ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ (ЗАЯВКИ)
[0001] Отсутствует.
ЗАЯВЛЕНИЕ О ФИНАНСИРУЕМЫХ ИЗ ФЕДЕРАЛЬНОГО БЮДЖЕТА ИССЛЕДОВАНИЯХ ИЛИ РАЗРАБОТКАХ
[0002] Отсутствует.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ РАСКРЫТИЕ
[0003] Настоящее изобретение относится к рулевому управлению транспортными средствами, включая транспортные средства с самоустанавливающимися задними колесами.
УРОВЕНЬ ТЕХНИКИ
[0004] В различных установках, может быть важным относительно точное рулевое управление транспортными средствами. Например, в сельскохозяйственных установках может быть важным точное рулевое управление сельскохозяйственным транспортным средством в поле для того, чтобы сеять, ухаживать, убирать или иным образом обрабатывать сельскохозяйственные культуры или другой материал.
[0005] В некоторых транспортных средствах, конфигурация одного комплекта колес может отличаться от конфигурации другого комплекта колес. Например, в различных комбайнах, валкоукладчиках или других транспортных средствах, задний комплект колес может быть установлен на поворотных шкворнях, тогда как передний комплект колес может быть установлен на фиксированной оси (или осях). В некоторых вариантах осуществления, передние колеса могут быть зафиксированы с ориентацией с обращением вперед (т.е., могут быть выполнены без возможности поворота в стороны для направления транспортного средства). В подобной конфигурации, транспортное средство может направляться посредством передних колес за счет приведения передних колес в движение со скоростями, отличающимися друг от друга. Например, для каждого из передних колес может предоставляться выделенный гидравлический механизм (например, выделенный гидравлический насос), так что каждое колесо можно приводить в действие независимо от других.
[0006] Может быть необходимым создать систему управления рулением как передних, так и задних колес транспортных средств данных типов, а также колес транспортных средств, имеющих различные другие конфигурации. Известные способы управления рулением могут включать, например, использование реечного приспособления, которое механически соединено с устройством ввода руления (например, рулевым колесом), механизма Аккермана или другого механического устройства. По мере того, как устройство ввода руления перемещается оператором, оно может механически вращать шестерню относительно рейки, посредством этого механически приводя в движение рейку (или иным образом перемещать соответствующее механическое устройство). Перемещение рейки (или другого устройства) может, в свою очередь, например, управлять рулением комплекта передних колес или комплекта задних колес. Что касается задних колес, например, механическое перемещение рейки и шестерни может механически переносить поток гидравлической жидкости в гидравлические цилиндры в задней части транспортного средства для того, чтобы управлять рулением комплекта задних колес.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0007] Предложены система рулевого управления и способ для транспортного средства, имеющего управляемые колеса.
[0008] Согласно одному аспекту раскрытия, рулевое устройство может быть соединено с одним или более колесами. Может определяться состояние парковки транспортного средства и текущая ориентация гидравлического рулевого устройства. Текущая ориентация рулевого устройства может сравниваться с нейтральной ориентацией рулевого устройства. На основании определяемого состояния парковки транспортного средства и сравнения текущей и нейтральной ориентаций рулевого устройства, рулевое устройство может перемещаться из текущей ориентации в нейтральную ориентацию.
[0009] В некоторых вариантах осуществления, перед определением, находится ли транспортное средство в состоянии парковки, контроллер может определять, находится ли транспортное средство в настоящее время в состоянии пониженного уровня мощности. Определение, находится ли транспортное средство в состоянии парковки, может происходить на основании определения, находится ли устройство управления для перемещения сельскохозяйственного транспортного средства в пределах нейтрального диапазона в течение заданного временного интервала, и определения, активирован ли устройством управления стояночный переключатель в течение заданного временного интервала.
[0010] В некоторых вариантах осуществления, датчик рулевого управления во взаимодействии с устройством ввода руления может предоставлять входной сигнал рулевого управления на основании определения датчиком рулевого управления ручного ввода руления. В режиме содействия рулевому управлению задними колесами, команда управления задними колесами может определяться на основании входного сигнала рулевого управления. В автоматическом режиме управления, команда управления задними колесами может определяться независимо от ручного ввода руления. Автоматический режим управления может заканчиваться на основании получения ручного ввода руления, в устройстве ввода руления.
[0011] В некоторых вариантах осуществления, контроллер может определять, находится ли текущая ориентация рулевого устройства в пределах заданного диапазона относительно нейтральной ориентации. Если определено, что текущая ориентация находится в пределах заданного диапазона, может предоставляться управляющая команда перемещения рулевого устройства в течение заданного временного интервала.
[0012] В некоторых вариантах осуществления, заданное направление перемещения рулевого устройства может определяться на основании управляющей команды. Может определяться фактическое направление перемещения рулевого устройства. Фактическое направление перемещения может сравниваться с заданным направлением перемещения, и если фактическое направление перемещения не такое же, как заданное направление перемещения в течение заданного временного интервала, управление рулевым устройством может останавливаться, или двигатель может выключаться.
[0013] В некоторых вариантах осуществления, может определяться условие останова двигателя. Перед достижением двигателем условия останова может определяться, переместилось ли рулевое устройство из нейтральной ориентации в пределы заданного диапазона. Может определяться окончание условия останова. Оператору может предоставляться указатель для руководства ручным центрированием оператором рулевого устройства посредством ручного ввода руления, в устройстве ввода руления, после того, как было определено окончание условия останова.
[0014] На сопровождающих чертежах и в описании ниже изложены подробности одного или более вариантов осуществления. Другие признаки и преимущества станут очевидны из описания, чертежей и формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015] ФИГ. 1 представляет собой упрощенное изображение иллюстративного сельскохозяйственного транспортного средства с задними самоустанавливающимися колесами;
[0016] ФИГ. 2 представляет собой схематичное изображение иллюстративной системы рулевого управления для транспортного средства с задними самоустанавливающимися колесами;
[0017] ФИГ. 3 представляет собой схематичное изображение еще одной иллюстративной системы рулевого управления для транспортного средства с задними самоустанавливающимися колесами;
[0018] ФИГ. 4 представляет собой схематичное изображение еще одной иллюстративной системы рулевого управления для транспортного средства с задними самоустанавливающимися колесами;
[0019] ФИГ. 5 представляет собой схематичное изображение иллюстративной гидравлической системы, содержащейся в иллюстративной системе рулевого управления ФИГ. 4;
[0020] ФИГ. 6 представляет собой схематичное изображение способа управления рулением, который может осуществляться с гидравлической системой ФИГ. 5;
[0021] ФИГ. 7 представляет собой еще одно схематичное изображение способа управления рулением ФИГ. 6;
[0022] ФИГ. 8 представляет собой схематичное изображение способа определения неисправностей, который может осуществляться для гидравлической системы ФИГ. 5;
[0023] ФИГ. 9 представляет собой схематичное изображение еще одного способа управления рулением, который может осуществляться с гидравлической системой ФИГ. 5; а
[0024] ФИГ. 10 представляет собой схематичное изображение дополнительных аспектов способа управления рулением ФИГ. 9.
[0025] Одинаковые ссылочные обозначения на различных чертежах обозначают одинаковые элементы.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0026] Далее описаны один или более иллюстративных вариантов осуществления раскрытых систем (и способов) рулевого управления, которые показаны на сопровождающих фигурах чертежей, кратко описанных выше. Специалист в данной области техники может предусмотреть различные модификации иллюстративных вариантов осуществления.
[0027] Также как отмечалось выше, в известных системах рулевого управления в качестве главного элемента соединения между устройством ввода руления (например, рулевым колесом) и системой управления для рулевого управления различными колесами транспортного средства может использоваться механическое соединение. Например, для связи рулевого колеса с колесами транспортного средства, или с рулевым устройством, соединенным с колесами, может использоваться реечный узел или механизм Аккермана. Однако, использование подобного механического соединения может препятствовать различным стратегиям автоматизации (включая частичную автоматизацию) рулевого управления. Например, в известных комбайнах, механическое соединение (например, реечное приспособление или механизм Аккермана) может использоваться для соединения устройства ввода руления (например, рулевого колеса) с устройством рулевого управления (например, регулирующим клапаном для гидравлического насоса или двигателя) таким образом, что всякое приложение ручного ввода руления, получаемого в устройстве ввода руления, передается посредством механического соединения с устройством рулевого управления. Соответственно, для того, чтобы управлять транспортным средством, оператор может обеспечивать ручной ввод руления на устройство ввода руления, заставляя посредством этого механическое соединение механически управлять устройством рулевого управления.
[0028] Однако, при такой конфигурации для того, чтобы переходить от ручного рулевого управления к автоматическому (или частично автоматическому) управлению, должны предоставляться различные системы или устройства, чтобы обходить (или игнорировать или иным образом отключать) всякое механическое управление, обеспечиваемое посредством механического соединения. Это может усложнять (или иным образом препятствовать) автоматизации рулевого управления передними и задними колесами для транспортного средства. В некоторых случаях, например, может предоставляться двигатель, который преобразует автоматические управляющие команды в механическое перемещение устройства ввода руления, по существу заменяя посредством этого ручной ввод руления на устройство ввода руления автоматическим механическим вводом руления на устройство ввода руления. Это может придавать системе рулевого управления существенную сложность, и у некоторых операторов автоматическое перемещение устройства ввода руления может вызывать затруднения.
[0029] Для решения данных и других проблем, может быть полезно предоставить систему (и способ) рулевого управления, в которой операции рулевого управления передними и задними колесами регулируются, по меньшей мере частично, гидравлическими клапанными узлами и различными гидравлическими контурами. Кроме того, может быть полезно предоставить систему рулевого управления, в которой было устранено механическое соединение между устройством ввода руления и устройством рулевого управления передними или задними колесами транспортного средства. Таким образом, можно добиться более продуктивного и эффективного перехода между автоматическим и неавтоматическим рулевым управлением.
[0030] В некоторых вариантах осуществления, устройство ввода руления может быть выполнено с возможностью приведения в действие гидравлического клапана рулевого управления (например, клапана с ручным управлением) на основании ручного ввода руления, получаемого в устройстве ввода руления. Тогда гидравлический поток через клапан рулевого управления, которым управляют посредством ручного ввода руления, может быть использован для управления рулением транспортного средства посредством регулирования различных рулевых устройств с гидравлическим приводом (например, различных поршней двустороннего действия) для одного или более колес транспортного средства (например, двух передних колес и двух задних колес). Также могут предоставляться различные гидравлические управляющие контуры, которые могут быть выполнены с возможностью предоставления в различные рулевые устройства сигналов автоматического рулевого управления. Вследствие того, что для передачи ручного ввода руления, от устройства ввода руления в различные устройства рулевого управления может использоваться немеханическое (например, гидравлическое) соединение, для управления различными гидравлическими рулевыми устройствами может быть возможно относительно легко переходить от ручного рулевого управления к автоматическому рулевому управлению посредством избирательного применения гидравлических управляющих контуров, а не устройства ввода руления.
[0031] В некоторых вариантах осуществления, два передних колеса транспортного средства могут быть выполнены с возможностью независимого вращения, соответственно, отдельными гидравлическими двигателями (например, поршневыми двигателями с наклонной шайбой). Двигатели, в свою очередь, можно приводить во вращение, соответственно, отдельными гидравлическими насосами. Для того, чтобы регулировать скорость гидравлических насосов, клапан рулевого управления с ручным приводом может быть выполнен с возможностью регулировки гидравлического потока в каждый конец поршня двустороннего действия (и цилиндра). Противоположные концы поршня могут находиться в механическом (или ином) сообщении с гидравлическими насосами, так что положение поршня регулирует относительные скорости каждого из насосов. Таким образом, конкретное приложение ручного ввода руления может приводить к конкретному потоку через клапан рулевого управления с ручным управлением. Данный поток может перемещать поршень двустороннего действия в конкретное положение, и поршень посредством этого может заставлять гидравлический насосы (и, соответственно, гидравлические двигатели и передние колеса) действовать с конкретными скоростями. В частности, вследствие того, что гидравлические двигатели для передних колес можно приводить в действие отдельными гидравлическими насосами по отдельности, имеется возможность приведения передних колес в движение с различными скоростями (например, на основании ручного ввода руления) и посредством этого управления транспортным средством.
[0032] Также может иметься возможность управления передними колесами автоматически, а не на основании ручного ввода руления. Например, передний гидравлический клапанный узел с электронным (или иным) приводом также может находиться во взаимодействии с поршнем двустороннего действия для рулевого управления передними колесами. Затем, для автоматического управления передними колесами, вместо ручного ввода руления, могут использоваться управляющие сигналы (т.е., конкретные гидравлические потоки и давления) от данного клапанного узла. В частности, в подобной конфигурации, транспортное средство может переходить от ручного рулевого управления к автоматическому рулевому управлению, за счет перехода управления поршнем двустороннего действия от клапана рулевого управления с ручным приводом (как обсуждалось выше) к переднему клапанному узлу с автоматическим приводом. Например, клапан рулевого управления для ручного ввода руления, может быть выполнен таким образом, что когда устройство ввода руления возвращается в нейтральное положение (например, при повторном центрировании рулевого колеса), гидравлический поток не направляется через клапан рулевого управления в поршень двустороннего действия (например, клапаном рулевого управления может быть клапан с закрытым центром). Соответственно, во время автоматического рулевого управления, устройство ввода руления может возвращаться в нейтральное положение, так что рулевое устройство может принимать сигналы гидравлического рулевого управления от переднего клапанного узла, но не от клапана рулевого управления с ручным приводом. Соответственно, рулевое управление передними колесами может автоматически регулироваться передним клапанным узлом (и связанными с ним электронными контроллерами), вместо ручного управления посредством устройства ввода руления.
[0033] В некоторых вариантах осуществления, для того, чтобы управлять рулением задних (или других) колес, во взаимодействии с устройством ввода руления может быть помещен датчик. Датчик может быть выполнен с возможностью определения ручного ввода руления в устройстве ввода руления и с возможностью передачи соответствующего входного сигнала рулевого управления (например, непосредственно, или опосредованно, через контроллер) в задний гидравлический клапанный узел с электронным (или иным) приводом. Таким образом, задний клапанный узел может облегчить рулевое управление задними колесами на основании ручного ввода руления, определяемому датчиком рулевого управления, без необходимости в непосредственном механическом соединении между устройством ввода руления и задним клапанным узлом (и любым связанным с ним рулевым устройством). Например, датчик рулевого управления может быть выполнен с возможностью определения угловой скорости поворота рулевого колеса или степени поворота рулевого колеса (или другого устройства ввода руления) и передачи соответствующего сигнала в контроллер. Затем контроллер может предоставлять в задний клапанный узел управляющую команду, на основании сигнала рулевого управления от датчика. На основании команд рулевого управления, задний клапанный узел тогда может управлять задним рулевым устройством с гидравлическим приводом (например, одним или более дополнительными поршнями двустороннего действия) для того, чтобы автоматически управлять задними колесами.
[0034] В некоторых вариантах осуществления, одно или более задних колес транспортного средства могут находиться в механическом сообщении с одним или более поршнями двустороннего действия (или другими устройствами рулевого управления) таким образом, что приведение в действие поршней регулирует рулевое управление задними колесами. Для того, чтобы управлять подобным транспортным средством, оператор может поворачивать рулевое колесо на конкретную величину (например, конкретное количество градусов) или с конкретной скоростью (например, на конкретное количество градусов в секунду), или иным образом предоставлять ручной ввод руления. Датчик во взаимодействии с рулевым колесом может определять данное приложение ввода руления и передавать в контроллер соответствующий электрический (или другой) сигнал рулевого управления. Контроллер может дешифровывать или иным образом обрабатывать сигнал рулевого управления для того, чтобы предоставлять подходящий сигнал команды в различные клапаны внутри заднего клапанного узла. Соответственно, гидравлический поток через данные клапаны (и через задний клапанный узел в целом) может регулироваться на основании определяемого ручного ввода руления. В свою очередь, поток через задний клапанный узел может управлять приведением в действие поршня двустороннего действия (или другого рулевого устройства) в каждом из задних колес транспортных средств. Таким образом, задними колесами можно автоматически управлять в соответствии с ручным вводом руления на рулевом колесе без необходимости непосредственного механического соединения между устройством ввода руления и задними рулевыми устройствами.
[0035] В некоторых вариантах осуществления, в качестве альтернативы (или дополнительно) автоматически можно управлять передними колесами, при этом скорость вращения передних колес (или другие параметры) регулируется независимо от какого-либо ручного ввода руления на соответствующем устройстве ввода руления. Например, передний клапанный узел (например, который также описан выше) может быть выполнен с возможностью автоматического включения рулевого устройства для передних колес на основании заданной траектории для транспортного средства вместо ручного ввода руления в устройстве ввода руления. Например, заданная траектория (например, прямая линия, проходящая по полю) может определяться независимо от ручного ввода руления (например, на основании заданного уборочного плана для поля). Передний клапанный узел может быть выполнен с возможностью автоматического перемещения поршня двустороннего действия для регулирования скорости лево и правосторонних насосов привода на основании заданной траектории движения для транспортного средства. Соответственно, транспортным средством можно автоматически управлять посредством передних колес на основании заданной траектории движения.
[0036] В некоторых вариантах осуществления, для сравнения текущего положения транспортного средства (или проецированной траектории движения) с заданной траекторией движения по полю (или по другой местности) может использоваться устройство глобальной системы позиционирования («GPS»). Подходящие автоматические управляющие команды (т.е., электрические управляющие сигналы) для переднего клапанного узла могут определяться относительно текущего положения транспортного средства и заданной траектории движения (например, могут определяться контроллером на основании калиброванных параметров, справочной таблицы или других факторов). На основании получения данных управляющих команд передний клапанный узел может автоматически управлять рулением передних колес транспортного средства для того, чтобы заставлять транспортное средство следовать заданной траектории. Например, для того, чтобы сохранять движение транспортного средства вдоль заданной траектории движения (например, которая определена с использованием устройства GPS), контроллер может автоматически регулировать гидравлический поток через различные клапаны внутри переднего клапанного узла для того, чтобы приводить в действие поршень двустороннего действия для рулевого управления передними колесами.
[0037] Задними колесами также можно иногда управлять на основании заданной траектории движения для транспортного средства. Например, когда на основании информации GPS (как описано выше) автоматически управляют передними колесами, для улучшения следования транспортного средства по заданной траектории движения также можно автоматически управлять задними колесами. В некоторых вариантах осуществления, подобное автоматическое управление задними колесами также может осуществляться поршнями двустороннего действия во взаимодействии с различными задними колесами (как также описано выше).
