Область техники
Настоящее изобретение относится к способу отклонения потока из насоса в многонасосной системе.
Уровень техники
По мере того как цены на топливо продолжают расти, уменьшение потребления топлива становится все более важным, например, на строительном рынке. Например, это важно в Северной Америке, и особенно важно в таких регионах мира, как, например, Индия. В связи с увеличением цен на топливо и требований к повышению общей эффективности транспортного средства производителей просят найти новые способы уменьшения гидравлической мощности, потребляемой во время работы. Многие из этих решений представляют собой относительно дорогостоящие и сложные системы, такие как ограничительные клапаны давления и насосы с объемным регулированием. Эти системы также относительно чувствительны к проблемам, связанным с загрязнением.
Существуют гидравлические системы, которые используют клапаны с открытым центром и шестеренчатые насосы с постоянным расходом. Клапан с открытым центром имеет нейтральное положение, которое позволяет текучей среде течь непрерывно через клапан, в отличие от клапана с закрытым центром, который блокирует текучую среду от течения через клапан в его нейтральном положении. Гидравлические системы, которые используют клапаны с открытым центром и шестеренчатые насосы с постоянным расходом, имеют тенденцию быть относительно простыми, экономичными и терпимыми к загрязнению.
Однако такие системы имеют тенденцию быть неэффективными. Значительная часть энергии тратится впустую в результате полного потока насоса через клапаны с открытым центром, когда поток не нужен.
Сущность изобретения
Согласно первому объекту настоящего изобретения создано рабочее транспортное средство, содержащее: резервуар для текучей среды; группу насосов, содержащую первый насос с постоянным расходом и второй насос с постоянным расходом, причем потоки первого и второго насосов параллельны друг другу; исполнительный механизм; распределительный клапан с открытым центром, расположенный по текучей среде между группой насосов и исполнительным механизмом; электрогидравлический отклонитель, соединенный по текучей среде с точкой между вторым насосом и распределительным клапаном и с резервуаром для текучей среды, для отклонения потока от второго насоса к резервуару для текучей среды, когда отклонитель открыт; датчик скорости, установленный для измерения параметра скорости рабочего транспортного средства, или устройство ввода оператора, выполненное с возможностью ручного выбора настройки отклонения вне зависимости от любого положения сиденья рабочего транспортного средства; и контроллер, выполненный с возможностью: принятия сигнала скорости, показывающего параметр скорости, или сигнала настройки отклонения, показывающего выбранную настройку отклонения, определения, удовлетворяет ли параметр скорости заданному критерию скорости, или определения состояния выбранной настройки отклонения, и выдачи команды отклонителю на открытие, если параметр скорости удовлетворяет заданному критерию скорости, или если выбранная настройка отклонения находится в состоянии отклонения потока.
В примере рабочее транспортное средство содержит датчик скорости, установленный, чтобы определять параметр скорости. В таком случае контроллер может принимать сигнал скорости, показывающий параметр скорости, определять, удовлетворяет ли параметр скорости заданному критерию скорости (например, параметр скорости представляет собой, по меньшей мере, порог скорости), и давать команду отклонителю открыться, если параметр скорости удовлетворяет заданному критерию скорости. Этот режим отклонения потока в материалах настоящей заявки указывается ссылкой как режим отклонения потока скорости. Режим отклонения потока скорости уменьшает потери гидравлической мощности, способствуя эффективности использования топлива во время движения рабочего транспортного средства на скорости (иногда указываемого ссылкой как "перемещение" или "езда по дороге" рабочего транспортного средства).
Предпочтительно, параметр скорости представляет собой показатель скорости относительно земли рабочего транспортного средства.
Предпочтительно, контроллер выполнен с возможностью определения, является ли параметр скорости, по меньшей мере, порогом скорости, и, если так, выдачи команды отклонителю на открытие.
Предпочтительно, рабочее транспортное средство содержит переключатель передаточного отношения и датчик передаточного отношения, выполненный с возможностью определения передаточного отношения, выбранного с помощью переключателя передаточного отношения, причем контроллер выполнен с возможностью принятия сигнала скорости, показывающего скорость относительно земли рабочего транспортного средства, в качестве параметра скорости, и сигнала передаточного отношения, показывающего выбранное передаточное отношение, определения, является ли скорость относительно земли, по меньшей мере, порогом скорости, и является ли выбранное передаточное отношение, по меньшей мере, порогом передаточного отношения, и выдачи команды отклонителю на открытие, если скорость относительно земли является, по меньшей мере, порогом скорости, и выбранное передаточное отношение является, по меньшей мере, порогом передаточного отношения.
Предпочтительно, контроллер выполнен с возможностью выдачи команды отклонителю на закрытие, если скорость относительно земли является, по меньшей мере, порогом скорости, но выбранное передаточное отношение ниже порога передаточного отношения.
Предпочтительно, рабочее транспортное средство содержит устройство ввода оператора, выполненное с возможностью ручного выбора настройки отклонения независимо от любого положения сиденья рабочего транспортного средства, при этом контроллер выполнен с возможностью принятия сигнала настройки отклонения, показывающего выбранную настройку отклонения, определения состояния выбранной настройки отклонения и выдачи команды отклонителю на открытие, если выбранная настройка отклонения находится в состоянии отклонения потока.
Предпочтительно, устройство ввода оператора содержит экранный монитор, выполненный с возможностью ручного выбора настройки отклонения.
Предпочтительно, запрос отклонения оператора представляет собой прямой запрос от оператора.
Предпочтительно, контроллер выполнен с возможностью выдачи команды отклонителю на закрытие, если выбранная настройка отклонения находится в состоянии неотклонения потока.
Предпочтительно, рабочее транспортное средство представляет собой экскаваторную погрузочную машину, имеющую экскаваторный режим, чтобы управлять экскаваторной секцией экскаваторной погрузочной машины, и погрузочный режим, чтобы управлять погрузочной секцией экскаваторной погрузочной машины, причем контроллер выполнен с возможностью выдачи команды отклонителю на открытие в каждом из погрузочного режима и экскаваторного режима, если выбранная настройка отклонения находится в состоянии отклонения потока.
В другом примере рабочее транспортное средство содержит устройство ввода оператора, выполненное с возможностью ручного выбора настройки отклонения, вне зависимости от любого положения сиденья рабочего транспортного средства. В таком случае контроллер выполнен с возможностью принимать сигнал настройки отклонения, определять состояние выбранной настройки отклонения и давать команду отклонителю открыться, если выбранная настройка отклонения находится в состоянии отклонения потока. Оператор, таким образом, может отклонить поток второго насоса по своему усмотрению (ради простоты, "оператор" в качестве используемого в материалах настоящей заявки означает человек-оператор). Оператор может пожелать сделать так, чтобы, например, поспособствовать эффективности использования топлива во время режима холостого хода или чтобы осуществлять относительно точное управление инструментом рабочего транспортного средства (например, во время операций подъема краном, например, когда экскаваторная секция экскаваторной погрузочной машины может быть использована, чтобы переместить трубу или чтобы передвинуть крышку люка, переносимую ковшом экскаваторной секции). Этот режим отклонения потока в материалах настоящей заявки указывается ссылкой как режим отклонения потока оператора.
Датчик скорости может быть сконфигурирован большим многообразием способов. Например, датчик скорости может быть установлен, чтобы определять скорость вращения двигательной установки рабочего транспортного средства, такой как, например, трансмиссии, двигателя, главной передачи, элемента сцепления с землей и т.д. В другом примере датчик скорости может быть выполнен с возможностью определять актуальную скорость относительно земли рабочего транспортного средства и, по существу, может быть, например, радиолокационным устройством или устройством GPS (устройством глобальной системы определения положения). В другом примере параметр скорости может быть передаточным отношением. Как в каждом из этих примеров, параметр скорости может быть показателем скорости относительно земли рабочего транспортного средства.
Устройство ввода оператора для ручного выбора настройки отклонения может быть сконфигурировано большим многообразием способов. Например, устройство ввода оператора может содержать экранный монитор, выполненный с возможностью ручного выбора настройки отклонения. Экранный монитор может иметь одну или более кнопку, чтобы перейти к соответствующему экрану меню и выбрать состояние отклонения потока или состояние неотклонения потока. В других примерах устройство 36 ввода оператора может иметь автономное устройство вдобавок к экранному монитору для перехода по экранам меню и вариантам выбора и выбора желаемой настройки. Автономное устройство может заменить одну или более из кнопок 60, 62, 64. В еще одних, других примерах устройство 36 ввода оператора для ручного выбора настройки отклонения может включать в себя автономное устройство, но не экранный монитор. Автономное устройство может принимать форму, например, одной или более кнопок, наборного диска, ползунка, тумблера, переключателя или тому подобного, и датчика положения, если необходимо, чтобы определять положение автономного устройства.
Запрос отклонения оператора может быть прямым запросом от оператора, в противоположность запросу, который может быть выведен из или быть следствием другого запроса оператора (например, вращение сиденья оператора из обращения в первом направлении в обращение в противоположное второе направление).
Согласно второму объекту настоящего изобретения создано рабочее транспортное средство, содержащее: гидравлическую систему, содержащую резервуар для текучей среды, группу насосов, содержащую первый насос с постоянным расходом и второй насос с постоянным расходом, причем потоки первого и второго насосов параллельны друг другу, исполнительный механизм, распределительный клапан с открытым центром, расположенный по текучей среде между группой насосов и исполнительным механизмом, электрогидравлический отклонитель, соединенный по текучей среде с точкой между вторым насосом и распределительным клапаном и с резервуаром для текучей среды, для отклонения потока от второго насоса к резервуару для текучей среды, когда отклонитель открыт, и датчик давления, установленный для измерения давления подачи в гидравлической системе; устройство ввода оператора, выполненное с возможностью ручного выбора настройки порога давления; и контроллер, выполненный с возможностью: принятия сигнала давления подачи, показывающего давление подачи, и сигнала порога давления, показывающего выбранную настройку порога давления, определения, является ли давление подачи, по меньшей мере, выбранной настройкой порога давления, и, если так, выдачи команды отклонителю на открытие. Этот режим отклонения потока в материалах настоящей заявки указывается ссылкой как режим отклонения потока давления.
Предпочтительно, устройство ввода оператора содержит экранный монитор, выполненный с возможностью ручного выбора настройки порога давления.
Оператор может, таким образом, выбирать настройку порога давления по необходимости. Более низкая настройка порога давления может иметь тенденцию способствовать преобладанию эффективности использования топлива над производительностью (производительность измеряется, например, на основе времени цикла, например, что касается экскаваторной погрузочной машины или другого рабочего транспортного средства, которое может выполнять большей частью повторяющиеся операции), тогда как более высокая настройка порога давления может иметь тенденцию способствовать преобладанию производительности над эффективностью использования топлива. Оператор может, таким образом, управлять балансом между эффективностью использования топлива и производительностью на основе, например, операционных целей.
Устройство ввода оператора может быть сконфигурировано для ручного ввода настройки порога давления из диапазона выбираемых значений большим многообразием способов. Устройство ввода оператора может иметь экранный монитор, выполненный с возможностью ручного выбора настройки порога давления. Экранный монитор может иметь одну или более кнопку для перехода по экранам меню и вариантам выбора и выбора желаемой настройки порога давления. В других примерах устройство ввода оператора может иметь автономное устройство вдобавок к экранному монитору для перехода через экраны меню и варианты выбора и выбора желаемой настройки. Автономное устройство может заменить одну или более кнопок. В еще одних, других примерах устройство ввода оператора для ручного выбора настройки порога давления может включать в себя автономное устройство, но не экранный монитор. Автономное устройство может принимать форму, например, одной или более кнопок, наборного диска, ползунка, тумблера, переключателя или тому подобного, и датчика положения, если необходимо, чтобы определять положение автономного устройства.
Согласно разновидности режима отклонения потока давления, рабочее транспортное средство содержит первую инструментальную секцию (например, экскаваторную секцию экскаваторной погрузочной машины), вторую инструментальную секцию (например, погрузочную секцию экскаваторной погрузочной машины), датчик секции, выполненный с возможностью определять, какая из первой инструментальной секции и второй инструментальной секции находится в фокусе (например, включена), гидравлическую систему и контроллер. Гидравлическая система содержит резервуар для текучей среды, группу насосов, содержащую первый насос с постоянным расходом и второй насос с постоянным расходом, так что первый и второй насосы имеют потоки, параллельные друг другу, распределительную клапанную систему с открытым центром (т.е. один или более распределительный клапан), электрогидравлический отклонитель, соединенный по текучей среде с точкой между вторым насосом и распределительной клапанной системой и с резервуаром для текучей среды, чтобы отклонять поток от второго насоса к резервуару для текучей среды, когда отклонитель открыт, и датчик давления, установленный, чтобы определять давление подачи в гидравлической системе. Контроллер выполнен с возможностью принимать сигнал давления подачи, показывающий давление подачи, и сигнал секции, показывающий, какая из первой инструментальной секции и второй инструментальной секции находится в фокусе, определять, какая из первой инструментальной секции и второй инструментальной секции находится в фокусе, выбирать первую настройку порога давления в качестве выбранной настройки порога давления, если первая инструментальная секция находится в фокусе, или вторую настройку порога давления в качестве выбранной настройки порога давления, если вторая инструментальная секция находится в фокусе, определять, является ли давление подачи, по меньшей мере, выбранной настройкой порога давления, и если так, давать команду отклонителю открыться.
