Изобретение относится к бесконтактным методам получения больших объемов информации для создания детальных трехмерных цифровых и графических моделей как отдельных сложнопрофильных изделий, так и трехмерных моделей объемных конструкций на разных этапах их изготовления.
Известны способы видеограмметрического контроля размеров и форм поверхностей, заключающиеся в измерении положения облака точек с помощью двух видеокамер (Сердюков В.М. Фотограмметрия в промышленности и в гражданском строительстве. М.: Недра, 1977). Недостатками такого метода являются низкая производительность и необходимость получения довольно большого количества снимков.
Известен способ измерения геометрических параметров поверхностей сложнопрофилированных объектов и устройство для его осуществления (патент РФ №2243503, G01B 11/24, 2001 г.). Способ включает направление на контролируемую поверхность узкого лазерного луча, прием с другого углового направления отраженного лазерного луча на интегральную многоэлементную фотолинейку, обработку видеосигнала, по которому определяют дальность до каждой точки контролируемой поверхности по оси Z, перемещение контролируемого объекта по оси X и/или Y, одновременную автоматическую фиксацию координат каждой точки контролируемой поверхности в памяти ПЭВМ для определения фактического профиля контролируемой поверхности. Кроме того, дополнительно осуществляют прием луча, прошедшего через контролируемую поверхность, фиксируют координаты точек начала и конца сквозного прохода луча, соответствующие кромке контролируемой поверхности или кромке отверстия на ней в памяти компьютера для определения координат точек на контролируемой поверхности.
Недостатком такого способа является невозможность измерять форму поверхности больших объектов.
Известен способ оптического измерения формы поверхности (патент РФ №2448323, G01B 11/24, 2010 г.). Способ включает проецирование на измеряемую поверхность набора изображений с заданной структурой светового потока, регистрацию набора, соответствующих изображений поверхности при ее наблюдении под углом, отличным от угла проецирования набора изображений, и определение формы измеряемой поверхности по зарегистрированным изображениям. Предварительно определяют переотражающие участки измеряемой поверхности, при освещении которых под углом проецирования набора изображений возникает паразитная засветка других участков измеряемой поверхности. Переотражающие участки при проецировании набора изображений затеняют и определяют форму освещенных участков. Затем, проецируя набор изображений с заданной структурой светового потока на ранее затененные переотражающие участки, определяют форму поверхности на переотражающих участках.
Данным способом невозможно контролировать размеры поверхностей, кроме того, для реализации данного метода в производственных условиях требуются определенные условия по освещенности, что не всегда возможно.
Известен способ автоматизированного измерения с использованием модели внешней среды в стереотелевизионной системе технического зрения (патент РФ №2148794, G01C 11/26, 1997 г.). Способ автоматизированного измерения объектов внешней среды с использованием ее геометрической трехмерной модели в стереотелевизионной системе технического зрения, заключающийся в получении стереопары в виде левого и правого оцифрованных изображений с помощью двух телекамер, образующих стереосистему, сопряженную с ПЭВМ, фрагментации левого изображения, выделении на фрагменте одной из интересующих точек поверхности объекта, выделении фрагмента правого изображения в соответствии с расчетным диапазоном параллаксов, выделении на фрагменте правого изображения группы отождествляемых элементов, поиске корреспондирующей пары упомянутой точки на множестве элементов группы, вычислении параллакса корреспондирующей пары, вычислении пространственных координат этой точки и построении модели объекта по вычисленным координатам точек его поверхности, после построения модели объекта выбирают требуемый ракурс осмотра модели объекта, подводят курсор к модели объекта, вычисляют по уравнению поверхности и двумерным координатам курсора трехмерные координаты точки поверхности, вычисляют двумерные координаты этой точки на плоскости визуализируемого изображения, одного из указанной стереопары, и отображают точку с двумерными координатами на выведенном на экран монитора изображении, при этом отображение точки устанавливается на интересующее оператора место на изображении объекта, считывают трехмерные координаты точки поверхности наблюдаемого объекта.
Данный способ не дает возможности измерять и контролировать форму измеряемого объекта без участия оператора.
Наиболее близким является способ фотограмметрического измерения размеров и контроля формы тела, ограниченного набором связанных между собой поверхностей (патент РФ №2522809, G01B 11/24, 2013 г.). Способ заключается в определении координат набора точек нескольких поверхностей с помощью двух видеокамер и определении взаимного расположения поверхностей, не видимых одновременно с одного ракурса установки видеокамер, с помощью нескольких точечных маркеров, закрепленных на периферии, видимых одновременно с тех же ракурсов, что и поверхности измеряемого объекта.
