седьмого сумматора, его выход - с третьим входом пятого сумматора, третий вход шестого сумматора соединен с выходом датчика массы, пятый вход четвертого сумматора через седьмой блок умножения, второй вход которого соединен с выходом второго блока умножения, подключен к выходу второго датчика скорости, последовательно соединенные четвертый задатчик постоянного сигнала, восьмой сумматор, второй вход которого подключен к выходу датчика массы, и восьмой блок умножения, второй вход которого через третий синусный функциональный преобразователь соединен с выходом первого датчика положения, а его выход - с шестым входом четвертого сумматора, последовательно соединенные девятый сумматор, первый и второй входы которого подключены соответственно к выходам первого и второго датчиков положения, четвертый синусный функциональный преобразователь и девятый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а выход - к седьмому входу четвертого сумматора, последовательно соединенные второй усилитель, пятый синусный функциональный преобразователь, десятый блок умножения, десятый сумматор и одиннадцатый блок умножения, второй вход которого через квадратор подключен к выходу третьего датчика скорости, а выход - к восьмому входу четвертого сумматора, последовательно соединенные пятый задатчик постоянного сигнала, одиннадцатый сумматор и двенадцатый блок умножения, второй вход которого через последовательно соединенные третий усилитель и шестой синусный функциональный преобразователь подключен к выходу девятого сумматора, а его выход - ко второму входу десятого сумматора, последовательно соединенные двенадцатый сумматор, первый и второй входы которого подключены соответственно к выходам второго датчика положения и второго усилителя, седьмой синусный функциональный преобразователь и тринадцатый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а его выход - к третьему входу десятого сумматора, последовательно соединенные шестой задатчик постоянного сигнала и тринадцатый сумматор, второй вход которого подключен ко второму входу одиннадцатого сумматора и выходу датчика массы, а выход - ко второму входу десятого блока умножения, причем вход второго усилителя соединен с выходом первого датчика положения, последовательно соединенные третий датчик положения, восьмой косинусный функциональный преобразователь, четырнадцатый блок умножения, второй вход которого подключен к выходу второго датчика ускорения, и пятнадцатый блок умножения, выход которого подключен к девятому входу четвертого сумматора, последовательно соединенные девятый косинусный функциональный преобразователь, вход которого подключен к выходу первого датчика положения, шестнадцатый блок умножения, второй вход которого подключен к выходу восьмого сумматора, и четырнадцатый сумматор, выход которого подключен ко второму входу пятнадцатого блока умножения, последовательно соединенные десятый косинусный функциональный преобразователь, вход которого подключен к выходу девятого сумматора, и семнадцатый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а выход - ко второму входу четырнадцатого сумматора, последовательно соединенные пятнадцатый сумматор, первый вход которого подключен к выходу седьмого задатчика постоянного сигнала, а второй вход подключен к выходу второго блока умножения, восемнадцатый блок умножения, второй вход которого подключен к выходу третьего датчика ускорения, установленного на выходном валу электродвигателя, а выход - к третьему входу третьего сумматора, последовательно соединенные девятнадцатый блок умножения, двадцатый блок умножения, второй вход которого через одиннадцатый синусный функциональный преобразователь подключен к выходу третьего датчика положения, двадцать первый блок умножения, выход которого подключен к четвертому входу третьего сумматора, последовательно соединенные четвертый датчик скорости, шестнадцатый сумматор, двадцать второй блок умножения, второй вход которого подключен к выходу седьмого сумматора, двадцать третий блок умножения, второй вход которого через двенадцатый косинусный функциональный преобразователь подключен к выходу двенадцатого сумматора, семнадцатый сумматор, двадцать четвертый блок умножения, второй вход которого подключен к выходу квадратора, а выход - к пятому входу третьего сумматора, последовательно соединенные двадцать пятый блок умножения, первый вход которого через первый дифференциатор подключен к выходу второго датчика ускорения и первому входу девятнадцатого блока умножения, а второй - к выходу восьмого функционального преобразователя, и двадцать шестой блок умножения, второй вход которого подключен к второму входу двадцать первого блока умножения и выходу четырнадцатого сумматора, выход которого подключен к шестому входу третьего сумматора, последовательно соединенные двадцать седьмой блок умножения, первый вход которого подключен к выходу восьмого блока умножения, восемнадцатый сумматор и двадцать восьмой блок умножения, второй вход которого подключен к выходу четырнадцатого блока умножения, а выход - к седьмому входу третьего сумматора, а также двадцать девятый блок умножения, выход которого подключен к восьмому входу третьего сумматора, последовательно соединенные четвертый датчик ускорения, тридцатый блок умножения, второй вход которого подключен к выходу третьего датчика скорости и второму входу девятнадцатого блока умножения, и тридцать первый блок умножения, второй вход которого подключен к выходу десятого сумматора, а выход - к девятому входу третьего сумматора, последовательно соединенные девятнадцатый сумматор и тридцать второй блок умножения, второй вход которого подключен к выходу семнадцатого блока умножения, а выход - к десятому входу третьего сумматора, последовательно соединенные тридцать третий блок умножения, первый вход которого подключен к выходу одиннадцатого сумматора, тридцать четвертый блок умножения, второй вход которого через тринадцатый косинусный функциональный преобразователь подключен к выходу третьего усилителя, а выход - ко второму входу семнадцатого сумматора, последовательно соединенные тридцать пятый блок умножения, первый вход которого подключен к выходу тринадцатого сумматора и тридцать шестой блок умножения, второй вход которого через четырнадцатый косинусный функциональный преобразователь подключен к выходу второго усилителя, а выход - к третьему входу семнадцатого сумматора, а также тридцать седьмой блок умножения, первый вход которого подключен к выходу шестнадцатого блока умножения, второй вход к вторым входам двадцать седьмого и тридцать пятого блоков умножения и первому входу девятнадцатого сумматора, а выход - к одиннадцатому входу третьего сумматора, последовательно соединенные тридцать восьмой блок умножения, первый вход которого подключен к выходу шестого блока умножения, двадцатый сумматор, второй вход которого подключен к выходу тридцать девятого блока умножения, первый вход которого через квадратор подключен к выходу второго датчика скорости, и сороковой блок умножения, второй вход которого подключен к выходу первого датчика скорости, а выход - к двенадцатому входу третьего сумматора, а также сорок первый блок умножения, первый вход которого подключен к выходу девятнадцатого сумматора и второму входу тридцать третьего блока умножения, второй вход к выходу девятого блока умножения, а выход - ко второму входу восемнадцатого сумматора, последовательно соединенные сорок второй блок умножения, первый вход которого подключен к выходу квадратора, а второй - к выходу второго датчика скорости, ко вторым входам шестнадцатого и девятнадцатого сумматоров, к первому входу двадцать девятого блока умножения, второй вход которого подключен к выходу тридцать восьмого блока умножения, и сорок третий блок умножения, второй вход которого подключен к выходу четвертого блока умножения и второму входу тридцать девятого блока умножения, а выход - к тринадцатому входу третьего сумматора, а также сорок четвертый блок умножения, первый вход которого через второй дифференциатор подключен к выходу первого датчика ускорения и ко второму входу тридцать восьмого блока умножения, второй вход - к выходу шестого сумматора, а выход - к четырнадцатому входу третьего сумматора (Патент РФ №2577204, Бюл. №7, 2016). Данное устройство по своей технической сущности является наиболее близким к предлагаемому решению.
Недостатком этого устройства является то, что оно предназначено для электропривода манипулятора, имеющего другую кинематическую схему. В результате оно не будет точно компенсировать все переменные нагрузочные характеристики рассматриваемого электропривода и обеспечивать требуемую динамическую точность его работы.
Задачей, на решение которой направлено заявляемое техническое решение, является обеспечение полной инвариантности динамических свойств рассматриваемого электропривода к непрерывным и быстрым изменениям его динамических моментных нагрузочных характеристик при движении манипулятора с заданной кинематической схемой по всем его степеням подвижности с учетом электрической постоянной времени электродвигателя.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в формировании дополнительного сигнала управления, подаваемого на вход электропривода, который обеспечивает получение моментного воздействия, необходимого для обеспечения полной инвариантности его показателей качества к непрерывно изменяющимся параметрам нагрузки.
