Изобретение относится к тензометрическому датчику, положение и ориентация которого на поверхности объекта могут быть определены оптическим путем. Изобретение также относится к системе и способу определения пространственного положения подобных датчиков, расположенных на поверхности объекта, такого как конструкция летательного аппарата.
Известны прочностные испытания, проводимые для всего летательного аппарата для подтверждения прогнозирующих расчетов надежности, предварительно выполненных средствами компьютерного моделирования, прочностных характеристик новых авиационных конструкций (крылья летательных аппаратов и т.п.). Указанные прогнозирующие расчеты позволяют производителям заранее принимать стратегически важные решения в отношении разрабатываемых устройств.
Данные прочностные испытания обычно включают два типа испытаний: испытания на статическую нагрузку и испытания на динамическую усталость. В рамках указанных испытаний исполнительные механизмы создают нагрузки, которые прикладываются к конструкции летательного аппарата, для того чтобы, например, воссоздать определенные нагрузки, возникающие в полете.
Осуществляется постоянный контроль поведения конструкции в ответ на указанные нагрузки посредством датчиков, расположенных на поверхности конструкции, проходящей испытания.
Указанные датчики представляют собой тензометрические датчики, также известные как датчики напряжения; каждый датчик измеряет местную деформацию, испытываемую конструкцией.
Каждый из указанных тензометрических датчиков содержит элемент, выполненный с возможностью испытывать обратимое удлинение под действием силы, прикладываемой во время изменения сопротивления указанного элемента. Удлинение возникает вдоль оси, определяющей измерительную ось датчика. Измеряя эти малые колебания в сопротивлении, можно отследить деформации, возникающие в области измерения датчика в конструкции, проходящей испытания.
Однако для испытаний крупных объектов необходимо некоторое количество датчиков, обычно более 1000, вследствие чего используют многоканальные и специализированные системы сбора данных.
Учитывая, что каждый из датчиков устанавливается вручную на конструкции квалифицированными рабочими, данная операция установки является особенно трудоемкой, тем более что каждый датчик должен быть подключен к сети и откалиброван.
Каждый датчик должен быть помещен в точно определенное место на конструкции с тем, чтобы соответствовать проведенным вычислениям, а также должен быть обнаружен отдельно для сопоставления измерения с конкретной областью испытываемой конструкции.
Однако в расположении отдельных датчиков могут наблюдаться неточности, что приводит, например, к неточности в угловой ориентации измерительной оси указанных датчиков или даже неточности в их фактическом положении по отношению к их расчетному положению.
Эти неточности приводят к остаточным отклонениям, что нарушает сопоставление рассчитанной прочности и фактической прочности частей конструкции.
Следовательно, предпочтительно использовать систему, которая может легко определять точное положение и ориентацию датчиков на реальной конструкции для обеспечения более точного сопоставления поведения реальной конструкции с рассчитанными с помощью компьютерного моделирования показателями.
Таким образом, задача настоящего изобретения состоит в обеспечении наличия тензометрического датчика, который является простым в исполнении и использовании, который требует меньше затрат и который обеспечивает возможность точного определения положения датчика на поверхности конструкции в дополнение к его измерительной оси.
Изобретение также относится к системе и способу определения пространственного положения тензометрических датчиков, которые расположены на внешней поверхности объекта, такого как летательный аппарат, которые являются простыми в исполнении и в использовании, а также которые являются надежными и которые обеспечивают возможность обнаружения положений датчиков на поверхности объекта в реальном времени.
Для решения этой задачи предложено настоящее изобретение, которое относится к тензометрическому датчику, содержащему подложку для установки элемента, выполненного с возможностью испытывать обратимое удлинение под действием силы, прикладываемой во время изменения сопротивления указанного элемента, причем указанный элемент удлиняется вдоль измерительной оси датчика.
Тензометрический датчик согласно настоящему изобретению содержит по меньшей мере один контрастный объект, выполненный с возможностью отражения падающего светового пучка и расположенный на указанном датчике в заданном положении, что обеспечивает возможность определения центра и измерительной оси указанного датчика путем обнаружения положения указанного по меньшей мере одного контрастного объекта.