[0038] Среди других преимуществ, система (и способ) рулевого управления, описанные в данной заявке, могут обеспечить возможность работы транспортного средства во множестве режимов рулевого управления, включая ручной режим рулевого управления (или «ручной режим»), ручной режим с содействием рулевому управлению задними колесами (т.е., «режим содействия рулевому управлению задними колесами») и автоматический режим управления (или «автоматический режим»). В ручном режиме, рулевое управление передними колесами может регулироваться оператором через ручной ввод на устройство ввода руления, такое как рулевое колесо. Как отмечалось выше, например, ручной ввод руления на устройство ввода руления может задействовать клапан с ручным управлением с избирательным переносом гидравлической жидкости в какую-либо сторону двустороннего поршня (или с иным приведением в действие другого рулевого устройства) и вызывая посредством этого вращение передних колес с различными скоростями.
[0039] В режиме содействия рулевому управлению задними колесами, управление задними колесами может регулироваться автоматически на основании ручного рулевого управления передними колесами таким образом, что задние колеса могут дополнять ручное рулевое управление передними колесами. (В связи с этим, следует понимать, что транспортное средство может работать одновременно в режимах ручного рулевого управления и содействия рулевому управлению задними колесами). В некоторых вариантах осуществления, рулевое управление передними колесами может непосредственно регулироваться на основании ручного ввода руления, в устройстве ввода руления, а рулевое управление задними колесами может регулироваться автоматическими управляющими командами, которые определяются на основании ручного ввода руления. Например, датчик рулевого управления может определять скорость (или степень) рулевого управления в устройстве ввода руления и предоставлять в контроллер соответствующие сигналы рулевого управления. На основании данных сигналов рулевого управления, контроллер может затем регулировать поток через задний клапанный узел для управления рулением задних колес на основании сигналов из датчика рулевого управления. Задними колесами можно автоматически управлять, чтобы поворачивать заднюю часть транспортного средства в противоположном направление от управляемой вручную передней частью транспортного средства для того, чтобы уменьшать эффективный радиус поворота транспортного средства для данной операции, или можно автоматически управлять иным образом, чтобы должным образом выравнивать транспортные средства с желательной траекторией движения, обозначаемой посредством ручного ввода руления.
[0040] В автоматическом режиме, управление передними колесами и задними колесами может регулироваться автоматически, без приложения к рулевому управлению ручного ввода со стороны оператора. Например, для того, чтобы направлять транспортное средство вдоль заданной траектории движения, контроллер может автоматически регулировать гидравлический поток через передний клапанный узел для автоматического управления рулением передних колес, и тот же самый (или другой) контроллер может автоматически регулировать гидравлический поток через задний клапанный узел для автоматического управления рулением задних колес. В автоматическом режиме управления, заданная траектория движения может использоваться для определения различных управляющих команд. Например, информация GPS может использоваться для идентификации, отклоняется ли транспортное средство (или ожидается ли отклонение) от заданной траектории движения, и соответственно определяются управляющие команды (например, различные управляющие сигналы для соответствующих клапанных узлов).
[0041] Система (и способ) рулевого управления, которые описаны в данной заявке, также могут облегчить относительно легкое адаптирование операторами транспортного средства рулевого управления к специфическим потребностям. Например, когда передний и задний клапанные узлы выполнены с возможностью регулирования, соответственно, рулевого управления передними и задними колесами транспортного средства, оператор может регулировать коэффициент усиления (или другие параметры) для различных регулируемых клапанов внутри каждого клапанного узла для того, чтобы регулировать чувствительность (или агрессивность и так далее) рулевого управления для каждого комплекта колес. Например, оператор может регулировать коэффициент усиления для различных пропорциональных регулирующих клапанов внутри заднего клапанного узла для того, чтобы регулировать агрессивность рулевого управления задними колесами, во время режима содействия рулевому управлению задними колесами, для заданного ручного ввода руления.
[0042] В частности, для систем с прямым механическим управляющим соединением между устройством ввода руления и различными устройствами рулевого управления могут быть невозможны (по меньшей мере в такой же степени) регулировки чувствительности рулевого управления. Кроме того, во множестве вариантов осуществления, описанных в данной заявке, некоторые регулировки оператором переднего и заднего клапанных узлов могут использоваться для ручного режима или режима содействия рулевому управлению задними колесами, но во время работы транспортного средства в автоматическом режиме управления их можно не принимать во внимание. Таким образом, оператор может осуществлять адаптированное рулевое управление для режима содействия рулевому управлению задними колесами и ручного режима, без нарушения заданной конфигурации системы управления для автоматического режима. Например, коэффициент усиления для различных пропорциональных регулирующих клапанов в конкретном клапанном узле может регулироваться оператором для режима содействия рулевому управлению задними колесами для того, чтобы уменьшать (или увеличивать) величину рулевого управления на задних колесах для заданного ручного ввода руления. Когда транспортное средство переходит из режима содействия рулевому управлению задними колесами в автоматический режим управления, тогда значения коэффициентов усиления клапанов могут автоматически повторно устанавливаться на значения по умолчанию (или другие), обеспечивая подходящее автоматическое управление. Также, коэффициент усиления для различных пропорциональных регулирующих клапанов в конкретном клапанном узле может автоматически изменяться на адаптированные настройки (например, на выбранные оператором настройки), когда транспортное средство переходит из автоматического режима управления в режим содействия рулевому управлению задними колесами.
[0043] Раскрытая система (и способ) рулевого управления также могут облегчить, среди прочего, более быстрые и более легкие переходы между различными режимами рулевого управления. В некоторых вариантах осуществления, где между задним клапанным узлом и устройством ввода руления не предусмотрено прямое механическое соединение, может быть возможно относительно быстрое переключение из ручного режима в режим содействия рулевому управлению задними колесами или в автоматический режим. Например, в транспортном средстве, работающем в режиме ручного рулевого управления, режим содействия рулевому управлению задними колесами может включаться (или выключаться) за счет использования (или игнорирования) входного сигнала рулевого управления от датчика рулевого управления, а не за счет необходимого рассоединения (или иного игнорирования) механического соединения. Также, транспортное средство может быть переведено из ручного режима рулевого управления (и режима содействия рулевому управлению задними колесами) в автоматический режим управления за счет переключения с управления передним и задним рулевым устройством на основании ручного ввода руления (и связанных сигналов из датчика рулевого управления), на управление передним и задним клапанными узлами на основании заданной траектории транспортного средства. Когда нет соответствующего механического соединения для разъединения (или игнорирования), данное переключение может осуществляться быстро и автоматически, например, за счет простого изменения стратегии управления, осуществляемого контроллером в переднем и заднем клапанных узлах.
[0044] В частности, вследствие улучшенной чувствительности и управления раскрытой системой (и способом) рулевого управления, может быть возможно безопасно и эффективно задействовать конкретное транспортное средство, в котором используется подобная система (или способ) с существенно повышенными скоростями. Например, улучшенное управление, обеспечиваемое за счет активного управления рулением задних колес, в автоматическом ли режиме или режиме содействия рулевому управлению задними колесами, может обеспечить возможность безопасного и эффективного движения транспортного средства с относительно высокими скоростями без существенного отклонения от заданной траектории движения.
[0045] Следует понимать, что устранение прямого механического соединения между устройством ввода руления и устройством рулевого управления, клапанным узлом рулевого управления или другим устройством или системой может не требовать полного отсутствия механических составных элементов из соответствующих систем или узлов. Например, различные гидравлические регулирующие клапаны могут включать механические составные элементы, такие как поршни, кулисы, трубки и так далее, и в рулевом управлении также могут с пользой содержаться различные другие по меньшей мере частично механические устройства (например, поршни двустороннего действия). С этой точки зрения, данное раскрытие предусматривает устранение механических соединений между устройствами ввода руления и другими составными элементами системы рулевого управления (например, задними рулевыми устройствами) в смысле конфигурирования этих (и связанных) устройств и составных элементов для обмена управляющей информацией посредством электронных, гидравлических или других в первую очередь немеханических средств, а не посредством в первую очередь механических средств, таких как шестерни, рейки, механические соединения и так далее. С этой точки зрения, реечный узел (или аналогичный механический механизм) для передачи информации о рулевом управлении от рулевого колеса в электрогидравлический клапанный узел или гидравлическое рулевое устройство может рассматриваться в качестве предоставления механического соединения между рулевым колесом и клапанным узлом. В отличие от этого, сигнальная линия между датчиком на рулевой колонке и контроллером или клапанным узлом не может обеспечивать механическое соединение между рулевой колонкой и контроллером или клапанным узлом, даже если сигнальная линия, контроллер или клапанный узел содержит механические элементы, такие как контрольные клапаны, механические реле и так далее.
[0046] Далее со ссылкой на ФИГ. 1, изображено иллюстративное сельскохозяйственное транспортное средство 10. Следует понимать, что конфигурация транспортного средства 10, представленная на ФИГ. 1, предназначена только для примера и что в соответствии с данным раскрытием могут быть возможны другие конфигурации. Как изображено на ФИГ. 1, транспортным средством 10 может быть сельскохозяйственный валкоукладчик с жаткой 12 для скашивания и сбора сельскохозяйственного материала (например, полотенной платформой). Передние колеса 14 могут быть зафиксированы с ориентацией с обращением вперед (т.е., могут не поворачиваться относительно транспортного средства 10) и могут независимо приводиться в действие посредством соответствующих гидростатических машин для направления передней части транспортного средства 10. Например, гидравлический контур 16 управления приводом для каждого из передних колес 14, соответственно, может включать две различные гидравлические (или другие) машины, такие как гидравлический насос (не показано на ФИГ. 1), приводимый в действие двигателем 36 транспортного средства 10, и гидравлический двигатель (не показано на ФИГ. 1), приводимый в действие гидравлическим насосом. Соответственно могут использоваться пары двигателей-насосов соответствующего контура 16 управления приводом, соответственно для приведения в действие левых и правых колес 14 с независимыми (и потенциально различными) скоростями вращения. Таким образом, хотя передние колеса 14 не могут поворачиваться относительно транспортного средства 10, передними колесами 14 можно управлять (и можно направлять транспортное средство 10) на основании разницы в скоростях между левым передним колесом 14 и правым передним колесом 14 (например, которыми управляют посредством левого и правого гидравлического контура 16 управления приводом, соответственно). Как обсуждается более подробно ниже, для управления относительными скоростями гидравлических двигателей и посредством этого для управления рулением передних колес 14 может использоваться переднее рулевое устройство с различными конфигурациями (не показано на ФИГ. 1).
[0047] Задние колеса 18 также могут быть управляемыми колесами, хотя задние колеса 18 могут быть выполнены по другому, чем передние колеса 14. Например, задние колеса 18 могут быть установлены, соответственно, на поворотных шкворнях 20, которые могут обеспечивать возможность поворота колес 18 независимо друг от друга и от фиксированной задней колесной опоры 22. Следует понимать, что могут быть возможны различные другие конфигурации задних колес 18 и что архитектуры управления, предусматриваемые данным раскрытием, также могут использоваться с несамоустанавливающимися задними колесами или другими конфигурациями.
[0048] В изображенной конфигурации, если задние колеса 18 и поворотные шкворни 20 имеют возможность свободно поворачиваться, они могут в общем следовать за поворотам транспортного средства 10, когда им управляют иным образом (например, когда двигатели обеспечивают различные скорости для каждого из передних колес 14), но без обеспечения задними колесами 18 какого-либо активного рулевого управления для транспортного средства 10. Например, когда передние колеса 14 в режиме ручного рулевого управления поворачивают транспортное средство 10 влево, поворот (и продолжающееся движение вперед) транспортного средства 10 может вызывать поворот влево задних поворотных шкворней 20 и посредством этого поворот задних колес 18, следуя повороту транспортного средства 10. Однако, в некоторых случаях, если задними колесами 18 активно не управляют, задние колеса 18 могут стремиться к смещению от траектории движения транспортного средства 10. Например, вследствие ударов о землю или других событий, колеса 18 могут иногда поворачиваться на поворотных шкворнях 20 таким образом, что колеса 18 волочатся, а не катятся по земле, или таким образом, что колеса 18 имеют тенденцию направлять заднюю часть транспортного средства 10 в сторону от намеченной траектории движения транспортного средства 10.
[0049] Транспортное средство 10 также может содержать кабину 24, из которой оператор может управлять работой транспортного средства 10. В кабине 24 может содержаться устройство ввода руления, такое как рулевое колесо 26, так что оператор может управлять рулением транспортного средства 10 (в некоторых режимах рулевого управления), обеспечивая ручной ввод руления. Следует понимать, что дополнительно (или в качестве альтернативы) могут использоваться другие устройства ввода руления (например, рычаги, джойстики, сенсорные устройства и так далее). Также внутри кабины могут предоставляться различные другие устройства ввода. Например, устройство управления гидравлической системой (например, рычаг 32 гидроуправления) может предоставляться для переключения транспортного средства между различными рабочими режимами (например, между активным рабочим режимом, в котором действуют различные гидравлические системы, стояночным режимом, в котором транспортное средство находится в состоянии под напряжением, но различные гидравлические системы могут не работать и так далее).
[0050] Также со ссылкой на ФИГ. 2, иллюстративная конфигурация транспортного средства 10 представлена в виде иллюстративного транспортного средства 10a. Для того, чтобы управлять рулением передних или задних колес 14 или 18 транспортного средства 10a, в большой управляющий контур (который изображен на различных фигурах) клапанный узел 40 может быть интегрирован таким образом, что клапанный узел 40 находится во взаимодействии с различными другими составными элементами транспортного средства 10. Клапанный узел 40 может находиться в гидравлическом сообщении с различными составными элементами, такими как задние рулевые устройства 42, и может находиться в электронном сообщении с различными составными элементами, такими как электронный контроллер 58 (или другой блок управления). Клапанный узел 40 также может находиться во взаимодействии (например, посредством механического соединения) с составными элементами переднего гидравлического контура 16 управления приводом, такими как гидравлические насосы 16a переднего привода (или связанные устройства управления, такие как регулирующие клапаны для насосов 16a и так далее). Таким образом, например, клапанный узел 40 может использоваться для регулирования числа оборотов насосов 16a привода (например, за счет механического регулирования насосов 16a) для того, чтобы управлять, соответственно, числом оборотов гидравлических двигателей 16b переднего привода. Соответственно, вследствие того, что двигатели 16b переднего привода можно приводить в действие независимо друг относительно друга, клапанный узел 40 может использоваться для управления рулением передних колес 14. Клапанный узел 40 также может использоваться для управления задними рулевыми устройствами 42 (например, за счет гидравлического приведения в действие устройств 42) для того, чтобы управлять рулением задних колес 18.
[0051] В некоторых вариантах осуществления, клапанный узел 40 может содержать один или более гидравлических контуров, включая различные гидравлические клапаны (например, клапаны с электронным управлением) и различные гидравлические и электрические линии (см., например, ФИГ. 5). Клапанный узел 40 может получать давление подпитки и рабочее давление от различных насосов (например, насосов 44 и 46) и может нагнетать давление в один или более резервуаров (не показано на ФИГ. 2). В некоторых вариантах осуществления, как обсуждается более подробно ниже, насос 44 может быть выполнен в виде нагнетательного насоса низкого давления, а насос 46 может быть выполнен в виде насоса рулевого управления высокого давления.
[0052] Клапанный узел 40 может получать управляющие сигналы (например, гидравлические или электронные сигналы) из множества источников, включая источники, отдельно обсуждающиеся в данной заявке, и различные другие. В некоторых вариантах осуществления, контроллер 58 может находиться в электрическом (или другом) сообщении с различными клапанами (или другими составными элементами) клапанного узла 40 для того, чтобы управлять работой данных клапанов (или других составных элементов). Например, различные клапаны, содержащиеся в клапанном узле 40, могут быть выполнены с возможностью приведения в действие на основании электронных управляющих команд (например, различных электронных сигналов) от контроллера 58 (или другого устройства). Контроллер 58 также может находиться в электрическом (или другом) сообщении с датчиком 30 рулевого управления (соединение с контроллером 58 не показано), различными управляющими контурами, различными другими электрогидравлическими клапанными узлами (как показано, например, на фигурах 3 и 4) и так далее. Контроллер 58 может быть выполнен в виде вычислительного устройства с одним или более процессорами и архитектурами памяти, в виде реализованной аппаратно вычислительной схемы (или схем), в виде гидравлического или электрогидравлического устройства управления и так далее.
[0053] Следует понимать, что различные линии управления (и другие), изображенные на различных фигурах, могут рассматриваться как отображение, в различных конфигурациях, либо одной линии гидросистемы (или другой сигнальной линии), либо множества подобных линий. В связи с этим, если для конкретного примера или осуществления специально не указано, следует понимать, что изображенные линии могут использоваться для переноса любого множества сигналов (например, гидравлических и электрических сигналов), которое может быть целесообразным. В связи с этим, например, конкретная линия управления, изображенная на различных фигурах, в некоторых вариантах осуществления, может отображать две или более линии управления (например, электрическую сигнальную линию и линию гидравлического потока). Кроме того, следует понимать, что линии (или другие передающие сигналы устройства) могут проходить между различными изображенными (и спрятанными) составными элементами и узлами и могут соединяться с ними посредством множества различных способов. В некоторых вариантах осуществления, вместо проводных соединений может использоваться беспроводная передача электрических управляющих сигналов.
[0054] Для того, чтобы управлять рулением транспортного средства 10a на основании ручного ввода на рулевое колесо 26, различные гидравлические, электрические или другие составные элементы могут быть выполнены с возможностью выдачи в клапанный узел 40 (и различные другие устройства) сигналов (например, гидравлических или электрических сигналов). Например, в некоторых вариантах осуществления, ручной клапан 28 рулевого управления может находиться во взаимодействии с рулевым колесом 26 таким образом, что оператор, поворачивая колесо 26 (т.е., предоставляя ручной ввод руления), заставляет клапан 28 предоставлять соответствующий поток гидравлической жидкости в клапанный узел 40 (например, в рулевое устройство, содержащееся в клапанном узле 40). Таким образом, ручной ввод на рулевое колесо 26 может осуществляться в виде сигналов гидравлического рулевого управления для управления колесами транспортного средства 10a. В некоторых вариантах осуществления, клапан 28 в качестве альтернативы (или дополнительно) может предоставлять гидравлический поток в другие устройства или узлы (например, рулевое устройство, не содержащееся в клапанном узле 40, как изображено в варианте осуществления ФИГ. 4).
[0055] В некоторых вариантах осуществления, датчик 30 рулевого управления (например, электронный или электрогидравлический датчик) также может определять ручной ввод руления, например, поворот колеса 26 (например, посредством определения скорости поворота колеса 26 в конкретном направлении). Затем датчик 30 рулевого управления может предоставлять соответствующий входной сигнал рулевого управления (например, электронный или гидравлический сигнал) в клапанный узел 40, контроллер 58 (сигнальная линия не показана) или в различные другие устройства для облегчения рулевого управления на основании ручного ввода руления. В некоторых вариантах осуществления, датчиком 30 может быть оптический датчик, который выявляет вращение рулевой колонки, связанной с рулевым колесом 26, и предоставляет электрический сигнал, отображающий вращение рулевой колонки (и посредством этого, рулевого колеса 26) в контроллер 58, или в один или более регулирующих клапанов (или другие устройства или составные элементы) внутри электрогидравлического клапанного узла 40. В некоторых вариантах осуществления, могут использоваться другие типы датчиков, включая датчики на эффекте Холла или другие.
