Область техники
Настоящее изобретение относится к устройству управления возбуждением электродвигателя переменного тока для возбуждения синхронного электродвигателя с постоянными магнитами, содержащегося в электрических транспортных средствах (вагонах).
Предшествующий уровень техники
Синхронный электродвигатель с постоянными магнитами известен как высокоэффективный электродвигатель по сравнению с асинхронным электродвигателем, который традиционно широко используется в различных областях, и его применение для приведения в движение автомобиля или электропоезда изучается в последние годы. В электрическом транспортном средстве, движущемся с множеством сцепленных между собой транспортных средств, каждое из которых содержит такой электродвигатель переменного тока и устройство управления возбуждением электродвигателя, даже если устройство управления возбуждением электродвигателя в части транспортного средства повреждается при движении, и часть электродвигателей, следовательно, не может управляться, электрическое транспортное средство может продолжать движение посредством других стабильных устройств управления возбуждением электродвигателя переменного тока и электродвигателей. Тем не менее, следует отметить, что, поскольку электродвигатель, подключенный к поврежденному устройству управления возбуждением электродвигателя переменного тока, продолжает приводиться во вращение со стороны колес, ток короткого замыкания вследствие индуцированного напряжения электродвигателя продолжает протекать через неисправную часть (короткозамкнутую часть) в устройстве управления возбуждением электродвигателя переменного тока, имеющем короткое замыкание.
В качестве способа для исключения неполадок инвертора в устройстве управления возбуждением электродвигателя переменного тока для управления возбуждением синхронного электродвигателя с постоянными магнитами в то время, когда электрический подвижной состав движется, как описано выше, нижеприведенный патентный документ 1, например, раскрывает способ, в котором предоставляется размыкающий контактор электродвигателя для электрического разъединения инвертора и электродвигателя с тем, чтобы предотвращать развитие повреждения инвертора вследствие индуцированного напряжения электродвигателя, и если блок управления детектирует повреждение в инверторе, блок управления выполняет управление с разомкнутым контуром для этого контактора с тем, чтобы электрически разъединять инвертор и электродвигатель.
Кроме того, в качестве размыкающего контактора, нижеприведенный патентный документ 2 упоминает вакуумный контактор, имеющий высокие рабочие характеристики отсечки. Кроме того, патентный документ 2 раскрывает способ, в котором ферриты располагаются на верхней стороне и нижней стороне контактора так, что они ограничивают явление предварительной дуги или замыкающее перенапряжение между контактами, когда вакуумный контактор замыкается.
Список библиографических ссылок
Патентный документ 1. Выложенная заявка на патент (Япония) номер H8-182105.
Патентный документ 2. Выложенная заявка на патент (Япония) номер 2008-79496.
Краткое изложение существа изобретения
Техническая задача
Типично, размыкающий контактор электродвигателя спроектирован с возможностью размыкаться и замыкаться в состоянии отсутствия напряжения и имеет последовательность, при которой сначала выполняется запирание инвертора, и затем отключается команда замыкания на контактор, или включается команда замыкания на контактор, в то время как выполняется запирание инвертора. Однако, если контактор является неисправным (разъединение линии управления к контактору или неисправность вследствие других неожиданных причин), возможно, возникают случаи, когда контактор работает противоположно вышеописанной команде замыкания. В частности, если контактор замыкается, в то время как выполняется отпирание инвертора, существует возможность генерирования замыкающего перенапряжения (перенапряжения), специфического для вакуумных контактов. В качестве характеристик вакуумных контактов, они имеют характеристики отсечки, охватывающие вплоть до области высоких частот (сотни килогерц) по сравнению с другими контактами в газе или в масле. Когда вакуумные контакты, к которым прикладывается напряжение, принудительно выполняют операцию замыкания, пробой диэлектрика вызывается по мере того, как расстояние между контактами уменьшается, приводя к генерированию предварительной дуги. Хотя высокочастотный ток, тем самым, протекает через нее, предварительная дуга отсекается вследствие силы быстрого восстановления диэлектрика в вакууме, и генерируется переходное напряжение восстановления, связанное с отсечкой. Вследствие увеличения этого переходного напряжения восстановления, процесс пробоя диэлектрика и отсечки высокочастотного тока повторяются снова до тех пор, пока контакты не входят в механический контакт друг с другом. Таким образом, сгенерированное перенапряжение иногда достигает уровня от нескольких киловольт до десятков киловольт, возможно приводя к пробою диэлектрика в компонентах электродвигателя или устройствах управления возбуждением. Таким образом, величина перенапряжения должна быть подавлена до низкого уровня.
Патентный документ 2, упомянутый выше, использует ферритовые сердечники для того, чтобы подавлять выбросы напряжения, и ферритовые сердечники располагаются в каждой из трех фаз вакуумных контактов и вокруг обоих проводников на верхней стороне и нижней стороне вакуумных контактов. Тем не менее, требуется пространство для расположения шести ферритовых сердечников в устройстве управления возбуждением электродвигателя переменного тока в расчете на один электродвигатель. Таким образом, если одно транспортное средство с электроприводом имеет четыре-шесть электродвигателей, общее число ферритовых сердечников, которые должны быть расположены в устройстве управления возбуждением для управления возбуждением этих электродвигателей, равняется 24-36, тем самым, приводя к большому устройству управления возбуждением. Увеличение размера или веса устройства управления возбуждением, как описано выше, приводит к увеличению затрат на изготовление или снижению эффективности использования энергии в ходе его движения. Кроме того, перегрев сердечника вследствие вихревых токов, индуцированных на поверхности ферритового сердечника от высокочастотной составляющей протекающего тока, может рассматриваться в качестве проблемы, которая должна быть решена.
Настоящее изобретение осуществлено с учетом вышеизложенного, и его задача заключается в том, чтобы получить устройство управления возбуждением электродвигателя переменного тока, способное не допускать генерирование опасного перенапряжения коммутации, связанного с переключением размыкающего контактора электродвигателя.
Для решения вышеупомянутых проблем и решения задачи настоящего изобретения, предусмотрено устройство управления возбуждением электродвигателя переменного тока, включающее в себя инвертор, включающий в себя множество переключающих элементов, предназначенных для управления путем включения/выключения, для преобразования напряжения постоянного тока в напряжение переменного тока с требуемой частотой, чтобы возбуждать электродвигатель переменного тока, блок переключения на стороне электродвигателя, подключенный между инвертором и электродвигателем переменного тока, блок предварительного детектирования операции переключения для детектирования операции переключения блока переключения на стороне электродвигателя до контакта или отсоединения главных контактов и вывода сигнала предварительного детектирования операции переключения и блок управления, имеющий блок управления инвертора для выполнения управления включением/выключением для множества переключающих элементов и управления инвертором на основе сигнала предварительного детектирования операции переключения.
Согласно этому изобретению, если размыкающий контактор электродвигателя является неисправным вследствие некоторой причины в то время, когда инвертор работает, операция размыкающего контактора электродвигателя (операция переключения (контакта или отсоединения)) детектируется заранее до того, как размыкающий контактор электродвигателя отсекает или подает ток, и инвертор управляется так, что он предотвращает приложение напряжения включения/выключения (напряжения, изменяющегося в импульсной форме) инвертора между главными контактами блока переключения электродвигателя. Таким образом, достигается возможность не допускать генерирование опасного перенапряжения коммутации, связанного с переключением размыкающего контактора электродвигателя.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения изобретения со ссылками на сопроводительные чертежи, на которых:
Фиг. 1 изображает схему, показывающую примерную конфигурацию устройства управления возбуждением электродвигателя переменного тока и соответствующих, подключенных к нему устройств в первом или втором варианте осуществления настоящего изобретения.
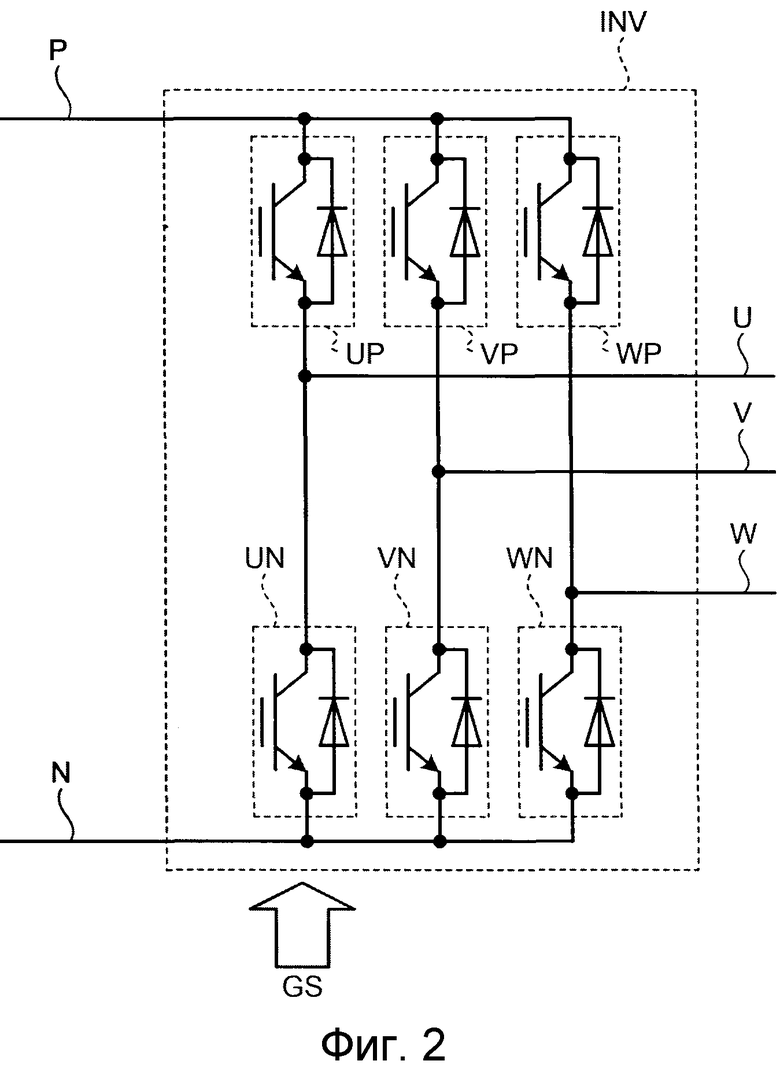
Фиг. 2 изображает схему, показывающую примерную конфигурацию инвертора в первом варианте осуществления настоящего изобретения.