Поставленная задача решается тем, что в самонастраивающийся электропривод манипулятора, содержащий последовательно соединенные первый сумматор, второй сумматор, первый блок умножения, третий сумматор, первый усилитель и электродвигатель, связанный непосредственно с первым датчиком скорости и через редуктор - с первым датчиком положения, выход которого подключен к первому входу первого сумматора, соединенного вторым входом со входом устройства, последовательно соединенные второй датчик скорости, второй блок умножения, третий блок умножения и четвертый сумматор, второй вход которого соединен со вторым входом второго сумматора и выходом первого датчика скорости, третий вход - с выходом релейного элемента, подключенного входом ко второму входу третьего блока умножения и выходу первого датчика скорости, а выход - ко второму входу третьего сумматора, последовательно соединенные датчик массы и пятый сумматор, второй вход которого подключен к выходу первого задатчика постоянного сигнала, а выход - ко второму входу первого блока умножения, последовательно соединенные второй датчик положения, первый косинусный функциональный преобразователь, четвертый блок умножения, шестой сумматор, второй вход которого подключен к выходу второго задатчика постоянного сигнала, и пятый блок умножения, второй вход которого подключен к выходу первого датчика ускорения, а выход - к четвертому входу четвертого сумматора, последовательно соединенные третий задатчик постоянного сигнала, седьмой сумматор, второй вход которого подключен к выходу датчика массы, и шестой блок умножения, второй вход которого через второй синусный функциональный преобразователь подключен к выходу второго датчика положения, а выход - к второму входу второго блока умножения, причем второй вход четвертого блока умножения соединен с выходом седьмого сумматора, его выход - с третьим входом пятого сумматора, третий вход шестого сумматора соединен с выходом датчика массы, пятый вход четвертого сумматора через седьмой блок умножения, второй вход которого соединен с выходом второго блока умножения, подключен к выходу второго датчика скорости, последовательно соединенные четвертый задатчик постоянного сигнала, восьмой сумматор, второй вход которого подключен к выходу датчика массы и восьмой блок умножения, второй вход которого через третий синусный функциональный преобразователь соединен с выходом первого датчика положения, а его выход - с шестым входом четвертого сумматора, последовательно соединенные девятый сумматор, первый и второй входы которого подключены соответственно к выходам первого и второго датчиков положения, четвертый синусный функциональный преобразователь и девятый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а выход - к седьмому входу четвертого сумматора, последовательно соединенные второй усилитель, пятый синусный функциональный преобразователь, десятый блок умножения, десятый сумматор и одиннадцатый блок умножения, второй вход которого через квадратор подключен к выходу третьего датчика скорости, а выход - к восьмому входу четвертого сумматора, последовательно соединенные пятый задатчик постоянного сигнала, одиннадцатый сумматор и двенадцатый блок умножения, второй вход которого через последовательно соединенные третий усилитель и шестой синусный функциональный преобразователь подключен к выходу девятого сумматора, а его выход - ко второму входу десятого сумматора, последовательно соединенные двенадцатый сумматор, первый и второй входы которого подключены соответственно к выходам второго датчика положения и второго усилителя, седьмой синусный функциональный преобразователь и тринадцатый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а его выход - к третьему входу десятого сумматора, последовательно соединенные шестой задатчик постоянного сигнала и тринадцатый сумматор, второй вход которого подключен ко второму входу одиннадцатого сумматора и выходу датчика массы, а выход - ко второму входу десятого блока умножения, причем вход второго усилителя соединен с выходом первого датчика положения, последовательно соединенные третий датчик положения, восьмой косинусный функциональный преобразователь, четырнадцатый блок умножения, второй вход которого подключен к выходу второго датчика ускорения, и пятнадцатый блок умножения, выход которого подключен к девятому входу четвертого сумматора, последовательно соединенные девятый косинусный функциональный преобразователь, вход которого подключен к выходу первого датчика положения, шестнадцатый блок умножения, второй вход которого подключен к выходу восьмого сумматора, и четырнадцатый сумматор, выход которого подключен ко второму входу пятнадцатого блока умножения, последовательно соединенные десятый косинусный функциональный преобразователь, вход которого подключен к выходу девятого сумматора, и семнадцатый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а выход - ко второму входу четырнадцатого сумматора, последовательно соединенные пятнадцатый сумматор, первый вход которого подключен к выходу седьмого задатчика постоянного сигнала, а второй - к выходу второго блока умножения, восемнадцатый блок умножения, второй вход которого подключен к выходу третьего датчика ускорения, установленного на выходном валу электродвигателя, а выход - к третьему входу третьего сумматора, последовательно соединенные девятнадцатый блок умножения, двадцатый блок умножения, второй вход которого через одиннадцатый синусный функциональный преобразователь подключен к выходу третьего датчика положения, двадцать первый блок умножения, выход которого подключен к четвертому входу третьего сумматора, последовательно соединенные четвертый датчик скорости, шестнадцатый сумматор, двадцать второй блок умножения, второй вход которого подключен к выходу седьмого сумматора, двадцать третий блок умножения, второй вход которого через двенадцатый косинусный функциональный преобразователь подключен к выходу двенадцатого сумматора, семнадцатый сумматор, двадцать четвертый блок умножения, второй вход которого подключен к выходу квадратора, а выход - к пятому входу третьего сумматора, последовательно соединенные двадцать пятый блок умножения, первый вход которого через первый дифференциатор подключен к выходу второго датчика ускорения и к первому входу девятнадцатого блока умножения, а второй - к выходу восьмого функционального преобразователя, и двадцать шестой блок умножения, второй вход которого подключен к второму входу двадцать первого блока умножения и выходу четырнадцатого сумматора, а выход - к шестому входу третьего сумматора, последовательно соединенные двадцать седьмой блок умножения, первый вход которого подключен к выходу восьмого блока умножения, восемнадцатый сумматор, и двадцать восьмой блок умножения, второй вход которого подключен к выходу четырнадцатого блока умножения, а выход - к седьмому входу третьего сумматора, а также двадцать девятый блок умножения, выход которого подключен к восьмому входу третьего сумматора, последовательно соединенные четвертый датчик ускорения, тридцатый блок умножения, второй вход которого подключен к выходу третьего датчика скорости и второму входу девятнадцатого блока умножения, и тридцать первый блок умножения, второй вход которого подключен к выходу десятого сумматора, а выход - к девятому входу третьего сумматора, последовательно соединенные девятнадцатый сумматор, первый вход которого подключен к выходу четвертого датчика скорости, и тридцать второй блок умножения, второй вход которого подключен к выходу семнадцатого блока умножения, а выход - к десятому входу третьего сумматора, последовательно соединенные тридцать третий блок умножения, первый вход которого подключен к выходу одиннадцатого сумматора, тридцать четвертый блок умножения, второй вход которого через тринадцатый косинусный функциональный преобразователь подключен к выходу третьего усилителя, а выход - ко второму входу семнадцатого сумматора, последовательно соединенные тридцать пятый блок умножения, первый вход которого подключен к выходу тринадцатого сумматора, и тридцать шестой блок умножения, второй вход которого через четырнадцатый косинусный функциональный преобразователь подключен к выходу второго усилителя, а выход - к третьему входу семнадцатого сумматора, а также тридцать седьмой блок умножения, первый вход которого подключен к выходу шестнадцатого блока умножения, второй вход - к вторым входам двадцать седьмого и тридцать пятого блоков умножения и выходу четвертого датчика скорости, а выход - к одиннадцатому входу третьего сумматора последовательно соединенные тридцать восьмой блок умножения, первый вход которого подключен к выходу шестого блока умножения, двадцатый сумматор, второй вход которого подключен к выходу тридцать девятого блока умножения, первый вход которого через квадратор подключен к выходу второго датчика скорости, и сороковой блок умножения, второй вход которого подключен к выходу первого датчика скорости, а выход - к двенадцатому входу третьего сумматора, а также сорок первый блок умножения, первый вход которого подключен к выходу девятнадцатого сумматора и второму входу тридцать третьего блока умножения, второй вход -к выходу девятого блока умножения, а выход - ко второму входу восемнадцатого сумматора, последовательно соединенные сорок второй блок умножения, первый вход которого подключен к выходу квадратора, а второй - к выходу второго датчика скорости, к вторым входам шестнадцатого и девятнадцатого сумматоров, и к первому входу двадцать девятого блока умножения, второй вход которого подключен к выходу тридцать восьмого блока умножения, и сорок третий блок умножения, второй вход которого подключен к выходу четвертого блока умножения и к второму входу тридцать девятого блока умножения, а выход - к тринадцатому входу третьего сумматора, а также сорок четвертый блок умножения, первый вход которого через второй дифференциатор подключен к выходу первого датчика ускорения и к второму входу тридцать восьмого блока умножения, второй вход - к выходу шестого сумматора, а выход - к четырнадцатому входу третьего сумматора, дополнительно вводятся последовательно соединенные третий датчик ускорения, сорок пятый блок умножения и сорок шестой блок умножения, второй вход которого подключен к выходу восемнадцатого сумматора, а выход - к пятнадцатому входу третьего сумматора, последовательно соединенные сорок седьмой блок умножения, первый вход которого подключен к выходу восьмого косинусного функционального преобразователя, сорок восьмой блок умножения, второй вход которого подключен к выходу третьего датчика скорости, и сорок девятый блок умножения, выход которого подключен к шестнадцатому входу третьего сумматора, последовательно соединенные пятидесятый блок умножения, первый вход которого подключен к выходу одиннадцатого синусного функционального преобразователя и второму входу сорок пятого блока умножения, и пятьдесят первый блок умножения, второй вход которого через третий дифференциатор подключен к выходу третьего датчика ускорения и к второму входу сорок девятого блока умножения, а выход - к семнадцатому входу третьего сумматора, и пятьдесят второй блок умножения, первый вход которого подключен к выходу сорок пятого блока умножения, второй - ко вторым входам сорок седьмого и пятидесятого блоков умножения и к выходу четырнадцатого сумматора, а выход - к десятому входу четвертого сумматора.
