Перекрестная ссылка на родственные заявки
Данная заявка притязает на приоритет предварительной заявки США № 61/710,582, озаглавленной «Identifying Dominant Fracture Orientations», поданной 5 октября 2012 г., и заявки на изобретение США № 13/896,245, озаглавленной «Propagating Fracture Plane Updates», поданной 17 мая 2013 г.
Уровень техники
Данное описание изобретения относится к управлению микросейсмическими данными, например, в процессе соответствия разрыва. Микросейсмические данные часто получают в связи с обработками по гидравлическому разрыву пласта, применяемыми к подземному пласту. Обработки по гидравлическому разрыву пласта обычно применяются для того, чтобы вызвать искусственные разрывы в подземном пласте и, таким образом, повысить продуктивность углеводородов подземного пласта. Давления, создаваемые обработкой по гидравлическому разрыву пласта, могут вызывать сейсмические события с малой амплитудой или малой энергией в подземном пласте, и события могут обнаруживаться датчиками и собираться для анализа.
Раскрытие изобретения
В одном общем аспекте ранее сгенерированные плоскости разрыва обновляются на основе микросейсмических данных, ассоциированных с обработкой по гидравлическому разрыву пласта.
В некоторых аспектах первая плоскость разрыва обновляется на основе микросейсмического события, ассоциированного с обработкой по гидравлическому разрыву пласта. Первая плоскость разрыва является одной из многочисленных плоскостей разрыва, которые были ранее сгенерированы на основе предшествующих микросейсмических данных. Ранее сгенерированные плоскости разрыва также включают в себя вторую, другую плоскость разрыва, которая обновляется в ответ на обновление первой плоскости разрыва.
Реализации могут включать в себя один или несколько из следующих признаков. Обновление второй плоскости разрыва включает в себя объединение первой плоскости разрыва и второй плоскости разрыва. Первая плоскость разрыва и вторая плоскость разрыва объединяются в ответ на определение, что первая плоскость разрыва и вторая плоскость разрыва разделяются расстоянием, которое меньше порогового расстояния. Первая плоскость разрыва и вторая плоскость разрыва объединяются в ответ на определение, что первая плоскость разрыва и вторая плоскость разрыва пересекаются под углом, который меньше порогового угла.
Дополнительно или альтернативно, эти и другие реализации могут включать в себя один или несколько из следующих признаков. Микросейсмическое событие включает в себя первое микросейсмическое событие. Обновление первой плоскости разрыва вызывает то, что второе, другое микросейсмическое событие становится диссоциированным от первой плоскости разрыва. Обновление второй плоскости разрыва включает в себя ассоциирование второго микросейсмического события со второй плоскостью разрыва; и обновление второй плоскости разрыва, основываясь на втором микросейсмическом событии.
Дополнительно или альтернативно, эти и другие реализации могут включать в себя один или несколько из следующих признаков. Микросейсмическое событие включает в себя первое микросейсмическое событие. Обновление первой плоскости разрыва вызывает то, что второе, другое микросейсмическое событие становится ассоциированным с первой плоскостью разрыва и диссоциированным от второй плоскости разрыва. Обновление второй плоскости разрыва включает в себя обновление второй плоскости разрыва, основываясь на втором микросейсмическом событии, которое становится диссоциированным от второй плоскости разрыва.
Подробности одной или нескольких реализаций излагаются на прилагаемых чертежах и в описании ниже. Другие признаки, задачи и преимущества очевидны из описания и чертежей и из формулы изобретения.
Краткое описание чертежей
Фиг.1A представляет собой схему примерной скважинной системы; фиг.1B представляет собой схему примерной вычислительной подсистемы 110 фиг.1A.
Фиг.2 представляет собой примерную систему для управления микросейсмическими данными.
Фиг.3A-3F представляет собой графики, изображающие обновления для примерной плоскости разрыва.
Фиг.4 представляет собой блок-схему последовательности операций примерного метода для обновления плоскостей разрыва.
Подобные ссылочные позиции на различных чертежах обозначают подобные элементы.
Осуществление изобретения
В некоторых аспектах того, что описано в данном документе, параметры разрыва, преобладающие ориентации разрыва или другие данные идентифицируются из микросейсмических данных. В некоторых случаях эти и другие типы данных идентифицируются динамически, например, в реальном времени во время обработки по гидравлическому разрыву пласта. Для многих применений и методов анализа необходимо идентифицирование плоскостей разрыва из микросейсмических событий в реальном времени, и индивидуальные плоскости разрыва могут отображаться, чтобы показывать развитие во времени и геометрическое исключение, включая местоположение, распространение, рост, уменьшение или исключение плоскостей разрыва. Такие возможности могут быть встроены в системы управления, программное обеспечение, аппаратное обеспечение или другие типы инструментальных средств, доступных для инженеров нефтяных и газовых месторождений, когда они анализируют потенциальные нефтяные и газовые месторождения, побуждая гидравлические разрывы и анализируя результирующие сигналы. Такие инструментальные средства могут обеспечивать надежный и непосредственный интерфейс для представления и визуализации динамики гидравлических разрывов, который может помогать при анализе сложности разрыва, структуры сетки трещин и геометрии коллектора. Такие инструментальные средства могут помогать при оценке эффективности обработки по гидравлическому разрыву пласта, например, посредством улучшения, увеличения или оптимизирования плотности расположения трещин гидравлического разрыва и длин и высот трассы. Такие улучшения в обработке по гидравлическому разрыву пластов, применяемой к коллектору, могут увеличить производительность углеводородов или других ресурсов из коллектора.
Обработки по гидравлическому разрыву пласта могут применяться в любой подходящей подземной зоне. Обработки по гидравлическому разрыву пласта часто применяются в пластах с малой проницаемостью с малопроницаемыми коллекторами, которые могут включать в себя, например, малопроницаемые обычные нефтяные и газовые коллекторы, зоны нефтегазонакопления нетрадиционного типа с непрерывным бассейном и коллекторы сланцевого газа, или другие типы пластов. Гидравлический разрыв может вызывать искусственные разрывы в геологической среде, которые могут увеличить продуктивность углеводородов коллектора.
Во время применения обработки по гидравлическому разрыву пласта нагнетание текучих сред под высоким давлением может изменить напряжения, накопить касательные напряжения и вызвать другие эффекты в геологическом строении среды. В некоторых случаях микросейсмические события ассоциируются с гидравлическими разрывами, вызванными деятельностью разрыва. Акустическая энергия или звуки, ассоциированные с напряжениями в горных породах, деформациями и разрывами могут обнаруживаться и собираться датчиками. В некоторых случаях микросейсмические события имеют низкую энергию (например, со значением логарифма интенсивности или магнитуды по сейсмическому моменту менее трех), и некоторая неопределенность точности или ошибка измерения ассоциируется с местоположениями события. Неопределенность может описываться, например, вытянутым сфероидом, где наибольшая вероятность находится на центре сфероида, и наименьшая вероятность находится на краю.
Картирование микросейсмического события может использоваться для геометрического определения местоположения точки источника микросейсмических событий, основываясь на обнаруженных продольных и поперечных волнах. Обнаруженные продольные и поперечные волны (например, p-волны и s-волны) могут давать дополнительную информацию о микросейсмических событиях, включая местоположение точки источника, местоположение события и неопределенность измерения положения, время наступления события, магнитуду по сейсмическому моменту события, направление движения частиц и спектр излучения энергии и возможно другие. Мониторинг микросейсмических событий может выполняться в реальном времени и, в некоторых случаях события также обрабатываются в реальном времени по время обработки по гидравлическому разрыву пласта. В некоторых случаях после обработки по гидравлическому разрыву пласта микросейсмические события, собранные с обработки, обрабатываются вместе как «пост-данные».
Обработка данных микросейсмических событий, собранных в результате обработки по гидравлическому разрыву пласта, может включать в себя соответствие разрыва (также называемое картирование разрыва). Процессы соответствия разрыва могут определять плоскости разрыва в любой зоне, основываясь на микросейсмических событиях, собранных из зоны. Некоторые примерные вычислительные алгоритмы для соответствия разрыва используют данные микросейсмического события (например, местоположение события, неопределенность измерения местоположения события, магнитуду по сейсмическому моменту события и т.д.) для идентификации индивидуальных разрывов, которые соответствуют собранному набору микросейсмических событий. Некоторые примерные вычислительные алгоритмы могут вычислять статистические свойства структуры разрыва. Статистические свойства могут включать в себя, например, ориентацию разрыва, общие направления ориентации разрыва, размер разрыва (например, длина, высота, площадь и т.д.), плотность расположения трещин гидравлического разрыва, сложность разрыва, свойства сетки трещин и т.д. Некоторые вычислительные алгоритмы учитывают неопределенность в местоположении событий посредством использования многочисленных реализаций местоположений микросейсмического события. Например, альтернативные статистические реализации, ассоциированные с методами Монте-Карло, могут использоваться для определенных распределений вероятности на сфероиде или другого типа распределения.
Обычно, алгоритмы соответствия разрыва могут работать с данными в реальном времени, пост-данными или любой подходящей комбинацией этих и других типов данных. Некоторые вычислительные алгоритмы для соответствия разрыва работают только с пост-данными. Алгоритмы, работающие с пост-данными, могут использоваться, когда любой поднабор или несколько поднаборов микросейсмических данных, подлежащих обработке, были собраны с обработки по гидравлическому разрыву пласта; такие алгоритмы могут обращаться (например, в виде начального ввода) к полному набору микросейсмических событий, подлежащих обработке. В некоторых реализациях алгоритмы соответствия разрыва могут работать с данными в реальном времени. Такие алгоритмы могут использоваться для автоматического соответствия разрыва в реальном времени во время обработки по гидравлическому разрыву пласта. Алгоритмы, работающие с данными в реальном времени, могут использоваться во время обработки по гидравлическому разрыву пласта, и такие алгоритмы могут адаптировать или динамически обновлять ранее идентифицированную модель разрыва для отражения вновь полученных микросейсмических событий. Например, если микросейсмическое событие обнаружено и собрано с месторождения обработки, алгоритм автоматического соответствия разрыва в реальном времени может отвечать на это событие динамическим идентифицированием и выделением плоскостей разрыва из уже собранных микросейсмических событий в реальном времени. Некоторые вычислительные алгоритмы для соответствия разрыва могут работать с комбинацией пост-данных и данных в реальном времени.
В некоторых случаях алгоритмы картирования разрыва выполняются с возможностью обработки состояний, которые возникают при обработке микросейсмических данных в реальном времени. Например, некоторые типы проблем или состояний могут происходить более преимущественно в контексте реального времени. В некоторых случаях методы обработки в реальном времени могут адаптироваться для учета (или уменьшения или исключения) низкой точности, которая иногда ассоциируется с разрывами, извлеченными из наборов данных, у которых не хватает достаточного количества микросейсмических событий или у которых не хватает достаточного количества микросейсмических событий в некоторых частях области. Некоторые методы обработки в реальном времени могут адаптироваться для получения данных разрыва, которые совместимы с данными разрыва, полученными от методов обработки пост-данных. Например, некоторые примерные методы обработки в реальном времени, описанные в данном документе, получали результаты, которые статистически такие же, согласно статистическому критерию для проверки гипотезы (t-тест или F-тест), в качестве результатов, полученных методами обработки пост-данных этих же данных.
В некоторых случаях методы обработки в реальном времени могут адаптироваться на быстрое (например, мгновенное, с точки зрения пользователя) предоставление идентифицированных данных разрыва пользователям. Такие разрывы могут давать возможность промысловым инженерам или операторам динамически получать геометрическую информацию о разрыве и корректировать параметры обработки по гидравлическому разрыву пласта, когда целесообразно (например, чтобы улучшить, увеличить, оптимизировать или иным образом изменить обработку). В некоторых случаях плоскости разрыва динамически извлекаются из микросейсмических данных и отображаются промысловым инженерам в реальном времени. Методы обработки в реальном времени могут проявлять быстродействие. В некоторых случаях быстродействие может быть улучшено посредством техники параллельного вычисления, техники распределенного вычисления, подходов поточной обработки, алгоритмов быстрого двоичного поиска или комбинации этих и других аппаратных и программных решений, которые способствуют операциям в реальном времени.
В некоторых реализациях техника соответствия разрыва может непосредственно представлять информацию о плоскостях разрыва, ассоциированную с трехмерными микросейсмическими событиями. Представленные плоскости разрыва могут представлять сетки трещин, которые проявляют многочисленные ориентации и активизируют сложные структуры разрыва. В некоторых случаях параметры гидравлического разрыва извлекаются из облака данных микросейсмических событий; такие параметры могут включать в себя, например, общие направления ориентации разрыва, плотность расположения трещин гидравлического разрыва и сложность разрыва. Информация о параметрах разрыва может представляться промысловым инженерам или операторам, например, в табличном, числовом или графическом интерфейсе или интерфейсе, который объединяет табличные, числовые и графические элементы. Графический интерфейс может представляться в реальном времени и может проявлять динамику в реальном времени гидравлических разрывов. В некоторых случаях это может помогать промысловым инженерам анализировать сложность разрыва, сетку трещин и геометрию коллектора, или это может помогать им лучше понимать процесс гидравлического разрыва в его развитии.
В некоторых реализациях значения достоверности точности используются для количественной оценки определенности плоскостей разрыва, полученных из микросейсмических данных. Значения достоверности точности могут использоваться для классифицирования разрывов на уровни достоверности. Например, три уровня достоверности (низкий уровень достоверности, средний уровень достоверности и высокий уровень достоверности) являются надлежащими для некоторых контекстов, тогда как в других контекстах другое количество (например, два, четыре, пять и т.д.) уровней достоверности может быть подходящим. Значение достоверности точности плоскости разрыва может вычисляться на основе любых подходящих данных. В некоторых реализациях значение достоверности точности плоскости разрыва вычисляется на основе местоположений микросейсмических событий и неопределенностей положения, магнитуды по сейсмическому моменту индивидуальных микросейсмических событий, расстояний между индивидуальными событиями и их поддерживающей плоскости разрыва, количества поддерживающих событий, ассоциированных с плоскостью разрыва, и весового коэффициента варианта ориентации разрыва, среди прочего.
Значения достоверности точности могут вычисляться, и плоскости разрыва могут классифицироваться в любое подходящее время. В некоторых случаях значения достоверности точности вычисляются и плоскости разрыва классифицируются в реальном времени во время обработки по гидравлическому разрыву пласта. Плоскости разрыва могут представляться пользователю в любое подходящее время и в любом подходящем формате. В некоторых случаях плоскости разрыва представляются графически в пользовательском интерфейсе в реальном времени в соответствии со значениями достоверности точности, в соответствии с уровнями достоверности точности или в соответствии с любым другим типом классификации. В некоторых случаях пользователи могут выбирать индивидуальные группы или индивидуальные плоскости (например, те, которые с высокими уровнями достоверности) для просмотра или анализа. Плоскости разрыва могут представляться пользователю в алгебраическом формате, числовом формате, графическом формате или в комбинации этих и других форматов.
В некоторых реализациях выполняется мониторинг микросейсмических событий в реальном времени во время обработки по гидравлическому разрыву пласта. Когда выполняется мониторинг событий, они также могут обрабатываться в реальном времени, они могут обрабатываться позже в виде пост-данных, или они могут обрабатываться с использованием комбинации реального времени и обработки пост-данных. События могут обрабатываться посредством любого подходящего метода. В некоторых случаях события обрабатываются индивидуально, в момент времени и в порядке, в котором они принимаются. Например, состояние системы S(M, N-1) может использоваться для представления M количества плоскостей, сгенерированных из N-1 предыдущих событий. Новое поступающее N-ое событие может запускать системное S(M, N-1). В некоторых случаях при приеме N-ого события генерируется гистограмма или распределение диапазонов ориентации. Например, гистограмма распределения вероятности или гистограмма преобразования Хафа вырожденных плоскостей в области простирания и угла наклона могут генерироваться для идентификации возможных преобладающих ориентаций, внедренных в наборы разрывов.
Базовая плоскость может генерироваться из поднабора микросейсмических событий. Например, любые три неколлинеарные точки в пространстве математически определяют базовую плоскость. Базовая плоскость, определенная тремя неколлинеарными микросейсмическими событиями, может быть представлена нормальным вектором (a, b, c). Нормальный вектор (a, b, c) может вычисляться на основе положений трех событий. Ориентация базовой плоскости может вычисляться из нормального вектора. Например, наклон θ и простирание φ могут определяться посредством

Угол θ наклона плоскости разрыва может представлять угол между плоскостью разрыва и горизонтальной плоскостью (например, плоскостью xy). Угол φ простирания плоскости разрыва может представлять угол между горизонтальной опорной осью (например, осью x) и горизонтальной линией, где плоскость разрыва пересекает горизонтальную плоскость. Например, угол простирания может определяться относительно Севера или другого горизонтального опорного направления. Плоскость разрыва может определяться другими параметрами, включая угловые параметры кроме угла простирания и угла наклона.
