Перекрестная ссылка на родственные заявки
По настоящей заявке испрашивается приоритет согласно предварительной заявке США с серийным № 61/710,582, озаглавленной "Identifying Dominant Fracture Orientations" ("Определение преобладающих направлений разрывов"), поданной 5 октября 2012 г., и заявке США с серийным № 13/896,389, озаглавленной "Analyzing Microseismic Data From A Fracture Treatment" ("Анализ микросейсмических данных от операции по разрыву пласта"), поданной 17 мая 2013.
Уровень техники
Это техническое описание относится к анализу микросейсмических данных от операции по разрыву пласта. Микросейсмические данные часто получаются в ассоциации с операциями по гидравлическому разрыву пласта, применяемыми к подземной формации. Операции по гидравлическому разрыву пласта обычно применяются для создания искусственных разрывов в подземной формации и для того, чтобы тем самым улучшить углеводородную продуктивность подземной формации. Давления, генерируемые посредством операции по разрыву пласта, могут вызывать низкоамлитудные или низкоэнергетические сейсмические волны в подземной формации, и волны могут быть обнаружены датчиками и собраны для анализа.
Сущность изобретения
В одном общем аспекте анализируются микросейсмические данные от операции по разрыву пласта. В некоторых случаях данные могут анализироваться в реальном времени, например, в течение операции по разрыву пласта.
В некоторых аспектах данные для новой микросейсмической волны собираются от операции по разрыву пласта подземной зоны. Вычисляется обновленный параметр для плоскости разрыва. Плоскость разрыва была ранее сгенерирована на основе данных для предшествующих микросейсмических волн. Вычисленный обновленный параметр вычисляется на основе данных для новой микросейсмической волны и данных для предшествующих доступных микросейсмических волн. Графическое представление плоскости разрыва (или численное представление параметров плоскости разрыва) отображается на основе обновленного параметра.
Осуществления могут включать в себя один или несколько из следующих признаков. Предшествующее знание или оценки возможных направлений плоскостей разрыва используются для вычисления параметра плоскости разрыва. Графическое представление непрерывно обновляется, например, до тех пор, пока дополнительная новая микросейсмическая волна не возникнет во входном буфере системы. Новые микросейсмические волны собираются от операции по разрыву пласта перед тем, как операция по разрыву пласта начинается, в течение операции по разрыву пласта, после того, как операция по разрыву пласта была прервана, или в любой комбинации перечисленного. Обновленный параметр вычисляется и графическое представление отображается в реальном времени в течение операции по разрыву пласта. Плоскость разрыва выбирается из множества плоскостей разрыва на основе данных для новой микросейсмической волны. Новая микросейсмическая волна ассоциирована с выбранной плоскостью разрыва. Отображение графического представления плоскости разрыва включает в себя обновление графического представления плоскостей разрыва в реальном времени в течение операции по разрыву пласта. Выбор плоскости разрыва из плоскостей разрыва включает в себя определение расстояния между новой микросейсмической волной и выбранной плоскостью разрыва и определение, что расстояние меньше порогового расстояния. Пороговое значение является статическим предварительно определенным значением. Предварительно определенный порог вычисляется путем умножения коэффициента и среднеквадратического отклонения или неопределенности плоскости разрыва. Коэффициент может быть предварительно определенным постоянным значением, например, между 1 и 2, или другим значением.
Дополнительно или в качестве альтернативы эти и другие осуществления могут включать в себя один или несколько из следующих признаков. Вычисление обновленного параметра для плоскости разрыва включает в себя вычисление по меньшей мере одного из обновленного направления или обновленной площади для плоскости разрыва на основе данных для новой микросейсмической волны и данных для предшествующих микросейсмических волн. Вычисление обновленного параметра для плоскости разрыва включает в себя вычисление среднего расстояния от плоскости разрыва для новой микросейсмической волны и предшествующих микросейсмических волн. Новая микросейсмическая волна и предшествующие микросейсмические волны определяют набор. В ответ на обнаружение, что среднее расстояние больше предварительно определенного порогового расстояние, обновленное среднее расстояние вычисляется после удаления одной или нескольких микросейсмических волн из набора.
Дополнительно или в качестве альтернативы эти и другие осуществления могут включать в себя один или несколько из следующих признаков. Вычисление обновленного параметра для плоскости разрыва включает в себя вычисление обновленной площади для плоскости разрыва. Обновленная площадь для плоскости разрыва сравнивается с предшествующей площадью для плоскости разрыва. Новая микросейсмическая волна диссоциируется от плоскости разрыва, если обновленная площадь для плоскости разрыва меньше предшествующей площади для плоскости разрыва. Новая микросейсмическая волна является первой новой микросейсмической волной. После отображения графического представления на основе первой новой микросейсмической волны принимаются данные для второй новой микросейсмической волны, собранные от операции по разрыву пласта. Второй обновленный параметр вычисляется для плоскости разрыва частично на основе данных для второй новой микросейсмической волны. Обновленное графическое представление плоскости разрыва генерируется на основе второго обновленного параметра.
Подробности одного или нескольких осуществлений излагаются на сопроводительных чертежах и в описании ниже. Другие признаки, объекты и преимущества будут очевидны из описания, чертежей и из формулы изобретения.
Описание чертежей
Фиг.1A изображает схему примерной системы скважин; фиг.1B изображает схему примерной вычислительной подсистемы 110 с фиг.1A.
Фиг.2A и 2B изображают чертежи, показывающие примерные плоскости разрыва.
Фиг.3A-3F изображают чертежи, показывающие обновления для примерной плоскости разрыва.
Фиг.4 изображает блок-схему примерной методики для анализа микросейсмических данных.
Подобные ссылочные символы на различных чертежах указывают подобные элементы.
Подробное описание
В некоторых аспектах того, что описано здесь, параметры разрыва, преобладающие направления разрыва или другие данные идентифицируются из микросейсмических данных. В некоторых случаях эти или другие типы данных динамически идентифицируются, например, в реальном времени в течение операции по разрыву пласта. Для многих применений и методик анализа необходима идентификация плоскостей разрыва от микросейсмических волн в реальном времени, и отдельные плоскости разрыва могут отображаться, чтобы показывать время развития и геометрического устранения, включая местоположение, распространение, рост, уменьшение или устранение плоскостей разрыва. Такие возможности могут быть внедрены в системы управления, программные средства, аппаратные средства или инструменты другого типа, доступные инженерам по эксплуатации в области нефти и газа, когда они анализируют потенциальные месторождения нефти и газа, при этом стимулируя гидравлические разрывы и анализируя получаемые в результате сигналы. Такие инструменты могут обеспечивать надежный и непосредственный интерфейс для представления и визуализации динамических свойств гидравлических разрывов, что может помочь при анализе сложности разрыва, сетевой структуры разрывов и геометрии коллектора. Такие инструменты могут помочь при оценке эффективности операции по гидравлическому разрыву пласта, например, путем улучшения, уточнения или оптимизации плотности разрывов, и отслеживать длины и высоты. Такие улучшения в операции по разрыву пласта при применении к коллектору могут улучшить производство углеводородов или других ресурсов из коллектора.
Операции по гидравлическому разрыву пласта могут быть применены в любой подходящей подземной зоне. Операции по гидравлическому разрыву пласта часто применяются в плотных формациях с малопроницаемыми коллекторами, которые могут включать в себя, например, малопроницаемые стандартные коллекторы нефти и газа, непрерывные бассейновые зоны накопления ресурсов и сланцевые газовые коллекторы или формации других типов. Гидравлический разрыв может вызывать искусственные разрывы под поверхностью, которые могут улучшать углеводородную продуктивность коллектора.
В течение применения операции по гидравлическому разрыву пласта закачивание жидкостей под высоким давлением может изменять нагрузки, накапливать нагрузки скалывания и вызывать другие эффекты внутри геологических подповерхностных структур. В некоторых случаях микросейсмические волны ассоциированы с гидравлическими разрывами, вызванными действиями по разрыву. Акустическая энергия или звуки, ассоциированные с нагрузками на породы, деформациями и разрывом, могут быть обнаружены и собраны датчиками. В некоторых случаях микросейсмические волны имеют низкую энергию (например, со значением логарифма интенсивности или моментной магнитуды меньше трех), и некоторую неопределенность или точность или ошибку измерения, ассоциированную с местоположениями волн. Неопределенность может быть описана, например, вытянутым сфероидом, где самая высокая вероятность находится в центре сфероида, а самая низкая вероятность находится на границе.
Построение карты микросейсмической волны может быть использовано для геометрического поиска местоположения точки источника микросейсмических волн на основе обнаруженных продольных и поперечных волн. Обнаруженные продольные и поперечные волны (например, p-волны и s-волны) могут нести дополнительную информацию о микросейсмических волнах, включающую в себя местоположение точки источника, местоположение волны и неопределенность измерения позиции, время возникновения волны, моментную магнитуду волны, направление движения частиц и спектр излучения энергии и, возможно, другое. Микросейсмические волны могут отслеживаться в реальном времени, и в некоторых случаях волны также обрабатываются в реальном времени в течение операции по разрыву пласта. В некоторых случаях после операции по разрыву пласта микросейсмические волны, собранные от операции разрыва, обрабатываются вместе как "данные последствий".
Обработка данных микросейсмической волны, собранных от операции по разрыву пласта, может включать в себя поиск соответствия разрыва (также называемый построением карты разрыва). Процессы поиска соответствия разрыва могут определять плоскости разрыва в любой зоне на основе микросейсмических волн, собранных с зоны. Некоторые примерные вычислительные алгоритмы для поиска соответствия разрыва задействуют данные микросейсмической волны (например, местоположение волны, неопределенность измерения местоположения волны, моментную магнитуду волны и т.д.) для определения отдельных разрывов, которые соответствуют собранному набору микросейсмических волн. Некоторые примерные вычислительные алгоритмы могут вычислять статистические свойства схем разрывов. Статистические свойства могут включать в себя, например, направление разрыва, тенденции направления разрыва, размер разрыва (например, длину, высоту, площадь и т.д.), плотность разрыва, сложность разрыва, свойства сети разрывов и т.д. Некоторые вычислительные алгоритмы учитывают неопределенность в местоположении волн посредством множества осуществлений местоположений микросейсмической волны. Например, альтернативные статистические осуществления, ассоциированные с методом Монте-Карло, могут быть использованы для определенного распределения вероятностей на сфероиде или распределения другого типа.
В общем случае алгоритмы поиска соответствия разрыва могут оперировать с данными реального времени, данными последствий или любой подходящей комбинацией этих и других типов данных. Некоторые вычислительные алгоритмы для поиска соответствия разрыва оперируют только с данными последствий. Алгоритмы, оперирующие с данными последствий, могут быть использованы, когда любое подмножество или несколько подмножеств микросейсмических данных, которые должны быть обработаны, было собранно от операции по разрыву пласта; такие алгоритмы могут осуществлять доступ (например, в качестве исходных входных данных) к полному поднабору микросейсмических волн, которые должны быть обработаны. В некоторых осуществлениях алгоритмы поиска соответствия разрыва могут оперировать с данными реального времени. Такие алгоритмы могут быть использованы для автоматического поиска соответствия разрыва в реальном времени в течение операции по разрыву пласта. Алгоритмы, оперирующие с данными реального времени, могут быть использованы в течение операции по разрыву пласта, и такие алгоритмы могут приспосабливать или динамически обновлять ранее идентифицированную модель разрыва для отражения новых полученных микросейсмических волн. Например, когда микросейсмическая волна обнаруживается и собирается от поля разрыва, автоматический алгоритм поиска соответствия разрыва в реальном времени может реагировать на эту новую волну путем динамического определения и извлечения плоскостей разрыва из уже собранных микросейсмических волн в реальном времени. Некоторые вычислительные алгоритмы для поиска соответствия разрыва могут оперировать с комбинацией данных последствий и данных реального времени.
В некоторых случаях алгоритмы построения карты разрыва конфигурируются для обработки условий, которые возникают при обработке микросейсмических данных в реальном времени. Например, несколько типов трудностей или условий может возникать более преобладающим образом в контексте реального времени. В некоторых случаях методики обработки в реальном времени могут быть выполнены с возможностью учесть (или уменьшить или избежать) более низкую точность, которая иногда ассоциирована с разрывами, извлеченными из наборов данных, где отсутствует достаточное количество микросейсмических волн или отсутствует достаточное количество микросейсмических волн в конкретных частях области. Некоторые методики обработки в реальном времени могут быть выполнены с возможностью производить данные разрыва, которые согласуются с данными разрыва, получаемыми из методики обработки данных последствий. Например, некоторые из примерных методик обработки в реальном времени, описанных здесь, производят результаты, которые статистически те же самые, согласно критерию проверки статистической гипотезы (критерий t и критерий F), что и результаты, производимые посредством методик обработки данных последствий над теми же самыми данными.
В некоторых случаях методики обработки в реальном времени могут быть выполнены с возможностью без задержки (например, мгновенно с точки зрения пользователя) предлагать идентифицированные данные разрыва пользователям. Такие признаки могут обеспечивать возможность инженерам по эксплуатации или операторам динамически получать геометрическую информацию разрыва и регулировать параметры операции по разрыву пласта, когда следует (например, для улучшения, уточнения, оптимизации или другого изменения операции). В некоторых случаях плоскости разрыва динамически извлекаются из микросейсмических данных и отображаются инженерам по эксплуатации в реальном времени. Методики обработки в реальном времени могут демонстрировать высокоскоростное выполнение. В некоторых случаях выполнение может быть улучшено посредством параллельной вычислительной технологии, распределенной вычислительной технологии, подходов с параллельными потоками, быстрых алгоритмов двоичного поиска или комбинации этих и других аппаратных и программных решений, которые способствуют операциям в реальном времени.
В некоторых осуществлениях технология поиска соответствия разрыва может непосредственно представлять информацию о плоскостях разрывов, ассоциированных с трехмерными микросейсмическими волнами. Представленные плоскости разрыва могут представлять сети разрыва, которые демонстрируют множество направлений и активировать комплексные схемы разрыва. В некоторых случаях параметры гидравлического разрыва извлекаются из облака данных микросейсмической волны; такие параметры могут включать в себя, например, тенденции направления разрыва, плотность разрыва и сложность разрыва. Информация параметра разрыва может быть представлена инженерам по эксплуатации или операторам, например, в табличном, численном или графическом интерфейсе или интерфейсе, который комбинирует табличные, численные и графические элементы. Графический интерфейс может быть представлен в реальном времени и может демонстрировать динамики реального времени гидравлических разрывов. В некоторых случаях это может помочь инженерам по эксплуатации анализировать сложность разрыва, сеть разрыва и геометрию коллектора, или это может помочь им лучше понять процесс гидравлического разрыва по мере его развития.
В некоторых осуществлениях значения достоверности точности используются для подсчета надежности плоскостей разрыва, извлеченных из микросейсмических данных. Значения достоверности точности могут быть использованы для классификации разрывов на уровни достоверности. Например, три уровня достоверности (низкий уровень достоверности, средний уровень достоверности и высокий уровень достоверности) подходят для некоторых контекстов, в то время как в других контекстах другое количество (например, два, четыре, пять и т.д.) уровней достоверности могут подходить. Значение достоверности точности плоскости разрыва может быть вычислено на основе любых подходящих данных. В некоторых осуществлениях значение достоверности точности плоскости разрыва вычисляется на основе местоположений и неопределенностей позиций микросейсмических волн, моментной магнитуды отдельных микросейсмических волн, расстояний между отдельными волнами и их вспомогательной плоскостью разрыва, количества вспомогательных волн, ассоциированных с плоскостью разрыва, и веса вариации направления разрыва, помимо прочего.