Сопоставительный анализ существенных признаков предлагаемого технического решения с существенными признаками аналогов и прототипа свидетельствуют о его соответствии критерию «новизна».
При этом отличительные признаки формулы изобретения обеспечивают высокую точность и устойчивость работы рассматриваемого электропривода манипулятора в условиях существенного изменения параметров его нагрузки.
Сущность заявляемого изобретения иллюстрируется чертежами, где
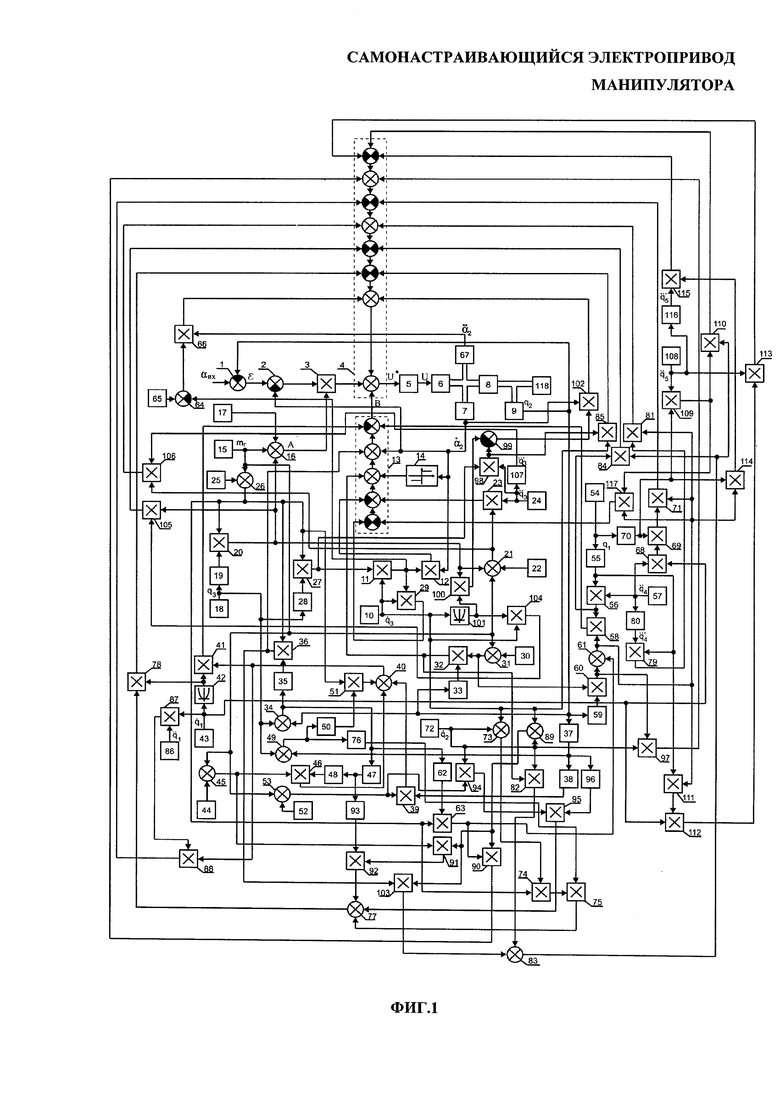
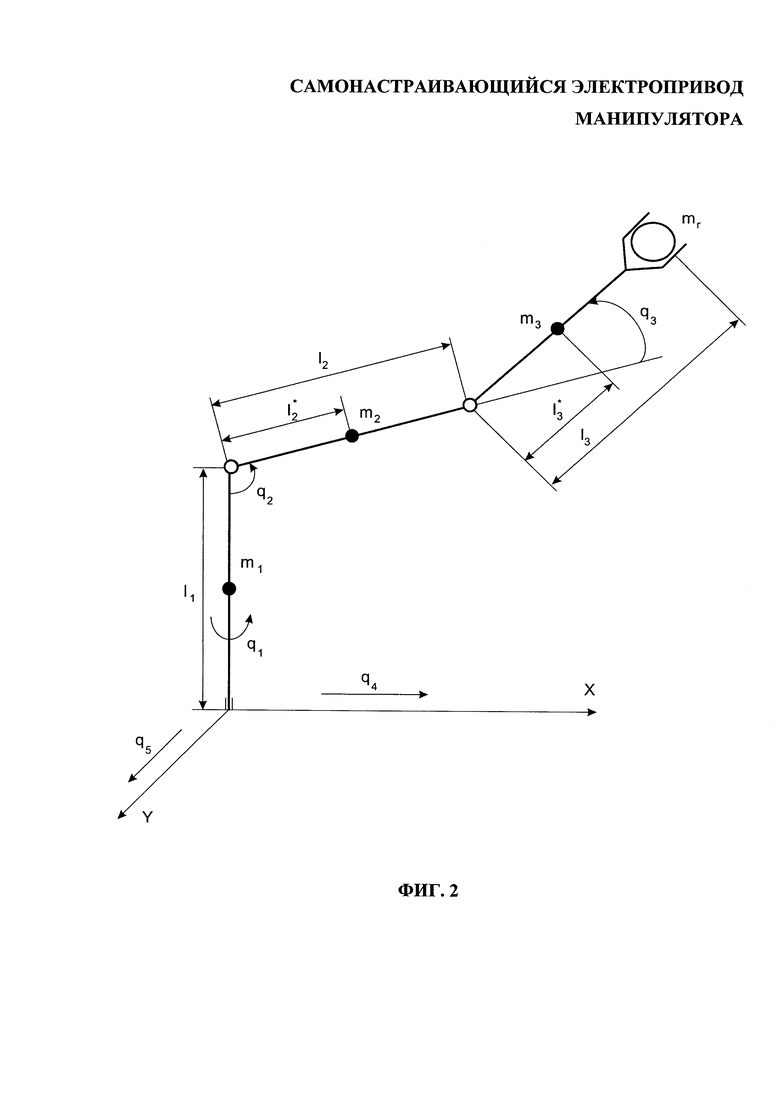
на фиг. 1 дана блок-схема предлагаемого электропривода манипулятора,
на фиг. 2 - кинематическая схема этого манипулятора.