[0056] Как отмечалось выше, иногда может быть полезно управлять рулением транспортного средства 10a за счет активного рулевого управления задними колесами 18 (например, в режиме содействия рулевому управлению задними колесами или автоматическом режиме управления), а также передними колесами 14. В связи с этим, транспортное средство 10a может содержать различные задние рулевые устройства, такие как задние рулевые устройства 42 с гидравлическим (или иным) приводом, которые могут использоваться для избирательного управления ориентацией колес 18 (или поворотных шкворней 20). Рулевые устройства 42 могут регулироваться на основании гидравлических сигналов из клапанного узла 40, которые, в свою очередь, могут определяться на основании различных факторов (например, ручного ввода руления, как обсуждалось выше, или заданной траектории движения, как обсуждается ниже). В некоторых вариантах осуществления, задние рулевые устройства 42 могут содержаться в виде части клапанного узла 40, а не в виде отдельных составных элементов транспортного средства 10a.
[0057] В некоторых вариантах осуществления, можно рассматривать рулевые устройства 42, содержащиеся в двухканальном гидравлическом контуре (или системе), так что избирательно направляемый гидравлический поток по конкретной траектории двухканального контура может приводить к повороту одного или обоих задних колес 18 в конкретном направлении. Например, каждое заднее рулевое устройство 42 может содержать гидравлический поршень двустороннего действия (не показанный на ФИГ. 2), который соединен с поворотным рычагом. В свою очередь, поворотный рычаг может быть соединен с соответствующим поворотным шкворнем 20 для соответствующего заднего колеса 18. Таким образом, за счет приведения в действие поршней двустороннего действия, задние колеса 18 могут избирательно (и независимо) поворачиваться в каждом направлении на поворотных шкворнях 20 для того, чтобы (независимо) управлять рулением задних колес 18.
[0058] В некоторых вариантах осуществления, для приведения в действие только одного (или обоих) задних рулевых устройств 42 (и связанных с ними клапанных узлов) может быть предоставлен отдельный насос (например, насос 46). В некоторых вариантах осуществления, задние рулевые устройства 42 (или различные другие устройства и системы, описанные в данной заявке) могут иметь общий насос (например, насос 46, насос 44 или другой насос (не показанный на ФИГ. 2) с одним или более другими устройствами или системами. В некоторых вариантах осуществления, насосом 46 может быть насос высокого давления (например, насос «рулевого управления» высокого давления), который может быть выполнен с возможностью подачи гидравлической жидкости для приведения в действие заднего рулевого устройства 42, а также различных других устройств. В некоторых вариантах осуществления, насосом 44 может быть нагнетательный насос низкого давления, который может быть выполнен главным образом для предоставления в различные гидравлические контуры или устройства давления подпитки.
[0059] Также как отмечалось выше, следует понимать, что могут быть возможны различные альтернативные конфигурации. Например, клапанный узел 40 может непосредственно содержать такие составные элементы, как гидравлические двигатели 16b, насос 44 (или различные другие насосы, такие как насос 46), контроллер 58 и так далее, или может взаимодействовать с подобными составными элементами через различные сигнальные линии, внешние для клапанного узла 40. Аналогичным образом, как изображено на последующих фигурах, клапанный узел 40 может быть заменен (или разделен на) множество клапанных узлов или других устройств.
[0060] В некоторых вариантах осуществления, клапанный узел 40 (и связанные с ним гидравлические контуры) не может находиться в гидравлическом сообщении с гидравлическим контуром 16 управления приводом (кроме потенциально слива в общий резервуар). Например, вместо гидравлических соединений между клапанным узлом 40 и контурами 16 управления приводом, между рулевым устройством клапанного узла 40 и насосами 16a могут предоставляться механические соединения 34. В связи с этим, скоростью насосов 16a можно механически управлять на основании сигналов гидравлического рулевого управления из клапанного узла 40, сигналов гидравлического рулевого управления из ручного клапана 28 рулевого управления или других управляющих сигналов. В отличие от этого, между клапанным узлом 40 и задними рулевыми устройствами 42 аналогичное механическое соединение может не предоставляться.
[0061] Когда транспортное средство 10a работает в режиме ручного рулевого управления, но не в режиме содействия рулевому управлению задними колесами, передними колесами 14 можно управлять на основании гидравлического потока через ручной клапан 28 рулевого управления. Например, ручной ввод на рулевое колесо 26 может регулировать гидравлический поток через ручной клапан 28 рулевого управления. Данный гидравлический поток, в свою очередь, по мере прохождения через различные промежуточные устройства, может заставлять два насоса 16a приводить в действие два передних колеса 14 с различными скоростями. Например, рулевое устройство (не показано на ФИГ. 2), содержащееся в клапанном узле 40, может механически (или иным образом) регулировать скорость насосов 16a на основании гидравлических сигналов из ручного клапана 28 рулевого управления для того, чтобы приводить в движение, соответственно, передние колеса 14 с соответствующими скоростями. Однако, в режиме ручного рулевого управления клапанный узел 40 не может активно управлять рулением задних колес 18 посредством задних рулевых устройств 42. Например, гидравлический поток не может предоставляться из клапанного узла 40 в задние рулевые устройства 42, и задние поворотные шкворни 20 могут соответственно поворачиваться относительно свободно относительно задней опоры 22.
[0062] В режиме содействия рулевому управлению задними колесами, передними колесами можно также управлять на основании гидравлического потока через ручной клапан 28 рулевого управления, как обсуждалось выше. Однако, задними колесами 18 можно активно (и автоматически) управлять на основании ручного ввода на рулевое колесо 26. Например, датчик 30 рулевого управления может определять угловую скорость поворота рулевого колеса (или степень поворота рулевого колеса) для ручного ввода руления, получаемого на рулевом колесе 26, и может предоставлять в контроллер 58 соответствующий электронный сигнал. Тогда контроллер 58 может предоставлять в клапанный узел 40 соответствующую управляющую команду, и посредством этого приводить в действие задние рулевые устройства 42 для того, чтобы гидравлически управлять рулением задних колес 18. Как отмечалось выше, режим содействия рулевому управлению задними колесами может осуществляться одновременно с ручным режимом рулевого управления.
[0063] В автоматическом режиме управления, можно продолжать управление задними колесами 18 посредством задних рулевых устройств 42 на основании управляющих команд, предоставляемых из контроллера 58 в клапанный узел 40. Однако, в автоматическом режиме управления подобные управляющие команды могут быть основаны не на ручном вводе на рулевое колесо 26. Вместо этого, команды управления задними колесами для автоматического режима управления могут определяться автоматически на основании заданной траектории движения для транспортного средства 10a. Аналогичным образом, в автоматическом режиме управления, вместо ручного ввода на рулевое колесо 26, передними колесами 14 также можно управлять на основании управляющих команд, предоставляемых из контроллера 58 в клапанный узел 40. Например, для того, чтобы приводить в движение, соответственно, передние колеса 14 с соответствующими скоростями, рулевое устройство (не показано на ФИГ. 2), содержащееся в клапанном узле 40, может регулировать скорость насосов 16a на основании управляющих команд, предоставляемых из контроллера 58 в клапанный узел 40. В некоторых вариантах осуществления, определение ручного ввода на рулевое колесо 26 (например, определение датчиком 30 рулевого управления) может вызывать выход транспортного средства 10a из автоматического режима управления.
[0064] В некоторых вариантах осуществления, управляющие команды для автоматического режима управления (или других режимов) могут определяться на основании заданной траектории движения для транспортного средства 10a. Например, заданная траектория для транспортного средства 10a (например, траектория по полю «из A в B») может определяться различными известными способами. Во время работы, текущее положение транспортного средства 10a тогда может определяться на основании информации о местоположении из устройства 48 GPS (или другой системы определения местоположения). На основании различных дополнительных факторов, таких как текущая скорость или ориентация колес 14 или 18 или текущая скорость транспортного средства 10a относительно земли (которая определяется, например, различными датчиками числа оборотов колес (не показано)), могут определяться целесообразные операции рулевого управления для поддержания желательной траектории движения (например, заданной траектории «A-B») и соответствующие управляющие команды, предоставляемые контроллером 58 в клапанный узел 40 (или другие устройства).
[0065] Также со ссылкой на ФИГ. 3, в аналогичной иллюстративной конфигурации, обозначенной в данном случае, как транспортное средство 10b, функции клапанного узла 40 (см. ФИГ. 2) могут быть разделены между двумя или более отдельными (но потенциально взаимосвязанными) клапанными узлами, такими как электрогидравлические клапанные узлы 40a и 40b. В подобной конфигурации, различные функции могут регулироваться одним или обоими отдельными клапанными узлами 40a и 40b. Например, клапанный узел 40b может быть выполнен с возможностью общего регулирования автоматического управления задними колесами 18 (например, в режимах содействия рулевому управлению задними колесами и автоматического управления), в то время как клапанный узел 40a может быть выполнен с возможностью общего регулирования автоматического управления передними колесами 14 (например, в автоматическом режиме управления). В некоторых вариантах осуществления, в клапанном узле 40a также может содержаться переднее рулевое устройство (не показано на ФИГ. 3), так что клапанный узел 40a в режиме ручного рулевого управления также может вносить вклад в рулевое управление передними колесами 14.
[0066] Один или оба клапанных узла 40a и 40b могут быть выполнены с возможностью приема гидравлического потока из одного или обоих насосов 44 и 46. Тем не менее, в некоторых вариантах осуществления, насосы 44 и 46 могут работать в отдельных гидравлических контурах (например, не могут находиться в гидравлическом сообщении, даже если оба насоса 44 и 46 предоставляют находящийся под давлением поток в один или оба клапанных узла 40a и 40b). Например, насос 44 может быть выполнен в виде нагнетательного насоса, предоставляющего управляющее давление в первую часть клапанного узла 40b (например, чтобы обеспечить работу клапанного узла 40b), а также различные другие устройства или системы (например, для переключения числа оборотов двигателя или высвобождения стояночного тормоза, для предоставления давления подпитки в насосы 16a привода или насосы привода отбора мощности (не показано) и так далее). В отличие от этого, насосом 46 может быть насос высокого давления, предоставляющий рабочее давление во вторую часть клапанного узла 40b, которая может быть гидравлически изолирована от первой части.
[0067] В изображенной конфигурации на ФИГ. 3, гидравлические (или электрические) сигналы рулевого управления могут передаваться от ручного клапана 28 рулевого управления (или датчика 30 рулевого управления) в клапанный узел 40a, или в различные другие устройства (например, в контроллер 58), на основании ручного ввода на рулевое колесо 26. Также в контроллер 58, а также в различные другие устройства могут передаваться различные другие сигналы рулевого управления (например, электрический сигнал от датчика 30 рулевого управления, отображающий соответствующий ручной ввод на рулевое колесо 26). Как и в иллюстративной конфигурации, изображенной на ФИГ. 2, в конфигурации ФИГ. 3, клапанные узлы 40a и 40b также могут принимать (и предоставлять) электрическую или гидравлическую информацию от (и в) различные другие составные элементы или системы транспортного средства 10b, включая элементы или системы, не изображенные отдельно на фигурах.
[0068] Как и в конфигурации ФИГ. 2, когда транспортное средство 10b работает в режиме ручного рулевого управления (но также не в режиме содействия рулевому управлению задними колесами), передними колесами 14 можно управлять на основании гидравлического потока через ручной клапан 28 рулевого управления, и нельзя активно управлять рулением задних колес 18. Например, ручной ввод на рулевое колесо 26 может регулировать гидравлический поток через ручной клапан 28 рулевого управления. Данный гидравлический поток, посредством различных промежуточных устройств, затем может заставлять два насоса 16a приводить в действие два передних колеса 14 с различными скоростями. Например, рулевое устройство (не показано на ФИГ. 3), содержащееся в клапанном узле 40a, может механически (или иным образом) регулировать скорость насосов 16a на основании гидравлических сигналов из ручного клапана 28 рулевого управления для того, чтобы приводить в движение, соответственно, передние колеса 14 с соответствующими скоростями.
[0069] В режиме содействия рулевому управлению задними колесами, передними колесами можно также управлять на основании гидравлического потока через ручной клапан 28 рулевого управления, а задними колесами 18 можно автоматически управлять на основании электрических сигналов из датчика 30 рулевого управления. Например, датчик 30 рулевого управления может определять угловую скорость поворота рулевого колеса (или степень поворота рулевого колеса) для ручного ввода руления, получаемого на рулевом колесе 26, и может предоставлять в контроллер 58 соответствующий электрический сигнал. Затем контроллер 58 может предоставлять в клапанный узел 40b соответствующую управляющую команду и посредством этого приводить в действие задние рулевые устройства 42 для того, чтобы гидравлически управлять рулением задних колес 18.
[0070] В автоматическом режиме управления, задними колесами 18 можно аналогичным образом управлять посредством задних рулевых устройств 42 на основании управляющих команд, предоставляемых из контроллера 58 в клапанный узел 40b. Однако, в автоматическом режиме управления, подобные управляющие команды могут быть основаны на заданной траектории движения (например, заданной траектории A-B), а не на ручном вводе на рулевое колесо 26. В самом деле, в некоторых вариантах осуществления, определение ручного ввода на рулевое колесо 26 (например, определение датчиком 30 рулевого управления) может вызвать выход транспортного средства 10b из автоматического режима управления.
[0071] Когда транспортное средство 10b работает в автоматическом режиме управления, передними колесами 14 также можно управлять на основании управляющих команд, предоставляемых из контроллера 58 в клапанный узел 40a, вместо ручного ввода на рулевое колесо 26. Например, рулевое устройство (не показано на ФИГ. 3), содержащееся в клапанном узле 40a, может регулировать скорость насосов 16a на основании управляющих команд, предоставляемых из контроллера 58 в клапанный узел 40a, для того, чтобы приводить в движение, соответственно, передние колеса 14 с соответствующими скоростями.
[0072] Контроллер 58 может регулировать клапанные узлы 40a и 40b (или другие устройства или узлы) различными способами. Что касается, например, клапанного узла 40a, управляющей командой от контроллера 58 может быть токовый сигнал соответствующей интенсивности, который может предоставляться в пропорциональный клапан (или клапаны) внутри узла 40a (см., например, ФИГ. 5). Это может приводить к конкретному потоку гидравлической жидкости из клапанного узла 40a в соответствующее рулевое устройство таким образом, что передние колеса 14 приводятся в действие с соответствующими (например, различными) скоростями. Аналогичным образом, управляющей командой из контроллера 58 в клапанный узел 40b может быть другой токовый сигнал соответствующей интенсивности, который может предоставляться в другой пропорциональный клапан (или клапаны) внутри узла 40b (см., например, ФИГ. 5). Это может приводить к конкретному потоку гидравлической жидкости из клапанного узла 40b в задние рулевые устройства 42 таким образом, что поворотные шкворни 20 (и посредством этого, задние колеса 18) поворачиваются на соответствующую величину.
[0073] Также со ссылкой на ФИГ. 4, в некоторых вариантах осуществления, еще одно иллюстративное транспортное средство 10c может содержать переднее гидравлическое рулевое устройство 52 для управления рулением передних колес 14, при этом рулевое устройство 52 расположено отдельно от клапанного узла 40a. Рулевое устройство 52 может принимать множество форм, может принимать электрический или гидравлический входной сигнал из клапана 28 рулевого управления, клапанного узла 40a или других устройств и может, в некоторых вариантах осуществления, содержаться в одном или обоих клапанных узлах 40a и 40b, вместо выполнения в виде отдельного составного элемента или устройства (например, как изображено на фигурах 2 и 3).
[0074] Также как отмечалось выше, один или оба клапанных узла 40a и 40b могут быть выполнены с возможностью приема гидравлического потока из одного или обоих насосов 44 и 46. В некоторых вариантах осуществления, насосы 44 и 46 тем не менее могут работать в раздельных гидравлических контурах (например, не могут находиться в гидравлическом сообщении, даже если оба насоса 44 и 46 предоставляют находящийся под давлением поток в один или оба клапанных узла 40a и 40b). Например, насос 44 может быть выполнен в виде нагнетательного насоса, предоставляющего управляющее давление в первую часть клапанного узла 40b (например, чтобы обеспечить работу клапанного узла 40b), тогда как насосом 46 может быть насос высокого давления, предоставляющий рабочее давление во вторую часть клапанного узла 40b, которая может быть гидравлически изолирована от первой части.
[0075] В некоторых вариантах осуществления, включая изображенный на ФИГ. 4, рулевое управление передними колесами может осуществляться посредством двухканальной гидравлической системы, внутри которой содержится переднее рулевое устройство 52. Например, рулевое устройство 52 может содержать поршень 52a двустороннего действия, расположенный внутри цилиндра. Гидравлическая жидкость может проходить по одной из двух траекторий для нагнетания давления, соответственно, в одной из сторон поршня 52a и перемещения посредством этого поршня 52a внутри цилиндра. В зависимости от относительного положения поршня 52a, поршень 52a может управлять насосами переднего привода 16a для того, чтобы заставлять соответствующие приводные двигатели 16b приводить в действие, соответственно, передние колеса 14 с соответствующими скоростями. Например, посредством механических соединений 34a, конкретное положение поршня 52a внутри цилиндра может помещать соответствующие насосы 16a в конкретные рабочие состояния и, соответственно, заставлять соответствующие двигатели 16b вращаться с конкретными скоростями.
[0076] Как изображено, рулевое устройство 52 может быть выполнено с возможностью приема гидравлических (или других) сигналов из ручного клапана 28 рулевого управления, через гидравлическую линию 54, а также ввода руления из клапанного узла 40a через гидравлическую линию 56. Соответственно, в режиме ручного рулевого управления (с содействием рулевому управлению задними колесами или без оного), ручной ввод на рулевое колесо 26 может заставлять ручной клапан 28 рулевого управления переносить больше гидравлической жидкости по одному пути двухканальной гидравлической системы, чем по другому, нагнетая посредством этого давление в конкретной стороне поршня 52a и передвигая поршень 52a внутри цилиндра рулевого устройства 52. В свою очередь, это может механически (или иным образом) заставлять гидравлические двигатели 16b вращаться с конкретными скоростями и посредством этого направлять передние колеса 14 в конкретном направлении.