Значения достоверности точности могут быть вычислены и плоскости разрыва могут быть классифицированы в любой надлежащий момент. В некоторых случаях значения достоверности точности вычисляются и плоскости разрыва классифицируются в реальном времени в течение операции по разрыву пласта. Плоскости разрыва могут быть представлены пользователю в любой надлежащий момент и в любом подходящем формате. В некоторых случаях плоскости разрыва представляются графически в пользовательском интерфейсе в реальном времени согласно значениям достоверности точности, согласно уровням достоверности точности или согласно классификации любого другого типа. В некоторых случаях пользователи могут выбирать отдельные группы или отдельные плоскости (например, те, у которых высокие уровни достоверности) для просмотра или анализа. Плоскости разрыва могут быть представлены пользователю в алгебраическом формате, численном формате, графическом формате или комбинации этих и других форматов.
В некоторых осуществлениях за микросейсмическими волнами осуществляется наблюдение в реальном времени в течение операции по гидравлическому разрыву пласта. Когда за волнами осуществляется наблюдение, они могут также обрабатываться в реальном времени, они могут обрабатываться позже в качестве данных последствий или они могут обрабатываться с использованием комбинации обработки данных реального времени и данных последствий. Волны могут обрабатываться посредством любой подходящей методики. В некоторых случаях волны обрабатываются по отдельности, в то время и в том порядке, в котором они принимаются. Например, состояние системы S(M, N-1) может быть использовано для представления количества M плоскостей, генерируемых от N-1 предыдущих волн. Новая поступающая N-я волна может инициировать систему S(M, N-1). В некоторых случаях при приеме N-й волны генерируется гистограмма или распределение диапазонов направлений. Например, гистограмма распределения вероятностей или гистограмма преобразования Хафа вырождающихся плоскостей в области углов простирания и падения могут генерироваться для определения возможных преобладающих направлений, включенных в наборы разрывов.
Базовая плоскость может генерироваться из поднабора микросейсмических волн. Например, любые три неколлинеарных точки в пространстве математически определяют базовую плоскость. Базовая плоскость, определенная тремя неколлинеарными микросейсмическими волнами, может быть представлена вектором нормали (a, b, c). Вектор нормали (a, b, c) может быть вычислен на основе позиций трех волн. Направление базовой плоскости может быть вычислено из вектора нормали. Например, падение θ и простирание φ могут быть даны следующим образом:

Угол падения θ плоскости разрыва может представлять угол между плоскостью разрыва и горизонтальной плоскостью (например, xy-плоскостью). Угол простирания φ плоскости разрыва может представлять угол между горизонтальной координатной осью (например, осью x) и горизонтальной линией, где плоскость разрыва пересекает горизонтальную плоскость. Например, угол простирания может быть определен относительно севера или другого горизонтального координатного направления. Плоскость разрыва может быть определена другими параметрами, включающими в себя угловые параметры помимо угла простирания и угла падения.
В общем, N волн могут поддерживать P базовых плоскостей, где P=N(N-1)(N-2)/6, углов простирания и падения. Гистограмма вероятностей может быть построена из углов направления. Гистограмма вероятностей или улучшенная гистограмма преобразования Хафа может иметь любую подходящую конфигурацию. Например, конфигурация гистограммы может основываться на фиксированном размере столбиков и фиксированном количестве столбиков, естественном оптимальном размере столбиков в области углов простирания и паления или столбиков других типов. Гистограмма может быть основана на любом подходящем количестве микросейсмических волн (например, десятках, сотнях, тысячах и т.д.), и любом подходящем диапазоне направлений. В некоторых случаях множество дискретных столбиков определяется для гистограммы, и каждый столбик представляет дискретный диапазон направлений. Некоторое количество базовых плоскостей в каждом дискретном диапазоне могут быть вычислено из базовых плоскостей. В некоторых случаях направление каждой базовой плоскости оказывается внутри диапазона направлений, ассоциированного с одним из столбиков. Например, для N микросейсмических волн каждая из P базовых плоскостей может быть назначена столбику, и количество базовых плоскостей, назначенных каждому столбику, может быть вычислено. Количество, вычисленное для каждого столбика, может быть любым подходящим значением. Например, количество может быть ненормализованным количеством базовых плоскостей, количество может быть нормализованной вероятностью, частотой или долей базовых плоскостей или количество может быть значением другого типа, которое подходит для гистограммы. Гистограмма может генерироваться для представления количества базовых плоскостей, назначенных всем из столбиков, или для представления количества базовых плоскостей, назначенных поднабору столбиков.
В некоторых примерах гистограмма представляется в виде трехмерной столбчатой диаграммы, трехмерной карты поверхности или другого подходящего чертежа в надлежащей системе координат. Пики на чертеже гистограммы могут указывать преобладающие направления разрыва. Например, вдоль одной оси гистограмма может представлять углы простирания от 0° до 360° (или другой диапазон), и углы простирания могут разделяться на любое подходящее количество столбиков; вдоль другой оси гистограмма может представлять углы падения от 60° до 90° (или другой диапазон), и углы падения могут разделяться на любое подходящее количество столбиков. Величина (например, вероятность) для каждого столбика может быть представлена вдоль третьей оси на гистограмме. Получающийся в результате чертеж может демонстрировать локальные максимумы (пики). Каждый локальный максимум (пик) может указывать соответственный угол простирания и угол падения, который представляет преобладающее направление разрыва. Например, локальный максимум гистограммы может указывать, что больше базовых плоскостей выровнены вдоль этого направления (или диапазона направлений), чем вдоль соседних направлений, и эти базовые плоскости либо близки к параллельным, либо по существу находятся в одной плоскости.
Диапазон направлений, представленный каждым столбиком в гистограмме, может быть определен посредством любой надлежащей методики. В некоторых случаях каждый столбик представляет предварительно определенный диапазон направлений. Например, может быть использован способ с фиксированным размером столбиков. В некоторых случаях диапазон или размер для каждого столбика вычисляется на основе данных, которые должны быть представлены гистограммой. Например, может быть использован способ с естественным оптимальным размером столбиков. В некоторых случаях направления базовых плоскостей сортируются, и кластеры сортированных направлений идентифицируются. Например, все простирания могут сортироваться в порядке уменьшения или увеличения и затем группироваться в кластеры; подобным образом все значения падения могут сортироваться в порядке уменьшения или увеличения и затем группироваться в кластеры. Кластеры могут быть ассоциированы с двухмерной сеткой, и количество базовых плоскостей в каждой ячейке сетки может быть посчитано. В некоторых случаях эта методика может генерировать адаптивные и динамические кластеры, что приводит к высокоточным значениям для преобладающих направлений. Эта методика и ассоциированные уточнения могут осуществляться с вычислительной сложностью N3log(N). В некоторых случаях размеры столбиков для обоих из простирания и падения фиксированы, и ячейка сетки местоположения каждой базовой плоскости может быть явным образом определена путем ассоциированного простирания и падения с вычислительной сложностью N3.
Плоскости разрыва, ассоциированные с набором микросейсмических волн, могут извлекаться из преобладающих направлений, включенных в данные гистограммы. Базовые плоскости, которые поддерживают преобладающее направление (θ, φ), могут быть либо почти параллельны, либо на одной и той же плоскости. Базовые плоскости, находящиеся внутри одной и той же плоскости, могут быть объединены друг с другом, формируя новую плоскость разрыва с более сильной поддержкой (например, представляющую большее количество микросейсмических волн). Любая подходящая методика может быть использована для объединения плоскостей разрыва. В некоторых случаях для каждого преобладающего направления (θ, φ) строится вектор нормали к плоскости с компонентами (sin θ cos φ, sin θ sin φ, cos θ). В некоторых случаях результаты нечувствительны к местоположению плоскости, и без потери общности плоскость может быть построена из этого вектора нормали (например, предполагая, что начало вектора находится в плоскости). Плоскость может быть описана как x sin θ cos φ+y sin θ sin φ+z cos θ=0. Нормальное расстояние со знаком каждой волны (x0, y0, z0) от базовой плоскости к построенной плоскости может быть представлено как d=-(x0 sin θ sin φ+y0 sin θ sin φ+z0 cos θ). В этом представлении волны с разными знаками d находятся с разных сторон от плоскости.
В некоторых случаях микросейсмические волны группируются в кластеры на основе их расстояния от построенных плоскостей разрыва. Например, кластер волн может содержать группу волн, ближайших к построенной плоскости разрыва. Таким образом, каждый кластер микросейсмических волн может поддерживать конкретную плоскость разрыва. Размер кластера обозначает количество волн, которое содержит кластер. В некоторых случаях ввод пользователя или другие программные данные могут обозначать минимальное количество волн в поддерживаемом кластере. Минимальный размер кластера может зависеть от количества микросейсмических волн в данных. В некоторых случаях минимальный размер кластера должен быть больше или равен трем. Например, кластеры, имеющие размер больше или равный минимальному размеру кластера, могут расцениваться как допустимые плоскости разрыва. Алгоритм подбора может быть применен к значениям местоположения и неопределенности местоположения для волн в каждом кластере для нахождения их соответствующей плоскости разрыва.
Любая подходящая методика может быть использована для определения плоскости разрыва из набора микросейсмических волн. В некоторых случаях используется методика подбора хи-квадрат. Пусть K - наблюдаемые микросейсмические волны, местоположения могут быть представлены как (xi, yi, zi), и их неопределенности измерений могут быть представлены как (σi,x, σi,y, σi,z), где 1≤i≤K. Параметры модели плоскости z=ax+by+c могут быть вычислены, например, путем минимизации оценочной функции хи-квадрат:

Оценочная функция хи-квадрат может быть решена посредством любой подходящей методики. В некоторых случаях решение может быть получено путем решения трех уравнений, которые являются частными производными χ2(a, b, c) по ее переменным, где каждая частная производная приравнена к нулю. В некоторых случаях не существует аналитических решений для этой нелинейной математической системы уравнений. Численные методы (например, численный метод Ньютона, метод Ньютона-Рафсона, метод сопряженных градиентов или другие методики) могут применяться для решения для параметров a, b и c, и углы простирания и падения могут быть вычислены (например, с использованием уравнения (1) выше). Направление преобладающей плоскости разрыва, вычисленное из микросейсмических волн, может быть тем же самым, или оно может быть слегка отличным от, преобладающего направления разрыва, идентифицированного из гистограммы.
В некоторых осуществлениях алгоритм повторяется для всех возможных преобладающих направлений для расширения всех возможных плоскостей разрыва. В некоторых случаях алгоритм повторяется для выбранного поднабора возможных преобладающих направлений. Итерации могут сходиться к плоскостям. Некоторые плоскости могут быть в точности равны друг другу, и некоторые могут быть близки друг к другу. Две плоскости могут считаться "близкими" друг к другу, например, когда среднее расстояние волн одной плоскости от другой плоскости меньше некоторого заданного порога. Пороговое расстояние может обозначаться, например, как управляющий параметр. Алгоритм может объединять близкие плоскости вместе, и вспомогательные волны одной плоскости могут быть ассоциированы с вспомогательными волнами другой объединяемой плоскости(-ей).
В некоторых случаях ограничения накладываются на плоскости разрыва, идентифицированные из микросейсмических данных. Например, в некоторых случаях остаток расстояния волн должен быть меньше некоторого заданного расстояния допуска. Расстояние допуска может быть обозначено, например, как управляющий параметр. В некоторых случаях идентифицированные плоскости разрыва должны быть надлежащим образом усечены для представления конечного размера разрывов. Граница усеченных плоскостей может быть вычислена из позиции вспомогательных волн и неопределенности измерения местоположения волн. Новые плоскости разрыва ограниченного размера могут быть объединены с уже идентифицированными разрывами.
В некоторых случаях новая входящая N-я микросейсмическая волна ассоциируется с плоскостями разрыва, уже идентифицированными на основе предыдущих N-1 микросейсмических волн. При ассоциировании новой волны с существующим разрывом алгоритм может быть использован для обновления существующего разрыва. Например, обновление разрыва может изменять геометрию, местоположение, направление или другие параметры разрыва. При выборе одной из ранее идентифицированных плоскостей разрыва может быть вычислено расстояние плоскости разрыва от новой волны. Если расстояние меньше или равно управляющему параметру расстояния, новая волна может добавляться к вспомогательному набору волн для плоскости разрыва. Если расстояние больше управляющего параметра расстояния, другие ранее идентифицированные плоскости разрыва могут выбираться (например, итерационно или рекурсивно), пока плоскость внутри порогового расстояния не будет найдена. После того как новая волна добавляется к вспомогательному набору для плоскости разрыва, новые значения простирания и падения могут быть оценены и, если необходимо, могут быть повторно вычислены (например, с использованием способа подбора хи-квадрат или другой статистической или детерминистской методики) для плоскости разрыва. Обычно повторное вычисление параметров разрыва вызывает ограниченное изменение в направлении ввиду условного управления расстоянием.
В некоторых случаях, когда новая микросейсмическая волна ассоциируется с плоскостью разрыва, один или несколько параметров (например, остаток расстояния, площадь и т.д.) могут быть модифицированы или оптимизированы. Остаток расстояния плоскости r может представлять среднее расстояние от вспомогательных волн до плоскости. Если остаток расстояния меньше заданного остаточного допуска T, новая волна может помечаться к набору ассоциированных волн для плоскости. В некоторых случаях дополнительный процесс, посредством которого другие ассоциированные волны вспомогательного набора убираются из списка, запускается и прерывается, когда остаток расстояния r оказывается внутри заданного T. Площадь плоскости разрыва может представлять размер плоскости разрыва. Опыт показывает, что обычно новая волна побуждает плоскость разрыва распространяться в длину, расти в высоту или и то, и другое. Таким образом, вычислительные процессы могут быть ограничены условием неуменьшения площади, согласно которому новая площадь плоскости должна вырасти больше или остаться равной площади исходной плоскости (а не уменьшиться), когда новая волна добавляется к плоскости.
Направление плоскости разрыва может представлять угол плоскости разрыва. Например, вектор нормали, углы простирания и падения или другие подходящие параметры могут быть использованы для представления направления плоскости разрыва. Изменение в направлении плоскости разрыва (или другие изменения плоскости разрыва) могут побуждать некоторые ассоциированные вспомогательные волны удаляться из списка ассоциированных волн в список неассоциированных волн на основе их расстояния от обновленной плоскости разрыва. Дополнительно или в качестве альтернативы, изменение в направлении плоскости разрыва может побуждать некоторые ранее неассоциированные волны быть назначенными плоскости разрыва на основе их близости к обновленной плоскости разрыва. Дополнительно, некоторые волны, ассоциированные с ближними плоскостями, могут также быть ассоциированы с текущей плоскостью. Если новая волна ассоциирована с двумя плоскостями разрыва, плоскости разрыва могут пересекать друг друга. В некоторых случаях пересекающиеся плоскости могут быть объединены. Если новая волна не принадлежит к какой-либо существующей плоскости разрыва, она может быть назначена списку "неассоциированных волн".