Предпочтительно, чтобы данная операция обнаружения, состоящая в обнаружении положений контрастных объектов, а следовательно, и датчиков, осуществлялась путем проекции светового изображения, выдаваемого источником света, например лазерным источником света, на поверхность объекта, и последующего обнаружения отражения указанного светового изображения конструкцией и объектами.
В различных вариантах реализации данного тензометрического датчика настоящее изобретение также относится к следующим параметрам, которые должны приниматься во внимание в отдельности или в соответствии с любым технически возможным сочетанием:
- указанный по меньшей мере один контрастный объект расположен на внешней поверхности подложки, поддерживающей указанный тензометрический датчик,
Указанный по меньшей мере один контрастный объект может быть, таким образом, напрямую встроен в тензометрический датчик.
В другом варианте этот или эти контрастные объекты могут выступать в качестве дополнительных компонентов. Только в целях пояснения, этот или эти контрастные объекты могут быть помещены на основание, такое как накладка, причем указанное основание содержит отверстие для установки тензометрического датчика, так что контрастный объект или объекты оказываются расположены по периметру датчика, который непосредственно соприкасается с поверхностью измеряемого объекта. Основание может иметь С-образную, U-образную или Т-образную форму или даже квадратную или прямоугольную форму и центральное отверстие, совпадающее по размерам с размерами датчика.
Тензометрический датчик содержит отдельный контрастный объект, содержащий по меньшей мере один маркирующий элемент для определения измерительной оси данного тензометрического датчика.
Только в целях пояснения, данный контрастный объект представляет собой диск, содержащий канавку, определяющий измерительную ось тензометрического датчика. В другом варианте контрастный объект может иметь форму эллипса или крестообразную форму, где одна из осей эллипса или одно из плечей креста соответственно задают измерительную ось тензометрического датчика.
Таким образом, положение центра тензометрического датчика задается заранее и известно по отношению к центру контрастного объекта.
Тензометрический датчик содержит два контрастных объекта, выровненных вдоль измерительной оси и расположенных равноудаленно от центра указанного тензометрического датчика.
Тензометрический датчик содержит три невыровненных контрастных объекта, расположенных на внешней поверхности указанной подложки таким образом, что обеспечена возможность определения центра тензометрического датчика способом триангуляции, причем один из этих контрастных объектов имеет форму, отличную от формы двух других контрастных объектов, и/или имеет размеры, отличные от их размеров, и расположен на измерительной оси, проходящей через центр указанного датчика.
Эти контрастные объекты представляют собой кругообразные светоотражающие объекты.
Кроме того, датчики содержат идентификационный элемент, расположенный на внешней поверхности указанной подложки и обеспечивающий возможность обнаружения каждого из датчиков в отдельности.
Идентификационный элемент может представлять собой этикетку, содержащую отчетливо написанный идентификационный код, например штрихкод, причем параметры этого идентификационного кода внесены в базу данных для сопоставления положения датчика и его идентификационного элемента. Предпочтительно, данная этикетка содержит полуперманентную клейкую поверхность на обратной стороне. В качестве варианта, этикетка может содержать металлическую рамку, выполненную из сплава с определенным составом, реагирующую только на заданную частоту.
Наконец, настоящее изобретение относится к системе для определения пространственного положения тензометрических датчиков, расположенных на внешней поверхности элемента конструкции.
Предложенная система согласно настоящему изобретению характеризуется тем, что:
- тензометрические датчики представляют собой вышеописанные тензометрические датчики,
- указанная система содержит оптическую измерительную систему для определения пространственного положения контрастных объектов или контрастного объекта в области контроля этой измерительной системы для каждого из указанных тензометрических датчиков в системе координат, связанной с элементом конструкции, и
- вычислительный блок для определения на основании пространственного положения этих контрастных объектов, расположенных в области контроля, положения центра каждого из тензометрических датчиков и ориентации указанного каждого датчика в системе координат, связанной с элементом конструкции.
Оптическая измерительная система представляет собой бесконтактную измерительную систему.