Обычно, N событий могут поддерживать P базовых плоскостей, где P=N(N-1)(N-2)/6, углы простирания и наклона. Гистограмма вероятности может быть построена из углов ориентации. Гистограмма вероятности или улучшенная гистограмма преобразования Хафа может иметь любую подходящую конфигурацию. Например, конфигурация гистограммы может основываться на фиксированном размере столбика гистограммы и фиксированном количестве столбиков гистограммы, естественном оптимальном размере столбика гистограммы в области угла простирания и наклона, или других типах столбиков гистограммы. Гистограмма может основываться на любом подходящем количестве микросейсмических событий (например, десятки, сотни, тысячи и т.д.) и на любом подходящем диапазоне ориентаций. В некоторых случаях для гистограммы определяются многочисленные дискретные столбики гистограммы, и каждый столбик гистограммы представляет дискретный диапазон ориентаций. Количество базовых плоскостей в каждом дискретном диапазоне может вычисляться из базовых плоскостей. В некоторых случаях каждая ориентация базовой плоскости подпадает под диапазон ориентации, ассоциированный с одним из столбиков гистограммы. Например, для N микросейсмических событий каждой P базовой плоскости может быть назначен столбик гистограммы, и может быть вычислено количество базовых плоскостей, назначенных каждому столбику гистограммы. Количеством, вычисленным для каждого столбика гистограммы, может быть любое подходящее значение. Например, количеством может быть ненормализованное число базовых плоскостей, количеством может быть нормализованная вероятность, частота, или часть базовых плоскостей, или количеством может быть другой тип значения, который является подходящим для гистограммы. Гистограмма может генерироваться для представления количества базовых плоскостей, назначенных всем столбикам гистограммы, или представления количества базовых плоскостей, назначенных поднабору столбиков гистограммы. Примерные методы для генерирования, обновления и использования гистограмм, основанных на микросейсмических данных, описаны в предварительной заявке США № 61/710 582, поданной 5 октября 2012 г.
В некоторых примерах гистограмма представляется в виде трехмерной столбчатой диаграммы, трехмерной карты поверхности или другого подходящего графика в соответствующей системе координат. Пики на гистограмме могут указывать преобладающие ориентации разрыва. Например, вдоль одной оси гистограмма может представлять углы простирания от 0° до 360° (или другой диапазон), и углы простирания могут быть разделены на любое подходящее количество столбиков гистограммы; вдоль другой оси гистограмма может представлять углы наклона от 60° до 90° (или другого диапазона), и углы наклона могут быть разделены на любое подходящее количество столбиков гистограммы. Величина (например, вероятность) для каждого столбика гистограммы может представляться вдоль третьей оси на гистограмме. Результирующий график может проявлять локальные максимумы (пики). Каждый локальный максимум (пик) может указывать соответствующий угол простирания и угол наклона, который представляет преобладающую ориентацию разрыва. Например, локальный максимум гистограммы может указывать, что больше базовых плоскостей выровнено вдоль этого направления (или диапазона направлений), чем вдоль соседних направлений, и эти базовые плоскости или уплотненно параллельны или, по существу, в одной плоскости.
Диапазон ориентации, представленный каждым столбиком гистограммы на гистограмме, может определяться любым подходящим методом. В некоторых случаях каждый столбик гистограммы представляет заданный диапазон ориентаций. Например, может использоваться способ фиксированного размера столбиков гистограммы. В некоторых случаях диапазон или размер для каждого столбика гистограммы вычисляется на основе данных, подлежащих представлению гистограммой. Например, может использоваться способ естественного оптимального размера столбиков гистограммы. В некоторых случаях ориентации базовой плоскости сортируются, и идентифицируются кластеры отсортированных ориентаций. Например, все простирания могут сортироваться в порядке убывания или возрастания и затем группироваться в кластеры; аналогично, все значения наклона могут сортироваться в порядке убывания или возрастания и затем группироваться в кластеры. Кластеры могут ассоциироваться с двумерной сеткой, и может подсчитываться количество базовых плоскостей в каждой ячейке сетки. В некоторых случаях этот метод может создавать адаптивные и динамические кластеры, приводя к весьма точным значениям для преобладающих ориентаций. Этот метод и связанные с ним уточнения могут быть реализованы с N3log(N) вычислительной сложностью. В некоторых случаях размеры столбиков гистограммы как для простирания, так и для наклона являются фиксированными, и каждая ячейка сетки местоположения базовой плоскости может явно определяться посредством ассоциированного простирания и наклона с N3 вычислительной сложностью.
Плоскости разрыва, ассоциированные с набором микросейсмических событий, могут извлекаться из преобладающих ориентаций, внедренных в данные гистограммы. Базовые плоскости, которые поддерживают преобладающую ориентацию (θ, φ), могут быть или почти параллельны, или на одной и той же плоскости. Базовые плоскости, расположенные в одной и той же плоскости, могут объединяться вместе, формируя новую плоскость разрыва с более сильной поддержкой (например, представляя большее количество микросейсмических событий). Любой подходящий метод может использоваться для объединения плоскостей разрыва. В некоторых случаях для каждой преобладающей ориентации (θ, φ) строится нормальный к плоскости вектор с составляющими (sinθ cosφ, sinθ sinφ, cosθ). В некоторых случаях результаты являются нечувствительными к местоположению плоскости, и, без потери общности, плоскость может быть построена из этого нормального вектора (например, предполагая, что начало находится в плоскости). Плоскость может описываться следующим образом x sinθ cosφ+y sinθ sinφ+z cosθ=0. Нормальное расстояние со знаком каждого события (x0, y0, z0) от базовой плоскости до построенной плоскости может быть представлено как d=-(x0 sinθ cosφ+y0 sinθ sinφ+x0 cosθ). В данном представлении события с противоположными знаками d располагаются на противоположных сторонах плоскости.
В некоторых случаях микросейсмические события группируются в кластеры на основе их расстояния от построенных плоскостей разрыва. Например, кластер событий может содержать группу событий, ближайших к построенной плоскости разрыва. По существу, каждый кластер микросейсмических событий может поддерживать конкретную плоскость разрыва. Размер кластера ссылается на количество событий, которое содержит кластер. В некоторых случаях пользовательский ввод или другие программные данные могут обозначать минимальное количество событий в поддерживаемом кластере. Минимальный размер кластера может зависеть от количества микросейсмических событий в данных. В некоторых случаях минимальный размер кластера должен быть больше или равен трем. Например, кластеры, имеющие размер, больший или равный минимальному размеру кластера, могут рассматриваться законными плоскостями разрыва. Алгоритм подбора может применяться к местоположению и значениям неопределенности местоположения для событий в каждом кластере для нахождения их соответствующей плоскости разрыва.
Любой подходящий метод может использоваться для определения плоскости разрыва из набора микросейсмических событий. В некоторых случаях используется способ подбора методом хи-квадрат. При данных K наблюдаемых микросейсмических событиях местоположения могут быть представлены (xi, yi, zi), и их неопределенности измерений могут быть представлены (σi,x, σi,y, σi,z), где 1≤i≤K. Параметры модели плоскости z=ax+by+c могут быть вычислены, например, посредством минимизирования оценочной функции распределения хи-квадрат

Оценочная функция распределения хи-квадрат может быть решена любым подходящим методом. В некоторых случаях решение может быть получено посредством решения трех уравнений, которые являются частичными производными χ2(a, b, c) в отношении ее переменных, где каждую частную производную принудительно задают равной нулю. В некоторых случаях нет аналитического решения для этой нелинейной математической системы уравнений. Численные методы (например, численный метод Ньютона, метод Ньютона-Рафсона, метод сопряженных градиентов или другой метод) могут применяться для решения относительно параметров a, b и c, и углы простирания и наклона могут вычисляться (например, используя уравнение (1) выше). Ориентация преобладающей плоскости разрыва, вычисленной из микросейсмических событий, может быть такой же, или она может быть незначительно отличаться от преобладающей ориентации разрыва, определенной из гистограммы.
В некоторых реализациях алгоритм производит итерацию по всем возможным преобладающим ориентациям для расширения всех возможных плоскостей разрыва. В некоторых случаях алгоритм производит итерацию по выбранному поднабору возможных преобладающих ориентаций. Итерации могут сходиться в плоскости. Некоторые плоскости могут быть точно равны друг другу, и некоторые могут быть близки друг к другу. Две плоскости могут рассматриваться «близкими» друг к другу, например, когда среднее расстояние событий одной плоскости от другой плоскости меньше данного порога. Пороговое расстояние может обозначаться, например, как параметр управления. Алгоритм может объединять близкие плоскости вместе, и события поддержки одной плоскости могут ассоциироваться с событиями поддержки другой объединенной плоскости(-ей).
В некоторых случаях налагаются ограничения на плоскости разрыва, идентифицированные из микросейсмических данных. Например, в некоторых случаях невязка расстояния событий должна быть меньше данного расстояния допустимого отклонения. Расстояние допустимого отклонения может указываться, например, как параметр управления. В некоторых случаях идентифицированные плоскости разрыва должны быть усечены надлежащим образом для представления конечного размера разрывов. Граница усеченных плоскостей может вычисляться из положения событий поддержки и неопределенности измерения местоположения событий. Новые плоскости разрыва конечного размера могут объединяться с уже определенными разрывами.
В некоторых случаях новое поступающее N-ое микросейсмическое событие ассоциируется с плоскостями разрыва, уже идентифицированными на основе предыдущих N-1 микросейсмических событий. При ассоциировании нового события с существующим разрывом может использоваться алгоритм для обновления существующего разрыва. Например, обновление разрыва может изменить геометрию, местоположение, ориентацию разрыва или другие параметры. При выборе одной из ранее идентифицированных плоскостей разрыва может вычисляться расстояние плоскости разрыва от нового события. Если расстояние меньше или равно параметру управления расстоянием, новое событие может быть добавлено к поддерживающему набору событий для плоскости разрыва. Если расстояние больше параметра управления расстоянием, могут быть выбраны другие ранее идентифицированные плоскости разрыва (например, повторно или рекурсивно) до тех пор, пока не будет найдена плоскость в пределах порогового расстояния. После того как новое событие будет добавлено к набору поддержки для плоскости разрыва, новые значения простирания и наклона могут оцениваться и, если необходимо, могут быть повторно вычислены (например, используя способ подбора методом хи-квадрат или другой статистический или детерминированный метод) для плоскости разрыва. Обычно, повторное вычисление параметров разрыва вызывает ограниченные изменения в ориентации из-за условного управления расстоянием.
В некоторых случаях, когда новое микросейсмическое событие ассоциируется с плоскостью разрыва, один или несколько параметров (например, невязка расстояния, площадь и т.д.) могут модифицироваться или оптимизироваться. Невязка r расстояния плоскости может представлять среднее расстояние от поддерживающих событий до плоскости. Если невязка расстояния меньше данного остаточного допуска T, новое событие может сигнализироваться набору ассоциированных событий для плоскости. В некоторых случаях дополнительный процесс, посредством которого другие ассоциированные события поддерживающего набора вычитаются из списка, запускается и завершается, когда невязка r расстояния попадает в пределы данного T. Площадь плоскости разрыва может представлять размер плоскости разрыва. Эксперимент показывает, что обычно новое событие вызывает распространение плоскости разрыва по длине, рост по высоте или обои случаи. Таким образом, вычислительные процессы могут ограничиваться условием неуменьшающейся площади, посредством чего площадь новой плоскости должна становиться больше или оставаться равной площади исходной плоскости (а не сокращаться), когда новое событие добавляется к плоскости.
Ориентация плоскости разрыва может представлять угол плоскости разрыва. Например, нормальный вектор, углы простирания и наклона, или другие подходящие параметры могут использоваться для представления ориентации плоскости разрыва. Изменение ориентации плоскости разрыва (или другие изменения плоскости разрыва) могут вызывать удаление некоторых ассоциированных событий поддержки из списка ассоциированных событий в список неассоциированных событий, основываясь на их расстоянии от обновленной плоскости разрыва. Дополнительно или альтернативно, изменение ориентации плоскости разрыва может вызывать назначение некоторых ранее неассоциированных событий плоскости разрыва, основываясь на их близости обновленной плоскости разрыва. Дополнительно, некоторые события, ассоциированные с близлежащими плоскостями, также могут ассоциироваться с текущей плоскостью. Если новое событие ассоциируется с двумя плоскостями разрыва, плоскости разрыва могут пересекаться друг с другом. В некоторых случаях пересекающиеся плоскости могут объединяться. Если новое событие не принадлежит никакой существующей плоскости разрыва, оно может быть назначено в список «неассоциированных событий».
Накопленные N микросейсмических событий могут рассматриваться в любой момент поднабором набора событий окончательных пост-данных. В таких случаях гистограмма или распределение ориентаций на основе первых N событий может быть отличной от гистограммы или распределения ориентаций, построенных из окончательных пост-данных. Некоторые плоскости разрыва, полученные из N микросейсмических событий, могут быть неточными, и эта неточность может уменьшаться по мере увеличения времени и накопления большего количества событий. В качестве примера, точность и достоверность могут быть ниже в начальный момент времени, когда обнаруженные плоскости разрыва ассоциируются с микросейсмическими событиями, расположенными близко к стволу скважины. Такие данные могут указывать плоскости разрыва, которые почти параллельны стволу скважины, даже если эти плоскости не представляют реальные разрывы.
Достоверность точности разрыва может использоваться в качестве меры для определенности, ассоциированной с плоскостями разрыва, идентифицированными из микросейсмических данных. В некоторых случаях достоверность точности идентифицируется в реальном времени во время обработки по гидравлическому разрыву пласта. Достоверность точности может определяться из любых подходящих данных, используя любые подходящие вычисления. В некоторых случаях на значение достоверности точности для плоскости разрыва оказывает влияние количество микросейсмических событий, ассоциированных с плоскостью разрыва. Например, значение достоверности точности может масштабироваться (например, линейно, нелинейно, экспоненциально, полиномиально и т.д.) с количеством микросейсмических событий в соответствии с функцией. Количество микросейсмических событий, ассоциированных с плоскостью разрыва, может встраиваться (например, как весовой коэффициент, показатель степени и т.д.) в уравнение для вычисления достоверности точности. В некоторых случаях плоскость разрыва имеет более высокое значение достоверности, когда плоскость разрыва поддерживается большим количеством точек микросейсмических данных (или меньшее значение достоверности, когда плоскость разрыва поддерживается меньшим количеством точек микросейсмических данных).
В некоторых случаях на значение достоверности точности для плоскости разрыва оказывает влияние неопределенность местоположения для микросейсмических событий, ассоциированных с плоскостью разрыва. Например, значение достоверности точности может масштабироваться (например, линейно, нелинейно, экспоненциально, полиномиально и т.д.) с неопределенностью местоположения микросейсмического события в соответствии с функцией. Неопределенность местоположения микросейсмического события может встраиваться (например, в виде весового коэффициента, показателя степени или любой спадающей функции расстояния и т.д.) в уравнение для вычисления достоверности точности. В некоторых случаях плоскость разрыва имеет более высокое значение достоверности, когда плоскость разрыва поддерживается точками микросейсмических данных, имеющих меньшую неопределенность (или меньшее значение достоверности, когда плоскость разрыва поддерживается точками микросейсмических данных, имеющих более высокую неопределенность).
В некоторых случаях на значение достоверности точности для плоскости разрыва оказывает влияние магнитуда по сейсмическому моменту для микросейсмических событий, ассоциированных с плоскостью разрыва. Например, значение достоверности точности может масштабироваться (например, линейно, нелинейно, экспоненциально, полиномиально и т.д.) с магнитудой по сейсмическому моменту микросейсмического события в соответствии с функцией. Магнитуда по сейсмическому моменту микросейсмического события может встраиваться (например, в виде весового коэффициента, показателя степени и т.д.) в уравнение для вычисления достоверности точности. Магнитуда по сейсмическому моменту для микросейсмического события может ссылаться на энергию или интенсивность (иногда пропорциональную квадрату амплитуды) события. Например, магнитуда по сейсмическому моменту для микросейсмического события может представлять собой значение по логарифмической шкале энергии или интенсивности, или другой тип значения, представляющего интенсивность энергии. В некоторых случаях плоскость разрыва имеет более высокое значение достоверности, когда плоскость разрыва поддерживается точками микросейсмических данных, имеющих более высокую интенсивность (или меньшее значение достоверности, когда плоскость разрыва поддерживается точками микросейсмических данных, имеющих меньшую интенсивность).
В некоторых случаях на значение достоверности точности для плоскости разрыва оказывает влияние расстояние между плоскостью разрыва и микросейсмическими событиями, ассоциированными с плоскостью разрыва. Например, значение достоверности точности может масштабироваться (например, линейно, нелинейно, экспоненциально, полиномиально и т.д.) со средним расстоянием между плоскостью разрыва и микросейсмическими событиями, поддерживающими плоскость разрыва. Среднее расстояние может встраиваться (например, в виде весового коэффициента, показателя степени и т.д.) в уравнение для вычисления достоверности точности. В некоторых случаях плоскость разрыва имеет более высокое значение достоверности, когда плоскость разрыва поддерживается точками микросейсмических данных, которые, в среднем, находятся ближе к плоскости разрыва (или меньшее значение достоверности, когда плоскость разрыва поддерживается точками микросейсмических данных, которые, в среднем, находятся дальше от плоскости разрыва).
В некоторых случаях на значение достоверности точности для плоскости разрыва оказывает влияние ориентация плоскости разрыва в отношении общего направления преобладающей ориентации в наборе микросейсмических данных. Например, значение достоверности точности может масштабироваться (например, линейно, нелинейно, экспоненциально, полиномиально и т.д.) с угловой разностью между ориентацией плоскости разрыва и общим направлением преобладающей ориентации в микросейсмических данных. Углы ориентации могут включать в себя простирание, наклон или любую относящуюся комбинацию (например, трехмерный пространственный угол). Ориентация может встраиваться (например, в виде весового коэффициента, показателя степени и т.д.) в уравнение для вычисления достоверности точности. Набор микросейсмических данных может иметь одно общее направление преобладающей ориентации, или он может иметь многочисленные общие направления преобладающей ориентации. Общие направления преобладающей ориентации могут классифицироваться, например, как первичные, вторичные и т.д. В некоторых случаях плоскость разрыва имеет более высокое значение достоверности, когда плоскость разрыва выровнена с общим направлением преобладающей ориентации в наборе микросейсмических данных (или меньшее значение достоверности, когда плоскость разрыва выводится из общего направления преобладающей ориентации в наборе микросейсмических данных).