Накопленные N микросейсмических волн могут расцениваться в любой момент как поднабор окончательного набора волны данных последствий. В таких случаях гистограмма или распределение направлений на основе первых N волн может отличаться от гистограммы или распределения направлений, сконструированных из окончательных данных последствий. Некоторые плоскости разрыва, извлеченные из N микросейсмических волн, могут не быть точными, и эта неточность может уменьшаться, когда время увеличивается, и больше волн накапливается. В качестве примера, точность и достоверность могут быть ниже в исходный момент, когда обнаруженные плоскости разрыва ассоциированы с микросейсмическими волнами, расположенными вблизи ствола скважины. Такие данные могут указывать плоскости разрыва, которые почти параллельны стволу скважины, даже если эти плоскости не представляют реальных разрывов.
Достоверность точности разрыва может быть использована в качестве меры для надежности, ассоциированной с плоскостями разрыва, идентифицированными из микросейсмических данных. В некоторых случаях достоверность точности идентифицируется в реальном времени в течение операции по разрыву пласта. Достоверность точности может быть определена из любых подходящих данных с использованием любых подходящих вычислений. В некоторых случаях на значение достоверности точности для плоскости разрыва влияет количество микросейсмических волн, ассоциированных с плоскостью разрыва. Например, значение достоверности точности может изменять масштаб (например, линейно, нелинейно, экспоненциально, многочленно и т.д.) с количеством микросейсмических волн согласно некоторой функции. Количество микросейсмических волн, ассоциированных с плоскостью разрыва, может быть включено (например, в качестве веса, экспоненты и т.д.) в уравнение для вычисления достоверности точности. В некоторых случаях плоскость разрыва имеет более высокое значение достоверности, когда плоскость разрыва поддерживается большим количеством точек микросейсмических данных (или более низкое значение достоверности, когда плоскость разрыва поддерживается меньшим количеством точек микросейсмических данных).
В некоторых случаях на значение достоверности точности для плоскости разрыва влияет неопределенность местоположения для микросейсмических волн, ассоциированных с плоскостью разрыва. Например, значение достоверности точности может изменять масштаб (например, линейно, нелинейно, экспоненциально, многочленно и т.д.) с неопределенностью местоположения микросейсмической волны согласно некоторой функции. Неопределенность местоположения микросейсмической волны может быть включена (например, в качестве веса, экспоненты или любой убывающей функции от расстояния и т.д.) в уравнение для вычисления достоверности точности. В некоторых случаях плоскость разрыва имеет более высокое значение достоверности, когда плоскость разрыва поддерживается точками микросейсмических данных, имеющих более низкую неопределенность (или более низкое значение достоверности, когда плоскость разрыва поддерживается точками микросейсмических данных, имеющими более высокую неопределенность).
В некоторых случаях на значение достоверности точности для плоскости разрыва влияет моментная магнитуда для микросейсмических волн, ассоциированных с плоскостью разрыва. Например, значение достоверности точности может изменять масштаб (например, линейно, нелинейно, экспоненциально, многочленно и т.д.) с моментной магнитудой микросейсмической волны согласно некоторой функции. Моментная магнитуда микросейсмической волны может быть включена (например, в качестве веса, экспоненты и т.д.) в уравнение для вычисления достоверность точности. Моментная магнитуда для микросейсмической волны может обозначать энергию или интенсивность (иногда пропорциональную квадрату амплитуды) волны. Например, моментная магнитуда для микросейсмической волны может быть значением логарифмического масштаба энергии или интенсивности или значением другого типа, представляющим интенсивность энергии. В некоторых случаях плоскость разрыва имеет более высокое значение достоверности, когда плоскость разрыва поддерживается точками микросейсмических данных, имеющими более высокую интенсивность (или более низкое значение достоверности, когда плоскость разрыва поддерживается точками микросейсмических данных, имеющими более низкую интенсивность).
В некоторых случаях на значение достоверности точности для плоскости разрыва влияет расстояние между плоскостью разрыва и микросейсмическими волнами, ассоциированными с плоскостью разрыва. Например, значение достоверности точности может изменять масштаб (например, линейно, нелинейно, экспоненциально, многочленно и т.д.) со средним расстоянием между плоскостью разрыва и микросейсмическими волнами, вспомогательными для плоскости разрыва. Среднее расстояние может быть задействовано (например, в качестве веса, экспоненты и т.д.) в уравнении для вычисления достоверности точности. В некоторых случаях плоскость разрыва имеет более высокое значение достоверности, когда плоскость разрыва поддерживается точками микросейсмических данных, которые, в среднем ближе к плоскости разрыва (или более низкое значение достоверности, когда плоскость разрыва поддерживается точками микросейсмических данных, которые в среднем дальше от плоскости разрыва).
В некоторых случаях на значение достоверности точности для плоскости разрыва влияет направление плоскости разрыва относительно тенденции преобладающего направления в наборе микросейсмических данных. Например, значение достоверности точности может изменять масштаб (например, линейно, нелинейно, экспоненциально, многочленно и т.д.) с угловой разностью между направлением плоскости разрыва и тенденцией преобладающего направления в микросейсмических данных. Углы направления могут включать в себя простирание, падение или любую подходящую комбинацию (например, трехмерный пространственный угол). Направление может быть задействовано (например, в качестве веса, экспоненты и т.д.) в уравнении для вычисления достоверности точности. Набор микросейсмических данных может иметь одну тенденцию преобладающего направления или он может иметь множество тенденций преобладающих направлений. Тенденции преобладающих направлений могут быть классифицированы, например, как первичные, вторичные и т.д. В некоторых случаях плоскость разрыва имеет более высокое значение достоверности, когда плоскость разрыва выровнена с тенденцией преобладающего направления в наборе микросейсмических данных (или более низкое значение достоверности, когда плоскость разрыва отклоняется от тенденции преобладающего направления в наборе микросейсмических данных).
Значение взвешивания, называемое "вес вариации направления разрыва", может представлять угловую разность между направлением плоскости разрыва и тенденцией преобладающего направления в микросейсмических данных. Вес вариации направления разрыва может быть скалярным значением, которое достигает максимума, когда плоскость разрыва выровнена с тенденцией преобладающего направления. Вес вариации направления разрыва может быть минимальным для направлений разрыва, которые максимально отделены от тенденции преобладающего направления разрыва. Например, когда есть единственная тенденция преобладающего направления разрыва, вес вариации направления разрыва может быть нулевым для разрывов, которые перпендикулярны (или нормальны) преобладающему направлению разрыва. В качестве другого примера, когда существует множество тенденций преобладающего направления разрыва, вес вариации направления разрыва может быть нулевым для разрывов, имеющих направления между преобладающими направлениями разрыва. Вес вариации направления разрыва может быть соотношением направления вычисленной плоскости и направления, отраженного однородным случаем.
В некоторых случаях, когда существует множество тенденций преобладающего направления разрыва, вес вариации направления разрыва имеет одно и то же максимальное значение для каждой тенденция преобладающего направления разрыва. В некоторых случаях, когда существует множество преобладающих направлений разрыва, вес вариации направления разрыва имеет другое локальное максимальное значение для каждого преобладающего направления разрыва. Например, вес вариации направления разрыва может быть 1,0 для разрывов, которые параллельны первой тенденции преобладающего направления разрыва, 0,8 для разрывов, которые параллельны второй тенденции преобладающего направления разрыва, и 0,7 для разрывов, которые параллельны третьей тенденции преобладающего направления разрыва. Вес вариации направления разрыва может уменьшаться до локальных минимумов между тенденциями преобладающего направления разрыва. Например, вес вариации направления разрыва между всеми соседними парами преобладающих направлений разрыва может определять локальный минимум посередине между преобладающими направлениями разрыва или в другой точке между преобладающими направлениями разрыва.
На параметр достоверности точности может влиять неопределенность местоположения вспомогательных микросейсмических волн, моментная магнитуда вспомогательных микросейсмических волн, расстояние между вспомогательными микросейсмическими волнами и плоскостью разрыва, количество вспомогательных волн, ассоциированных с плоскостью, вес вариации направления разрыва, другие значения или любая подходящая комбинация одного или нескольких из перечисленного. В некоторых общих моделях достоверность увеличивается, когда моментная магнитуда больше и когда вариация направления разрыва становится больше, и количество вспомогательных волн больше, и их точность в их местоположении больше, и когда вариация веса как функции от расстояния больше. Эти коэффициенты могут быть использованы в качестве входных данных для определения веса в уравнении для достоверности точности. Например, в некоторых моделях, веса являются линейными или нелинейными функциями от этих коэффициентов, и вес вариации направления разрыва может становится более высоким весом при влиянии на достоверность плоскости. В некоторых примерах достоверность точности вычисляется следующим образом:
Достоверность = (вес вариации направления разрыва) *
Σi=1 количество of волн ((вес неопределенности местоположения) *
(вес моментной магнитуды) *
(вес вариации расстояния)). (3)
Другие уравнения или алгоритмы могут быть использованы для вычисления достоверности.
Идентифицированные плоскости разрыва могут быть классифицированы на уровни достоверности на основе значений достоверности точности плоскостей разрыва. В некоторых случаях используется три уровня: низкий уровень достоверности, средний уровень достоверности и высокий уровень достоверности. Любое подходящее количество уровней достоверности может быть использовано. В некоторых примерах, когда новая волна добавляется к вспомогательному набору, ассоциированному с существующей плоскостью разрыва, его ассоциированный параметр достоверности разрыва может увеличиваться, что может побуждать плоскость разрыва переходить с ее текущего уровня достоверности на более высокий, если он существует. В качестве другого примера, если направление разрыва отклоняется от тенденций направления, демонстрируемых данными последствий микросейсмической волны, когда микросейсмические волны постепенно накапливаются, уменьшение в достоверности разрыва может быть вызвано, главным образом весом вариации направления разрыва, что побуждает плоскость уменьшать свой уровень до более низкого уровня достоверности, если он существует. Это может, в частности, применяться к разрывам, созданным в исходный момент времени операции по гидравлическому разрыву пласта; это может также применяться к разрывам других типов в других контекстах.
Пользователи (например, инженеры по эксплуатации, операционные инженеры и аналитики и другие) могут быть обеспечены графическим отображением плоскостей разрыва, идентифицированных из микросейсмических данных. В некоторых случаях графическое отображение обеспечивает возможность пользователю визуализировать идентифицированные плоскости в реальном времени, на графических панелях, представляющих уровни достоверности. Например, три графических панели могут быть использованы, чтобы отдельно представлять плоскости разрыва низкого уровня достоверности, среднего уровня достоверности и высокого уровня достоверности. В некоторых случаях плоскости разрыва более низкого уровня достоверности создаются в исходные моменты операции по разрыву пласта. В некоторых случаях плоскости разрыва более высокого уровня достоверности распространяются со временем в направлении, близком к перпендикулярному к стволу скважины. По мере того как новые микросейсмические волны постепенно накапливаются со временем, графическое отображение может обновляться, чтобы обеспечить возможность пользователям динамически наблюдать за ассоциацией плоскостей разрыва между уровнями достоверности, ассоциированными с графическими панелями.
Группы уровней достоверности могут быть представлены в качестве чертежей плоскостей разрыва, или группы уровней достоверности могут быть представлены в другом формате. Группы уровней достоверности могут быть представлены алгебраически, например, путем отображения алгебраических параметров (например, параметров для уравнения плоскости) плоскостей разрыва в каждой группе. Группы уровней достоверности могут быть представлены численно, например, путем отображения численных параметров (например, простирания, падения, площади и т.д.) плоскостей разрыва в каждой группе. Группы уровней достоверности могут быть представлены в табличной форме, например, путем представления таблицы алгебраических параметров или численных параметров плоскостей разрыва в каждой группе. Кроме того, плоскость разрыва может быть представлена графически в трехмерном пространстве, двухмерном пространстве или другом пространстве. Например, плоскость разрыва может быть представлена в прямолинейной система координат (например, координаты x, y, z), в полярной системе координат (например, координаты r, θ, φ) или другой системе координат. В некоторых примерах плоскость разрыва может быть представлена в качестве линии в пересечении плоскости разрыва с другой плоскостью (например, линии в xy-плоскости, линии в xz-плоскости, линии в yz-плоскости или линии в любой произвольный плоскости или поверхности).
В некоторых случаях графическое отображение обеспечивает возможность пользователям отслеживать и визуализировать пространственное и временное развитие конкретных плоскостей разрыва, включая их генерирование, распространение и рост. Например, пользователь может наблюдать за этапами пространственного и временного развития конкретной плоскости разрыва, такими как, например, изначальное определение плоскости разрыва на основе трех микросейсмических волн, новая волна, которая изменяет направление плоскости, новая волна, которая побуждает площадь плоскостей расти (например, вертикально, горизонтально или и так, и так), или другие этапы в развитии плоскости разрыва. Пространственное и временное развитие плоскостей разрыва может представлять пути хода активизированных жидкостей и пропантов, введенных в скелет породы. Визуализация динамик плоскостей разрыва может помочь пользователям лучше понять процесс операции по гидравлическому разрыву пласта, анализировать сложность разрыва более точно, оценить эффективность гидравлического разрыва или улучшить производительность скважины.
Хотя эта заявка описывает примеры, задействующие данные микросейсмической волны, методики и системы, описанные в этой заявке, могут применяться к другим типам данных. Например, методики и системы, описанные здесь, могут быть использованы для обработки наборов данных, которые включают в себя элементы данных, которые не относятся к микросейсмическим волнам, которые могут включать в себя другие типы физических данных, ассоциированные с подземной зоной. В некоторых аспектах эта заявка обеспечивает инфраструктуру для обработки больших объемов данных, и инфраструктура может быть выполнена с возможностью различных приложений, которые конкретным образом здесь не описываются. Например, методики и системы, описанные здесь, могут быть использованы для анализа пространственных координат, данных направления или других типов информации, собранной от любого источника. В качестве примера, образцы грунта или камня могут быть собраны (например, в течение бурения), и концентрация некоторого заданного вещества (например, конкретной "соли") в качестве функции от местоположения может быть идентифицирована. Это может помочь геофизикам и операторам оценить геологические слои в почве.
Фиг.1A изображает схематичное представление примерной системы 100 скважин с вычислительной подсистемой 110. Примерная система 100 скважин включает в себя рабочую скважину 102 и наблюдательную скважину 104. Наблюдательная скважина 104 может быть расположена удаленным образом от рабочей скважины 102, возле рабочей скважины 102 или в любом подходящем местоположении. Система 100 скважин может включать в себя одну или несколько дополнительных рабочих скважин, наблюдательных скважин или скважин других типов. Вычислительная подсистема 110 может включать в себя одно или несколько вычислительных устройств или систем, расположенных в рабочей скважине 102, в наблюдательной скважине 104 или в других местоположениях. Вычислительная подсистема 110 или любые из ее компонентов могут быть расположены отдельно от других компонентов, показанных на фиг.1A. Например, вычислительная подсистема 110 может быть расположена в центре обработки данных, вычислительном центре или другом подходящем местоположении. Система 100 скважин может включать в себя дополнительные или другие признаки, и признаки системы скважин могут быть обеспечены так, как показано на фиг.1A, или в любой другой подходящей конфигурации.