В других вариантах реализации данной системы для определения положения настоящее изобретение также относится к следующим параметрам, которые должны приниматься во внимание в отдельности или в соответствии с любым технически возможным сочетанием:
- оптическая измерительная система также содержит устройство для считывания информации с каждого из указанных идентификационных элементов для того, чтобы сопоставить идентификационные элементы датчиков с положением центра каждого датчика и ориентацией указанного каждого датчика в системе координат, связанной с элементом конструкции.
Идентификационный элемент датчика может содержать две этикетки, соединенные между собой разделительной линией, например линией наименьшего сопротивления или линией отрыва, так что этикетка может быть отсоединена и прикреплена к проводам датчика. Каждая из этих этикеток содержит, таким образом, один и тот же идентификационный код.
Оптическая измерительная система содержит самопозиционирующийся портативный датчик для пространственных измерений, содержащий лазерное проекционное устройство, пару по меньшей мере из двух линз и фотодетекторов, причем указанный датчик выполнен с возможностью формирования двумерных изображений от каждого фотодетектора, и по меньшей мере один блок обработки изображений для обработки указанной пары двумерных изображений.
В данном документе «самопозиционирующийся» означает, что система постоянно вычисляет свое положение и ориентацию на основании результатов наблюдений, получаемых при сканировании геометрии поверхности элемента конструкции. Для этого в системе используется способ триангуляции и содержится датчик, который обнаруживает точки на двумерной поверхности, возникающие при отражении лазерного излучения от поверхности элемента конструкции, и двумерные элементы определения положения, создаваемые при контроле элементов определения положения.
Предпочтительно оптическая измерительная система содержит измерительный датчик, содержащий проекционное устройство светового излучения для формирования светового изображения на поверхности указанного элемента конструкции по меньшей мере в области контроля, пару камер для получения пары двумерных изображений указанного светового изображения на поверхности элемента конструкции и по меньшей мере части элементов определения положения и систему координат измерительного датчика, причем указанные элементы определения положения соединены с элементом конструкции, так что элемент конструкции, а следовательно, и система координат элемента конструкции, могут перемещаться в пространстве, тогда как элементы для определения положения не перемещаются на элементе конструкции.
Датчик также содержит блок обработки изображения для извлечения из указанной пары двумерных изображений двух последовательностей точек двумерных поверхностей, образующихся от светового узора, и двух последовательностей двумерных элементов определения положения, образующихся из указанной по меньшей мере части последовательности элементов определения положения. Датчик также содержит вычислительный блок точек трехмерной поверхности для вычисления точек трехмерной поверхности в указанной системе координат измерительного датчика на основании двух последовательностей точек двумерной поверхности. Датчик также содержит вычислительный элемент трехмерного элемента определения положения для вычисления трехмерных элементов определения положения в указанной системе координат измерительного датчика на основании двух последовательностей двумерных элементов определения положения. Датчик также содержит сопрягающее устройство элементов определения положения для вычисления с помощью компьютера параметров преобразования для описания пространственного преобразования между указанной системой координат измерительного датчика и системой координат элемента конструкции, путем постановки в соответствие элементов между указанными вычисленными трехмерными элементами определения положения в указанной системе координат измерительного датчика и опорными трехмерными элементами определения положения в указанной системе координат элемента конструкции, причем указанные опорные трехмерные элементы определения положения получают на основании предыдущих результатов наблюдений. Датчик также содержит преобразователь точек трехмерной поверхности для преобразования указанных вычисленных точек трехмерной поверхности в указанной системе координат измерительного датчика в преобразованные точки трехмерной поверхности в указанной системе координат элемента конструкции путем использования параметров преобразования, преобразователь трехмерного элемента определения положения для преобразования указанных трехмерных элементов определения положения в указанной системе координат измерительного датчика в преобразованные трехмерные элементы определения положения в указанной системе координат элемента конструкции путем использования параметров преобразования и формирователь опорных элементов определения положения для накопления указанных трехмерных элементов определения положения для последующего использования и увеличения последовательности опорных трехмерных элементов определения положения. Подобная оптическая измерительная система описана в патентной заявке WO 2006/094409, поданной от имени CREAFORM Inc. Company.