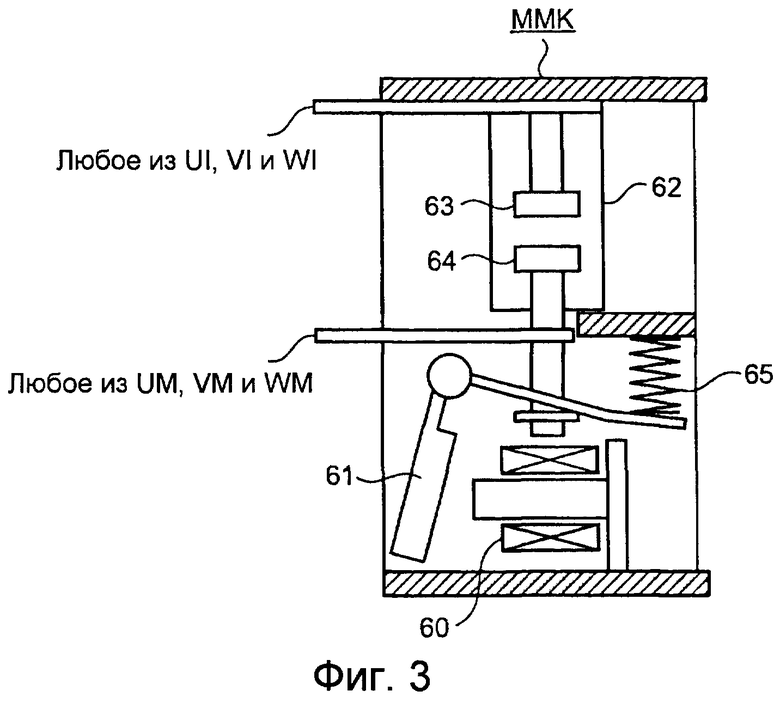
Фиг. 3 изображает схему для пояснения работы блока MMK для управления размыкающим контактором MMK электродвигателя, показанным на фиг. 1.
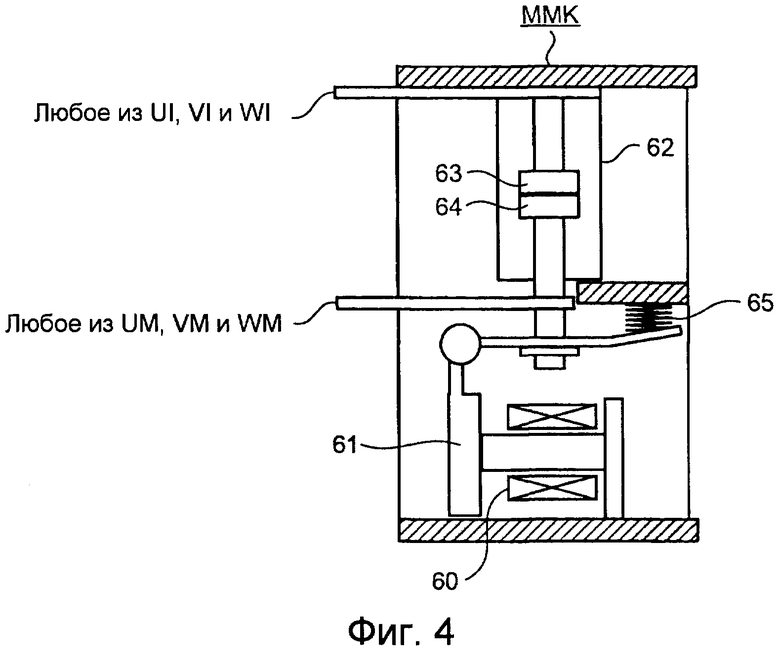
Фиг. 4 изображает схему, показывающую размыкающий контактор MMK электродвигателя и функциональный блок MMK, в котором контакты замкнуты.
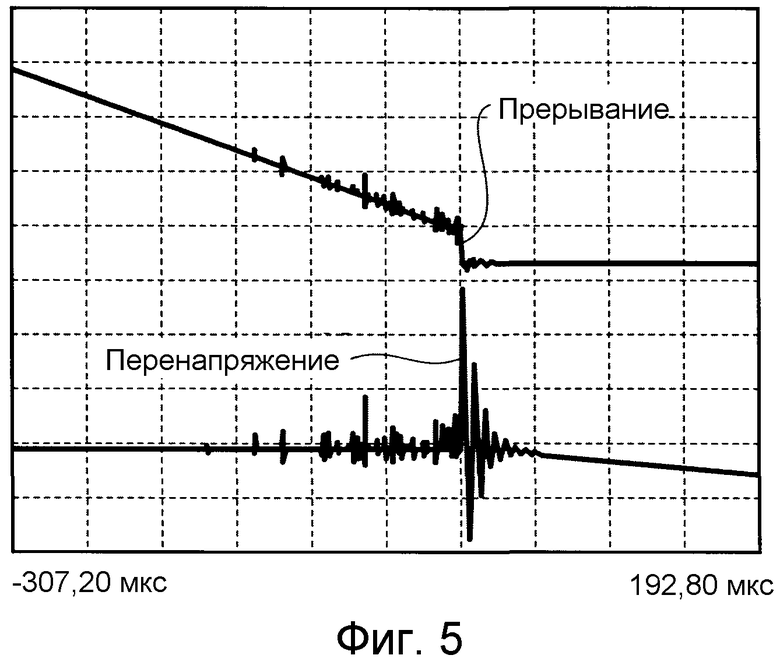
Фиг. 5 изображает диаграмму, показывающую форму сигнала прерывающего перенапряжения вакуумного контактора.
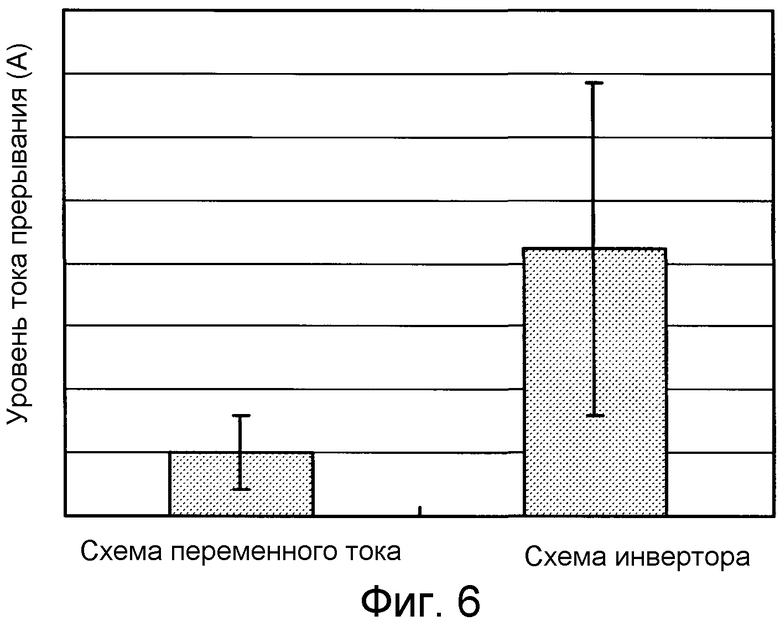
Фиг. 6 изображает диаграмму фактических измерений, показывающую разность между уровнем тока прерывания в схеме переменного тока и уровнем тока прерывания в схеме инвертора.
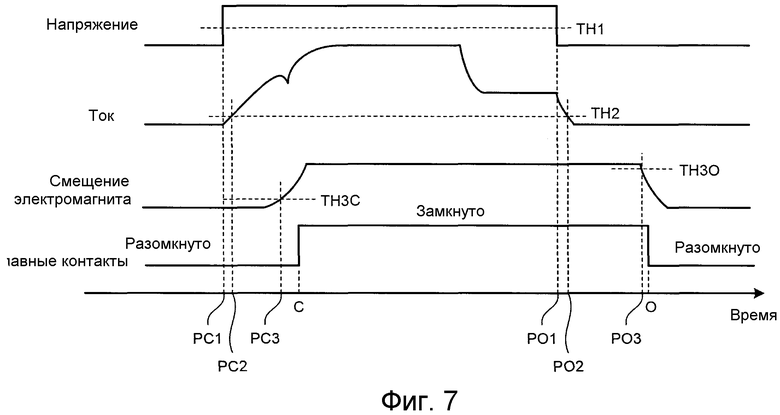
Фиг. 7 изображает диаграмму для пояснения операций замыкания и размыкания вакуумного контактора в качестве размыкающего контактора электродвигателя.