Примерная рабочая скважина 102 включает в себя ствол 101 скважины в подземной зоне 121 под поверхностью 106. Подземная зона 121 может включать в себя одну или меньше одной формации породы, или подземная зона 121 может включать в себя больше одной формации породы. В примере, показанном на фиг.1A, подземная зона 121 включает в себя различные подповерхностные слои 122. Подповерхностные слои 122 могут быть определены посредством геологических или других свойств подземной зоны 121. Например, каждый из подповерхностных слоев 122 может соответствовать конкретной литологической разновидности, конкретному содержанию жидкости, конкретному профилю деформирующей силы или давлений или любой другой подходящей характеристике. В некоторых случаях один или несколько из подповерхностных слоев 122 может быть коллектором жидкости, который содержит углеводороды или жидкости других типов. Подземная зона 121 может включать в себя любую подходящую формацию породы. Например, один или несколько из подповерхностных слоев 122 могут включать в себя песчаник, карбонатные материалы, сланец, уголь, аргиллит, гранит или другие материалы.
Примерная рабочая скважина 102 включает в себя рабочую подсистему 120 обработки закачиванием, которая включает в себя автомашины 116 с приборами, насосные агрегаты 114 и другое оборудование. Рабочая подсистема 120 закачивания может применять обработку с закачиванием к подземной зоне 121 через ствол 101 скважины. Обработка с закачиванием может быть операцией по разрыву пласта, который разрывает подземную зону 121. Например, обработка с закачиванием может инициировать, распространять или открывать разрывы в одном или нескольких из подповерхностных слоев 122. Операция по разрыву пласта может включать в себя испытательную миниоперацию по разрыву пласта, обычную или полную операцию по разрыву пласта, последующую операцию по разрыву пласта, повторную операцию по разрыву пласта, заключительную операцию по разрыву пласта или операцию по разрыву пласта другого типа.
При операции по разрыву пласта жидкость для обработки может закачиваться в подземную зону 121 при любых подходящих давлениях жидкости и скоростях потока жидкости. Жидкости могут закачиваться под давлением выше, равным или ниже давления инициации разрыва, выше, равным или ниже давления закрытия разрыва или с любой подходящей комбинацией этих и других давлений жидкости. Давлением инициации разрыва для формации является минимальное давление закачивания жидкости, которое может инициировать или распространять искусственные разрывы в формации. Применение операции по разрыву пласта может инициировать или распространять или не инициировать или распространять искусственные разрывы в формации. Давлением закрытия разрыва для формации является минимальное давление закачивания жидкости, которое может расширять существующие разрывы в подземной формации. Применение операции по разрыву пласта может расширять или не расширять естественные или искусственные разрывы в формации.
Операция по разрыву пласта может быть применена любой надлежащей системой с использованием любой подходящей методики. Насосные агрегаты 114 могут включать в себя передвижные транспортные средства, стационарные установки, полозья, шланги, трубы, емкости или коллекторы для жидкости, насосы, клапаны или другие подходящие структуры и оборудование. В некоторых случаях насосные агрегаты 114 объединены с рабочей колонной, расположенной в стволе 101 скважины. В течение операции насосные агрегаты 114 могут качать жидкость через рабочую колонну в подземную зону 121. Качаемая жидкость может включать в себя жидкость разрыва, пропанты, промывочную жидкость, присадки или другие материалы.
Операция по разрыву пласта может быть применена в единственном местоположении закачивания жидкости или во множестве местоположений закачивания жидкости в подземной зоне, и жидкость может быть закачана в течение единственного периода времени или на протяжении множества различных периодов времени. В некоторых случаях операция по разрыву пласта может использовать множество различных местоположений закачивания жидкости в единственном стволе скважины, множество местоположений закачивания жидкости во множестве различных стволов скважины или любую подходящую комбинацию. Кроме того, операция по разрыву пласта может закачивать жидкость через ствол скважины любого подходящего типа, такого как, например, вертикальные стволы скважины, наклонные стволы скважины, горизонтальные стволы скважины, искривленные стволы скважины или любую подходящую комбинацию этих и других типов.
Операцией по разрыву пласта может управлять любая надлежащая система с использованием любой подходящей методики. Автомашины 116 с приборами могут включать в себя передвижные транспортные средства, стационарные установки или другие подходящие структуры. Автомашины 116 с приборами могут включать в себя систему управления закачиванием, которая наблюдает за и управляет операциями по разрыву пласта, применяемыми подсистемой 120 обработки закачиванием. В некоторых осуществлениях система управления закачиванием может осуществлять связь с другим оборудованием для наблюдения за и управления обработкой закачиванием. Например, автомашины 116 с приборами могут осуществлять связь с насосным агрегатом 114, подповерхностными инструментами и оборудованием наблюдения.
Операция по разрыву пласта, а также другие действия и природные явления, могут генерировать микросейсмические волны в подземной зоне 121, и микросейсмические данные могут быть собраны с подземной зоны 121. Например, микросейсмические данные могут быть собраны одним или несколькими датчиками 112, ассоциированными с наблюдательной скважиной 104, или микросейсмические данные могут быть собраны системами другого типа. Микросейсмическая информация, обнаруженная в системе 100 скважин, может включать в себя акустические сигналы, генерируемые природными явлениями, акустические сигналы, ассоциированные с операцией по разрыву пласта, приложенного через рабочую скважину 102, или сигналы других типов. Например, датчики 112 могут обнаруживать акустические сигналы, генерируемые сходом пород, сдвиганием пород, разрывами пород или другими событиями в подземной зоне 121. В некоторых случаях местоположения отдельных микросейсмических волн могут быть определены на основе микросейсмических данных.
Микросейсмические волны в подземной зоне 121 могут возникать, например, вдоль или возле искусственно образованных гидравлических разрывов. Микросейсмические волны могут быть ассоциированы с уже существующими естественными разрывами или плоскостями гидравлического разрыва, искусственно образованными действиями по разрыву. В некоторых средах большинство обнаруживаемых микросейсмических волн ассоциированы со сдвиговым разрывом породы. Такие волны могут соответствовать или не соответствовать искусственно образованным гидравлическим разрывам растяжения, которые имеют существенное генерирование ширины. На направление разрыва может влиять режим нагрузок, присутствие систем разрыва, которые были сгенерированы в различные моменты в прошлом (например, под тем же самым или другим направлением нагрузки). В некоторых средах более старые разрывы могут быть зацементированы в течение геологического времени и оставаться в качестве плоскости ослабления в породах под поверхностью.
Наблюдательная скважина 104, показанная на фиг.1A, включает в себя ствол 111 скважины в подземной области под поверхностью 106. Наблюдательная скважина 104 включает в себя датчики 112 и другое оборудование, которое может быть использовано для обнаружения микросейсмической информации. Датчики 112 могут включать в себя сейсмоприемники или оборудование для прослушивания других типов. Датчики 112 могут быть расположены на множестве различных позиций в системе 100 скважин. На фиг.1A датчики 112 установлены на поверхности 106 и под поверхностью 106 в стволе 111 скважины. Дополнительно или в качестве альтернативы, датчики могут быть расположены в других местоположениях выше или ниже поверхности 106, в других местоположениях внутри ствола 111 скважины, или внутри другого ствола скважины. Наблюдательная скважина 104 может включать в себя дополнительное оборудование (например, рабочую колонну, пакеры, колонну или другое оборудование), не показанное на фиг.1A. В некоторых осуществлениях микросейсмические данные обнаруживаются посредством датчиков, установленных в рабочей скважине 102 или на поверхности 106, без использования наблюдательной скважины.
В некоторых случаях вся или часть вычислительной подсистемы 110 может содержаться в техническом командном центре на площадке скважины, в центре операций в реальном времени в удаленном местоположении, в другом надлежащем местоположении или в любой подходящей комбинации перечисленного. Система 100 скважин и вычислительная подсистема 110 могут включать в себя или осуществлять доступ к любой подходящей инфраструктуре связи. Например, система 100 скважин может включать в себя множество отдельных линий связи или сеть взаимосоединенных линий связи. Линии связи могут включать в себя проводные или беспроводные системы связи. Например, датчики 112 могут осуществлять связь с автомашинами 116 с приборами или вычислительной подсистемой 110 посредством проводных или беспроводных линий или сетей, или автомашины 116 с приборами могут осуществлять связь с вычислительной подсистемой 110 посредством проводных или беспроводных линий или сетей. Линии связи могут включать в себя общедоступную сеть данных, частную сеть данных, спутниковые линии, специализированные каналы связи, линии дальней связи или любую подходящую комбинацию этих и других линий связи.
Вычислительная подсистема 110 может анализировать микросейсмические данные, собранные в системе 100 скважин. Например, вычислительная подсистема 110 может анализировать данные микросейсмической волны от операции по разрыву пласта подземной зоны 121. Микросейсмические данные от операции по разрыву пласта могут включать в себя данные, собранные до, в течение или после закачивания жидкости. Вычислительная подсистема 110 может принимать микросейсмические данные в любое подходящее время. В некоторых случаях вычислительная подсистема 110 принимает микросейсмические данные в реальном времени (или, по существу, в реальном времени) в течение операции по разрыву пласта. Например, микросейсмические данные могут быть посланы вычислительной подсистеме 110 немедленно при обнаружении датчиками 112. В некоторых случаях вычислительная подсистема 110 принимает некоторые или все из микросейсмических данных после того, как операция по разрыву пласта была завершена. Вычислительная подсистема 110 может принимать микросейсмические данные в любом подходящем формате. Например, вычислительная подсистема 110 может принимать микросейсмические данные в формате, производимом микросейсмическими датчиками или средствами обнаружения, или вычислительная подсистема 110 может принимать микросейсмические данные после того, как микросейсмические данные были форматированы, упакованы или иным образом обработаны. Вычислительная подсистема 110 может принимать микросейсмические данные посредством любого подходящего средства. Например, вычислительная подсистема 110 может принимать микросейсмические данные посредством проводной или беспроводной линии связи, посредством проводной или беспроводной сети или посредством одного или нескольких дисков или других материальных носителей.
Вычислительная подсистема 110 может быть использована для выполнения построения карты разрыва в реальном времени в течение операции по разрыву пласта. Например, вычислительная подсистема 110 может принимать микросейсмические данные в качестве временного ряда отдельных микросейсмических волн, когда операция по разрыву пласта применяется. В любой момент времени вычислительная подсистема 110 может определять плоскости разрыва на основе микросейсмических данных, которые были накоплены к этому моменту. Когда новая микросейсмическая волна обнаруживается, вычислительная подсистема 110 может обновлять ранее сгенерированные плоскости разрыва на основе новой микросейсмической волны. Например, вычислительная подсистема 110 может определять ранее сгенерированную плоскость разрыва, которая наиболее вероятно ассоциирована с новой микросейсмической волной. Ранее сгенерированная плоскость разрыва может быть идентифицирована, например, на основе пространственной близости или других факторов. Новая микросейсмическая волна может комбинироваться с другими микросейсмическими волнами, ассоциированными с ранее сгенерированной плоскостью разрыва, и комбинированный набор микросейсмических волн может быть помещен в плоскость. Различные проверки могут выполняться, например, для улучшения точности результатов. В некоторых случаях обновленная плоскость разрыва может отображаться пользователю в реальном времени, для обеспечения возможности пользователю просматривать рост, распространение или развитие разрывов в подземной зоне.
Некоторые из методик и операций, описанных здесь, могут осуществляться вычислительной подсистемой, сконфигурированной для обеспечения описанных функциональных возможностей. В различных вариантах осуществления вычислительное устройство может включать в себя любые из устройств различных типов, включающих в себя, но не ограниченных перечисленным, персональные компьютерные системы, настольные компьютеры, переносные компьютеры, ноутбуки, компьютерные системы мейнфреймов, карманные компьютеры, рабочие станции, планшеты, серверы приложений, устройства хранения или вычислительное или электронное устройство любого типа.
Фиг.1B изображает схему примерной вычислительной подсистемы 110 с фиг.1A. Примерная вычислительная подсистема 110 может быть расположена в или вблизи одной или нескольких скважин системы 100 скважин или в удаленном местоположении. Вся или часть вычислительной подсистемы 110 может оперировать независимо от системы 100 скважин или независимо от каких-либо других компонентов, показанных на фиг.1A. Примерная вычислительная подсистема 110 включает в себя процессор 160, память 150 и средства 170 управления вводом/выводом, объединенные связью посредством шины 165. Память может включать в себя, например, оперативную память (RAM), устройство хранения (например, постоянную память (ROM) с возможностью перезаписи или другие), жесткий диск или носитель данных другого типа. Вычислительная подсистема 110 может быть предварительно запрограммированной или она может быть программируемой (и перепрограммируемой) путем загрузки программа из другого источника (например, с CD-ROM, с другого компьютерного устройства через сеть данных или другим образом). Средство 170 управления вводом/выводом объединяется с устройствами ввода/вывода (например, монитором 175, мышью, клавиатурой или другими устройствами ввода/вывода) и с линией 180 связи. Устройства ввода/вывода принимают и передают данные в аналоговой или цифровой форме через линии связи, такие как последовательная линия, беспроводная линия (например, инфракрасная, радиочастотная или другие), параллельная линия или линии другого типа.
Линия 180 связи может включать в себя канал связи любого типа, средства подключения, сеть передачи данных или другие линии. Например, линия 180 связи может включать в себя беспроводную или проводную сеть, локальную сеть (LAN), сеть широкого охвата (WAN), частную сеть, общедоступную сеть (такую как Интернет), сеть WiFi, сеть, которая включает в себя спутниковую линию, или сеть передачи данных другого типа.
Память 150 может хранить инструкции (например, компьютерный код), ассоциированные с операционной системой, компьютерные приложения и другие ресурсы. Память 150 может также хранить данные приложений и объекты данных, которые могут быть интерпретированы одним или несколькими приложениями или виртуальными машинами, запущенными на вычислительной подсистеме 110. Как показано на фиг.1B, примерная память 150 включает в себя микросейсмические данные 151, геологические данные 152, данные 153 разрыва, другие данные 155 и приложения 156. В некоторых осуществлениях память вычислительного устройства включает в себя дополнительную или другую информацию.
Микросейсмические данные 151 могут включать в себя информацию о местоположениях микросейсмичностей в подземной зоне. Например, микросейсмические данные могут включать в себя информацию на основе акустических данных, обнаруженных в наблюдательной скважине 104, на поверхности 106, в рабочей скважине 102 или в других местоположениях. Микросейсмические данные 151 могут включать в себя информацию, собранную датчиками 112. В некоторых случаях микросейсмические данные 151 были скомбинированы с другими данными с измененным форматом или иным образом обработанными. Данные микросейсмической волны могут включать в себя любую подходящую информацию, относящуюся к микросейсмическим волнам (местоположения, магнитуды, неопределенности, моменты времени и т.д.). Данные микросейсмической волны могут включать в себя данные, собранные от одной или нескольких операций по разрыву пласта, которые могут включать в себя данные, собранные до, в течение или после закачивания жидкости.
Геологические данные 152 могут включать в себя информацию о геологических свойствах подземной зоны 121. Например, геологические данные 152 могут включать в себя информацию о подповерхностных слоях 122, информацию о стволах 101, 111 скважины или информацию о других атрибутах подземной зоны 121. В некоторых случаях геологические данные 152 включают в себя информацию о литологическом составе, содержании жидкости, профиле нагрузки, профиле давления, пространственной протяженности или других атрибутах одной или нескольких формаций пород в подземной зоне. Геологические данные 152 могут включать в себя информацию, собранную из данных геофизических исследований скважины, образцов породы, выходов на поверхность, микросейсмического получения изображений или других источников данных.