В этой связи, пространственное портативное лазерное сканирующее устройство, поставляемое на рынок под названием HANDYSCAN 3D и производимое компанией CREAFORM Inc. company, Bélair Street, Lévis, Quebec G6V 6K9 CANADA, подходит для использования в этом изобретении.
Места поверхности в области контроля, получаемые проекцией светового изображения и обеспечивающие возможность определения геометрических характеристик элемента конструкции, содержат, в частности, контрастные объекты для каждого датчика.
Предпочтительно эти элементы определения положения являются элементами, присущими элементу конструкции или другим элементам.
Оптическая измерительная система содержит беспроводной передатчик для передачи пары двухмерных изображений от пространственного портативного измерительного датчика в блок обработки изображений,
- вычислительный блок соединен с запоминающим устройством, содержащим по меньшей мере один файл, получающий информацию о положении и ориентации каждого датчика в системе координат, связанной с указанным элементом конструкции в дополнение к результату измерения изменения в сопротивлении и к возможному обнаружению указанного датчика.
Наконец, изобретение относится к силоизмерительной системе элемента конструкции, которая содержит набор тензометрических датчиков, которые располагают на внешней поверхности указанного элемента конструкции, так что каждый один из тензометрических датчиков измеряет силу, прикладываемую к области указанного элемента конструкции, с которой тензометрический датчик находится в контакте, как изменение электрического сопротивления указанного тензометрического датчика, и блок электрической схемы, соединенный с указанным тензометрическим датчиком и преобразующий изменение сопротивления в выходной сигнал.
Силоизмерительная система согласно настоящему изобретению характеризуется тем, что:
- тензометрические датчики представляют собой вышеописанные тензометрические датчики,
- указанная система содержит оптическую измерительную систему для определения в области контроля этой измерительной системы пространственного положения контрастных объектов или контрастного объекта для каждого из указанных тензометрических датчиков в системе координат, связанной с элементом конструкции, и
- вычислительный блок для определения на основании пространственного положения контрастных объектов, расположенных в области контроля, положения центра каждого из тензометрических датчиков датчика и ориентации указанного каждого датчика в системе координат, связанной с элементом конструкции.
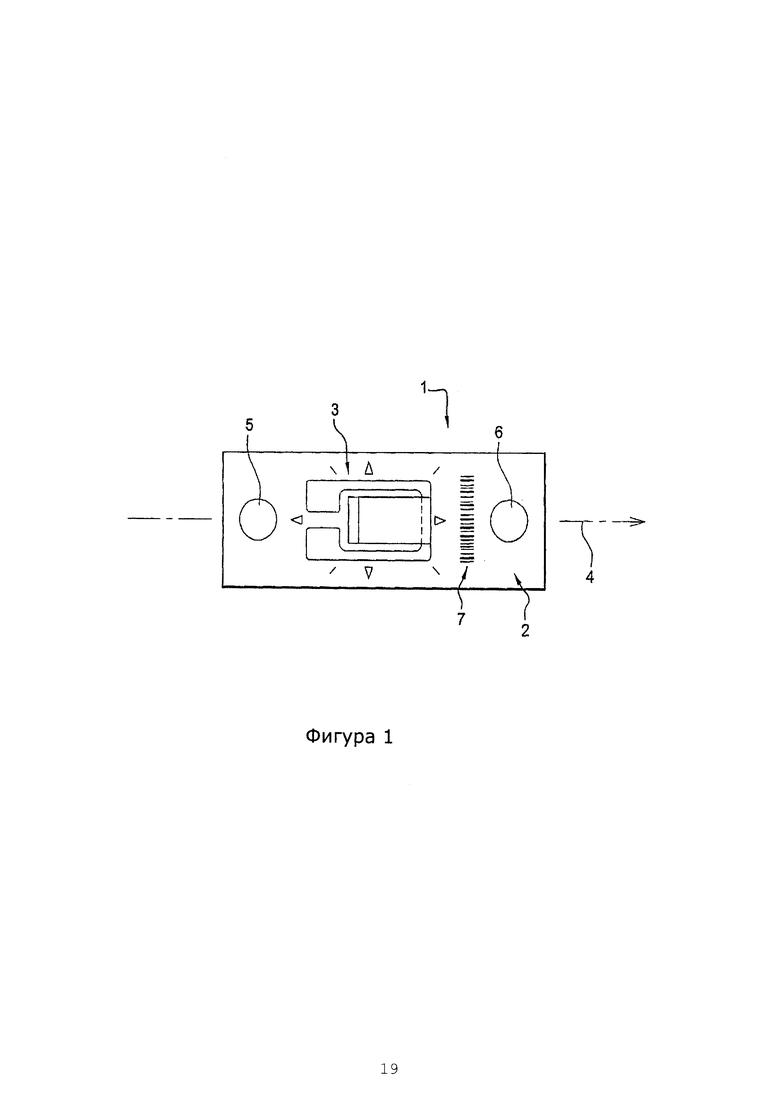
Изобретение далее описано более подробно со ссылкой на фигуру 1, на которой представлен тензометрический датчик согласно одному из предпочтительных вариантов реализации настоящего изобретения.