Самонастраивающийся электропривод манипулятора содержит последовательно соединенные первый сумматор 1, второй сумматор 2, первый блок 3 умножения, третий сумматор 4, первый усилитель 5 и электродвигатель 6, связанный непосредственно с первым датчиком 7 скорости и через редуктор 8 - с первым датчиком 9 положения, выход которого подключен к первому входу первого сумматора 1, соединенного вторым входом со входом устройства, последовательно соединенные второй датчик 10 скорости, второй блок 11 умножения, третий блок 12 умножения и четвертый сумматор 13, второй вход которого соединен со вторым входом второго сумматора 2 и выходом первого датчика 7 скорости, третий вход - с выходом релейного элемента 14, подключенного входом ко второму входу третьего блока 12 умножения и выходу первого датчика 7 скорости, а выход - ко второму входу третьего сумматора 4, последовательно соединенные датчик 15 массы и пятый сумматор 16, второй вход которого подключен к выходу первого задатчика 17 постоянного сигнала, а выход - ко второму входу первого блока 3 умножения, последовательно соединенные второй датчик 18 положения, первый косинусный функциональный преобразователь 19, четвертый блок 20 умножения, шестой сумматор 21, второй вход которого подключен к выходу второго задатчика 22 постоянного сигнала, и пятый блок 23 умножения, второй вход которого подключен к выходу первого датчика 24 ускорения, а выход - к четвертому входу четвертого сумматора 13, последовательно соединенные третий задатчик 25 постоянного сигнала, седьмой сумматор 26, второй вход которого подключен к выходу датчика 15 массы, и шестой блок 27 умножения, второй вход которого через второй синусный функциональный преобразователь 28 подключен к выходу второго датчика 18 положения, а выход - к второму входу второго блока 11 умножения, причем второй вход четвертого блока 20 умножения соединен с выходом седьмого сумматора 26, его выход - с третьим входом пятого сумматора 16, третий вход шестого сумматора 21 соединен с выходом датчика 15 массы, пятый вход четвертого сумматора 13 через седьмой блок 29 умножения, второй вход которого соединен с выходом второго блока 11 умножения, подключен к выходу второго датчика 10 скорости, последовательно соединенные четвертый задатчик 30 постоянного сигнала, восьмой сумматор 31, второй вход которого подключен к выходу датчика 15 массы и восьмой блок 32 умножения, второй вход которого через третий синусный функциональный преобразователь 33 соединен с выходом первого датчика 9 положения, а его выход - с шестым входом четвертого сумматора 13, последовательно соединенные девятый сумматор 34, первый и второй входы которого подключены соответственно к выходам первого 9 и второго 18 датчиков положения, четвертый синусный функциональный преобразователь 35 и девятый блок 36 умножения, второй вход которого подключен к выходу седьмого сумматора 26, а выход - к седьмому входу четвертого сумматора 13, последовательно соединенные второй усилитель 37, пятый синусный функциональный преобразователь 38, десятый блок 39 умножения, десятый сумматор 40 и одиннадцатый блок 41 умножения, второй вход которого через квадратор 42 подключен к выходу третьего датчика 43 скорости, а выход - к восьмому входу четвертого сумматора 13, последовательно соединенные пятый задатчик 44 постоянного сигнала, одиннадцатый сумматор 45 и двенадцатый блок 46 умножения, второй вход которого через последовательно соединенные третий усилитель 47 и шестой синусный функциональный преобразователь 48 подключен к выходу девятого сумматора 34, а его выход - ко второму входу десятого сумматора 40, последовательно соединенные двенадцатый сумматор 49, первый и второй входы которого подключены соответственно к выходам второго датчика 18 положения и второго усилителя 37, седьмой синусный функциональный преобразователь 50 и тринадцатый блок 51 умножения, второй вход которого подключен к выходу седьмого сумматора 26, а его выход - к третьему входу десятого сумматора 40, последовательно соединенные шестой задатчик 52 постоянного сигнала и тринадцатый сумматор 53, второй вход которого подключен ко второму входу одиннадцатого сумматора 45 и выходу датчика 15 массы, а выход - ко второму входу десятого блока 39 умножения, причем вход второго усилителя 37 соединен с выходом первого датчика 9 положения, последовательно соединенные третий датчик 54 положения, восьмой косинусный функциональный преобразователь 55, четырнадцатый блок 56 умножения, второй вход которого подключен к выходу второго датчика 57 ускорения, и пятнадцатый блок 58 умножения, выход которого подключен к девятому входу четвертого сумматора 13, последовательно соединенные девятый косинусный функциональный преобразователь 59, вход которого подключен к выходу первого датчика 9 положения, шестнадцатый блок 60 умножения, второй вход которого подключен к выходу восьмого сумматора 31, и четырнадцатый сумматор 61, выход которого подключен ко второму входу пятнадцатого блока 58 умножения, последовательно соединенные десятый косинусный функциональный преобразователь 62, вход которого подключен к выходу девятого сумматора 34, и семнадцатый блок 63 умножения, второй вход которого подключен к выходу седьмого сумматора 26, а выход - ко второму входу четырнадцатого сумматора 61, последовательно соединенные пятнадцатый сумматор 64, первый вход которого подключен к выходу седьмого задатчика 65 постоянного сигнала, а второй - к выходу второго блока 11 умножения, восемнадцатый блок 66 умножения, второй вход которого подключен к выходу третьего датчика 67 ускорения, установленного на выходном валу электродвигателя 6, а выход - к третьему входу третьего сумматора 4, последовательно соединенные девятнадцатый блок 68 умножения, двадцатый блок 69 умножения, второй вход которого через одиннадцатый синусный функциональный преобразователь 70 подключен к выходу третьего датчика 54 положения, двадцать первый блок 71 умножения, выход которого подключен к четвертому входу третьего сумматора 4, последовательно соединенные четвертый датчик 72 скорости, шестнадцатый сумматор 73, двадцать второй блок 74 умножения, второй вход которого подключен к выходу седьмого сумматора 26, двадцать третий блок 75 умножения, второй вход которого через двенадцатый косинусный функциональный преобразователь 76 подключен к выходу двенадцатого сумматора 49, семнадцатый сумматор 77, двадцать четвертый блок 78 умножения, второй вход которого подключен к выходу квадратора 42, а выход - к пятому входу третьего сумматора 4, последовательно соединенные двадцать пятый блок 79 умножения, первый вход которого через первый дифференциатор 80 подключен к выходу второго датчика 57 ускорения и к первому входу девятнадцатого блока 68 умножения, а второй - к выходу восьмого функционального преобразователя 55, и двадцать шестой блок 81 умножения, второй вход которого подключен к второму входу двадцать первого блока 71 умножения и выходу четырнадцатого сумматора 61, а выход - к шестому входу третьего сумматора 4, последовательно соединенные двадцать седьмой блок 82 умножения, первый вход которого подключен к выходу восьмого блока 32 умножения, восемнадцатый сумматор 83, и двадцать восьмой блок 84 умножения, второй вход которого подключен к выходу четырнадцатого блока 56 умножения, а выход - к седьмому входу третьего сумматора 4, а также двадцать девятый блок 85 умножения, выход которого подключен к восьмому входу третьего сумматора 4, последовательно соединенные четвертый датчик 86 ускорения, тридцатый блок 87 умножения, второй вход которого подключен к выходу третьего датчика 43 скорости и второму входу девятнадцатого блока 68 умножения, и тридцать первый блок 88 умножения, второй вход которого подключен к выходу десятого сумматора 40, а выход - к девятому входу третьего сумматора 4, последовательно соединенные девятнадцатый сумматор 89, первый вход которого подключен к выходу четвертого датчика 72 скорости, и тридцать второй блок 90 умножения, второй вход которого подключен к выходу семнадцатого блока 63 умножения, а выход - к десятому входу третьего сумматора 4, последовательно соединенные тридцать третий блок 91 умножения, первый вход которого подключен к выходу одиннадцатого сумматора 45, тридцать четвертый блок 92 умножения, второй вход которого через тринадцатый косинусный функциональный преобразователь 93 подключен к выходу третьего усилителя 47, а выход - ко второму входу семнадцатого сумматора 77, последовательно соединенные тридцать пятый блок 94 умножения, первый вход которого подключен к выходу тринадцатого сумматора 53, и тридцать шестой блок 95 умножения, второй вход которого через четырнадцатый косинусный функциональный преобразователь 96 подключен к выходу второго усилителя 37, а выход - к третьему входу семнадцатого сумматора 77, а также тридцать седьмой блок 97 умножения, первый вход которого подключен к выходу шестнадцатого блока 60 умножения, второй вход - к вторым входам двадцать седьмого 82 и тридцать пятого 94 блоков умножения и выходу четвертого датчика 72 скорости, а выход - к одиннадцатому входу третьего сумматора 4, последовательно соединенные тридцать восьмой блок 98 умножения, первый вход которого подключен к выходу шестого блока 27 умножения, двадцатый сумматор 99, второй вход которого подключен к выходу тридцать девятого блока 100 умножения, первый вход которого через квадратор 101 подключен к выходу второго датчика скорости 10, и сороковой блок 102 умножения, второй вход которого подключен к выходу первого датчика 7 скорости, а выход - к двенадцатому входу третьего сумматора 4, а также сорок первый блок 103 умножения, первый вход которого подключен к выходу девятнадцатого сумматора 89 и второму входу тридцать третьего блока 91 умножения, второй вход - к выходу девятого блока 36 умножения, а выход - ко второму входу восемнадцатого сумматора 83, последовательно соединенные сорок второй блок 104 умножения, первый вход которого подключен к выходу квадратора 101, а второй - к выходу второго датчика 10 скорости, к вторым входам шестнадцатого 73 и девятнадцатого 89 сумматоров, и к первому входу двадцать девятого блока 85 умножения, второй вход которого подключен к выходу тридцать восьмого блока 98 умножения, и сорок третий блок 105 умножения, второй вход которого подключен к выходу четвертого блока 20 умножения и второму входу тридцать девятого блока 100 умножения, а выход - к тринадцатому входу третьего сумматора 4, а также сорок четвертый блок 106 умножения, первый вход которого через второй дифференциатор 107 подключен к выходу первого датчика 24 ускорения и к второму входу тридцать восьмого блока 98 умножения, второй вход - к выходу шестого сумматора 21, а выход - к четырнадцатому входу третьего сумматора 4, последовательно соединенные третий датчик 108 ускорения, сорок пятый блок 109 умножения и сорок шестой блок 110 умножения, второй вход которого подключен к выходу восемнадцатого сумматора 83, а выход - к пятнадцатому входу третьего сумматора 4, последовательно соединенные сорок седьмой блок 111 умножения, первый вход которого подключен к выходу восьмого косинусного функционального преобразователя 55, сорок восьмой блок 112 умножения, второй вход которого подключен к выходу третьего датчика 43 скорости, и сорок девятый блок 113 умножения, выход которого подключен к шестнадцатому входу третьего сумматора 4, последовательно соединенные пятидесятый блок 114 умножения, первый вход которого подключен к выходу одиннадцатого синусного функционального преобразователя 70 и второму входу сорок пятого блока 109 умножения, и пятьдесят первый блок 115 умножения, второй вход которого через третий дифференциатор 116 подключен к выходу третьего датчика 108 ускорения и к второму входу сорок девятого блока 113 умножения, а выход - к семнадцатому входу третьего сумматора 4, и пятьдесят второй блок 117 умножения, первый вход которого подключен к выходу сорок пятого блока 109 умножения, второй - ко вторым входам сорок седьмого 111 и пятидесятого 114 блоков умножения и выходу четырнадцатого сумматора 61, а выход - к десятому входу четвертого сумматора 13. Объект 118 управления.