Данные 153 разрыва могут включать в себя информацию о плоскостях разрыва в подземной зоне. Данные 153 разрыва могут определять местоположения, размеры, формы и другие свойства разрывов в модели подземной зоны. Данные 153 разрыва могут включать в себя информацию о естественных разрывах, гидравлически образованные разрывы или любое нарушение непрерывности другого типа в подземной зоне 121. Данные 153 разрыва могут включать в себя плоскости разрыва, вычисленные из микросейсмических данных 151. Для каждой плоскости разрыва данные 153 разрыва могут включать в себя информацию (например, угол простирания, угол падения и т.д.), определяющую направление разрыва, информацию, определяющую форму (например, кривизну, устье и т.д.) разрыва, информацию, определяющую границы разрыва, или любую другую подходящую информацию.
Приложения 156 могут включать в себя программные приложения, скрипты, программы, функции, исполняемые модули или другие модули, которые интерпретируются или исполняются процессором 160. Такие приложения могут включать в себя машиночитаемые инструкции для выполнения одной или нескольких из операций, представленных на фиг.4. Приложения 156 могут включать в себя машиночитаемые инструкции для генерирования пользовательского интерфейса или чертежа, такого как, например, представленные на фиг.2A, 2B, 3A, 3B, 3C, 3D, 3E и 3F. Приложения 156 могут получать входные данные, такие как микросейсмические данные, геологические данные или другие типы входных данных, от памяти 150, от другого локального источника или от одного или нескольких удаленных источников (например, посредством линии 180 связи). Приложения 156 могут генерировать выходные данные и сохранять выходные данные в памяти 150, в другом локальном носителе или в одном или нескольких удаленных устройствах (например, путем посылания выходных данных посредством линии 180 связи).
Процессор 160 может исполнять инструкции, например, для генерирования выходных данных на основе входных данных. Например, процессор 160 может запускать приложения 156 путем исполнения или интерпретирования программных средств, скриптов, программ, функций, исполняемых модулей или других модулей, содержащихся в приложениях 156. Процессор 160 может выполнять одну или несколько из операций, представленных на фиг.4, или генерировать один или несколько из интерфейсов или чертежей, показанных на фиг.2A, 2B, 3A, 3B, 3C, 3D, 3E и 3F. Входные данные, принятые процессором 160, или выходные данные, генерируемые процессором 160, могут включать в себя любые из микросейсмических данных 151, геологических данных 152, данных 153 разрыва или других данных 155.
Фиг.2A и 2B изображают чертежи, показывающие примерные плоскости разрыва. Фиг.2A включает в себя чертеж 200a, показывающий исходную плоскость 208a разрыва, обновленную плоскость 208b разрыва и микросейсмическую волну 206a. Чертеж 200a изображает эффект обновления параметров исходной плоскости 208a разрыва на основе новой микросейсмической волны 206a. В частности, обновление параметров исходной плоскости 208a разрыва генерирует обновленную плоскость 208b разрыва.
Плоскость разрыва может быть представлена в любой подходящей системе координат (например, сферические координаты, прямоугольные координаты и т.д.). Чертеж 200a изображает плоскости разрыва в трехмерной прямолинейной системе координат. На чертеже 200a система координат представлена вертикальной осью 204a и двумя горизонтальными осями 204b и 204c. Вертикальная ось 204a представляет диапазон глубин в подземной зоне; горизонтальная ось 204b представляет диапазон координат "восток-запад"; и горизонтальная ось 204c представляет диапазон координат "север-юг" (все в единицах футов).
Исходная плоскость 208a разрыва и обновленная плоскость 208b разрыва обе представлены прямоугольными двухмерными телами, протягивающимися через трехмерное пространство. Плоскость разрыва может иметь любую другую подходящую геометрию, такую как, например, треугольную, эллипсоидную, трапециевидную, нестандартную геометрию или геометрии другого типа.
Чертеж 200a изображает один пример того, как параметры плоскости разрыва могут обновляться на основе единственной микросейсмической волны. Как показано путем сравнения двух плоскостей разрыва на фиг.2A, обновление исходной плоскости 208a разрыва на основе микросейсмической волны 206a побуждает плоскость разрыва расти в высоту и длину; обновленная плоскость 208b разрыва имеет большую вертикальную и горизонтальную протяженность, чем исходная плоскость 208a разрыва. Следовательно, обновленная плоскость 208b разрыва имеет большую площадь, чем исходная плоскость 208a разрыва. В некоторых случаях обновление плоскости разрыва изменяет плоскость разрыва другим образом.
Фиг.2B включает в себя другой чертеж 200b, изображающий исходную плоскость 208c разрыва, обновленную плоскость 208d разрыва и микросейсмическую волну 206b. Чертеж 200b изображает эффект обновления параметров исходной плоскости 208c разрыва на основе новой микросейсмической волны 206b. В частности, обновление параметров исходной плоскости 208c разрыва генерирует обновленную плоскость 208d разрыва.
Чертеж 200b изображает плоскости разрыва в трехмерной прямолинейной системе координат, представленной вертикальной осью 204d и двумя горизонтальными осями 204e и 204f. Оси на чертеже 200b представляют те же самые параметры, что и оси на чертеже 200a, в другом масштабе. Исходная плоскость 208c разрыва и обновленная плоскость 208d разрыва обе представлены прямоугольными двухмерными зонами, протягивающимися в трехмерной системе координат.
Как показано посредством сравнения двух плоскостей разрыва на фиг.2B, обновление исходной плоскости 208c разрыва на основе микросейсмической волны 206b побуждает плоскость разрыва поворачиваться к новому направлению. Например, обновленная плоскость 208d разрыва имеет направление, отличное от исходной плоскости 208c разрыва относительно вертикальной и горизонтальных осей на чертеже 200b. Соответственно, обновленная плоскость 208d разрыва и исходная плоскость 208c разрыва определяют вектора нормалей, имеющие различные направления (т.е. указывающие в непараллельных направлениях в пространстве).
Фиг.3A-3F изображают чертежи, показывающие обновления для примерной плоскости разрыва. Чертежи изображают примерную временную последовательность для плоскости разрыва. Фиг.3A изображает чертеж 300a исходной плоскости 308a разрыва; каждый последующий чертеж во временной последовательности изображает плоскость разрыва, обновленную на основе новой точки микросейсмических данных. Фиг.3B изображает чертеж 300b первой обновленной плоскости 308b разрыва; фиг.3C изображает чертеж 300c второй обновленной плоскости 308c разрыва; фиг.3D изображает чертеж 300d третьей обновленной плоскости 308d разрыва; фиг.3E изображает чертеж 300e четвертой обновленной плоскости 308e разрыва; и фиг.3F изображает чертеж 300f пятой обновленной плоскости 308f разрыва. На каждом чертеже предыдущая версия плоскости разрыва показана для сравнения. Чертежи на фиг.3A-3F также изображают ствол 310 скважины и микросейсмические волны 306.
Каждый из чертежей 300a, 300b, 300c, 300d, 300e и 300f изображает соответственные плоскости разрыва в трехмерной прямолинейной системе координат, представленной вертикальной осью 304a и двумя горизонтальными осями 304b и 304c. Вертикальная ось 304a представляет диапазон глубин в подземной зоне; горизонтальная ось 304b представляет диапазон координат "восток-запад"; и горизонтальная ось 304c представляет диапазон координат "север-юг" (все в единицах футов). Как показано на чертежах, оси изменяют масштаб для каждого соответственного чертежа. В примерах, показанных на фиг.3A-3F, плоскости разрыва представляются двухмерными прямоугольными зонами, протягивающимися в трехмерной системе координат. Плоскости разрыва могут иметь другие пространственные геометрические характеристики.
Исходная плоскость 308a разрыва и обновленные плоскости 308b, 308c, 308d, 308e и 308f разрыва представляют рост и развитие отдельного разрыва с течением времени. В показанном примере исходная плоскость 308a разрыва идентифицируется, когда 40-я микросейсмическая волна принимается; 87-я микросейсмическая волна инициирует алгоритм обновления. Например, процесс 430, показанный на фиг.4 (или другой процесс), могут быть использованы для обновления плоскости разрыва на основе новой микросейсмической волны. Фиг.3B изображает, что обновление плоскости разрыва на основе 87-й микросейсмической волны изменяет направление плоскости разрыва. В частности, обновление исходной плоскости 308a разрыва на основе 87-й микросейсмической волны побуждает плоскость разрыва повернуться к новому направлению, и первая обновленная плоскость 308b разрыва имеет другое направление относительно исходной плоскости 308a разрыва. Остальные обновления, показанные на фиг.3C-3F, побуждают плоскость разрыва распространяться, и чертежи показывают, как площадь плоскости разрыва увеличивается с течением времени.
Фиг.3C изображает обновление на основе 89-й принятой микросейсмической волны. Обновление первой обновленной плоскости 308b разрыва на основе 89-й микросейсмической волны побуждает плоскость разрыва расти вертикально, и вторая обновленная плоскость 308c разрыва выше, чем первая обновленная плоскость 308b разрыва. Фиг.3D изображает обновление на основе 130-й принятой микросейсмической волны. Обновление второй обновленной плоскости 308c разрыва на основе 130-й микросейсмической волны побуждает плоскость разрыва расти вертикально, и третья обновленная плоскость 308d разрыва выше, чем вторая обновленная плоскость 308c разрыва. Фиг.3E изображает обновление на основе 152-й принятой микросейсмической волны. Обновление третьей обновленной плоскости 308d разрыва на основе 152-й микросейсмической волны побуждает плоскость разрыва расти горизонтально (влево на чертеже), и четвертая обновленная плоскость 308e разрыва длиннее, чем третья обновленная плоскость 308d разрыва. Фиг.3F изображает обновление на основе 157-й принятой микросейсмической волны. Обновление третьей обновленной плоскости 308d разрыва на основе 157-й микросейсмической волны побуждает плоскость разрыва расти горизонтально (вправо на чертеже) и вертикально, и пятая обновленная плоскость 308f разрыва длиннее и выше, чем четвертая обновленная плоскость 308e разрыва.
Фиг.4 изображает блок-схему примерного процесса 430 для анализа микросейсмических данных. Некоторые или все из операций в процессе 430 могут осуществляться одним или несколькими вычислительными устройствами. В некоторых осуществлениях процесс 430 может включать в себя дополнительные, меньше или другие операции, выполняемые в том же самом или другом порядке. Кроме того, одна или несколько из отдельных операций или поднаборов операций в процессе 430 могут выполняться отдельно или в других контекстах. Выходные данные, генерируемые процессом 430, включающие в себя выходные данные, генерируемые промежуточными операциями, могут включать в себя сохраняемую, отображаемую, печатаемую, передаваемую, пересылаемую по связи или обрабатываемую информацию.
В некоторых осуществлениях некоторые или все из операций в процессе 430 исполняются в реальном времени в течение операции по разрыву пласта. Операция может выполняться в реальном времени, например, путем выполнения операции в ответ на прием данных (например, от датчика или системы наблюдения) без существенной задержки. Операция может выполняться в реальном времени, например, путем выполнения операции во время наблюдения за дополнительными микросейсмическими данными от операции по разрыву пласта. Некоторые операции в реальном времени могут принимать входные данные и производить выходные данные в течение операции по разрыву пласта; в некоторых случаях выходные данные делаются доступными пользователю внутри временного кадра, что обеспечивает возможность оператору реагировать на выходные данные, например, путем модификации операции по разрыву пласта.
В некоторых случаях некоторые или все из операций в процессе 430 исполняются динамически в течение операции по разрыву пласта. Операция может исполняться динамически, например, путем итерационного или многократного выполнения операции на основе дополнительных входных данных, например, по мере того как входные данные становятся доступны. В некоторых случаях динамические операции выполняются в ответ на прием данных для новой микросейсмической волны (или в ответ на прием данных для конкретного количества новых микросейсмических волн и т.д.).
На 400 принимаются микросейсмические данные для новой микросейсмической волны. Например, микросейсмические данные могут быть получены путем считывания микросейсмических данных из памяти, путем приема микросейсмических данных от удаленного устройства или другим образом. Микросейсмические данные могут включать в себя информацию об измеренном местоположении новой микросейсмической волны, информацию об измеренной магнитуде новой микросейсмической волны, информацию о неопределенности, ассоциированной с новой микросейсмической волной, или информацию о времени, ассоциированном с новой микросейсмической волной, и т.д. Микросейсмические данные собираются от операции по разрыву пласта. Например, данные микросейсмической волны могут включать в себя микросейсмические данные, собранные в наблюдательной скважине, в рабочей скважине, на поверхности или в других местоположениях в системе скважин. Микросейсмические данные от операции по разрыву пласта могут включать в себя данные для микросейсмических волн, обнаруженных до, в течение или после того, как операция по разрыву пласта применяется. Например, в некоторых случаях микросейсмическое наблюдение начинается до того, как применяется операция по разрыву пласта, заканчивается после того, как применяется операция по разрыву пласта, или и то, и другое.
На 401 выбирается ранее сгенерированная плоскость разрыва. В этом примере плоскость разрыва является "ранее сгенерированной" в том смысле, что она была сгенерирована до того, как данные для новой микросейсмической волны были приняты. В некоторых осуществлениях параметры ранее сгенерированной плоскости разрыва являются параметрами, которые были идентифицированы из микросейсмических данных, собранных до того, как новая микросейсмическая волна была обнаружена. Предшествующие данные микросейсмической волны и новая микросейсмическая волна могут входить в состав набора микросейсмических данных от одной и той же операции по разрыву пласта подземной зоны. В некоторых случаях предшествующие данные микросейсмической волны и новая микросейсмическая волна получаются от различных операций по разрыву пласта.
Плоскости разрыва (например, ранее сгенерированные плоскости разрыва, выбранные на 401) могут быть идентифицированы из микросейсмических данных посредством любой подходящей операции, процесса или алгоритма. Плоскости разрыва могут быть идентифицированы путем вычисления параметров плоскости разрыва, например, из местоположений и других параметров измеренных микросейсмических волн. В некоторых случаях плоскости разрыва идентифицируются в реальном времени в течение операции по разрыву пласта. Примерные методики для определения плоскостей разрыва из микросейсмических данных описаны в предварительной заявке США с серийным № 61/710582, поданной 5 октября 2012 г.
В некоторых случаях, когда данные принимаются на 400, несколько плоскостей разрыва уже были сгенерированы. Например, десятки или сотни плоскостей разрыва могут быть уже идентифицированы из ранее принятых микросейсмических данных. Таким образом, в некоторых случаях конкретная плоскость разрыва выбирается из множества ранее сгенерированных плоскостей разрыва на 401. Например, конкретная плоскость разрыва может быть выбрана из списка ранее сгенерированных плоскостей разрыва на основе индекса, критериев выбора или другой информации.
На 402 вычисляется расстояние между новой микросейсмической волной и выбранной плоскостью разрыва. Расстояние может быть вычислено, например, на основе пространственных координат новой микросейсмической волны и параметров выбранной плоскости разрыва. В некоторых случаях вычисление расстояния может принимать во внимание неопределенность в местоположении микросейсмической волны, неопределенность в местоположении плоскости разрыва или и то, и другое. Другая информация может быть принята во внимание при вычислении расстояния.
