Настоящее изобретение относится к коммутационному устройству с электромагнитным приводом для низко- или средневольтных применений, например, для выключателя, контактора, разъединителя, устройства автоматического повторного включения (АПВ) и т.п.
В другом аспекте настоящее изобретение относится к способу управления коммутационными операциями (то есть операциями замыкания или размыкания электрических контактов) упомянутого коммутационного устройства.
Для целей настоящего изобретения термины низкое напряжение (LV) или среднее напряжение (MV) обозначают напряжения, имеющие значения, соответственно, меньше 1 кВ и от 1 кВ до нескольких десятков кВ, например, 50 кВ.
Как известно, коммутационное устройство LV или MV обычно содержит блок управления и приводную цепь для соединения или разъединения электрических контактов во время коммутационной операции коммутационного устройства.
Большинство традиционных коммутационных устройств, как правило, являются устройствами механического типа, то есть, обеспечены приводной цепью, которая использует механическое устройство для приведения в действие мобильного контакта коммутационного устройства.
Совсем недавно на рынке были представлены коммутационные устройства с электромагнитным приводом.
Эти устройства содержат электромагнитный привод для приведения в действие подвижного контакта, который, как правило, содержит магнитную цепь, снабженную катушкой возбуждения, функционально связанную с подвижным сердечником, который механически соединен с подвижным контактом.
Средство электропитания также выполнено с возможностью получения электроэнергии от энергораспределительной линии для подачи тока возбуждения в катушку возбуждения.
Как правило, как только команда на коммутацию (то есть команда на замыкание или размыкание) принята, блок управления отправляет управляющие сигналы средству электропитания, чтобы отдать ему команду подавать ток возбуждения в течение заранее заданного времени.
Магнитное поле, генерируемое током возбуждения, циркулирующим в катушке возбуждения, управляет подвижным сердечником, который может обратимо перемещаться между двумя рабочими положениями, каждое из которых соответствует положению соединения или разъединения электрических контактов.
Широко признается, что коммутационные устройства электромагнитного типа представляли значительное улучшение существующего уровня техники.
Тем не менее, они все еще имеют некоторые недостатки.
Практика показала, что во время коммутационной операции подвижный сердечник аккумулирует относительно высокую кинетическую энергию, которая передается остальным частям приводной цепи, когда подвижный сердечник прекращает свое движение.
Часто это вызывает выход за пределы или явление отскока электрических контактов с последующим уменьшением безопасности и надежности коммутационных операций.
Кроме того, приводная цепь подвергается соответствующим механическим напряжениям и вибрациям, которые часто приводят к быстрому возникновению явления износа.
Таким образом, необходимы частые вмешательства для обслуживания, чтобы гарантировать удовлетворительный уровень эффективности и надежность коммутационного устройства.
К сожалению, такие вмешательства занимают довольно много времени и являются довольно дорогими. Таким образом, эксплуатационные затраты для коммутационного устройства значительно увеличиваются.
Вышеупомянутые недостатки становятся еще более существенными, когда за время эксплуатационного срока службы коммутационного устройства выполняется много (приблизительно 1000000) коммутационных операций, как это происходит, когда коммутационное устройство работает в качестве электрического контактора.
Поэтому целью настоящего изобретения является обеспечение коммутационного устройства электромагнитного типа (то есть использующего электромагнитный привод для приведения в действие электрических контактов), которое позволяет преодолеть недостатки, описанные выше.
В рамках этой цели другая задача настоящего изобретения состоит в обеспечении коммутационного устройства, в котором относительно небольшие механические напряжения и вибрации передаются элементам приводной цепи во время коммутационных операций.
Другая задача настоящего изобретения состоит в обеспечении коммутационного устройства, которое гарантирует высокий уровень безопасности и надежности.
Не менее важная задача настоящего изобретения состоит в обеспечении коммутационного устройства, которое может быть легко реализовано с конкурентоспособными затратами и которое характеризуется относительно низкими эксплуатационными затратами.
Таким образом, настоящее изобретение обеспечивает коммутационное устройство согласно нижеследующему пункту 1 формулы изобретения.
Согласно общему определению, коммутационное устройство согласно изобретению содержит, по меньшей мере, подвижный контакт и неподвижный контакт, выполненные с возможностью соединения или разъединения во время коммутационной операции коммутационного устройства.
Коммутационное устройство согласно изобретению также содержит электромагнитный привод, который содержит катушку возбуждения, в которой во время коммутационной операции циркулирует ток возбуждения, и подвижный сердечник, который функционально соединен с подвижным контактом через кинематическую цепь.
Подвижный сердечник приводится в движение между исходным положением и положением останова во время коммутационной операции.
Коммутационное устройство согласно изобретению дополнительно содержит средство электропитания для подачи тока возбуждения в катушку возбуждения во время коммутационной операции и сенсорное средство для генерирования измерительных сигналов, указывающих силу тока возбуждения, циркулирующего в катушке возбуждения.
Коммутационное устройство согласно изобретению также обеспечено средством управления для управления коммутационными операциями коммутационного устройства, которое принимает измерительные сигналы, генерируемые сенсорным средством.