[0077] В автоматическом режиме управления, контроллер 58 может предоставлять в клапанный узел 40a управляющие команды (например, на основании заданной траектории движения, информации о положении из устройства 48 GPS и других факторов) для того, чтобы заставлять клапанный узел 40a направлять больше гидравлической жидкости по одному пути двухканальной гидравлической системы, нагнетая посредством этого давление в конкретной стороне поршня 52a. Опять же, это может перемещать поршень 52a внутри цилиндра рулевого устройства 42 для того, чтобы заставлять гидравлические двигатели 16b вращаться с конкретными скоростями и посредством этого направлять передние колеса 14 в конкретном направлении. В автоматическом режиме управления, поток не может переноситься через ручной клапан 28 рулевого управления, так что рулевое управление передними колесами регулируется контроллером 58, но не ручным вводом руления.
[0078] В частности, использование систем рулевого управления, как описано в данной заявке (например, систем, которыми оборудуют устройство ручного ввода руления, такое как рулевое колесо 26 с клапаном рулевого управления с ручным управлением и датчиком рулевого управления во взаимодействии с гидравлическим клапанным узлом 40, контроллером 58 и так далее), может обеспечить возможность управления рулением различных изображенных транспортных средств 10, 10a, 10b и 10c без необходимости в непосредственном механическом соединении (например, реечном устройстве, рычажном механизме или другом механическом узле) между устройством ввода руления (например, рулевым колесом 26) и некоторыми другими устройствами. Соответственно, транспортное средство 10 (и другое) может легко переходить между различными режимами рулевого управления. Например, для режима содействия рулевому управлению задними колесами, ручной ввод на рулевое колесо 26 может преобразовываться датчиком 30 рулевого управления в электронный сигнал, а не ретранслироваться в задний клапанный узел 40b и задние рулевые устройства 42 непосредственно в виде механического (или гидравлического) сигнала. В связи с этим, за счет использования (или не использования) сигнала от датчика 30 рулевого управления транспортное средство 10c может легко переходить в режим содействия рулевому управлению задними колесами (или автоматический режим управления) и из него.
[0079] Для удобства, иллюстративные варианты выполнения различных режимов рулевого управления ниже будут описаны относительно конфигурации транспортного средства 10c, которое изображено на ФИГ. 4. Однако, следует понимать, что аналогичные принципы могут быть применимы в отношении конфигураций транспортного средства 10a на ФИГ. 2 и транспортного средства 10b на ФИГ. 3, а также различных других конфигураций.
[0080] Также как отмечалось выше, в режиме ручного рулевого управления для транспортного средства 10c, передними колесами 14 можно управлять на основании ручного ввода руления, обеспечиваемого оператором на рулевом колесе 26, причем данный ввод (или получаемый из него сигнал) может направляться в устройство 52 рулевого управления для того, чтобы управлять рулением передних колес 14. В некоторых вариантах осуществления, которые также описаны выше, данное управление может осуществляться посредством двухканальной гидравлической системы, содержащей поршень 52a двустороннего действия. Например, оператор может поворачивать рулевое колесо 26 на некоторую величину (или с некоторой угловой скоростью поворота рулевого колеса), или может иным образом предоставлять ручной ввод руления, для того, чтобы обозначить требуемую операцию рулевого управления. Данный поворот рулевого колеса 26 может заставлять ручной клапан 28 рулевого управления избирательно переносить гидравлический поток из насоса 44 для того, чтобы управлять шарнирным сочленением поршня 52a рулевого управления внутри рулевого устройства 52. Например, на основании степени (или угловой скорости) поворота рулевого колеса 26, ручной клапан 28 рулевого управления может направлять конкретные части потока из насоса 44 в какую-либо сторону поршня 52a. Соответственно, поршень 52a может перемещаться внутри цилиндра рулевого устройства 42, заставляя гидравлические двигатели 16b вращать колеса 14 с разными скоростями, и посредством этого направлять транспортное средство 10c в направлении, обозначаемом посредством ручного ввода руления. В нейтральной ориентации (например, в средней или «центрированной» ориентации вдоль траектории движения), поршень 52a может сообщать нулевое состояние поворота машины таким образом, что приведение в движение передних колес 14 стремится приводить в действие транспортное средство 10c по существу вперед или назад (например, прямо вперед или назад). Подобная нейтральная ориентация также может упоминаться, как «повторное центрирование» или ориентация «нулевого управления».
[0081] В некоторых вариантах осуществления, когда транспортное средство 10c работает в режиме ручного рулевого управления, приведение в действие клапанного узла 40a, чтобы активно управлять рулением передних колес 14, может помешать управлению рулением передних колес на основании ручного ввода на рулевое колесо 26. Соответственно, когда транспортное средство 10c задействовано в режиме ручного рулевого управления, контроллер 58 может отключать клапанный узел 40a (или его часть) в отношении рулевого управления передними колесами 14 и посредством этого предотвращать управление клапанным узлом 40a рулевого устройства 52 (или иное управление рулением передних колес 14). Например, в некоторых вариантах осуществления, контроллер 58 может определять, что оператор пытается управлять транспортным средством 10c вручную на основании определения датчиком 30 рулевого управления ручного ввод на рулевое колесо 26. Затем контроллер 58 может активировать блокировочный клапан (см., например, ФИГ. 5) или другое устройство, связанное с клапанным узлом 40a, для того, чтобы предотвращать приведение в действие поршня 52a клапанным узлом 40a. Таким образом, в режиме ручного рулевого управления, управление рулением передних колес 14 может в первую очередь зависеть от ручного ввода на рулевое колесо 26 (например, вместо автоматических управляющих команд из контроллера 58 в клапанный узел 40a).
[0082] Следует понимать, что также могут быть возможны другие варианты исполнения ручного режима рулевого управления. Например, в некоторых вариантах осуществления, датчик 30 может определять угловую скорость поворота рулевого колеса 26 (т.е., на основании ручного ввода на рулевое колесо 26) и может предоставлять соответствующий электронный (или другой) сигнал для управления рулением передних колес 14 (непосредственно или опосредованно). Например, контроллер 58 может быть выполнен с возможностью регулирования рулевого устройства 42 посредством клапанного узла 40a на основании угловой скорости поворота рулевого колеса, определяемой датчиком 30 (т.е., на основании ручного ввода руления). В качестве альтернативы (или дополнительно), контроллер 58 может быть выполнен с возможностью непосредственного управления скоростями насосов 16a на основании подобного сигнала от датчика 30. Например, контроллер 58 может электронным образом управлять скоростью насосов 16a на основании угловой скорости поворота рулевого колеса, определяемой датчиком 30 рулевого управления. Аналогичным образом, в некоторых вариантах осуществления, датчик 30 может выдавать управляющий сигнал непосредственно в насосы, приводящие в действие гидравлические двигатели 16b, или в различные другие устройства, на основании ручного ввода на рулевое колесо 26.
[0083] В некоторых вариантах осуществления, несмотря на то, что транспортное средство 10c работает в режиме ручного рулевого управления (в отношении передних колес 14), задними колесами 18 можно управлять автоматически. Например, в режиме содействия рулевому управлению задними колесами, который может осуществляться одновременно с ручным режимом рулевого управления, рулевое управление задними колесами 18 может регулироваться автоматически на основании ручного ввода на рулевое колесо 26 (или другом устройстве ввода руления). Однако, можно не предоставлять непосредственное механическое соединение между рулевым колесом 26 и задними рулевыми устройствами 42. Например, датчик 30 рулевого управления (или другое устройство) может определять скорость (или степень) поворота рулевого колеса 26 на основании ручного ввода руления, и может передавать в контроллер 58 сигналы, отображающие данную скорость (или степень). Затем контроллер 58 может передавать соответствующие управляющие команды в клапанный узел 40b для того, чтобы управлять рулением задних колес. В некоторых вариантах осуществления, клапанный узел 40b может использоваться для управления рулением задних колес в режиме содействия рулевому управлению задними колесами, даже если клапанный узел 40a был отключен от управления рулением передних колес 14 (например, как описано выше).
[0084] В некоторых вариантах осуществления, также как отмечалось выше, задние рулевые устройства 42 могут использоваться для управления задними колесами 18 в режиме содействия рулевому управлению задними колесами. Например, на основании управляющих команд из контроллера 58, клапанный узел 40b может избирательно направлять поток гидравлической жидкости из насоса 46 (или другого насоса) в каждое из задних рулевых устройств 42 для того, чтобы управлять рулением каждого из задних колес 18, соответственно. В некоторых вариантах осуществления, поток одинаковой величины может направляться в каждое из левого и правого рулевых устройств 42 для того, чтобы осуществлять приблизительно одинаковое рулевое управление каждого из задних колес 18. В некоторых вариантах осуществления, в правое устройство 42 и левое устройство 42 могут направляться потоки различной величины, либо вследствие того, что калибрование системы рулевого управления показывает, что для осуществления рулевого управления одинаковой величины в каждом из соответствующих рулевых устройств 42, в каждом рулевом устройстве 42 требуются различные сигналы, либо вследствие того, что в каждом рулевом устройстве 42 требуются различные скорости рулевого управления.
[0085] В некоторых вариантах осуществления, задние рулевые устройства 42 также могут содержаться в двухканальном гидравлическом контуре, а также для управления рулением задних колес 18 могут задействовать гидравлические поршни, аналогичные поршню 52a. Например, для каждого из задних рулевых устройств 42 может предоставляться поршень 42a двустороннего действия (см. ФИГ. 5), при этом поршни 42a выполнены, соответственно, с возможностью поворота задних колес 18 на поворотных шкворнях 20. Клапанный узел 40b может обеспечивать (или предусматривать) различные давления жидкости с каждой стороны поршня 42a двустороннего действия внутри каждого (или обоих) задних рулевых устройств 42 на основании управляющей команды, получаемой из контроллера 58 (или из другого устройства). В ответ на данную разницу давлений, каждый поршень 42a может соответственно перемещаться внутри своего соответствующего цилиндра для того, чтобы механически поворачивать связанное с ним заднее колесо 18.
[0086] Режим содействия рулевому управлению задними колесами может быть полезным в различных случаях, в том числе во время работы транспортного средства 10c при повышенных скоростях (например, скоростях, превышающих 15 м/час или более). Например, при относительно низких скоростях крутящий момент, предоставляемый в передние колеса 14 гидравлическими двигателями 16b, может быть относительно большим. Соответственно, даже если поворотные шкворни 20 естественным образом не выравнивают задние колеса 18 с рулением транспортного средства 10c, транспортное средство 10c может быть способно сохранять подходящую траекторию движения за счет преодоления всякого противодействия в результате отклонения задних колес 18. Однако, при более высоких скоростях крутящий момент, предоставляемый в передние колеса 14, может быть немного ниже, а эффект отклонения задних колес 18 может быть немного более существенным. Соответственно, может быть полезно активно выравнивать задние колеса 18 с траекторией движения транспортного средства 10c (т.е., работать в режиме содействия рулевому управлению задними колесами), для того чтобы задние колеса 18 не отклоняли транспортное средство 10c от желательной траектории движения.
[0087] В некоторых вариантах осуществления, один или более изображенных поршней двустороннего действия в качестве альтернативы могут быть выполнены в виде поршня одностороннего действия. Например, один или оба поршня 42a в качестве альтернативы могут быть выполнены в виде поршня одностороннего действия под управлением клапанного узла 40b, при этом для управления маслом подпитки для поршней 42a предоставляется клапан различных известных конфигураций.
[0088] Однако, следует понимать, что режим содействия рулевому управлению задними колесами может быть полезным при различных скоростях транспортного средства 10c, и не должен использоваться исключительно, когда транспортное средство 10c движется с относительно высокими скоростями. Например, активное рулевое управление задними колесами 18 во время рулевое управление передними колесами 14 может уменьшать радиус поворота транспортного средства 10c в целом, что может приводить к улучшенной работе транспортного средства 10c внутри поля даже при низких скоростях. Как также описано ниже, активное рулевое управление задними колесами 18 также может быть полезным во время автоматического рулевого управления передними колесами 14 (например, для приведения в движение транспортного средства 10c в автоматическом режиме управления во время уборочной работы).
[0089] В некоторых вариантах осуществления, как отмечалось выше, транспортное средство 10c также может быть выполнено с возможностью работы в автоматическом режиме управления, в котором рулевое управление передними колесами 14 и задними колесами 18 может регулироваться автоматически (т.е., не на основании ручного ввода на рулевое колесо 26). Например, заданная траектория движения для транспортного средства 10c может определяться различными известными способами. Во время работы транспортного средства 10, и на основании заданной траектории движения, текущего положения транспортного средства 10c (например, которое определено на основании измерений посредством устройства 48 GPS) и различных других факторов, тогда контроллер 58 может определять подходящие управляющие команды для клапанного узла 40a для того, чтобы автоматически управлять рулением передних колес 14. Аналогичным образом, контроллер также может предоставлять управляющие команды в клапанный узел 40b для того, чтобы автоматически управлять рулением задних колес 18.
[0090] В некоторых вариантах осуществления, транспортное средство 10c может быть выполнено с возможностью автоматического выхода из автоматического режима управления по получении со стороны оператора ручного ввода руления. Например, если транспортное средство 10c работает в автоматическом режиме управления, а оператор тем не менее поворачивает рулевое колесо 26, данное приложение ручного ввода руления может определяться датчиком 30 рулевого управления. На основании определяемых ввода, контроллер 58 может прекратить предоставление активного ввода руления в одном или обоих клапанных узлах 40a и 40b, и, в некоторых вариантах осуществления, может активно отключать один или оба клапанных узла 40a и 40b.
[0091] Заданная траектория движения для транспортного средства 10c и подходящие автоматические управляющие команды на основании заданной траектории могут определяться различными способами на основании различных факторов. В некоторых вариантах осуществления, как отмечалось выше, для того, чтобы определять заданную траекторию движения транспортного средства или иным образом определять подходящие управляющие команды для автоматического режима управления, может использоваться устройство 48 GPS (или аналогичное устройство). Например, для уборочной работы, заданная траектория движения для транспортного средства 10c может проходить по полю по относительно прямой линии. По мере того, как транспортное средство 10c движется по полю, информации о положении транспортного средства 10c из устройства 48 GPS, а также другая информация (например, скорость транспортного средства относительно земли) может использоваться (например, контроллером 58) для определения, отклонилось ли транспортное средство 10c (или может ли отклониться) от прямолинейной траектории. Если выявляется отклонение (или ожидаемое отклонение) от заданной траектории движения на конкретную величину или в определенной степени, контроллер 58 может предоставлять в клапанные узлы 40a и 40b подходящие команды для корректирующего управления передними 14 и задними 18 колесами, соответственно и возврата транспортного средства 10c на траекторию (или удерживания на ней транспортного средства 10c).
[0092] Следует понимать, что могут быть возможны другие конфигурации. Например, в некоторых вариантах осуществления, различные контроллеры внутри клапанного узла 40a (или других клапанных узлах) могут принимать информацию о местоположении непосредственно из устройства 48 GPS, или устройство 48 GPS может содержать контроллер для предоставления подходящих основанных на GPS управляющих команд непосредственно в клапанные узлы 40a и 40b. Аналогичным образом, в некоторых вариантах осуществления, контроллер 58 (или другое устройство) может содержать интегрированный отслеживатель положения (например, интегрированное устройство GPS) (не показано).
[0093] В некоторых вариантах осуществления, как отмечалось выше, вследствие того, что нет прямого механического управляющего соединения между рулевым колесом 26 и каким-либо из клапанного узла 40a и рулевыми устройствами 42, общая архитектура управления (например, насос 44 и рулевое устройство 52) может использоваться для управления рулением передних колес 14 как в ручном, так и в автоматическом режимах, без необходимости отсоединения (или игнорирования) механического соединения между рулевым колесом 26 и различными рулевыми устройствами для перехода между режимами. Также, задние колеса 18 могут регулироваться одними и теми же самыми устройствами как в режиме содействия рулевому управлению задними колесами (в котором рулевое управление задними колесами 18 основано на ручном вводе руления), так и в автоматическом режиме управления (в котором задними колесами 18 управляют независимо от ручного ввода руления).
[0094] В некоторых вариантах осуществления, для того, чтобы осуществлять эффективное рулевое управление транспортным средством 10c регулировки рулевого управления как на передних колесах 14, так и на задних колесах 18 можно производить одновременно (или почти одновременно). В некоторых вариантах осуществления, регулировки рулевого управления можно производить непрерывно, или почти непрерывно, по мере того, как транспортное средство 10c движется по полю.
[0095] Также со ссылкой на ФИГ. 5, изображена более подробная схематичная иллюстративная система рулевого управления, содержащая иллюстративные конфигурации клапанных узлов 40a и 40b. Следует понимать, что конфигурация, представленная на ФИГ. 5, отображает только иллюстративную конфигурацию для раскрытой системы рулевого управления. Например, для того, чтобы осуществлять предусматриваемое рулевое управление, альтернативные системы, предусматриваемые данным раскрытием, могут содержать различные типы клапанов и конфигурации, отличающиеся от конфигураций, изображенных на ФИГ. 5. Кроме того, следует понимать, что различные другие составные элементы и системы (включая составные элементы и системы, не показанные на ФИГ. 5) могут взаимодействовать с одной или более частями системы, изображенными на ФИГ. 5. Например, насос 46 может использоваться для управления рулением задних колес 18, а также для подъема и перемещения жатки 12 транспортного средства 10c.
[0096] В изображенном варианте осуществления, ручной клапан 28 рулевого управления находится в гидравлическом сообщении с поршнем 52a таким образом, что управление гидравлическим потоком через клапан 28 может перемещать поршень 52a и посредством этого управлять скоростями гидравлических насосов 16a. Клапанный узел 40a также находится в гидравлическом сообщении с поршнем 52a таким образом, что гидравлический поток через клапанный узел 40a также может перемещать поршень 52a и посредством этого управлять скоростями гидравлических насосов 16a. Как обсуждается более подробно ниже, система может быть выполнена таким образом, что поршнем 52a одновременно управляет только один из клапана 28 и клапанного узла 40a (например, в зависимости от того, работает ли транспортное средство 10c в режиме ручного рулевого управления или автоматическом режиме управления).
[0097] Для управления рулением задних колес, клапанный узел 40b находится в гидравлическом сообщении с задними рулевыми устройствами 42, каждое из которых содержит поршень 42a двустороннего действия. Каждый поршень 42a может находиться в механическом сообщении с соответствующим поворотным шкворнем 20 или задним колесом 18 (не показано на ФИГ. 5) таким образом, что перемещение каждого поршня 42a может управлять связанным с ним задним колесом 18. Таким образом, для управления рулением задних колес 18 может использоваться гидравлический поток через клапанный узел 40b (например, которым управляют посредством контроллера 58 на основании заданной траектории движения или ручного ввода на рулевое колесо 26 (не показано на ФИГ. 5)).