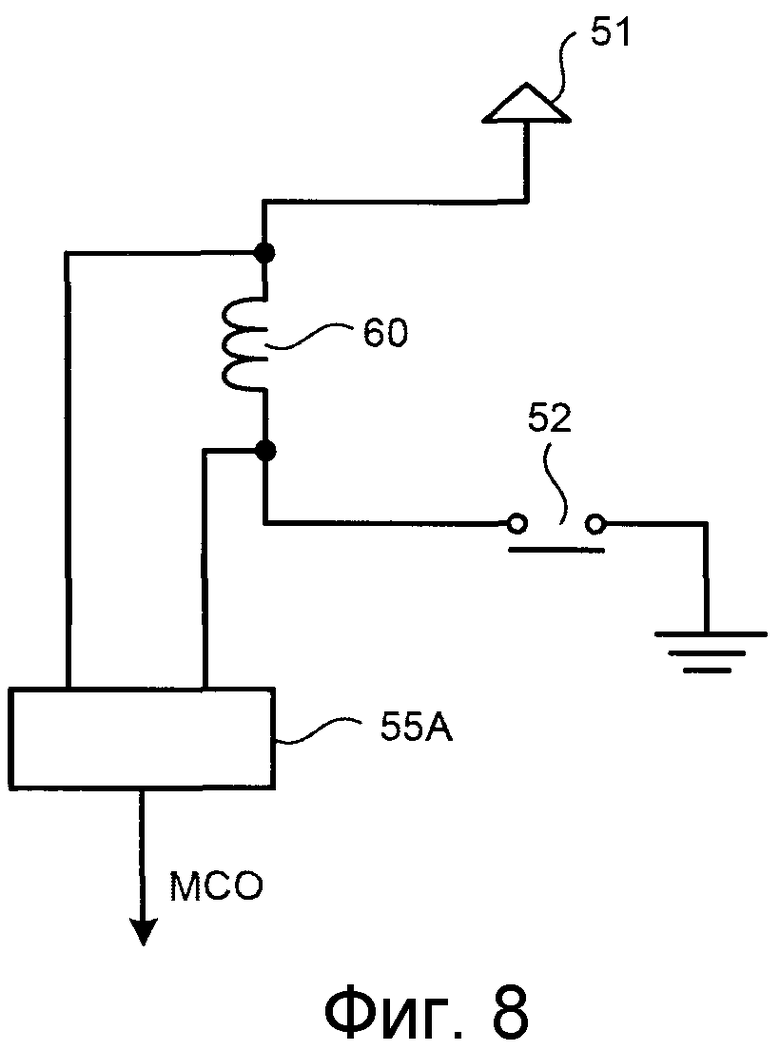
Фиг. 8 изображает примерную конфигурацию блока предварительного детектирования операции переключения для контроля разности потенциалов в катушке, показанной на фиг. 3.
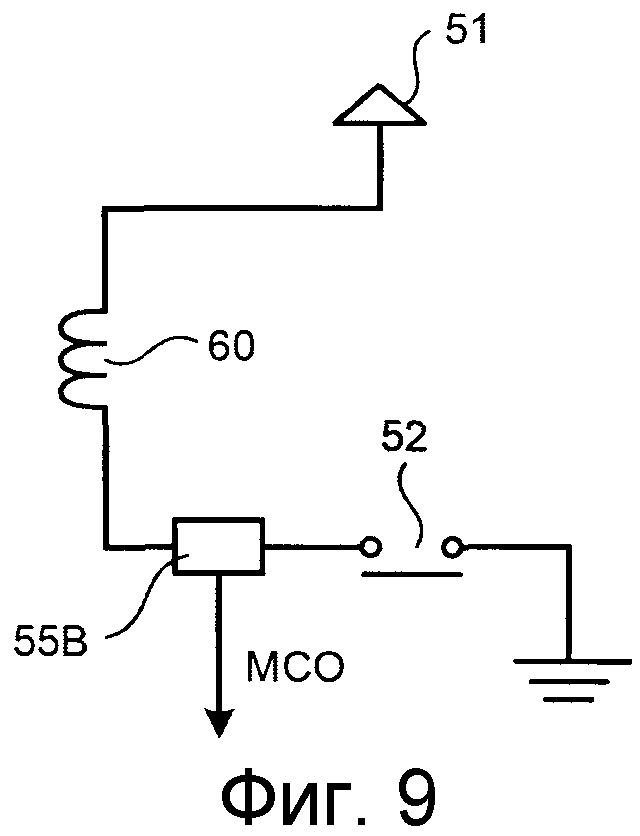
Фиг. 9 изображает примерную конфигурацию блока предварительного детектирования операции переключения для контроля тока возбуждения в катушке, показанной на фиг. 3.
Фиг. 10 изображает схему, показывающую примерную конфигурацию блока управления в первом варианте осуществления настоящего изобретения.
Фиг. 11 изображает временную диаграмму, показывающую операции в первом варианте осуществления настоящего изобретения.
Фиг.12 изображает примерную конфигурацию блока предварительного детектирования операции переключения для контроля смещения в электромагните и т.п.
Фиг.13 изображает схему, показывающую примерную конфигурацию блока управления во втором варианте осуществления настоящего изобретения.
Фиг.14 изображает временную диаграмму, показывающую операции во втором варианте осуществления настоящего изобретения.
Описание предпочтительных вариантов осуществления изобретения
Варианты осуществления устройства управления возбуждением электродвигателя переменного тока согласно настоящему изобретению подробно описываются со ссылкой на чертежи. Следует отметить, что настоящее изобретение не ограничено посредством этих вариантов осуществления.
Первый вариант осуществления
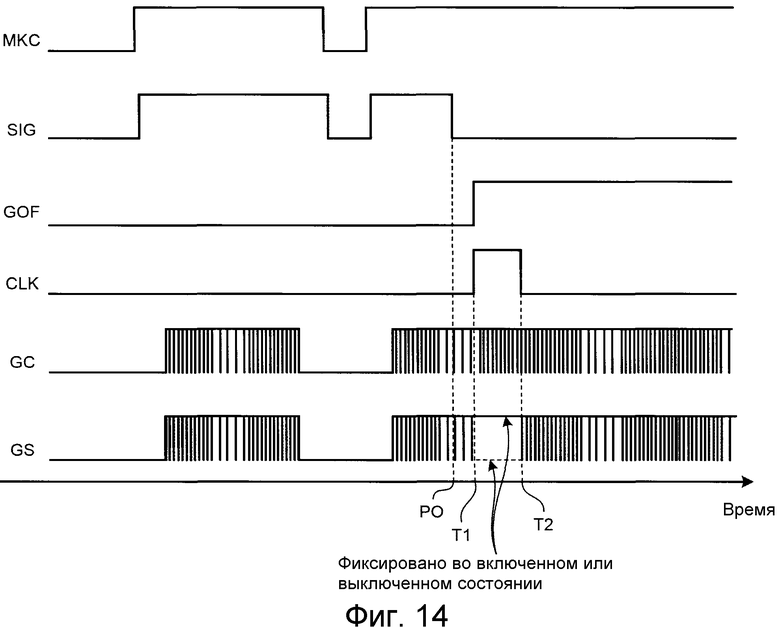
Фиг.1 изображает схему, показывающую примерную конфигурацию устройства 100 управления возбуждением электродвигателя переменного тока и соответствующих устройств, подключенных к нему, в первом или втором варианте осуществления настоящего изобретения. В частности, токосъемник 1 для приема энергии при контактировании с воздушным проводом; колесо 3 для приведения в движение электрического транспортного средства при контактировании с рельсом 2; устройство 100 управления возбуждением электродвигателя переменного тока и электродвигатель 6 переменного тока изображены на фиг.1. Устройство 100 управления возбуждением электродвигателя переменного тока, показанное на фиг.1, сконфигурировано с возможностью включать в себя, в качестве основных компонентов: размыкающий контактор LB источника питания в качестве блока переключения на стороне источника питания для приема энергии из токосъемника 1 и для переключения главной схемы на стороне источника питания; инвертор INV для выполнения преобразования энергии из энергии постоянного тока, принимаемой через проводник Р положительной стороны и проводник N отрицательной стороны, в энергию переменного тока; конденсатор FC, оба конца которого подключаются к проводнику Р положительной стороны и проводнику N отрицательной стороны; проводник UI U-фазы на стороне инвертора, проводник VI V-фазы на стороне инвертора и проводник WI W-фазы на стороне инвертора для передачи энергии переменного тока, преобразованной в инверторе INV, в нагрузку; размыкающий контактор ММК электродвигателя в качестве блока переключения на стороне электродвигателя, допускающий отключение вывода инвертора INV; функциональный блок 200 ММК для выполнения операции размыкания или операции замыкания размыкающего контактора ММК электродвигателя; и блок 10А управления для основного управления инвертором INV и размыкающим контактором ММК электродвигателя. Электродвигатель 6 переменного тока подключается к устройству 100 управления возбуждением через проводник UM U-фазы на стороне электродвигателя, проводник VM V-фазы на стороне электродвигателя и проводник WM W-фазы на стороне электродвигателя.
Фиг.2 изображает схему, показывающую примерную конфигурацию инвертора INV. Как показано на фиг.2, инвертор INV формируется так называемой схемой трехфазного двухуровневого инвертора и имеет структуру мостовой схемы, состоящей из шести переключающих элементов, т.е. элемента UP верхнего плеча U-фазы, элемента VP верхнего плеча V-фазы и элемента WP верхнего плеча W-фазы в качестве переключающих элементов плеча положительной стороны, подключенных к проводнику Р положительной стороны, и элемента UN нижнего плеча U-фазы, элемента VN нижнего плеча V-фазы и элемента WN нижнего плеча W-фазы в качестве переключающих элементов плеча отрицательной стороны, подключенных к проводнику N отрицательной стороны. Проводник UI U-фазы на стороне инвертора, проводник VI V-фазы на стороне инвертора и проводник WI W-фазы на стороне инвертора подключаются к точкам подключения между элементами верхнего плеча и элементами нижнего плеча на соответствующих фазах, соответственно. Как показано на фиг. 2, каждый из переключающих элементов формируется посредством IGBT-элемента и диодного элемента, подключенных встречно-параллельно. Следует отметить, что предпочтительной структурой инвертора INV является ШИМ-инвертор (PWM-инвертор) напряжения. Альтернативно, инвертор INV может быть схемой многоуровневого инвертора, к примеру, схемой трехуровневого инвертора, и переключающий элемент может формироваться посредством элемента, отличного от IGBT-элемента. Управление включением/выключением (управление переключением) выполняется для каждого из переключающих элементов на основе стробирующего сигнала GS, выведенного из блока 10A управления, который будет описан ниже. Хотя не показано на чертеже, размыкающий контактор LB источника питания размыкается или замыкается (выключается или включается) посредством блока 10A управления или блока управления системой, порядок которого выше блока 10A управления и который не показан на чертеже. Следует отметить, что стробирующий сигнал GS может рассматриваться в качестве характерного примера отдельного сигнала включения/выключения для каждого из элементов UP-WN или в качестве сигнала для совместного управления включением/выключением элементов UP-WN во включенное состояние или выключенное состояние.