Весовое значение, называемое «весовой коэффициент варианта ориентации разрыва», может представлять угловую разность между ориентацией плоскости разрыва и общим направлением преобладающей ориентации в микросейсмических данных. Весовой коэффициент варианта ориентации разрыва может представлять собой скалярное значение, которое максимально, когда плоскость разрыва выровнена с общим направлением преобладающей ориентации. Весовой коэффициент варианта ориентации разрыва может быть минимальным для ориентаций разрыва, которые максимально отделены от общего направления преобладающей ориентации разрыва. Например, когда имеется единственное общее направление преобладающей ориентации разрыва, весовой коэффициент варианта ориентации разрыва может быть равен нулю для разрывов, которые перпендикулярны (или нормальны) преобладающей ориентации разрыва. В качестве другого примера, когда имеются многочисленные общие направления преобладающей ориентации разрыва, весовой коэффициент варианта ориентации разрыва может быть равен нулю для разрывов, имеющих ориентацию между преобладающими ориентациями разрыва. Весовой коэффициент варианта ориентации разрыва может представлять собой отношение ориентации вычисленной плоскости и ориентации, отраженной однородной моделью.
В некоторых случаях, когда существует многочисленные общие направления преобладающей ориентации разрыва, весовой коэффициент варианта ориентации разрыва имеет одинаковое максимальное значение для каждого общего направления преобладающей ориентации разрыва. В некоторых случаях, когда имеется многочисленные преобладающие ориентации разрыва, весовой коэффициент варианта ориентации разрыва имеет другое локальное максимальное значение для каждой преобладающей ориентации разрыва. Например, весовой коэффициент варианта ориентации разрыва может быть равен 1,0 для разрывов, которые параллельны первому общему направлению преобладающей ориентации разрыва, 0,8 для разрывов, которые параллельны второму общему направлению преобладающей ориентации разрыва, и 0,7 для разрывов, которые параллельны третьему общему направлению преобладающей ориентации разрыва. Весовой коэффициент варианта ориентации разрыва может уменьшаться до локальных минимумов между общим направлением преобладающих ориентаций разрыва. Например, весовой коэффициент варианта ориентации разрыва между каждой соседней парой преобладающих ориентаций разрыва может определять локальный минимум на полпути между преобладающими ориентациями разрыва или в другой точке между преобладающими ориентациями разрыва.
На параметр достоверности точности может оказывать влияние неопределенность местоположения поддерживающих микросейсмических событий, магнитуда по сейсмическому моменту поддерживающих микросейсмических событий, расстояние между поддерживающими микросейсмическими событиями и плоскостью разрыва, количество поддерживающих событий, ассоциированных с плоскостью, весовой коэффициент варианта ориентации разрыва, другие значения, или любая подходящая комбинация из одного или нескольких из них. В некоторых общих моделях, достоверность повышается, когда увеличивается магнитуда по сейсмическому моменту, и, когда вариант ориентации разрыва становится больше, и количество поддерживающих событий больше, и их точность в их местоположении больше, и когда вариант весового коэффициента как функции расстояния больше. Эти факторы могут использоваться в качестве вводов для определения весового коэффициента в уравнении для достоверности точности. Например, в некоторых моделях весовые коэффициенты являются линейными или нелинейными функциями этих факторов, и весовой коэффициент варианта ориентации разрыва может появляться с более высоким весовом коэффициентом при влиянии на достоверность плоскости. В некоторых примерах достоверность точности вычисляется как:
Достоверность = (весовой коэффициент варианта ориентации разрыва)*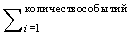 ((весовой коэффициент неопределенности местоположения)*(весовой коэффициент магнитуды по сейсмическому моменту)*(весовой коэффициент варианта расстояния)) (3)
((весовой коэффициент неопределенности местоположения)*(весовой коэффициент магнитуды по сейсмическому моменту)*(весовой коэффициент варианта расстояния)) (3)
Другие уравнения или алгоритмы могут использоваться для вычисления достоверности.
Идентифицированные плоскости разрыва могут классифицироваться на уровни достоверности, основанные на значениях достоверности точности плоскостей разрыва. В некоторых случаях используется три уровня: низкий уровень достоверности, средний уровень достоверности и высокий уровень достоверности. Может использоваться любое подходящее количество уровней достоверности. В некоторых примерах, когда новое событие добавляется к поддерживающему набору, ассоциированному с существующей плоскостью разрыва, ее ассоциированный параметр достоверности разрыва может увеличиваться, что может вызывать перенос плоскости разрыва с ее текущего уровня достоверности на более высокий, если он существует. В качестве другого примера, если ориентация разрыва отклоняется от общих направлений ориентации, проявляемых пост-данными микросейсмического события, когда постепенно накапливаются микросейсмические события, может вызываться уменьшение достоверности разрыва, главным образом, весовым коэффициентом варианта ориентации разрыва, вызывая уменьшение плоскостью ее уровня до меньшего уровня достоверности, если он существует. Оно может особенно применяться к разрывам, созданным в начальный момент времени обработки по гидравлическому разрыву пласта; оно также может применяться к другим типам разрывов в других контекстах.
Пользователям (например, промысловым инженерам, инженерам-эксплуатационникам или аналитикам и другим) может предоставляться графическое отображение плоскостей разрыва, идентифицированных из микросейсмических данных. В некоторых случаях графическое отображение позволяют пользователям визуализировать идентифицированные плоскости в реальном времени, на графических панелях, представляющих уровни достоверности. Например, три графические панели могут использоваться для отдельного представления плоскостей разрыва с низким уровнем достоверности, средним уровнем достоверности и высоким уровнем достоверности. В некоторых случаях плоскости разрыва с низким уровнем достоверности создаются в начальные моменты времени обработки по гидравлическому разрыву пласта. В некоторых случаях плоскости разрыва с высоким уровнем достоверности распространяются во времени в направлении, почти перпендикулярном стволу скважины. Так как новые микросейсмические события постепенно накапливаются во времени, графическое отображение может обновляться, позволяя пользователям динамически наблюдать ассоциирование плоскостей разрыва среди уровней достоверности, ассоциированных с графическими панелями.
Группы уровней достоверности могут быть представлены как графики плоскостей разрыва, или группы уровней достоверности могут быть представлены в другом формате. Группы уровней достоверности могут быть представлены алгебраически, например, посредством изображения алгебраических параметров (например, параметров для уравнения плоскости) плоскостей разрыва в каждой группе. Группы уровней достоверности могут быть представлены численно, например, посредством изображения числовых параметров (например, простирание, наклон, площадь и т.д.) плоскостей разрыва в каждой группе. Группы уровней достоверности могут быть представлены в табличной форме, например, посредством представления таблицы алгебраических параметров или числовых параметров плоскостей разрыва в каждой группе. Кроме того, плоскость разрыва может быть представлена графически в трехмерном пространстве, двухмерном пространстве или в другом пространстве. Например, плоскость разрыва может быть представлена в системе прямолинейных координат (например, координаты x, y, z), в системе полярных координат (например, координаты r, θ, φ) или в другой системе координат. В некоторых примерах плоскость разрыва может быть представлена как линия пересечения плоскости разрыва с другой плоскостью (например, линия в плоскости xy, линия в плоскости xz, линия в плоскости yz, или линия в любой произвольной плоскости или поверхности).
В некоторых случаях графическое отображение позволяет пользователям отслеживать и визуализировать пространственное и временное развитие конкретных плоскостей разрыва, включая их генерирование, распространение и рост. Например, пользователь может наблюдать этапы пространственного и временного развития конкретной плоскости разрыва, такие как, например, начальное идентифицирование плоскости разрыва, основываясь на трех микросейсмических событиях, новое событие, которое меняет ориентацию плоскости, новое событие, которое вызывает рост площади плоскости (например, вертикально, горизонтально или в обоих направлениях), или другие этапы в развитии плоскости разрыва. Пространственное и временное развитие плоскостей разрыва может представлять траектории перемещения возбужденных текучих сред и расклинивающих наполнителей, нагнетаемые в матрицу породы. Визуализация динамики плоскостей разрыва может помогать пользователям лучше понимать процесс гидравлического разрыва пласта, более точно анализировать сложность разрыва, оценивать эффективность гидравлического разрыва пласта или улучшать работу скважины.
Хотя данная заявка описывает примеры, включающие в себя данные микросейсмических событий, методы и системы, описанные в данной заявке, могут быть применены к другим типам данных. Например, методы и системы, описанные в данном документе, могут использоваться для обработки наборов данных, которые включают в себя элементы данных, которые не связаны с микросейсмическими событиями, которые могут включать в себя другие типа физических данных, ассоциированных с подземной зоной. В некоторых аспектах данная заявка обеспечивает структуру для обработки больших объемов данных, и структура может адаптироваться для различных применений, которые не описаны конкретно в данном документе. Например, методы и системы, описанные в данном документе, могут использоваться для анализа пространственных координат, данных ориентации или других типов информации, собранных от любого источника. В качестве примера, образцы грунта или горной породы могут быть собраны (например, во время бурения), и может определяться концентрация данной смеси (например, некоторая «соль») как функция местоположения. Это может помочь геофизикам и операторам оценить слой в геологическом разрезе в земле.
Фиг.1A изображает схематическое представление примерной скважинной системы 100 с вычислительной подсистемой 110. Примерная скважинная система 100 включает в себя рабочую скважину 102 и наблюдательную скважину 104. Наблюдательная скважина 104 может располагаться удаленно от рабочей скважины 102, около рабочей скважины 102 или в любом подходящем расположении. Скважинная система 100 может включать в себя одну или несколько дополнительных рабочих скважин, наблюдательных скважин или скважин других типов. Вычислительная подсистема 110 может включать в себя одно или несколько вычислительных устройств или систем, расположенных на рабочей скважине 102, на наблюдательной скважине 104 или в других расположениях. Вычислительная подсистема 110 или любой из ее компонентов может располагаться отдельно от других компонентов, показанных на фиг.1A. Например, вычислительная подсистема 110 может располагаться в центре обработки данных, вычислительной установке или в другом подходящем расположении. Скважинная система 100 может включать в себя дополнительные или другие признаки, и признаки скважинной системы могут быть размещены так, как показано на фиг.1A, или в любой другой подходящей конфигурации.
Примерная рабочая скважина 102 включает в себя ствол 101 скважины в подземной зоне 121 под поверхностью 106. Подземная зона 121 может включать в себя одну или менее одной горной породы, или подземная зона 121 может включать в себя более одной горной породы. В примере, показанном на фиг.1A, подземная зона 121 включает в себя многочисленные подповерхностные слои 122. Подповерхностные слои 122 могут определяться геологическими или другими свойствами подземной зоны 121. Например, каждый подповерхностный слой 122 может соответствовать конкретной литологии, конкретному фазовому составу, конкретному профилю напряжений или давления, или любой другой подходящей характеристики. В некоторых случаях одним или несколькими подповерхностными слоями 122 может быть коллектор текучей среды, который содержит гидрокарбонаты или другие типы текучих сред. Подземная зона 121 может включать в себя любую подходящую горную породу. Например, один или несколько подповерхностных слоев 122 могут включать в себя песчаник, карбонатные материалы, сланец, каменный уголь, аргиллит, гранит или другие материалы.
Примерная рабочая скважина 102 включает в себя подсистему 120 обработки нагнетанием, которая включает в себя автомашину 116 с приборами и инструментами, автомобильную насосную установку 114 и другое оборудование. Подсистема 120 обработки нагнетанием может применять обработку нагнетанием в подземную зону 121 через ствол 101 скважины. Обработка нагнетанием может представлять собой обработку разрыва, которая создает искусственную трещиноватость в подземной зоне 121. Например, обработка нагнетанием может инициировать, распространять или открывать трещины в одном или нескольких подповерхностных слоях 122. Обработка разрыва может включать в себя обработку по гидравлическому миниразрыву пласта, обработку по обычному или полному гидравлическому разрыву пласта, обработку по последующему гидравлическому разрыву пласта, обработку по повторному гидравлическому разрыву пласта, обработку по окончательному гидравлическому разрыву пласта или другой тип обработки по гидравлическому разрыву пласта.
Обработка по гидравлическому разрыву пласта может нагнетать текучую среду для обработки приствольной зоны в подземную зону 121 с любыми подходящими давлениями текучей среды и расходами текучей среды. Текучие среды могут нагнетаться с давлением выше, равным или ниже давления инициирования разрыва, выше, равным или ниже смыкания разрыва или при любой подходящей комбинации этих и других давлений текучей среды. Давление инициирования разрыва для породы представляет собой минимальное давления нагнетания текучей среды, которое может инициировать или распространять искусственные разрывы в породе. Применение обработки по гидравлическому разрыву пласта может инициировать или распространять или может не инициировать или распространять искусственные разрывы в породе. Давление смыкания разрыва для породы представляет собой минимальное давление нагнетания текучей среды, которое может расширять существующие разрывы в подземной породе. Приложение обработки по гидравлическому разрыву пласта может расширять или может не расширять естественные или искусственные разрывы в породе.
Обработка по гидравлическому разрыву пласта может применяться посредством любой подходящей системы, используя любой подходящий метод. Автомобильные насосные установки 114 могут включать в себя мобильные транспортные средства, неподвижные установки, тормозные башмаки, шланги, трубы, цистерны или резервуары текучей среды, насосы, задвижки или другие подходящие конструкции и оборудование. В некоторых случаях автомобильные насосные установки 114 соединяются с рабочей колонной, расположенной в стволе 101 скважины. Во время работы автомобильные насосные установки 114 могут накачивать текучую среду через рабочую колонну и в подземную зону 121. Накачиваемая текучая среда может включать в себя жидкость разрыва, расклинивающие наполнители, промывочную жидкость, присадки или другие материалы.
Обработка по гидравлическому разрыву пласта может применяться в единственном расположении нагнетания текучей среды или в многочисленных расположениях нагнетания текучей среды в подземной зоне, и текучая среда может нагнетаться в течение единственного периода времени или в течение многочисленных разных периодов времени. В некоторых случаях обработка по гидравлическому разрыву пласта может использовать многочисленные разные расположения нагнетания текучей среды в единственный ствол скважины, многочисленные расположения нагнетания текучей среды в многочисленные разные стволы скважины или любые подходящие комбинации. Кроме того, обработка по гидравлическому разрыву пласта может нагнетать текучую среду через любой подходящий тип ствола скважины, такой как, например, вертикальные стволы скважины, наклонные стволы скважины, горизонтальные стволы скважины, изогнутые стволы скважины или любую подходящую комбинацию этих и других.
Обработка по гидравлическому разрыву пласта может управляться любой подходящей системой, используя любой подходящий метод. Автомашины 116 с приборами и инструментами могут включать в себя мобильные транспортные средства, неподвижные установки или другие подходящие конструкции. Автомобили 116 с приборами и инструментами могут включать в себя систему управления нагнетанием, которая выполняет мониторинг и управляет обработкой по гидравлическому разрыву пласта, применяемой подсистемой 120 обработки по нагнетанию. В некоторых реализациях система управления нагнетанием может выполнять связь с другим оборудованием для выполнения мониторинга и управления обработкой по нагнетанию. Например, автомобили 116 с приборами и инструментами могут выполнять связь с автомобильной насосной установкой 114, подповерхностными инструментами и оборудованием для мониторинга.
Обработка по гидравлическому разрыву пласта, а также другая деятельность и явления природы, могут создавать микросейсмические события в подземной зоне 121, и микросейсмические данные могут собираться от подземной зоны 121. Например, микросейсмические данные могут собираться одним или несколькими датчиками 112, ассоциированными с наблюдательной скважиной 104, или микросейсмические данные могут собираться системами других типов. Микросейсмическая информация, обнаруженная в скважинной системе 100, может включать в себя акустические сигналы, генерируемые явлениями природы, акустические сигналы, ассоциированные с обработкой по гидравлическому разрыву пласта, применяемой посредством рабочей скважины 102, или сигналы других типов. Например, датчики 112 могут обнаруживать акустические сигналы, генерируемые скольжениями горной породы, сдвиганием горной породы, разрывами горной породы или другими событиями в подземной зоне 121. В некоторых случаях местоположения индивидуальных микросейсмических событий могут определяться на основе микросейсмических данных.
Микросейсмические события в подземной зоне 121 могут происходить, например, вдоль или около наведенных гидравлических разрывов. Микросейсмические события могут ассоциироваться с предварительно существующими естественными разрывами или плоскостями гидравлических разрывов, наведенных деятельностью по гидравлическому разрыву. В некоторых вариантах осуществления большинство обнаруживаемых микросейсмических событий ассоциируются с разрывами горной породы сдвига-скольжения. Такие события могут соответствовать или могут не соответствовать наведенным растягивающих гидравлических разрывов, которые имеют генерирование с существенной шириной. На ориентацию разрыва может оказывать влияние режим напряжения, присутствие систем разрывов, которые были сгенерированы в различные моменты времени в прошлом (например, с этой же или другой ориентацией напряжения). В некоторых вариантах осуществления более старые разрывы могут цементироваться закрытыми в течение геологического времени, и остаются в виде плоскостей ослабления в горных породах в приповерхностной зоне.
Наблюдательная скважина 104, показанная на фиг.1A, включает в себя ствол 111 скважины в подземной области под поверхностью 106. Наблюдательная скважина 104 включает в себя датчики 112 и другое оборудование, которое может использоваться для обнаружения микросейсмической информации. Датчики 112 могут включать в себя геофоны или прослушивающее оборудование других типов. Датчики 112 могут располагаться в различных положениях в скважинной системе 100. На фиг.1A датчики 112 устанавливаются на поверхности 106 и под поверхностью 106 в стволе 111 скважины. Дополнительно или альтернативно, датчики могут располагаться в других расположениях над или под поверхностью 106, в других расположениях в стволе 111 скважины или внутри другого ствола скважины. Наблюдательная скважина 104 может включать в себя дополнительное оборудование (например, рабочую колонну, пакеры, обсадную колонну или другое оборудование), не показанное на фиг.1A. В некоторых реализациях микросейсмические данные обнаруживаются датчиками, установленными в рабочей скважине 102 или на поверхности 106, без использования наблюдательной скважины.