На 403 расстояние между новой микросейсмической волной и выбранной плоскостью разрыва сравнивается с управляющим параметром. Управляющим параметром может быть пороговое значение для определения, достаточно ли выбранная плоскость разрыва близка к новой микросейсмической волне, например, для рассмотрения новой микросейсмической волны в качестве вспомогательной волны для выбранной плоскости разрыва. Управляющим параметром может быть ранее назначенное пороговое значение (например, системная константа). Управляющим параметром может быть динамически вычисляемое значение. Например, управляющий параметр может быть вычислен на основе параметров выбранной плоскости разрыва, параметров других ранее сгенерированных плоскостей разрыва или на основе другой информации.
Если расстояние между новой микросейсмической волной и выбранной плоскостью разрыва меньше управляющего параметра, процесс 430 переходит к операции 450. На 450, если существуют другие ранее сгенерированные плоскости разрыва, которые не были выбраны, процесс 430 переходит к операции 401. Соответственно, в некоторых случаях операции 400, 402, 403, 450 и 401 побуждают процесс 430 последовательно выбрать множество других ранее сгенерированных плоскостей разрыва.
Процесс 430 может использовать любой подходящий алгоритм или методику для систематического продвижения через ранее сгенерированные плоскости разрыва. Например, может быть создан индексированный список ранее сгенерированных плоскостей разрыва. Список может сортироваться, например, на основе размера, достоверности, времени или других параметров плоскостей разрыва, или список может быть несортированным. Сохраненные индексы могут быть использованы для систематического выбора другой ранее сгенерированной плоскости разрыва из списка каждый раз, когда исполняется операция 401.
В некоторых случаях ранее сгенерированные плоскости разрыва выбираются последовательно, пока не все ранее сгенерированные плоскости разрыва были выбраны. На 450, если все ранее сгенерированные плоскости разрыва были выбраны, новая микросейсмическая волна обозначается как неассоциированная волна на 460. Таким образом, новая микросейсмическая волна может быть помечена, тегирована или иным образом обозначена как не поддерживающая какую-либо плоскость разрыва.
В некоторых случаях ранее сгенерированные плоскости разрыва выбираются последовательно, пока расстояние между выбранной плоскостью разрыва и новой микросейсмической волной не окажется меньше управляющего параметра. На 403, если расстояние между новой микросейсмической волной и выбранной плоскостью разрыва не менее управляющего параметра, процесс 430 переходит к операции 415. На 415 выбранная плоскость разрыва обновляется на основе новой микросейсмической волны. Операции в пунктирной рамке на фиг.4 представляют примерную методику для обновления плоскости разрыва на основе новой микросейсмической волны. Другие методики могут быть использованы.
На 404 вычисляются параметры выбранной плоскости разрыва. В показанном примере вычисляются направление, площадь и остаток расстояния плоскости разрыва. Площадь плоскости разрыва указывает двухмерный размер плоскости разрыва. Остаток расстояния плоскости разрыва указывает среднее расстояние между плоскостью разрыва и вспомогательными волнами плоскости разрыва.
Направление плоскости разрыва указывает угол плоскости разрыва, например, в установленной системе координат. Направление может определяться, например, посредством конкретных значений угла падения и угла простирания. Новые значения простирания и падения могут быть вычислены на 404 с использованием методики подбора хи-квадрат или других методик. В некоторых случаях изменение в направлении мало, например, ввиду условного управления расстояния.
Параметры выбранной плоскости разрыва могут быть вычислены на основе новой микросейсмической волны и других микросейсмических волн. Например, другими микросейсмическими волнами могут быть предшествующие микросейсмические волны, которые произошли или были обнаружены (или и то, и другое) до новой микросейсмической волны. В некоторых случаях другими микросейсмическими волнами является набор вспомогательных микросейсмических волн, которые были использованы для вычисления ранее сгенерированной плоскости разрыва (т.е. плоскости разрыва, которая была выбрана на 401).
На 405 остаток расстояния сравнивается со значением допуска. Значением допуска может быть пороговое значение для определения, достаточно ли микросейсмические волны, которые были использованы для обновления плоскости разрыва, (в среднем) близки к обновленной плоскости разрыва, например, для рассмотрения новой микросейсмической волны в качестве вспомогательной волны для обновленной плоскости разрыва. Значением допуска может быть ранее назначенное пороговое значение (например, системная константа). Значением допуска может быть динамически вычисляемое значение.
На 405, если остаток расстояния меньше управляющего параметра, процесс 430 переходит к операции 410. На 410 обновленная плоскость разрыва может сохраняться, и новая микросейсмическая волна ассоциируется с обновленной плоскостью разрыва.
На 405, если остаток расстояния меньше управляющего параметра, процесс 430 переходит к операции 406. На 406 остаток расстояния может быть уменьшен посредством диссоциации одной или нескольких микросейсмических волн от выбранной плоскости разрыва. Например, одна или несколько микросейсмических волн, которые находятся на наибольшем расстоянии от обновленной версии выбранной плоскости разрыва, могут быть диссоциированы от плоскости разрыва.
На 407 новые параметры плоскости разрыва вычисляются из микросейсмических волн, оставшихся после того, как одна или несколько микросейсмических волн были диссоциированы на 406. Если остаток расстояния не уменьшился или если остаток расстояния не уменьшился на приемлемую величину (например, менее чем значение допуска или некоторый другой порог), то процесс 430 переходит к операции 460. На 460 новая микросейсмическая волна обозначается как неассоциированная волна на 460. Таким образом, микросейсмическая волна может быть помечена, тегирована или иным образом обозначена как не поддерживающая какую-либо плоскость разрыва. В некоторых случаях выбранная плоскость разрыва может быть восстановлена до ее ранее сгенерированных параметров. Иными словами, если новая микросейсмическая волна обозначена как неассоциированная, обновленные параметры для плоскости разрыва, вычисленные на 404, могут быть отвергнуты.
В некоторых случаях процесс 430 улучшает или оптимизирует остаток расстояния и площадь, когда выбранная плоскость разрыва обновляется на 415. Например, когда остаток расстояния обновленной плоскости разрыва меньше чем значение допуска на 405, новая микросейсмическая волна становится ассоциированной с плоскостью разрыва на 410. В противном случае, другие микросейсмические волны во вспомогательном наборе могут диссоциироваться, пока остаток расстояния не окажется внутри порогового значения. В некоторых случаях изменение направления или размера плоскости разрыва побуждает некоторые микросейсмические волны диссоциироваться от плоскости разрыва. В некоторых случаях изменение направления или размер плоскости разрыва побуждает некоторые микросейсмические волны ассоциироваться с плоскостью разрыва. В некоторых случаях микросейсмическая волна может быть ассоциирована с множеством плоскостей разрыва. Ассоциация микросейсмической волны с множеством плоскостей разрыва может указывать, что плоскости разрыва пересекаются.
Если остаток расстояния был уменьшен на приемлемую величину на 407, то процесс 430 переходит к операции 408. На 408 площадь обновленной плоскости разрыва (после диссоциации одной или нескольких микросейсмических волн на 406) вычисляется. Площадь может быть размером плоскости разрыва, генерируемой от микросейсмических волн, все еще ассоциированных с плоскостью разрыва после того, как волны были диссоциированы на 406. Если размер плоскости разрыва не больше предшествующей площади плоскости разрыва, то процесс 430 переходит к операции 460 (описанной выше). Таким образом, проверка, выполняемая на 408, может обеспечивать то, что ассоциирование новой микросейсмической волны с плоскостью разрыва не вызывает того, что плоскость разрыва уменьшается. Эта проверка может выполняться, например, для введения физических или геологических ограничений в алгоритм поиска соответствия разрыва. Например, проверка может выполняться для отражения знания, что разрывы имеют тенденцию расти (а не уменьшаться) в течение операции по разрыву пласта. Опыт показывает, что новые микросейсмические волны обычно ассоциированы с разрывом, распространяющимся в длину или растущим в высоту. Таким образом, условие неуменьшающейся площади может быть наложено для обеспечения того, что площадь обновленной плоскости разрыва больше или равна площади исходной плоскости. В некоторых средах используются другие предположения.
На 408, если размер плоскости разрыва больше предшествующей площади плоскости разрыва, то процесс 430 переходит к операции 410. На 410 новая микросейсмическая волна ассоциируется с плоскостью разрыва. Если какие-либо микросейсмические волны были диссоциированы на 406, эти микросейсмические волны могут быть обозначены как неассоциированные или они могут быть обработаны другим образом. Примерные методики для обработки диссоциированных микросейсмических волн описаны в предварительной заявке США с серийным № 61/710,582, поданной 5 октября 2012 г. В некоторых случаях обновленные параметры плоскости разрыва (т.е. параметры плоскости разрыва на основе микросейсмических волн, которые остаются ассоциированными после 406) сохраняются в качестве обновленной плоскости разрыва.
Примерный процесс 430 включает в себя проверки, которые могут улучшить точность алгоритма поиска соответствия разрыва. Например, некоторые или все из сравнений на 403, 405, 407 и 408 могут помочь улучшить достоверность того, что обновленная плоскость разрыва соответствует физическому разрыву в подземной зоне. Сравнения могут регулироваться для конкретной среды при необходимости. В некоторых случаях могут осуществляться дополнительные или другие сравнения. Например, в некоторых случаях значение достоверности точности используется для определения, ассоциировать ли новую микросейсмическую волну с плоскостью. Примерные методики для вычисления значения достоверности точности для плоскости разрыва описаны в предварительной заявке США с серийным № 61/710582, поданной 5 октября 2012 г.
В некоторых осуществлениях генерируется графическое представление обновленных плоскостей разрыва. Графическое представление может отображаться, например, для представления обновленной плоскости разрыва в реальном времени в течение операции по разрыву пласта. Графическое представление может включать в себя единственную плоскость разрыва или множество плоскостей разрыва. Графическое представление может включать в себя трехмерное представление плоскости разрыва, трехмерное представление микросейсмических волн, ассоциированных с плоскостью разрыва или комбинацию этих и других признаков. Примеры графического представления плоскости разрыва показаны на фиг.2A, 2B, 3 A, 3B, 3C, 3D, 3E и 3F. Могут быть использованы другие типы графических представлений.
Графическое представление может отображаться на мониторе, экране или устройстве отображения другого типа. В некоторых случаях дисплей обновляется. Например, отображаемое графическое представление может обновляться на основе дополнительных данных микросейсмической волны от операции по разрыву пласта. Отображение (и в некоторых случаях обновление) графического представления может обеспечивать возможность пользователю просматривать динамическое поведение, ассоциированное с операцией по разрыву пласта. В некоторых случаях плоскость разрыва может обновляться, когда дополнительные микросейсмические данные накапливаются, и обновления могут побуждать плоскость разрыва расти или менять направление.
Некоторые варианты осуществления объекта изобретения и операций, описанных в этом техническом описании, могут осуществляться в цифровых электронных цепях или в компьютерных программных средствах, программно-аппаратных средствах или аппаратных средствах, включающих в себя структуры, раскрываемые в этом техническом описании, и их структурные эквиваленты, или в комбинациях одного или нескольких из них. Некоторые варианты осуществления объекта изобретения, описанного в этом техническом описании, могут осуществляться в качестве одной или нескольких компьютерных программ, т.е. одного или нескольких модулей компьютерных программных инструкций, закодированных на компьютерном носителе данных, для исполнения на или для управления операцией устройства обработки данных. Компьютерный носитель данных может являться или может быть включен в машиночитаемое устройство хранения, машиночитаемую основу хранения, оперативный или последовательный запоминающий массив или устройство, или комбинацию одного или нескольких из них. Кроме того, в то время как компьютерный носитель данных не является распространяемым сигналом, компьютерный носитель данных может быть источником или местом назначения компьютерных программных инструкций, закодированных в искусственно генерируемый распространяемый сигнал. Компьютерный носитель данных может также являться или быть включен в один или несколько отдельных физических компонентов или носителей (например, множество CD, дисков или других устройств хранения).
Термин "устройство обработки данных" охватывает все виды аппаратов, устройств и машин для обработки данных, включающих в себя, в качестве примера, программируемый процессор, компьютер, систему на кристалле или на множестве кристаллов или комбинации вышеупомянутого. Устройство может включать в себя специализированные логические цепи, например FPGA (программируемую пользователем вентильную матрицу) или ASIC (специализированную интегральную цепь). Устройство может также включать в себя, дополнительно к аппаратным средствам, код, который создает среду исполнения для описываемой компьютерной программы, например код, который составляет процессорные программно-аппаратные средства, пакет протоколов, систему управления баз данных, операционную систему, межплатформенную среду выполнения, виртуальную машину или комбинацию одного или нескольких из этих элементов. Устройство и среда исполнения могут осуществлять различные инфраструктуры вычислительных моделей, такие как инфраструктуры веб-услуги, распределенного вычисления и сетевого параллельного вычисления.
Компьютерная программа (также известная как программа, программное средство, программное приложение, скрипт или код) может быть написана на языке программирования любой формы, включая компилируемые или интерпретируемые языки, декларативные или процедурные языки. Компьютерная программа может, но не обязательно должна, соответствовать файлу в файловой системе. Программа может сохраняться в части файла, которая содержит другие программы или данные (например, один или несколько скриптов, сохраненных в документе языка разметки), в единственном файле, специализированном для описываемой программы, или во множестве координируемых файлов (например, файлов, которые хранят один или несколько модулей, подпрограмм или частей кода). Компьютерная программа может быть размещена для исполнения на одном компьютере или на множестве компьютеров, которые находятся в одном месте или распределены по множеству мест и взаимосоединены посредством сети связи.
Некоторые из процессов и логических потоков, описанных в этом техническом описании, могут выполняться одним или несколькими программируемыми процессорами, исполняющими одну или несколько компьютерных программ для выполнения действий путем оперирования над входными данными и генерирования выходных данных. Процессы и логические потоки могут также выполняться посредством, и устройство может также осуществляться в качестве, специализированных логических цепей, например, FPGA (программируемой пользователем вентильной матрицы) или ASIC (специализированной интегральной цепи).
Процессоры, подходящие для исполнения компьютерной программы, включают в себя, в качестве примера, как общий, так и специализированный микропроцессоры и процессоры цифрового компьютера любого вида. В общем случае, процессор примет инструкции и данные из постоянной памяти, или оперативной памяти, или обеих. Компьютер включает в себя процессор для выполнения действий в соответствии с инструкциями и одно или несколько устройств памяти для хранения инструкций и данных. Компьютер может также включать в себя или быть операционно объединен для приема данных от или переноса данных к, или и то, и другое, одному или нескольким массовым устройствам хранения для хранения данных, например, магнитных, магнитооптических дисков или оптических дисков. Однако компьютеру не обязательно иметь такие устройства. Устройства, подходящие для хранения компьютерных программных инструкций и данных, включают в себя все формы энергонезависимой памяти, носителей и устройств памяти, включающих в себя, в качестве примера, полупроводниковые устройства памяти (например, EPROM, EEPROM, устройства флэш-памяти и другие), магнитные диски (например, внутренние жесткие диски, сменные диски и другие), магнитооптические диски и диски CD-ROM и DVD-ROM. Процессор и память могут быть дополнены посредством, или встроены в специализированные логические цепи.