На чертеже представлен вид сверху тензометрического датчика по одному из предпочтительных вариантов реализации настоящего изобретения. Тензометрический датчик 1 содержит подложку 2 для монтажа элемента 3, предназначенного для обратимого удлинения под действием силы, прикладываемой во время отображения изменения сопротивления указанного элемента, указанный элемент 3 удлиняется вдоль измерительной оси 4 датчика.
Подложка 2 может быть гибкой изолирующей подложкой и может испытывать деформации конструкции, на данную подложку может быть нанесено покрытие для защиты элемента 3, предназначенного для удлинения.
Датчик 1 содержит два контрастных объекта 5 и 6, выполненных с возможностью отражения падающего светового пучка, причем контрастные объекты размещены на внешней поверхности поддерживающей подложки 2 в заданном месте, что обеспечивает возможность определения расчетного центра и измерительной оси 4 тензометрического датчика путем оптического определения положения контрастных объектов 5 и 6.
Указанные два контрастных объекта 5 и 6 выровнены вдоль измерительной оси 4 датчика и расположены равноудаленно от расчетного центра тензометрического датчика 1 таким образом, что определение указанных объектов 5 и 6 обеспечивает возможность простого определения положения центра и измерительной оси датчика 1. В данном примере эти контрастные объекты 5 и 6 представляют собой кругообразные светоотражающие объекты.
Предпочтительно, чтобы процесс обнаружения для определения положения контрастных объектов 5 и 6 осуществлялся путем проекции светового изображения, выдаваемого портативным пространственным лазерным сканирующим устройством, на поверхность указанных объектов и путем обнаружения отражения указанного светового изображения элементом конструкции и контрастными объектами 5 и 6 датчиков 1.
Кроме того, датчик содержит идентификационный элемент 7, помещенный на внешней поверхности подложки 2, указанный идентификационный элемент 7 обеспечивает возможность обнаружения каждого датчика 1 в отдельности. В данном варианте идентификационный элемент 7 представляет собой этикетку, содержащую штрихкод.
Оптическое считывающее устройство, выполненное на портативном пространственном лазерном сканирующем устройстве, одновременно определяет положение контрастных объектов 5 и 6 в системе координат, связанной с элементом конструкции летательного аппарата.
Указанное портативное пространственное лазерное сканирующее устройство выполнено самопозиционирующимся и обеспечивает возможность определения положения контрастных объектов 5 и 6 в реальном времени.
Только в целях пояснения, световое изображение, проектируемое данным пространственным лазерным сканирующим устройством на поверхности элемента конструкции, может быть крестообразным.
Изобретение также относится к способу определения пространственного положения тензометрических датчиков, расположенных на внешней поверхности элемента конструкции. Каждый указанный тензометрический датчик содержит подложку для установки элемента, выполненного с возможностью испытывать обратимое удлинение под действием силы, прикладываемой во время изменения сопротивления указанного элемента, указанный элемент удлиняется вдоль измерительной оси датчика.