Согласно третьему объекту изобретения создано рабочее транспортное средство, содержащее: резервуар для текучей среды; группу насосов, содержащую первый насос с постоянным расходом и второй насос с постоянным расходом, причем потоки первого и второго насосов параллельны друг другу; исполнительный механизм; распределительный клапан с открытым центром, расположенный по текучей среде между группой насосов и исполнительным механизмом; электрогидравлический отклонитель, соединенный по текучей среде с точкой между вторым насосом и распределительным клапаном и с резервуаром для текучей среды, для отклонения потока от второго насоса к резервуару для текучей среды, когда отклонитель открыт; датчик запуска, установленный для определения запуска рабочего транспортного средства; двигатель; датчик скорости двигателя, установленный для определения скорости вращения двигателя ("скорости двигателя"); и контроллер, выполненный с возможностью: принятия сигнала запуска, показывающего запуск рабочего транспортного средства, и сигнала скорости двигателя, показывающего скорость двигателя, определения, произошел ли запуск рабочего транспортного средства, и является ли скорость двигателя ниже порога скорости двигателя, и выдачи команды отклонителю на открытие, если запуск рабочего транспортного средства произошел, и скорость двигателя ниже порога скорости двигателя. Этот режим отклонения потока уменьшает паразитные нагрузки на двигатель в момент запуска, так что двигатель может запускаться более просто (особенно полезно при низких температурах). Это в материалах настоящей заявки указывается ссылкой как режим отклонения потока запуска.
Предпочтительно, датчик запуска представляет собой кнопочный переключатель, и контроллер электрически соединен с кнопочным переключателем.
Предпочтительно, датчик скорости двигателя представляет собой генератор переменного тока, функционально соединенный с двигателем, и контроллер электрически соединен с генератором переменного тока.
Предпочтительно, порог скорости двигателя представляет собой ненулевое значение ниже скорости холостого хода двигателя.
Согласно четвертому объекту изобретения создано рабочее транспортное средство, содержащее: первую инструментальную секцию; вторую инструментальную секцию; датчик секции, выполненный с возможностью определения, какая из первой инструментальной секции и второй инструментальной секции находится в фокусе; гидравлическую систему, содержащую резервуар для текучей среды, группу насосов, содержащую первый насос с постоянным расходом и второй насос с постоянным расходом, причем потоки первого и второго насосов параллельны друг другу, распределительную клапанную систему с открытым центром, электрогидравлический отклонитель, соединенный по текучей среде с точкой между вторым насосом и распределительной клапанной системой и с резервуаром для текучей среды, для отклонения потока от второго насоса к резервуару для текучей среды, когда отклонитель открыт, и датчик давления, установленный для измерения давления подачи в гидравлической системе; и контроллер, выполненный с возможностью: принятия сигнала давления подачи, показывающего давление подачи, и сигнала секции, показывающего какая из первой инструментальной секции и второй инструментальной секции находится в фокусе, определения, какая из первой инструментальной секции и второй инструментальной секции находится в фокусе, выбора первой настройки порога давления в качестве выбранной настройки порога давления, если первая инструментальная секция находится в фокусе, или второй настройки порога давления в качестве выбранной настройки порога давления, если вторая инструментальная секция находится в фокусе, определения, является ли давление подачи, по меньшей мере, выбранной настройкой порога давления, и, если так, выдачи команды отклонителю на открытие.
Предпочтительно, первая инструментальная секция является экскаваторной секцией, а вторая инструментальная секция является погрузочной секцией.
Датчик запуска может быть кнопочным переключателем. Контроллер может быть соединен электрически с кнопочным переключателем. По существу, когда кнопочный переключатель закрывается, контроллер оказывается в электрической связи с батареей, и в этот момент контроллер определяет, что произошел запуск транспортного средства. Кнопочный переключатель закрывается в ответ на поворот физического ключа, нажатие кнопки запуска или другое событие запуска.
Датчик скорости двигателя может быть генератором переменного тока, функционально соединенным с двигателем. Генератор переменного тока приводится в движение ремнем между генератором переменного тока и выходным валом двигателя. Контроллер соединен электрически с генератором переменного тока, чтобы принимать оттуда электрический сигнал. Сигнал представляет собой сигнал переменного тока (например, прямоугольная волна). Контроллер определяет скорость двигателя, используя этот сигнал и геометрию, относящуюся к передаточному отношению ременной передачи между приводным шкивом, с которым соединен выходной вал двигателя, и ведомым шкивом, с которым соединен генератор переменного тока, при этом ремень протянут вокруг этих шкивов. Сигнал генератора переменного тока, таким образом, может быть охарактеризован как сигнал скорости двигателя. Другие датчики скорости двигателя могут быть использованы вместо генератора переменного тока, такие как, например, датчик скорости коленчатого вала двигателя.
Рабочее транспортное средство может иметь любой один или более из режимов отклонения потока, раскрытых в материалах настоящей заявки. Оно может иметь только один из режимов отклонения потока, или любую комбинацию из двух или более режимов отклонения потока. В конкретном применении экскаваторной погрузочной машины экскаваторная погрузочная машина может иметь режим отклонения потока скорости, режим отклонения потока оператора и режим отклонения потока запуска. В другом применении экскаваторной погрузочной машины экскаваторная погрузочная машина может иметь режим отклонения потока давления один или в комбинации с любыми другими режимами отклонения потока (например, всеми тремя из других режимов).
При отсутствии активации режима отклонения потока потоки из первого и второго насосов объединяются и подаются в распределительный клапан(ы) гидравлической системы. При активации режим отклонения потока скорости способствует эффективности использования топлива рабочего транспортного средства, режим отклонения потока оператора и режим отклонения потока давления способствуют управляемости оператором, и режим отклонения потока запуска способствует простоте запуска двигателя, особенно полезной при относительно низких температурах.
В примере режима отклонения потока скорости рабочее транспортное средство имеет переключатель передаточного отношения и датчик передаточного отношения, определяющий передаточное отношение, выбранное с помощью переключателя передаточного отношения. Контроллер может принимать сигнал скорости, показывающий скорость относительно земли рабочего транспортного средства, в качестве параметра скорости, и сигнал передаточного отношения, показывающий выбранное передаточное отношение, определять, является ли скорость относительно земли, по меньшей мере, порогом скорости, и является ли выбранное передаточное отношение, по меньшей мере, порогом передаточного отношения, и выдавать команду отклонителю открыться, если скорость относительно земли представляет собой, по меньшей мере, порог скорости, а выбранное передаточное отношение - по меньшей мере, порог передаточного отношения. Контроллер может выдавать команду отклонителю закрыться, если скорость относительно земли представляет собой, по меньшей мере, порог скорости, но выбранное передаточное отношение ниже порога передаточного отношения, так что поток из двух насосов все еще будет доступен для работы по назначению и производительности.
Вышеупомянутые и другие отличительные признаки станут очевидными из последующего описания и прилагаемых чертежей.
Краткое описание чертежей
Подробное описание изобретения выполнено со ссылкой на прилагаемые чертежи, на которых:
ФИГ. 1 - схематический вид рабочего транспортного средства;
ФИГ. 2 - схематический вид экранного модуля для устройства ввода оператора;
ФИГ. 3 - схематический вид, иллюстрирующий электрогидравлический отклонитель для насоса группы насосов рабочего транспортного средства;
ФИГ. 4 - блок-схема программы управления;
ФИГ. 5 - блок-схема, показывающая альтернативный вариант осуществления для части программы управления; и
ФИГ. 6 - блок-схема, показывающая альтернативный вариант осуществления для части программы управления.
Подробное описание изобретения
На ФИГ. 1 показано рабочее транспортное средство 10, имеющее гидравлическую систему 12 и контроллер 13. Гидравлическая система 12 имеет резервуар 14 для текучей среды (например, резервуар для гидравлической жидкости), группу 16 насосов, имеющую первый насос 18 с постоянным расходом и второй насос 20 с постоянным расходом, так что первый и второй насосы 18, 20 имеют потоки, параллельные друг другу, исполнительный механизм 22, распределительный клапан 24 с открытым центром, расположенный в текучей среде между группой 16 насосов и исполнительным механизмом 22, и электрогидравлический отклонитель 26, соединенный по текучей среде с точкой между вторым насосом 20 и распределительным клапаном 24 и с резервуаром 14 для текучей среды, чтобы отклонять поток от второго насоса 20 к резервуару 14 для текучей среды, когда отклонитель 26 открыт.
Насосы 18, 20 могут управляться совместно. В проиллюстрированном примере насосы 18, 20 последовательно соединены с двигателем 28 рабочего транспортного средства 10. Они могут быть соединены с одним и тем же выходным валом двигателя 28 или с отдельными выходными валами двигателя 28. В других примерах насосы 18, 20 могут быть последовательно соединены с трансмиссией 30 рабочего транспортного средства 10, с одним и тем же выходным валом трансмиссии 30 или с отдельными выходными валами трансмиссии 30.
Насосы 18, 20 представляют собой насосы с постоянным расходом. По существу, объем текучей среды, перемещенной каждым из насосов 18, 20 за цикл, является неизменным. Насосы 18, 20 могут быть, например, шестеренчатыми насосами. Насосы 18, 20 имеют один и тот же постоянный расход. В других примерах насосы 18, 20 могут иметь различные постоянные расходы.
Распределительный клапан 24 относится к типу с открытым центром. По существу, в своем нейтральном положении (схематически показанном на ФИГ. 1), клапан 24 позволяет текучей среде проходить непрерывно через него. В качестве примера, в нейтральном положении клапана 24 текучая среда направляется от каждого исполнительного механизма 22 к резервуару 14. Когда клапан 24 переключается из своего нейтрального положения, клапан 24 подает гидравлическую текучую среду в исполнительный механизм 22 и направляет возвратную текучую среду в резервуар 14.
Исполнительный механизм 22 может быть любым типом исполнительного механизма, управляемого текучей средой, чтобы активировать соответствующую функцию 32 транспортного средства 10. Например, исполнительный механизм 22 может быть цилиндром, двигателем и т.д. Функция 32 может быть любым типом функции транспортного средства 10, такой как, например, стрелой, ковшом, рукоятью и т.д.
Гидравлическая текучая среда может быть отфильтрована и затем охлаждена, прежде чем она вернется в резервуар 14. По существу, гидравлическая система 12 может включать в себя гидравлический фильтр в нисходящем потоке распределительного клапана(ов) 24 и устройство охлаждения гидравлической жидкости в нисходящем потоке гидравлического фильтра.
Согласно режиму отклонения потока скорости транспортного средства 10, транспортное средство 10 имеет датчик 34 скорости для определения параметра скорости рабочего транспортного средства 10. Контроллер 13 может принимать сигнал скорости, показывающий параметр скорости, определять, удовлетворяет ли параметр скорости заданному критерию скорости, и выдавать команду отклонителю 26 открыться, если параметр скорости удовлетворяет заданному критерию скорости.
В примере заданного критерия скорости контроллер 13 может определять, является ли параметр скорости, по меньшей мере, порогом скорости, и если так, давать команду отклонителю 26 открыться. Например, параметр скорости может быть показателем скорости относительно земли рабочего транспортного средства. Порог скорости может быть значением, хранимым в памяти контроллера 13 (например, 12,9 км/ч). Он может сохраняться, например, во время производства, или он может быть выбираемым оператором, чтобы сохраняться при выборе оператора.
Отклонение потока второго насоса 20 на пороге скорости способствует эффективному использованию топлива во время движения транспортного средства 10 на скорости (иногда указываемой ссылкой как "перемещение" или "езда по дороге" транспортного средства 10), поскольку предполагается, что функция 32 не будет использоваться во время движения транспортного средства 10 (или может затрагивать только минимальное использование во время движения). Функция 32, таким образом, может не быть частью двигательной установки транспортного средства 10 (т.е. недвигательная функция), при этом двигательная установка включает в себя двигатель 28, ведущие элементы сцепления с землей транспортного средства 10 и элементы между ними. По существу, на транспортных скоростях поток второго насоса 20 отклоняется к резервуару 14 для текучей среды, уменьшая падение давления через распределительный клапан(ы) 24 гидравлической системы 12. Во время активации режима отклонения потока скорости (или любого режима отклонения потока, раскрытого в материалах настоящей заявки), первый насос 18 продолжает подавать гидравлическую жидкость, так что управление и незначительные корректирования других функций 32 все еще могут быть осуществлены.