Для обеспечения возможности взаимодействия с пользователем, операции могут осуществляться на компьютере, имеющем устройство отображения (например, монитор или устройство отображения другого типа) для отображения информации пользователю и клавиатуру и указывающее устройство (например, мышь, трекбол, планшет, сенсорный экран или указывающее устройство другого типа), посредством которых пользователь может обеспечивать входные данные компьютеру. Другие виды устройств также могут быть использованы для обеспечения возможности взаимодействия с пользователем; например, обратная связь, обеспечиваемая пользователю, может быть сенсорной обратной связью любой формы, например, визуальной обратной связью, звуковой обратной связью или тактильная обратной связью; и входные данные от пользователя могут приниматься в любой форме, включая акустические, речевые или тактильные входные данные. Дополнительно, компьютер может взаимодействовать с пользователем путем посылания документов к и приема документов от устройства, которое используется пользователем; например, путем посылания веб-страниц к обозревателю веб-страниц на пользовательском клиентском устройстве в ответ на запросы, принятые от обозревателя веб-страниц.
Клиент и сервер в общем случае удалены друг от друга и обычно взаимодействуют через сеть связи. Примеры сетей связи включают в себя локальную сеть ("LAN") и широкомасштабную сеть ("WAN"), объединяющую сеть (например, Интернет), сеть, содержащую спутниковую линию, и равноранговые сети (например, специально созданные равноранговые сети). Отношения клиента и сервера возникают посредством компьютерных программ, запущенных на соответственных компьютерах и имеющих клиент-серверные отношения друг с другом.
В некоторых аспектах того, что описано здесь, преобладающие направления, включенные в наборы разрывов, ассоциированных с микросейсмическими волнами, могут динамически идентифицироваться в течение операции по разрыву пласта. Например, плоскости разрыва могут извлекаться из микросейсмических волн реального времени, собранных с месторождения. Плоскости разрыва могут быть идентифицированы на основе информации микросейсмических волн, включающей в себя: местоположения волн, неопределенности измерений местоположения волн, моментные магнитуды волн, моменты времени возникновения волн и другое. В каждый момент времени данные могут быть ассоциированы с ранее вычисленными базовыми плоскостями, включающими в себя микросейсмический вспомогательный набор волн.
В некоторых аспектах того, что описано здесь, гистограмма или распределение вероятностей базовых плоскостей могут быть сконструированы из собранных микросейсмических волн, и гистограмма или распределение могут быть использованы для выведения преобладающих направлений разрыва. Разрывы, извлеченные вместе с преобладающими направлениями, могут в некоторых случаях обеспечивать оптимальное соответствие с микросейсмическими волнами в реальном времени. Гистограмма или распределение и преобладающие направления могут иметь существенную чувствительность к новой входящей микросейсмической волне. Таким образом, некоторые плоскости, идентифицированные в течение времени, когда микросейсмические данные ассимилируются, могут не быть точными при сравнении с результатами данных последствий микросейсмической волны. Примеры методик для генерирования, обновления и использования гистограмм на основе микросейсмических данных описаны в предварительной заявке США с серийным № 61/710582, поданной 5 октября 2012 г.
В некоторых аспектах того, что описано здесь, параметр достоверности точности может обеспечивать меру для точности идентифицированных плоскостей в реальном времени. Факторы, влияющие на достоверность точности плоскости, могут включать в себя собственные свойства волн, отношение между вспомогательными волнами и плоскостью и вес, отражающий тенденции направления разрыва данных последствий микросейсмической волны. В некоторых случаях плоскости разрыва с высокой достоверностью в конце операции по гидравлическому разрыву пласта, которые были идентифицированы в реальном времени, согласуются с теми, которые получены из данных последствий волны.
В некоторых аспектах некоторые или все из признаков, описанных здесь, могут комбинироваться или осуществляться отдельно в одном или нескольких единицах программных средств для автоматизированного построения карты разрыва в реальном времени. Программные средства могут осуществляться в качестве компьютерного программного продукта, установленного приложения, клиент-серверного приложения, Интернет-приложения или программных средств любого другого подходящего типа. В некоторых случаях программа автоматизированного построения карты разрыва в реальном времени может динамически показывать пользователям пространственное и временное развитие идентифицированных плоскостей разрыва в реальном времени по мере того, как микросейсмические волны постепенно накапливаются. Динамические свойства могут включать в себя, например, генерирование новых разрывов, распространение и рост существующих разрывов или другие динамические свойства. В некоторых случаях программа автоматизированного построения карты разрыва в реальном времени может обеспечивать пользователям возможность просматривать идентифицированные плоскости разрыва в реальном времени на множестве уровней достоверности. В некоторых случаях пользователи могут наблюдать за пространственным и временным развитием разрывов высокого уровня достоверности, которые могут демонстрировать преобладающие тенденции общих данных микросейсмической волны. В некоторых случаях программа автоматизированного построения карты разрыва в реальном времени может оценивать достоверность точности разрыва, например, для измерения надежности идентифицированных плоскостей разрыва. Значения достоверности точности могут, например, помочь пользователям лучше понимать и анализировать изменения в гистограмме вероятностей или распределение направлений, которые могут непрерывно варьироваться с накапливанием микросейсмических волн в реальном времени. В некоторых случаях программа автоматизированного построения карты разрыва в реальном времени может обеспечивать результаты, которые согласуются с построением карты разрыва на основе данных последствий. Например, в конце операции по гидравлическому разрыву пласта результаты, производимые программой автоматизированного построения карты разрыва в реальном времени, могут статистически согласовываться с теми, которые получены программой автоматизированного построения карты разрыва на основе данных последствий, оперирующей над теми же самыми данными. Такие признаки могут обеспечивать возможность инженерам по эксплуатации, операторам и аналитикам динамически визуализировать и отслеживать пространственное и временное развитие гидравлических разрывов для анализа сложности разрыва и геометрии коллектора, для оценки эффективности операции по гидравлическому разрыву пласта и для улучшения производительности скважины.
Хотя это техническое описание содержит множество подробностей, их следует трактовать не как ограничения объема того, что может быть описано в формуле изобретения, а скорее как описания признаков, характерных для конкретных примеров. Конкретные признаки, которые описаны в этом техническом описании в контексте отдельных осуществлений, могут также комбинироваться. И наоборот, различные признаки, которые описаны в контексте единственного осуществления, могут также осуществляться во множестве вариантов осуществления отдельно или в любой подходящей подкомбинации.
Было описано некоторое количество вариантов осуществления. Тем не менее, следует понимать, что могут быть сделаны различные модификации. Соответственно, другие варианты осуществления находятся внутри объема следующей формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСПРОСТРАНЯЮЩИЕСЯ ОБНОВЛЕНИЯ ПЛОСКОСТИ РАЗРЫВА | 2013 |
|
RU2594372C1 |
| ИДЕНТИФИКАЦИЯ ПРЕОБЛАДАЮЩИХ ОРИЕНТАЦИЙ ТРЕЩИН | 2013 |
|
RU2594373C1 |
| ИДЕНТИФИКАЦИЯ КЛАСТЕРОВ ОРИЕНТАЦИИ ПО МИКРОСЕЙСМИЧЕСКИМ ДАННЫМ | 2013 |
|
RU2601535C1 |
| ОБНОВЛЕНИЕ МИКРОСЕЙСМИЧЕСКИХ ГИСТОГРАММНЫХ ДАННЫХ | 2013 |
|
RU2605192C2 |
| ГЕОМЕТРИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ ПЛОСКОСТЕЙ РАЗВИТИЯ ТРЕЩИН | 2013 |
|
RU2592751C1 |
| УПРАВЛЕНИЕ МИКРОСЕЙСМИЧЕСКИМИ ДАННЫМИ ДЛЯ ОТСЛЕЖИВАНИЯ ТРЕЩИН | 2013 |
|
RU2602403C1 |
| ОПРЕДЕЛЕНИЕ ДОВЕРИТЕЛЬНОГО ЗНАЧЕНИЯ ДЛЯ ПЛОСКОСТИ РАЗВИТИЯ ТРЕЩИНЫ | 2013 |
|
RU2602760C1 |
| ИДЕНТИФИКАЦИЯ ПЛОСКОСТЕЙ РАЗРЫВА ИЗ МИКРОСЕЙСМИЧЕСКИХ ДАННЫХ | 2013 |
|
RU2594369C1 |
| АНАЛИЗ СТРАТИГРАФИИ ТРЕЩИН | 2013 |
|
RU2599914C1 |
| ОБНАРУЖЕНИЕ И ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЙ МИКРОСЕЙСМИЧЕСКИХ СОБЫТИЙ ПУТЕМ НЕПРЕРЫВНОЙ КАРТОГРАФИЧЕСКОЙ МИГРАЦИИ | 2005 |
|
RU2411544C2 |
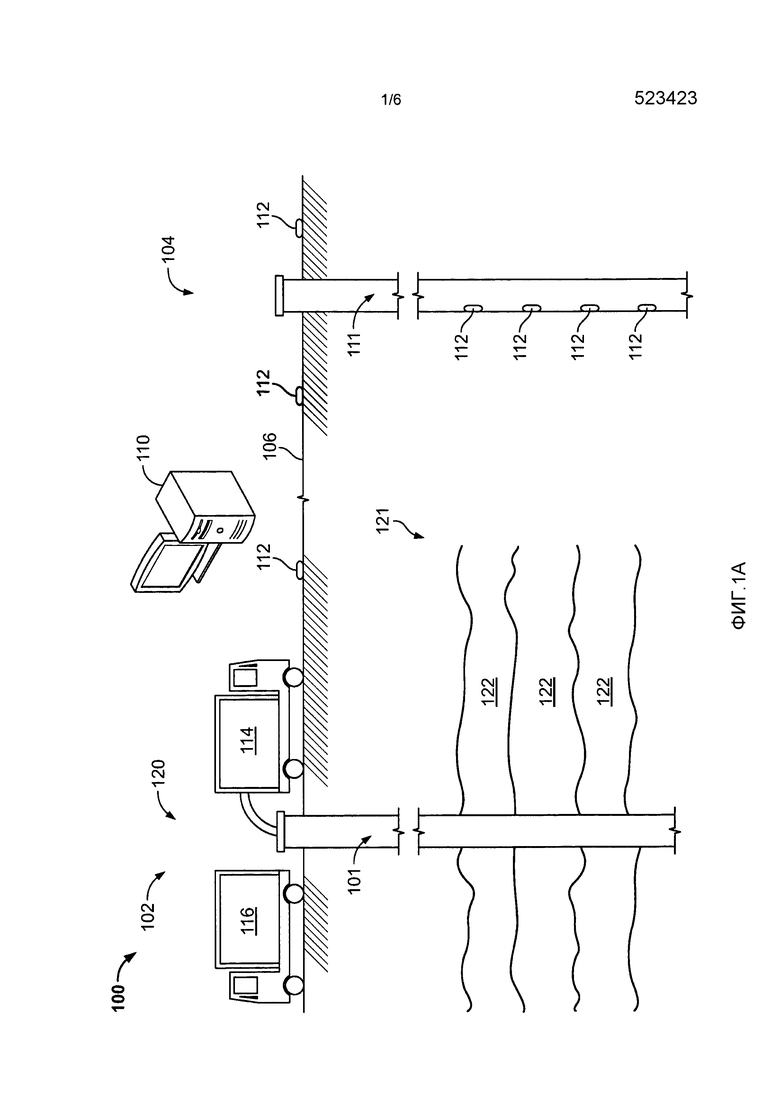
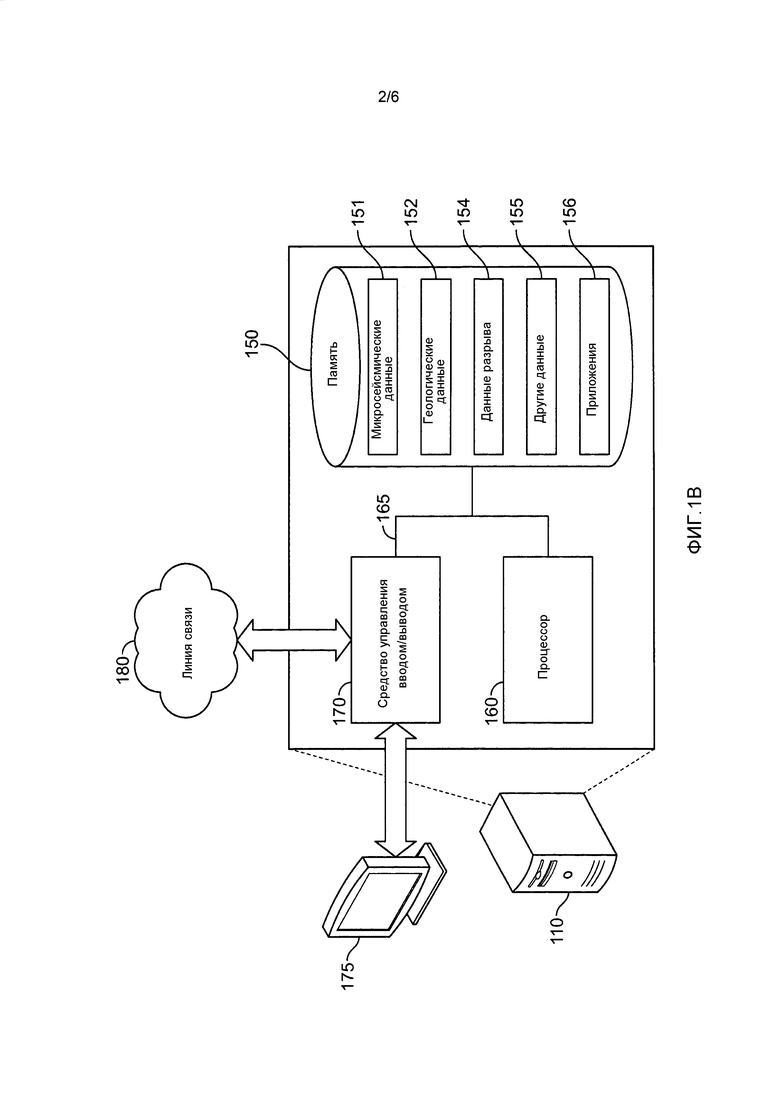

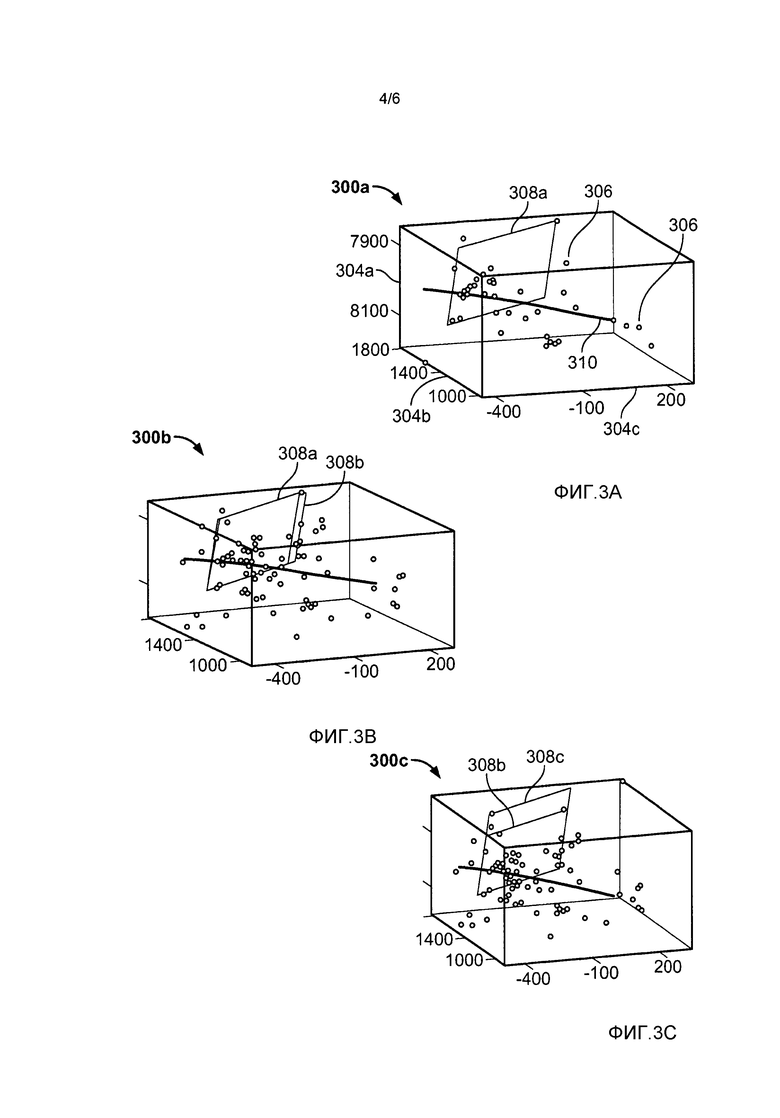