Каждый из этих тензометрических датчиков содержит по меньшей мере один контрастный объект, выполненный с возможностью отражения падающего светового пучка, причем эти контрастные объекты расположены на датчиках в заданном положении, что обеспечивает возможность определения центра и измерительной оси указанного датчика путем определения положения указанного по меньшей мере одного контрастного объекта.
Задается система координат, связанная с элементом конструкции. Оптическая измерительная система перемещается на внешней поверхности элемента конструкции, определяя в области контроля системы пространственное положение контрастного объекта (объектов) каждого из указанных тензометрических датчиков в указанной системе координат.
На основании пространственного положения контрастных объектов, расположенных в области контроля, определяют положение центра каждого из датчиков в дополнение к ориентации указанного каждого датчика в системе координат, связанной с элементом конструкции.
Предпочтительно, чтобы идентификационный элемент каждого тензометрического датчика, расположенный в области контроля, определялся в одно и то же время.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА КОНТРОЛИРУЕМЫХ ПАРАМЕТРОВ В МНОЖЕСТВЕ ЛОКАЛЬНЫХ ОБЛАСТЕЙ С ИСПОЛЬЗОВАНИЕМ МАРКИРОВОК | 2014 |
|
RU2598290C2 |
| СПОСОБ ОПТИЧЕСКОЙ МАРКИРОВКИ МУЗЕЙНЫХ ЦЕННОСТЕЙ | 2009 |
|
RU2413989C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И/ИЛИ ОРИЕНТАЦИИ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2013 |
|
RU2595621C2 |
| ПОЛЯРИЗАЦИОННО-ФОТОННЫЙ ДЕТЕКТОР НИЗКОКОНТРАСТНЫХ ИЗОБРАЖЕНИЙ НА ОСНОВЕ ТВЕРДОТЕЛЬНЫХ КАРТИННО ОРИЕНТИРОВАННЫХ ЛИНЕЙНЫХ МИКРОПОЛЯРИЗАТОРОВ | 2023 |
|
RU2831223C1 |
| Триангуляционный метод измерения площади участков поверхности внутренних полостей объектов известной формы | 2017 |
|
RU2655479C1 |
| ОПТИЧЕСКИЙ СОЛНЕЧНЫЙ ДАТЧИК | 2013 |
|
RU2517979C1 |
| ГИБКИЙ КАБЕЛЬ СО ВСТРОЕННЫМИ ДАТЧИКАМИ ДЛЯ ДИНАМИЧЕСКОГО ОТСЛЕЖИВАНИЯ ИНСТРУМЕНТА | 2011 |
|
RU2597136C2 |
| СПОСОБ АНИЗОТРОПНОЙ РЕГИСТРАЦИИ СВЕТОВОГО ПОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2790049C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНОЙ ГЕОМЕТРИИ ВЫПУКЛЫХ И ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 2019 |
|
RU2708940C1 |
| СПОСОБ ФОТОГРАММЕТРИЧЕСКОГО ИЗМЕРЕНИЯ РАЗМЕРОВ И КОНТРОЛЯ ФОРМЫ ТЕЛА, ОГРАНИЧЕННОГО НАБОРОМ СВЯЗАННЫХ МЕЖДУ СОБОЙ ПОВЕРХНОСТЕЙ | 2013 |
|
RU2522809C1 |
Изобретения относятся к измерительной технике, в частности к конструкции тензометрического датчика, системе определения его пространственного положения, способу определения его пространственного положения и измерительной системе с использованием тензометрического датчика. Тензометрический датчик (1) содержит подложку (2) для установки элемента (3), подвергаемого обратимому удлинению под действием силы, прикладываемой во время изменения сопротивления указанного элемента (3), и выполненного с возможностью удлинения вдоль измерительной