Датчик 34 скорости может быть сконфигурирован большим многообразием способов. Например, датчик 34 скорости может определять скорость вращения элемента двигательной установки в качестве показателя скорости относительно земли (в условиях отсутствия пробуксовки). В проиллюстрированном примере датчик 34 скорости установлен, чтобы определять выходную скорость вращения трансмиссии 30 в качестве показателя скорости (например, выходную скорость вращения выходного вала трансмиссии 30). Такой параметр скорости может быть очень подходящим в случае, когда между двигателем 26 и трансмиссией 30 есть преобразователь крутящего момента. В случае двигательной установки с прямым приводом, в которой двигатель 28 и трансмиссия 30 механически соединены друг с другом без преобразователя крутящего момента между ними, датчик 34 скорости может определять выходную скорость вращения выходного вала двигателя 28 в качестве параметра скорости (т.е., датчик скорости двигателя, такой как датчик 72 скорости двигателя). В других примерах датчик скорости может быть установлен на главной передаче транспортного средства 10, чтобы определять скорость вращения этого компонента (например, входного вала) в качестве параметра скорости, или может быть установлен на элементе сцепления с землей транспортного средства 10 (например, на колесе), чтобы определять скорость вращения этого элемента в качестве параметра скорости.
В других примерах датчик 34 скорости может определять фактическую скорость относительно земли транспортного средства 10 в качестве показателя скорости относительно земли (в условиях отсутствия и присутствия пробуксовки). Например, датчик скорости может быть радиолокационным устройством, сконфигурированным, чтобы определять актуальную скорость относительно земли рабочего транспортного средства в качестве параметра скорости. В еще одном, другом примере датчик скорости может быть устройством GPS (устройством глобальной системы определения положения), сконфигурированным, чтобы определять актуальную скорость относительно земли рабочего транспортного средства в качестве параметра скорости. Как в каждом из вышеупомянутых примеров датчика скорости, параметр скорости может быть показателем скорости относительно земли рабочего транспортного средства.
Согласно режиму отклонения потока оператора транспортного средства 10, транспортное средство 10 имеет устройство 36 ввода оператора, выполненное с возможностью ручного выбора настройки отклонения, вне зависимости от любого положения сиденья рабочего транспортного средства транспортного средства 10. Контроллер 13 может принимать сигнал настройки отклонения, показывающий выбранную настройку отклонения, определять состояние выбранной настройки отклонения и давать команду отклонителю 26 открыться, если выбранная настройка отклонения находится в состоянии отклонения потока.
На ФИГ. 2 показано устройство 36 ввода оператора для ручного выбора настройки отклонения вне зависимости от любого положения сиденья рабочего транспортного средства 10. Оператор, таким образом, может отклонить поток второго насоса по своему усмотрению. Оператор может пожелать сделать так, чтобы, например, поспособствовать эффективности использования топлива во время режима холостого хода рабочего транспортного средства 10, если холостой ход продолжается в течение длительного периода времени, или в других обстоятельствах; чтобы осуществлять относительно точное управление инструментом рабочего транспортного средства 10, например, во время операций подъема краном (например, когда может быть использована экскаваторная секция экскаваторной погрузочной машины, чтобы переместить трубу или чтобы передвинуть крышку люка, переносимую ковшом экскаваторной секции) или точного позиционирования и операций копания; или во время перемещения на малых скоростях, чтобы помочь уменьшить потери мощности открытого центра и уменьшить потребление топлива. Режим отклонения потока оператора уменьшает гидравлическую мощность, потребляемую транспортным средством 10 во время работы, и паразитные потери, повышая эффективность использования топлива транспортного средства 10.
Устройство 36 ввода оператора может быть сконфигурировано разнообразными способами для ручного выбора настройки отклонения. В проиллюстрированном на ФИГ. 2 примере устройство 36 ввода оператора представляет собой экранный монитор, выполненный с возможностью ручного выбора настройки отклонения. Монитор имеет ряд кнопок, чтобы перейти и выбрать меню Экономичный Режим, и затем выбрать либо "ВКЛ", соответствующий состоянию отклонения потока (может также называться "ТРАНСПОРТ" или любым другим подходящим именем) или "ВЫКЛ", соответствующий состоянию неотклонения потока (может также называться "РАБОТА" или любым другим подходящим именем).
Монитор имеет, например, кнопку 60 МЕНЮ, кнопку 62 СЛЕДУЮЩИЙ, кнопку 64 ВЫБОР и экран 66. Из экрана главного меню на экране 66 оператор нажимает кнопку 60 МЕНЮ, и в этот момент ряд меню отображается на экране 66. Оператор нажимает кнопку 62 СЛЕДУЮЩИЙ последовательно по мере необходимости, чтобы привести меню Настройки в фокус (например, подсветить). Оператор нажимает кнопку 64 ВЫБОР, чтобы выбрать меню Настройки. Когда меню Настройки выбрано, меню Экономичный Режим отображается на экране 66. Опции "ВЫКЛ" и "ВКЛ" отображаются на экране 66 в меню Экономичный Режим. Состояние по умолчанию настройки отклонения представляет собой ВЫКЛ или состояние неотклонения потока. Оператор может нажать кнопку 62 СЛЕДУЮЩИЙ последовательно по мере необходимости, чтобы переключиться между ВКЛ и ВЫКЛ, чтобы привести желаемое состояние в фокус. Нажатие кнопки 64 ВЫБОР, когда ВКЛ или состояние отклонения потока находится в фокусе, выбирает состояние отклонения потока, в то время как нажатие кнопки 64 ВЫБОР, когда ВЫКЛ или состояние неотклонения потока находится в фокусе, выбирает состояние неотклонения потока. В обоих случаях контроллер 13 принимает сигнал настройки отклонения, показывающий выбранную настройку отклонения, когда кнопка 64 ВЫБОР нажата в меню Экономичный Режим.
Монитор также может иметь кнопку 65 НАЗАД. Тогда как кнопка 62 СЛЕДУЮЩИЙ может использоваться, чтобы двигаться через пункты меню в одном направлении, кнопка 65 НАЗАД может использоваться, чтобы двигаться через пункты меню в обратном направлении.
Контроллер 13 может определять состояние выбранной настройки отклонения. Когда оператор нажимает кнопку 64 ВЫБОР, в то время как ВКЛ или состояние отклонения потока находится в фокусе на экране 66, сигнал настройки отклонения принимается из экранного монитора контроллером 13, и контроллер 13 определяет, что состояние выбранной настройки отклонения представляет собой состояние отклонения потока, и дает команду отклонителю 26 открыться, активируя экономичный режим. Когда оператор нажимает кнопку 64 ВЫБОР, в то время как ВЫКЛ или состояние неотклонения потока находится в фокусе на экране 66, сигнал настройки отклонения принимается из экранного монитора контроллером 13, и контроллер 13 определяет, что состояние выбранной настройки отклонения представляет собой состояние неотклонения потока, и дает команду отклонителю 26 закрыться, деактивируя экономичный режим.
Сигнал настройки отклонения показывает выбранную настройку отклонения. Контроллер 13 изменяет значение внутренней переменной в зависимости от того, какая настройка отклонения находится в фокусе. Когда кнопка 64 ВЫБОР нажимается с конкретной настройкой отклонения в фокусе, настройка отклонения, связанная с этим значением внутренней переменной, становится выбранной настройкой отклонения. Сигнал, генерируемый при нажатии кнопки 64 ВЫБОР (т.е. сигнал настройки отклонения), фактически сообщает контроллеру 13, что настройка отклонения в фокусе должна быть выбранной настройкой отклонения (сам сигнал имеет один и тот же уровень напряжения вне зависимости от конкретной настройки отклонения, которая выбрана). Таким образом, сигнал настройки отклонения показывает выбранную настройку отклонения. Контроллер 13, таким образом, определяет состояние выбранной настройки отклонения.
В качестве примера, выбранная настройка отклонения представляет собой прямой запрос от оператора, в отличие от запроса, который может быть выведен из или быть следствием какого-либо другого действия, такого как, например, вращение сиденья 80 оператора из первого положения во второе положение. Рабочее транспортное средство 10 имеет сиденье 80 оператора на рабочем месте оператора рабочего транспортного средства 10, но выбор настройки отклонения не зависит от положения этого сиденья 80 или любого другого сиденья рабочего транспортного средства 10.
Что касается выбора настройки отклонения, в других примерах устройство 36 ввода оператора может иметь автономное устройство вдобавок к экранному монитору для перехода через экраны меню и варианты выбора и выбора желаемой настройки. Автономное устройство может заменить одну или более из кнопок 60, 62, 64. В еще одних, других примерах устройство 36 ввода оператора для ручного выбора настройки отклонения может включать в себя автономное устройство, но не экранный монитор. Автономное устройство может принимать форму, например, одной или более кнопок, наборного диска, ползунка, тумблера, переключателя или тому подобного, и датчика положения, если необходимо, чтобы определять положение автономного устройства. По существу, датчик положения может предоставлять различные уровни напряжения контроллеру 13, каждый из которых показывает настройку отклонения в зависимости от положения автономного устройства.
Как показано на ФИГ. 1, согласно режиму отклонения потока запуска транспортного средства 10, транспортное средство 10 имеет датчик 70 запуска для определения запуска рабочего транспортного средства 10, и датчик 72 скорости двигателя, установленный, чтобы определять информацию, показывающую скорость вращения двигателя 28 ("скорость двигателя"). Контроллер 13 может принимать сигнал запуска, показывающий запуск рабочего транспортного средства 10, и сигнал скорости двигателя, показывающий скорость двигателя, определять, произошел ли запуск рабочего транспортного средства 10 и ниже ли скорость двигателя порога скорости двигателя, и выдавать команду отклонителю 26 открыться, если запуск рабочего транспортного средства 10 произошел, и скорость двигателя ниже порога скорости двигателя. Этот режим отклонения потока уменьшает паразитные нагрузки на двигатель 28, позволяя более просто запустить двигатель 28.
Датчик 70 запуска может быть кнопочным переключателем. В этом случае контроллер 13 соединен электрически с кнопочным переключателем. Когда кнопочный переключатель закрывается, контроллер 13 оказывается в электрической связи с батареей транспортного средства 10, и в этот момент контроллер 13 пробуждается и определяет, что произошел запуск транспортного средства 10. Кнопочный переключатель закрывается в ответ на поворот физического ключа. В других примерах кнопочный переключатель может закрываться в ответ на нажатие кнопки запуска или другое событие запуска.
Датчик 72 скорости двигателя может быть генератором переменного тока, функционально соединенным с двигателем 28. Генератор переменного тока приводится в движение ремнем между генератором переменного тока и выходным валом двигателя 28. Контроллер 13 соединен электрически с генератором переменного тока, чтобы принимать оттуда электрический сигнал. Генератор переменного тока имеет разъем, который генерирует сигнал (например, разъем может быть выводом одной из обмоток статора), который является сигналом переменного тока (например, прямоугольной волной). Контроллер 13 определяет скорость двигателя, используя этот сигнал и геометрию, относящуюся к передаточному отношению ременной передачи между приводным шкивом, с которым соединен выходной вал двигателя, и ведомым шкивом, с которым соединен генератор переменного тока, при этом ремень протянут вокруг этих шкивов. Сигнал генератора переменного тока, таким образом, может быть охарактеризован как сигнал скорости двигателя. Другие датчики скорости двигателя могут быть использованы вместо генератора переменного тока, такие как, например, датчик скорости коленчатого вала двигателя.
Порог скорости двигателя представляет собой ненулевое значение ниже скорости холостого хода двигателя, но достаточно высокое, чтобы контроллер 13 подтвердил, что двигатель 28 работает. В применении экскаваторной погрузочной машины порог скорости двигателя может быть, например, 600 оборотов в минуту ("об/мин"), и скорость холостого хода двигателя может быть, например, 875 об/мин (± 25 об/мин).
В проиллюстрированном примере контроллер 13 представляет собой электронный контроллер. По существу, контроллер 13 соединен электрически с датчиком 34 скорости, устройством 36 ввода оператора, датчиком 70 запуска и датчиком 72 скорости двигателя и отклонителем 24. Контроллер 13 имеет процессор и память, в которой хранятся команды, которые, когда выполняются процессором, побуждают процессор выполнять его различные операции. В проиллюстрированном примере контроллер 13 представляет собой единственный электронный контроллер, участвующий в отклонении потока от второго насоса 20 (он также может быть единственным электронным контроллером транспортного средства 10).
В других примерах контроллер 13 может быть одним из сети электронных контроллеров, соединенных друг с другом с помощью, например, шины CAN (шины локальной сети контроллеров). В этом случае параметр скорости, выбранная настройка отклонения, информация о запуске транспортного средства и скорость двигателя могут быть введены в контроллер прямо или непрямо через один или более других контроллеров, которые транслируют в шину CAN соответствующее сообщение(я), показывающее параметр скорости и/или выбранную настройку отклонения, и принимаемое контроллером 13, управляющим отклонителем 26. Вне зависимости от того, получает контроллер 13 эти входные сигналы прямо или непрямо, контроллер 13 соединен электрически с датчиком 34 скорости, устройством 36 ввода оператора, датчиком 70 запуска и датчиком 72 скорости двигателя и отклонителем 24.