На рисунках введены следующие обозначения: αвх - сигнал с выхода программного устройства; ε - сигнал ошибки электропривода (величина рассогласования); U*, U - соответственно усиливаемый сигнал и сигнал управления электродвигателем 6; qi - обобщенные координаты соответствующих степеней подвижности манипулятора  ; mi, mг - массы соответствующих звеньев манипулятора и груза
; mi, mг - массы соответствующих звеньев манипулятора и груза  ; l2, l3 - длины соответствующих звеньев;
; l2, l3 - длины соответствующих звеньев;  ,
,  - расстояния от осей вращения соответствующих звеньев манипулятора до их центров масс;
- расстояния от осей вращения соответствующих звеньев манипулятора до их центров масс;  ,
,  - скорости изменения соответствующих обобщенных координат манипулятора;
- скорости изменения соответствующих обобщенных координат манипулятора;  ,
,  - соответственно, скорость и ускорение вращения ротора электродвигателя второй степени подвижности манипулятора;
- соответственно, скорость и ускорение вращения ротора электродвигателя второй степени подвижности манипулятора;  - ускорения соответствующих обобщенных координат; JSi - моменты инерции соответствующих звеньев манипулятора относительно их продольных осей
- ускорения соответствующих обобщенных координат; JSi - моменты инерции соответствующих звеньев манипулятора относительно их продольных осей  ; JNi - моменты инерции соответствующих звеньев манипулятора относительно поперечных осей, проходящих через их центры масс (i=2, 3).
; JNi - моменты инерции соответствующих звеньев манипулятора относительно поперечных осей, проходящих через их центры масс (i=2, 3).
Устройство работает следующим образом. Сигнал ошибки ε с сумматора 1 после коррекции в блоках 2-4, усиливаясь, поступает на электродвигатель 6, приводя его вал во вращательное движение с направлением и скоростью (ускорением), зависящими от величины поступающего сигнала U, моментов трения и внешнего моментного воздействия МВ. Электропривод при работе с различными грузами, а также за счет взаимовлияния степеней подвижности манипулятора, обладает переменными моментными характеристиками, которые могут меняться в широких пределах. Это снижает качественные показатели электропривода и даже приводит к потере устойчивости его работы. В результате возникает задача, связанная с обеспечением инвариантности динамических свойств электропривода к непрерывным и быстрым изменениям его моментных нагрузочных характеристик, что позволяет обеспечить стабильность заданного качества системы управления.
Рассматриваемый электропривод управляет обобщенной координатой q2 манипулятора, конструкция которого позволяет осуществлять горизонтальные прямолинейные перемещения (координаты q4 и q5) и три вращательных движения (координаты q1, q2 и q3).
С помощью уравнений Лагранжа II рода можно записать, что полное моментное воздействие на выходной вал электропривода, управляющего координатой q2, при движении манипулятора (фиг. 2) с грузом имеет вид

где  ,
,
 ,
,
 ,
,
g - ускорение свободного падения.
С учетом соотношения (1), а также уравнений электрической  и механической
и механической  цепей электродвигателя постоянного тока с постоянными магнитами или независимого возбуждения, управляющего координатой q2, этот электродвигатель можно описать дифференциальным уравнением
цепей электродвигателя постоянного тока с постоянными магнитами или независимого возбуждения, управляющего координатой q2, этот электродвигатель можно описать дифференциальным уравнением

где  ,
,  ,
,
 .
.
L, R - соответственно, индуктивность и активное сопротивление якорной цепи электродвигателя; J - момент инерции ротора электродвигателя и вращающихся частей редуктора, приведенных к валу электродвигателя; KM - коэффициент крутящегося момента; Kω - коэффициент противо-ЭДС; KB - коэффициент вязкого трения; ip - передаточное отношение редуктора; МСТР - момент сухого трения; Ky - коэффициент усиления усилителя 5; i - ток якоря электродвигателя.
Очевидно, что параметры уравнения (2), а, следовательно, и параметры электропривода, управляющего координатой q2, являются существенно переменными, зависящими от величин q2, q3,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  и mГ. В результате в процессе работы электропривода меняются (и при том существенно) его динамические свойства. Для реализации поставленной выше задачи необходимо сформировать корректирующее устройство, стабилизирующее параметры этого электропривода и дифференциального уравнения, которым он описывается.
и mГ. В результате в процессе работы электропривода меняются (и при том существенно) его динамические свойства. Для реализации поставленной выше задачи необходимо сформировать корректирующее устройство, стабилизирующее параметры этого электропривода и дифференциального уравнения, которым он описывается.
Первый положительный вход сумматора 2 (со стороны сумматора 1) имеет единичный коэффициент усиления, а его второй отрицательный вход-коэффициент усиления Kω/Ky. Следовательно, на выходе сумматора 2 формируется сигнал  . Первый положительный вход сумматора 26 имеет единичный коэффициент усиления, а задатчик 25 подает на него сигнал
. Первый положительный вход сумматора 26 имеет единичный коэффициент усиления, а задатчик 25 подает на него сигнал  . Второй положительный вход этого сумматора имеет коэффициент усиления l2l3. В результате на его выходе формируется сигнал
. Второй положительный вход этого сумматора имеет коэффициент усиления l2l3. В результате на его выходе формируется сигнал  .
.
Датчик 18 измеряет обобщенную координату q3 манипулятора, а функциональный преобразователь 19 реализует функцию cos q3. В результате на выходе блока 20 формируется сигнал  . Все входы сумматора 16 положительные. Его второй вход (со стороны задатчика 17) имеет единичный коэффициент усиления. Задатчик 17 подает на него сигнал
. Все входы сумматора 16 положительные. Его второй вход (со стороны задатчика 17) имеет единичный коэффициент усиления. Задатчик 17 подает на него сигнал  , где JH - желаемое значение суммарного момента инерции электродвигателя. На первый вход сумматора 16 с коэффициентом усиления
, где JH - желаемое значение суммарного момента инерции электродвигателя. На первый вход сумматора 16 с коэффициентом усиления  датчик 15 подает сигнал mГ. Третий вход этого сумматора имеет коэффициент усиления
датчик 15 подает сигнал mГ. Третий вход этого сумматора имеет коэффициент усиления  . В результате на его выходе формируется сигнал
. В результате на его выходе формируется сигнал  , а на выходе блока 3 - сигнал
, а на выходе блока 3 - сигнал  .
.
Функциональный преобразователь 28 реализует зависимость sin q3. В результате на выходе блока 27 формируется сигнал  .
.
Датчик 10 измеряет скорость  . В результате на первый отрицательный вход сумматора 13 (со стороны блока 12), имеющий коэффициент усиления
. В результате на первый отрицательный вход сумматора 13 (со стороны блока 12), имеющий коэффициент усиления  , поступает сигнал
, поступает сигнал  , а на пятый отрицательный вход этого сумматора (со стороны блока 29), имеющий коэффициент усиления l/ip - сигнал
, а на пятый отрицательный вход этого сумматора (со стороны блока 29), имеющий коэффициент усиления l/ip - сигнал  .
.
Первый и второй положительные входы сумматора 21 (со стороны блока 20 и задатчика 22) имеют единичные коэффициенты усиления, а его третий положительный вход - коэффициент усиления  . Задатчик 22 формирует сигнал
. Задатчик 22 формирует сигнал  , а датчик 24 измеряет ускорение
, а датчик 24 измеряет ускорение  . В результате на выходе блока 23 формируется сигнал
. В результате на выходе блока 23 формируется сигнал  , который поступает на четвертый положительный вход сумматора 13 с коэффициентом усиления l/ip. Второй и третий положительные входы сумматора 13 (соответственно, со стороны датчика 7 и элемента 14), соответственно, имеют коэффициент усиления, равный KMKω/R+KB, и единичный коэффициент усиления.