Упомянутое средство управления выполнено так, что во время коммутационной операции коммутационного устройства оно:
- посылает первый управляющий сигнал средству электропитания, чтобы отдать команду упомянутому средству электропитания начать подачу тока возбуждения с первого момента и далее;
- определяет на основании информации, предоставленной измерительными сигналами, отправленными упомянутым сенсорным средством, второй момент, в который средство электропитания должно прекратить подачу тока возбуждения, при этом упомянутый второй момент имеет место до того, как подвижный сердечник достигнет положения останова во время движения от упомянутого исходного положения к упомянутому положению останова;
- посылает второй управляющий сигнал средству электропитания, чтобы отдать команду упомянутому средству электропитания прекратить подачу тока возбуждения с упомянутого второго момента и до тех пор, пока подвижный сердечник не достигнет упомянутого положения останова.
Другой аспект настоящего изобретения относится к способу управления коммутационной операцией коммутационного устройства согласно нижеследующему пункту 6 формулы изобретения.
В общем определении способ согласно изобретению содержит следующие этапы:
- отправку первого управляющего сигнала средству электропитания, чтобы отдать команду упомянутому средству электропитания начать подачу тока возбуждения с первого момента и далее;
- определение на основании измерительных сигналов, обеспеченных сенсорным средством, второго момента, в который средство электропитания должно прекратить подачу тока возбуждения, при этом упомянутый второй момент имеет место до того, как подвижный сердечник достигнет положения останова во время движения от исходного положения к упомянутому положению останова;