Как показано на ФИГ. 3, отклонитель 26 соединен по текучей среде с точкой 39 между вторым насосом 20 и распределительным клапаном 24 и с резервуаром 14 для текучей среды, чтобы отклонять поток от второго насоса 20 к резервуару 14 для текучей среды, когда отклонитель 26 открыт. Насосы 18, 20 имеют потоки, параллельные друг другу, при этом первый насос 18 - в первой линии параллельного расположения, а второй насос 20 - во второй линии параллельного расположения. Точка 39 находится во второй линии параллельного расположения в нисходящем потоке от второго насоса 20, и в качестве примера в восходящем потоке от обратного клапана 40.
Отклонитель 26 имеет управляемый разгрузочный клапан 42 и электрогидравлический управляющий клапан 44. Разгрузочный клапан 42 поджат пружиной в закрытое положение, препятствуя передаче текучей среды между точкой 39 и резервуаром 14 через отклонитель 26. Например, разгрузочный клапан 42 представляет собой пропорциональный клапан, хотя он мог бы быть двухпозиционным клапаном. Разгрузочный клапан 42 имеет первый управляющий порт 46 и второй управляющий порт 48. Управляющие порты 46, 48 соединены по текучей среде со второй линией параллельного расположения в нисходящем потоке от обратного клапана 40, первый управляющий порт 46 так соединен через отверстие 50. Управляющий клапан 44 соединен по текучей среде с первым управляющим портом 46 и со вторым управляющим портом 48 через отверстие 50 и поджат пружиной в закрытое состояние, препятствуя передаче текучей среды между управляющими портами 46, 48 и резервуаром 14.
Контроллер 13 соединен электрически с управляющим клапаном 44. Контроллер дает команду отклонителю 26 открыться путем вывода управляющего сигнала в управляющий клапан 44, возбуждая его соленоид. Такое возбуждение переключает управляющий клапан 44 (например, его золотник, когда клапан 44 представляет собой золотниковый клапан) из его обычно закрытого положения в открытое положение, давая выход первому управляющему порту 46 в резервуар 14, чтобы создать дисбаланс давления между управляющими портами 46, 48 из-за отверстия 50. В результате разгрузочный клапан 42 переключается из его обычно закрытого положения в открытое положение, отклоняя поток от второго насоса 20 через разгрузочный клапан 42 в резервуар 14.
Отклонитель 26 имеет предохранительный клапан 52. Предохранительный клапан 52 поджат пружиной в закрытое положение и выполнен с возможностью открываться, если давление подачи во второй линии параллельного расположения представляет собой, по меньшей мере, заданный порог снятия давления. Заданный порог снятия давления может быть достигнут во время операций, касающихся относительно высокого давления, где поток от второго насоса 20 может быть не нужен (например, копание траншеи экскаваторной секцией экскаваторной погрузочной машины или копание в куче погрузочной секцией экскаваторной погрузочной машины). Предохранительный клапан 52 дает выход первому управляющему порту 46 в резервуар 14, чтобы создать дисбаланс давления между управляющими портами 46, 48 из-за отверстия 50, чтобы заставить разгрузочный клапан 42 переключиться из его обычно закрытого положения в его открытое положение, отклоняя поток от второго насоса 20 через разгрузочный клапан 42 в резервуар 14.
Как показано на ФИГ. 4, контроллер 13 имеет программу 54 управления, чтобы управлять отклонителем 26. Что касается режима отклонения потока скорости, в действии 110 контроллер 13 принимает сигнал скорости. Программа 54 управления переходит к действию 112. В действии 112 контроллер 13 определяет, является ли параметр скорости, по меньшей мере, порогом скорости (например, 12,9 км/ч). Если да, то программа 54 управления переходит к действию 116. В действии 116 контроллер 13 дает команду отклонителю 26 открыться путем выведения сигнала управления в управляющий клапан 44, чтобы возбудить его соленоид. Если нет, то программа 54 управления переходит к действию 118. В действии 118 контроллер 13 дает команду отклонителю 26 закрыться путем невыведения сигнала управления в управляющий клапан 44, позволяя управляющему клапану 44 и разгрузочному клапану 42 принимать их нормальные, поджатые пружиной закрытые состояния. Как только отклонителю 26 была дана команда открыться, в программу 54 управления включается Задержка, чтобы избежать быстрого включения и выключения отклонителя 26 из-за небольших колебаний в параметре скорости, так что как только отклонителю была дана команда открыться, порог скорости уменьшается с начального порога скорости (например, 12 км/ч для применения экскаваторной погрузочной машины) до второго порога скорости (например, 11,2 км/ч для применения экскаваторной погрузочной машины).
Что касается режима отклонения потока оператора, в действии 114 контроллер 13 принимает сигнал настройки отклонения. Программа 54 управления переходит к действию 115. В действии 115 контроллер 13 определяет состояние выбранной настройки отклонения. Контроллер 13 хранит состояние выбранной настройки отклонения в своей памяти (т.е. состояние отклонения потока или состояние неотклонения потока) в ответ на сигнал настройки отклонения вследствие выбора настройки отклонения оператором через устройство 36 ввода оператора. Если контроллер 13 определяет, что состояние выбранной настройки отклонения представляет собой состояние отклонения потока, программа 54 управления переходит к действию 116, где контроллер 13 дает команду отклонителю 26 открыться путем выведения сигнала управления в управляющий клапан 44, чтобы возбудить его соленоид. Если контроллер 13 определяет, что состояние выбранной настройки отклонения представляет собой состояние неотклонения потока, программа 54 управления переходит к действию 118, где контроллер 13 дает команду отклонителю 26 закрыться путем невыведения сигнала управления в управляющий клапан 44, позволяя управляющему клапану 44 и разгрузочному клапану 42 принять свои нормальные, поджатые пружиной закрытые состояния.
Что касается режима отклонения потока запуска, в действии 126 контроллер 13 принимает сигнал запуска и сигнал скорости двигателя. Программа 54 управления переходит к действию 128. В действии 128 контроллер 13 определяет, произошел ли запуск рабочего транспортного средства 10, и ниже ли скорость двигателя порога скорости двигателя. Если оба эти условия выполняются, программа 54 управления переходит к действию 116, где контроллер 13 дает команду отклонителю 26 открыться путем выведения сигнала управления в управляющий клапан 44, чтобы возбудить его соленоид. Если оба условия не выполняются, программа 54 управления переходит к действию 118, где контроллер 13 дает команду отклонителю 26 закрыться путем невыведения сигнала управления в управляющий клапан 44, позволяя управляющему клапану 44 и разгрузочному клапану 42 принять их нормальные, поджатые пружиной закрытые состояния.
Как показано на ФИГ. 1, в другом примере рабочего транспортного средства 10 рабочее транспортное средство 10 имеет датчик 68 давления, установленный, чтобы определять давление подачи в гидравлической системе 12, как, например, на впускном канале подачи распределительного клапана 24. Устройство 36 ввода оператора сконфигурировано для ручного выбора настройки порога давления. Контроллер 13 может принимать сигнал давления подачи, показывающий давление подачи, и сигнал порога давления, показывающий выбранную настройку порога давления, определять, является ли давление подачи, по меньшей мере, выбранным порогом давления, и, если так, выдавать команду отклонителю 26 открыться. В случае, когда транспортное средство 10 имело бы датчик 68 давления, отклонитель 26 был бы сконфигурирован без клапана 52 сброса давления, чтобы избежать затрат на клапан 52 сброса давления. Это режим отклонения потока давления.
Оператор может выбирать настройку порога давления по необходимости. Настройка более низкого порога давления может иметь тенденцию способствовать преобладанию эффективности использования топлива над производительностью, в то время как настройка более высокого порога давления может иметь тенденцию способствовать преобладанию производительности над эффективностью использования топлива. Оператор, таким образом, может управлять балансом между эффективностью использования топлива и производительностью на основе, например, операционных целей или рыночных соображений (например, Северная Америка может иметь тенденцию придавать особое значение производительности, в то время как другие регионы, такие как, например, Индия, могут иметь тенденцию придавать особое значение эффективности использования топлива).
Как показано на ФИГ. 2, устройство 36 ввода оператора (или другое устройство ввода оператора) может быть сконфигурировано большим многообразием способов для ручного выбора настройки порога давления из диапазона выбираемых значений. Устройство 36 ввода оператора может содержать экранный монитор, который может быть сконфигурирован для ручного выбора настройки порога давления. В таком случае кнопки 60, 62, 62 могут быть использованы для выбора желаемой настройки порога давления. Из экрана главного меню на экране 66 оператор нажимает кнопку 60 МЕНЮ, и в этот момент ряд меню отображается на экране 66. Оператор нажимает кнопку 62 СЛЕДУЮЩИЙ последовательно по мере необходимости, чтобы привести меню Давление в фокус. Оператор нажимает кнопку 64 ВЫБОР, чтобы выбрать меню Давление. Когда меню Давление выбрано, меню Давление отображается на экране 66. Список возможных настроек для порога давления отображается на экране 66. Оператор может нажать кнопку 62 СЛЕДУЮЩИЙ последовательно по мере необходимости, чтобы прокрутить список возможных настроек, чтобы привести желаемую настройку в фокус (с переходом из конца списка в начало списка). Альтернативно, вместо перечисления всех возможных настроек, только настройка в фокусе может быть отображена в данный момент времени, при этом последовательные нажатия кнопки 62 СЛЕДУЮЩИЙ вызывают отображение последовательных возможных настроек по одной на экране 66, и при этом они находятся в фокусе, потенциально допуская больше вариантов настройки порога давления, чем в случае с отображаемым списком (кнопка 62 СЛЕДУЮЩИЙ может увеличивать настройку на экране и в фокусе на заданное значение, и кнопка 65 НАЗАД может уменьшать эту настройку на заданное значение). Независимо от способа отображения, нажатие кнопки 64 ВЫБОР, когда желаемая настройка находится в фокусе, выбирает эту настройку в качестве выбранной настройки порога давления. Контроллер 13 принимает сигнал настройки порога давления, показывающий выбранную настройку порога давления.
Как упоминалось выше, монитор также может иметь кнопку 65 НАЗАД. Тогда как может использоваться кнопка 62 СЛЕДУЮЩИЙ, чтобы двигаться через пункты меню в одном направлении, кнопка 65 НАЗАД может использоваться, чтобы двигаться через пункты меню в обратном направлении.
Контроллер 13 может определять состояние выбранной настройки порога давления. Когда оператор нажимает кнопку 64 ВЫБОР, в то время как конкретная настройка находится в фокусе на экране 66, сигнал порога давления принимается контроллером 13, и контроллер 13 определяет, что состояние выбранной настройки порога давления представляет собой настройку в фокусе.
Сигнал порога давления показывает выбранную настройку порога давления. Контроллер 13 изменяет значение внутренней переменной в зависимости от того, какая настройка порога давления находится в фокусе. Когда кнопка 64 ВЫБОР нажимается с конкретной настройкой порога давления в фокусе, настройка порога давления, связанная с этим значением внутренней переменной, становится выбранной настройкой порога давления. Сигнал, генерируемый при нажатии кнопки 64 ВЫБОР (т.е. сигнал настройки порога давления), фактически сообщает контроллеру 13, что настройка порога давления в фокусе должна быть выбранной настройкой порога давления (сам сигнал имеет один и тот же уровень напряжения вне зависимости от конкретной настройки порога давления, которая выбрана). Таким образом, сигнал порога давления показывает выбранную настройку порога давления. Контроллер 13, таким образом, определяет состояние выбранной настройки порога давления.
Программа 54 управления контроллера 13, таким образом, может быть сконфигурирована, чтобы активировать или деактивировать отклонитель 26 в зависимости от давления подачи и выбранной настройки порога давления. В этом случае в действии 120 контроллер 13 принимает сигнал порога давления, показывающий выбранную настройку порога давления, в ответ на выбор настройки порога давления оператором. В действии 122 контроллер 13 принимает сигнал давления подачи, показывающий давление подачи, считанное датчиком 68 давления. Программа 54 управления переходит к действию 124, где контроллер 13 определяет, является ли давление подачи, по меньшей мере, выбранной настройкой порога давления, и, если так, дает команду отклонителю 26 открыться путем выведения сигнала управления в управляющий клапан 44, возбуждая его соленоид. Если давление подачи ниже выбранной настройки порога давления, как определено контроллером 13, контроллер 13 дает команду отклонителю 26 закрыться путем невыведения сигнала управления в управляющий клапан 44.