[0098] Как изображено на ФИГ. 5, клапанные узлы 40a и 40b могут быть выполнены аналогичным образом (т.е., могут содержать клапаны аналогичных типов и межклапанные соединения). Например, каждый клапанный узел 40a и 40b может содержать управляемый блокировочный клапан (например, блокировочные клапаны 66a и 66b, соответственно, приводимые в действие управляющими клапанами 68a и 68b), различные главные клапаны регулирования потока (например, главные золотниковые клапаны 70a и 72a с изменяющимся положением и главные золотниковые клапаны 70b и 72b с изменяющимся положением, соответственно), и различные пропорциональные регулирующие клапаны (например, управляющие клапаны 74a и 76a, и управляющие клапаны 74b и 76b, соответственно) для управления главными клапанами регулирования потока. Данные и различные другие составные элементы клапанных узлов 40a и 40b могут находиться во взаимодействии с контроллером 58 посредством различных сигнальных линий (включая линии, не показанные на ФИГ. 5) таким образом, что контроллер 58 может быть выполнен с возможностью управления работой клапанных узлов 40a и 40b для управления рулением передних 14 и задних 18 колес, соответственно. Как изображено, например, электрические (например, текущие) сигналы, предоставляемые контроллером 58 в управляющие клапаны 74a, 74b, 76a и 76b, могут вызывать пропорциональное (или другое) открывание, соответственно, золотниковых клапанов 70a, 70b, 72a и 72b. Тогда автоматическое управление передними 14 и задними 18 колесами может регулироваться на основании данного управления золотниковыми клапанами 70a, 70b, 72a и 72b.
[0099] Блокировочные клапаны 66a и 66b могут быть выполнены, соответственно, с возможностью отключения клапанных узлов 40a и 40b на основании получения соответствующей команды (например, из контроллера 58). В связи с этим, блокировочные клапаны 66a и 66b могут управлять, соответственно, клапанными узлами 40a и 40b, включены ли они в активное управление, соответственно, рулением передних и задних колес. Как изображено, например, блокировочные клапаны 66a и 66b управляют потоком жидкости из насосов 44 и 46, соответственно, в главные золотниковые клапаны 70a и 72a и в главные золотниковые клапаны 70b и 72b. В связи с этим, находясь в закрытой конфигурации (например, в состоянии по умолчанию), блокировочные клапаны 66a и 66b могут подавать в золотниковые клапаны 70a, 72a, 70b и 72b поток в недостаточном количестве и посредством этого эффективно отключать рулевое управление передними 14 и задними 18 колеса посредством клапанных узлов 40a и 40b.
[00100] В режиме ручного рулевого управления, например, блокировочный клапан 66a может быть задействован, чтобы отсекать поток от насоса 44 через золотниковые клапаны 70a и 72a. Соответственно, в режиме ручного рулевого управления, ручной клапан 28 рулевого управления, но не клапанный узел 40a, может использоваться для управления рулением передних колес 14 посредством рулевого устройства 52. Аналогичным образом, когда транспортное средство работает не в автоматическом режиме или режиме содействия рулевому управлению задними колесами, блокировочный клапан 66b может быть задействован, чтобы отсекать поток от насоса 46 через золотниковые клапаны 70b и 72b. Соответственно, не может предоставляться автоматическое управление рулением задних колес. (В некоторых вариантах осуществления, блокировочный клапан 66b не может приводиться в действие таким образом, так что управление задними колесами может все-таки регулироваться автоматически посредством клапанного узла 40b. Как отмечалось выше, например, различные транспортные средства 10 могут быть выполнены с возможностью приведения в действие одновременно как в ручном режиме рулевого управления для передних колес 14, так и в режиме содействия рулевому управлению задними колесами 18).
[00101] Как изображено, блокировочные клапаны 66a и 66b приводятся в действие управляющими клапанами 68a и 68b, соответственно, при этом оба управляющих клапана 68a и 68b приводятся в действие насосом 44. Аналогичным образом, открывание и закрывание главных золотниковых клапанов 70a, 70b, 72a и 72b может регулироваться, соответственно, управляющими клапанами 74a, 74b, 76a и 76b, при этом каждый из управляющих клапанов 74a-76b также приводится в действие насосом 44. (Следует понимать, что также возможны другие компоновки насосов). Через управление главными клапанами 70a, 70b, 72a и 72b (которое осуществляется, например, через регулирование управляющих клапанов 74a, 74b, 76a и 76b), может регулироваться общий поток через клапанные узлы 40a и 40b, а также относительная величина гидравлического потока, направляемого в противоположные стороны различных поршней 42a и 52a двустороннего действия. Соответственно, с подходящей калибровкой коэффициентов усиления клапанов для данной управляющей команды (например, для данного сигнала электрического тока), управляющие команды, предоставляемые в различные управляющие клапаны 74a, 74b, 76a и 76b, могут приводить к конкретному потоку жидкости через различные главные клапаны 70a, 70b, 72a и 72b и посредством этого к конкретному приведению в действие поршней 42a и 52a. Как обсуждалось более подробно выше, это может приводить к конкретным операциям рулевого управления на передних 14 и задних 18 колесах.
[00102] Хотя клапанные узлы 40a и 40b изображены с демонстрацией в общем одинаковой компоновки клапанов (т.е., различных клапанов 66a-76b), узлы 40a и 40b не должны быть всегда выполнены идентично. Например, в некоторых вариантах осуществления, клапаны с большими размерами (или по другому большей емкости) могут использоваться в клапанном узле 40b, а не в клапанном узле 40a. Это может подходить, например, для того, чтобы учитывать более высокие ожидаемые давления и скорости потока внутри клапанного узла 40b, который подается насосом 46 высокого давления (в отличие от нагнетательного насоса 44 низкого давления). Калибровка и регулировка различных клапанов 66a-76b также может варьировать между клапанными узлами 40a и 40b. Например, в качестве конфигурации по умолчанию или в результате регулировки оператором, для множества различных управляющих клапанов 68a, 68b, 74a, 74b, 76a и 76b могут использоваться различные пропорциональные коэффициенты усиления.
[00103] Также могут быть возможны другие конфигурации. Как изображено, например, выпуски каждого из главных золотниковых клапанов 70b и 72b объединяются в общие гидравлические линии 96 и 98 таким образом, что клапаны 70b и 72b совместно управляют обоими поршнями 42a. В других вариантах осуществления, для управления одним из поршней 42a может предоставляться один или более клапанов (например, клапан 70b), а для независимого управления другими поршнями 42a могут предоставляться другие один или более клапанов (например, клапан 72b).
[0104] Аналогичным образом, в некоторых вариантах осуществления, могут быть устранены один или более различных управляющих клапанов 74a-76b (или других), а один или более главных клапанов 70a, 70b, 72a и 72b могут быть выполнены, соответственно, с возможностью действовать без управления. Например, один или более главных клапанов 70a, 70b, 72a и 72b могут быть выполнены в виде 3-позиционного, 4-ходового клапана (не показано), который закрывает поток в положении по умолчанию.
[0105] Также как отмечалось выше, в режиме содействия рулевому управлению задними колесами, передними колесами 14 можно управлять вручную, и клапанный узел 40b может принимать управляющие сигналы на основании ручного ввода руления, для того, чтобы предоставлять вспомогательное рулевое управление задними колесами 18. В связи с этим, в режиме содействия рулевому управлению задними колесами, блокировочный клапан 66b может приводиться в действие, допуская гидравлический поток в золотниковые клапаны 70b и 72b. Датчик 30 рулевого управления может определять конкретную скорость (или степень) поворота рулевого колеса 26 (например, который может быть обусловлен ручным вводом руления на рулевом колесе 26). Затем в один или более управляющих клапанов 74b и 76b может предоставляться соответствующий управляющий сигнал для того, чтобы управлять потоком через золотниковые клапаны 70b и 72b. Например, контроллер 58 может предоставлять электронный сигнал, который определен на основании ручного ввода руления, определяемого датчиком 30. Тогда поток через золотниковые клапаны 70b и 72b может управлять перемещением поршней 42a внутри заднего рулевого устройства 42, и посредством этого управлять рулением задних колес 18.
[0106] В автоматическом режиме управления, в котором рулением передних колес 14 и задними колесами 18 управляют автоматически, каждый из блокировочных клапанов 66a и 66b может приводиться в действие, обеспечивая поток, соответственно, в золотниковые клапаны 70a и 72a и в золотниковые клапаны 70b и 72b. Также как отмечалось выше, данный поток может предоставляться насосом 44 для клапанного узла 40a и насосом 46 для клапанного узла 40b. Для транспортного средства 10c может определяться заданная траектория, а контроллер 58 может использовать информацию о положении из устройства 48 GPS для определения отклонения (или ожидаемого отклонения) транспортного средства 10c от заданной траектории. Затем контроллер 58 может предоставлять в клапанные узлы 40a и 40b (т.е., в управляющие клапаны 74a и 76a и управляющие клапаны 74b и 76b, соответственно) подходящие управляющие команды для того, чтобы автоматически управлять передними 14 и задними 18 колесами.
[0107] С подходящей калибровкой, подобное автоматическое управление передними 14 и задними 18 колесами может корректировать отклонение от заданной траектории движения, и иным образом заставлять транспортное средство 10c в общем катиться по ней. Например, устройство 48 GPS может предоставлять в контроллер 58 сигналы, отображающие текущее местоположение транспортного средства 10c. Контроллер 58 может сравнивать данное текущее местоположение транспортного средства с заданной траекторией движения, с учетом текущей скорости транспортного средства относительно земли, степени поворота рулевого колеса (например, текущей ориентации задних колес 18 или текущих скоростей, соответственно, двух передних колес 14), и так далее, для того, чтобы определять, отклоняется ли транспортное средство 10c (или ожидается ли отклонение) от заданной траектории движения. Если отклонение выявляется (или предполагается), тогда в один или более управляющих клапанов 74a, 74b, 76a и 76b в клапанных узлах 40a и 40b может предоставляться подходящего команда для того, чтобы осуществлять подходящее рулевое управление посредством регулирующих клапанов 70a, 70b, 72a и 72b и поршней 52a и 42a рулевого управления.
[0108] Следует понимать, что в системе, изображенной на ФИГ. 5 (а также в других предусматриваемых системах рулевого управления) могут быть возможны различные регулировки. Например, в некоторых вариантах осуществления, операторы могут иметь возможность регулировки различных параметров, связанных с клапанными узлами 40 и 40b, такими как чувствительность конкретного клапана или коэффициент усиления конкретного клапана для конкретного управляющего сигнала. Например, оператор может избирательно регулировать коэффициент усиления множества пропорциональных управляющих клапанов 74a, 74b, 76a и 76b для того, чтобы управлять относительными величинами гидравлического потока через главные клапаны 70a, 70b, 72a и 72b (и посредством этого степенью поворота передних 14 и задних 18 колес) для заданной управляющей команды в управляющих клапанах 74a, 74b, 76a и 76b.
[0109] В некоторых вариантах осуществления, регулировки, осуществляемые в клапанных узлах 40a и 40b в отношении конкретного рабочего режима, не могут применяться в другом рабочем режиме. Например, для того, чтобы настроить рулевое управление задними колесами 18 транспортного средства 10c для режима содействия рулевому управлению задними колесами, оператор может регулировать коэффициенты усиления управляющих клапанов 74b и 76b клапанного узла 40b. Подобная регулировка может быть полезной, например, для увеличения (или уменьшения) величины поворота задних колес 18 (которыми управляют посредством клапанного узла 40b и поршней 42a) для данного ручного ввода на рулевое колесо 26 (которое определено датчиком 30 рулевого управления) и посредством этого настройки содействия рулевому управлению задними колесами по предпочтениям оператора. В некоторых вариантах осуществления, когда транспортное средство 10c переходит из режима содействия рулевому управлению задними колесами в автоматический режим управления, коэффициенты усиления управляющих клапанов 74b и 76b могут автоматически возвращаться к заданному уровню (или уровням) для того, чтобы обеспечивать подходящее координирование автоматического управления передними и задними колесами.
[0110] Также как отмечалось выше, в некоторых вариантах осуществления, насосом 44 может быть насос более низкого давления, чем насос 46. Кроме того, насос 44 может содержаться в гидравлическом контуре, который не находится в гидравлическом сообщении с гидравлическим контуром насоса 46 (кроме, потенциально, слива в тот же самый гидравлический резервуар). Например, насосом 44 может быть нагнетательный насос, в общем обеспечивающий давление подпитки в контур 84 давления подпитки, тогда как насосом 46 может быть насос рулевого управления, в общем обеспечивающий рабочее давление в контур 86 давления рулевого управления. Нагнетательный насос, как следует понимать, в общем используется в гидравлических системах, обеспечивая чтобы во время нормальной работы конкретный гидравлический контур или устройство оставалось должным образом заполнено текучей средой. На практике, нагнетательный насос не только содержит конкретный контур, должным образом заполненный текучей средой, но также может нагнетать давление в схеме до конкретного давления подпитки. Однако, обычно нагнетательный насос не обеспечивает рабочее давление в двигатели или другие устройства. Использование нагнетательного насоса (т.е., насоса 44) для приведения в действие переднего рулевого устройства 52, вместо использования отдельного выделенного насоса может приводить к существенной экономии стоимости и пространства, а также к другим преимуществам.
[0111] На ФИГ. 5 гидравлические контуры 84 и 86 в общем обозначены скобками. Следует понимать, что данные скобки являются приблизительными, и что некоторая часть контура 84 подпитки может продолжаться в левую часть ФИГ. 5. Как изображено на ФИГ. 5, части контура 84 давления подпитки, которые продолжаются в клапанный узел 40b, изображены более темным цветом, чем другие гидравлические линии клапанного узла 40b. Соответственно можно видеть, что хотя давление из нагнетательного насоса 44 может использоваться для приведения в действие управляющих клапанов 74b и 76b клапанного узла 40b, контур 84 давления подпитки не находится в гидравлическом сообщении с контуром 86 давления рулевого управления. Таким образом, хотя клапанный узел 40b может частично находиться под управлением потока из нагнетательного насоса 44, находящийся под давлением поток из нагнетательного насоса 44 не используется непосредственно для перемещения поршней 42a (и посредством этого управления задними колесами 18). Также как отмечалось выше, нагнетательный насос 44 в автоматическом режиме управления также может обеспечивать рабочее и управляющее давление в клапанный узел 40a, так что поток из насоса 44 используется для регулирования клапанного узла 40a и перемещения поршня 52a. Аналогичным образом, также в ручном режиме и режиме содействия рулевому управлению задними колесами нагнетательный насос 44 может обеспечивать находящийся под давлением поток через ручной клапан 28 рулевого управления также для того, чтобы перемещать поршень 52a.
[0112] Вследствие того, что контур давления подпитки (например, контур 84) в общем может быть выполнен с возможностью работы с меньшим давлением, чем другие контуры (например, контур 86 давления рулевого управления или гидравлический контур 16 управления приводом), нагнетательный насос (например, насос 44) в общем может быть выполнен с возможностью подачи гидравлической жидкости более низкого давления, чем другие насосы (например, насос 46 или насос 16a). В связи с этим, например, насос 44 может быть выполнен с возможностью предоставления текучей среды с относительно низким давлением (например, между приблизительно 150 фунтов на квадратный дюйм и 700 фунтов на квадратный дюйм). В отличие от этого, насос 46 может быть выполнен с возможностью предоставления текучей среды с относительно высоким давлением (например, между приблизительно 1200 и 3600 фунтов на квадратный дюйм). Данная конфигурация насоса 46 может быть целесообразными, например, вследствие того, что насосу 46 может быть необходимо предоставление достаточного давления для непосредственного регулирования ориентации задних колес 18 за счет прямого перемещения поршней 42a. Во время работы транспортного средства 10c, данная механическая регулировка задних колес 18 иногда может требовать существенного ввода (например, для преодоления массы транспортного средства 10c, а также различных колдобин или других препятствий на земле). Соответственно, может быть целесообразным обеспечение для насоса 46 насоса более высокого давления. В отличие от этого, насосу 44 может быть необходимо предоставление только давления, достаточного для перемещения поршня 52a, при этом насос 16a привода более высокого давления предоставляет движущую энергию для колес на основании положения поршня 52a.
[0113] В изображенном варианте осуществления, клапанный узел 40a может полностью содержаться в контуре 84 давления подпитки, так что различные клапаны клапанного узла 40a могут снабжаться давлением подпитки из насоса 44, а также могут активно приводиться в действие давлением из насоса 44. Например, для того, чтобы автоматически управлять рулением передних колес 14, управляющие клапаны 74a и 76a могут приводиться в действие гидравлической жидкостью из насоса 44 (и контура 84 подпитки) для того, чтобы открывать или закрывать золотниковые клапаны 74a и 76a. (Управляющий клапан 68a также может подпитываться и приводиться в действие потоком из насоса 44). Кроме того, золотниковые клапаны 74a и 76a сами могут регулировать поток из насоса 44 (и контура 84 подпитки) в рулевое устройство 52 для того, чтобы управлять рулением передних колес 14. Опять же, использование контура 84 подпитки более низкого давления для приведения в действие клапана 40a, а также для предоставления в него давления подпитки может быть возможно вследствие того, что поршень 52a не может непосредственно перемещать передние колеса 14, но вместо этого может направлять передние колеса 14 посредством регулирования скорости насосов 16a привода более высокого давления.
[0114] Также как изображено, контур 84 давления подпитки выполнен таким образом, что во время ручного режима рулевого управления, насос 44 давления подпитки предоставляет поток через ручной клапан 28 рулевого управления. Таким образом, даже если для управления рулением передних колес 14 клапанный узел 40a не используется, насос 44 все-таки может использоваться для перемещения поршня 52a и посредством этого управления скоростью передних колес 14. Как отмечалось выше, во время автоматического режима управления, насос 44 давления подпитки также используется для приведения клапанного узла 40a в действие и для обеспечения работы управляющих клапанов 68b, 74b и 76b в клапанном узле 40b во время режимов содействия рулевому управлению задними колесами и автоматического управления.
[0115] В отличие от клапанного узла 40a, В изображенном варианте осуществления, клапанный узел 40b может быть интегрирован в контур 86 давления рулевого управления, а также в контур 84 давления подпитки. Например, насос 44 может обеспечивать давление подпитки в клапанный узел 40b, с потоком из насоса 44, приводящего в действие различные управляющие клапаны 68b, 74b и 76b. Однако, рулевое устройство 42 может приводиться в действие гидравлическим потоком из насоса 46 и контура 86 давления рулевого управления, направляемого через различные управляемые клапаны 66b, 70b и 72b. Как отмечалось выше, насос 46 и контур 86 давления рулевого управления может быть в общем выполнен с возможностью работы при значительно больших давлениях, чем насос 44 и контур 84 давления подпитки. Это может быть целесообразным, например, для преодоления сопротивления предметов на земле (например, колдобин, курганов, камней, ветвей и так далее) для поворота колес 18.