- отправку второго управляющего сигнала средству электропитания, чтобы отдать команду упомянутому средству электропитания прекратить подачу тока возбуждения с упомянутого второго момента и до тех пор, пока подвижный сердечник не достигнет упомянутого положения останова.
Предпочтительно, второй момент, в который средство электропитания должно прекратить подачу тока возбуждения, является моментом, в который подвижный сердечник электромагнитного привода уже достиг положения невозврата во время движения от исходного положения к положению останова.
Предпочтительно, упомянутый второй момент является моментом, в который достигнуты следующие рабочие условия:
- ток возбуждения уменьшается после достижения пикового значения в пиковый момент;
- прошел заранее заданный промежуток времени с упомянутого пикового момента;
- ток возбуждения меньше порогового значение, упомянутое пороговое значение, вычисляемое на основании упомянутого пикового значения.
Другие характеристики и преимущества коммутационного устройства согласно настоящему изобретению станут более очевидны из подробного описания предпочтительных вариантов воплощения, поясняемых только с помощью примера, не накладывающего ограничения, на прилагаемых чертежах, на которых:
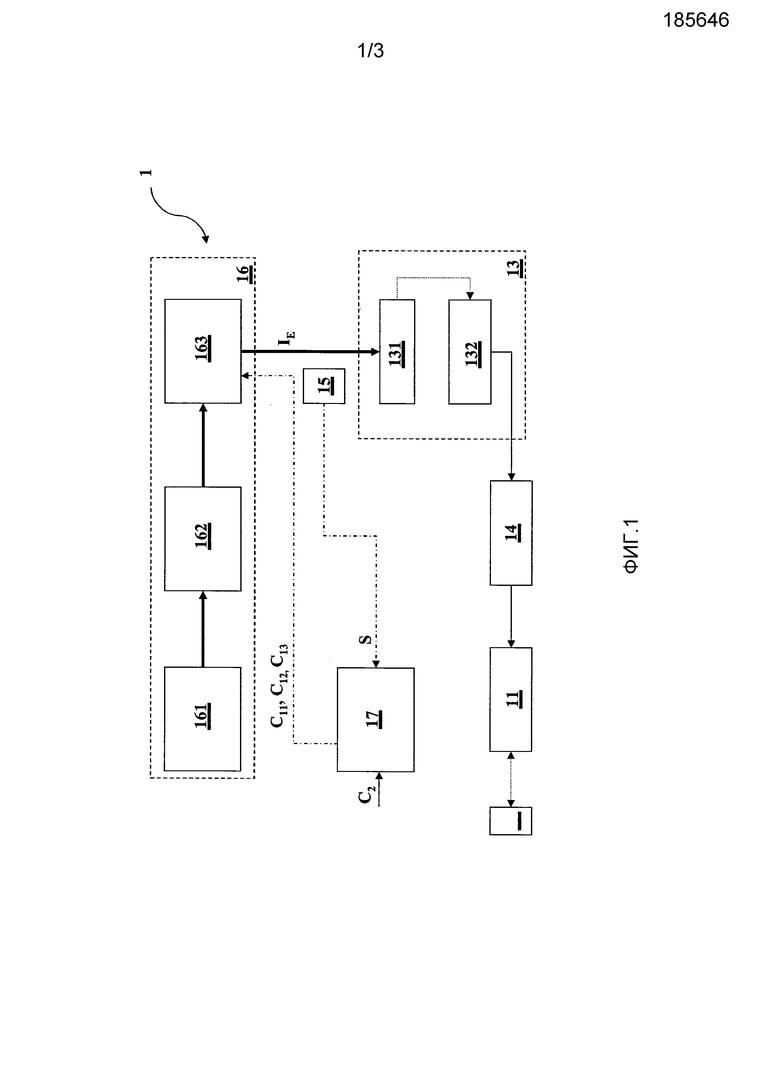
Фиг. 1 является блок-схемой, которая схематично изображает предпочтительный вариант воплощения коммутационного устройства согласно настоящему изобретению; и
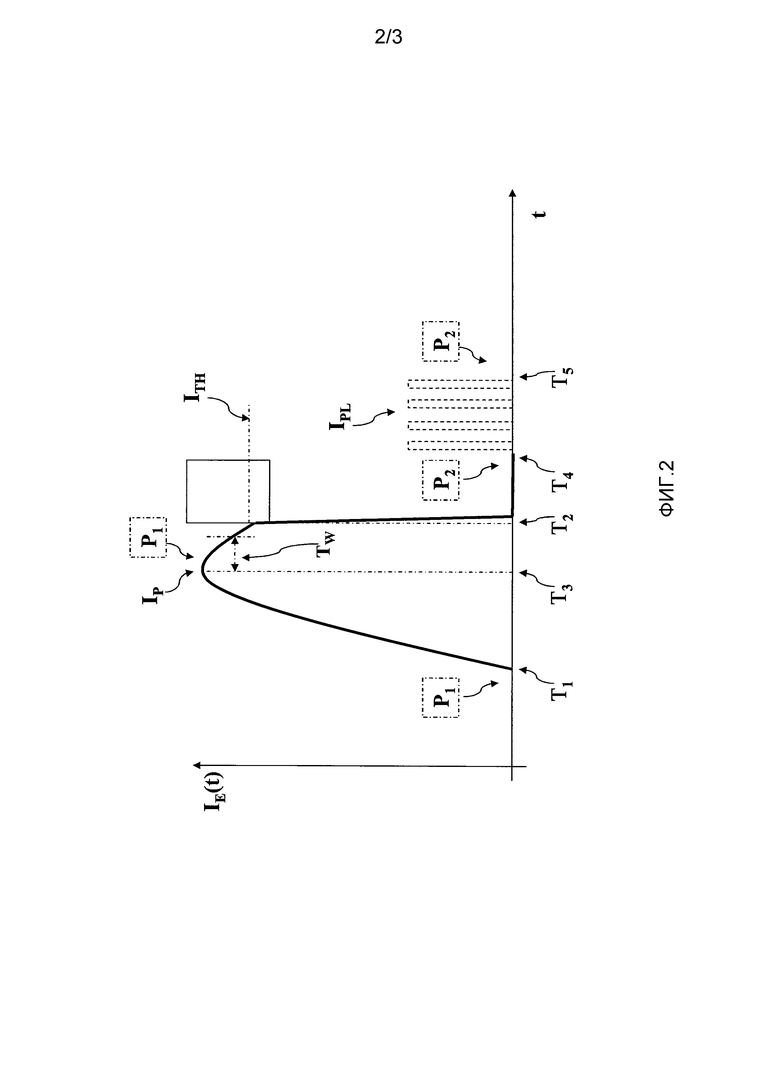
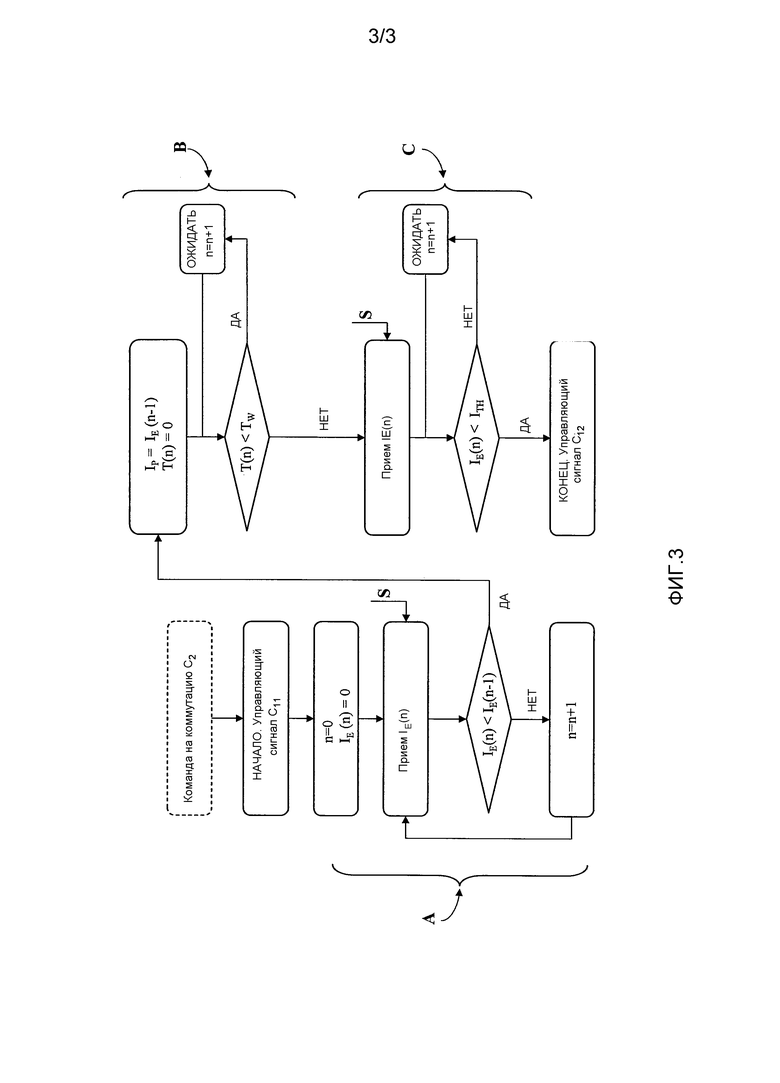
Фиг. 2-3 являются диаграммами, которые схематично изображают работу коммутационного устройства согласно настоящему изобретению.