, который поступает на четвертый положительный вход сумматора 13 с коэффициентом усиления l/ip. Второй и третий положительные входы сумматора 13 (соответственно, со стороны датчика 7 и элемента 14), соответственно, имеют коэффициент усиления, равный KMKω/R+KB, и единичный коэффициент усиления.
Выходной сигнал элемента 14 имеет вид 
где MT - величина момента сухого трения при движении.
Первый и второй положительные входы сумматора 34 имеют единичные коэффициенты усиления, а функциональный преобразователь 35 реализует зависимость sin(q2+q3). В результате на выходе блока 36 формируется сигнал  , который поступает на седьмой положительный вход сумматора 13 с коэффициентом усиления g/(l2iP).
, который поступает на седьмой положительный вход сумматора 13 с коэффициентом усиления g/(l2iP).
Задатчик 30 вырабатывает сигнал  и подает его на первый положительный вход сумматора 31, имеющий единичный коэффициент усиления, второй положительный вход этого сумматора имеет коэффициент усиления, равный l2. Функциональный преобразователь 33 реализует зависимость sinq2. В результате на выходе блока 32 формируется сигнал
и подает его на первый положительный вход сумматора 31, имеющий единичный коэффициент усиления, второй положительный вход этого сумматора имеет коэффициент усиления, равный l2. Функциональный преобразователь 33 реализует зависимость sinq2. В результате на выходе блока 32 формируется сигнал  , который поступает на шестой положительный вход сумматора 13, имеющий коэффициент усиления g/iP.
, который поступает на шестой положительный вход сумматора 13, имеющий коэффициент усиления g/iP.
Положительные входы сумматора 49 имеют единичные коэффициенты усиления. Усилители 37 и 47 имеют коэффициенты усиления, равные 2. Функциональные преобразователи 38, 48, 50 и 70 реализуют функцию sin. В результате на выходе блока 51 формируется сигнал  .
.
Задатчик 44 вырабатывает сигнал  . Первый (со стороны этого задатчика) положительный вход сумматора 45 имеет единичный коэффициент усиления, а его второй положительный вход - коэффициент усиления, равный
. Первый (со стороны этого задатчика) положительный вход сумматора 45 имеет единичный коэффициент усиления, а его второй положительный вход - коэффициент усиления, равный  . В результате на выходе блока 46 формируется сигнал
. В результате на выходе блока 46 формируется сигнал  .
.
Задатчик 52 вырабатывает сигнал, равный  . Первый (со стороны этого задатчика) положительный вход сумматора 53 имеет единичный коэффициент усиления, а его второй положительный вход - коэффициент усиления, равный
. Первый (со стороны этого задатчика) положительный вход сумматора 53 имеет единичный коэффициент усиления, а его второй положительный вход - коэффициент усиления, равный  . В результате на выходе блока 39 формируется сигнал
. В результате на выходе блока 39 формируется сигнал  .
.
Первый (со стороны блока 39) и второй (со стороны блока 46) положительные входы сумматора 40 имеют единичные коэффициенты усиления, а его третий положительный вход - коэффициент усиления, равный 2. Датчик 43 измеряет скорость изменения координаты  . В результате на выходе блока 41 формируется сигнал
. В результате на выходе блока 41 формируется сигнал  , который с коэффициентом усиления 1/(2iP) подается на восьмой отрицательный вход сумматора 13.
, который с коэффициентом усиления 1/(2iP) подается на восьмой отрицательный вход сумматора 13.
Датчик 54 измеряет координату q1. Функциональные преобразователи 55, 59 и 62 реализует функцию cos. Датчики 57 и 108 измеряют ускорения  и
и  , соответственно. В результате на выходе блока 56 формируется сигнал
, соответственно. В результате на выходе блока 56 формируется сигнал  cos ql, на выходе блока 109 - сигнал
cos ql, на выходе блока 109 - сигнал  , на выходе блока 60 - сигнал
, на выходе блока 60 - сигнал  , а на выходе блока 63 - сигнал
, а на выходе блока 63 - сигнал  . Первый (со стороны блока 60) и второй положительные входы сумматора 61 имеют, соответственно, единичный коэффициент усиления и коэффициент усиления, равный 1/12. В результате на выходе блока 58 формируется сигнал
. Первый (со стороны блока 60) и второй положительные входы сумматора 61 имеют, соответственно, единичный коэффициент усиления и коэффициент усиления, равный 1/12. В результате на выходе блока 58 формируется сигнал  , подаваемый на девятый положительный, а на выходе блока 117 - сигнал
, подаваемый на девятый положительный, а на выходе блока 117 - сигнал  , подаваемый на десятый отрицательный входы сумматора 13, имеющие коэффициенты усиления, равные 1/iP. В результате на выходе этого сумматора формируется сигнал
, подаваемый на десятый отрицательный входы сумматора 13, имеющие коэффициенты усиления, равные 1/iP. В результате на выходе этого сумматора формируется сигнал  .
.
Датчик 67 измеряет ускорение  . На выходе задатчика 65 формируется сигнал KB, который подается на первый положительный вход сумматора 64, имеющий единичный коэффициент усиления. Его второй отрицательный вход имеет коэффициент усиления, равный
. На выходе задатчика 65 формируется сигнал KB, который подается на первый положительный вход сумматора 64, имеющий единичный коэффициент усиления. Его второй отрицательный вход имеет коэффициент усиления, равный  . В результате на выходе сумматора 64 формируется сигнал
. В результате на выходе сумматора 64 формируется сигнал  , а на выходе блока 66 - сигнал
, а на выходе блока 66 - сигнал  , который подается на третий положительный вход сумматора 4, имеющий коэффициент усиления, равный L/(KMKy).
, который подается на третий положительный вход сумматора 4, имеющий коэффициент усиления, равный L/(KMKy).
На выходе блока 71 формируется сигнал  , а на выходе блока 113 - сигнал
, а на выходе блока 113 - сигнал  , подаваемые, соответственно, на четвертый и шестнадцатый отрицательные входы сумматора 4, имеющие коэффициенты усиления, равные L/(KMKyip).
, подаваемые, соответственно, на четвертый и шестнадцатый отрицательные входы сумматора 4, имеющие коэффициенты усиления, равные L/(KMKyip).
Датчик 72 - скорость  . На выходе сумматора 89, имеющего положительные входы с единичными коэффициентами усиления, формируется сигнал
. На выходе сумматора 89, имеющего положительные входы с единичными коэффициентами усиления, формируется сигнал  . Первый (со стороны датчика 72) и второй (со стороны датчика 10) положительные входы сумматора 73 имеют коэффициенты усиления, равные 2 и 1, соответственно. В результате на его выходе формируется сигнал, равный
. Первый (со стороны датчика 72) и второй (со стороны датчика 10) положительные входы сумматора 73 имеют коэффициенты усиления, равные 2 и 1, соответственно. В результате на его выходе формируется сигнал, равный  . Все входы сумматора 77 положительны и имеют единичные коэффициенты усиления. В результате на выходе блока 78 формируется сигнал
. Все входы сумматора 77 положительны и имеют единичные коэффициенты усиления. В результате на выходе блока 78 формируется сигнал  ,
,
подаваемый на пятый отрицательный вход сумматора 4, имеющий коэффициент усиления, равный L/(KMKyip).
Дифференциаторы 80 и 107 и 115 используется для получения сигналов  ,
,  и
и  , соответственно. На выходе блока 81 формируется сигнал
, соответственно. На выходе блока 81 формируется сигнал  , а на выходе блока 115 - сигнал
, а на выходе блока 115 - сигнал  , подаваемые, соответственно, на шестой положительный и семнадцатый отрицательный входы сумматора 4, имеющие коэффициенты усиления, равные L/(KMKyip).
, подаваемые, соответственно, на шестой положительный и семнадцатый отрицательный входы сумматора 4, имеющие коэффициенты усиления, равные L/(KMKyip).
Первый (со стороны блока 82) и второй положительные входы сумматора 83 имеют, соответственно, единичный коэффициент усиления и коэффициент усиления, равный l/l2. В результате на выходе блока 84 формируется сигнал  , а на выходе блока 110 - сигнал
, а на выходе блока 110 - сигнал  , подаваемые, соответственно, на седьмой отрицательный и пятнадцатый положительный входы сумматора 4, имеющие коэффициенты усиления, равные L/(KMKyip).
, подаваемые, соответственно, на седьмой отрицательный и пятнадцатый положительный входы сумматора 4, имеющие коэффициенты усиления, равные L/(KMKyip).
На выходе блока 85 формируется сигнал  , подаваемый на восьмой отрицательный вход сумматора 4, имеющий коэффициент усиления, равный 3L/(KMKyip).