В некоторых случаях вся или часть вычислительной подсистемы 110 может содержаться в техническом командном центре на буровой площадке, в вычислительном центре реального времени на удаленном расположении, в другом подходящем расположении или в любой подходящей их комбинации. Скважинная система 100 и вычислительная подсистема 110 могут включать в себя или могут выполнять доступ к любой подходящей инфраструктуре связи. Например, скважинная система 100 может включать в себя многочисленные отдельные линии связи или сеть соединенных между собой линий связи. Линии связи могут включать в себя проводные или беспроводные системы связи. Например, датчики 112 могут выполнять связь с автомобилями 116 с приборами и инструментами или вычислительной подсистемой 110 по проводным или беспроводным линиям связи или сетям, или автомобили 116 с приборами и инструментами могут выполнять связь с вычислительной подсистемой 110 по проводным или беспроводным линиям связи или сетям. Линии связи могут включать в себя сети передачи данных общего пользования, частные сети передачи данных, спутниковые линии связи, выделенные каналы связи, линии телесвязи или любую подходящую комбинацию этих и других линий связи.
Вычислительная подсистема 110 может анализировать микросейсмические данные, собранные в скважинной системе 100. Например, вычислительная подсистема 110 может анализировать данные микросейсмических событий обработки по гидравлическому разрыву пласта подземной зоны 121. Микросейсмические данные обработки по гидравлическому разрыву пласта могут включать в себя данные, собранные перед, во время или после нагнетания текучей среды. Вычислительная подсистема 110 может принимать микросейсмические данные в любой подходящий момент времени. В некоторых случаях вычислительная подсистема 110 принимает микросейсмические данные в реальном времени (или, по существу, в реальном времени) во время обработки по гидравлическому разрыву пласта. Например, микросейсмические данные могут посылаться на вычислительную подсистему 110 непосредственно при обнаружении датчиками 112. В некоторых случаях вычислительная подсистема 110 принимает некоторые или все микросейсмические данные после того, как будет завершена обработка по гидравлическому разрыву пласта. Вычислительная подсистема 110 может принимать микросейсмические данные в любом подходящем формате. Например, вычислительная подсистема 110 может принимать микросейсмические данные в формате, создаваемым микросейсмическими датчиками или детекторами, или вычислительная подсистема 110 может принимать микросейсмические данные после того, как микросейсмические данные будут отформатированы, упакованы или иным образом обработаны. Вычислительная подсистема 110 может принимать микросейсмические данные любым подходящим средством. Например, вычислительная подсистема 110 может принимать микросейсмические данные посредством проводной или беспроводной линии связи, проводной или беспроводной сети, или посредством одного или нескольких дисков или других материальных средств.
Вычислительная подсистема 110 может реализовать каскадные обновления, которые инициируются на основе вновь доступной информации. Например, при приеме нового микросейсмического события или другой новой информации, вычислительная система 110 может идентифицировать ранее сгенерированный элемент данных (например, плоскость разрыва), подлежащий обновлению на основе нового микросейсмического события. После обновления ранее сгенерированного элемента данных эффекты обновления этого элемента данных могут распространяться на другие ранее сгенерированные элементы данных (например, на другие плоскости разрыва). В некоторых случаях каскадные обновления могут распространяться последовательно, параллельно или другим способом, и обновления могут распространяться на дискретный поднабор ранее сгенерированных элементов данных, или на все ранее сгенерированные элементы данных. Может применяться порог, например, для завершения каскадного эффекта и предотвращения дальнейших обновлений, когда маловероятно, что эффект таких дальнейших обновлений создаст полезную информацию.
Некоторые из методов и операций, описанных в данном документе, могут быть реализованы вычислительной подсистемой, выполненной с возможностью предоставления описанной функциональной возможности. В различных вариантах осуществления вычислительное устройство может включать в себя любые из различных типов устройств, включая, но не ограничиваясь ими, персональные вычислительные системы, настольные компьютеры, переносные компьютеры, ноутбуки, универсальные вычислительные системы, карманные компьютеры, рабочие станции, планшеты, серверы приложений, запоминающие устройства или любой тип вычислительного или электронного устройства.
Фиг.1B представляет собой схему примерной вычислительной подсистемы 110 по фиг.1A. Примерная вычислительная подсистема 110 может располагаться на или около одной или нескольких скважинах скважинной системы 100 или в удаленном расположении. Вся или часть вычислительной подсистемы 110 может работать независимо от скважинной системы 100 или независимо от любого из других компонентов, показанных на фиг.1A. Примерная вычислительная подсистема 110 включает в себя процессор 160, память 150 и контроллеры 170 ввода/вывода, соединенные шиной 165 с возможностью выполнения связи. Память может включать в себя, например, оперативное запоминающее устройство (RAM), запоминающее устройство (например, записываемое постоянное запоминающее устройство (ROM) или другие), жесткий диск или другой тип носителя данных. Вычислительная подсистема 110 может предварительно программироваться, или она может программироваться (и перепрограммироваться) посредством загрузки программы с другого источника (например, с компакт-диска (CD-ROM), с другого вычислительного устройства посредством сети передачи данных или другим образом). Контроллер 170 ввода/вывода соединен с устройствами ввода/вывода (например, монитором 175, мышью, клавиатурой или другими устройствами ввода/вывода) и с линией 180 связи. Устройства ввода/вывода принимают и передают данные в аналоговой или цифровой форме по линиям связи, таким как последовательная линия, беспроводная линия (например, инфракрасная, радиочастотная или другие), параллельная линия или линии другого типа.
Линия 180 связи может включать в себя любой тип канала связи, соединителя, сети передачи данных или другой линии связи. Например, линия 180 связи может включать в себя беспроводную или проводную сеть, локальную сеть (LAN), глобальную сеть (WAN), частную сеть, сеть общего пользования (такую как Интернет), сеть WiFi (беспроводная преданность), сеть, которая включает в себя спутниковую линию связи, или сеть передачи данных другого типа.
Память 150 может хранить инструкции (например, компьютерный код), ассоциированные с операционной системой, компьютерными приложениями или другими ресурсами. Память 150 также может хранить данные приложений и объекты данных, которые могут интерпретироваться одним или несколькими приложениями или виртуальными машинами, выполняющимися на вычислительной подсистеме 110. Как показано на фиг.1B, примерная память 150 включает в себя микросейсмические данные 151, геологические данные 152, данные 153 разрыва, другие данные 155 и приложения 156. В некоторых реализациях память вычислительного устройства включает в себя дополнительную или другую информацию.
Микросейсмические данные 151 могут включать в себя информацию о расположениях микросейсмов в подземной зоне. Например, микросейсмические данные могут включать в себя информацию на основе акустических данных, обнаруженных в наблюдательной скважине 104, на поверхности 106, на рабочей скважине 102 или в других расположениях. Микросейсмические данные 151 могут включать в себя информацию, собранную датчиками 112. В некоторых случаях микросейсмические данные 151 объединяются с другими данными, переформатируются или иным образом обрабатываются. Данные микросейсмических событий могут включать в себя любую подходящую информацию, относящуюся к микросейсмическим событиям (местоположения, магнитуды, неопределенности, моменты времени и т.д.). Данные микросейсмических событий могут включать в себя данные, собранные от одной или нескольких обработок по гидравлическому разрыву пласта, которые могут включать в себя данные, собранные перед, во время или после нагнетания текучей среды.
Геологические данные 152 могут включать в себя информацию о геологических свойствах подземной зоны 121. Например, геологические данные 152 могут включать в себя информацию о подповерхностных слоях 122, информацию о стволах 101, 111 скважины, или информацию о других атрибутах подземной зоны 121. В некоторых случаях геологические данные 152 включают в себя информацию о литологии, фазовом составе, профиле напряжения, профиле давления, пространственной протяженности или других атрибутах одной или нескольких горных пород в подземной зоне. Геологические данные 152 могут включать в себя информацию, собранную из каротажной диаграммы, образцов горной породы, обнаженной части пласта, микросейсмического построения изображения или других источников данных.
Данные 153 разрыва могут включать в себя информацию о плоскостях разрыва в подземной зоне. Данные 153 разрыва могут идентифицировать местоположения, размеры, формы и другие свойства разрывов в модели подземной зоны. Данные 153 разрыва могут включать в себя информацию о естественной трещиноватости, гидравлических разрывах или любые другие типы неоднородности в подземной зоне 121. Данные 153 разрыва могут включать в себя плоскости разрыва, вычисленные из микросейсмических данных 151. Для каждой плоскости разрыва данные 153 разрыва могут включать в себя информацию (например, угол простирания, угол наклона и т.д.), идентифицирующую ориентацию разрыва, информацию, идентифицирующую форму (например, кривизну, апертуру и т.д.) разрыва, информацию, идентифицирующую границы разрыва, или любую другую подходящую информацию.
Приложения 156 могут включать в себя программные приложения, сценарии, программы, функции, исполняемые файлы или другие модули, которые интерпретируются или исполняются процессором 160. Такие приложения могут включать в себя машиночитаемые инструкции для выполнения одной или нескольких операций, представленных на фиг.4. Приложения 156 могут включать в себя машиночитаемые инструкции для генерирования пользовательского интерфейса или графика, такого как, например, графиков, которые представлены на фиг.2A, 2B или 3. Приложения 156 могут получать входные данные, такие как микросейсмические данные, геологические данные или другие типы входных данных, из памяти 150, от другого локального источника или от одного или нескольких удаленных источников (например, по линии 180 связи). Приложения 156 могут генерировать выходные данные и сохранять выходные данные в памяти 150, на другом локальном носителе или на одном или нескольких удаленных устройствах (например, посредством посылки выходных данных по линии 180 связи).
Процессор 160 может исполнять инструкции, например, для генерирования выходных данных, основываясь на вводе данных. Например, процессор 160 может выполнять приложения 156 посредством исполнения или интерпретирования программного обеспечения, сценариев, программ, функций, исполняемых файлов или других модулей, содержащихся в приложениях 156. Процессор 160 может выполнять одну или несколько операций, представленных на фиг.4, или генерировать один или несколько интерфейсов или графиков, показанных на фиг.2A, 2B или 3. Входные данные, принятые процессором 160, или выходные данные, сгенерированные процессором 160, могут включать в себя любые из микросейсмических данных 151, геологических данных 152, данных 153 разрыва или других данных 155.
Фиг.2 представляет собой примерную систему 200 для управления микросейсмическими данными. Примерная система 200 включает в себя измерительную систему 202, систему 204 сбора, систему 206 обработчика событий, систему 208 вычисления плоскости и хранимые данные. Хранимые данные включают в себя данные 210 событий с измененным состоянием, данные 209 неассоциированных событий, данные 212 ассоциированных событий и данные 214 плоскостей. Система для управления микросейсмическими данными может включать в себя дополнительные, меньшего количества или другие признаки, которые могут включать в себя другие типы систем, подсистем, компонентов и данных. Компоненты системы управления данными могут работать и взаимодействовать так, как описано в данном документе в отношении фиг.2, или компоненты системы управления данными могут работать и взаимодействовать другим образом.
Системные компоненты, показанные на фиг.2, могут быть реализованы в виде отдельных подсистем, или различные компоненты могут объединяться в единственную подсистему. Например, измерительная система 202 (или некоторые аспекты измерительной системы 202) может объединяться с системой 204 сбора; система 204 сбора (или некоторые аспекты системы 204 сбора) может объединяться с системой 206 обработчика событий; и т.д. В качестве другого примера, система 204 сбора, система 206 обработчика событий и система 208 вычисления плоскости могут быть реализованы в одной или нескольких вычислительных системах (например, вычислительной подсистеме 110 на фиг.1B). Следовательно, компоненты системы, показанной на фиг.2, могут располагаться вместе (например, на скважинной системе или около нее, в центре обработки данных и т.д.), или компоненты могут распределяться по многочисленным разным расположениям. Компоненты могут выполнять связь друг с другом по сети передачи данных, по линиям прямой связи (например, беспроводным или проводным линиям связи), по спутниковым соединениям или по комбинациям этих и других типов соединений.
Данные, показанные на фиг.2, могут представлять микросейсмические события, плоскости разрыва, сгенерированные из групп микросейсмических событий, и другую информацию. Данные, представляющие микросейсмическое событие (или «точку»), могут включать в себя пространственные координаты для местонахождения (например, в трехмерном пространстве) микросейсмического события, временные координаты для момента времени, при котором было обнаружено микросейсмическое событие, информацию о неопределенности (например, неопределенности местонахождения), ассоциированную с микросейсмическим событием, информацию о магнитуде по сейсмическому моменту (например, указывающую энергию или интенсивность микросейсмического события) и другую информацию. Данные, показанные на фиг.2, могут включать в себя набор точек в реальном времени, который увеличивается в размере во времени. Увеличение размера набора данных может происходить, обычно, несинхронизированным образом, означая, что новая точка данных может быть вставлена в набор данных незапланированным образом.
В некоторых реализациях примерная система 200 может оптимально обрабатывать элементы данных, когда они появляются (например, в реальном времени) во входном буфере, и вычислять оптимальные плоскости, которые встраиваются в накопленные точки данных реального времени. Примерная система 200 в некоторых случаях может находить, вычислять и выполнять мониторинг (например, в реальном времени) плоскостей разрыва, которые встраиваются в микросейсмические данные.
Измерительная система 202 может включать в себя любое аппаратное обеспечение, программное обеспечение, оборудование или другие системы, которые обнаруживают микросейсмические данные от подземной зоны. Например, измерительная система 202 может включать в себя датчики 112 и другие компоненты, ассоциированные с наблюдательной скважиной 104, показанной на фиг.1, или измерительная система 202 может включать в себя другие типы систем. Измерительная система 202 может быть выполнена с возможностью обнаружения акустических сигналов и генерирования микросейсмических данных, основанных на обнаруженных акустических сигналах. Например, измерительная система 202 может вычислять местоположение элементов трехмерных данных вместе с их точностью погрешности определения положения, основанной на акустических данных, обнаруженных одним или несколькими датчиками, установленными в подземной зоне или около нее. Микросейсмические данные от измерительной системы 202 могут подаваться на систему 204 сбора.
Система 204 сбора может включать в себя аппаратное обеспечение, программное обеспечение, оборудование или комбинацию этих или других систем, которые собирают микросейсмические данные от измерительной системы. Например, система 204 сбора может включать в себя один или несколько серверов или других типов вычислительных компонентов, которые соединены с возможностью выполнения связи (например, посредством проводных соединений, беспроводных соединений или их комбинации) с измерительной системой 202. Система 204 сбора может собирать элементы данных реального времени от измерительной системы 202 и направлять их на систему 206 обработчика событий. Например, система 204 сбора может передавать микросейсмические события на систему 206 обработчика событий посредством сохранения или регистрации их в буфере, устройстве ввода или в области ввода системы 206 обработчика событий.
Система 206 обработчика событий может управлять микросейсмическими событиями. В некоторых случаях система 206 обработчика событий управляет микросейсмическими событиями обработки по гидравлическому разрыву пласта в реальном времени. Например, система 206 обработчика событий может выполнять действие (например, активизирование системы 208 вычисления плоскостей и т.д.) на основе событий, как только они будут представлены ей. В некоторых случаях система 206 обработчика событий управляет данными, основанными на доступности элемента или точки данных в реальном времени. При управлении данными, основанными на доступности каждой точки данных в реальном времени, система 206 обработчика событий может помещать каждый элемент данных немедленно во входной буфер системы 208 вычисления плоскости для дальнейшей обработки, как только элемент данных будет собран от измерительной системы. В некоторых случаях система 206 обработчика событий задерживает обработку элемента данных в течение периода времени, например, чтобы сделать возможным накопление дополнительных данных, чтобы сделать возможным завершение существующих процессов, или по другим причинам.
Система 206 обработчика событий может определять многочисленные категории микросейсмических событий. Например, система 206 обработчика событий может сохранять данные 210 событий с измененным состоянием для указания набора микросейсмических состояний, имеющих состояние «состояние изменено»; система 206 обработчика событий может сохранять данные 209 неассоциированных событий для указания набора микросейсмических событий, имеющих «неассоциированное» состояние; и система 206 обработчика событий может сохранять данные 212 ассоциированных событий для указания набора микросейсмических событий, имеющих «ассоциированное» состояние. Могут определяться дополнительные, меньшего количества или другие разные категории микросейсмических событий.
Сохраненные данные, указывающие различные категории микросейсмических событий, могут включать в себя списки, таблицы или другие структуры данных. Для целей иллюстрации, данные 210 событий с измененным состоянием, данные 209 неассоциированных событий и данные 212 ассоциированных событий могут быть представлены таблицей.
В примере, показанном в таблице 1, три события (События A, C и D) ассоциируются с первой плоскостью разрыва (Плоскость 1), три события (События B, C и G) ассоциируются со второй плоскостью разрыва (Плоскость 2), два события (События E и F) находятся в «неассоциированной» категории, и три события (События E, H и I) находятся в категории «состояние изменено».
В некоторых случаях данные 212 ассоциированных событий ассоциируют каждое микросейсмическое событие с одной или несколькими вычисленными плоскостями разрыва, тогда как данные 210 событий с измененным состоянием и данные 209 неассоциированных событий указывают, какие микросейсмические события не ассоциированы с плоскостью разрыва. Для примера, показанного в таблице 1, данные 212 ассоциированных событий могут указывать, что События A, C и D ассоциированы с Плоскостью 1, и что События B, C и G ассоциированы с Плоскостью 2; данные 209 неассоциированных событий могут указывать, что События E и F не ассоциированы ни с какой плоскостью; и данные 210 событий с измененным состоянием могут указывать, что События E, H и I находятся в категории измененного состояния.