На приведенных фигурах коммутационное устройство согласно настоящему изобретению, обозначенное ссылкой 1, содержит, по меньшей мере, подвижный контакт 11 и неподвижный контакт 12, которые электрически соединены с фазным проводом энергораспределительной линии (не показана).
Подвижный контакт 11 и неподвижный контакт 12 являются подходящими для соединения или разъединения соответственно во время коммутационной операции коммутационного устройства 1.
Коммутационная операция может быть операцией замыкания, в которой контакты 11 и 12 приводятся из разъединенного состояния в соединенное состояние, или операцией размыкания, в которой контакты 11 и 12 приводятся из соединенного состояния в разъединенное состояние.
Коммутационное устройство 1 содержит электромагнитный привод 13, который содержит катушку 131 возбуждения и подвижный сердечник 132, который функционально соединен с подвижным контактом 11 через кинематическую цепь 14.
Во время коммутационной операции коммутационного устройства ток возбуждения IE циркулирует в катушке 131 возбуждения для генерирования магнитного потока. Подвижный сердечник 132 управляется посредством силы магнитного взаимодействия, генерируемой упомянутым магнитным потоком, в частности, частью упомянутого магнитного потока, который захватывается подвижным сердечником 132.
Во время коммутационной операции коммутационного устройства подвижный сердечник 132 приводится в движение между исходным положением P1 и положением P2 останова.
Если выполняется операция замыкания, исходное положение P1 и положение P2 останова являются положениями подвижного сердечника 132, в которых подвижный контакт 11 находится, соответственно, в соединенном и разъединенном с неподвижным контактом 12 состоянии.
И наоборот, если выполняется операция размыкания, исходное положение P1 и положение P2 останова являются положениями подвижного сердечника 132, в которых подвижный контакт 11 находится, соответственно, в разъединенном и соединенном с неподвижным контактом 12 состоянии.
Предпочтительно, электромагнитный привод 13 содержит магнитную цепь (не показана), на которой намотана катушка 131 возбуждения, чтобы должным образом учесть направление магнитного потока, генерируемого током IE возбуждения.
Один или более постоянные магниты (не показаны) могут располагаться вдоль упомянутой магнитной цепи для генерирования постоянной силы магнитного взаимодействия, которая всегда направлена на постоянное удержание подвижного сердечника 132 в положении P2 останова, когда движение сердечника прекращается.
Коммутационное устройство 1 дополнительно содержит средство 16 электропитания, которое подает ток IE возбуждения на катушку 131 возбуждения во время коммутационной операции.
Предпочтительно, средство 16 электропитания содержит аккумулирующий энергию каскад 162, первый каскад 161 электропитания для зарядки аккумулирующего каскада 162 и второй каскад 163 электропитания для питания катушки 131 возбуждения током IE возбуждения
Аккумулирующий энергию каскад 162 может хранить определенное количество электроэнергии, и он предпочтительно содержит одну или более батарей конденсаторов.
Первый каскад 161 электропитания может выгодно содержать некоторые силовые цепи, которые устроены для отвода электроэнергии от энергораспределительной линии (не показана) и зарядки аккумулирующего каскада 162.
Второй каскад 163 электропитания является выгодно соединенным за аккумулирующим энергию каскадом 162, и может содержать подходящие силовые цепи, которые способны регулировать подачу электропитания (то есть подачу тока IE возбуждения) от аккумулирующего энергию каскада 123 к катушке 131 возбуждения.
Коммутационное устройство 1 содержит также сенсорное средство 15, которое генерирует измерительные сигналы S, которые являются показателем силы тока IE возбуждения, циркулирующего в катушке 131 возбуждения, и средство 17 управления для управления коммутационной операцией коммутационного устройства 1.
Предпочтительно, измерительные сигналы S являются дискретными сигналами, которые содержат ряд измеренных значений, указывающих силу тока IE возбуждения, измеренную сенсорным средством 15 в последовательные моменты измерения.
В частности средство 17 управления, к выгоде, способно генерировать управляющие сигналы С11 и С12 для указания средству 16 электропитания, в частности второму каскаду 163 электропитания, того, как регулировать подачу тока IE возбуждения катушке 131 возбуждения.
Кроме того, средство 17 управления выгодно выполнено с возможностью приема измерительных сигналов S от сенсорного средства 15 и команд C2 на коммутацию (то есть команд на замыкание или размыкание) от защитного устройства (не показано) или интерфейса человек-машина (не показан), который управляется пользователем.
Предпочтительно, средство 17 управления содержит компьютеризированный блок, такой как микропроцессор.
Согласно изобретению, средство 17 управления выполнено так, чтобы оно выполняло определенные действия по улучшению регулирования коммутационных операций коммутационного устройства. Такие мероприятия предпочтительно содержат подходящие программы, исполнимые упомянутым компьютеризированным блоком.
Согласно изобретению, когда должна быть выполнена коммутационная операция (то есть операция замыкания или размыкания), средство 17 управления отправляет первый управляющий сигнал С11 средству 16 электропитания, чтобы отдать ему команду начать подачу тока IE возбуждения с первого момента T1 и далее.
К выгоде, первый управляющий сигнал С11 может генерироваться средством 17 управления, когда принята команда C2 на коммутацию.
На основе информации, предоставленной измерительными сигналами S, средство 17 управления вычисляет второй момент T2, в который средство 16 электропитания должно прекратить подачу тока IE возбуждения катушке 131 возбуждения.