В других примерах устройство 36 ввода оператора может иметь автономное устройство вдобавок к экранному монитору для перехода по экранам меню и вариантам выбора и выбора желаемой настройки. Автономное устройство может заменить одну или более из кнопок 60, 62, 64. В еще одних, других примерах устройство 36 ввода оператора для ручного выбора настройки порога давления может включать в себя автономное устройство, но не экранный монитор. Такое автономное устройство может принимать форму, например, одной или более кнопок, наборного диска, ползунка, тумблера, переключателя или тому подобного, и датчика положения, если необходимо, чтобы определять положение автономного устройства. По существу, датчик положения может предоставлять различные уровни напряжения контроллеру 13, каждый из которых показывает настройку порога давления в зависимости от положения автономного устройства.
При отсутствии активации режима отклонения потока потоки из насосов 18, 20 объединяются и подаются в распределительный клапан(ы) 24. Что касается режима отклонения потока давления, во время таких операций, как копание траншеи экскаваторной секцией экскаваторной погрузочной машины, оператор нуждается в высоком давлении, но не требует полного потока во время выполнения разреза и наполнения ковша. Во время этой операции поток от второго насоса 20 отклоняется отклонителем 26 к резервуару 14 для текучей среды, тем самым используется поток только от насоса 18 в операции копания с высоким давлением. Оператор не должен заметить уменьшения в скорости функционирования во время копания при высоком давлении. Как только давление упадет ниже выбранной настройки порога давления, потоку от второго насоса 20 будет разрешено повторно объединиться с потоком от первого насоса 18, чтобы сохранить скорость функционирования на желаемом уровне.
Рабочее транспортное средство 10 может иметь любой один или более из четырех режимов отклонения потока, раскрытых в материалах настоящей заявки. Оно может иметь только один из режимов отклонения потока, или любую комбинацию из двух или более режимов отклонения потока.
Рабочее транспортное средство 10 может быть любым типом рабочего транспортного средства. Например, оно может быть строительным транспортным средством, сельскохозяйственным транспортным средством или лесохозяйственным транспортным средством. В качестве примера, рабочее транспортное средство 10 представляет собой экскаваторную погрузочную машину. В этом случае рабочее транспортное средство 10 включает трактор, экскаваторную секцию 37, соединенную с задней частью трактора, и погрузочную секцию 38, соединенную с передней частью трактора.
Экскаваторная секция 37 имеет ряд функций 32, таких как, например, поворотная рама, соединенная шарнирно и в некоторых примерах скользящим образом с трактором, стрела, соединенная шарнирно с поворотной рамой, рукоять, соединенная шарнирно со стрелой, и ковш, соединенный шарнирно с рукоятью. Экскаваторная секция 37 имеет ряд исполнительных механизмов 22, чтобы управлять этими экскаваторными функциями 32, таких как, например, два вращающихся цилиндра, цилиндр стрелы, цилиндр рукояти и цилиндр ковша. В некоторых примерах экскаваторная секция 37 также имеет четыре цилиндра блокировки сдвига в сторону для блокировки поворотной рамы и соединенных с ней элементов (например, стрелы, рукояти и ковша) в боковом положении по отношению к трактору.
Погрузочная секция 38 имеет ряд функций 32, таких как, например, стрела, соединенная шарнирно с трактором, и ковш, соединенный шарнирно со стрелой. Погрузочная секция 38 имеет ряд исполнительных механизмов 22, чтобы управлять этими погрузочными функциями 32, таких как, например, два цилиндра стрелы и цилиндр ковша. Должно быть понятно из вышеупомянутого, что хотя экскаваторная секция 37 и погрузочная секция 38 показаны в блоке 32 ФИГ. 1, каждая секция 37, 38 включает в себя не только функции 32 транспортного средства 10, но также исполнительные механизмы 22 транспортного средства 22 и различные соединительные элементы.
Дополнительные функции 32 экскаваторной погрузочной машины могут включать в себя рулевое управление и две рукояти стабилизатора, соединенные шарнирно с противоположными сторонами транспортного средства. Исполнительные механизмы 22, которые должны управлять этими функциями, включают в себя двигатель рулевого управления и два цилиндра стабилизатора.
Экскаваторная погрузочная машина может иметь один или более распределительных клапанов 24 с открытым центом (DCV -распределительный клапан). В качестве примера, она имеет DCV с открытым центром для экскаваторной секции и DCV с открытым центром для погрузочной секции, при этом каждый такой DCV представляет собой группу клапанов со множеством секций в общем корпусе.
Экскаваторный DCV имеет множество золотников соответственно для каждой экскаваторной функции 32 (т.е., качание, стрела, ковш, рукоять), также как и золотник с открытым центром в секции приоритетного клапана экскаваторного DCV, который дает приоритет потока клапану рулевого управления в ответ на чувствительное к нагрузке давление вследствие ручного управления клапаном рулевого управления.
Приоритет рулевого управления также мог бы быть осуществлен путем направления потока насоса от первого насоса 18 к клапану рулевого управления через автономный приоритетный клапан или приоритетный клапан, встроенный в блок рулевого управления. В любом случае, приоритетный клапан был бы расположен перед любым из DCV 24 в канале с открытым центром гидравлической системы 12.
Экскаваторный DCV может также иметь канал, подающий гидравлическую жидкость через поджатый пружиной обратный клапан к четырем цилиндрам блокировки сдвига в сторону, которые блокируют поворотную раму и соединенные с ней элементы в боковом положении по отношению к трактору, когда двухпозиционный электрогидравлический клапан под управлением контроллера 13 находится в своем обычно закрытом состоянии. Контроллер 13 может возбудить этот двухпозиционный клапан, чтобы переключить его в его открытое состояние, давая выход четырем блокирующим сдвиг в сторону цилиндрам в резервуар 14, с тем чтобы освободить их, позволяя ручной сдвиг в сторону поворотной рамы и соединенных с ней элементов или гравитационный сдвиг в сторону поворотной рамы и соединенных с ней элементов при частичном поднятии одной из рукоятей стабилизатора, после которого двухпозиционный клапан может быть выключен, заново блокируя четыре блокирующих сдвиг в сторону цилиндра, и таким образом поворотную раму и соединенные с ней элементы в новом боковом положении.
Погрузочный DCV имеет множество золотников соответственно для различных погрузочных функций 32 (т.е., стрела и ковш). Вдобавок, он имеет два золотника с отрытым центром, каждый соответственно для одной из двух рукоятей стабилизатора.
Отклонитель 26 может быть встроен во второй насос 20, экскаваторный DCV, погрузочный DCV или как автономный клапан.
В первом примере экскаваторной погрузочной машины экскаваторная погрузочная машина может иметь режим отклонения потока скорости, режим отклонения потока оператора и режим отклонения потока запуска, но, по причинам стоимости, может не иметь режима отклонения потока давления. Включение в состав режима отклонения потока скорости (например, с порогом скорости в 12,9 км/ч) считается особенно полезным в регионах, где распространено перемещение экскаваторной погрузочной машины (например, в Индии), хотя это было бы применимо в любом регионе. В такой экскаваторной погрузочной машине контроллер 13 может быть единственным электронным контроллером транспортного средства, и в этом случает параметр скорости, выбранная настройка отклонения, уведомление о запуске и скорость двигателя могут быть введены прямо в контроллер 13, и отклонитель 26 может быть под управлением контроллера 13.
Во втором примере экскаваторной погрузочной машины экскаваторная погрузочная машина может иметь все четыре режима отклонения потока (возможно, без функции сдвига в сторону, хотя функция сдвига в сторону также могла бы быть включена в состав). В такой экскаваторной погрузочной машине экскаваторная погрузочная машина может иметь любое количество контроллеров, связанных с этими режимами, например, три контроллера: первый контроллер, второй контроллер и третий контроллер (т.е., контроллер 13). Первый контроллер может быть соединен электрически с датчиком 34 скорости, который вводит параметр скорости в первый контроллер посредством сигнала скорости, показывающего параметр скорости, и первый контроллер может транслировать в шину CAN сообщение скорости (сам сигнал скорости, показывающий параметр скорости), принимаемое третьим контроллером. Первый контроллер может быть соединен электрически с датчиком 70 запуска, который вводит уведомление о запуске в первый контроллер посредством сигнала запуска в первый контроллер, и первый контроллер может транслировать в шину CAN сообщение запуска (сам сигнал запуска, показывающий запуск рабочего транспортного средства), принимаемое третьим контроллером. Первый контроллер может быть соединен электрически с датчиком 72 скорости двигателя, который вводит скорость двигателя в первый контроллер посредством сигнала скорости двигателя, показывающего скорость двигателя, и первый контроллер может транслировать в шину CAN сообщение скорости двигателя (сам сигнал скорости двигателя, показывающий скорость двигателя), принимаемое третьим контроллером (альтернативно может быть четвертый контроллер - блок управления двигателем - в который вводится скорость двигателя датчиком скорости двигателя, и который транслирует сообщение скорости двигателя в шину CAN).
Второй контроллер может быть электрически соединен с устройством 36 ввода оператора, который может вводить выбранную настройку отклонения во второй контроллер посредством сигнала настройки отклонения, показывающего выбранную настройку отклонения, и выбранную настройку порога давления во второй контроллер посредством сигнала порога давления, показывающего выбранную настройку порога давления. Второй контроллер может транслировать в шину CAN сообщение настройки отклонения (сам сигнал настройки отклонения, показывающий выбранную настройку отклонения) и сообщение настройки порога давления (сам сигнал порога давления, показывающий выбранную настройку порога давления), при этом оба сообщения принимаются третьим контроллером.
Третий контроллер может быть соединен электрически с датчиком 68 давления и отклонителем 26. Датчик 68 давления может вводить давление подачи в третий контроллер посредством сигнала подачи давления, показывающего давление подачи. Получив эту описанную таким образом информацию, третий контроллер управляет отклонителем 26 соответственно.
Контроллер 13 может быть соединен электрически с датчиком 34 скорости, датчиком 70 запуска, датчиком 72 скорости двигателя, устройством 36 ввода оператора, датчиком 68 давления и отклонителем 26 прямо или непрямо. Более того, транспортное средство 10 может иметь любое количество контроллеров - будь то один или более - связанных с отклонением потока, вне зависимости от того, какие режимы отклонения потока используются в транспортном средстве 10.
Когда какое-либо из отклонений потока активировано, весь поток от второго насоса 20 направляется в резервуар 14. В других примерах отклонитель 26 может отклонять только часть потока второго насоса 20 в резервуар, чтобы достичь большей точности в использовании заданного режима отклонения потока.
Отклонение потока давления может быть изменено. Например, при отсутствии выбора настройки порога давления оператором контроллер 13 может выбрать настройку порога давления по умолчанию в качестве выбранной настройки порога давления, при этом настройка порога давления по умолчанию представляет собой значение, заранее заданное в программном обеспечении (например, в процессе производства). В других примерах транспортное средство 10 может быть сконфигурировано без возможности выбора оператором настройки порога давления, и в этом случае настройка порога давления была бы заранее задана в программном обеспечении (например, в процессе производства). Вообще, что касается предоставления отклонения потока в ответ на давление, датчик 68 давления может быть использован вместо клапана 52 сброса давления (например, во втором примере экскаваторной погрузочной машины).
Следует понимать, что "сигнал" в материалах настоящей заявки может быть единственным сигналом или группой сигналов в зависимости от типа используемого датчика.
Как упоминалось выше, датчик 34 скорости может быть сконфигурирован большим многообразием способов. Как показано на ФИГ. 1, в другом примере датчик 34 скорости сконфигурирован как датчик 76 передаточного отношения, определяющий передаточное отношение, выбранное с помощью переключателя 74 передаточного отношения транспортного средства 10 (в качестве параметра скорости). Переключатель 74 передаточного отношения сконфигурирован для выбора передаточного отношения. Контроллер 13 может принимать сигнал передаточного отношения (в качестве сигнала скорости), показывающий выбранное передаточное отношение, определять, является ли выбранное передаточное отношение, по меньшей мере, порогом передаточного отношения (как заданный критерий скорости) и выдавать команду отклонителю 26 открыться, если выбранное передаточное отношение представляет собой, по меньшей мере, заданное передаточное отношение (например, третья или четвертая передача в прямом направлении из числа четырех передач в прямом направлении в применении экскаваторной погрузочной машины). В этом примере выбранное передаточное отношение предоставляет индикацию скорости, поскольку во время перемещения транспортного средства 10 выбранное передаточное отношение, вероятно, будет одним из более высоких передаточных отношений.
В другом примере режима отклонения потока скорости транспортное средство 10 может иметь переключатель 74 передаточного отношения, датчик 76 передаточного отношения и датчик 34 скорости в форме датчика скорости относительно земли, сконфигурированного, чтобы определять скорость относительно земли транспортного средства 10 (в качестве параметра скорости). Согласно этому примеру, контроллер 13 может принимать сигнал скорости, показывающий скорость относительно земли, и сигнал передаточного отношения, показывающий выбранное передаточное отношение, определять, является ли скорость относительно земли, по меньшей мере, порогом скорости (например, 12,9 км/ч в применении экскаваторной погрузочной машины), и является ли выбранное передаточное отношение, по меньшей мере, порогом передаточного отношения (например, третья или четвертая передача в прямом направлении из числа четырех передач прямого направления в применении экскаваторной погрузочной машины), и давать команду отклонителю 26 открыться, если скорость относительно земли представляет собой, по меньшей мере, порог скорости, и выбранное передаточное отношение представляет собой, по меньшей мере, порог передаточного отношения. Контроллер 13 может давать команду отклонителю 26 закрыться, если любое из условий не выполняется, как, например, если скорость относительно земли представляет собой, по меньшей мере, порог скорости, но выбранное передаточное отношение ниже порога передаточного отношения. Таким образом, поток от обоих насосов все еще будет доступен для работы по назначению и производительности.