В некоторых случаях микросейсмическое событие может быть в единственной категории, в многочисленных категориях, или оно может ассоциироваться с единственной плоскостью разрыва или многочисленными плоскостями разрыва. События в категории «состояние изменено» могут включать в себя новые события, которые были приняты от системы 204 сбора и еще не были ассоциированы с плоскостью разрыва. События в категории «состояние изменено» также могут включать в себя другие события, которые ранее были ассоциированы с плоскостью разрыва, но стали неассоциированными, например, когда плоскость разрыва была пересчитана системой 208 вычисления плоскости. События могут добавляться в категорию «состояние изменено» в ответ на условия других типов.
В некоторых реализациях данные 210 событий с измененным состоянием указывают упорядочение точек в категории с измененным состоянием. Упорядочение может основываться на моментах времени, ассоциированных с событиями, порядке, в котором точки были добавлены в категорию с измененным состоянием, или комбинации этих и других данных. Упорядочение в некоторых случаях может определять порядок, в котором события с измененным состоянием обрабатываются системой 208 вычисления плоскости.
В некоторых аспектах работы компоненты системы 200 (например, система 206 обработчика событий, система 208 вычисления плоскости) могут работать вместе или отдельно для исполнения аспектов алгоритма ядра или базовой части системы. Например, система 200 может работать для встраивания влияния одного нового элемента данных, который представлен набору элементов данных и набору ранее вычисленных плоскостей. В некоторых случаях система 200 исполняет алгоритм ядра, который включает в себя последовательность каскадных этапов, которые автоматически запускаются другими этапами в алгоритме, внешними воздействиями или другими условиями.
В некоторых случаях система 208 вычисления плоскости может принимать индивидуальные события или кластеры событий от системы 206 обработчика событий. Система 208 вычисления плоскости в некоторых случаях может ассоциировать каждое из событий «состояние изменено» с одной из ранее сгенерированных плоскостей разрыва. Если событие не может ассоциироваться с плоскостью разрыва, тогда событие может добавляться в «неассоциированную» категорию. Если событие может ассоциироваться с плоскостью разрыва, выбранная плоскость разрыва может быть пересчитана или повторно подобрана на основе вновь ассоциированного события. В некоторых случаях все точки, которые имеют свое состояние измененным с ассоциированного (т.е. ассоциированного с конкретной плоскостью разрыва) на неассоциированное, добавляются в категорию «состояние изменено». Операции (например, попытка ассоциировать события «состояние изменено» с плоскостями разрыва, и обновление различных категорий и т.д.) могут повторяться, например, до тех пор, пока категория «состояние изменено» не будет пустой, или до тех пор, пока не будет удовлетворяться другое условие. В некоторых случаях может быть доказано, что алгоритм ядра всегда будет сходиться и иметь определенное конечное завершение.
В некоторых реализациях система 206 обработчика событий может надлежащим образом добавлять каждое новое микросейсмическое событие в категорию «состояние изменено», и система 206 обработчика событий может поддерживать и управлять событиями в категории «состояние изменено». Например, система 206 обработчика событий может быть выполнена с возможностью поддержания порядка событий «состояние изменено». Если новое событие достигает категории «состояние изменено» от операций, выполненных ниже (т.е. от системы 208 вычисления плоскостей) или выше (т.е. от измерительной системы 202), система 206 обработчика событий может размещать событие надлежащим образом в последовательности событий в категории «состояние изменено», подлежащих исполнению. В некоторых случаях наиболее вероятно, что исполняются события в головной части упорядочения «состояние изменено», и менее вероятно, что исполняются события в хвостовой части упорядочения «состояние изменено». В некоторых случаях хвостовая часть упорядочения может содержать события, которые система 206 обработчика событий решила временно не исполнять.
В некоторых случаях данные 210 событий с измененным состоянием могут включать в себя консолидированный упорядоченный список микросейсмических событий, подлежащих обработке системой 208 вычисления плоскости. Консолидированный список может включать в себя новые микросейсмические события от системы 204 сбора (которые не были обработаны системой 208 вычисления плоскости) и более старые микросейсмические события (которые были обработаны системой 208 вычисления плоскости). Например, если система 208 вычисления плоскости модифицирует существующую плоскость разрыва и вызывает то, что микросейсмическое событие становится диссоциированным от модифицированной плоскости разрыва, система 208 вычисления плоскости может посылать диссоциированное событие системе 206 обработчика событий. Система 206 обработчика событий может принимать диссоциированное событие, идентифицировать его как событие «состояние изменено» и обновлять данные 210 событий с измененным состоянием соответствующим образом. Диссоциированное событие может быть добавлено в категорию «состояние изменено» вместе с новыми микросейсмическими событиями, которые еще не были посланы на систему 208 вычисления плоскости для обработки. Система 206 обработчика событий может определять порядок для всех событий «состояние изменено» для управления порядком, в котором события подаются в систему 208 вычисления плоскости для исполнения.
В некоторых реализациях система 206 обработчика событий может посылать единственное событие в момент исполнения, или система 206 обработчика событий может посылать многочисленные события в момент исполнения. Например, когда одно или несколько микросейсмических событий посылаются для исполнения, они могут подаваться на систему 208 вычисления плоскости для встраивания в существующую систему ранее вычисленных плоскостей разрыва. В некоторых случаях система 206 обработчика событий имеет режим работы по умолчанию. Например, система 206 обработчика событий может быть выполнена с возможностью передачи системе 208 вычисления плоскости событий из категории «состояние изменено», одно за другим, отсортированными в отношении их временной отметки. Работа системы 206 обработчика событий может определять, что порядок, в котором исполняются события «состояние изменено», может сохраняться, например, методом FIFO («первым пришел - первым обслужен»), или может использоваться другая схема.
В некоторых реализациях система 206 обработчика событий может использовать алгоритм ближайшего соседа или другой алгоритм кластеризации для поддержания набора кластеров в категории «состояние изменено». Кластеры могут сортироваться в отношении временной отметки самого раннего события в кластере. Для подобных временных отметок событию выше (т.е. новому событию от измерительной системы 202) может быть присвоен приоритет над событием снизу (т.е. событию, диссоциированному системой 208 вычисления плоскости). Содержимое и количество кластеров может меняться динамически и адаптивно. После того как система 208 вычисления плоскости исполнит данный кластер, система 206 обработчика событий может посылать верхний кластер в списке системе 208 вычисления плоскости для исполнения.
В некоторых реализациях кластеры с одной точкой со старыми отметками (например, относительно некоторого порога) могут фиксироваться до тех пор, пока не будет инициирован процесс промывки. В некоторых случаях система может временно приостанавливать себя, когда имеется слишком много одноэлементных кластеров. В таких случаях, система может послать эти кластеры один за другим на исполнение индивидуально. В некоторых случаях некоторые из них становятся ассоциированными с плоскостью разрыва; в некоторых случаях некоторые из них завершаются в неассоциированной категории. Такие операции могут исполняться в любой момент времени, включая, например, между появлением новых сейсмических событий сверху. В некоторых случаях может выполняться «локальный возврат». Например, если кластер находится при исполнении системой 208 вычисления плоскости, и система 206 обработчика событий определяет, что одно или несколько новых событий сверху принадлежат исполняемому кластеру, система 200 может выполнить возврат недавних вычислений (т.е. их отмену), которые были выполнены, добавить новое событие(-ия) кластеру и повторно инициировать исполнение обновленного кластера.
Система 200 может поддерживать стабильное исполнение. Например, система 200 может быть способна получать решение для любого набора физических данных или условий данных. В некоторых случаях система 200 может исполнять и находить решение в реальном времени быстрее, чем когда решение может быть найдено в режиме работы в квазиреальном времени. В некоторых случаях система 200 может во все моменты времени и в реальном времени поддерживать хорошую аппроксимацию для временной структуры плоскостей разрыва.
В некоторых примерных реализациях система 206 обработчика событий принимает во внимание ошибку при измерении точки, и, более обобщенным образом, ее неопределенность. Например, система 206 обработчика событий может быть выполнена с возможностью перемещения события из одного кластера в другой, основываясь на неопределенности события. Система 206 обработчика событий может задавать минимальное количество событий внутри кластера. Например, минимальное количество может быть связано с минимальным количеством событий, которые поддерживают плоскость разрыва. В некоторых примерных реализациях отношение между 0,5 и 2 может предлагать довольно хорошие результаты.
Фиг.3A-3F представляют собой графики, изображающие обновления для примерной плоскости разрыва. Графики изображают примерную временную последовательность для плоскости разрыва. Фиг.3A изображает график 300a начальной плоскости 308a разрыва; каждый последующий график во временной последовательности изображает плоскость разрыва, обновленную на основе точки новых микросейсмических данных. Фиг.3B изображает график 300b первой обновленной плоскости 308b разрыва; фиг.3C изображает график 300c второй обновленной плоскости 308c разрыва; фиг.3D изображает график 300d третьей обновленной плоскости 308d разрыва; фиг.3E изображает график 300e четвертой обновленной плоскости 308e разрыва; и фиг.3F изображает график 300f пятой обновленной плоскости 308f разрыва. На каждом графике для сравнения показана предыдущая версия плоскости разрыва. Графики на фиг.3A-3F также изображают ствол 310 скважины и микросейсмические события 306.
Каждый из графиков 300a, 300b, 300c, 300d, 300e и 300f изображает соответствующие плоскости разрыва в трехмерной системе прямолинейных координат, представленной вертикальной осью 304a и двумя горизонтальными осями 304b и 304c. Вертикальная ось 304a представляет диапазон глубин в подземной зоне; горизонтальная ось 304b представляет диапазон координат Восток-Запад; и горизонтальная ось 304c представляет диапазон координат Юг-Север (все в единицах фута). Как показано на фигурах, оси масштабированы для каждого соответствующего графика. В примерах, показанных на фиг.3A-3F, плоскости разрыва представлены двумерными прямоугольными площадями, проходящими в трехмерной системе координат. Плоскости разрыва могут иметь другие пространственные геометрии.
Начальная плоскость 308a разрыва и обновленные плоскости 308b, 308c, 308d, 308e и 308f разрыва представляют рост и развитие индивидуального разрыва во времени. В показанном примере, идентифицируется начальная плоскость 308a разрыва, когда принимается 40-ое микросейсмическое событие; 87-ое микросейсмическое событие запускает алгоритм обновления. Например, процесс 430, показанный на фиг.4 (или другой процесс), может использоваться для обновления плоскости разрыва, основываясь на новом микросейсмическом событии. Фиг.3B изображает, что обновление плоскости разрыва, основанное на 87-ом микросейсмическом событии, изменяет ориентацию плоскости разрыва. В частности, обновление начальной плоскости 308a разрыва, основанное на 87-ом микросейсмическом событии, вызывает поворот плоскости разрыва в новую ориентацию, и первая обновленная плоскость 308b разрыва имеет другую ориентацию, чем начальная плоскость 308a разрыва. Остальные обновления, показанные на фиг.3C-3F, вызывают распространение плоскости разрыва, и графики изображают, как площадь плоскости разрыва увеличивается с течением времени.
Фиг.3C изображает обновление, основанное на принятом 89-ом микросейсмическом событии. Обновление первой обновленной плоскости 308b разрыва, основанное на 89-ом микросейсмическом событии, вызывает рост плоскости разрыва в вертикальном направлении, и вторая обновленная плоскость 308c разрыва является более высокой, чем первая обновленная плоскость 308b разрыва. Фиг.3D изображает обновление, основанное на принятом 130-ом микросейсмическом событии. Обновление второй обновленной плоскости 308c разрыва, основанное на 130-ом микросейсмическом событии, вызывает рост плоскости разрыва в вертикальном направлении, и третья обновленная плоскость 308d разрыва является более высокой, чем вторая обновленная плоскость 308c разрыва. Фиг.3E изображает обновление, основанное на принятом 152-ом микросейсмическом событии. Обновление третьей обновленной плоскости 308d разрыва, основанное на 152-ом микросейсмическом событии, вызывает рост плоскости разрыва в горизонтальном направлении (к левой стороне на фигуре), и четвертая обновленная плоскость 308e разрыва является более длинной, чем третья обновленная плоскость 308d разрыва. Фиг.3F изображает обновление, основанное на принятом 157-ом микросейсмическом событии. Обновление третьей обновленной плоскости 308d разрыва, основанное на 157-ом микросейсмическом событии, вызывает рост плоскости разрыва в горизонтальном направлении (в правую сторону на фигуре) и в вертикальном направлении, и пятая обновленная плоскость 308f разрыва является более длинной и более высокой, чем четвертая обновленная плоскость 308e разрыва.
Фиг.4 представляет собой блок-схему последовательности операций примерного процесса 400 для обновления плоскостей разрыва. Некоторые или все операции в процессе 400 могут выполняться одним или несколькими вычислительными устройствами. В некоторых реализациях процесс 400 может включать в себя дополнительные, меньшего количества или другие операции, выполняемые в этом же или в другом порядке. Кроме того, одна или несколько из индивидуальных операций или поднаборов операций в процессе 400 могут выполняться изолированно или в других контекстах. Выходные данные, сгенерированные процессом 400, включая выходной результат, сгенерированный промежуточными операциями, могут включать в себя сохраненную, отображаемую, отпечатанную, переданную, сообщенную по связи или обработанную информацию.
В некоторых реализациях некоторые или все операции в процессе 400 исполняются в реальном времени во время обработки по гидравлическому разрыву пласта. Операция может выполняться в реальном времени, например, посредством выполнения операции в ответ на прием данных (например, от датчика или системы мониторинга) без существенной задержки. Операция может выполняться в реальном времени, например, посредством выполнения операции при мониторинге дополнительных микросейсмических данных обработки по гидравлическому разрыву пласта. Некоторые операции в реальном времени могут принимать ввод и создавать вывод во время обработки по гидравлическому разрыву пласта; в некоторых случаях вывод делается доступным пользователю в течение временного кадра, который позволяет оператору ответить на вывод, например, посредством модифицирования обработки по гидравлическому разрыву пласта.
В некоторых случаях некоторые или все операции в процессе 400 исполняются динамически во время обработки по гидравлическому разрыву пласта. Операция может исполняться динамически, например, посредством многократного или повторного выполнения операции, основываясь на дополнительных вводах, например, когда вводы делаются доступными. В некоторых случаях динамические операции выполняются в ответ на прием данных для нового микросейсмического события (или в ответ на прием данных для некоторого количества новых микросейсмических событий и т.д.).
В позиции 402 принимаются микросейсмические данные для нового микросейсмического события. Например, микросейсмические данные могут приниматься от памяти, от удаленного устройства или от другого источника. Данные микросейсмического события могут включать в себя информацию об измеренных местоположениях нового микросейсмического события, информацию об измеренной магнитуде нового микросейсмического события, информацию о неопределенности, ассоциированной с новым микросейсмическим событием, информацию о времени, ассоциированном с новым микросейсмическим событием, и т.д. Данные микросейсмического события могут собираться из наблюдательной скважины, в рабочей скважине, на поверхности или в других расположениях в скважинной системе. Микросейсмические данные обработки по гидравлическому разрыву пласта могут включать в себя данные для микросейсмических событий, обнаруженных перед, во время или после применения обработки по гидравлическому разрыву пласта. Например, в некоторых случаях микросейсмический мониторинг начинается перед тем, как будет применена обработка по гидравлическому разрыву пласта, заканчивается после того, как будет применена обработка по гидравлическому разрыву пласта, или в обоих случаях.
В некоторых случаях новое микросейсмическое событие получается из списка микросейсмических событий. Например, новое микросейсмическое событие, принимаемое в позиции 402, может выбираться из списка микросейсмических событий «состояние изменено» или «неассоциированных» микросейсмических событий. Новым микросейсмическим событием, принимаемым в позиции 402, может быть микросейсмическое событие, которое было обнаружено в любой момент времени, и им может быть или может не быть последнее по времени обнаружения микросейсмическое событие.
В позиции 404 выбирается плоскость разрыва. В некоторых случаях выбранной плоскостью разрыва является одна из многочисленных ранее сгенерированных плоскостей разрыва. В данном случае, плоскость разрыва может рассматриваться «ранее сгенерированной», например, тогда, когда плоскость разрыва генерировалась перед тем, как были приняты данные для нового микросейсмического события (например, в позиции 402). В некоторых реализациях параметрами ранее сгенерированной плоскости разрыва являются параметры, которые были идентифицированы из микросейсмических данных, собранных перед тем, как было обнаружено новое микросейсмическое событие. Данные предшествующего микросейсмического события и новое микросейсмическое событие могут быть частью набора микросейсмических данных от этой же обработки по гидравлическому разрыву пласта подземной зоны. В некотором случае данные предшествующего микросейсмического события и новое микросейсмическое событие происходят от разных обработок по гидравлическому разрыву пласта.
В некоторых случаях, когда данные принимаются в позиции 402, несколько плоскостей разрыва уже были сгенерированы. Например, десятки или сотни плоскостей разрыва могут быть уже идентифицированы из ранее принятых микросейсмических данных. По существу, в некоторых случаях плоскость разрыва выбирается (в позиции 404) из многочисленных ранее сгенерированных плоскостей разрыва. Например, плоскость разрыва может выбираться из списка ранее сгенерированных плоскостей разрыва, основываясь на индексе, критерии выбора или другой информации.
Плоскости разрыва (например, ранее сгенерированная плоскость разрыва, выбранная в позиции 402) и их параметры могут быть вычислены из микросейсмических данных посредством любой подходящей операции, процесса или алгоритма. Плоскость разрыва может идентифицироваться посредством вычисления параметров плоскости разрыва, например, из местоположений и других параметров измеренных микросейсмических событий. В некоторых случаях плоскости разрыва идентифицируются в реальном времени во время обработки по гидравлическому разрыву пласта. Примерные методы идентификации плоскостей разрыва из микросейсмических данных описаны в предварительной заявке США № 61/710 582, поданной 5 октября 2012 г.