На фиг. 1, размыкающий контактор MMK электродвигателя является контактором, допускающим отсекание переменного тока, и подключается между инвертором INV и электродвигателем 6 переменного тока. Поскольку точка перехода тока через нуль возникает один раз каждый полупериод формы сигнала тока в переменном токе, ток отсекается в этой точке перехода тока через нуль.
Фиг. 3 изображает схему для пояснения действующего блока MMK для управления размыкающим контактором MMK электродвигателя, показанного на фиг. 1, а фиг. 4 изображает схему, показывающую размыкающий контактор MMK электродвигателя и действующий блок MMK, в котором контакты замыкаются. Размыкающий контактор MMK электродвигателя формируется посредством вакуумного прерывателя 62, имеющего пару из подвижного контакта 64 и неподвижного контакта 63; и действующего электромагнита для управления переключением этого подвижного контакта 64. Если команда MKC переключения из блока 10A управления включается, катушка 60 действующего электромагнита в размыкающем контакторе MMK возбуждается, тем самым, притягивая якорь 61. Как результат, подвижный контакт 64 в зацеплении с якорем 61 приводится в действие вверх. Таким образом, контакты замыкаются, как показано на фиг. 4, тем самым, подключая проводник UM (или VM или WM) и проводник UI (или VI или WI) так, чтобы электрически подключать инвертор INV и электродвигатель 6 переменного тока. С другой стороны, размыкающая пружина 65 сжимается на фиг. 4, и, если команда MKC переключения выключается, катушка 60 больше не возбуждается, тем самым, понижая силу притяжения на якоре 61. Как результат, подвижный контакт 64 приводится в действие вниз посредством нагрузки размыкающей пружины 65, тем самым, размыкая контакты. Таким образом, главные контакты выключаются, тем самым электрически разъединяя инвертор INV и электродвигатель 6 переменного тока.
Следует отметить, что хотя фиг. 3 и 4, изображающие размыкающий контактор MMK, являются схемами однофазных структур, трехфазное устройство может быть сформировано посредством параллельного расположения трех идентичных структур. Электромагнит может предоставляться по отдельности для каждой из фаз, или механическое соединение может быть выполнено так, что один электромагнит совместно управляет трехфазными контактами. Кроме того, конфигурация по фиг. 3 или фиг. 4 является просто примером, и основная функция не изменяется, даже если размещение катушки 60 или вакуумного прерывателя 62 изменяется, чтобы уменьшать внешний размер размыкающего контактора MMK электродвигателя (в дальнейшем в этом документе, называемого просто "контактором"). Кроме того, хотя фиг. 3 и 4 изображают случай постоянно возбужденного контактора, это может быть защелкивающийся контактор, имеющий механизм для поддержания замкнутого состояния. В таком случае, может предоставляться размыкающая катушка для высвобождения защелки, и операция размыкания может быть выполнена посредством возбуждения размыкающей катушки. Электродвигатель 6 переменного тока подключается на следующей ступени контактора MMK через проводник UM U-фазы на стороне электродвигателя, проводник VM V-фазы на стороне электродвигателя и проводник WM W-фазы на стороне электродвигателя, и колеса 3, механически подключенные к электродвигателю 6 переменного тока, вращаются, чтобы приводить в движение электрическое транспортное средство. Следует отметить, что хотя электродвигатель 6 переменного тока предположительно является синхронным электродвигателем с постоянными магнитами, как описано выше, настоящее изобретение также является эффективным для электродвигателей, отличных от электродвигателя, содержащего постоянный магнит в роторе (например, для асинхронного электродвигателя и т.п.).
Между прочим, существует два вида коммутационных перенапряжений, касающихся вакуумных контактов, т.е. замыкающее перенапряжение и размыкающее перенапряжение. Размыкающее перенапряжение это явление, сгенерированное посредством действия, в котором отсекание переменного тока выполняется не в точке перехода тока через нуль, и ток быстро отключается (прерывается) перед точкой перехода тока через нуль, как показано на фиг. 5. Известно, что абсолютная величина Vs перенапряжения, сгенерированного в этот момент, представляется как Vs=√(L/C)*Ic. Здесь Ic обозначает уровень тока прерывания; L обозначает индуктивную составляющую схемы; и C обозначает емкостную составляющую схемы. Т.е. небольшой уровень Ic тока прерывания подразумевает, что сгенерированное перенапряжение прерывания является незначительно малым. Известно, что этот уровень тока Ic прерывания зависит от материала контактов для вакуумных контактов. В типичном размыкающем контакторе с вакуумными контактами выбирается предпочтительный материал контактов, и уровень тока Ic прерывания, следовательно, является малым. Таким образом, уровень перенапряжения Vs является незначительным.
Тем не менее, поскольку типичный вакуумный размыкающий контактор предположительно применяется в схеме переменного тока (схеме, сформированной посредством источника питания синусоидального переменного тока промышленной частоты, называемой в дальнейшем «схемой переменного тока») в распределительной подстанции класса среднего напряжения (3,3-33 кВ), типичный вакуумный размыкающий контактор не предназначен для использования в схеме переменного тока, управляемой посредством инвертора (в дальнейшем в этом документе, называемой "схемой инвертора").
Фиг. 6 изображает диаграмму фактических измерений, показывающую разность между уровнем тока Ic прерывания в схеме переменного тока и уровнем тока прерывания Ic в схеме инвертора. Эта диаграмма фактических измерений показывает результат эксперимента, осуществляемого авторами настоящего изобретения. Из результата по фиг. 6, при сравнении с уровнем тока Ic прерывания в схеме переменного тока, выявлено, что уровень тока Ic прерывания в схеме инвертора увеличен приблизительно в четыре раза относительно уровня тока Ic прерывания в схеме переменного тока. Хотя схема инвертора генерирует переменный ток на выходе посредством переключения (включения/выключения) множества переключающих элементов (UP, VP, WP, UN, VN и WN), показанных на фиг. 2, на высокой скорости, обнаружено, что такое включение/выключение имеет влияние на увеличение уровня тока Ic прерывания.
Т.е. в схеме инвертора напряжение, изменяющееся в импульсной форме, накладывается на напряжение между вакуумными контактами при операции переключения. Как результат, дуга между вакуумными контактами становится нестабильной, тем самым, формируя прерывание. С учетом этого, в первом варианте осуществления настоящего изобретения, блок 10A управления, имеющий конкретную конфигурацию, предоставляется, как показано на фиг. 1, с тем, чтобы заранее прогнозировать неожиданную операцию контактора MMK, тем самым, управляя операцией переключения инвертора INV.
Как показано на фиг. 1, блок 10A управления сконфигурирован с возможностью включать в себя блок 40 определения (блок определения отклонения) в качестве средства определения отклонения для определения отклонения между операцией переключения контактора MMK и командой MKC переключения; и блок 30 управления стробирующими сигналами для управления стробирующим сигналом. Базовый стробирующий сигнал GC, базовая команда MKC0 замыкания контактора (в дальнейшем в этом документе, называемая "командой замыкания") и сигнал MCO предварительного детектирования операции переключения (в дальнейшем в этом документе, называемый "сигналом предварительного детектирования") вводятся в блок 10A управления из внешнего блока управления системой (не показан на чертеже), находящегося на более высоком уровне, чем блок 10A управления. Следует отметить, что блок 40 определения и блок 30 управления стробирующими сигналами выступают в качестве блока 70 управления инвертора для выполнения управления включением/выключением для множества переключающих элементов.
Следует отметить, что базовый стробирующий сигнал GC генерируется посредством крутящего момента электродвигателя 6 переменного тока, чтобы ускорять или замедлять электрическое транспортное средство или посредством такого способа, как векторное управление, чтобы управлять числом оборотов, и он является сигналом, который должен быть командой включения/выключения для переключающих элементов, включенных в инвертор INV. Кроме того, команда MKC0 замыкания аналогично является сигналом, введенным из блока управления системой, который не показан на чертеже и порядок которого выше, чем у блока 10A управления, и является сигналом, который должен вводиться в блок 10A управления, чтобы включать контактор MMK, когда электродвигатель 6 переменного тока работает, и выключать контактор MMK, например, когда работа электродвигателя 6 переменного тока прекращается, или когда инвертор INV повреждается.
После этого ниже описывается подробная примерная конфигурация и работа блока 10A управления, содержащего вышеописанный блок 40 определения и блок 30 управления стробирующими сигналами.