Как только второй момент T2 определен, средство 17 управления посылает второй управляющий сигнал C12 средству 16 электропитания, чтобы прекратить подачу тока IE возбуждения катушке 131 возбуждения с упомянутого второго момента T2 и до тех пор, пока подвижный сердечник не достигнет положения P2 останова в момент T4.
Со ссылкой на фиг. 2 теперь будет более подробно описана работа средства 17 управления.
Как только первый управляющий сигнал С11 принят от средства 17 управления, средство 16 электропитания подает ток IE возбуждения на катушку 131 возбуждения, начиная с первого момента T1.
В этой фазе ток IE возбуждения быстро увеличивается для подачи питания на катушку 131 возбуждения.
Когда ток IE возбуждения достигает пикового значения IP в пиковый момент T3, это означает, что подвижный сердечник 132 начал свое движение к положению P2 останова, так как была достигнута достаточная подача питания на катушку возбуждения для генерирования силы магнитного взаимодействия, которая достаточно велика для управления подвижным сердечником 132.
С момента T3 и далее подвижный сердечник подвергается постоянному ускорению из-за приложенной силы магнитного взаимодействия, генерируемой катушкой 131 возбуждения, и поэтому его скорость увеличивается, в то время как ток IE возбуждения будет в свою очередь уменьшаться.
Следует отметить, что время наступления пикового момента T3 изменяется в соответствии с фактическими условиями работы приводной цепи, формируемой подвижным сердечником 132 и кинематической цепью 14.
Например, момент T3 может меняться в течение срока службы коммутационного устройства из-за возникновение трения или явления износа, колебаний температуры или добавления внешних нагрузок.
Согласно изобретению второй момент T2, который вычисляется средством 17 управления для прекращения подачи тока IE возбуждения, наступает до того, как подвижный сердечник 132 достигнет положения P2 останова (момент T4) во время его движения от исходного положения P1 к положению P2 останова.
Второй момент T2, таким образом, находится между моментом T3, в который подвижный сердечник 132 начинает двигаться из исходного положения P1, и моментом T4, в который подвижный сердечник 132 достигает положения P2 останова.
Предпочтительно, второй момент T2 является моментом, в который подвижный сердечник 132 уже достиг положения невозврата во время своего движения от исходного положения P1 к положению P2 останова.
Упомянутое положение невозврата является положением, в котором подвижный сердечник 132 набирает достаточную кинетическую энергию, чтобы продолжать свое движение и достигнуть положения P2 останова без необходимости в силе магнитного взаимодействия, генерируемой катушкой 131 возбуждения.
Другими словами, упомянутое положение невозврата является положением, после которого подвижный сердечник 132 может достигнуть положения P2 останова благодаря только его собственной силе инерции и, возможно, благодаря силе магнитного взаимодействия, генерируемой постоянными магнитами, расположенными в электромагнитном приводе.
Предпочтительно, второй момент T2 является временем движения, вычисляемым на основании пикового значения IP, которое достигается током IE возбуждения во время коммутационной операции.
Это решение является довольно выгодным. Так как момент T3 зависит от фактических условий работы приводной цепи коммутационного устройства 1, вычисление момента T2 внутренне скомпенсировано относительно возможных вариаций рабочего состояния приводной цепи коммутационного устройства.
К выгоде, момент T2 вычисляется средством 17 управления как момент, в который достигаются следующие рабочие условия:
- ток IE возбуждения уменьшается после достижения пикового значения IP в пиковый момент T3;
- прошел заранее заданный промежуток времени TW с пикового момента Т3;
- ток IE возбуждения меньше порогового значения ITH.
Предпочтительно, заранее заданный промежуток времени TW является фиксированным на основании номинальной производительности, которая ожидается для приводной цепи коммутационного устройства. Временной интервал между моментами T3 и T4 (то есть время, затраченное подвижным сердечником 132 на перемещение между положениями P1 и P2) зависит от расстояния между P1 и P2 и от скорости подвижного сердечника 132 и, как правило, составляет от 3,5 мс до 3,7 мс. Величина промежутка времени TW может быть разумно установлена равной 2 мс для большинства коммутационных устройств, которые будут предлагаться на рынке.
Пороговое значение ITH выгодно вычисляется на основании пикового значения IP, предпочтительно, согласно следующему соотношению ITH=K*IP с 0,7<K<0,9. Предпочтительно, пороговое значение ITH устанавливается равным ITH=0,8*IP.
Как только принят первый управляющий сигнал С12, средство 16 электропитания прекращает подачу тока IE возбуждения на катушку 131 возбуждения, начиная со второго момента T2.
С момента T2 и далее скорость подвижного сердечника 132 остается постоянной до тех пор, пока подвижный сердечник 132 не достигает положения P2 останова. Фактически подвижный сердечник 132 больше не ускоряется силой магнитного взаимодействия, генерируемой током IE возбуждения, а движется только благодаря своей силе инерции и, возможно, благодаря силе магнитного взаимодействия, генерируемой постоянными магнитами.
Таким образом, подвижный сердечник 132 достигает положения P2 останова с кинематической энергией, которая существенно меньше, чем в традиционных решениях.
Это позволяет существенно сократить механические напряжения и вибрации, передаваемые элементам приводной цепи во время коммутационных операций.
Согласно предпочтительному варианту воплощения настоящего изобретения, средство 17 управления выполнено так, чтобы выполнять множество управляющих процедур для определения второго момента T2.