В позиции 406 выбранная плоскость разрыва обновляется на основе нового микросейсмического события. Первая плоскость разрыва может обновляться посредством любой подходящей операции, процесса или алгоритма. В некоторых случаях первая плоскость разрыва обновляется на основе некоторых параметров (например, ориентации, площади, невязки расстояния и т.д.), ассоциированных с первой плоскостью разрыва. Примерные методы для обновления плоскостей разрыва на основе новых микросейсмических данных описываются в предварительной заявке США № 61/710 582, поданной 5 октября 2012 г.
В позиции 408 выбирается другая отличающаяся плоскость разрыва. Плоскостью разрыва, выбранной в позиции 408, может быть одна из других ранее сгенерированных плоскостей разрыва (т.е. другой, чем первая плоскость разрыва, выбранная в позиции 404). Вторая плоскость разрыва (выбранная в позиции 408) может выбираться на основе информации, сгенерированной посредством обновления первой плоскости разрыва (в позиции 406). Например, вторая плоскость разрыва может выбираться на основе ее зависимости от обновленной плоскости разрыва, или на основе ее зависимости от микросейсмических данных, оказывающих влияние на обновленную плоскость разрыва. Например, вторая плоскость разрыва может выбираться на основе ее зависимости от обновленного местоположения, области, размера или ориентации первой плоскости разрыва, или вторая плоскость разрыва может выбираться на основе ее зависимости от микросейсмического события, которое было диссоциировано от первой плоскости разрыва или ассоциировано с ней.
Как показано на фиг.4, плоскость разрыва, выбранная в позиции 408, затем может обновляться, например, когда процесс 400 возвращается в позицию 406. Процесс 400 может выполнять итерацию операций 406 и 408 один или несколько раз. Например, выполнение итераций операций 406 и 408 может вызывать распространение обновлений на основе нового микросейсмического события на одну, две, десятки или даже сотни плоскостей разрыва. Обновления могут распространяться каскадным образом. Например, плоскости разрыва могут обновляться последовательно или параллельно, причем каждое обновление принимает во внимание предыдущие обновления для других плоскостей разрыва.
В некоторых примерах каскадные обновления могут продолжаться до тех пор, пока не будет достигнут порог, пока не будет принято новое микросейсмическое событие, или пока не будет достигнуто другое завершающее условие. В некоторых случаях каскадные обновления завершаются, когда плоскости разрыва достигают стабильное состояние, и дальнейшие обновления не генерируют улучшенное решение. Обновления могут завершаться, например, когда значение достоверности достигает некоторого значения или увеличивается на некоторую величину. Обновления могут завершаться, например, когда нет неассоциированных микросейсмических событий, когда нет микросейсмических событий с измененным состоянием, или когда все микросейсмические события ассоциируются с плоскостью разрыва.
В некоторых случаях обновление второй плоскости разрыва (или любой последующей плоскости разрыва) включает в себя объединение первой плоскости разрыва и второй плоскости разрыва. В некоторых случаях вторая плоскость разрыва выбирается (в позиции 404) на основе определения, что первая плоскость разрыва и вторая плоскость разрыва должны объединяться, так как они представляют одну и ту же физическую плоскость разрыва. Например, вторая плоскость разрыва может выбираться на основе определения, что первая плоскость разрыва и вторая плоскость разрыва разделяются расстоянием, которое меньше порогового расстояния, определения, что первая плоскость разрыва и вторая плоскость разрыва пересекаются под углом, который меньше порогового угла, или любого другого подходящего критерия.
В некоторых случаях обновление первой плоскости разрыва (в позиции 406) вызывает то, что микросейсмическое событие (кроме нового микросейсмического события, принятого в позиции 402) становится диссоциированным от первой плоскости разрыва. Вторая плоскость разрыва может выбираться (в позиции 408) на основе близости второй плоскости разрыва к диссоциированному микросейсмическому событию. Вторая плоскость разрыва затем может обновляться, например, посредством ассоциирования второго микросейсмического события со второй плоскостью разрыва и обновления второй плоскости разрыва на основе второго микросейсмического события.
В некоторых случаях вторая плоскость разрыва выбирается (в позиции 408) на основе микросейсмического события, диссоциируемого от второй плоскости разрыва. Например, обновление первой плоскости разрыва (в позиции 406) может вызывать то, что микросейсмическое событие, которое ранее было ассоциировано со второй плоскостью разрыва, становится ассоциированным с первой плоскостью разрыва. Вторая плоскость разрыва тогда может обновляться, например, на основе других оставшихся микросейсмических событий, которые ассоциируется со второй плоскостью разрыва.
В некоторых реализациях первая плоскость разрыва и вторая плоскость разрыва обновляются, чтобы максимизировать соответствующий индекс определенности, или уровень достоверности каждой из первой плоскости разрыва и второй плоскости разрыва, или максимизировать индекс определенности, или уровень достоверности общих систем плоскостей разрыва. В некоторых случаях первая плоскость разрыва и вторая плоскость разрыва обновляются, чтобы минимизировать количество неассоциированных микросейсмических событий. В некоторых реализациях обновление плоскостей разрыва и распространение обновлений плоскости разрыва может выполняться на основе, частично, примерных алгоритмов, описанных ниже, или на основе любых дополнительных или других методов.
В некоторых реализациях генерируется графическое представление обновленных плоскостей разрыва. Графическое представление может отображаться, например, для представления обновленной плоскости разрыва в реальном времени во время обработки по гидравлическому разрыву пласта. Графическое представление может включать в себя единственную плоскость разрыва или многочисленные плоскости разрыва. Графическое представление может включать в себя трехмерное представление плоскости разрыва, трехмерное представление микросейсмических событий, ассоциированных с плоскостью разрыва, или комбинацию этих и других признаков. Примеры графического представления плоскости разрыва изображены на фиг.3A, 3B, 3C, 3D, 3E и 3F. Могут использоваться другие типы графических представлений.
Графическое представление может отображаться на мониторе, экране или на устройстве отображения другого типа. В некоторых случаях отображение обновляется. Например, отображаемое графическое представление может обновляться на основе данных дополнительного микросейсмического события из измерения разрыва. Отображение (и в некоторых случаях обновление) графического представления может давать возможность пользователю просматривать динамическое поведение, ассоциированное с обработкой по гидравлическому разрыву пласта. В некоторых случаях плоскость разрыва может обновляться, когда накапливаются дополнительные микросейсмические данные, и обновления могут вызывать рост или изменение ориентации плоскости разрыва.
Плоскости разрыва могут быть получены из или могут поддерживаться набором микросейсмических данных для микросейсмических событий. Данные микросейсмического события могут включать в себя информацию об измеренных местоположениях микросейсмических событий, информацию об измеренной магнитуде микросейсмических событий, информацию о неопределенности, ассоциированной с микросейсмическими событиями, информацию о времени, ассоциированном с микросейсмическими событиями и т.д. Точка может ссылаться на элемент данных или событие данных в наборе микросейсмических данных. В некоторых случаях набор микросейсмических данных может включать в себя N точек данных в трехмерном пространстве. Трехмерная ошибка может ассоциироваться с каждой из этих точек. Для данного общего индекса неопределенности, может обрабатываться примерный алгоритм для нахождения местоположений и ориентаций плоскостей разрыва, ассоциированных с этим набором данных, где каждый с индексом определенности, который больше или равен минимальному индексу определенности. В конце (или в любой точке во время) процесса каждая из точек может ассоциироваться с одной плоскостью, или несколькими плоскостями, или может не ассоциироваться ни с какой плоскостью. Точки, которые не ассоциированы ни с какой плоскостью, принадлежат неассоциированному блоку, которые могут интерпретироваться как выбросы.
В некоторых реализациях алгоритм может назначать массив индексов определенности каждой точке данных и каждой плоскости разрыва. Например, обозначая p как текущее количество найденных плоскостей, массив индексов определенности может содержать последовательность p скалярных чисел si, 1≤i≤p, указывающих определенность или вероятность, которая ассоциируется с плоскостью i. Определенность, что вычисленная плоскость является правильной, может быть связана с релевантной определенностью всех из ее ассоциированных точек. Например, если S представляет собой набор всех точек, которые ассоциированы с данной плоскостью, и d представляет собой расстояние среднего значения точки от плоскости, алгоритм может предполагать, что является минимальной сумма значений d в степени r. В некоторых аспектах реализаций r может быть равен 1 или 2 или любому другому подходящему значению. Эта сумма представляет собой один из аспектов или благоприятствующих факторов для определенности плоскости. В некоторых случаях алгоритм может исполняться, чтобы максимизировать сумму определенности каждой плоскости в степени r.
В некоторых реализациях ориентация плоскости разрыва может включать в себя два угла, которые определяют общее направление плоскости в трехмерном пространстве, и они могут упоминаться как составляющие ориентации плоскости. Параметры плоскости разрыва могут включать в себя ориентацию и положение плоскости или любые другие соответствующие параметры. Например, тройка, набор из трех точек в трехмерной среде, может использоваться для представления параметров плоскости разрыва. Набор данных может содержать набор трехмерных точек, основываясь на которых может быть решена модель плоскости разрыва. Точка может иметь состояние «ассоциированная» или неассоциированная» в зависимости от того, ассоциируется ли или не ассоциируется ли эта точка с плоскостью. «Поддержка» плоскости может включать в себя набор точек, которые ассоциируются с плоскостью.
В некоторых реализациях могут определяться некоторые пороговые параметры. Пороговые параметры могут включать в себя, например, минимальную определенность для точки, что она принадлежит плоскости, минимальную определенность, что набор точек определяет плоскость, минимальную определенность, что являются оптимальными ориентации и положения общей плоскости, или минимальное значение σ, ниже которого выбираются основные ориентации обычной гистограммы. Могут использоваться дополнительные или другие пороговые параметры.
В некоторых реализациях могут задаваться некоторые фиксированные числовые параметры примерного алгоритма. Фиксированные числовые параметры могут включать в себя, например, минимальное количество точек в неассоциированном блоке, который рассматривается для смены параметров плоскости, норму r, посредством которой выполняется оптимизация (например, r может быть равен 1 или 2), минимальную поддержку, которая представляет собой минимальное количество точек, которые могут поддерживать плоскость. Могут рассматриваться дополнительные или другие фиксированные числовые параметры. В качестве конкретного примера, минимальная поддержка плоскости может составлять пять точек; r может быть равен 2; порог расстояния может быть установлен как 3σ; и минимальный угол может быть установлен как 8 градусов. Другие значения могут использоваться для этих и других параметров. Могут задаваться дополнительные или другие параметры и их соответствующие значения.
В некоторых реализациях алгоритмы могут включать в себя несколько этапов. Этап может включать в себя последовательность нескольких фаз. Этап или фаза могут выполняться итеративным образом. Примерный алгоритм может включать в себя один или несколько из следующих этапов и фаз. В некоторых сценариях некоторые этапы и фазы могут выполняться в этом же или другом порядке. В некоторых реализациях могут выполняться дополнительные, меньшего количества или другие этапы и фазы. В некоторых случаях один или несколько из индивидуальных этапов, фаз или поднаборов этапов и фаз могут выполняться изолированно, с повторением или в других контекстах.
На начальном этапе («Этап 0») алгоритма готовятся расчетные данные для алгоритма. Например, в Фазе 1 этапа 0 может быть получена первая оценка для первичных ориентаций. В качестве конкретного примера, алгоритм может начинаться реализацией простой гистограммы для всех троек в наборе данных и использованием усовершенствованного преобразования Хафа для двух составляющих ориентации. Алгоритм может выбирать гиперкуб с σ меньшей данного порога, что может указывать, например, что эти двумерные точки гиперкуба гистограммы находятся на наиболее релевантных и главных или основных ориентациях плоскостей. Обозначая q в качестве количества выбранных первичных ориентаций, эти q разных первичных ориентаций могут сортироваться в отношении их σ, и для каждой из них алгоритм может вычислять все разные ориентации, основываясь на точках в конкретном гиперкубе.
В Фазе 2 Этапа 0, для каждой из выбранных q плоскостей, могут выполняться некоторые или все из следующих операций: для гиперкуба каждой из этих плоскостей построить все тройки, поддерживающие ориентацию, находящуюся в этом гиперкубе, и вычислить эти положения плоскостей. Эти плоскости сортируются в отношении их расстояний от начала отсчета. Имеется Ci плоскостей троек для первичной ориентации i. Эти плоскости могут служить в качестве начальных условий для процесса, определенного на Этапе 1. Следующая фаза может начинаться с ориентации с высокой достоверностью (например, ориентация с минимальной σ).
В Фазе 3 Этапа 0 задаются некоторые фиксированные числовые значения, например, норма или степень r, максимальное количество итераций, минимальное расстояние между плоскостями, минимальные углы между плоскостями, минимальное количество ассоциированных точек в плоскости, максимальное количество плоскостей, совместно используемых одной точкой, или любой другой подходящий параметр.
Для одного или нескольких последующих этапов (обозначенных «Этап i», где 1≤i≤q), на этапе алгоритм может пытаться зафиксировать плоскость в пространственном трехмерном пространстве, которое находится примерно в первичной ориентации, которая была вычислена на Этапе 0. Может использоваться начальная приблизительная оценка для ее расположения. Затем алгоритм может производить итерацию, чтобы лучше идентифицировать и улучшить положение плоскости в данном пространстве.
В некоторых реализациях для каждой из q первичных ориентаций может выполняться следующий процесс. В Фазе 0 «Этапа i» установить j=0. В Фазе 1 «Этапа i» установить j=j+1 и использовать j-ую плоскость в Ci в качестве начального условия для следующего процесса. В Фазе 2 «Этапа i» расположить i-ую плоскость, используя ее j-ое начальное условие. В качестве примера, используя наивысшую достоверную ориентацию в результатах Фазы 1 и используя все точки данных, плоскость с этой ориентацией может быть оптимально или почти оптимально расположена для данного значения r. В некоторых реализациях вычисление расположения может выполняться в линейном времени центрального процессора (CPU) в отношении размера точек в наборе данных. В некоторых аспектах реализации каждой точке может быть назначена значение определенности или достоверности в ее массиве индексов определенности, который может быть, например, обратно пропорциональным 1 плюс расстояние от плоскости плюс ее погрешность определения положения. Состояние точек с индексом определенности меньшим минимального порога может быть изменено на «неассоциированное», и плоскость может быть повторно расположена на основе набора ассоциированных точек. Эта фаза может повторяться до тех пор, пока не будет достигнуто окончательное положение. Это может занять, например, две или три или более итераций для достижения этого состояния. После первой итерации алгоритм позволяет составляющим ориентации плоскости оптимизироваться надлежащим образом или улучшаться иным образом, и изменения ориентации могут быть минимальными (или в некоторых случаях изменения могут быть существенными).
В Фазе 3 «Этапа i» может определяться окончательная поддержка для плоскости. Каждая из неассоциированных точек может быть снова проверена по сравнению с окончательным положением плоскости, чтобы верифицировать, что она действительно является неассоциированной. Если имеется возможность изменения ее состояния на «ассоциированная», неассоциированная точка может быть помещена во временный блок «требуют обработки». В некоторых случаях может быть доказано, что положение плоскости не будет меняться сильно из-за накопленных точек в блоке «требуют обработки». Тем не менее, если количество точек больше порогового количества, положению этой плоскости может быть придана другая форма, и могут быть выполнены соответствующие изменения в массивах индексов определенности.
В Фазе 4 «Этапа i» может определяться одобрение плоскости. Если результирующая плоскость не имеет минимальной поддержки, она может быть удалена. В Фазе 5 «Этапа i» алгоритм может вернуться на Фазу 2. Используя следующее начальное условие, он может искать новое положение для данной ориентации. Алгоритм может продолжаться до тех пор, пока не будут использованы все начальные условия.
В некоторых реализациях сортируются плоскости, принадлежащие текущей первичной ориентации. Плоскости, которые находятся близко друг к другу, могут объединяться. В некоторых случаях, если объединение будет иметь результатом «Нет плоскости», тогда первоначальные плоскости остаются в виде отдельных плоскостей разрыва. После того как все объединения выполнены надлежащим образом, может выполняться другой процесс повторного ассоциирования для неассоциированных точек. Алгоритм может переходить в Фазу 0 следующего первичного направления (т.е. «Этапа i+1»).
На следующем этапе может проверяться угол между двумя плоскостями. Если угол меньше порога, плоскости могут объединяться. Если результатом объединения является «Нет плоскостей», тогда остаются первоначальные плоскости. После того как будут выполнены все объединения надлежащим образом, может выполняться другой процесс повторного ассоциирования для неассоциированных точек.
На следующем этапе может проверяться количество ассоциирований каждой точки. Если количество больше порога, точка может быть помечена как возможный вариант, подлежащий изменению на неассоциированное состояние. Для каждой из плоскостей алгоритм может начинать удалять неассоциированные точки, основываясь на их отсортированном уровне достоверности от малого до большого, например, до тех пор, пока плоскости продолжают быть достоверными. На следующем этапе алгоритм может пытаться ассоциировать все неассоциированные точки, которые не превышают максимальной ассоциации.
Реализации могут включать в себя одно или несколько из следующих признаков. Плоскость может определяться по ее идентификатору (ID), составляющим ориентации, положению и точкам, которые ассоциируются с ней, или по любой другой соответствующей идентификации. В некоторых реализациях точка также может иметь вектор ID плоскостей, с которым она ассоциируется, вместе с ее расстоянием от каждой из них. Оператор «Объединить» может находить две плоскости и объединять их, например, посредством нахождения новой плоскости (по определению 1 выше), основываясь на всех поддерживающих точках двух первоначальных плоскостей. В некоторых случаях некоторые точки могут стать «неассоциированными». Если результирующая плоскость не очень хорошо поддерживается, эта операция может приводить к «Нет плоскости», и две первоначальные плоскости остаются действующими.