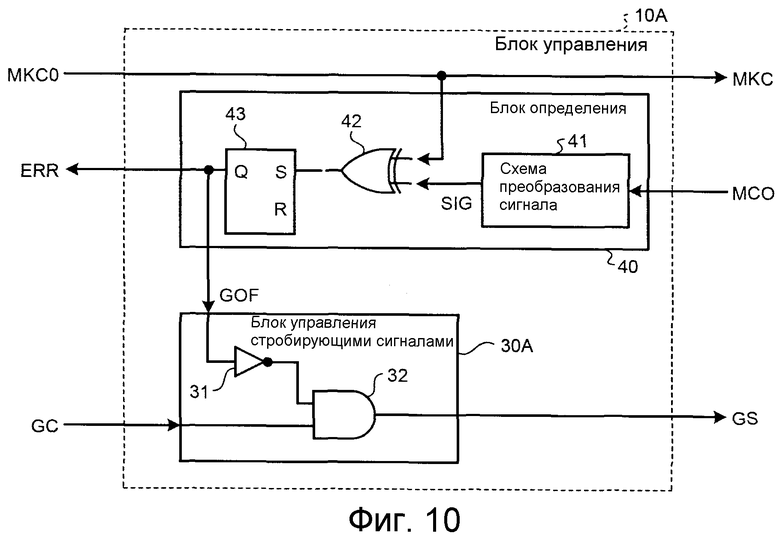
Фиг. 10 изображает схему, показывающую примерную конфигурацию блока 10A управления в первом варианте осуществления настоящего изобретения. Блок 10A управления сконфигурирован с возможностью включать в себя, в качестве основных компонентов, блок 40 определения и блок 30A управления стробирующими сигналами.
Во-первых, описывается блок 40 определения. Блок 40 определения сконфигурирован с возможностью включать в себя схему 41 преобразования сигнала, схему 42 исключающего «ИЛИ» (XOR) и защелкивающую схему 43. Команда MKC0 замыкания и сигнал MCO предварительного детектирования контактора MMK вводятся в блок 40 определения. Сигнал MCO предварительного детектирования преобразуется посредством схемы 41 преобразования сигнала к уровню напряжения (H-уровень или L-уровень) логической схемы с тем, чтобы выводиться в качестве сигнала SIG. Выходной сигнал исключающего «ИЛИ» из сигнала SIG и команды MKC0 замыкания выводится как сигнал GOF. Схема 41 преобразования сигнала может быть типичной ограничительной схемой или двоичной схемой. Поскольку она является, в общем, известной схемой, ее подробное описание опускается.
Работа сконфигурированного таким образом блока 40 определения описывается ниже. Когда команда MKC0 замыкания имеет H-уровень (включено), а сигнал SIG, указывающий предварительное детектирование операции переключения, имеет H-уровень (включено), несоответствие не возникает. Таким образом, XOR-вывод имеет L-уровень. Также, когда команда MKC0 замыкания и сигнал SIG имеют L-уровень (выключено), несоответствие не возникает. Таким образом, XOR-вывод имеет L-уровень. Однако, если сигнал SIG переключается на L-уровень (выключено), хотя команда MKC0 замыкания имеет H-уровень, сигнал (H-уровень) отклонения выводится из XOR. Как результат, сигнал GOF, удерживаемый в защелкивающей схеме 43, переключается на H-уровень и выводится в блок 30A управления стробирующими сигналами. Разумеется, также если команда MKC0 замыкания имеет L-уровень, и сигнал SIG имеет H-уровень, выходной сигнал GOF имеет H-уровень. Следует отметить, что, как только сигнал GOF, указывающий несоответствие, изменяется с L-уровня на H-уровень, сигнал отклонения выводится в качестве выходного сигнала ERR ошибки в блок управления системой верхнего порядка.
Затем описывается блок 30A управления стробирующими сигналами. Блок 30A управления стробирующими сигналами сконфигурирован с возможностью включать в себя логическую инвертирующую схему 31 и логическую схему 32 «И». Сигнал GOF и базовый стробирующий сигнал GC вводятся в блок 30A управления стробирующими сигналами, и стробирующий сигнал GS выводится из него. Работа сконфигурированного таким образом блока 30A управления стробирующими сигналами описывается ниже. Когда сигнал GOF, указывающий несоответствие, имеет L-уровень, базовый стробирующий сигнал GC выводится как есть в инвертор INV в качестве стробирующего сигнала GS. Однако, если сигнал GOF изменяется с L-уровня на H-уровень, стробирующий сигнал GS переключается на L-уровень (выключено), тем самым управляя операциями переключения (включения/выключения) всех переключающих элементов в инверторе INV в выключенное состояние. Следует отметить, что базовый стробирующий сигнал GC и стробирующий сигнал GS могут рассматриваться в качестве характерных примеров отдельных сигналов включения/выключения для элементов UP-WN или в качестве сигналов для совместного управления включением/выключением элементов UP-WN во включенное состояние или выключенное состояние.
После этого описывается работа согласно первому варианту осуществления. Например, когда контактор MMK имеет некоторое повреждение, например, когда разъединение в катушке 60, повреждение в реле 52, потеря управляемого источника 51 питания и т.п. возникают, ток возбуждения в катушке 60 теряется. Таким образом, как показано на фиг. 4, сила притяжения к якорю 61 теряется, тем самым, размыкая главные контакты в контакторе MMK.
Фиг. 7 является диаграммой для пояснения операций замыкания и размыкания вакуумного контактора в качестве контактора MMK. В момент PC1 времени, напряжение прикладывается к действующей катушке, и ток возбуждения подается в катушку. Ток катушки увеличивается с конечным наклоном вследствие влияния индуктивности обмотки. Когда достигается определенный уровень тока возбуждения, действующий электромагнит начинает операцию притяжения для якоря 61, и главные контакты в контакторе MMK входят в контакт друг с другом в момент времени C. Затем, если управляющий источник питания теряется в момент времени PO1 вследствие некоторого повреждения, приложенное напряжение между катушками уменьшается. Как результат, ток возбуждения теряется, и электромагнит тем самым выполняет операцию размыкания, приводя к размыканию главных контактов в момент O времени.
Фиг. 8 изображает примерную конфигурацию блока предварительного детектирования операции переключения для контроля разности потенциалов в катушке, показанной на фиг. 3, а фиг. 9 изображает примерную конфигурацию блока предварительного детектирования операции переключения для контроля тока возбуждения в катушке, показанной на фиг. 3. На фиг. 8 блок 55A предварительного детектирования операции переключения (в дальнейшем в этом документе, называемый просто "блоком предварительного детектирования ") является схемой деления напряжения и служит для выполнения преобразования к уровню напряжения, допускающему ввод в блок 10A управления. Типичный управляющий источник 51 питания является источником переменного тока 100 В или 110 В, постоянного тока 100 В и т.п. Входное напряжение в блок управления составляет 5 В, 12 В и т.п. Разумеется, блок 55A предварительного детектирования может быть интегрирован с другой схемой, к примеру, схемой 41 преобразования сигнала или системой так, что он включается в нее.
Здесь, как описано выше, если выполняется операция размыкания вследствие повреждения, хотя команда MKC0 замыкания выведена в контактор MMK, разность потенциалов в катушке 60 уменьшается. Таким образом, можно детектировать операцию размыкания в момент PO1 времени до момента O времени, в котором главные контакты размыкаются. Поскольку уменьшение напряжения определяется на основе того, ниже оно или нет порогового напряжения TH1, показанного на фиг. 7, посредством надлежащего выбора порогового напряжения TH1 в схеме 41 преобразования сигнала, можно не допускать ложного детектирования вследствие изменения в управляющем напряжении и точно детектировать операцию размыкания контактора MMK заранее.
Сигнал MCO приложенного к катушке напряжения (=сигнал предварительного детектирования операции переключения), детектированный в блоке 55A предварительного детектирования, показанном на фиг. 8, подвергается определению отличия от команды MKC0 замыкания в блоке 40 определения, показанном на фиг. 1. Если детектируется отличие между сигналом MCO приложенного к катушке напряжения и командой MKC0 замыкания, сигнал GOF для выполнения запирания выводится и доставляется в блок 30 управления стробирующими сигналами.
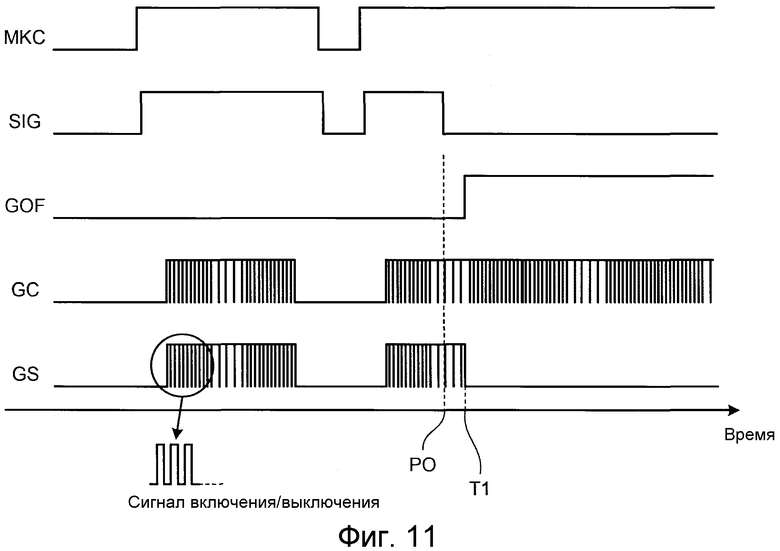
Фиг. 11 изображает временную диаграмму, показывающую операции в первом варианте осуществления настоящего изобретения. Как показано на фиг. 11, сигнал SIG переключается на L-уровень в момент PO времени, и сигнал GOF, указывающий несоответствие команд, тем самым переключается на H-уровень в момент T1 времени и вводится в блок 30 управления стробирующими сигналами. Затем, базовый стробирующий сигнал GC из системы управления верхнего порядка выключаются, тем самым, управляя всеми переключающими элементами в инверторе INV в выключенное состояние. Следует отметить, что он конфигурируется так, что работа по этому выключению завершается перед моментом O времени на фиг. 7. Поскольку разница во времени между моментом PO1 времени и моментом O времени составляет приблизительно 20-50 мс, это достаточное количество времени в качестве времени обработки. Следовательно, посредством управления переключающими элементами в инверторе INV так, что они выключаются, контактор MMK размыкается в состоянии, в котором напряжение, изменяющееся в импульсной форме, не накладывается между главными контактами, тем самым, получая преимущество в том, что генерирование опасного размыкающего перенапряжения, связанного с прерыванием, можно исключить.