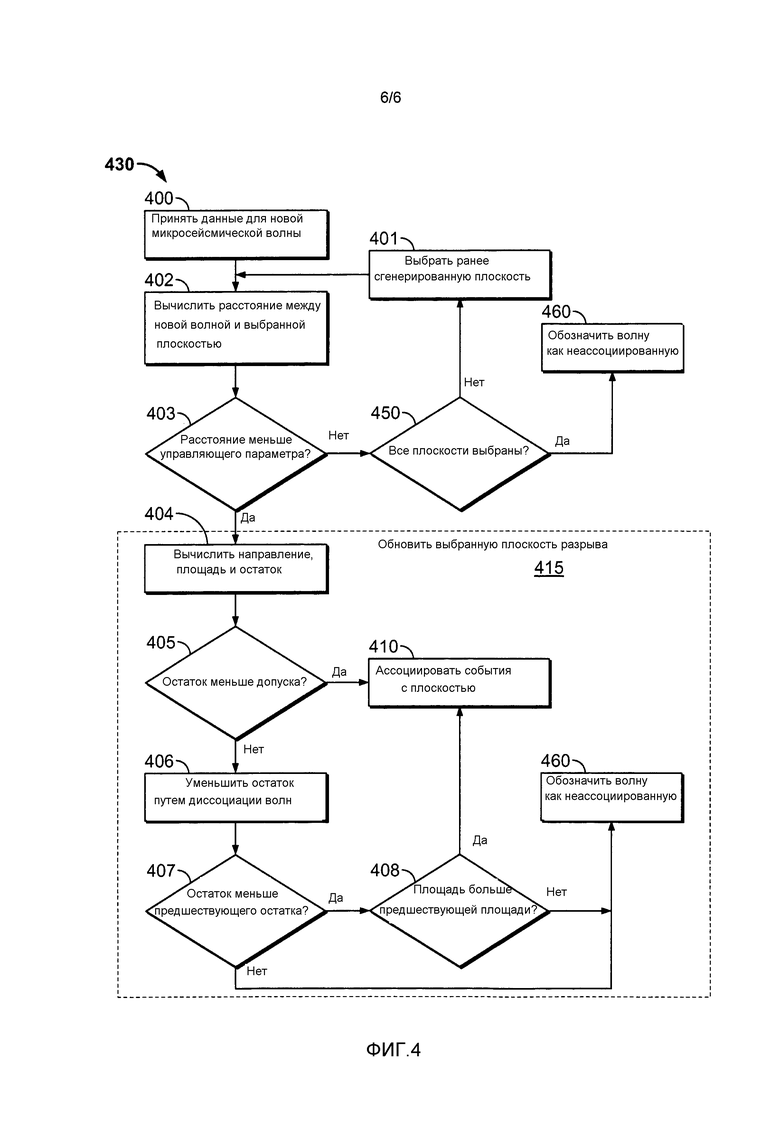
Изобретение относится к области геофизики и может быть использовано для отслеживания трещин в процессе гидроразрыва пласта. Предложенные система, способ и программные средства могут быть использованы для анализа микросейсмических данных от операции по разрыву пласта. В некоторых аспектах данные для новой микросейсмической волны являются данными от операции по разрыву пласта подземной зоны. Вычисляется обновленный параметр для плоскости разрыва. Плоскость разрыва была ранее сгенерирована на основе данных для предшествующих микросейсмических волн. Вычисленный обновленный параметр вычисляется на основе данных для новой микросейсмической волны и данных для предшествующих микросейсмических волн. Графическое представление плоскости разрыва отображается на основе обновленного параметра. Технический результат - повышение точности и достоверности информации относительно пространственно геометрических характеристик трещин гидроразрыва пласта. 3 н. и 19 з.п. ф-лы, 11 ил.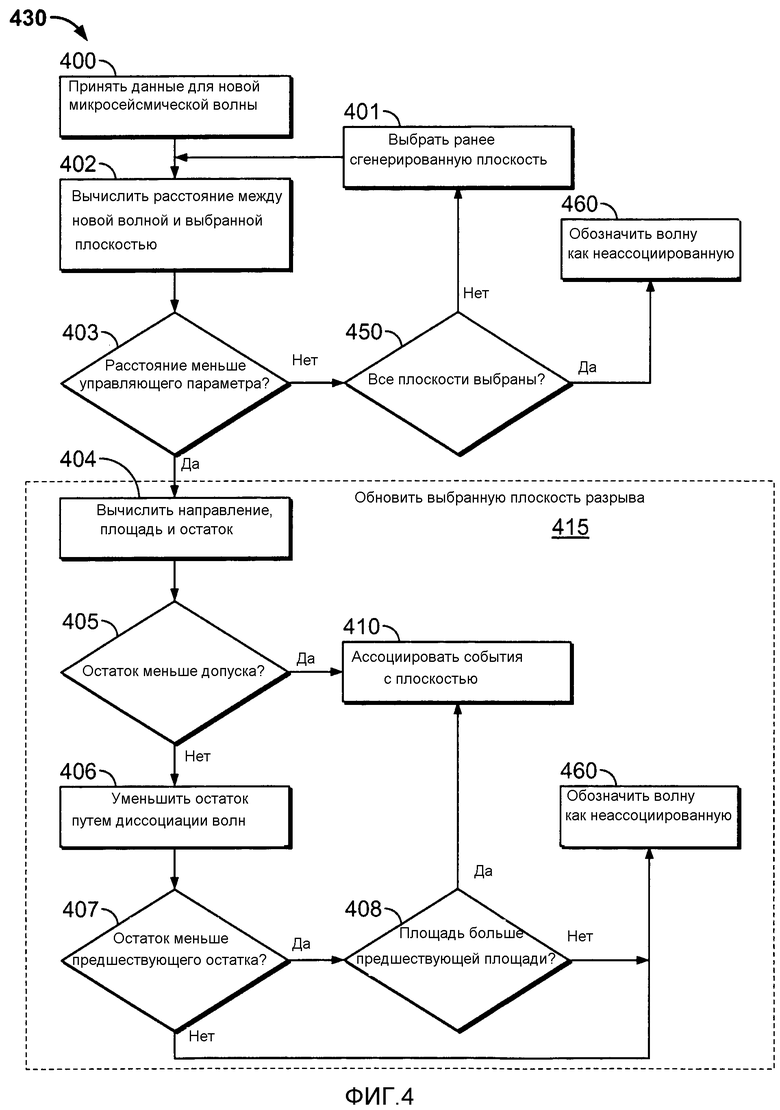
1. Компьютерно-реализованный способ для анализа микросейсмических данных от операции по разрыву пласта, причем способ содержит этапы, на которых:
принимают данные для новой микросейсмической волны, ассоциированной с операцией по разрыву пласта подземной зоны;
вычисляют посредством устройства обработки данных обновленный параметр для плоскости разрыва, причем плоскость разрыва является ранее сгенерированной на основе данных для предшествующих микросейсмических волн, причем обновленный параметр вычисляется на основе данных для новой микросейсмической волны и данных для предшествующих микросейсмических волн и
отображают графическое представление плоскости разрыва на основе обновленного параметра.
2. Способ по п. 1, в котором обновленный параметр вычисляется, и графическое представление отображается в реальном времени в течение операции по разрыву пласта.
3. Способ по п. 1, дополнительно содержащий этапы, на которых:
выбирают плоскость разрыва из множества плоскостей разрыва на основе данных для новой микросейсмической волны и
ассоциируют новую микросейсмическую волну с выбранной плоскостью разрыва.
4. Способ по п. 3, в котором отображение графического представления плоскости разрыва включает в себя обновление графического представления множества плоскостей разрыва в реальном времени в течение операции по разрыву пласта.
5. Способ по п. 3, в котором выбор плоскости разрыва из множества плоскостей разрыва включает в себя этапы, на которых:
определяют расстояние между новой микросейсмической волной и плоскостью разрыва и
определяют, что расстояние меньше порогового расстояния.
6. Способ по п. 5, дополнительно содержащий этап, на котором вычисляют пороговое расстояние путем умножения предварительно определенного коэффициента на среднеквадратическое отклонение микросейсмических волн, ассоциированных с плоскостью разрыва.
7. Способ по п. 1, в котором вычисление обновленного параметра для плоскости разрыва включает в себя вычисление по меньшей мере одного из обновленного направления или обновленной площади для плоскости разрыва на основе данных для новой микросейсмической волны и данных для предшествующих микросейсмических волн.
8. Способ по п. 1, в котором вычисление обновленного параметра для плоскости разрыва включает в себя вычисление среднего расстояния от плоскости разрыва для новой микросейсмической волны и предшествующих микросейсмических волн.
9. Способ по п. 8, в котором новая микросейсмическая волна и предшествующие микросейсмические волны определяют набор, и способ дополнительно содержит этапы, на которых:
обнаруживают, что среднее расстояние больше предварительно определенного порогового расстояния, и
вычисляют обновленное среднее расстояние после удаления одной или нескольких микросейсмических волн из набора.
10. Способ по п. 1, в котором вычисление обновленного параметра для плоскости разрыва включает в себя этап, на котором вычисляют обновленную площадь для плоскости разрыва, и способ дополнительно содержит этапы, на которых:
сравнивают обновленную площадь для плоскости разрыва с предшествующей площадью для плоскости разрыва и
диссоциируют новую микросейсмическую волну от плоскости разрыва, если обновленная площадь для плоскости разрыва меньше предшествующей площади для плоскости разрыва.
11. Способ по п. 1, дополнительно содержащий этапы, на которых:
определяют одну или несколько микросейсмических волн, которые находятся на большем расстоянии, чем пороговое расстояние, от плоскости разрыва и
диссоциируют идентифицированные микросейсмические волны от плоскости разрыва.
12. Способ по п. 1, в котором новая микросейсмическая волна
содержит первую новую микросейсмическую волну, причем способ дополнительно содержит этапы, на которых:
после отображения графического представления на основе первой новой микросейсмической волны принимают данные для второй новой микросейсмической волны от операции по разрыву пласта;
вычисляют второй обновленный параметр для плоскости разрыва частично на основе данных для второй новой микросейсмической волны и
отображают графическое представление плоскости разрыва на основе второго обновленного параметра.
13. Некратковременный машиночитаемый носитель, закодированный с инструкциями, которые при исполнении устройством обработки данных выполняют операции, содержащие этапы, на которых:
принимают данные для новой микросейсмической волны, ассоциированной с операцией по разрыву пласта подземной зоны;
вычисляют обновленный параметр для плоскости разрыва, причем плоскость разрыва ранее сгенерирована на основе данных для предшествующих микросейсмических волн, причем обновленный параметр вычисляется на основе данных для новой микросейсмической волны и данных для предшествующих микросейсмических волн и
генерируют графическое представление плоскости разрыва на основе обновленного параметра.
14. Машиночитаемый носитель по п. 13, в котором обновленный параметр вычисляется и графическое представление генерируется в реальном времени в течение операции по разрыву пласта.
15. Машиночитаемый носитель по п. 13, в котором операции дополнительно содержат этапы, на которых:
выбирают плоскость разрыва из множества плоскостей разрыва на основе данных для новой микросейсмической волны и
ассоциируют новую микросейсмическую волну с выбранной плоскостью разрыва.
16. Машиночитаемый носитель по п. 13, в котором вычисление обновленного параметра для плоскости разрыва включает в себя этап, на котором вычисляют по меньшей мере одно из обновленного направления или обновленной площади для плоскости разрыва на основе данных для новой микросейсмической волны и данных для предшествующих микросейсмических волн.
17. Машиночитаемый носитель по п. 13, в котором вычисление обновленного параметра для плоскости разрыва включает в себя вычисление среднего расстояния от плоскости разрыва для новой микросейсмической волны и предшествующих микросейсмических волн.
18. Система анализа микросейсмических данных от операции по разрыву пласта, содержащая:
устройство обработки данных с возможностью операции для того, чтобы
принимать данные для новой микросейсмической волны, ассоциированной с операцией по разрыву пласта подземной зоны, и
вычислять обновленный параметр для плоскости разрыва, причем плоскость разрыва ранее сгенерирована на основе данных для предшествующих микросейсмических волн, причем обновленный параметр вычисляется на основе данных для новой микросейсмической волны и данных для предшествующих микросейсмических волн; и
устройство отображения с возможностью операции для того, чтобы отображать графическое представление плоскости разрыва на основе обновленного параметра.
19. Система по п. 18, дополнительно содержащая интерфейс связи с возможностью операции для того, чтобы принимать данные микросейсмической волны от одного или нескольких датчиков, ассоциированных с подземной зоной.
20. Система по п. 18, в которой обновленный параметр вычисляется и графическое представление отображается в реальном времени в течение операции по разрыву пласта.
21. Система по п. 18, в которой устройство обработки данных дополнительно имеет возможность операции для того, чтобы
выбирать плоскость разрыва из множества плоскостей разрыва на основе данных для новой микросейсмической волны и
ассоциировать новую микросейсмическую волну с выбранной плоскостью разрыва.
22. Система по п. 18, в которой вычисление обновленного параметра для плоскости разрыва включает в себя вычисление по меньшей мере одного из обновленного направления или обновленной площади для плоскости разрыва на основе данных для новой микросейсмической волны и данных для предшествующих микросейсмических волн.
| US 20110120702 A1, 26.05.2011;WO 2011077227 A2, 30.06.2011;WO 2012125558 A2, 20.09.2012;US 7848895 B2, 07.12.2010 ;US 20110125476 A1 ;, 26.05.2011. |