Как показано на ФИГ. 5, согласно этому примеру, действия 110 и 112 программы 54 управления могут быть изменены соответственно действиями 110' и 112'. В действии 110' контроллер 13 принимает сигнал скорости, показывающий скорость относительно земли, и сигнал передаточного отношения, показывающий выбранное передаточное отношение. Программа 54 управления переходит к действию 112', в котором контроллер 13 определяет, является ли скорость относительно земли, по меньшей мере, порогом скорости, и является ли выбранное передаточное отношение, по меньшей мере, порогом передаточного отношения. Если да, программа управления переходит к действию 116, в котором контроллер 13 дает команду отклонителю 26 открыться. Если нет, программа 54 управления переходит к действию 118, в котором контроллер 13 дает команду отклонителю 26 закрыться.
Такая система может быть полезной, если поток от обоих насосов 18, 20 желателен для одной или более функций 32 во время того, как транспортное средство 10 перемещается. Может допускаться, что поток от обоих насосов 18, 20 желателен, когда, например, передаточное отношение ниже порога передаточного отношения. Например, со стрелой погрузчика может быть соединен толкатель снега. Во время операции толкания снега одно из более низких передаточных отношений может быть выбрано (например, первая или вторая передача в прямом направлении) для крутящего момента, но транспортное средство 10 может быть на транспортной скорости. В такой ситуации оператор может захотеть быстро поднять толкатель снега как часть операции толкания снега. Поток от обоих насосов 18, 20 будет доступен, чтобы так поднять толкатель снега. Если был бы доступен поток только от первого насоса 18, транспортное средство 10 не смогло бы поднять толкатель снега так быстро, как хотелось бы.
Как упоминалось выше, датчик 34 скорости может определять скорость относительно земли рабочего транспортного средства 10 большим многообразием способов, и, по существу, может указываться ссылкой как датчик скорости относительно земли. Датчик скорости относительно земли может быть сконфигурирован в качестве датчика скорости трансмиссии, датчика скорости двигателя, датчика скорости колеса или другого датчика скорости элемента сцепления с землей, датчика скорости главной передачи, радиолокационного или основанного на GPS датчика скорости и т.п.
Переключатель 72 передаточного отношения может быть сконфигурирован большим многообразием способов. Например, переключатель передаточного отношения сконфигурирован как рычаг FNR на рабочем месте оператора. Рычаг может шарнирно поворачиваться вокруг оси из нейтрального или "N" положения в прямом направлении в положение "F" вперед или в обратном направлении в обратное или "R" положение, чтобы выбрать направление транспортного средства. Рычаг может поворачиваться вокруг оси, определенной рычагом, между рядом отдельных угловых положений, соответствующих соответственно передаточным отношениям, не имеющим направления.
Датчик 76 передаточного отношения может включать в себя первый датчик, определяющий положение FNR рычага (т.е., в прямом, нейтральном или обратном положении), и второй датчик положения, определяющий угловое положение рычага. Первый датчик положения генерирует сигнал первого положения (например, сигнал напряжения), а второй датчик положения генерирует сигнал второго положения (например, сигнал напряжения). Каждый из датчиков положения может включать в себя ряд переключателей контактного типа, ряд переключателей FET (FET - транзистор с полевым эффектом) или другую подходящую технологию определения положения.
Сигналы положения составляют сигнал передаточного отношения, показывающий выбранное передаточное отношение, и принимаются прямо или непрямо контроллером 13, который использует их, чтобы определить, открывать или закрывать отклонитель 26. В случае, когда транспортное средство 10 имеет единственный контроллер 13, ответственный за режим отклонения потока скорости, контроллер 13 принимает эти сигналы прямо. В случае, когда транспортное средство 10 имеет множество контроллеров для режима отклонения потока скорости, они могут приниматься прямо другим контроллером (например, первым контроллером в примере выше с тремя контроллерами), который транслирует соответствующие сообщения в шину CAN, принимаемые третьим контроллером (т.е. контроллером 13) для управления отклонителем 26. Вместо транслирования двух сообщений, первый контроллер может транслировать одно сообщение в шину CAN, при этом это одно сообщение содержит как информацию о направлении FNR, так и информацию о передаточном отношении, не имеющем направления, чтобы составить сигнал передаточного отношения, принимаемый третьим контроллером для управления отклонителем 26, или это одно сообщение может содержать только информацию о передаточном отношении, не имеющем направления.
Активация отклонения потока может зависеть или не зависеть от направления, т.е. от того, какое было выбрано направление - прямое, нейтральное или обратное. В качестве примера, как упоминалось выше, отклонение потока активируется только если выбранное передаточное отношение представляет собой третье или четвертое передаточное отношение по направлению вперед, и, например, является FNR или зависящим от направления. Другими словами, отклонение потока не активируется, если выбранное передаточное отношение - обратное или нейтральное, и в этом случае выбранное передаточное отношение и порог передаточного отношения имеют компонент направления и компонент передаточного отношения. Транспортное средство 10 может работать в обратном направлении и на более высоких передаточных отношениях только в течение небольших интервалов времени (например, третье передаточное отношение в применении экскаваторной погрузочной машины, имеющей три обратных передаточных отношения), и в этом случае эффективность использования топлива может быть лишь минимально затронута, если отклонение потока должно было активироваться в эти промежутки времени.
В других примерах активация отклонения потока может быть независимой от того, какое направление было выбрано - вперед или обратно. Другими словами, отклонение потока может быть активировано как в прямом, так и в обратном направлениях. Однако отклонение потока все еще не активировалось бы в нейтральном положении. В этом случае выбранное передаточное отношение и порог передаточного отношения могут иметь компонент направления и компонент передаточного отношения.
В еще одних, других примерах активация отклонения потока может быть полностью независимой от направления. Другими словами, выбранное передаточное отношение и порог передаточного отношения могут иметь компонент передаточного отношения, но не компонент направления, поскольку скорость относительно земли также принималась бы в расчет перед активацией режима отклонения потока скорости.
Что касается режима отклонения потока давления, множество настроек порогов давления может быть выбрано соответственно для разных инструментальных секций рабочего транспортного средства 10. Например, в контексте экскаваторной погрузочной машины может быть первая настройка порога давления для экскаваторной секции 37 (например, для копания траншеи), и вторая настройка порога давления для погрузочной секции 38 (например, для копания в куче), которая может быть такой же или отличаться от первой настройки порога давления. Каждая настройка может выбираться оператором согласно процессу, раскрытому в материалах настоящей заявки, для выбора настройки порога давления. Если обе могут выбираться оператором, может быть меню давления экскаватора и меню давления погрузчика, каждое из которых может быть выбрано для отображения на экранном мониторе устройства 36 ввода оператора, чтобы ввести настройку порога давления для соответствующей секции. Например, контроллер 13 может принимать сигнал первого порога давления, показывающий настройку первого порога давления, и сигнал второго порога давления, показывающий настройку второго порога давления, и может хранить эти настройки в своей памяти. Альтернативно, каждая настройка может быть заранее задана в программном обеспечении (например, во время процесса производства). Если каждая настройка может выбираться оператором, настройка по умолчанию может быть заранее задана в программном обеспечении в случае, если оператор решит не выбирать настройку.
Транспортное средство 10 может иметь датчик 78 секции, определяющий, какая из экскаваторной секции 37 (или, в более общем смысле, первой инструментальной секции) и погрузочной секции 38 (или, в более общем смысле, второй инструментальной секции) находится в фокусе (например, включена или, иначе, секция, которая должна работать). Транспортное средство 10 может иметь сиденье 80 оператора, устанавливаемое в положение экскаватора, обращенное к экскаваторной секции 37, и в противоположное положение погрузчика, обращенное к погрузочной секции 38. Датчик 78 секции представляет собой, например, датчик положения сиденья, определяющий, в каком из положения экскаватора и положения погрузчика расположено сиденье 80 оператора. Чтобы определить положение сиденья, датчик может быть переключателем (например, в первом примере экскаваторной погрузочной машины), датчиком круговых перемещений (например, во втором примере экскаваторной погрузочной машины), датчиком на эффекте Холла или потенциометром, чтобы назвать лишь несколько примеров. В других примерах датчик 78 секции может быть органом управления ввода оператора (например, через экранный монитор устройства 36 ввода оператора), с помощью которого оператор может выбирать, какая секция должна быть в фокусе.
Контроллер 13 может быть соединен электрически с датчиком 78 секции, принимающим сигнал секции, показывающим, какая из экскаваторной секции 37 и погрузочной секции 38 находится в фокусе, и выбирать первую настройку порога давления в качестве выбранной настройки порога давления, если экскаваторная секция 37 находится в фокусе, или вторую настройку порога давления в качестве выбранной настройки порога давления, если погрузочная секция 38 находится в фокусе.
Как показано на ФИГ. 6, согласно разновидности программы 54 управления, в действии 130 контроллер 13 принимает сигнал первой настройки порога давления, показывающий первую настройку порога давления и/или сигнал второй настройки порога давления, показывающий вторую настройку порога давления, если такая настройка(и) может выбираться оператором. В действии 132 контроллер 13 принимает сигнал секции, показывающий, какая из экскаваторной секции 37 и погрузочной секции 38 находится в фокусе. В действии 134 контроллер 13 определяет, какая из экскаваторной секции 37 и погрузочной секции 38 находится в фокусе. В действии 136 контроллер 13 выбирает первую настройку порога давления в качестве выбранной настройки порога давления, если экскаваторная секция 37 находится в фокусе, или вторую настройку порога давления в качестве выбранной настройки порога давления, если погрузочная секция 38 находится в фокусе. В действии 138 контроллер 13 принимает сигнал давления подачи, показывающий давление подачи. В действии 140 контроллер 13 определяет, является ли давление подачи, по меньшей мере, выбранной настройкой порога давления. Если да, программа 54 управления переходит к действию 116, в котором контроллер 13 выдает команду отклонителю 26 открыться. Если нет, программа управления переходит к действию 118, в котором контроллер 13 выдает команду отклонителю 26 закрыться.
Что касается этого режима отклонения потока, контроллер 13 может принимать упомянутые сигналы напрямую или опосредованно (т.е., сигнал секции, сигнал давления подачи и, в случае возможности выбора оператором, сигнал первого порога давления и/или сигнал второго порога давления). В случае, когда транспортное средство 10 имеет множество контроллеров, они могут приниматься прямо другим контроллером (например, первым контроллером в примере выше с тремя контроллерами), который транслирует соответствующие сообщения в шину CAN, принимаемые третьим контроллером (т.е. контроллером 13) для управления отклонителем 26. Сигнал давления подачи может быть принят и перенаправлен к (третьему) контроллеру 13, как раскрыто выше, и сигналы первого и второго порога давления могут быть приняты и перенаправлены к (третьему) контроллеру 13, как с сигналом порога давления, раскрытым выше. Сигнал секции может быть принят первым контроллером, который может транслировать сообщение в шину CAN, показывающее, какая из экскаваторной секции 37 и погрузочной секции 38 находится в фокусе (сам сигнал секции, показывающий, какая из экскаваторной секции 37 и погрузочной секции 38 находится в фокусе). (Третий) контроллер 13 может принимать это сообщение и соответствующим образом управлять отклонителем 26.
Режим отклонения потока (т.е. "режим отклонения потока давления") может использоваться с любым рабочим транспортным средством, имеющим множество инструментальных секций, каждая из которых имеет одну или более функций транспортного средства 10. Экскаваторная погрузочная машина является лишь одним типом транспортного средства, с которым может быть использован этот режим отклонения потока. Например, транспортное средство 10 может иметь только один распределительный клапан для инструментальных секций или множество распределительных клапанов, каждый их которых специализируется на соответствующей одной из инструментальных секций или обслуживает одну или более функцию более чем одной инструментальной секции.
Ссылка на CAN в материалах настоящей заявки представляет собой лишь один пример подходящего протокола связи для сети контроллеров. Могут быть использованы другие протоколы связи, такие как, например, LIN, Ethernet и т.д.