В некоторых реализациях алгоритм может включать в себя 3 уровня итераций. Внешний контур обходит все идентифицированные первичные ориентации. Для каждой идентифицированной первичной ориентации алгоритм включает в себя средний контур, операцию объединения плоскостей с малым углом, и контур повторного ассоциирования для неассоциированных точек. Средний контур обходит все начальные условия соответствующей первичной ориентации и может дополнительно включать в себя внутренний контур и процедуру объединения близких плоскостей. Внутренний контур производит итерацию по всем относящимся точкам до тех пор, пока не будет достигнута сходимость для каждого начального условия. В некоторых случаях, если плоскость начального условия находится близко к одной из существующих плоскостей, алгоритм может переходить непосредственно к процедуре объединения.
В некоторых случаях алгоритм может способствовать максимизированию (или улучшению иным образом) уровня достоверности каждой плоскости; максимизированию (или улучшению иным образом) уровня достоверности всей системы плоскостей; минимизированию (или улучшению иным образом) количества неассоциированных событий; или достижению сочетания этих и других целей. В некоторых случаях алгоритм может предлагать более одного решения. Предлагаемые решения могут быть очень близкими друг к другу в отношении некоторых параметров.
В некоторых реализациях точка данных события может поддерживать более одной плоскости разрыва. Могут быть некоторые физические или эксплуатационные причины, что может потребоваться ограничение количества плоскостей, совместно используемых любыми микросейсмическими событиями. Это может быть реализовано с использованием метода, упоминаемого как «совместное использование - p». Например, совместное использование - 2 означает, что события могут поддерживать 2 разные плоскости максимум. Совместное использование - 4 означает, что события могут совместно использовать 4 плоскости максимум. Совместное использование - 1 означает, что событие может поддерживать только 1 плоскость максимум, и совместное использование - бесконечность означает, что нет ограничения на совместное использование. В некоторых случаях операторы и пользователи могут использовать совместное использование - 2. В некоторых случаях пользователи могут проводить два параллельных представления: одно - окно с тремя уровнями достоверности для совместного использования - 1, и три окна с уровнем достоверности совместного использования - 2. В некоторых реализациях алгоритм, основанный на признаках микросейсмического события, и существующая структура или конфигурация плоскостей разрыва могут быть способны присоединить к ней соответствующий параметр «совместного использования».
В некоторых случаях принцип совместного использования - p может уменьшить сложность алгоритма соответствия разрыва для сцены, которая является более управляемой и лучше понимаемой пользователями. В некоторых случаях алгоритм может включать в себя «совместное использование - 2» в качестве установки по умолчанию, и параметр «p» в «совместном использовании - p» может меняться внутри данного поля микросейсмических событий.
Некоторые варианты осуществления объекта изобретения и операций, описанных в данном описании изобретения, могут быть реализованы в цифровой электронной схеме или компьютерным программным обеспечением, аппаратно-программным обеспечением или аппаратным обеспечением, включая конструкции, описанные в данном описании изобретения, и их конструктивные эквиваленты, или в комбинации одного или нескольких из них. Некоторые варианты осуществления объекта изобретения, описанные в данном описании изобретения, могут быть реализованы в виде одной или нескольких компьютерных программ, т.е. в виде одного или нескольких модулях инструкций компьютерной программы, кодированных на носителе данных компьютера для исполнения устройством обработки данных или для управления его работой. Носитель данных компьютера может быть, или он может быть включен в него, машиночитаемым запоминающим устройством, машиночитаемой запоминающей подложкой, матрицей или устройством памяти с произвольным или последовательным доступом, или комбинацией из одного или более из них. Кроме того, в то время как носителем данных компьютера не является распространяемый сигнал, носитель данных компьютера может представлять собой источник или пункт назначения инструкций компьютерной программы, кодированных в искусственно сгенерированном распространяемом сигнале. Носитель данных компьютера также может представлять собой, или может быть включен в, один или более отдельных физических компонентов или носителей (например, многочисленные компакт-диски (CD), диски или другие запоминающие устройства).
Термин «устройство обработки данных» охватывает все виды устройств, приборов и машин для обработки данных, включая, в качестве примера, программируемый процессор, компьютер, систему на кристалле или многочисленные количества, или комбинации вышеупомянутых. Устройство может включать в себя специализированные логические схемы, например, программируемую вентильную матрицу (FPGA) или специализированную интегральную схему (ASIC). Устройство также может включать в себя, в дополнение к аппаратному обеспечению, код, который создает среду исполнения для рассматриваемой компьютерной программы, например, код, который составляет аппаратно-программное обеспечение, стек протоколов, систему управления базой данных, операционную систему, межплатформенную среду исполнения, виртуальную машину или комбинацию из одного или нескольких из них. Устройство и среда исполнения могут реализовать различные разные инфраструктуры вычислительной модели, такие как веб-службы, распределенные вычислительные и сетевые вычислительные инфраструктуры.
Компьютерная программа (также известная как программа, программное обеспечение, программное приложение, сценарий или код) может быть написана на языке программирования любого вида, включая компилируемые и интерпретируемые языки, декларативные или процедурные языки. Компьютерная программа может соответствовать, но не должна соответствовать файлу в файловой системе. Программа может храниться в части файла, который содержит другие программы или данные (например, один или несколько сценариев, хранимых в документе языка разметки), в единственном файле, выделенном рассматриваемой программе, или в многочисленных согласованных файлах (например, файлах, которые хранят один или несколько модулей, подпрограмм или частей кода). Компьютерная программа может применяться для исполнения на одном компьютере или на многочисленных компьютерах, которые расположены в одном месте или распределены по многочисленным местам и соединены между собой сетью передачи данных.
Некоторые из процессов и логических потоков, описанных в данном описании изобретения, могут выполняться одним или несколькими программируемыми процессорами, исполняющими одну или несколько компьютерных программ для выполнения действий посредством выполнения операций над входными данными и генерирования выходного результата. Процессы и логические потоки также могут выполняться посредством, и устройство также может быть реализовано в виде специальных логических схем, например, программируемой вентильной матрицы (FPGA) или специализированной интегральной схемы (ASIC).
Процессоры, пригодные для исполнения компьютерной программы, включают в себя, в качестве примера, микропроцессоры как общего назначения, так и специального назначения и процессоры любого вида цифрового компьютера. Как правило, процессор принимает инструкции и данные от постоянного запоминающего устройства или оперативного запоминающего устройства или от обоих. Компьютер включает в себя процессор для выполнения действий в соответствии с инструкциями и одно или несколько устройств памяти для хранения инструкций и данных. Компьютер также может включать в себя или быть функционально подсоединенным для приема данных от или переноса данных на, или для обоих действий, одно или несколько массовых запоминающих устройств для хранения данных, например, магнитные, магнитооптические диски или оптические диски. Однако компьютеру нет необходимости иметь такие устройства. Устройства, пригодные для хранения инструкций компьютерной программы и данных, включают в себя все виды энергонезависимой памяти, носители данных и устройства памяти, включая, в качестве примера, устройства полупроводниковой памяти (например, стираемое программируемое постоянное запоминающее устройство (EPROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), устройства флэш-памяти и другие), магнитные диски (например, внутренние жесткие диски, съемные диски и другие), магнитооптические диски и компакт-диски (CD-ROM) и цифровые многофункциональные диски только для чтения (DVD-ROM). Процессор и память могут быть дополнены логическими схемами специального назначения, или они могут быть встроены в них.
Чтобы обеспечить взаимодействие с пользователем, операции могут быть реализованы на компьютере, имеющем устройство отображения (например, монитор или устройство отображения другого типа) для отображения информации пользователю, и указательное устройство (например, мышь, трекбол, планшет, сенсорный экран или указательное устройство другого типа), посредством которого пользователь может обеспечивать ввод в компьютер. Другие виды устройств также могут использоваться для обеспечения взаимодействия с пользователем; например, обратной связью, обеспечиваемой для пользователя, может быть сенсорная обратная связь любого вида, например, визуальная обратная связь, слуховая обратная связь или тактильная обратная связь; и ввод от пользователя может приниматься в любом виде, включая акустический, речевой или тактильный ввод. Кроме того, компьютер может взаимодействовать с пользователем посредством посылки документов на и приема документов от устройства, которое используется пользователем; например, посредством посылки веб-страниц веб-браузеру на клиентском устройстве пользователя в ответ на запросы, принимаемые от веб-браузера.
Клиент и сервер являются обычно удаленными друг от друга и обычно взаимодействуют посредством сети передачи данных. Примеры сетей передачи данных включают в себя локальную сеть (LAN) и глобальную сеть (WAN), интерсеть (например, Интернет), сеть, содержащую спутниковую линию связи, и одноранговые сети (например, эпизодические одноранговые сети). Взаимоотношения клиента и сервера происходят посредством компьютерных программ, выполняющихся на соответствующих компьютерах и имеющих клиент-серверные взаимоотношения друг с другом.
В некоторых аспектах того, что описано здесь, преобладающие ориентации, внедренные в наборы разрывов, ассоциированных с микросейсмическими событиями, могут динамически идентифицироваться во время обработки по гидравлическому разрыву пласта. Например, плоскости разрыва могут извлекаться из микросейсмических событий в реальном времени, собранных с месторождения. Плоскости разрыва могут идентифицироваться на основе информации о микросейсмическом событии, включающей в себя: местоположения события, неопределенности измерения местоположения события, магнитуды по сейсмическому моменту события, моменты времени наступления события и другие. В каждый момент времени данные могут ассоциироваться с ранее вычисленными базовыми плоскостями, включая микросейсмические поддерживающие наборы событий.
В некоторых аспектах того, что описано здесь, гистограмма или распределение вероятности базовых плоскостей могут быть построены из собранных микросейсмических событий, и гистограмма или распределение могут использоваться для вывода преобладающих ориентаций разрыва. Разрывы, извлеченные вдоль преобладающих ориентаций, могут в некоторых случаях обеспечивать оптимальное соответствие с микросейсмическими событиями реального времени. Гистограмма или распределение и преобладающие ориентации могут иметь не пренебрежимо малую чувствительность к новому поступающему микросейсмическому событию. По существу, некоторые плоскости, идентифицированные во время того, когда ассимилируются временные микросейсмические данные, могут не быть точными по сравнению с результатами пост-данных микросейсмического события. Примерные методы для генерирования, обновления и использования гистограмм, основываясь на микросейсмических данных, описываются в предварительной заявке США № 61/710 582, поданной 5 октября 2012 г.
В некоторых аспектах того, что описано здесь, параметр достоверности точности может обеспечивать меру для точности идентифицированных плоскостей в реальном времени. Факторы, влияющие на достоверность точности плоскости, могут включать в себя внутренние свойства события, зависимость между событиями поддержки и плоскостью и весовой коэффициент, отражающий общие направления ориентации разрыва пост-данных микросейсмического события. В некоторых случаях плоскости разрыва с высокой достоверностью в конце обработки по гидравлическому разрыву пласта, которые были идентифицированы в реальном времени, являются совместимыми с теми, которые были получены из пост-данных события.
В некоторых аспектах некоторые или все признаки, описанные в данном документе, могут объединяться или реализоваться отдельно в одной или нескольких программах программного обеспечения для автоматизированного картирования разрыва в реальном времени. Программное обеспечение может быть реализовано в виде продукта компьютерной программы, установленного приложения, клиент-серверного приложения, приложения Интернета или программного обеспечения любого другого подходящего типа. В некоторых случаях программа автоматизированного картирования разрыва в реальном времени может динамически показывать пользователям пространственное и временное развитие идентифицированных плоскостей разрыва в реальном времени по мере постепенного накапливания микросейсмических событий. Динамика может включать в себя, например, генерирование новых разрывов, распространение и рост существующих разрывов, или другую динамику. В некоторых случаях программа автоматизированного картирования разрыва в реальном времени может предоставлять пользователям возможность просматривать идентифицированные плоскости разрыва в реальном времени на многочисленных уровнях достоверности. В некоторых случаях пользователи могут наблюдать пространственное и временное развитие разрывов с высоким уровнем достоверности, что может проявлять преобладающие общие направления общих данных микросейсмического события. В некоторых случаях программа автоматизированного картирования разрыва в реальном времени может оценивать достоверность точности разрыва, например, для измерения определенности идентифицированных плоскостей разрыва. Значения достоверности точности, например, могут помогать пользователям лучше понимать и анализировать изменения в гистограмме вероятности или распределении ориентации, которые могут непрерывно изменяться с накоплением в реальном времени микросейсмических событий. В некоторых случаях программа автоматизированного картирования разрыва в реальном времени может обеспечивать результаты, которые являются согласующимися с картированием разрыва пост-данных. Например, в конце обработки по гидравлическому разрыву пласта результаты, созданные программой автоматизированного картирования разрыва в реальном времени, могут быть статистически согласующимися с теми, которые были получены программой автоматизированного картирования разрыва пост-данных, работающей с этими же данными. Такие признаки могут давать возможность промысловым инженерам, операторам и аналитикам динамически визуализировать и выполнять мониторинг пространственного и временного развития гидравлических разрывов, анализировать сложность разрыва и геометрию коллектора, оценивать эффективность обработки по гидравлическому разрыву пласта и улучшать работу скважины.
Хотя данное описание изобретения содержит многочисленности подробности, они не должны толковаться как ограничения объема того, что может быть заявлено, но скорее как описания признаков, характерных для конкретных примеров. Также могут объединяться некоторые признаки, которые описаны в данном описании изобретения в контексте отдельных реализаций. И наоборот, различные признаки, которые описаны в контексте единственной реализации, также могут реализоваться в многочисленных вариантах осуществления отдельно или в любой подходящей подкомбинации.
Был описан ряд вариантов осуществления. Тем не менее, понятно, что могут быть выполнены различные модификации. Следовательно, другие варианты осуществления находятся в пределах объема нижеследующей формулы изобретения.