оси указанного датчика. Согласно настоящему изобретению тензометрический датчик (1) содержит, по меньшей мере, один контрастный объект (5, 6), выполненный с возможностью отражения падающего светового пучка и расположенный на датчике (1) в заданном положении по отношению к измерительной оси (4) тензометрического датчика (1) и по отношению к центру тензометрического датчика (1), что обеспечивает возможность определения центра и измерительной оси (4) тензометрического датчика (1) путем обнаружения положения указанного, по меньшей мере, одного контрастного объекта (5, 6), который представляет собой светоотражающий объект. 4 н. и 10 з.п. ф-лы, 1 ил. 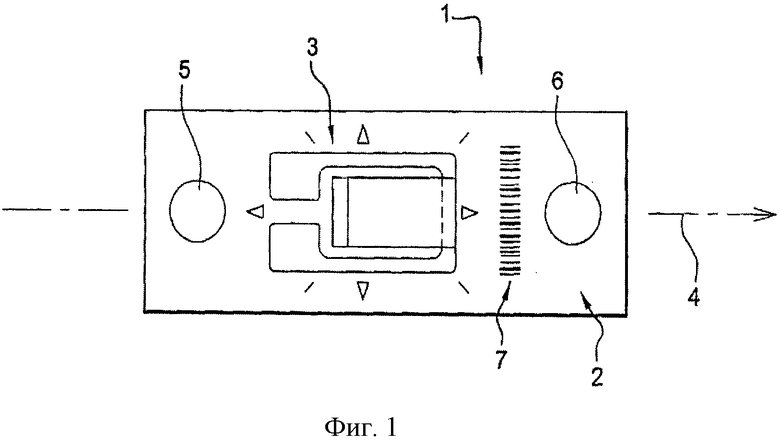
1. Тензометрический датчик (1), содержащий:
подложку (2) для установки элемента (3), подвергаемого обратимому удлинению под действием силы, прикладываемой во время изменения сопротивления указанного элемента (3), и выполненного с возможностью удлинения вдоль измерительной оси указанного датчика (1),
причем тензометрический датчик (1) характеризуется тем, что он содержит по меньшей мере один контрастный объект (5, 6), выполненный с возможностью отражения падающего светового пучка и расположенный на указанном датчике (1) в заданном положении по отношению к измерительной оси (4) тензометрического датчика (1) и по отношению к центру этого тензометрического датчика (1), что обеспечивает возможность определения центра и измерительной оси (4) тензометрического датчика (1) путем обнаружения положения указанного по меньшей мере одного контрастного объекта (5, 6), который представляет собой светоотражающий объект.
2. Датчик по п. 1, характеризующийся тем, что он содержит отдельный контрастный объект (5, 6), содержащий по меньшей мере один маркирующий элемент для определения измерительной оси (4) тензометрического датчика (1).
3. Датчик по п. 1, характеризующийся тем, что он содержит два контрастных объекта (5, 6), выровненных вдоль указанной измерительной оси (4) и расположенных равноудаленно от центра тензометрического датчика (1).
4. Датчик по п. 1, характеризующийся тем, что он содержит три невыровненных контрастных объекта (5, 6), расположенных на внешней поверхности подложки (2) таким образом, что обеспечена возможность определения центра тензометрического датчика (1) способом триангуляции, причем один из указанных контрастных объектов (5, 6) имеет форму, отличную от формы двух других контрастных объектов (5, 6), и/или размеры, отличные от их размеров, и расположен на измерительной оси (4), проходящей через центр тензометрического датчика (1).
5. Датчик по п. 1, характеризующийся тем, что контрастные объекты (5, 6) представляют собой кругообразные светоотражающие объекты.
6. Датчик по любому из пп. 1-5, характеризующийся тем, что он также содержит идентификационный элемент (7), расположенный на внешней поверхности подложки (2) и обеспечивающий возможность индивидуальной идентификации указанного датчика (1).