Каждая управляющая процедура, к выгоде, реализована посредством программы, выполняемой компьютеризированным блоком.
Отправив управляющий сигнал С11, средство 17 управления, предпочтительно, выполняет первую управляющую процедура для проверки, достиг ли ток IE возбуждения пикового значения IP.
Как видно из фиг. 3, управляющая процедура A содержит цикл сравнения, в котором значение IE(n) тока возбуждения в n-ый момент сравнивается со значением IE(n-1) тока возбуждения в n-1 момент.
Значения, указывающие ток IE возбуждения в последовательные моменты измерения (... n-1, n, n+1,...), обеспечиваются с помощью измерительных сигналов S.
После того, как управляющее условие IE(n)<IE(n-1) достигнуто, цикл сравнения прерывается, а значение IE(n-1) рассматривается как пиковое значение IP тока IE возбуждения.
Затем средство 17 управления начинает вторую управляющую процедуру В для проверки того, прошел ли заранее заданный промежуток времени TW с пикового момента TP.
Также управляющая процедура В, к выгоде, содержит цикл сравнения, в котором увеличивающееся значение времени T(n) сравнивается с заранее заданным значением времени TW. После того, как получено управляющее условие T(n)>TW, цикл сравнения прерывается.
Средство 17 управления затем выполняет третью управляющую процедуру С для проверки, меньше ли ток IE возбуждения порогового значения ITH.
Управляющая процедура С, к выгоде, содержит дополнительный цикл сравнения, в котором значением IE(n) тока возбуждения в n-ый момент сравнивается с пороговым значением ITH.
Также в этом случае значения, указывающие ток IE возбуждения в последовательные моменты измерения (... n-1, n, n+1,...), обеспечиваются с помощью измерительных сигналов S.
После того как получено управляющее условие IE(n)<ITH, цикл сравнения прерывается и n-ый момент, в который достигнуто вышеупомянутое управляющее условие, рассматривается как момент T2, в который должна быть прекращена подача тока возбуждения катушке 131 возбуждения.
Согласно другому варианту воплощения настоящего изобретения, средство 17 управления выполнено так, чтобы посылать третьи управляющие сигналы C13 средству 16 электропитания, чтобы отдать команду подать один или более импульсов IPL тока IE возбуждения на катушку 131 возбуждения после того, как подвижный сердечник 132 достигнет положения P2 останова в момент T4.
Это решение является довольно выгодным для постоянного удержания подвижного сердечника 132 в положении P2 останова до тех пор, пока продолжающаяся коммутационная операция не завершится в момент T5.
Другой аспект настоящего изобретения относится к способу управления коммутационными операциями коммутационного устройства 1.
В соответствии с аспектами настоящего изобретения, изображенного выше, способ согласно изобретению выгодно применяется для коммутационной операции замыкания или размыкания коммутационного устройства.
Способ согласно изобретению содержит следующие этапы:
- отправки первого управляющего сигнала С11 средству 16 электропитания, чтобы отдать ему команду начать подачу тока возбуждения с первого момента T1 и далее;
- определения на основании информации, предоставленной измерительными сигналами S, второго момента T2, в который средство 16 электропитания должно прекратить подачу тока IE возбуждения. Второй момент T2 имеет место до того, как подвижный сердечник 132 достигнет положения P2 останова;
- отправки второго управляющего сигнала C12 средству 16 электропитания, чтобы отдать ему команду прекратить подачу тока IE возбуждения со второго момента T2 и до тех пор, пока подвижный сердечник 132 не достигнет положения P2 останова.
Предпочтительно, этап определения второго момента T2 содержит подэтапы:
- проверки, достиг ли ток IE возбуждения пикового значения IP;
- проверки, прошел ли заранее заданный промежуток времени TW с пикового момента IP;
- проверки, меньше ли ток IE возбуждения порогового значения ITH, упомянутое пороговое значение вычисляется на основании пикового значения IP.
Кроме того, способ согласно изобретению предпочтительно содержит этап отправки третьих управляющих сигналов С13 средству 16 электропитания для подачи одного или более импульсов IPL тока IE возбуждения после того, как подвижный сердечник 132 достиг положения P2 останова.
Коммутационное устройство 1, согласно настоящему изобретению, позволяет достичь намеченные цели и задачи.
В коммутационном устройстве согласно изобретению малые механические напряжения и вибрации передаются оставшимся механическим частям приводной цепи электромагнитного привода во время перемещения подвижного сердечника.
Относительно традиционных решений, этот факт приводит к уменьшению явления износа. Число эксплуатационных вмешательств, которые необходимы в течение срока службы коммутационного устройства, таким образом, может быть выгодно сокращено.
В коммутационном устройстве согласно изобретению вероятность выхода за пределы или явления отскока между электрическими контактами уменьшена относительно традиционных решений.
Лабораторные испытания доказали, как этот факт обеспечивает значительные преимущества, когда коммутационные операции коммутационного устройства выполняются на емкостных нагрузках.
Кроме того, могут быть уменьшены диэлектрические расстояния между находящимися под напряжением частями коммутационного устройства, что позволяет получить более компактную структуру для коммутационного устройства со значительными преимуществами во время реализации и монтажа коммутационного устройства.
Коммутационное устройство согласно изобретению имеет относительно низкую стоимость производства и доказало, что оно характеризуется высоким уровнем безопасности и надежности коммутационных операций.