Хотя напряжение между обоими концами катушки 60 в контакторе MMK контролируется на фиг. 8, ток возбуждения непосредственно в катушке 60 может контролироваться посредством детектора 55B тока в качестве блока предварительного детектирования операции переключения, как показано на фиг. 9. В зависимости от способов управления для тока возбуждения в контакторе MMK предусмотрен случай, в котором ток возбуждения подавляется в состоянии удерживания замыкания, чтобы подавлять потребляемую мощность вследствие тока возбуждения в состоянии удержания замыкания. В этом случае, как показано на фиг. 7, пороговый ток TH2 может задаваться так, что он меньше или равен току удержания. В этом случае, можно детектировать операцию размыкания размыкающего контактора MMK заранее в момент PO2 времени. Следует отметить, что поскольку типичная разница во времени между моментом PO2 времени и моментом O времени составляет приблизительно 20-50 мс, это достаточное количество времени в качестве времени обработки.
Кроме того, хотя фиг. 8 или фиг. 9 изображают пример, в котором функциональная схема катушки 60 электромагнита контролируется в качестве блока предварительного детектирования операции переключения, смещение в электромагните и т.п. (сердечника электромагнита или части механизма, которая описывается ниже) может контролироваться.
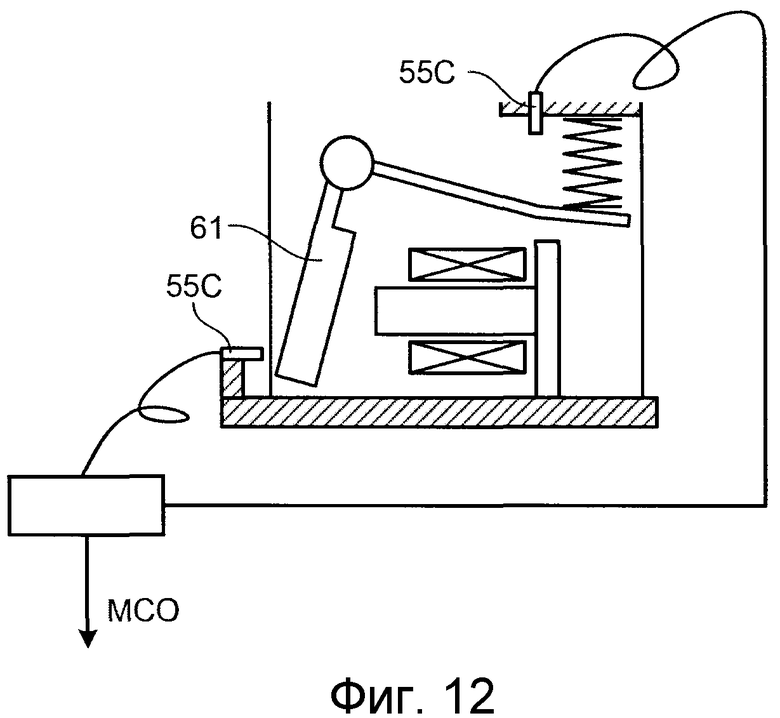
Фиг. 12 изображает примерную конфигурацию блока предварительного детектирования операции переключения для контроля смещения в электромагните и т.п. Фиг. 12 изображает увеличенный участок электромагнита и изображает якорь 61 и датчик расстояния для детектирования смещения в рычаге, который связан с якорем 61 и не показан на чертеже. Хотя датчик 55C малого расстояния на основе вихревых токов в данном документе показан как блок предварительного детектирования операции переключения, этот датчик 55C малого расстояния служит для вывода сигнала MCO предварительного детектирования только тогда, когда якорь 61 приближается к нему, и рычаг приближается к нему. Посредством регулирования положения датчика, как показано на фиг. 7, можно детектировать операцию замыкания в момент PC3 времени, который располагается до момента C времени, в который главные контакты замыкаются, если пороговое значение задается около замкнутого положения TH3C в смещении электромагнита. Кроме того, если пороговое значение задается равным окрестности TH3O разомкнутого положения в смещении электромагнита, можно детектировать операцию размыкания в момент PO3 времени, т.е. до момента O времени, в который размыкаются главные контакты. Разумеется, аналогичные эффекты получаются посредством использования общеизвестного датчика хода такого типа, в котором отраженный свет лазера считывается с помощью метода триангуляции или датчика хода с переменным сопротивлением, механически соединенного с движущейся частью в качестве блока для детектирования смещения в электромагните и т.п. Могут быть использованы и другие средства.
Хотя выше описано предварительное детектирование касательно операции размыкания главных контактов, следует понимать, что операция замыкания главных контактов может аналогично проводиться абсолютно идентичным образом. Как описано выше, блок 10A управления детектирует операцию переключения размыкающего контактора MMK электродвигателя до переключения (контакта или отсоединения) главных контактов и управляет инвертором INV так, чтобы не допускать наложения напряжения, изменяющегося в импульсной форме, между главными контактами размыкающего контактора MMK электродвигателя, по меньшей мере, во время, когда размыкающий контактор MMK электродвигателя отсекает или вводит ток в электродвигатель 6 переменного тока.
После этого ниже описываются преимущества, полученные в вышеописанной конфигурации. Типично, контактор MMK спроектирован с возможностью размыкаться или замыкаться в состоянии отсутствия напряжения, когда инвертор INV останавливается. Однако, если контактор MMK имеет некоторое повреждение, например, когда разъединение в катушке 60, повреждение в реле 52, потеря управляющего источника 51 питания и т.п. возникают, контактор MMK размыкается в то время, когда инвертор INV работает. До того, как главные контакты (63 и 64) контактора MMK размыкаются, устройство 100 управления возбуждением электродвигателя переменного тока согласно первому варианту осуществления детектирует такое размыкание заранее и управляет всеми переключающими элементами в инверторе INV в выключенное состояние. Таким образом, можно не допускать генерирования опасного размыкающего перенапряжения. Если инвертор INV повреждается, поскольку инвертор останавливается, опасное перенапряжение не генерируется, даже если выполняется операция размыкания. Следовательно, поскольку можно не допускать отрицательного эффекта на систему вследствие опасного перенапряжения, может быть получено высоконадежное устройство управления возбуждением электродвигателя переменного тока. Кроме того, также в случае, если контактор MMK ложно замыкается в то время, когда инвертор INV работает, все переключающие элементы в инверторе INV управляются в выключенное состояние посредством детектирования операции замыкания контактора MMK заранее. Таким образом, напряжение, изменяющееся в импульсной форме, не накладывается между главными контактами, тем самым, позволяя не допускать генерирования опасного замыкающего перенапряжения, связанного с прерыванием.
Кроме того, согласно устройству 100 управления возбуждением электродвигателя переменного тока в первом варианте осуществления, поскольку нет необходимости располагать определенное число ферритовых сердечников и разрядников, как в традиционной технологии, можно уменьшать размер самого устройства управления возбуждением электродвигателя переменного тока и уменьшать его вес. Таким образом, получаются такие преимущества, как уменьшение затрат на его изготовление и повышение эффективности использования энергии, когда электрическое транспортное средство движется.
Второй вариант осуществления
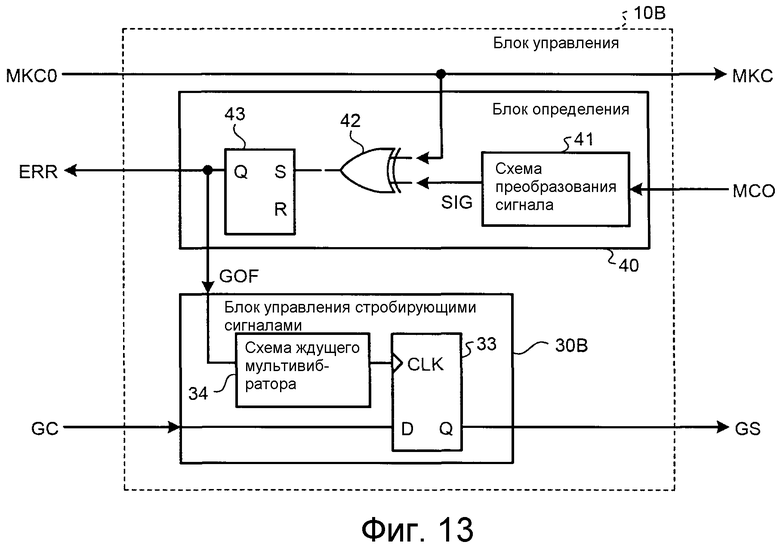
Фиг. 13 изображает схему, показывающую примерную конфигурацию блока 10B управления во втором варианте осуществления настоящего изобретения, а фиг. 14 изображает временную диаграмму, показывающую операции во втором варианте осуществления настоящего изобретения. Как показано на фиг. 13, конфигурация второго варианта осуществления отличается от первого варианта осуществления внутренней конфигурацией блока 30B управления стробирующими сигналами. Только участки, отличающиеся от первого варианта осуществления, описываются ниже.