Недостатком данного способа является необходимость размещения маркеров на поверхности измеряемого объекта или его периферии, причем пространственное положение этих маркеров определяется при измерении поверхностей с различных сторон, что неизбежно вносит дополнительные погрешности.
Задачей изобретения является повышение точности измерений и возможность измерения полной трехмерной геометрии выпуклых и протяженных объектов оптическим способом.
Поставленная задача решается тем, что в способе бесконтактного измерения трехмерной геометрии выпуклых и протяженных объектов, включающем в себя определение координат точек связанных между собой поверхностей измеряемого объекта с помощью двух видеокамер и определение взаимного расположения измеренных поверхностей, не видимых одновременно с одного ракурса установки видеокамер, с помощью нескольких маркеров (не менее 3 штук), видимых одновременно с тех же ракурсов, что и измеренные поверхности объекта, при этом маркеры на поверхности измеряемого объекта формируют дистанционно с помощью одного или нескольких источников излучения, согласно изобретению, маркеры формируют на пересечении поверхностей, которые затруднительно измерить одновременно с одного ракурса видеокамер.
Предлагаемое изобретение позволяет связать между собой различные измеренные фрагменты с точностью, ограниченной используемой оптической системой. При этом измерения этих же фрагментов или их других участков могут повторяться для накопления большого объема измерений и увеличения точности за счет осреднения. С другой стороны, предлагаемая процедура измерения может быть применена для измерения другого фрагмента поверхности, граничащего с одним из измеренных фрагментов. В результате измеренный сектор поверхности будет увеличен. Данный подход позволяет последовательно измерить всю поверхность измеряемого объекта. Таким образом, технический результат предлагаемого изобретения: повышение точности измерений и возможность измерения полной трехмерной геометрии выпуклых и протяженных объектов оптическим способом.
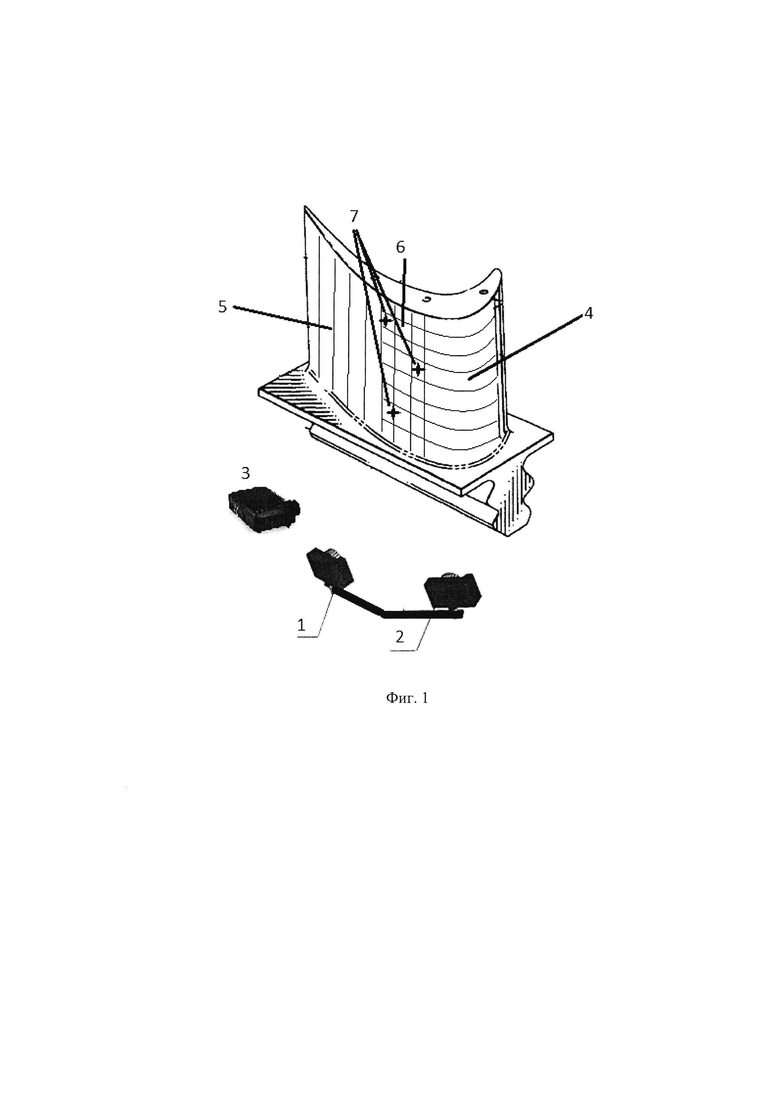
Устройство, реализующее предлагаемый способ представлено на фиг. 1. Устройство состоит из двух измерительных видеокамер 1 и 2, положение которых друг относительно друга не изменяется в процессе измерения и источник излучения 3, формирующий световые маркеры 7 на поверхности измеряемого объекта.