Коммутационное устройство (1) содержит:
- подвижный (11) и неподвижный (12)контакты, выполненные с возможностью соединения или разъединения во время коммутационной операции коммутационного устройства;
- электромагнитный привод (13) с катушкой (131) возбуждения, в которой циркулирует ток (IE) возбуждения, и подвижный сердечник (132), функционально соединенный с подвижным контактом через кинематическую цепь (14), при этом подвижный сердечник приводится в движение между исходным положением (P1) и положением (P2) останова во время коммутационной операции;
- средство (16) электропитания, подающее ток возбуждения катушке возбуждения во время коммутационной операции;
- сенсорное средство (15), генерирующее измерительные сигналы, указывающие силу тока возбуждения;
- средство (17) управления коммутационными операциями, принимающее измерительные сигналы, генерируемые сенсорным средством.
Во время выполнения коммутационной операции средство управления:
- посылает первый управляющий сигнал средству электропитания, чтобы начать подачу тока возбуждения с первого момента (T1) и далее;
- определяет на основании информации, предоставленной измерительными сигналами, второй момент (T2), в который средство электропитания должно прекратить подачу тока возбуждения, причем второй момент имеет место до того, как подвижный сердечник достигнет положения (P2) останова во время движения от исходного положения (P1) к положению (P2) останова;
- посылает второй управляющий сигнал средству электропитания, чтобы прекратить подачу упомянутого тока возбуждения с второго момента (T2) и до тех пор, пока подвижный сердечник не достигнет положения останова.
Технический результат - создание коммутацищнного устройства с высоким уровнем безопасности и надежности, в котором небольшие, относительно небольшие механические напряжения и вибрации передаются элементам приводной цепи во время коммутации. 2 н. и 8 з.п. ф-лы, 3 ил. 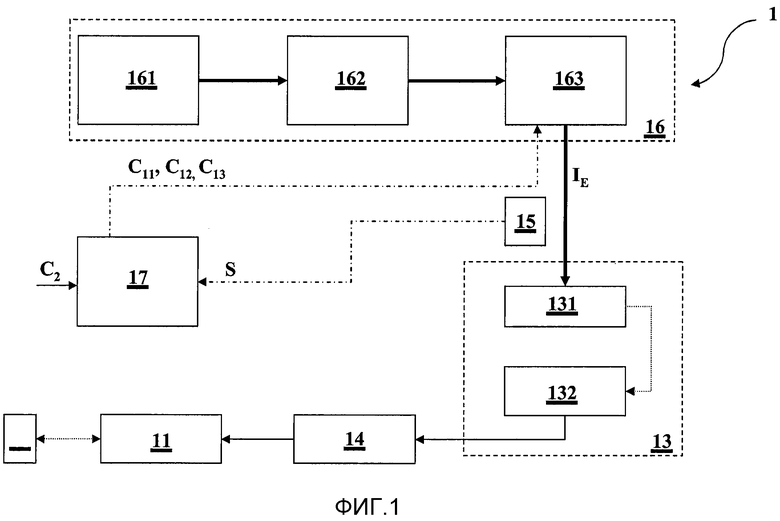
1. Коммутационное устройство (1), содержащее:
- по меньшей мере, подвижный контакт (11) и неподвижный контакт (12), которые выполнены с возможностью соединения или разъединения во время коммутационной операции упомянутого коммутационного устройства;
- электромагнитный привод (13), содержащий катушку (131) возбуждения, в которой ток (IE) возбуждения циркулирует во время коммутационной операции, и подвижный сердечник (132), который функционально соединен с упомянутым подвижным контактом через кинематическую цепь (14), при этом упомянутый подвижный сердечник приводится в движение между исходным положением (P1) и положением (P2) останова во время коммутационной операции;
- средство (16) электропитания, которое подает упомянутый ток возбуждения упомянутой катушке возбуждения во время коммутационной операции;
- сенсорное средство (15), которое генерирует измерительные сигналы, указывающие силу упомянутого тока возбуждения;
- средство (17) управления для управления коммутационными операциями упомянутого коммутационного устройства, при чем упомянутое средство управления принимает измерительные сигналы, генерируемые упомянутым сенсорным средством;
отличающееся тем, что упомянутое средство управления выполнено так, что во время выполнения коммутационной операции упомянутое средство управления:
- отправляет первый управляющий сигнал (С11) упомянутому средству электропитания, чтобы начать подачу упомянутого тока возбуждения с первого момента (T1) и далее;
- определяет на основании информации, предоставленной упомянутыми измерительными сигналами, второй момент (T2), в который упомянутое средство электропитания должно прекратить подачу упомянутого тока возбуждения, при этом упомянутый второй момент имеет место до того, как упомянутый подвижный сердечник достигнет упомянутого положения (P2) останова во время движения от упомянутого исходного положения (P1) к упомянутому положению (P2) останова;
- отправляет второй управляющий сигнал (C12) упомянутому средству электропитания, чтобы прекратить подачу упомянутого тока возбуждения с упомянутого второго момента (T2) и до тех пор, пока упомянутый подвижный сердечник не достигнет упомянутого положения останова.
2. Коммутационное устройство по п. 1, отличающееся тем, что упомянутый второй момент (T2) является моментом, в который упомянутый подвижный сердечник уже достиг положения невозврата во время движения от упомянутого исходного положения (P1) к упомянутому положению (P2) останова.