Несмотря на то что изобретение было проиллюстрировано и подробно описано в предшествующем описании и чертежах, эти описание и иллюстрации должны рассматриваться в качестве не ограничивающих иллюстративных примеров вариантов его осуществления, включающих любые изменения и модификации. Очевидно, что альтернативные варианты осуществления настоящего раскрытия могут не включать в себя все описанные признаки. Специалисты в данной области техники могут без труда разработать свои собственные варианты исполнения, которые включают в себя один или более признаков настоящего раскрытия и попадают в объем настоящего изобретения, определенного прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ШУМА, ВИБРАЦИИ И РЕЗКОСТИ РАБОТЫ СИЛОВОГО АГРЕГАТА ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2696175C2 |
| РАБОЧАЯ МАШИНА С РЕГУЛИРОВАНИЕМ ПРЕДЕЛА МОЩНОСТИ С ИСПОЛЬЗОВАНИЕМ БЕССТУПЕНЧАТОЙ ТРАНСМИССИИ | 2008 |
|
RU2497033C2 |
| Система и способ для двигателя с отключаемыми цилиндрами | 2018 |
|
RU2704124C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ РАБОЧЕЙ МАШИНЫ | 2010 |
|
RU2517141C2 |
| СПОСОБЫ ДЛЯ ВЫЯВЛЕНИЯ ИЗНОСА ЦИЛИНДРА НАСОСА ВЫСОКОГО ДАВЛЕНИЯ | 2015 |
|
RU2684047C2 |
| Автоматизированный агрегат для дифференцированного внесения жидких минеральных удобрений | 2017 |
|
RU2676319C1 |
| СПОСОБ УПРАВЛЕНИЯ И ДИАГНОСТИКИ ДВИГАТЕЛЯ | 2015 |
|
RU2672550C2 |
| СПОСОБ И СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ВПРЫСКА ВОДЫ | 2017 |
|
RU2701791C2 |
| АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ЦЕНТРИРОВАНИЕ СИСТЕМЫ РУЛЕВОГО УПРАВЛЕНИЯ | 2015 |
|
RU2684824C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ДАТЧИКА ВЫПУСКНОЙ ТЕКУЧЕЙ СРЕДЫ (ВАРИАНТЫ) | 2012 |
|
RU2625418C2 |
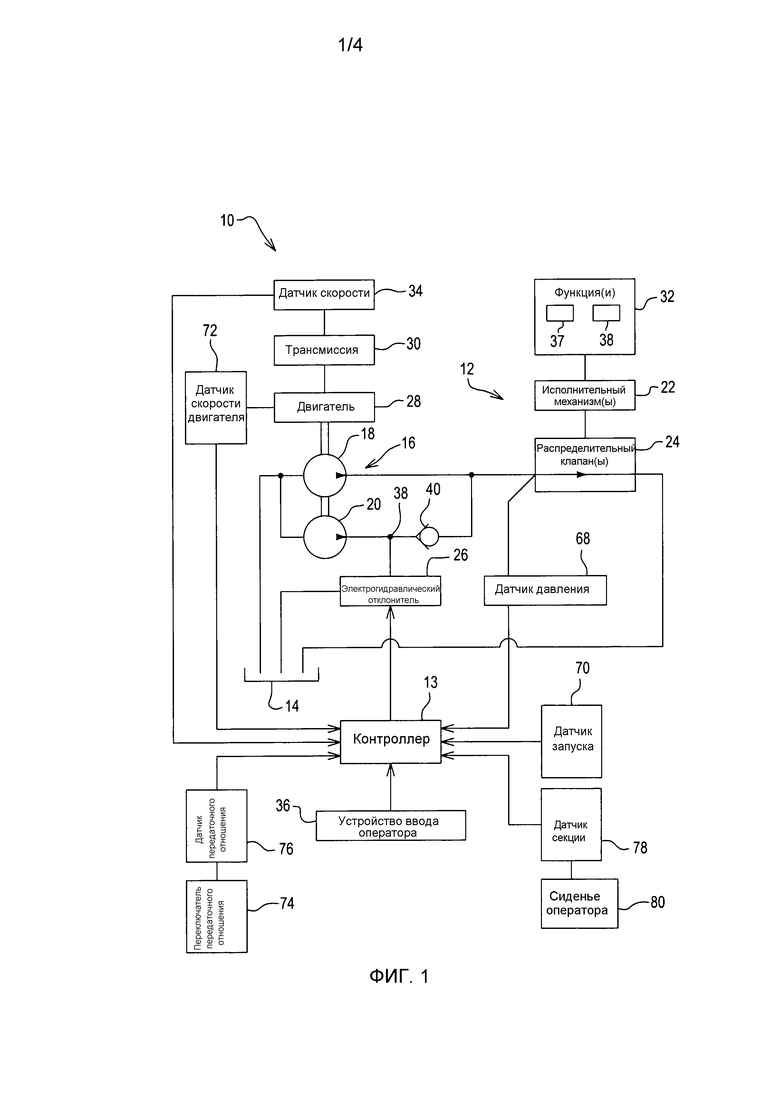
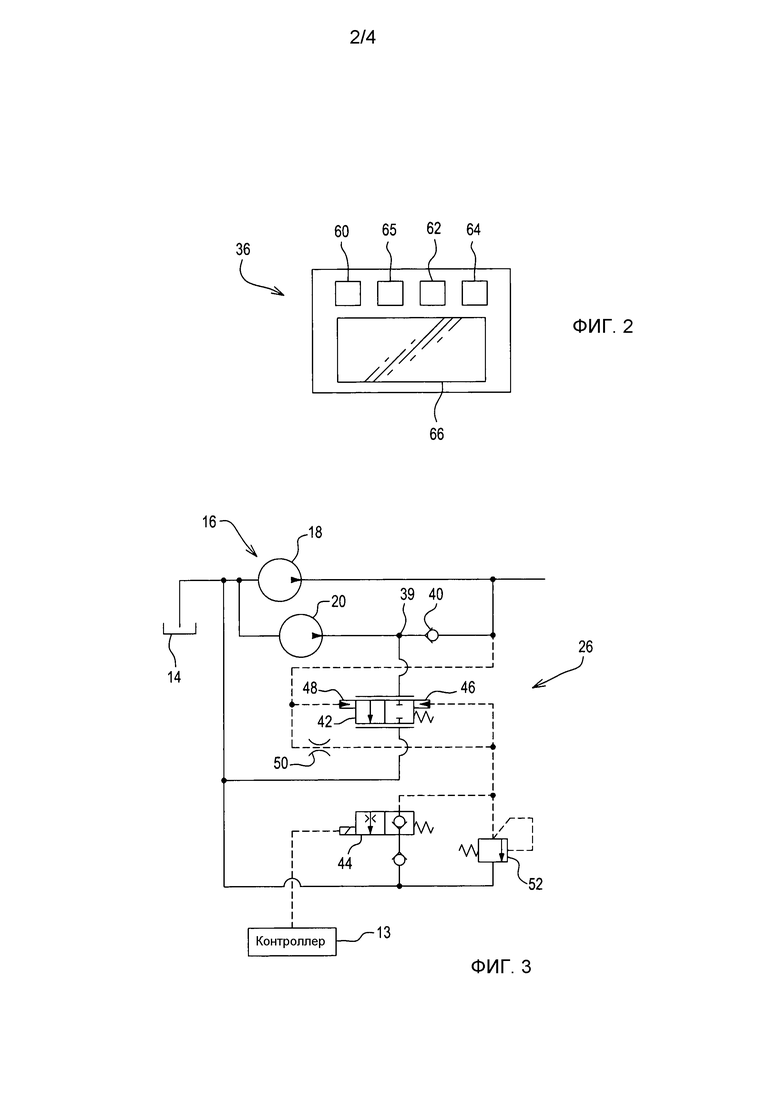
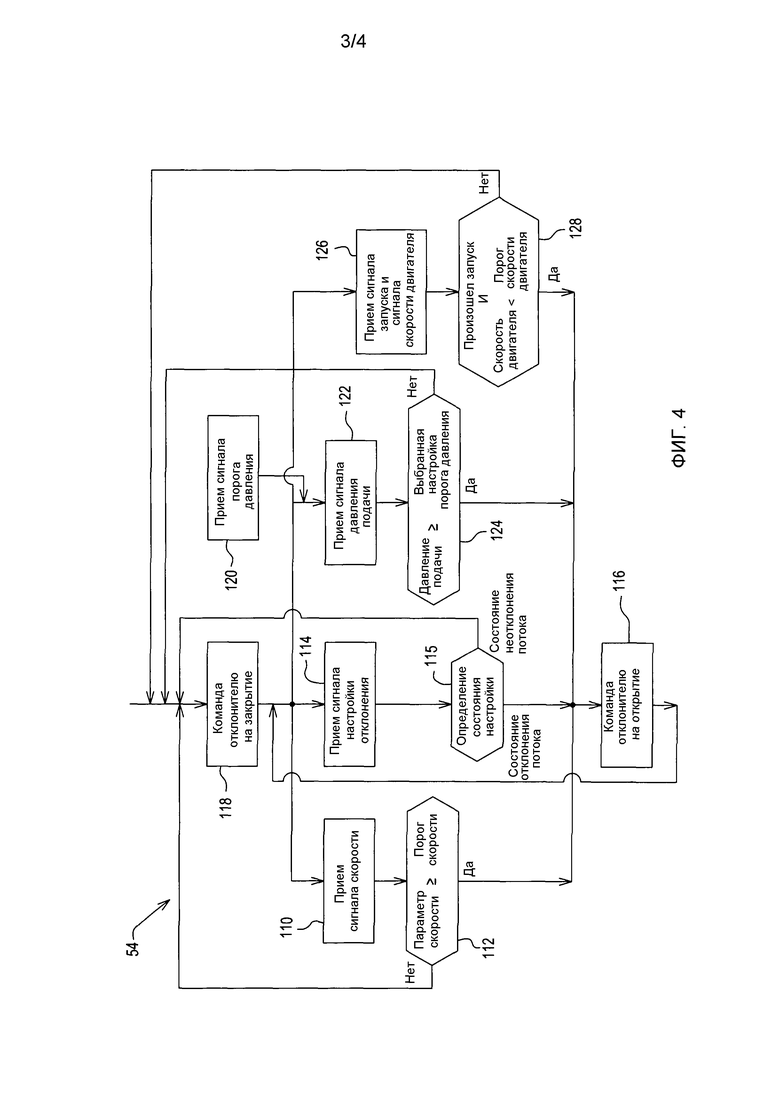
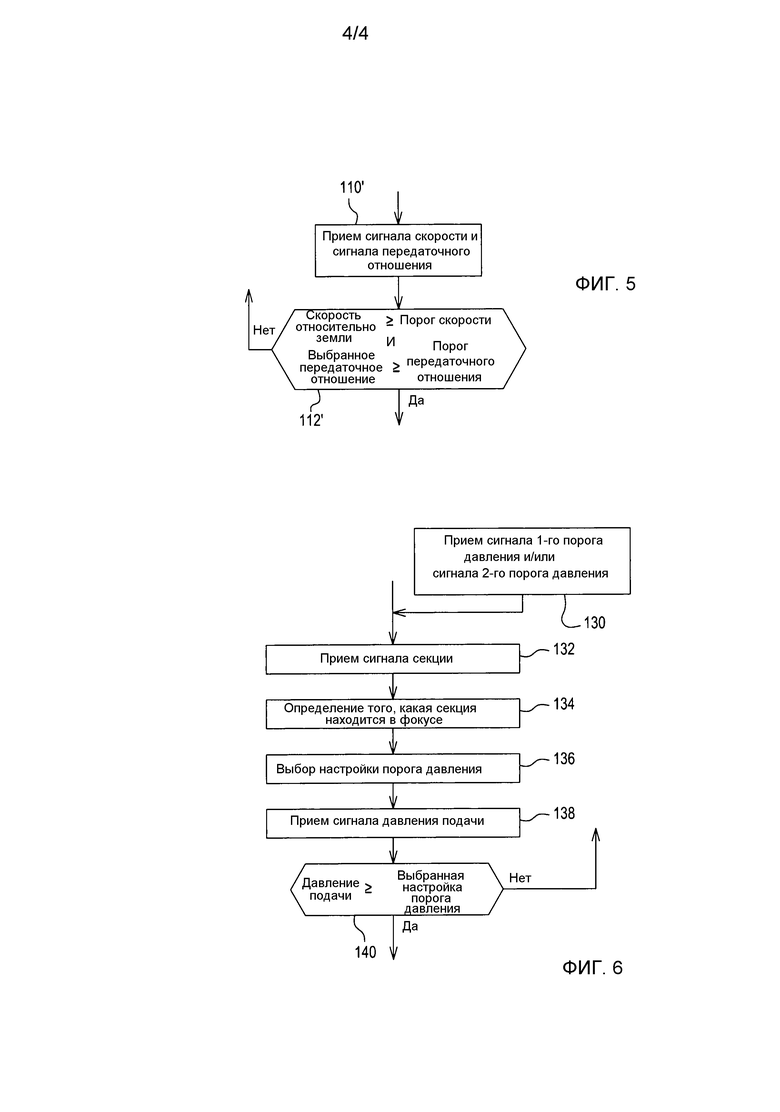
Изобретение относится к способу отклонения потока из насоса в многонасосной системе. Рабочее транспортное средство содержит резервуар для текучей среды; первый и второй насос с постоянным расходом, причем потоки обоих насосов параллельны друг другу; исполнительный механизм; распределительный клапан с открытым центром, расположенный по текучей среде между группой насосов и исполнительным механизмом; электрогидравлический отклонитель, соединенный по текучей среде с точкой между вторым насосом и распределительным клапаном и с резервуаром для текучей среды; датчик скорости рабочего транспортного средства. Устройство ввода оператора обеспечивает ручной выбор настройки отклонения вне зависимости от положения сиденья транспортного средства. Контроллер принимает сигнал скорости или настройки отклонения. Определяет, удовлетворяет ли параметр скорости заданному критерию или определяет состояние выбранной настройки отклонения. Затем выдает команды отклонителю на открытие, если параметр скорости удовлетворяет заданному критерию или если выбранная настройка отклонения находится в состоянии отклонения потока. Повышается эффективность работы. 4 н. и 15 з.п. ф-лы, 6 ил.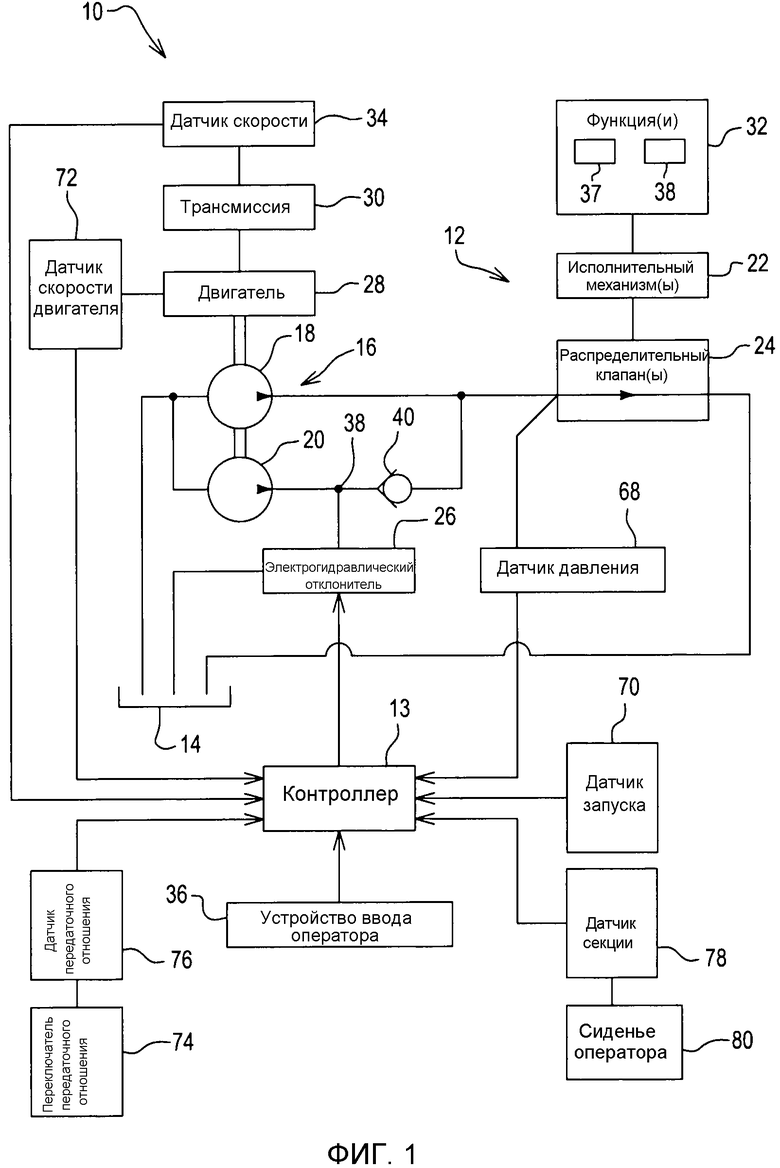
1. Рабочее транспортное средство, содержащее:
резервуар для текучей среды;
группу насосов, содержащую первый насос с постоянным расходом и второй насос с постоянным расходом, причем потоки первого и второго насосов параллельны друг другу;
исполнительный механизм;
распределительный клапан с открытым центром, расположенный по текучей среде между группой насосов и исполнительным механизмом;
электрогидравлический отклонитель, соединенный по текучей среде с точкой между вторым насосом и распределительным клапаном и с резервуаром для текучей среды, для отклонения потока от второго насоса к резервуару для текучей среды, когда отклонитель открыт;
датчик скорости, установленный для измерения параметра скорости рабочего транспортного средства, или устройство ввода оператора, выполненное с возможностью ручного выбора настройки отклонения вне зависимости от любого положения сиденья рабочего транспортного средства; и
контроллер, выполненный с возможностью:
принятия сигнала скорости, показывающего параметр скорости, или сигнала настройки отклонения, показывающего выбранную настройку отклонения,
определения, удовлетворяет ли параметр скорости заданному критерию скорости, или определения состояния выбранной настройки отклонения, и
выдачи команды отклонителю на открытие, если параметр скорости удовлетворяет заданному критерию скорости, или если выбранная настройка отклонения находится в состоянии отклонения потока.
2. Рабочее транспортное средство по п. 1, содержащее датчик скорости, установленный для измерения параметра скорости, при этом контроллер выполнен с возможностью принятия сигнала скорости, показывающего параметр скорости, определения, удовлетворяет ли параметр скорости заданному критерию скорости, и, если так, выдачи команды отклонителю на открытие.
3. Рабочее транспортное средство по п. 2, в котором параметр скорости представляет собой показатель скорости относительно земли рабочего транспортного средства.
4. Рабочее транспортное средство по п. 2, в котором контроллер выполнен с возможностью определения, является ли параметр скорости, по меньшей мере, порогом скорости, и, если так, выдачи команды отклонителю на открытие.
5. Рабочее транспортное средство по п. 2, содержащее переключатель передаточного отношения и датчик передаточного отношения, выполненный с возможностью определения передаточного отношения, выбранного с помощью переключателя передаточного отношения, причем контроллер выполнен с возможностью принятия сигнала скорости, показывающего скорость относительно земли рабочего транспортного средства, в качестве параметра скорости, и сигнала передаточного отношения, показывающего выбранное передаточное отношение, определения, является ли скорость относительно земли, по меньшей мере, порогом скорости, и является ли выбранное передаточное отношение, по меньшей мере, порогом передаточного отношения, и выдачи команды отклонителю на открытие, если скорость относительно земли является, по меньшей мере, порогом скорости, и выбранное передаточное отношение является, по меньшей мере, порогом передаточного отношения.
6. Рабочее транспортное средство по п. 5, в котором контроллер выполнен с возможностью выдачи команды отклонителю на закрытие, если скорость относительно земли является, по меньшей мере, порогом скорости, но выбранное передаточное отношение ниже порога передаточного отношения.