7. Система для определения пространственного положения тензометрических датчиков, расположенных на внешней поверхности элемента конструкции, причем указанная система характеризуется тем, что:
- указанные тензометрические датчики представляют собой тензометрические датчики (1) по любому из пп. 1-6,
- указанная система содержит оптическую измерительную систему для определения в области контроля этой измерительной системы пространственного положения контрастных объектов или контрастного объекта (5, 6) каждого из тензометрических датчиков (1) в системе координат, связанной с элементом конструкции, и
- вычислительный блок для определения, на основании пространственного положения контрастных объектов (5, 6), расположенных в области контроля, положения центра каждого из указанных датчиков (1) и ориентации указанного каждого датчика (1) в системе координат, связанной с элементом конструкции.
8. Система по п. 7, характеризующаяся тем, что ее оптическая измерительная система также содержит устройство для считывания информации с каждого из указанных идентификационных элементов (7) для того, чтобы соотносить эти идентификационные элементы указанных датчиков (1) с положением центра каждого датчика (1) и ориентацией указанного каждого датчика (1) в системе координат, связанной с элементом конструкции.
9. Система по п. 7, характеризующаяся тем, что ее оптическая измерительная система содержит самопозиционирующийся портативный датчик для осуществления пространственных измерений, содержащий лазерное проекционное устройство, пару по меньшей мере из двух линз и фотодетекторов и выполненный с возможностью формирования двухмерных изображений от каждого фотодетектора, и по меньшей мере один блок обработки изображений для обработки указанной пары двухмерных изображений.
10. Система по п. 9, характеризующаяся тем, что оптическая измерительная система содержит беспроводной передатчик для передачи указанной пары двухмерных изображений от портативного датчика для осуществления пространственных измерений в блок обработки изображений.
11. Система по любому из пп. 7-10, характеризующаяся тем, что вычислительный блок соединен с запоминающим устройством, содержащим по меньшей мере один файл, получающий информацию о положении и ориентации каждого датчика (1) в системе координат, связанной с элементом конструкции, в дополнение к результату измерения изменения в сопротивлении и к обнаружению указанного датчика (1).
12. Способ определения пространственного положения тензометрических датчиков, расположенных на внешней поверхности элемента конструкции, причем указанный способ характеризуется тем, что:
- указанные тензометрические датчики представляют собой тензометрические датчики (1) по любому из пп. 1-6,
- задают систему координат, связанную с элементом конструкции,
- перемещают оптическую измерительную систему на внешней поверхности элемента конструкции для определения в области контроля этой измерительной системы пространственного положения контрастных объектов (5, 6) каждого из тензометрических датчиков (1) в системе координат,
- определяют на основании пространственного положения контрастных объектов (5, 6), расположенных в области контроля, положение центра каждого датчика (1) в дополнение к ориентации указанного каждого датчика (1) в системе координат, связанной с элементом конструкции.
13. Способ по п. 12, характеризующийся тем, что идентификационный элемент (7) каждого из тензометрических датчиков (1), расположенных в области контроля, определяют одновременно.
14. Силоизмерительная система элемента конструкции, содержащая:
набор тензометрических датчиков, выполненных с возможностью их расположения на внешней поверхности указанного элемента конструкции таким образом, что каждый из указанных тензометрических датчиков определяет деформацию, относящуюся к области указанного элемента конструкции, с которой указанный каждый тензометрический датчик находится в контакте, как изменение электрического сопротивления указанного каждого тензометрического датчика, и
блок электрической схемы, соединенный с указанным каждым тензометрическим датчиком и преобразующий изменение эклектического сопротивления в выходной сигнал,
причем указанная силоизмерительная система характеризуется тем, что:
- указанные тензометрические датчики представляют собой тензометрические датчики (1) по любому из пп. 1-6,
- указанная система содержит оптическую измерительную систему для определения в области контроля этой измерительной системы пространственного положения контрастных объектов или контрастного объекта (5, 6) каждого из указанных тензометрических датчиков (1) в системе координат, связанной с элементом конструкции, и
- вычислительный блок для определения на основании пространственного положения контрастных объектов (5, 6), расположенных в области контроля, положения центра каждого из указанных датчиков (1) и ориентации указанного каждого датчика (1) в системе координат, связанной с элементом конструкции.
| JP 2009047501 A 05.03.2009 | |||
| US 6724930 B2 20.04.2004 | |||
| EP 0001914684 A1 23.04.2008. |