Во-первых, описывается конфигурация блока 30B управления стробирующими сигналами. Блок 30B управления стробирующими сигналами сконфигурирован с возможностью включать в себя схему 34 ждущего мультивибратора и схему 33 мультивибратора D-типа. Сигнал GOF, выведенный из блока 40 определения, который определяет рабочее отклонение, вводится в схему 34 ждущего мультивибратора. Выходной сигнал схемы 34 ждущего мультивибратора и базовый стробирующий сигнал GC, введенный из блока управления системой, который не показан на чертеже и порядок которого выше, чем у блока 10B управления, вводятся в схему 33 мультивибратора D-типа.
Работа сконфигурированного таким образом блока 30B управления стробирующими сигналами описывается ниже. Сигнал GOF, который выводится из блока 40 определения и который указывает отклонение, вводится в схему 33 мультивибратора D-типа в качестве сигнала импульсной формы с шириной определенного периода времени, предварительно заданного посредством схемы 34 ждущего мультивибратора. Таким образом, после того, как сигнал GOF, указывающий отклонение, переключается на H-уровень с L-уровня, стробирующий сигнал GS, поддерживающий состояние базового стробирующего сигнала GC (в случае H-уровня, H-уровень поддерживается; и в случае L-уровня, L-уровень поддерживается), выводится в течение определенного периода времени, заданного в схеме ждущего мультивибратора.
Например, как показано на фиг. 14, когда базовый стробирующий сигнал GC является ШИМ-модулированным стробирующим сигналом, если сигнал SIG переключается на L-уровень в момент PO времени, ШИМ-модуляция маскируется в течение периода от момента T1 времени до момента T2 времени, тем самым, управляя переключением каждого из переключающих элементов (UP, VP, WP, UN, VN и WN) так, что они непрерывно включены (или выключены). Время маскирования, определенное в схеме 34 ждущего мультивибратора, предпочтительно задается так, что оно превышает период времени, продолжающийся вплоть до контакта или отсоединения главных контактов в контакторе MMK, и оно предпочтительно составляет приблизительно 50-150 мс. Следует отметить, что из функций блоков 10A и 10B управления, показанных в первом и втором вариантах осуществления, блок 40 определения может содержаться в контакторе MMK, и нет ограничения с точки зрения его положения установки.
После этого ниже описывается преимущество, полученное в вышеописанной конфигурации. Когда контактор MMK ложно срабатывает вследствие некоторой причины в то время, когда инвертор INV работает, перед переключением (контактом или отсоединением) главных контактов (63 и 64) контактора MMK, устройство 100 управления возбуждением электродвигателя переменного тока во втором варианте осуществления детектирует такое переключение заранее и управляет переключением каждого из переключающих элементов (UP, VP, WP, UN, VN и WN) в инверторе INV так, что они непрерывно включены (или выключены). Таким образом, напряжение между главными контактами сохраняется постоянным, и напряжение, изменяющееся в импульсной форме, не накладывается между главными контактами. Следовательно, можно не допускать генерирования опасного коммутационного перенапряжения, связанного с прерыванием контактора MMK.
Кроме того, согласно устройству 100 управления возбуждением электродвигателя переменного тока во втором варианте осуществления, поскольку нет необходимости располагать определенное число ферритовых сердечников и разрядников, как в традиционной технологии, можно уменьшать размер самого устройства управления возбуждением электродвигателя переменного тока и уменьшить его вес. Таким образом, обеспечивается преимущество повышения эффективности использования энергии, когда электрическое транспортное средство движется.
Третий вариант осуществления
Если включенное состояние или выключенное состояние в операции переключения временно поддерживаются, как показано во втором варианте осуществления, напряжение, асинхронное с вращением электродвигателя, прикладывается к электродвигателю переменного тока, приводя к возможности перегрузки по току или резкого повышения крутящего момента. С учетом этого, согласно третьему варианту осуществления, блок 70 управления инвертора управляет, в течение периода между моментом T1 времени и моментом T2 времени, состоянием переключения инвертора INV в состояние вектора нулевого напряжения (состояние, в котором все из набора переключающих элементов UP VP и WP стороны верхнего плеча включаются, а все из набора UN, VN и WN стороны нижнего плеча выключаются, или его противоположное состояние). Следует отметить, что предпочтительно управлять всеми переключающими элементами так, что они выключаются после момента T2 времени.
В вышеописанной конфигурации можно получать не только преимущества, идентичные преимуществам во втором варианте осуществления, но также и преимущество подавления резкого повышения крутящего момента или перегрузки по току, поскольку напряжение, приложенное к электродвигателю переменного тока в течение периода между моментом T1 времени и моментом T2 времени, может быть задано нулевым.
Следует отметить, что каждая из конфигураций, показанных в первом-третьем вариантах осуществления, является просто вариантом осуществления для выполнения настоящего изобретения, и изменения могут быть внесены посредством исключения части составляющих элементов или посредством добавления других известных элементов. Например, настоящее изобретение может осуществляться на практике без предоставления блока 40 определения. В частности, необходимо включать только блок управления инвертора для управления переключающими элементами в инверторе INV в случае, если переключение (контакт или отсоединение) главных контактов прогнозируется на основе сигналов MCO предварительного детектирования главного контакта из блоков 55A-55C предварительного детектирования так, чтобы предотвратить наложение напряжения, изменяющегося в импульсной форме, между главными контактами контактора MMK, по меньшей мере, во время, когда блок переключения на стороне электродвигателя отсекает ток в электродвигатель переменного тока.
Промышленная применимость
Как описано выше, настоящее изобретение может применяться к устройству управления возбуждением электродвигателя переменного тока, содержащемуся в электрических транспортных средствах, и настоящее изобретение является, в частности, полезным в качестве изобретения, допускающего предотвращение генерирования опасного коммутационного перенапряжения, связанного с переключением размыкающего контактора электродвигателя.
Список условных обозначений
1 - токосъемник
2 - рельс
3 - колесо
6 - электродвигатель переменного тока
10A, 10B - блок управления
30, 30A, 30B - блок управления стробирующими сигналами
31 - логическая инвертирующая схема
32 - логическая схема «И»
33 -схема мультивибратора D-типа
34 -схема ждущего мультивибратора
40 - блок определения (блок определения отклонения)
41 - схема преобразования сигнала
42 - схема исключающего «ИЛИ» (XOR)
43 - защелкивающая схема
51 - управляемый источник питания
52 - реле
55A, 55B, 55C - блок предварительного детектирования операции переключения
60 - катушка размыкающего контактора
61 - якорь
62 - вакуумный прерыватель
63 - неподвижный контакт
64 - подвижный контакт
65 - размыкающая пружина
70 - блок управления инвертора
100 - устройство управления возбуждением
200 - действующий блок MMK
ERR - выходной сигнал ошибки
FC - конденсатор
GC - базовый стробирующий сигнал
GOF - сигнал, указывающий отклонение
GS - стробирующий сигнал
Ic - уровень тока прерывания
INV - инвертор
LB - размыкающий контактор источника питания
MCO - сигнал предварительного детектирования операции переключения, сигнал приложенного к катушке напряжения
MKC - команда переключения
MKC0 - базовая команда замыкания контактора
MMK - размыкающий контактор электродвигателя
N - проводник отрицательной стороны
P - проводник положительной стороны
SIG - сигнал, указывающий предварительное детектирование операции переключения
TH1 - пороговое напряжение
TH2 - пороговый ток
TH3C - окрестность замкнутого положения
TH3O - окрестность разомкнутого положения
UI - проводник U-фазы на стороне инвертора
UM - проводник U-фазы на стороне электродвигателя
UN - элемент нижнего плеча U-фазы
UP - элемент верхнего плеча U-фазы
VI - проводник V-фазы на стороне инвертора
VM - проводник V-фазы на стороне электродвигателя
VN - элемент нижнего плеча V-фазы
VP - элемент верхнего плеча V-фазы
WI - проводник W-фазы на стороне инвертора
WM - проводник W-фазы на стороне электродвигателя
WN - элемент нижнего плеча W-фазы
WP - элемент верхнего плеча W-фазы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОДНОЙ КОНТРОЛЛЕР ДЛЯ ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2449445C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2008 |
|
RU2442274C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ | 2006 |
|
RU2401504C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 2007 |
|
RU2419953C1 |
| СИЛОВОЕ ПРЕОБРАЗОВАТЕЛЬНОЕ УСТРОЙСТВО | 2009 |
|
RU2466040C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ МНОГОФАЗНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНОЙ | 2011 |
|
RU2532415C2 |
| УСТРОЙСТВО ДЕТЕКТИРОВАНИЯ ОШИБОК ПОДКЛЮЧЕНИЯ | 2009 |
|
RU2497257C2 |
| ИНВЕРТОРНОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИНВЕРТОРОМ | 2011 |
|
RU2533167C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2009 |
|
RU2481693C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАРЯДКОЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2441776C1 |
Изобретение относится к области электротехники и может быть использовано для возбуждения синхронного электродвигателя транспортного средства. Технический результат заключается в том, чтобы не допускать генерирование опасного перенапряжения коммутации, связанного с переключением размыкающего контактора электродвигателя. Устройство управления возбуждением электродвигателя переменного тока, включающее в себя: инвертор (INV), имеющий множество переключающих элементов, подвергаемых управлению включением/выключением, для преобразования напряжения постоянного тока в напряжение переменного тока с требуемой частотой, чтобы возбуждать электродвигатель (6) переменного тока; размыкающий контактор (MMK) электродвигателя, подключенный между инвертором (INV) и электродвигателем (6) переменного тока; блок (55) предварительного детектирования операции переключения для детектирования операции переключения размыкающего контактора (MMK) электродвигателя до контакта или отсоединения главных контактов и вывода сигнала предварительного детектирования операции переключения; и блок (10А) управления, имеющий блок (70) управления инвертора для выполнения управления включением/выключением для множества переключающих элементов и управления переключением для размыкающего контактора (MMK) электродвигателя и управления инвертором (INV) на основе сигнала предварительного детектирования операции переключения. 4 н. и 9 з.п. ф-лы, 14 ил.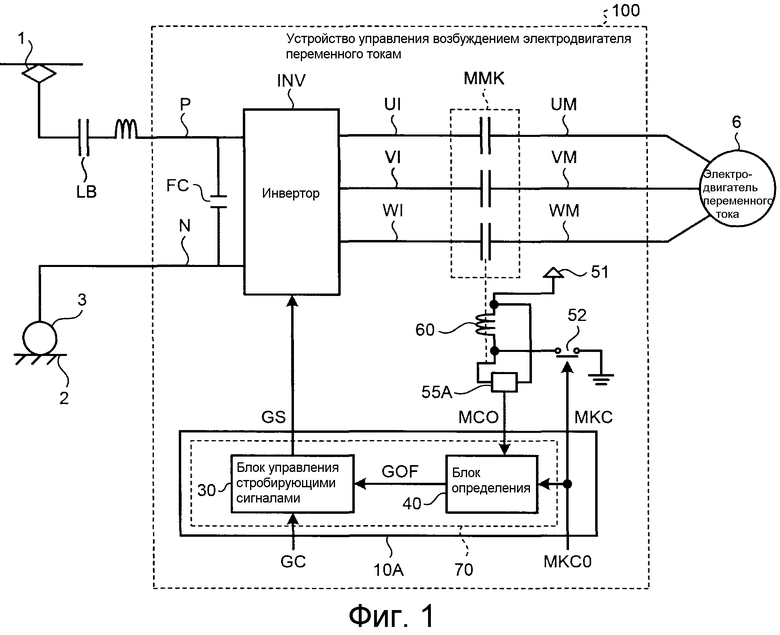
1. Устройство (100) управления возбуждением электродвигателя переменного тока, содержащее:
- инвертор (INV), включающий в себя множество переключающих элементов, подвергаемых управлению включением/выключением, для преобразования напряжения постоянного тока в напряжение переменного тока с требуемой частотой, чтобы возбуждать электродвигатель (6) переменного тока;
- блок переключения на стороне электродвигателя, подключенный между инвертором (INV) и электродвигателем (6) переменного тока;
- блок (55) предварительного детектирования операции переключения для детектирования операции переключения блока переключения на стороне электродвигателя до контакта или отсоединения главных контактов и вывода сигнала предварительного детектирования операции переключения; и
- блок (10) управления для выполнения управления включением/выключением для множества переключающих элементов и вывода стробирующего сигнала для установки всех переключающих элементов в инверторе в выключенное состояние на основе сигнала предварительного детектирования операции переключения.