Предлагаемый способ заключается в следующем. Поверхность измеряемого объекта «разбивают» на фрагменты 4 и 5, которые затруднительно измерить одновременно с одного ракурса видеокамер 1 и. 2. Причем существует участок поверхности 6, который одновременно является частью фрагментов поверхности 4 и 5, так как виден обеим видеокамерам, как с ракурса измерения фрагмента поверхности 4, так и с ракурса измерения фрагмента поверхности 5. На участке поверхности 6 с помощью источника излучения 3 формируют световые маркеры, которые остаются неподвижными в процессе измерения фрагментов поверхностей 4 и 5. С помощью двух измерительных видеокамер 1 и 2, установленных в положении, из которого виден фрагмент поверхности
4, определяют координаты точек на фрагменте поверхности 4 и точечных маркеров 7 в системе координат А, связанной с положением измерительных видеокамер 1 и 2. Затем видеокамеры 1 и 2 устанавливают в положение, из которого виден фрагмент поверхности
5, и снова определяют координаты точек фрагмента поверхности 5 и световых маркеров 7 в системе координат Б, связанной с новым положением измерительных видеокамер.
Координаты световых маркеров 7 в системах, координат А и Б позволяют связать между собой эти координатные системы и рассчитать трехмерную геометрию фрагментов поверхности 4 и 5 и их взаимное положение в любой удобной системе координат.
Технический результат - повышение точности измерений и возможность измерения полной трехмерной геометрии выпуклых и протяженных объектов оптическим способом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОТОГРАММЕТРИЧЕСКОГО ИЗМЕРЕНИЯ РАЗМЕРОВ И КОНТРОЛЯ ФОРМЫ ТЕЛА, ОГРАНИЧЕННОГО НАБОРОМ СВЯЗАННЫХ МЕЖДУ СОБОЙ ПОВЕРХНОСТЕЙ | 2013 |
|
RU2522809C1 |
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ | 2010 |
|
RU2448323C1 |
| Триангуляционный метод измерения площади участков поверхности внутренних полостей объектов известной формы | 2017 |
|
RU2655479C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГЕОМЕТРИЧЕСКОГО ПОЛОЖЕНИЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА ПО ДАННЫМ ТРЕХМЕРНОГО СКАНИРОВАНИЯ ПОВЕРХНОСТЕЙ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2754961C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ОБЪЕКТОВ, ИМЕЮЩИХ НА ИЗОБРАЖЕНИИ РАСФОКУСИРОВАННЫЕ ГРАНИЦЫ | 2004 |
|
RU2280838C2 |
| СПОСОБ ЛАЗЕРНОГО ВИДЕОИЗМЕРЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ | 2007 |
|
RU2338998C1 |
| Способ измерения формы, размеров и упругих свойств внутренней поверхности пустотелых объектов, способ построения трехмерной модели внутренней поверхности пустотелых объектов, устройство для измерения формы, размеров и упругих свойств внутренней поверхности пустотелых объектов, а также построения трехмерной модели внутренней поверхности пустотелых объектов | 2017 |