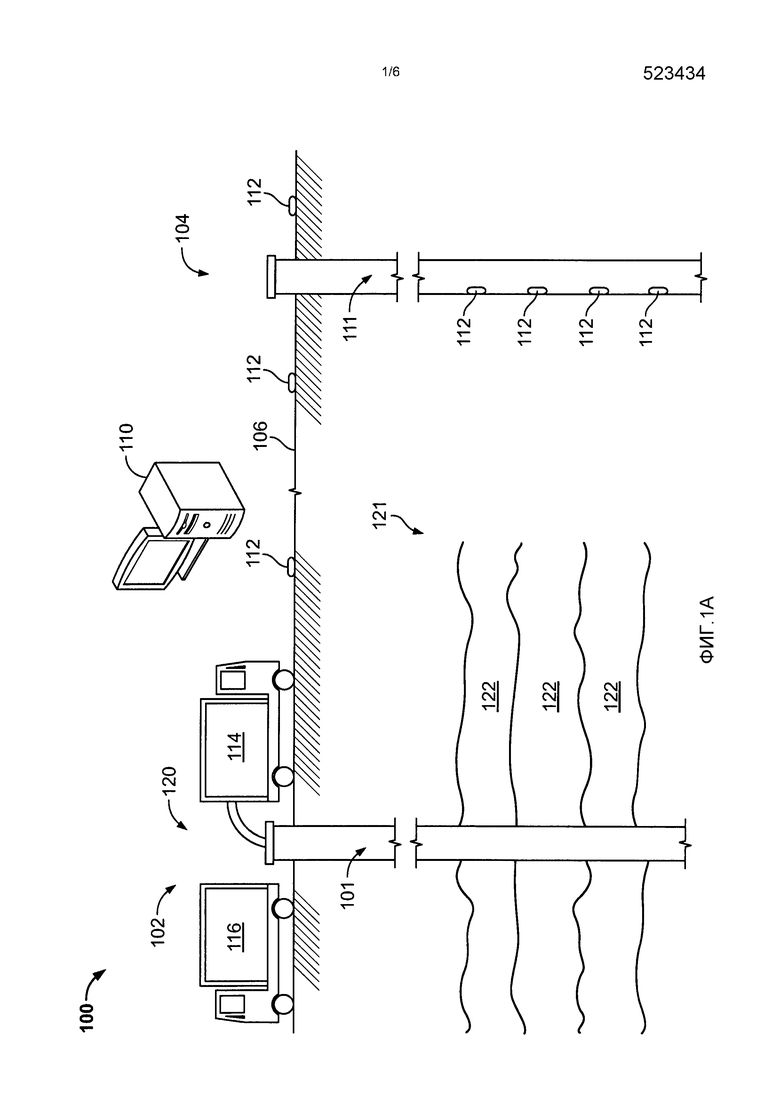
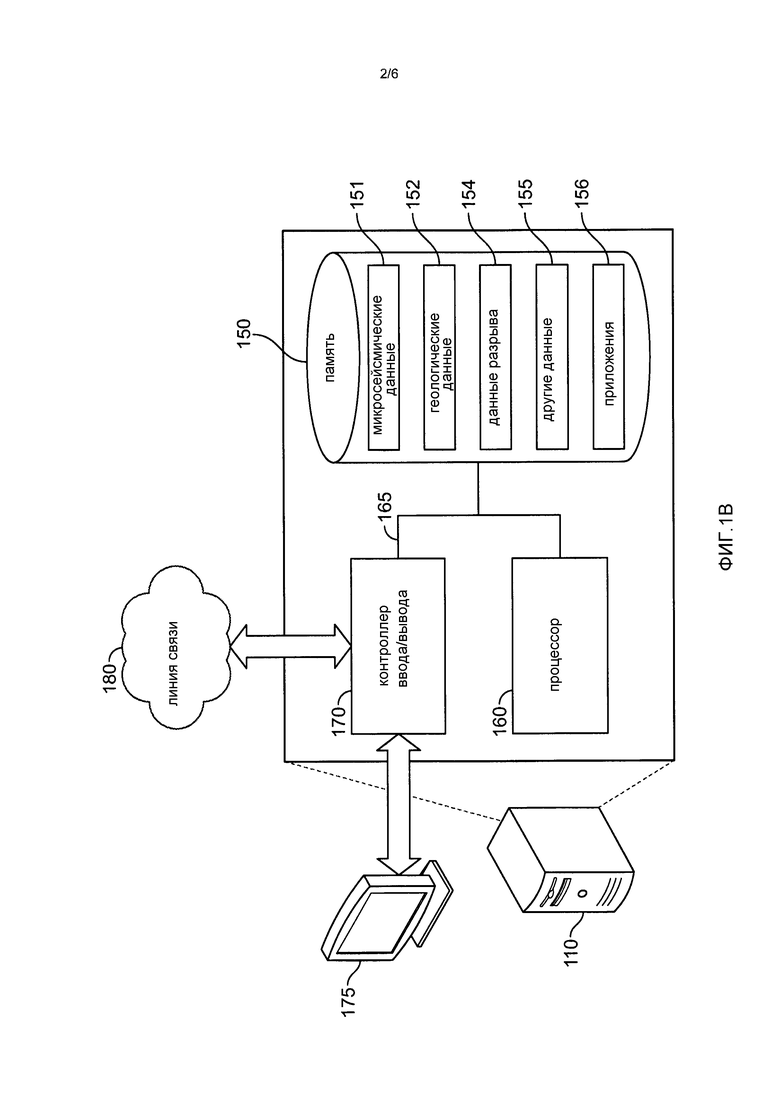
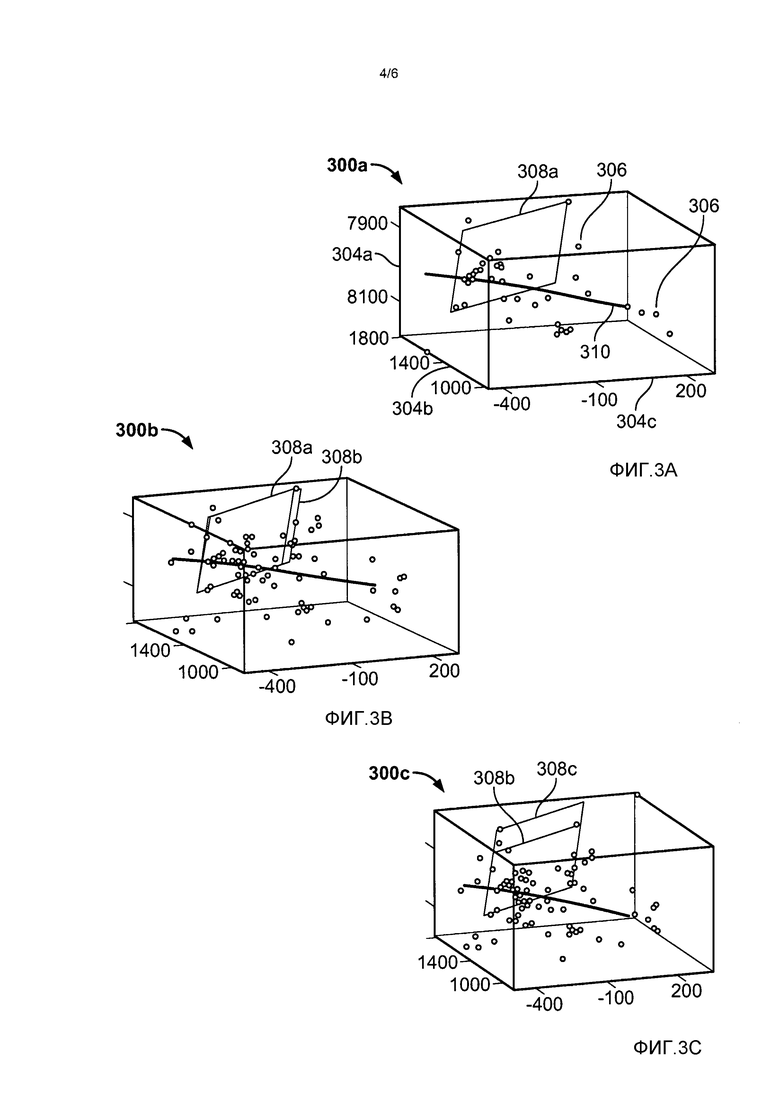
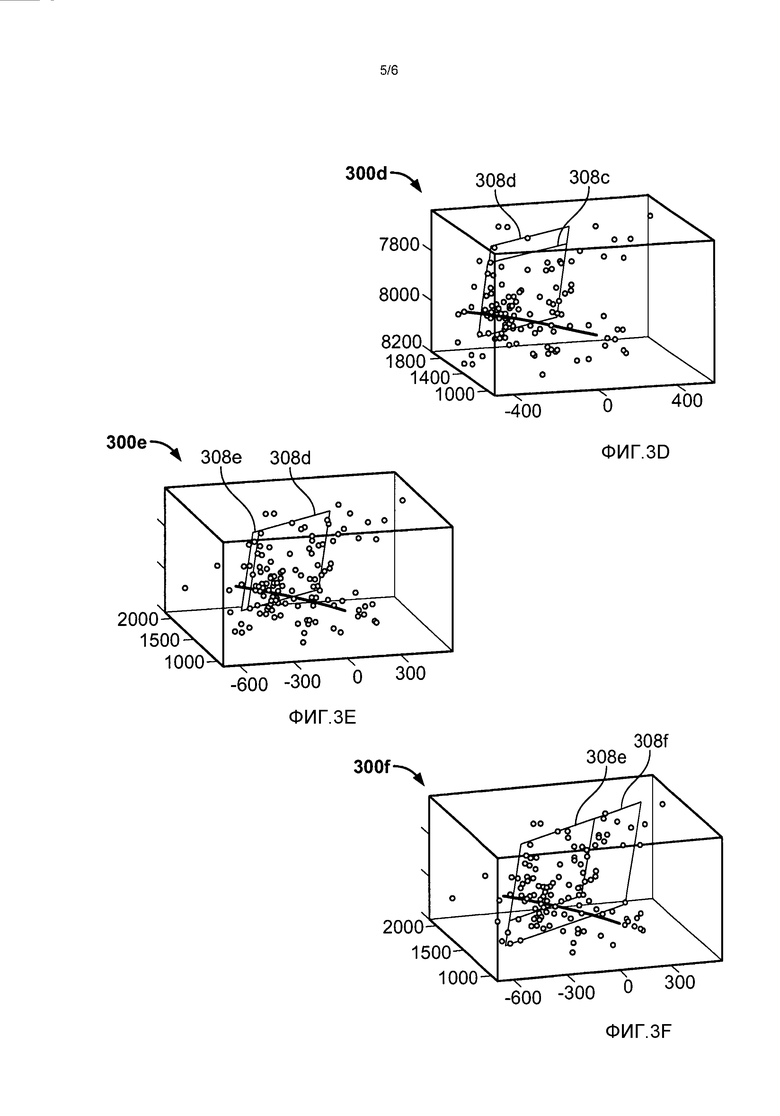
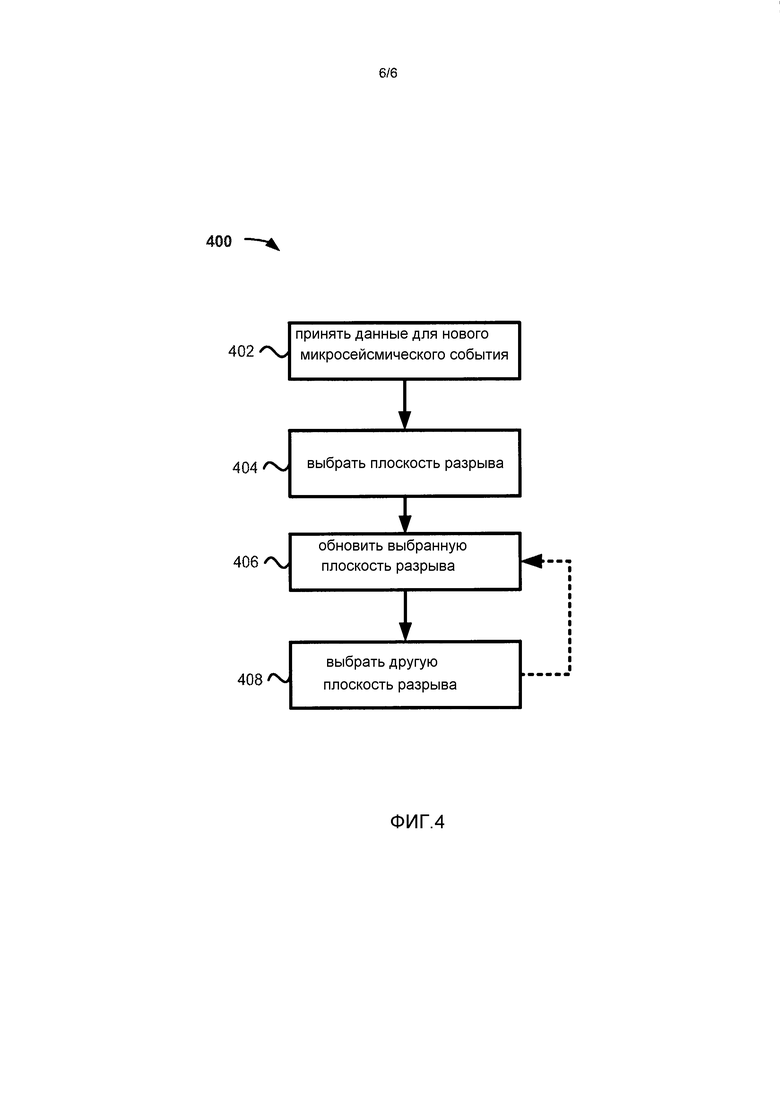
Изобретение относится к области геофизики и может быть использовано для анализа микросейсмических данных в процессе гидравлического разрыва пласта. Системы, способы и программное обеспечение могут использоваться для обновления плоскостей разрыва, основываясь на микросейсмических данных обработки по гидравлическому разрыву пласта. В некоторых аспектах первая плоскость разрыва обновляется на основе микросейсмического события в наборе микросейсмических данных, ассоциированном с обработкой по гидравлическому разрыву пласта. Первая плоскость разрыва представляет собой одну из множества ранее сгенерированных плоскостей разрыва. Вторая другая плоскость разрыва из ранее сгенерированных плоскостей разрыва обновляется, принимая во внимание информацию, сгенерированную посредством обновления первой плоскости разрыва, основываясь на микросейсмическом событии. Технический результат - повышение точности получаемых данных. 3 н. и 17 з.п. ф-лы, 10 ил., 1 табл.
1. Реализуемый на компьютере способ анализа микросейсмических данных обработки по гидравлическому разрыву пласта, причем способ содержит:
обновление устройством обработки данных первой плоскости разрыва, основываясь на микросейсмическом событии в наборе микросейсмических данных, ассоциированном с обработкой по гидравлическому разрыву пласта, причем первая плоскость разрыва является одной из множества ранее сгенерированных плоскостей разрыва; и
обновление второй другой плоскости разрыва из множества ранее сгенерированных плоскостей разрыва для принятия во внимание информации, сгенерированной посредством обновления первой плоскости разрыва, основываясь на микросейсмическом событии.
2. Способ по п. 1, в котором обновление второй плоскости разрыва включает в себя объединение первой плоскости разрыва и второй плоскости разрыва.
3. Способ по п. 2, содержащий объединение первой плоскости разрыва и второй плоскости разрыва в ответ на определение, что первая плоскость разрыва и вторая плоскость разрыва разделены расстоянием, которое меньше порогового расстояния.
4. Способ по п. 2, содержащий объединение первой плоскости разрыва и второй плоскости разрыва в ответ на определение, что первая плоскость разрыва и вторая плоскость разрыва пересекаются под углом, который меньше порогового угла.
5. Способ по п. 1, в котором микросейсмическое событие содержит первое микросейсмическое событие, причем обновление первой плоскости разрыва вызывает то, что второе другое микросейсмическое событие становится диссоциированным от первой плоскости разрыва, и обновление второй плоскости разрыва содержит:
ассоциирование второго микросейсмического события со второй плоскостью разрыва; и
обновление второй плоскости разрыва, основываясь на втором микросейсмическом событии.
6. Способ по п. 1, в котором микросейсмическое событие содержит первое микросейсмическое событие, причем обновление первой плоскости разрыва вызывает то, что второе другое микросейсмическое событие становится ассоциированным с первой плоскостью разрыва и диссоциированным от второй плоскости разрыва, и обновление второй плоскости разрыва содержит обновление второй плоскости разрыва, основываясь на втором микросейсмическом событии, которое становится диссоциированным от второй плоскости разрыва.
7. Способ по п. 1, в котором информация, генерируемая посредством обновления первой плоскости разрыва, основываясь на микросейсмическом событии, содержит по меньшей мере одно из:
обновленной ориентации первой плоскости разрыва;
обновленного размера первой плоскости разрыва;
обновленного списка неассоциированных микросейсмических событий; или
обновленного списка микросейсмических событий, ассоциированных с первой или второй плоскостью разрыва.
8. Способ по п. 1, в котором первая плоскость разрыва обновляется в ответ на то, что микросейсмическое событие обнаруживается и добавляется в набор микросейсмических данных.
9. Постоянный машиночитаемый носитель, закодированный инструкциями, которые при исполнении устройством обработки данных выполняют операции, содержащие:
обновление первой плоскости разрыва, основываясь на микросейсмическом событии в наборе микросейсмических данных, ассоциированном с обработкой по гидравлическому разрыву пласта, причем первая плоскость разрыва является одной из множества ранее сгенерированных плоскостей разрыва; и
обновление второй другой плоскости разрыва из множества ранее сгенерированных плоскостей разрыва для принятия во внимание информации, сгенерированной посредством обновления первой плоскости разрыва, основываясь на микросейсмическом событии.
10. Машиночитаемый носитель по п. 9, в котором обновление второй плоскости разрыва включает в себя объединение первой
плоскости разрыва и второй плоскости разрыва.
11. Машиночитаемый носитель по п. 10, в котором операции содержат объединение первой плоскости разрыва и второй плоскости разрыва в ответ на определение, что первая плоскость разрыва и вторая плоскость разрыва разделены расстоянием, которое меньше порогового расстояния.
12. Машиночитаемый носитель по п. 10, в котором операции содержат объединение первой плоскости разрыва и второй плоскости разрыва в ответ на определение, что первая плоскость разрыва и вторая плоскость разрыва пересекаются под углом, который меньше порогового угла.
13. Машиночитаемый носитель по п. 9, в котором микросейсмическое событие содержит первое микросейсмическое событие, причем обновление первой плоскости разрыва вызывает то, что второе другое микросейсмическое событие становится диссоциированным от первой плоскости разрыва, и обновление второй плоскости разрыва содержит:
ассоциирование второго микросейсмического события со второй плоскостью разрыва; и
обновление второй плоскости разрыва, основываясь на втором микросейсмическом событии.
14. Машиночитаемый носитель по п. 9, в котором микросейсмическое событие содержит первое микросейсмическое событие, причем обновление первой плоскости разрыва вызывает то, что второе другое микросейсмическое событие становится ассоциированным с первой плоскостью разрыва и диссоциированным от второй плоскости разрыва, и обновление второй плоскости разрыва содержит обновление второй плоскости разрыва, основываясь на втором микросейсмическом событии, которое становится диссоциированным от второй плоскости разрыва.
15. Система анализа микросейсмических данных обработки по гидравлическому разрыву пласта, содержащая:
машиночитаемый носитель, который хранит данные микросейсмического события, ассоциированные с обработкой по гидравлическому разрыву пласта подземной зоны; и
устройство обработки данных, выполненное с возможностью:
обновления устройством обработки данных первой плоскости разрыва, основываясь на микросейсмическом событии, ассоциированным с обработкой по гидравлическому разрыву пласта, причем первая плоскость разрыва является одной из множества ранее сгенерированных плоскостей разрыва; и
обновления второй другой плоскости разрыва из множества ранее сгенерированных плоскостей разрыва для принятия во внимание информации, сгенерированной посредством обновления первой плоскости разрыва, основываясь на микросейсмическом событии.
16. Система по п. 15, в которой обновление второй плоскости разрыва включает в себя объединение первой плоскости разрыва и второй плоскости разрыва.
17. Система по п. 16, в которой устройство обработки данных выполнено с возможностью объединения первой плоскости разрыва и второй плоскости разрыва в ответ на определение, что первая плоскость разрыва и вторая плоскость разрыва разделены расстоянием, которое меньше порогового расстояния.
18. Система по п. 16, в которой устройство обработки данных выполнено с возможностью объединения первой плоскости разрыва и второй плоскости разрыва в ответ на определение, что первая плоскость разрыва и вторая плоскость разрыва пересекаются под углом, который меньше порогового угла.
19. Система по п. 15, в которой микросейсмическое событие содержит первое микросейсмическое событие, причем обновление первой плоскости разрыва вызывает то, что второе другое микросейсмическое событие становится диссоциированным от первой плоскости разрыва, и обновление второй плоскости разрыва содержит:
ассоциирование второго микросейсмического события со второй плоскостью разрыва; и
обновление второй плоскости разрыва, основываясь на втором микросейсмическом событии.
20. Система по п. 15, в которой микросейсмическое событие содержит первое микросейсмическое событие, причем обновление первой плоскости разрыва вызывает то, что второе другое микросейсмическое событие становится ассоциированным с первой
плоскостью разрыва и диссоциированным от второй плоскости разрыва, и обновление второй плоскости разрыва содержит обновление второй плоскости разрыва, основываясь на втором микросейсмическом событии, которое становится диссоциированным от второй плоскости разрыва.
| US 20110120702 A1 , 26.05.2011 | |||
| WO 2011077227 A2 , 30.06.2011 | |||
| WO 2012125558 A2 , 20.09.2012 | |||
| US 7848895 B2 , 07.12.2010 | |||
| US 20110125476 A1 ?, 26.05.2011. |