7. Рабочее транспортное средство по п. 1, содержащее устройство ввода оператора, выполненное с возможностью ручного выбора настройки отклонения независимо от любого положения сиденья рабочего транспортного средства, при этом контроллер выполнен с возможностью принятия сигнала настройки отклонения, показывающего выбранную настройку отклонения, определения состояния выбранной настройки отклонения и выдачи команды отклонителю на открытие, если выбранная настройка отклонения находится в состоянии отклонения потока.
8. Рабочее транспортное средство по п. 7, в котором устройство ввода оператора содержит экранный монитор, выполненный с возможностью ручного выбора настройки отклонения.
9. Рабочее транспортное средство по п. 7, в котором запрос отклонения оператора представляет собой прямой запрос от оператора.
10. Рабочее транспортное средство по п. 7, в котором контроллер выполнен с возможностью выдачи команды отклонителю на закрытие, если выбранная настройка отклонения находится в состоянии неотклонения потока.
11. Рабочее транспортное средство по п. 1, представляющее собой экскаваторную погрузочную машину, имеющую экскаваторный режим, чтобы управлять экскаваторной секцией экскаваторной погрузочной машины, и погрузочный режим, чтобы управлять погрузочной секцией экскаваторной погрузочной машины, причем контроллер выполнен с возможностью выдачи команды отклонителю на открытие в каждом из погрузочного режима и экскаваторного режима, если выбранная настройка отклонения находится в состоянии отклонения потока.
12. Рабочее транспортное средство, содержащее:
гидравлическую систему, содержащую
резервуар для текучей среды,
группу насосов, содержащую первый насос с постоянным расходом и второй насос с постоянным расходом, причем потоки первого и второго насосов параллельны друг другу,
исполнительный механизм,
распределительный клапан с открытым центром, расположенный по текучей среде между группой насосов и исполнительным механизмом,
электрогидравлический отклонитель, соединенный по текучей среде с точкой между вторым насосом и распределительным клапаном и с резервуаром для текучей среды, для отклонения потока от второго насоса к резервуару для текучей среды, когда отклонитель открыт, и
датчик давления, установленный для измерения давления подачи в гидравлической системе;
устройство ввода оператора, выполненное с возможностью ручного выбора настройки порога давления; и
контроллер, выполненный с возможностью:
принятия сигнала давления подачи, показывающего давление подачи, и сигнала порога давления, показывающего выбранную настройку порога давления,
определения, является ли давление подачи, по меньшей мере, выбранной настройкой порога давления, и,
если так, выдачи команды отклонителю на открытие.
13. Рабочее транспортное средство по п. 12, в котором устройство ввода оператора содержит экранный монитор, выполненный с возможностью ручного выбора настройки порога давления.
14. Рабочее транспортное средство, содержащее:
резервуар для текучей среды;
группу насосов, содержащую первый насос с постоянным расходом и второй насос с постоянным расходом, причем потоки первого и второго насосов параллельны друг другу;
исполнительный механизм;
распределительный клапан с открытым центром, расположенный по текучей среде между группой насосов и исполнительным механизмом;
электрогидравлический отклонитель, соединенный по текучей среде с точкой между вторым насосом и распределительным клапаном и с резервуаром для текучей среды, для отклонения потока от второго насоса к резервуару для текучей среды, когда отклонитель открыт;
датчик запуска, установленный для определения запуска рабочего транспортного средства;
двигатель;
датчик скорости двигателя, установленный для определения скорости вращения двигателя ("скорости двигателя"); и
контроллер, выполненный с возможностью:
принятия сигнала запуска, показывающего запуск рабочего транспортного средства, и сигнала скорости двигателя, показывающего скорость двигателя,
определения, произошел ли запуск рабочего транспортного средства, и является ли скорость двигателя ниже порога скорости двигателя, и
выдачи команды отклонителю на открытие, если запуск рабочего транспортного средства произошел и скорость двигателя ниже порога скорости двигателя.
15. Рабочее транспортное средство по п. 14, в котором датчик запуска представляет собой кнопочный переключатель, и контроллер электрически соединен с кнопочным переключателем.
16. Рабочее транспортное средство по п. 14, в котором датчик скорости двигателя представляет собой генератор переменного тока, функционально соединенный с двигателем, и контроллер электрически соединен с генератором переменного тока.
17. Рабочее транспортное средство по п. 14, в котором порог скорости двигателя представляет собой ненулевое значение ниже скорости холостого хода двигателя.
18. Рабочее транспортное средство, содержащее:
первую инструментальную секцию;
вторую инструментальную секцию;
датчик секции, выполненный с возможностью определения, какая из первой инструментальной секции и второй инструментальной секции находится в фокусе;
гидравлическую систему, содержащую
резервуар для текучей среды,
группу насосов, содержащую первый насос с постоянным расходом и второй насос с постоянным расходом, причем потоки первого и второго насосов параллельны друг другу,
распределительную клапанную систему с открытым центром,
электрогидравлический отклонитель, соединенный по текучей среде с точкой между вторым насосом и распределительной клапанной системой и с резервуаром для текучей среды, для отклонения потока от второго насоса к резервуару для текучей среды, когда отклонитель открыт, и
датчик давления, установленный для измерения давления подачи в гидравлической системе; и
контроллер, выполненный с возможностью:
принятия сигнала давления подачи, показывающего давление подачи, и сигнала секции, показывающего какая из первой инструментальной секции и второй инструментальной секции находится в фокусе,
определения, какая из первой инструментальной секции и второй инструментальной секции находится в фокусе,
выбора первой настройки порога давления в качестве выбранной настройки порога давления, если первая инструментальная секция находится в фокусе, или второй настройки порога давления в качестве выбранной настройки порога давления, если вторая инструментальная секция находится в фокусе,
определения, является ли давление подачи, по меньшей мере, выбранной настройкой порога давления, и,
если так, выдачи команды отклонителю на открытие.
19. Рабочее транспортное средство по п. 18, в котором первая инструментальная секция является экскаваторной секцией, а вторая инструментальная секция является погрузочной секцией.
| US 3796336 A, 12.03.1974;US 3916624 A, 04.11.1975;US 3916767 A, 04.11.1975;US 3975909 A, 24.08.1976;EA 200802291 A1, 30.06.2009. |