3. Коммутационное устройство по одному или более из предыдущих пунктов, отличающееся тем, что упомянутый второй момент (T2) является моментом, в который достигнуты следующие рабочие условия:
- ток (IE) возбуждения уменьшается после достижения пикового значения (IP) в пиковый момент (T3);
- прошел заранее заданный промежуток времени (TW) с упомянутого пикового момента;
- упомянутый ток (IE) возбуждения меньше порогового значения (ITH), при этом упомянутое пороговое значение вычисляется на основании упомянутого пикового значения.
4. Коммутационное устройство по п. 3, отличающееся тем, что упомянутое средство управления выполнено так, что, чтобы определить упомянутый второй момент (T2), упомянутое средство управления:
- выполняет первую управляющую процедуру (A) для проверки, достиг ли ток (IE) возбуждения пикового значения (IP) в пиковый момент (T3);
- выполняет вторую управляющую процедура (B) для проверки, прошел ли заранее заданный промежуток времени (TW) с упомянутого пикового момента;
- выполняет третью управляющую процедура (C) для проверки, меньше ли упомянутый ток (IE) возбуждения порогового значения (ITH), причем упомянутое пороговое значение (ITH) вычисляется на основании упомянутого пикового значения.
5. Коммутационное устройство по п. 1, отличающееся тем, что упомянутое средство управления выполнено так, что после того, как упомянутый подвижный сердечник достигает упомянутое положение останова, упомянутое средство управления отправляет третьи управляющие сигналы (C13) упомянутому средству электропитания, чтобы подать один или более импульсов (IPL) упомянутого тока возбуждения.
6. Способ управления коммутационными операциями коммутационного устройства, причем упомянутое коммутационное устройство содержит:
- по меньшей мере, подвижный контакт (11) и неподвижный контакт (12), которые выполнены с возможностью соединения или разъединения во время коммутационной операции упомянутого коммутационного устройства;
- электромагнитный привод (13), содержащий катушку (131) возбуждения, в которой циркулирует ток (IE) возбуждения во время коммутационной операции, и подвижный сердечник (132), который функционально соединен с упомянутым подвижным контактом через кинематическую цепь (133), при этом упомянутый подвижный сердечник двигается между исходным положением (P1) и положением (P2) останова во время коммутационной операции;
- средство электропитания (16), которое подает упомянутый ток возбуждения упомянутой катушке возбуждения во время коммутационной операции;
- сенсорное средство (15) для генерирования измерительных сигналов, указывающих силу тока возбуждения, циркулирующего в упомянутой катушке возбуждения;
отличающийся тем, что он содержит следующие этапы:
- отправку первого управляющего сигнала (С11) упомянутому средству электропитания, чтобы начать подачу упомянутого тока возбуждения с первого момента (T1) и далее;
- определение на основании информации, предоставленной упомянутыми измерительными сигналами, второго момента (T2), в который упомянутое средство электропитания должно прекратить подачу упомянутого тока возбуждения, при этом упомянутый второй момент имеет место до того, как упомянутый подвижный сердечник достигнет упомянутого положения (P2) останова во время движения от упомянутого исходного положения (P1) к упомянутому положению (P2) останова;
- отправку второго управляющего сигнала (C12) упомянутому средству электропитания, чтобы прекратить подачу упомянутого тока возбуждения с упомянутого второго момента (T2) и до тех пор, пока упомянутый подвижный сердечник не достигнет упомянутого положения останова.
7. Способ по п. 6, отличающийся тем, что упомянутый второй момент является моментом, в который упомянутый подвижный сердечник уже достиг положения невозврата во время движения от упомянутого исходного положения (P1) к упомянутому положению (P2) останова.
8. Способ по п. 6, отличающийся тем, что упомянутый второй момент (T2) является моментом, в который достигнуты следующие рабочие условия:
- ток (IE) возбуждения уменьшается после достижения пикового значения (IP) в пиковый момент (T3);
- прошел заранее заданный промежуток времени (TW) с упомянутого пикового момента;
- упомянутый ток (IE) возбуждения меньше порогового значения (ITH), при этом упомянутое пороговое значение вычисляют на основании упомянутого пикового значения.
9. Способ по п. 8, отличающийся тем, что упомянутый этап определения упомянутого второго момента (T2) содержит подэтапы:
- проверки, достиг ли ток (IE) возбуждения пикового значения (IP) в пиковый момент (T3);
- проверки, прошел ли заранее заданный промежуток времени (TW) с упомянутого пикового момента;
- проверки, меньше ли упомянутый ток (IE) возбуждения порогового значения (ITH), при этом упомянутое пороговое значение вычисляют на основании упомянутого пикового значения.
10. Способ по п. 6, отличающийся тем, что он содержит этап посылки третьих управляющих сигналов (C13) упомянутому средству электропитания подать один или более импульсов (IPL) упомянутого тока возбуждения после того, как упомянутый подвижный сердечник достиг упомянутого положения останова.
| СПОСОБ СУШКИ ЛЬНА В СНОПАХ И ЛЬНОСОЛОМР В СНОПАХ И КИПАХ | 0 |
|
SU376493A1 |
| СПОСОБ ЭКСТРАКЦИОННОГО ИЗВЛЕЧЕНИЯ МЕТАЛЛОВ ИЗ РАСТВОРОВПЕРЕХОДНЫХ | 0 |
|
SU279592A1 |
| EP 1923986 A2, 21.05.2008 | |||
| EP 1998351 A1, 03.12.2008. | |||