, подаваемый на восьмой отрицательный вход сумматора 4, имеющий коэффициент усиления, равный 3L/(KMKyip).
Датчик 86 измеряет ускорение  . На выходе блока 88 формируется сигнал
. На выходе блока 88 формируется сигнал  , подаваемый на девятый отрицательный вход сумматора 4, имеющий коэффициент усиления, равный L/(KMKyip), на выходе блока 91 - сигнал
, подаваемый на девятый отрицательный вход сумматора 4, имеющий коэффициент усиления, равный L/(KMKyip), на выходе блока 91 - сигнал  , подаваемый на десятый положительный вход сумматора 4, имеющий коэффициент усиления, равный gL/(KMKyl2ip), а на выходе блока 97 - сигнал
, подаваемый на десятый положительный вход сумматора 4, имеющий коэффициент усиления, равный gL/(KMKyl2ip), а на выходе блока 97 - сигнал  , подаваемый на одиннадцатый положительный вход сумматора 4, имеющий коэффициент усиления, равный gL/(KMKyip).
, подаваемый на одиннадцатый положительный вход сумматора 4, имеющий коэффициент усиления, равный gL/(KMKyip).
На выходе блока 100 формируется сигнал  , а на выходе блока 98 - сигнал
, а на выходе блока 98 - сигнал  . Первый и второй отрицательные входы сумматора 99 имеют коэффициенты усиления, равные
. Первый и второй отрицательные входы сумматора 99 имеют коэффициенты усиления, равные  . В результате на выходе блока 102 формируется сигнал
. В результате на выходе блока 102 формируется сигнал  , поступающий на двенадцатый положительный вход сумматора 4, имеющий коэффициент усиления, равный L/(KMKy).
, поступающий на двенадцатый положительный вход сумматора 4, имеющий коэффициент усиления, равный L/(KMKy).
На выходе блоков 105 и 106 формируются сигналы  и
и  , поступающие на тринадцатый отрицательный и четырнадцатый положительный и входы сумматора 4, соответственно, имеющие коэффициенты усиления, равные L/(KMKyip).
, поступающие на тринадцатый отрицательный и четырнадцатый положительный и входы сумматора 4, соответственно, имеющие коэффициенты усиления, равные L/(KMKyip).
Первый положительный вход сумматора 4 (со стороны блока 3) имеет единичный коэффициент усиления, а его второй положительный вход (со стороны сумматора 13) - коэффициент усиления R/(KMKy). В результате на выходе сумматора 4 формируется сигнал  , равный
, равный

Поскольку при движении электропривода  достаточно точно соответствует Мстр, то сигнал
достаточно точно соответствует Мстр, то сигнал  , как несложно убедиться, обеспечивает превращение уравнения (2) с существенно переменными параметрами в уравнение
, как несложно убедиться, обеспечивает превращение уравнения (2) с существенно переменными параметрами в уравнение  с постоянными номинальными желаемыми параметрами, обеспечивающими рассматриваемому электроприводу заданные динамические свойства и показатели качества.
с постоянными номинальными желаемыми параметрами, обеспечивающими рассматриваемому электроприводу заданные динамические свойства и показатели качества.
Таким образом, за счет введения дополнительных элементов и связей удалось обеспечить полную инвариантность рассматриваемого электропривода к эффектам взаимовлияния между всеми степенями подвижности манипулятора и моментам трения. Это позволяет получить стабильно высокое качество управления в любых режимах работы этого электропривода. Практическая реализация предлагаемого устройства не вызывает затруднений, так как в нем использованы только типовые электронные элементы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2007 |
|
RU2355563C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2017 |
|
RU2688449C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2014 |
|
RU2551044C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2012 |
|
RU2489251C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2019 |
|
RU2725447C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2705734C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2019 |
|
RU2725449C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2014 |
|
RU2577204C2 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2012 |
|
RU2487008C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2015 |
|
RU2593735C1 |
Изобретение относится к самонастраивающейся системе управления электроприводом. Самонастраивающийся электропривод манипуляционного робота содержит электродвигатель, редуктор, датчики положения и скорости, датчики ускорения, датчик массы, сумматоры, блоки умножения, задатчики сигнала, квадратор, дифференциаторы, релейный элемент, усилители и функциональные преобразователи: синусные и косинусные. В изобретении дополнительные блоки, а также соответствующие связи обеспечивают полную инвариантность электропривода манипулятора к эффектам взаимовлияния между всеми степенями подвижности манипулятора и моментом трения, что позволяет получить стабильно высокое качество управления в любых режимах работы этого электропривода. Технический результат заключается в обеспечении полной инвариантности показателей качества электропривода к непрерывно изменяющимся параметрам нагрузки. 2 ил.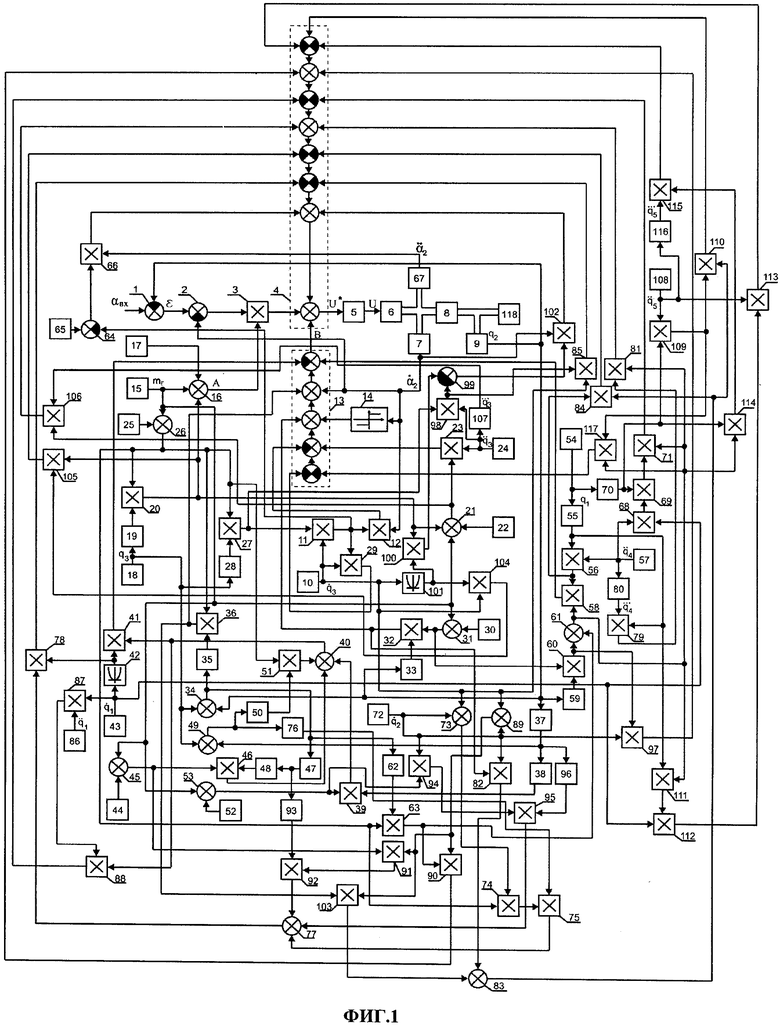
Самонастраивающийся электропривод манипулятора, содержащий последовательно соединенные первый сумматор, второй сумматор, первый блок умножения, третий сумматор, первый усилитель и электродвигатель, связанный непосредственно с первым датчиком скорости и через редуктор - с первым датчиком положения, выход которого подключен к первому входу первого сумматора, соединенного вторым входом со входом устройства, последовательно соединенные второй датчик скорости, второй блок умножения, третий блок умножения и четвертый сумматор, второй вход которого соединен со вторым входом второго сумматора и выходом первого датчика скорости, третий вход - с выходом релейного элемента, подключенного входом ко второму входу третьего блока умножения и выходу первого датчика скорости, а выход - ко второму входу третьего сумматора, последовательно соединенные датчик массы и пятый сумматор, второй вход которого подключен к выходу первого задатчика постоянного сигнала, а выход - ко второму входу первого блока умножения, последовательно соединенные второй датчик положения, первый косинусный функциональный преобразователь, четвертый блок умножения, шестой сумматор, второй вход которого подключен к выходу второго задатчика постоянного сигнала, и пятый блок умножения, второй вход которого подключен к выходу первого датчика ускорения, а выход - к четвертому входу четвертого сумматора, последовательно соединенные третий задатчик постоянного сигнала, седьмой сумматор, второй вход которого подключен к выходу датчика массы, и шестой блок умножения, второй вход которого через второй синусный функциональный преобразователь подключен к выходу второго датчика положения, а выход - к второму входу второго блока умножения, причем второй вход четвертого блока умножения соединен с выходом седьмого сумматора, его выход - с третьим входом пятого сумматора, третий вход шестого сумматора соединен с выходом датчика массы, пятый вход четвертого сумматора через седьмой блок умножения, второй вход которого соединен с выходом второго блока умножения, подключен к выходу второго датчика скорости, последовательно соединенные четвертый задатчик постоянного сигнала, восьмой сумматор, второй вход которого подключен к выходу датчика массы, и восьмой блок умножения, второй вход которого через третий синусный функциональный преобразователь соединен с выходом первого датчика положения, а его выход - с шестым входом четвертого сумматора, последовательно соединенные девятый сумматор, первый и второй входы которого подключены соответственно к выходам первого и второго датчиков положения, четвертый синусный функциональный преобразователь и девятый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а выход - к седьмому входу четвертого сумматора, последовательно соединенные второй усилитель, пятый синусный функциональный преобразователь, десятый блок умножения, десятый сумматор и одиннадцатый блок умножения, второй вход которого через квадратор подключен к выходу третьего датчика скорости, а выход - к восьмому входу четвертого сумматора, последовательно соединенные пятый задатчик постоянного сигнала, одиннадцатый сумматор и двенадцатый блок умножения, второй вход которого через последовательно соединенные третий усилитель и шестой синусный функциональный преобразователь подключен к