2. Устройство (100) управления возбуждением электродвигателя переменного тока, содержащее:
- инвертор (INV), включающий в себя множество переключающих элементов, подвергаемых управлению включением/выключением, для преобразования напряжения постоянного тока в напряжение переменного тока с требуемой частотой, чтобы возбуждать электродвигатель (6) переменного тока;
- блок переключения на стороне электродвигателя, подключенный между инвертором (INV) и электродвигателем (6) переменного тока;
- блок (55) предварительного детектирования операции переключения для детектирования операции переключения блока переключения на стороне электродвигателя до контакта или отсоединения главных контактов и вывода сигнала предварительного детектирования операции переключения; и
- блок (10) управления для выполнения управления включением/выключением для множества переключающих элементов, причем блок (10) управления имеет блок (40) определения отклонения для определения разности между сигналом предварительного детектирования операции переключения и командой переключения блока переключения на стороне электродвигателя, при этом:
- блок (10) управления управляет инвертором (INV), когда отклонение определяется в блоке (40) определения отклонения.
3. Устройство (100) управления возбуждением электродвигателя переменного тока, содержащее:
- инвертор (INV), включающий в себя множество переключающих элементов, подвергаемых управлению включением/выключением, для преобразования напряжения постоянного тока в напряжение переменного тока с требуемой частотой, чтобы возбуждать электродвигатель (6) переменного тока;
- блок переключения на стороне электродвигателя, подключенный между инвертором (INV) и электродвигателем (6) переменного тока и имеющий вакуумный контакт;
- блок (55) предварительного детектирования операции переключения для детектирования операции переключения блока переключения на стороне электродвигателя до контакта или отсоединения главных контактов и вывода сигнала предварительного детектирования операции переключения; и
- блок (10) управления для выполнения управления включением/выключением для множества переключающих элементов, управления инвертором так, чтобы предотвращать наложение напряжения, изменяющегося в импульсной форме, между главными контактами блока переключения на стороне электродвигателя на основе сигнала (MCO) предварительного детектирования операции переключения, и управления всеми из множества переключающих элементов для перевода в выключенное состояние после прохождения предварительно определенного периода времени.
4. Устройство (100) управления возбуждением электродвигателя переменного тока, содержащее:
- инвертор (INV), включающий в себя множество переключающих элементов, подвергаемых управлению включением/выключением, для преобразования напряжения постоянного тока в напряжение переменного тока с требуемой частотой, чтобы возбуждать электродвигатель (6) переменного тока;
- блок переключения на стороне электродвигателя, подключенный между инвертором (INV) и электродвигателем (6) переменного тока;
- блок (55) предварительного детектирования операции переключения для детектирования операции переключения блока переключения на стороне электродвигателя до контакта или отсоединения главных контактов на основе напряжения, приложенного к действующему электромагниту для управления переключением подвижного контакта в блоке переключения на стороне электродвигателя, тока возбуждения в действующем электромагните или величины смещения подвижного блока в блоке переключения на стороне электродвигателя и вывода сигнала предварительного детектирования операции переключения; и
- блок (10) управления, имеющий блок (70) управления инвертора для выполнения управления включением/выключением для множества переключающих элементов и управления инвертором (INV) на основе сигнала предварительного детектирования операции переключения.
5. Устройство (100) управления возбуждением электродвигателя переменного тока по любому из пп.1-4, в котором блок (70) управления инвертора управляет инвертором (INV) так, чтобы предотвратить наложение напряжения, изменяющегося в импульсной форме, между главными контактами блока переключения на стороне электродвигателя, по меньшей мере, во время, когда блок переключения на стороне электродвигателя отсекает или вводит ток в электродвигатель (6) переменного тока.
6. Устройство (100) управления возбуждением электродвигателя переменного тока по любому из пп.1-4, в котором блок (70) управления инвертора
- включает в себя блок (40) определения отклонения для определения разности между сигналом предварительного детектирования операции переключения и командой переключения блока переключения на стороне электродвигателя, и
- управляет инвертором (INV), когда отклонение определено блоком (40) определения отклонения.
7. Устройство (100) управления возбуждением электродвигателя переменного тока по любому из пп.1, 3 или 4, в котором блок (10) управления включает в себя блок (40) определения отклонения для определения разности между сигналом предварительного детектирования операции переключения и командой переключения блока переключения на стороне электродвигателя.
8. Устройство (100) управления возбуждением электродвигателя переменного тока по любому из пп.2, 3 или 4, в котором блок (70) управления инвертора выводит стробирующий сигнал для перевода всех переключающих элементов в инверторе (INV) в выключенное состояние на основе сигнала предварительного детектирования операции переключения.
9. Устройство (100) управления возбуждением электродвигателя переменного тока по любому из пп.1-4, в котором блок (70) управления инвертора выводит стробирующий сигнал, поддерживающий переключение переключающих элементов в инверторе (INV) в предварительно определенном состоянии на основе сигнала предварительного детектирования операции переключения.
10. Устройство (100) управления возбуждением электродвигателя переменного тока по любому из пп.1-4, в котором блок (70) управления инвертора выводит стробирующий сигнал для задания вывода инвертора (INV) в состоянии вектора нулевого напряжения на основе сигнала предварительного детектирования операции переключения.
11. Устройство (100) управления возбуждением электродвигателя переменного тока по любому из пп.1-3, в котором блок (55) предварительного детектирования операции переключения детектирует операцию переключения блока переключения на стороне электродвигателя по напряжению, приложенному к действующему электромагниту для управления переключением подвижного контакта в блоке переключения на стороне электродвигателя.
12. Устройство (100) управления возбуждением электродвигателя переменного тока по любому из пп.1-3, в котором блок (55) предварительного детектирования операции переключения детектирует операцию переключения блока переключения на стороне электродвигателя по току возбуждения действующего электромагнита для управления переключением подвижного контакта в блоке переключения на стороне электродвигателя.
13. Устройство (100) управления возбуждением электродвигателя переменного тока по любому из пп.1-3, в котором блок (55) предварительного детектирования операции переключения детектирует операцию переключения блока переключения на стороне электродвигателя по величине смещения в подвижном блоке в блоке переключения на стороне электродвигателя.
| RU 2060174 C1, 20.06.1990 | |||
| Устройство для защиты асинхронного электропривода системы вентиляции вагонов | 1986 |
|
SU1393669A1 |
| US 7176653 B2, 13.02.2007 | |||
| JP 2008079496 A, 03.04.2008 | |||
| JP 2009142116 A, 25.06.2009 | |||
| УСОВЕРШЕНСТВОВАННЫЙ СПОСОБ И АППАРАТ ДЛЯ ОПРЕДЕЛЕНИЯ БАЛЛЬНОЙ ОЦЕНКИ УПИТАННОСТИ, ЖИВОГО ВЕСА И ИНДЕКСА ФЕРТИЛЬНОСТИ | 2016 |
|
RU2714709C2 |
| СПОСОБ ПОЛУЧЕНИЯ СОВМЕСТИМОСТИ ПАР ТРЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2119587C1 |