|
RU2672807C2 |
| Способ взаимной калибровки видеокамеры и устройства многолучевого лазерного подсвета | 2024 |
|
RU2840117C1 |
| УСТРОЙСТВО СТЕРЕОВИДЕНИЯ В РЕАЛЬНОМ ВРЕМЕНИ | 2011 |
|
RU2474973C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИЧНОСТИ ЧЕЛОВЕКА | 2012 |
|
RU2488882C1 |
Изобретение относится к бесконтактным методам получения больших объемов информации для создания детальных трехмерных цифровых и графических моделей как отдельных сложнопрофильных изделий, так и трехмерных моделей объемных конструкций на разных этапах их изготовления. Способ бесконтактного измерения трехмерной геометрии выпуклых и протяженных объектов включает в себя определение координат точек связанных между собой поверхностей измеряемого объекта с помощью двух видеокамер и определение взаимного расположения измеренных поверхностей, не видимых одновременно с одного ракурса установки видеокамер, с помощью нескольких маркеров (не менее 3 штук), видимых одновременно с тех же ракурсов, что и измеренные поверхности объекта. При этом маркеры на поверхности измеряемого объекта формируют дистанционно с помощью одного или нескольких источников излучения на пересечении поверхностей, которые затруднительно измерить одновременно с одного ракурса видеокамер. Технический результат - повышение точности измерений и возможность измерения полной трехмерной геометрии выпуклых и протяженных объектов оптическим способом. 1 ил.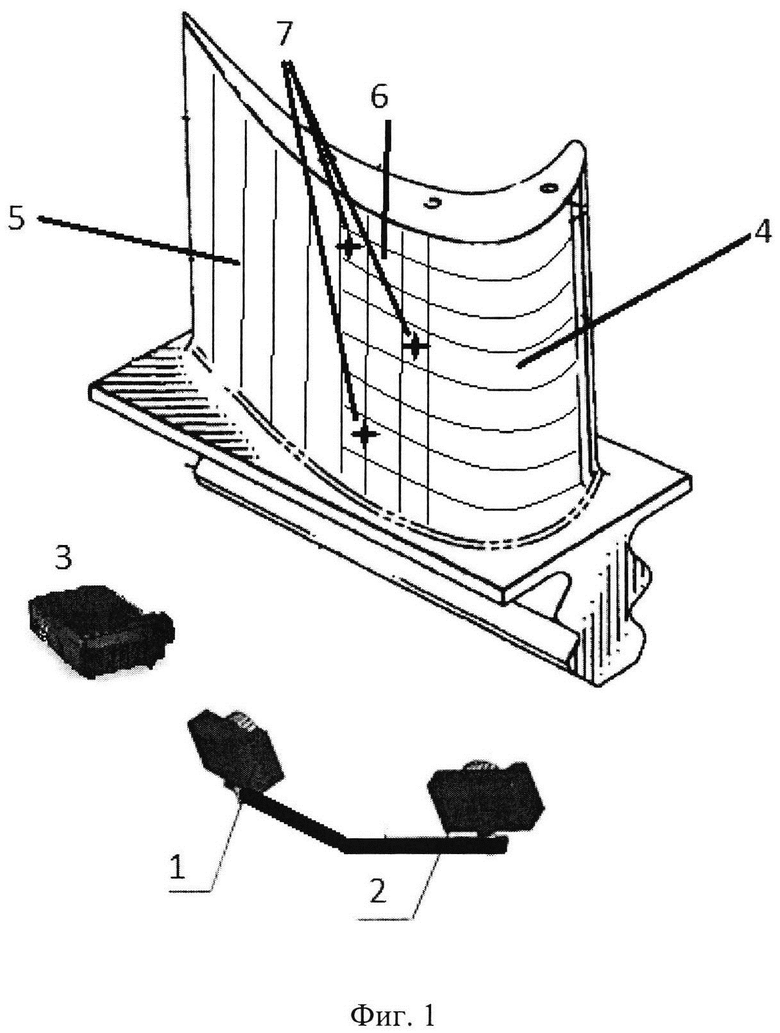
Способ бесконтактного измерения трехмерной геометрии выпуклых и протяженных объектов, включающий в себя определение координат точек связанных между собой поверхностей измеряемого объекта с помощью двух видеокамер и определение взаимного расположения измеренных поверхностей, не видимых одновременно с одного ракурса установки видеокамер, с помощью нескольких маркеров (не менее 3 штук), видимых одновременно с тех же ракурсов, что и измеренные поверхности объекта, при этом маркеры на поверхности измеряемого объекта формируют дистанционно с помощью одного или нескольких источников излучения, отличающийся тем, что маркеры формируют на пересечении поверхностей, которые затруднительно измерить одновременно с одного ракурса видеокамер.
| СПОСОБ БЕСКОНТАКТНЫХ ИЗМЕРЕНИЙ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2551396C1 |
| ТЕПЛОГЕНЕРАТОР ДЛЯ НАГРЕВА ЖИДКОСТИ | 2006 |
|
RU2313737C1 |
| Устройство для моделирования процессов при автоматическом регулировании | 1945 |
|
SU67706A1 |
| СПОСОБ ФОТОГРАММЕТРИЧЕСКОГО ИЗМЕРЕНИЯ РАЗМЕРОВ И КОНТРОЛЯ ФОРМЫ ТЕЛА, ОГРАНИЧЕННОГО НАБОРОМ СВЯЗАННЫХ МЕЖДУ СОБОЙ ПОВЕРХНОСТЕЙ | 2013 |
|
RU2522809C1 |