[0116] Использование для насоса 46 устройства более высокого давления, чем для насоса 44 (например, использование для насоса 44 нагнетательного насоса) также может быть целесообразным, если насос 46 используется для приведения в действие других систем транспортного средства 10c. Например, между насосом 46 и клапанным узлом 40b может быть предоставлен приоритетный клапан 78. Клапан 78 может быть выполнен с возможностью управления маршрутизацией потока из насоса 46 в клапанный узел 40b, а также в различные другие системы (не показано). Когда работа других систем (например, поднимающей или поплавковой системы для жатки 12) может требовать существенных гидравлических давлений, использование для насоса 46 насоса достаточно высокого давления таким образом может облегчить одновременное (или иным образом) приведение насосом 46 в действие рулевого управления задними колесами (посредством клапанного узла 40b) и другой системы. Даже если одновременная работа не является необходимой, использование для насоса 46 насоса высокого давления может позволить единственному насосу приводить в действие поршни 42a, а также устройства других различных систем (не показано).
[0117] Конфигурация насоса 44 в виде нагнетательного насоса, который также может предоставлять давление подпитки в различные другие системы (не показано) транспортного средства 10c, также может обеспечивать существенную экономию стоимости и пространства для транспортного средства 10c. Например, когда нагнетательный насос уже используется для других систем транспортного средства 10c, использование нагнетательного насоса для приведения в действие клапанного узла 40a и для приведения в действие поршня 52a может обеспечить возможность осуществления автоматического управления передними колесами без необходимости в дополнительном насосе.
[0118] В некоторых вариантах осуществления, управление рулением транспортного средства 10c может осуществляться в виде части способа мультирежимного рулевого управления («MMS»), такого как способ 200 MMS. Способ 200 MMS может быть представлен в виде наборов различных команд и подпрограмм, хранящихся в устройстве хранения, образующем часть контроллера 58 (или иным образом соединенным с ним) и может выполняться одним или более процессорами и одной или более архитектурами памяти (например, которые содержатся в контроллере 58 или связаны с ним). В некоторых вариантах осуществления, способом 200 MMS может быть отдельный способ. В некоторых вариантах осуществления, способ 200 MMS может действовать в виде части одного или более других способов или процессов или в сочетании с ними, и/или может включать один или более других способов или процессов. Также, в некоторых вариантах осуществления, способ 200 MMS может быть представлен и осуществляться посредством конфигурации, полностью основанной на аппаратных средствах, или в виде управляющей конструкции с гидравлическим или механическим приводом, в дополнение или в качестве альтернативы конфигурации, имеющей способ 200 MMS в виде комплекта команд, хранящихся в устройстве хранения (например, в устройстве хранения, содержащемся в контроллере 58 или связанным с ним). В процессе следующего обсуждения, способ 200 MMS будет описан для иллюстративных целей. Однако, следует понимать, что могут быть возможны другие варианты выполнения.
[0119] Также со ссылкой на ФИГ. 6, для того, чтобы управлять рулением задних колес транспортного средства, способ 200 MMS может включать определение 202 команды управления задними колесами (например, контроллером 58). В автоматическом режиме управления, определенная 202 команда управления задними колесами может определяться автоматически 220 на основании заданной траектории движения для транспортного средства. Например, контроллер может использовать GPS и другую информацию для того, чтобы определять, отклоняется ли транспортное средство (или ожидается ли отклонение) от заданной траектории движения и может автоматически определять 220 команду управления задними колесами на основании данного отклонения (или ожидаемого отклонения). В режиме содействия рулевому управлению задними колесами, команда управления задними колесами в качестве альтернативы может определяться 202 на основании определения 222 ручного ввода руления. Например, датчик рулевого управления может определять 222 ручной ввод руления, в устройстве ввода руления и может передавать в контроллер соответствующий сигнал. Контроллер затем может определять 202 команду управления задними колесами на основании определяемого 222 ручного ввода.
[0120] После определения 202 управляющая команда 204 может предоставляться в задний клапанный узел. Задний клапанный узел затем может гидравлически управлять 206 задним рулевым устройством для того, чтобы управлять одним или более задними колесами. Например, контроллер может предоставлять 204 в один или более управляющих клапанов, содержащихся в заднем клапанном узле, электронный (например, токовый) сигнал. Для того, чтобы управлять рулением задних колес, различные управляющие клапаны могут быть выполнены с возможностью управления другими клапанами в заднем клапанном узле и посредством этого управления гидравлическим потоком через задний клапанный узел в ответ на предоставленный 204 сигнал. Например, управляющие клапаны могут приводить в действие два по разному регулируемых золотниковых клапана для того, чтобы избирательно переносить гидравлическую жидкость в какую-либо сторону двух цилиндров двустороннего действия и посредством этого направлять два связанных с ними задних колеса.
[0121] В некоторых вариантах осуществления, автоматический режим управления может заканчиваться 208 на основании определения 224 ручного ввода руления. Например, во время автоматического режима управления, рулевое управление задними колесами может быть гидравлически управляемым 206 в заднем рулевом устройстве с управляющими командами, которые автоматически определяются 220 на основании заданной траектории движения для транспортного средства. В автоматическом режиме управления, соответственно, оператору может быть не нужно обеспечивать приложение ручного ввода руления на соответствующем устройстве ввода руления (например, на рулевом колесе). В самом деле, в некоторых вариантах осуществления, определение 224 ручного ввода руления, в устройстве ввода руления, может быть принято в качестве указателя, что оператор хочет выйти из автоматического режима управления и, соответственно, может быть восстановлено ручное управление. В некоторых вариантах осуществления, это может соответствовать выключению 210 переднего клапана рулевого управления и рулевому управлению 212 передними колесами на основании ручного ввода руления. В некоторых вариантах осуществления, транспортное средство может быть переведено в режим содействия рулевому управлению задними колесами с ручным рулевым управлением передними колесами и автоматическим управлением задними колесами.
[0122] Также со ссылкой на ФИГ. 7, для того, чтобы управлять рулением передних колес транспортного средства, способ 200 MMS может включать определение 230 команды управления передними колесами. В автоматическом режиме управления, определяемая 230 команда управления передними колесами может определяться автоматически 246 на основании заданной траектории движения для транспортного средства. Например, контроллер может использовать GPS и другую информацию для того, чтобы определять, отклоняется ли транспортное средство (или ожидается ли отклонение) от заданной траектории движения, и может автоматически определять 246 команду управления задними колесами на основании данного отклонения (или ожидаемого отклонения). В режиме ручного рулевого управления, команда управления передними колесами в качестве альтернативы может определяться 230 на основании получения 248 ручного ввода руления. Например, ручной ввод руления, может быть получено 248 в устройстве ввода руления (например, на рулевом колесе) таким образом, что клапан рулевого управления во взаимодействии с устройством ввода руления предоставляет различные гидравлические управляющие команды (т.е., различный перенос гидравлического потока) на основании ручного ввода руления.
[0123] После определения 230, управляющая команда может предоставляться 232 в устройство рулевого управления передними колесами или в передний клапанный узел во взаимодействии с передним рулевым устройством. Таким образом, передним рулевым устройством можно гидравлически управлять 234 для того, чтобы управлять рулением передних колес. Например, в автоматическом режиме управления, управляющая команда может определяться 246 контроллером на основании заданной траектории. Контроллер может затем предоставлять 232 электронный (например, токовый) сигнал в один или более управляющих клапанов, содержащихся в переднем клапанном узле. Различные управляющие клапаны могут быть выполнены с возможностью управления другими клапанами в переднем клапанном узле и посредством этого управления гидравлическим потоком через передний клапанный узел в ответ на предоставление 232 сигнала для того, чтобы управлять рулением задних колес. Например, управляющие клапаны могут приводить в действие два по разному регулируемых золотниковых клапана для того, чтобы избирательно переносить гидравлическую жидкость в каждую сторону цилиндра двустороннего действия и посредством этого заставлять насосы приводить в действие передние колеса с вращением с различными скоростями. В отличие от этого, в ручном режиме приведение в действие ручного клапана рулевого управления устройством ввода руления может вызывать предоставление 232 клапаном гидравлического сигнала непосредственно в переднее рулевое устройство для того, чтобы аналогичным образом направлять передние колеса.
[0124] В некоторых вариантах осуществления, автоматический режим управления может заканчиваться 236 на основании определения 250 ручного ввода руления. Например, во время автоматического режима управления, рулевое управление передними колесами может иметь гидравлический привод 234 на переднем рулевом устройстве с управляющими командами, которые автоматически определяются 246 на основании заданной траектории движения для транспортного средства. В автоматическом режиме управления, соответственно, оператору может быть не нужно обеспечивать приложение ручного ввода руления на соответствующем устройстве ввода руления (например, на рулевом колесе). В самом деле, в некоторых вариантах осуществления, определение 236 ручного ввода руления, в устройстве ввода руления может восприниматься в качестве указателя, что оператор хочет выйти из автоматического режима управления, и, соответственно, может быть восстановлено ручное управление. В некоторых вариантах осуществления, это может соответствовать отключению 238 переднего клапана рулевого управления и рулевого управления 240 передними колесами на основании ручного ввода руления.
[0125] В некоторых вариантах осуществления, может быть полезно отключать автоматическое управление передними 14 или задними 18 колесами, если определено, что соответствующий регулирующий клапан заклинило (или если определена другая поломка рулевого управления). Снова со ссылкой на ФИГ. 5, например, если клапан внутри клапанного узла 40b (например, один или оба главных золотниковых клапана 70b и 72b) заклинивают (или иным образом выходят из строя), гидравлическое давление в заднем рулевом устройстве 42 может стремиться блокировать задние колеса 18 в конкретной ориентации. Это может приводить к слабому следованию задних колес 18 рулевому управлению, выполняемому на передних колесах 14, и к нежелательному торможению транспортного средства 10c (например, если задние колеса 18 заблокированы заклинившим клапаном под соответствующим углом относительно направления движения транспортного средства 10c).
[0126] В некоторых вариантах осуществления, для того, чтобы определять, заклинило ли клапан внутри клапанного узла 40b (или произошла другая поломка), в клапанном узле 40b (или другом клапанном узле) может содержаться (или находиться в гидравлическом сообщении с ним иным образом) датчик давления (например, датчик 92 давления). Если на основании показаний давления из такого датчика давления выявляется заклинивший клапан (или другое неблагоприятное состояние), клапаном 40b может быть избирательно отключено рулевое управление задними колесами.
[0127] Как изображено, датчик 92 давления расположен в гидравлическом сообщении с некоторыми отводящими линиями 94 обоих главных золотниковых клапанов 70b и 72b клапанного узла 40b. Вследствие конфигурации клапанов 70b и 72b, данные отводящие линии 94 могут находиться в гидравлическом сообщении с отводящими линиями 96, ведущими из клапанов 70b и 72b в рулевые устройства 42, когда клапаны 70b и 72b используются для управления рулевыми устройствами 42. Соответственно, датчик 92 давления может быть выполнен с возможностью определения для каждого из клапанов 70b и 72b выпускного давления, которое может соответствовать управляющему давлению, предоставляемому клапанным узлом 40b в рулевые устройства 42 (т.е., управляющему давлению внутри каждой из отводящих линий 96). Как изображено, датчик 92 давления находится во взаимодействии с обоими клапанами 70b и 72b, так что датчик 92 давления выполнен с возможностью определения более высокого из выпускных давлений, соответственно, двух клапанов 70b и 72b. Также могут быть возможны другие конфигурации.
[0128] Если давление, измеренное датчиком 92 давления, не совпадает с ожидаемым давлением для конкретной управляющей команды (например, команды контроллера 58 в управляющие клапаны 74b и 76b для приведения в действие золотниковых клапанов 70b и 72b), может быть определено, что вышли из строя (например, заклинили) один (или оба) золотниковых клапана 70b и 72b. Соответственно, контроллер 58 может заставить блокировочный клапан 66b перекрыть гидравлический поток в клапанный узел 40b и посредством этого отключить клапанный узел 40b от управления рулением задних колес 18. Аналогичным образом, если давление, измеренное датчиком 92 давления, не совпадает с ожидаемым давлением в отсутствии конкретной управляющей команды, может быть определено, что вышли из строя (например, заклинили) один (или оба) золотниковых клапана 70b и 72b. Соответственно, контроллер 58 может опять же заставлять блокировочный клапан 66b перекрыть гидравлический поток в клапанный узел 40b и посредством этого отключить клапанный узел 40b от управления рулением задних колес 18.
[0129] Для того, чтобы решать различные потенциальные проблемы с клапанным узлом 40b можно осуществлять различные стратегии управления с использованием датчика 92 давления. В некоторых вариантах осуществления, также как отмечалось выше, датчик 92 давления может использоваться для контролирования выпускного давления главных клапанов 70b и 72b. При определении датчиком 92 конкретного давления и на основании различных других факторов, включая скорость транспортного средства 10c, суть представленных (или предыдущих) управляющих команд, предоставляемых в клапанный узел 40b (или его отдельные клапаны), и так далее, блокировочный клапан 66b тогда может приводиться в действие для отключения клапанного узла 40b. Например, если транспортное средство 10 движется со скоростью, превышающей пороговую скорость, и в это время в клапанный узел 40b не предоставляется управляющая команда, может быть идентифицирован выход из строя клапанного узла 40b на основании определения давления датчиком 92 давления, которое больше, чем конкретное пороговое давление. Аналогичным образом, если транспортное средство 10 движется выше пороговой скорости, и в это время в клапанный узел 40b предоставляется управляющая команда, выход из строя клапанного узла 40b может быть идентифицирован на основании определения давления датчиком 92 давления, которое не может увеличиться на пороговую величину (или иным образом измениться в необходимой степени) в пределах конкретного времени после подачи управляющей команды.
[0130] В некоторых вариантах осуществления, подобная стратегия может с пользой отключать клапанный узел 40b, когда заклинивает отдельный клапан клапанного узла 40b, но не может отключать клапанный узел 40b просто на основании временных сигналов давления. Например, по мере того, как транспортное средство 10c движется по полю, воздействия на задние колеса 18 (например, со стороны камней, бревен и так далее) могут привносить в клапанный узел 40b временные скачки давления (и другие колебания) через поршни 42a двустороннего действия рулевых устройств 42. Соответственно, давление, измеренное в датчике 92 давления, может демонстрировать временные скачки (и другие колебания), которые не связаны с заклинившими клапанами внутри клапанного узла 40b (или другой неполадкой клапанного узла 40b). В некоторых вариантах осуществления, посредством регулирования блокировочного клапана 66b на основании показаний давления в датчике 92 давления, только когда транспортное средство движется выше пороговой скорости, можно избежать необоснованного отключения клапанного узла 40b. В некоторых вариантах осуществления, может использоваться пороговая скорость, равная 15 миль в час (или выше).
[0131] В некоторых вариантах осуществления, управление клапанным узлом 40b на основании показаний давления в датчике 92 давления (или аналогичное управление клапанным узлом 40b или другим клапанным узлом) может осуществляться в виде части способа определения неисправностей рулевого управления («SFD»), такого как способ 300 SFD. Способ 300 SFD может быть представлен в виде различных наборов команд и подпрограмм, хранящихся в устройстве хранения, образующем часть контроллера 58 (или соединенном с ним иным образом), и может выполняться одним или более процессорами и одной или более архитектурами памяти (например, которая содержится в контроллере 58 или связана с ним). В некоторых вариантах осуществления, способом 300 SFD может быть отдельный способ. В некоторых вариантах осуществления, способ 300 SFD может действовать в виде части одного или более других способов или процессов или в сочетании с ними, и/или может включать в себя один или более других способов или процессов. Также, в некоторых вариантах осуществления, способ 300 SFD может быть представлен и осуществлен посредством конфигурации, полностью основанной на аппаратных средствах, или в виде управляющей конструкции с гидравлическим или механическим приводом, в дополнение или в качестве альтернативы конфигурации, имеющей способ 300 SFD в виде комплекта команд, хранящихся в устройстве хранения (например, устройстве хранения, содержащемся в контроллере 58 или связанном с ним).
[0132] в процессе следующего обсуждения, способ 300 SFD будет описан для иллюстративных целей. Однако, следует понимать, что могут быть возможны другие варианты выполнения. Кроме того, хотя в некоторых примерах в данной заявке обсуждается осуществление способа 300 относительно клапанного узла 40b и контроллера 58, следует понимать, что в других вариантах выполнения могут использоваться (и регулироваться) другие устройства.
[0133] Также со ссылкой на ФИГ. 8, в некоторых вариантах осуществления способ 300 SFD может включать определение 302 скорости сельскохозяйственного транспортного средства относительно земли. Например, для определения скорости, с которой транспортное средство движется по земле, может использоваться датчик числа оборотов колес (не показано), датчик числа оборотов двигателя (не показано), устройство 48 GPS или другое устройство (или устройства). В некоторых вариантах осуществления, способ 300 SFD может осуществляться, только если определенная 302 скорость относительно земли превышает конкретное пороговое значение (например, 15 м/час или выше).
[0134] Также могут быть проведены определения других пороговых значений. Например, в некоторых вариантах осуществления, способ 300 может включать определение 324, была ли выбрана передача для приведения в движение транспортного средства. Если передача не была выбрана, транспортное средство не может активно двигаться, и способ 300 может завершиться без идентификации неисправности в соответствующем клапанном узле. В некоторых вариантах осуществления, способ 300 может включать идентификацию 326, имеет ли транспортное средство в настоящее время какую-либо известную неисправность рулевого управления или другую неисправность (например, неисправность рулевого управления задними колесами, идентифицированную способом 300, или неисправность рулевого управления в соответствующем датчике давления (например, в датчике 92). Если текущая неисправность идентифицирована 326, способ 300 также может завершиться (например, вследствие того, что соответствующие системы управления уже могли быть отключены, с учетом идентификации 326 текущей неисправности).
[0135] Если соответствующие определения пороговых значений являются удовлетворительными (например, если определена 302 подходящая скорость относительно земли, определено 324, что транспортное средство включено, и не идентифицированы 326 другие текущие неисправности), способ 300 может включать определение 304, предоставлена ли в настоящее время в клапанный узел 40b управляющая команда. Например, что касается транспортного средства 10c, контроллер 58 может определить 304, предоставляет ли контроллер 58 в настоящее время управляющую команду в управляющие клапаны 74b и 76b для того, чтобы управлять рулением задних колес 18. Если не определено 304, что управляющая команда в настоящее время предоставляется в соответствующий клапанный узел (например, клапанный узел 40b), способ 300 может завершиться и без идентификации неисправности в клапанном узле.
[0136] Способ 300 также может включать определение 306 рабочего давления в клапанном узле 40b. Как изображено, рабочее давление может определяться 306 датчиком 92 давления и может указываться большее из давлений на выходе, соответственно, главных клапанов 70b и 72b. Могут быть возможны другие компоновки.