выходу девятого сумматора, а его выход - ко второму входу десятого сумматора, последовательно соединенные двенадцатый сумматор, первый и второй входы которого подключены соответственно к выходам второго датчика положения и второго усилителя, седьмой синусный функциональный преобразователь и тринадцатый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а его выход - к третьему входу десятого сумматора, последовательно соединенные шестой задатчик постоянного сигнала и тринадцатый сумматор, второй вход которого подключен ко второму входу одиннадцатого сумматора и выходу датчика массы, а выход - ко второму входу десятого блока умножения, причем вход второго усилителя соединен с выходом первого датчика положения, последовательно соединенные третий датчик положения, восьмой косинусный функциональный преобразователь, четырнадцатый блок умножения, второй вход которого подключен к выходу второго датчика ускорения, и пятнадцатый блок умножения, выход которого подключен к девятому входу четвертого сумматора, последовательно соединенные девятый косинусный функциональный преобразователь, вход которого подключен к выходу первого датчика положения, шестнадцатый блок умножения, второй вход которого подключен к выходу восьмого сумматора, и четырнадцатый сумматор, выход которого подключен ко второму входу пятнадцатого блока умножения, последовательно соединенные десятый косинусный функциональный преобразователь, вход которого подключен к выходу девятого сумматора, и семнадцатый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а выход - ко второму входу четырнадцатого сумматора, последовательно соединенные пятнадцатый сумматор, первый вход которого подключен к выходу седьмого задатчика постоянного сигнала, а второй - к выходу второго блока умножения, восемнадцатый блок умножения, второй вход которого подключен к выходу третьего датчика ускорения, установленного на выходном валу электродвигателя, а выход - к третьему входу третьего сумматора, последовательно соединенные девятнадцатый блок умножения, двадцатый блок умножения, второй вход которого через одиннадцатый синусный функциональный преобразователь подключен к выходу третьего датчика положения, двадцать первый блок умножения, выход которого подключен к четвертому входу третьего сумматора, последовательно соединенные четвертый датчик скорости, шестнадцатый сумматор, двадцать второй блок умножения, второй вход которого подключен к выходу седьмого сумматора, двадцать третий блок умножения, второй вход которого через двенадцатый косинусный функциональный преобразователь подключен к выходу двенадцатого сумматора, семнадцатый сумматор, двадцать четвертый блок умножения, второй вход которого подключен к выходу квадратора, а выход - к пятому входу третьего сумматора, последовательно соединенные двадцать пятый блок умножения, первый вход которого через первый дифференциатор подключен к выходу второго датчика ускорения и к первому входу девятнадцатого блока умножения, а второй - к выходу восьмого функционального преобразователя, и двадцать шестой блок умножения, второй вход которого подключен к второму входу двадцать первого блока умножения и выходу четырнадцатого сумматора, а выход - к шестому входу третьего сумматора, последовательно соединенные двадцать седьмой блок умножения, первый вход которого подключен к выходу восьмого блока умножения, восемнадцатый сумматор, и двадцать восьмой блок умножения, второй вход которого подключен к выходу четырнадцатого блока умножения, а выход - к седьмому входу третьего сумматора, а также двадцать девятый блок умножения, выход которого подключен к восьмому входу третьего сумматора, последовательно соединенные четвертый датчик ускорения, тридцатый блок умножения, второй вход которого подключен к выходу третьего датчика скорости и второму входу девятнадцатого блока умножения, и тридцать первый блок умножения, второй вход которого подключен к выходу десятого сумматора, а выход - к девятому входу третьего сумматора, последовательно соединенные девятнадцатый сумматор, первый вход которого подключен к выходу четвертого датчика скорости, и тридцать второй блок умножения, второй вход которого подключен к выходу семнадцатого блока умножения, а выход - к десятому входу третьего сумматора, последовательно соединенные тридцать третий блок умножения, первый вход которого подключен к выходу одиннадцатого сумматора, тридцать четвертый блок умножения, второй вход которого через тринадцатый косинусный функциональный преобразователь подключен к выходу третьего усилителя, а выход - ко второму входу семнадцатого сумматора, последовательно соединенные тридцать пятый блок умножения, первый вход которого подключен к выходу тринадцатого сумматора, и тридцать шестой блок умножения, второй вход которого через четырнадцатый косинусный функциональный преобразователь подключен к выходу второго усилителя, а выход - к третьему входу семнадцатого сумматора, а также тридцать седьмой блок умножения, первый вход которого подключен к выходу шестнадцатого блока умножения, второй вход - к вторым входам двадцать седьмого и тридцать пятого блоков умножения и выходу четвертого датчика скорости, а выход - к одиннадцатому входу третьего сумматора, последовательно соединенные тридцать восьмой блок умножения, первый вход которого подключен к выходу шестого блока умножения, двадцатый сумматор, второй вход которого подключен к выходу тридцать девятого блока умножения, первый вход которого через квадратор подключен к выходу второго датчика скорости, и сороковой блок умножения, второй вход которого подключен к выходу первого датчика скорости, а выход - к двенадцатому входу третьего сумматора, а также сорок первый блок умножения, первый вход которого подключен к выходу девятнадцатого сумматора и второму входу тридцать третьего блока умножения, второй вход - к выходу девятого блока умножения, а выход - ко второму входу восемнадцатого сумматора, последовательно соединенные сорок второй блок умножения, первый вход которого подключен к выходу квадратора, а второй - к выходу второго датчика скорости, к вторым входам шестнадцатого и девятнадцатого сумматоров и к первому входу двадцать девятого блока умножения, второй вход которого подключен к выходу тридцать восьмого блока умножения, и сорок третий блок умножения, второй вход которого подключен к выходу четвертого блока умножения и к второму входу тридцать девятого блока умножения, а выход - к тринадцатому входу третьего сумматора, а также сорок четвертый блок умножения, первый вход которого через второй дифференциатор подключен к выходу первого датчика ускорения и к второму входу тридцать восьмого блока умножения, второй вход - к выходу шестого сумматора, а выход - к четырнадцатому входу третьего сумматора, отличающийся тем, что в него дополнительно введены последовательно соединенные третий датчик ускорения, сорок пятый блок умножения и сорок шестой блок умножения, второй вход которого подключен к выходу восемнадцатого сумматора, а выход - к пятнадцатому входу третьего сумматора, последовательно соединенные сорок седьмой блок умножения, первый вход которого подключен к выходу восьмого косинусного функционального преобразователя, сорок восьмой блок умножения, второй вход которого подключен к выходу третьего датчика скорости, и сорок девятый блок умножения, выход которого подключен к шестнадцатому входу третьего сумматора, последовательно соединенные пятидесятый блок умножения, первый вход которого подключен к выходу одиннадцатого синусного функционального преобразователя и второму входу сорок пятого блока умножения, и пятьдесят первый блок умножения, второй вход которого через третий дифференциатор подключен к выходу третьего датчика ускорения и к второму входу сорок девятого блока умножения, а выход - к семнадцатому входу третьего сумматора, и пятьдесят второй блок умножения, первый вход которого подключен к выходу сорок пятого блока умножения, второй - ко вторым входам сорок седьмого и пятидесятого блоков умножения и к выходу четырнадцатого сумматора, а выход - к десятому входу четвертого сумматора.
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2014 |
|
RU2577204C2 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2011 |
|
RU2453893C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2008 |
|
RU2372186C1 |
| US 8428779 B2, 23.04.2013. | |||