[0137] Если определена 302 соответствующая скорость относительно земли (или совпадают определения других пороговых значений), и определено 304, что в настоящее время предоставляется управляющая команда, способ 300 может включать определение 306 рабочего (например, текущего) давления на соответствующем клапанном узле. В некоторых вариантах осуществления, датчик 314 давления может использоваться для определения 306 давления одного или более гидравлических сигналов, предоставляемых в рулевое устройство клапанным узлом. Например, датчик 92 давления (см. ФИГ. 5) может быть выполнен с возможностью определения 306 большего из давлений клапанов 70b и 72b на выходе для управления рулевыми устройствами 42.
[0138] Пороговое давление может определяться 308 на основании одного или более из определенной 302 скорости относительно земли и определения 304, предоставляется ли в клапанный узел 40b управляющая команда. Определенное 308 пороговое давление может варьировать на основании определенной 302 скорости относительно земли, была ли определена 304 управляющая команда и различных других факторов. Например, большее пороговое значение давления (например, между 1500 фунтов на квадратный дюйм и 2300 фунтов на квадратный дюйм) может определяться 308, если определено 304, что управляющая команда не предоставляется, и если определено 302, что скорость транспортного средства относительно земли является относительно высокой (например, 15 м/час или выше). Однако, в других случаях может определяться 308 меньшее пороговое значение давления, (например, если определено 304, что в настоящее время предоставляется управляющая команда).
[0139] В некоторых вариантах осуществления, пороговое значение давления может определяться 308 на основании ожидаемого изменения рабочего давления после осуществления конкретной управляющей команды. Например, когда было определено 304, что в соответствующий клапанный узел (например, клапанный узел 40b) предоставляется управляющая команда, для времени, предшествующему началу определенной 304 управляющей команды, может определяться 320 первоначальное давление в клапанном узле. Например, в некоторых вариантах осуществления, датчик 92 давления может быть выполнен с возможностью непрерывного определения 306 данных давления, так что способ 300 может включать запрашивание зарегистрированных измерений давления для того, чтобы определять 320 рабочее давление непосредственно перед началом управляющей команды (т.е., первоначального давления). Затем, для того, чтобы определить 308 подходящее пороговое давление, к определяемому 320 первоначальному давлению может быть добавлено 322 конкретное смещение (например, которое основано на конкретной управляющей команде, определенной 302 скорости транспортного средства или других факторах).
[0140] С определенным 308 и 304 пороговым давлением и давлением в соответствующем клапанном узле (или другом устройстве), рабочее давление в клапанном узле может сравниваться 310 с пороговым давлением. На основании данного сравнения 310, может быть идентифицирована 312 неисправность рулевого управления, и регулирование гидравлического рулевого управления задними колесами посредством соответствующего клапанного узла 40b в соответствующих случаях может быть отключено 316. Например, если было определено 304, что в настоящее время не предоставляется управляющая команда, неисправность рулевого управления (например, заклинивший клапан) может быть идентифицирована 312 на основании рабочего давления, превышающего определенное 308 пороговое давление. Затем может быть автоматически отключено 316 рулевое управление посредством клапанного узла. Например, для того, чтобы отключить 316 клапанный узел 40b в транспортном средстве 10c, может приводиться в действие (например, посредством электронного управления управляющим клапаном 68b) блокировочный клапан 66b.
[0141] Аналогичным образом, если было определено 304, что в настоящее время предоставлена управляющая команда, неисправность рулевого управления (например, заклинивший клапан) может быть идентифицирована 312 на основании рабочего давления, не превышающего определенное 308 пороговое давление в пределах конкретного количества времени после предоставления управляющей команды. Например, в транспортном средстве 10c, если управляющая команда в клапанный узел 40b не приводит к увеличению конкретного давления в датчике 92 давления в пределах конкретного количества времени (например, 500 мс) предоставления управляющей команды, блокировочный клапан 66b может приводиться в действие для отключения 316 клапанного узла 40b.
[0142] Снова со ссылкой на ФИГ. 5, когда транспортное средство 10c (или 10a или 10b и так далее) находится в конкретном состоянии, различные предусмотренные системы рулевого управления могут автоматически возвращать различные составные элементы рулевого управления (например, поршни 42a и 52a рулевых устройств 42 и 52) в состояние по умолчанию. Например, при определении (различными известными способами), что транспортное средство 10c находится в состоянии парковки, клапанный узел 40a может быть отрегулирован автоматически ориентировать поршень 52a внутри цилиндра рулевого устройства 52. Таким образом, когда транспортное средство 10c берут с парковки, оно будет сконфигурировано первоначально двигаться в направлении по прямой вперед (или назад).
[0143] Например, в некоторых вариантах осуществления, при определении, что транспортное средство 10c было помещено на стоянку, контроллер 58 может направлять клапанный узел 40a автоматически повторно центрировать поршень 52a внутри цилиндра рулевого устройства 52. Данное повторное центрирование поршня 52a также может, например, с пользой располагать насосы 16a привода в нейтральном состоянии таким образом, что насосы 16a не могут преодолеть стояночный тормоз.
[0144] Также как отмечалось выше, подобная ориентация поршня 52a (или другого рулевого устройства или его составного элемента) может рассматриваться в качестве ориентации нейтрального состояния, состояния нулевого управления или «повторного центрирования». Следует понимать, что некоторые рулевые устройства, включая поршень 52a, могут находиться в нейтральном состоянии или состоянии нулевого управления, даже если не ориентированы точно в центре соответствующего диапазона движения (т.е., даже если «центрированы» не полностью). В связи с этим, следует понимать, что состояние «повторного центрирования», может ссылаться просто на ориентацию нулевого управления или нейтральную ориентацию рулевого устройства (например, поршня 52a), а не указывать обязательно на местоположение физического центрирования самого рулевого устройства. Также, следует понимать, что маленькая величина поворота рулевого колеса (например, поворот рулевого колеса в небольшой степени и так далее) может иногда возникать, даже в состоянии нулевого управления.
[0145] В обсуждающихся ниже примерах, может подробно обсуждаться повторное центрирование рулевых устройств для передних колес 14. Следует понимать, что в некоторых вариантах осуществления различные регулировки для задних колес 18 (например, посредством задних рулевых устройств 42) также могут проделываться на основании определения конкретного состояния транспортного средства. Например, клапанный узел 40b может действовать с повторным центрированием задних поршней 42a рулевых устройств 42 таким образом, что когда транспортное средство 10c забирают с парковки, задние колеса 18 могут располагаться для прямого перемещения вперед (или назад). В качестве альтернативы, в некоторых вариантах осуществления, клапан 40a (или клапан 40b) может просто выключаться (например, за счет приведения в действие блокировочных клапанов 66a или 66b) при определении конкретного состояния транспортного средства (например, при определении, что транспортное средство 10c было помещено на стоянку). В некоторых вариантах осуществления, для поршней 42a, задних колес 18 или других составных элементов могут предоставляться датчики положения (не показано), причем эти датчики могут быть выполнены с возможностью определения ориентации задних колес 18 таким образом, чтобы задние колеса 18 можно было повторно центрировать соответствующим образом.
[0146] Как отмечалось выше, по разным причинам может быть полезно повторно центрировать систему рулевого управления (т.е., перемещать систему таким образом, чтобы не осуществлялось рулевое управление соответствующими колесами). Повторное центрирование рулевого управления для колес с гидравлическим приводом, например, может содействовать гарантированию, чтобы управляющие команды не являлись причиной преодоления колесами стояночного тормоза. Повторное центрирование также может помочь обеспечению, чтобы внутри системы рулевого управления (или привода) не сохранялось чрезмерное гидравлическое (или другое) давление для того, чтобы соответствующее транспортное средство неожиданно не двинулось при выходе с парковки. В некоторых вариантах осуществления, рулевое управление транспортного средства 10c (или других аналогичных транспортных средств) может быть повторно центрировано посредством способа Повторного Центрирования Рулевого Управления («SR»), такого как способ 400 SR.
[0147] Также со ссылкой на ФИГ. 9, способ 400 SR может включать определение 402, находится ли сельскохозяйственное транспортное средство в состоянии парковки. В некоторых вариантах осуществления, находится ли транспортное средство в состоянии парковки, может определяться 402 на основании датчиков, связанных с гидравлическими (или другими) устройствами управления для транспортного средства. Например, определение 402, припарковано ли транспортное средство, может включать определение 404, находится ли рукоятка управления (например, рычаг, диск или ручка) или другое устройство управления для управления перемещением транспортного средства (например, кнопка, комплект кнопок, графический пользовательский интерфейс и так далее), в пределах «нейтрального» диапазона, в котором не поступает команда перемещения вперед или назад. Что касается транспортного средства 10c, например, рычаг 32 гидроуправления (см. ФИГ. 1) может быть выполнен с возможностью перемещения вперед для привода на передние колеса и назад для привода на задние колеса. В диапазоне ориентаций между различными передними и задними положениями, рычаг 32 управления может быть установлен в нейтральное положение (т.е., не подавая команду движения ни вперед, ни назад). Когда транспортное средство 10c находится в состоянии парковки, система привода для транспортного средства 10c также обычно находится в нейтральном положении. Соответственно, может быть полезно определять 402 состояние парковки транспортного средства 10c на основании определения 404 ориентации рычага 32 управления.
[0148] Находится ли транспортное средство в состоянии парковки, также может быть определено 402 на основании определения 406, был ли включен стояночный переключатель. В некоторых вариантах осуществления, стояночным переключателем может быть механический переключатель, выполненный с возможностью включения (например, инициирования) за счет перемещения рукояти управления. В транспортном средстве 10c, например, механическое переключатель 32a (см. ФИГ. 1) может располагаться таким образом, что рычаг 32 гидроуправления инициирует (или высвобождает) переключатель 32a, когда рычаг 32 управления фиксируют (по меньшей мере до некоторой степени) в нейтральном положении. Это может иметь различные результаты, такие как автоматическое включение стояночного тормоза для транспортного средства 10c. Находится ли транспортное средство 10c в состоянии парковки соответственно может определяться 402 на основании, по меньшей мере частично, определения 406, был ли включен стояночный переключатель (например, переключатель 32a) посредством рычага 32. В других вариантах осуществления, стояночный переключатель может быть выполнен с возможностью включения посредством детали, не являющейся рукоятью управления (например, непосредственно посредством ручного манипулирования).
[0149] В некоторых вариантах осуществления, способ 400 может включать определение 402, что транспортное средство находится в состоянии парковки на основании определения 404, что рукоятка управления транспортным средством находилась в нейтральном диапазоне в течение первого заданного временного интервала 408. Это может быть полезно, например, для подтверждения, что транспортное средство фактически находится в состоянии парковки, перед подачей соответствующей команды автоматического повторного центрирования рулевого управления. Например, когда оператор использует рычаг 32 управления для перехода транспортного средства 10c от движения вперед к движению назад, оператор может перемещать рычаг 32 управления через нейтральный диапазон. Для того, чтобы избежать в этом (и других) случаях подачи команды автоматического повторного центрирования передних колес 14, может быть полезно определять 402 состояние парковки транспортного средства 10c, только если определено 404, что рычаг 32 управления находится в нейтральном диапазоне в течение конкретного интервала 408 времени (например, 1,5 секунды или более).
[0150] В некоторых вариантах осуществления, способ 400 может дополнительно (или в качестве альтернативы) включать определение 402, что транспортное средство находится в состоянии парковки на основании определения 406, что стояночный переключатель был включен в течение первого (или другого) заданного временного интервала 408. Опять же, это может быть полезно для подтверждения, что стояночный переключатель не был включен случайно (и на мгновение) и, соответственно, что транспортное средство фактически находится в состоянии парковки. Например, когда рычаг 32 управления проходит через нейтральный диапазон, он может иметь тенденцию задевать или иным образом временно активировать стояночный переключатель 32a, даже если оператор не предполагает состояние парковки. Для того, чтобы избежать нежелательного автоматического повторного центрирования передних колес 14, соответственно может быть полезно определить 402 состояние парковки транспортного средства 10c, только если определено 406, что стояночный переключатель 32a был включен в течение конкретного временного интервала 408 (например, 1,5 секунды или более).
[0151] В некоторых вариантах осуществления, может быть полезно осуществлять автоматическое повторное центрирование без выдерживания заданного временного интервала 408 (или других временных интервалов) для определения 404, 406 ориентации рукоятки управления и включения стояночного переключателя. Например, при снижении мощности транспортного средства (например, понижающего регулирования максимальной эффективной мощности двигателя, гидравлического насоса или другого устройства), при определении 402 любого подходящего указателя состояния парковки, может быть полезно сразу осуществлять автоматическое повторное центрирование. Это может быть целесообразным, например, вследствие того, что может быть более вероятно, что в условиях, приводящих к понижению мощности (например, падение давления масла, избыточная температура охлаждающей жидкости, несовместимые сигналы от связанных устройств, таких как рычаг управления и связанный с ним стояночный переключатель и так далее), транспортное средство сталкивается с рабочими проблемами. В связи с этим, когда у транспортного средства была понижена мощность и идентифицирован запуск подходящего повторного центрирования (например, определенное 406 включение стояночного переключателя), может быть полезно без существенной задержки автоматически повторно центрировать систему рулевого управления (например, без ожидания в течение временного интервала 408).
[0152] Соответственно, в некоторых вариантах осуществления, способ 400 может включать определение 410, находится ли транспортное средство в состоянии пониженного уровня мощности. Затем способ 400 может дополнительно включать определение 402, что транспортное средство находится в состоянии парковки (т.е., что целесообразно автоматическое повторное центрирование колес) на основании определения 410 состояния пониженного уровня мощности транспортного средства. В некоторых вариантах осуществления, определение 410 состояния пониженного уровня мощности может непосредственно вызывать определение 402 состояния парковки. Например, в некоторых вариантах осуществления, система рулевого управления может автоматически повторно центрироваться на основании определения 410, что была понижена мощность соответствующего транспортного средства (или мощность была понижена конкретным образом или относительно конкретной системы).
[0153] В некоторых вариантах осуществления, если определено 410, что мощность транспортного средства в настоящее время понижена, способ 400 может включать определение 402, что транспортное средство находится в состоянии парковки на основании ряда дополнительных показателей, но не требуя для данных показателей отдельной продолжительности времени. Например, когда было определено 410, что мощность транспортного средства была понижена, состояние парковки может определяться 402 немедленно (т.е., не спустя временной интервал 408, отмечавшийся выше) на основании определения 404 ориентации рукоятки управления в нейтральном диапазоне или определения 406 включения стояночного переключателя.
[0154] Для дополнительной поддержки повторного центрирования системы рулевого управления, способ 400 также может включать определение 420 текущей ориентации соответствующего рулевого устройства. Например, что касается транспортного средства 10c, способ 400 может включать определение 420 текущей ориентации поршня 52a рулевого управления. (Следует понимать, что для транспортных средств с рулевыми устройствами, выполненными по другому, может определяться ориентация других деталей). Ориентация поршня 52a может определяться 420 различными способами. Например, в некоторых вариантах осуществления, аналоговый (или другой) датчик, например, датчик 102 (см. ФИГ. 5) может определять перемещение поршня 52a (или перемещение им обусловленное). Затем сигналы, соответствующие данному перемещению, могут быть преобразованы (например, контроллером 58) в значения, отображающие перемещение поршня 52a из ранее определяемого положения, положение поршня 52a относительно другой контрольной ориентации или другой показатель ориентации поршня 52a.
[0155] Затем определенная 420 текущая ориентация рулевого устройства может сравниваться 424 с нейтральной ориентацией рулевого устройства (например, с сигналом или значением, отображающим текущую ориентацию, отнятым от сигнала или значения, отображающего нейтральную ориентацию) для того, чтобы определить, должным ли образом центрировано рулевое устройство. В некоторых вариантах осуществления, как отмечалось выше, нейтральной ориентацией рулевого устройства может быть центрированная ориентация рулевого устройства (например, как и с поршнем 52a). Однако, следует понимать, что возможны другие конфигурации, так что повторное центрирование системы рулевого управления не обязательно может соответствовать физическому центрированию соответствующего рулевого устройства.
[0156] На основании сравнения 424 текущей и нейтральной ориентаций рулевого устройства, рулевое устройство может перемещаться 426 из текущей ориентации в нейтральную ориентацию. В некоторых вариантах осуществления, рулевое устройство может перемещаться 426 на основании гидравлического потока через соответствующий клапанный узел, причем этим потоком можно управлять посредством различных управляющих команд. Что касается транспортного средства 10c, например, контроллер 58 может определять заданной перемещение 426 поршня 52a на основании сравнения 424 текущей и центрированной ориентаций поршня 52a. Затем контроллер 58 может предоставлять управляющие команды в различные клапаны клапанного узла 40a таким образом, что получающийся в результате гидравлический поток через клапанный узел 40a передвигает 426 поршень 52a в направлении центрированной ориентации.
[0157] В некоторых вариантах осуществления, может быть задан диапазон ориентаций 422 рулевого устройства вокруг нейтральной ориентации (например, диапазон расстояний поршня 52a от его центрированной ориентации). Данный определенный диапазон 422 может служить, например, для ограничения зазора зоны нечувствительности для управления рулевым устройством таким образом, что устройство не может перемещаться 426 (или может перемещаться 426 в меньшей степени) для повторного центрирования, когда определено 420, что устройство находится в пределах диапазона 422. В связи с этим, в некоторых вариантах осуществления, способ 200 может включать определение диапазона 422 положений в пределах конкретного расстояния нейтрального положения рулевого устройства (или соответствующей ширины полосы сигналов). Тогда повторное центрирование рулевого управления транспортным средством может осуществляться по другому, в зависимости от определения 420, ориентировано ли в настоящее время рулевое устройство в пределах соответствующего диапазона. Например, если определено 420, что рулевое устройство в настоящее время ориентировано в пределах заданного диапазона 422 вокруг нейтральной ориентации, но в настоящее время не находится в нейтральной ориентации, можно считать, что рулевое устройство находится почти в нейтральной ориентации, так что может быть ненужно существенное дополнительное перемещение 426 рулевого устройства. Соответственно, способ 400 может включать перемещение 426 рулевого устройства только в течение заданного временного интервала 428 (например, относительно короткого временного интервала 428, например, 1 секунду). (Следует понимать, что временной интервал 428 для предоставления 426 управляющей команды может отличаться или может быть таким же, как временной интервал 408 для определения 404, 406 состояния рукоятки управления или стояночного переключателя).
[0158] В отличие от этого, если определено 420, что рулевое устройство в настоящее время ориентировано за пределами заданного диапазона 422 вокруг нейтральной ориентации, рулевое устройство можно должным образом перемещать 426 (например, через управляющие команды, предоставляемые в клапанный узел 40a) до тех пор, пока определенная 420 текущая ориентация не будет достаточно близкой к нейтральной ориентации. Например, первоначальный набор команд в клапанный узел 40a может вызывать перемещение 426 поршня 52a на протяжение продолжительного времени до тех пор, пока датчик (например, датчик 102 на ФИГ. 5) не покажет, что поршень 52a находится в пределах заданного диапазона 422 вокруг центрированной ориентации. Затем последующий набор команд в клапанный узел 40a может вызывать перемещение 426 поршня 52a только в течение ограниченного, дополнительного, заданного временного интервала 428, перед завершением управляющих команд. Подобная стратегия может, например, вызывать перемещение 426 поршня 52a в пределах близкого расстояния от его нейтрального положения, не придавая существенного движения 426 вперед и назад вокруг нейтрального положения (например, как будто система управления «охотится» за нейтральным положением).
[0159] В некоторых вариантах осуществления, соответствующее рулевое устройство может перемещаться последовательно все меньшими шагами 430 (или последовательно с все меньшими усилиями) по мере того, как определяется, что рулевое устройство приближается к нейтральной ориентации. Например, по мере того, как определяется 420, что поршень 52a приближается к своей нейтральной ориентации, контроллер 58 может последовательно предоставлять все меньшие токовые сигналы в различные клапаны клапанного узла 40a таким образом, что поршень 52a последовательно перемещается с все меньшими шагами 430 за счет последовательно все меньших гидравлических потоков по мере того, как поршень 52a приближается к центру. Данное, и аналогичное модулирование движений 426 рулевого устройства может приводить к относительно плавному приближению поршня 52a (или другого соответствующего рулевого устройства) к нейтральной ориентации и менее резкой остановке движения 426 рулевого устройства после достижения должным образом нейтральной ориентации.
[0160] В некоторых вариантах осуществления, различные операции способа 400 могут выполняться повторно для того, чтобы должным образом повторно центрировать систему рулевого управления. Например, после определения 420 текущей ориентации рулевого устройства и, соответственно, перемещения 426 рулевого устройства, новая текущая ориентация рулевого устройства может определяться 420 и сравниваться 424 с нейтральной ориентацией для того, чтобы направлять дальнейшее перемещение 426 рулевого устройства.
[0161] В некоторых вариантах осуществления, способ 400 может включать остановку 444 управления рулением (например, остановку 444 автоматическое перемещения 426 рулевого устройства) или выключение 444 двигателя, если выявляется обратное преобразование управляющих команд (например, что может произойти, если гидравлические линии непреднамеренно рассоединяются). В связи с этим, способ 400 может включать определение 440 заданного направления перемещения 426 рулевого устройства. Заданное направление перемещения может определяться 440, например, на основании управляющей команды, определенной контроллером для перемещения 426 рулевого устройства. Затем определенное 440 заданное направление перемещения может сравниваться 442 с фактическим направлением перемещения для того, чтобы определить, соответствует ли фактическое направление перемещения определяемому 440 заданному направлению. Что касается транспортного средства 10c, например, перемещение поршня 52a, определяемое датчиком 102, может сравниваться с заданным перемещением, определенным 440 контроллером 58. Если заданное и фактическое перемещения не совпадают (например, происходят в противоположных направлениях в течение по меньшей мере отдельного временного интервала), управление рулением может останавливаться 444, и двигатель может автоматически выключаться 444.
[0162] В некоторых вариантах осуществления, способ 400 также может с пользой направлять ручное повторное центрирование различных систем рулевого управления. Это может быть полезным, например, если двигатель транспортного средства остановлен (намеренно или иным образом) перед тем, как может быть завершено автоматическое повторное центрирование системы рулевого управления. Соответственно, также со ссылкой на ФИГ. 10, способ 400 может включать определение 446 условия останова двигателя соответствующего транспортного средства. Останов двигателя может определяться 446 различными известными способами, включая посредством одного или более датчиков (не показано). Затем способ 400 может включать определение 448, было ли перемещено 426 соответствующее рулевое устройство в ориентацию, которая находится внутри подходящего диапазона относительно нейтральной ориентации (например, перемещено 426 из нейтральной ориентации в пределах конкретного расстояния). В некоторых вариантах осуществления, данный определенный 448 диапазон может включать ориентации рулевого устройства, которые находятся за пределами диапазона 422.
[0163] Если определено 448, что рулевое устройство не было перемещено из нейтральной ориентации в пределах подходящего расстояния, можно считать, что рулевое устройство расположено не с нейтральной ориентацией (т.е., ориентацией нулевого управления). По разным причинам, может быть полезно предотвратить повторный запуск двигателя (и соответствующего приведения в действие привода рулевого управления) до тех пор, пока рулевое устройство не продвинется дальше таким образом, что двигатель может быть повторно запущен, только если система рулевого управления находится в состоянии нулевого управления, а всякое неожиданное перемещение транспортного средства при повторном запуске двигателя может происходить в прямолинейном направлении. Соответственно, при идентификации 450 ввода повторного запуска для повторного запуска двигателя (например, поворота ключа в «пусковое» положение), способ 400 может включать, перед повторным запуском двигателя, выдачи 452 оператору указания для ручного ввода оператором в устройство ввода руления. Что касается транспортного средства 10c, например, контроллер 58 может определить 448, что поршень 52a не был должным образом повторно центрирован перед тем, как был выключен двигатель транспортного средства 10c. При идентификации 450 ввода повторного запуска для транспортного средства 10c (например, поворота соответствующего ключа на «запуск»), фактический повторный запуск двигателя может быть отложен до тех пор, пока система рулевого управления не будет должным образом повторно центрирована.
[0164] В некоторых вариантах осуществления, способ 200 может определять 440 заданное направление перемещения для поршня 52a (т.е., для повторного центрирования рулевого устройства 52) и может предоставлять 452 указатель, направляющий предоставление оператором конкретного ручного ввода руления. Например, контроллер 58 может обеспечивать 452 указатель (например, стрелку или анимационное рулевое колесо) на устройстве отображения (не показано) в транспортном средстве 10c, который может указывать, в каком направлении оператор должен поворачивать рулевое колесо 26. По мере того, как оператор поворачивает рулевое колесо 26 (например, в соответствии с предоставленным 452 указателем), текущая ориентация рулевого устройства может определяться 420 и сравниваться 424 с нейтральной ориентацией. Затем может предоставляться 452 обновленный указатель, который подходит для дальнейшего ручного рулевого управления. После того, как было определено 454, что рулевое устройство было перемещено в ориентацию в пределах диапазона ориентаций вокруг нейтральной ориентации, можно считать, что рулевое устройство повторно центрировано должным образом, а двигатель 36 может быть повторно запущен 456. В некоторых вариантах осуществления, приемлемый диапазон ориентаций для рулевого устройства может быть больше для ручного повторного центрирования (например, которое направляется предоставленными 452 указателями), чем для полностью автоматического повторного центрирования (например, которое осуществляется посредством команд в клапанный узел 40a). Например, может быть определено, что рулевое устройство должным образом повторно центрировано, после операции ручного повторного центрирования, если определено 454, что рулевое устройство находится внутри конкретного диапазона ориентаций, который может быть более большим диапазоном, чем диапазон 422 для автоматического повторного центрирования рулевого устройства. Это может, например, обеспечивать возможность ручного повторного центрирования рулевого устройства, которое направляется за счет предоставления 452 указателей, не требуя от оператора ориентирования рулевого устройства с такой же точностью, как при автоматическом повторном центрировании.
[0165] Снова со ссылкой на ФИГ. 5, в некоторых вариантах осуществления, может быть полезно предоставить клапан включения-выключения или другой клапан для предотвращения влияния на гидравлический поток из ручного клапана 28 операции автоматического повторного центрирования (например, перемещения 426 поршня 52a на основании различных автоматических определений 402, 404, 406, 410, 420, и так далее). Как изображено на ФИГ. 5, клапан 106 включения-выключения расположен в клапанном узле 40a для того, чтобы избирательно управлять работой клапана 40a (и других устройств). В некоторых вариантах осуществления, аналогичный (или другой) клапан включения-выключения (не показано) может располагаться в каждой из гидравлических линий 104 между ручным клапаном 28 рулевого управления и поршнем 52a. Когда поршень 52a автоматически перемещается 426 во время автоматического повторного центрирования системы рулевого управления передними колесами, два клапана (не показано) на линии 104 могут выключаться (или закрываться иным образом), так чтобы поток из клапана 28 в поршень 52a не мог проходить.
[0166] Специалисту в данной области техники следует понимать, что некоторые аспекты раскрытого объекта изобретения могут быть реализованы в виде способа, системы (например, системы управления рабочего транспортного средства, содержащейся в различных транспортных средствах 10), или компьютерного программного продукта. Соответственно, некоторые варианты осуществления могут быть полностью реализованы в виде аппаратного обеспечения, полностью в виде программного обеспечения (включая встроенные программы, резидентное программное обеспечение, набор микрокоманд и т.д). Или в виде комбинации программного обеспечения и аппаратного обеспечения (и других) аспектов. Кроме того, некоторые варианты осуществления могут принимать форму компьютерного программного продукта на используемой на компьютере среде для хранения информации, имеющей используемый на компьютере программный код, реализованный в среде.
[0167] Может использоваться любая подходящая используемая на компьютере или машиночитаемая среда. Используемой на компьютере средой может быть среда с машиночитаемым сигналом или машиночитаемая среда для хранения. Используемой на компьютере, или машиночитаемой, средой для хранения (включая устройство хранения, связанное с вычислительным устройством или клиентским электронным устройством) может быть, например, но без ограничения, электронная, магнитная, оптическая, электромагнитная, инфракрасная или полупроводниковая система, аппарат или устройство, или любая подходящая комбинация изложенного выше. Более конкретные примеры (неисчерпывающий список) машиночитаемой среды будут включать следующее: электрическое соединение, имеющее один или более проводов, дискету для портативного компьютера, жесткий диск, оперативное запоминающее устройство (ОЗУ), постоянно запоминающее устройство (ПЗУ), стираемое программируемое постоянно запоминающее устройство (СППЗУ или флэш-память), оптическое волокно, постоянно запоминающее устройство на портативных компактных дисках (КД-ПЗУ), оптическое устройство хранения. В контексте данного документа, используемой на компьютере, или машиночитаемой, средой для хранения может быть любой материальный носитель, который может содержать или хранить программу для применения посредством системы, аппарата или устройства выполнения команд или во взаимодействии с ними.
[0168] Среда с машиночитаемым сигналом может включать распространяющийся информационный сигнал с заключенным в нем машиночитаемым программным кодом, например, в основной полосе частот или в виде части несущей волны. Подобный распространяющийся сигнал может принимать любую из множества форм, включая, но без ограничения, электромагнитный, оптический или любую подходящую их комбинацию. Среда с машиночитаемым сигналом может быть энергонезависимой и может представлять собой любую машиночитаемую среду, которая не является машиночитаемой средой для хранения и которая может передавать, распространять, или транспортировать программу для применения посредством системы, аппарата или устройства выполнения команд или во взаимодействии с ними.
[0169] Аспекты некоторых вариантов осуществления описаны в данной заявке со ссылкой на иллюстрации технологической схемы и/или блок-схемы способов, аппарата (систем) и компьютерных программных продуктов согласно вариантам осуществления изобретения. Следует понимать, что каждый блок любых иллюстраций технологической схемы и/или блок-схем, и комбинации блоков на иллюстрациях технологической схемы и/или блок-схем, могут быть реализованы посредством команд компьютерной программы. Данные команды компьютерной программы могут предоставляться в процессор компьютера общего назначения, компьютера специального назначения или другого программируемого устройства для обработки данных для создания такой машины, что команды, которые выполняются посредством процессора компьютера или другого программируемого устройства для обработки данных, создают средство для осуществления функций/действий, указанных в блоке или блоках технологической схемы и/или блок-схем.
[0170] Данные команды компьютерной программы также могут храниться в машиночитаемой памяти, которая может направлять компьютер или другое программируемое устройство для обработки данных для функционирования конкретным образом, так что команды, хранящиеся в машиночитаемой памяти, создают готовое изделие, содержащие команды, которые осуществляют функцию/действие, указанное в блоке или блоках технологической схемы и/или блок-схем.
[0171] Команды компьютерной программы также могут загружаться в компьютер или другое программируемое устройство для обработки данных, вызывая последовательности рабочих стадий для выполнения на компьютере или другом программируемом устройстве для создания выполняемого на компьютере процесса таким образом, что команды, которые выполняются на компьютере или другом программируемом устройстве, предоставляют стадии для осуществления функций/действий, указанных в блоке или блоках технологической схемы и/или блок-схем.
[0172] Технологическая схема и/или блок-схемы на фигурах иллюстрируют архитектуру, функции и работу возможных вариантов выполнения систем, способов и компьютерных программных продуктов согласно различным вариантам осуществления представленного раскрытия. В связи с этим, каждый блок на технологической схеме или блок-схемах может отображать модуль, сегмент или часть кода, который содержит одну или более выполняемых команд для осуществления специфической логической функции (функций). Также необходимо заметить, что в некоторых альтернативных вариантах выполнения, функции, записанные в блоке, могут встречаться не в порядке, записанном на фигурах. Например, два блока, показанных последовательно, фактически могут выполняться по существу одновременно, или блоки иногда могут выполняться в обратном порядке, в зависимости от включенной функции. Также необходимо заметить, что каждый блок блок-схемы и/или иллюстрации технологической схемы, и комбинации блоков на блок-схемах и/или иллюстрации технологической схемы, может быть осуществлен посредством системы специального назначения на основе аппаратных средств, которая выполняет специфические функции или действия, или комбинаций аппаратного обеспечения специального назначения и компьютерных команд.
[0173] Терминология, используемая в данной заявке, предназначена только для цели описания конкретных вариантов осуществления и не предполагает ограничения раскрытия. Как использовано в данной заявке, единичные формы предполагают включение также множественных форм, если контекст ясно не показывает иное. Кроме того, необходимо понимать, что термины «содержит» и/или «содержащий» при использовании в данном описании, указывают на наличие изложенных признаков, чисел, стадий, операций, элементов и/или компонентов, но не исключают присутствие или добавление одного или более других признаков, чисел, стадий, операций, элементов и/или компонентов и/или их групп.
[0174] Описание представленного изобретения представлено для иллюстрирования и описания, и оно не является исчерпывающим или ограничивающим изобретение раскрытой формой. Специалистам в данной области техники будет очевидно множество модификаций и вариантов, не выходящих за рамки объема правовых притязаний и сущности изобретения. Конкретные ссылки на варианты осуществления в данной заявке были выбраны и описаны для того, чтобы лучше всего объяснить принципы изобретения и его практическое применение, и чтобы позволить другим специалистам в данной области техники понять изобретение и узнать множество альтернатив, модификаций и вариантов к описанному примеру (примерам). Соответственно, различные варианты осуществления и варианты выполнения, отличающиеся от явно описанных вариантов, находятся в пределах объема правовых притязаний следующей формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАКТОРА С РОБОТИЗИРОВАННОЙ МЕХАНИЧЕСКОЙ КОРОБКОЙ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2021 |
|
RU2771704C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2587317C1 |
| САМОХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2651528C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗОВ И ЛЮДЕЙ ПО ЛЕСТНИЦАМ И ПЛОСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2538408C1 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ С ПРИЦЕПОМ | 2015 |
|
RU2608786C2 |
| РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2015 |
|
RU2668771C2 |
| УЗЕЛ ДАТЧИКА УГЛА СЦЕПКИ | 2015 |
|
RU2613123C2 |
| УСТРОЙСТВО И СПОСОБ ВОСПРИЯТИЯ ПОЛОЖЕНИЯ, КОРРЕКЦИИ И ИЗМЕНЕНИЯ РЕЖИМА В СИСТЕМЕ РУЛЕВОГО УПРАВЛЕНИЯ НЕСКОЛЬКИМИ МОСТАМИ | 2018 |
|
RU2756857C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ СИСТЕМЫ ГИДРАВЛИЧЕСКОГО ПРИВОДА (ВАРИАНТЫ) | 2017 |
|
RU2735754C2 |
| РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2017 |
|
RU2719047C1 |
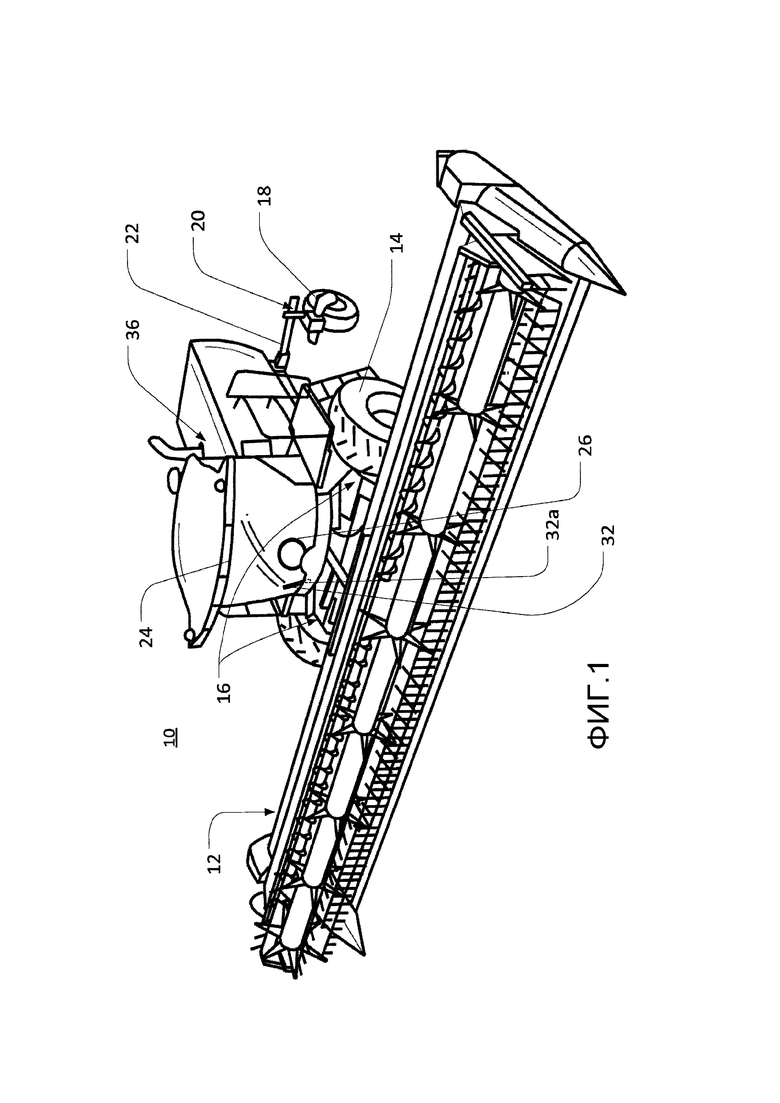
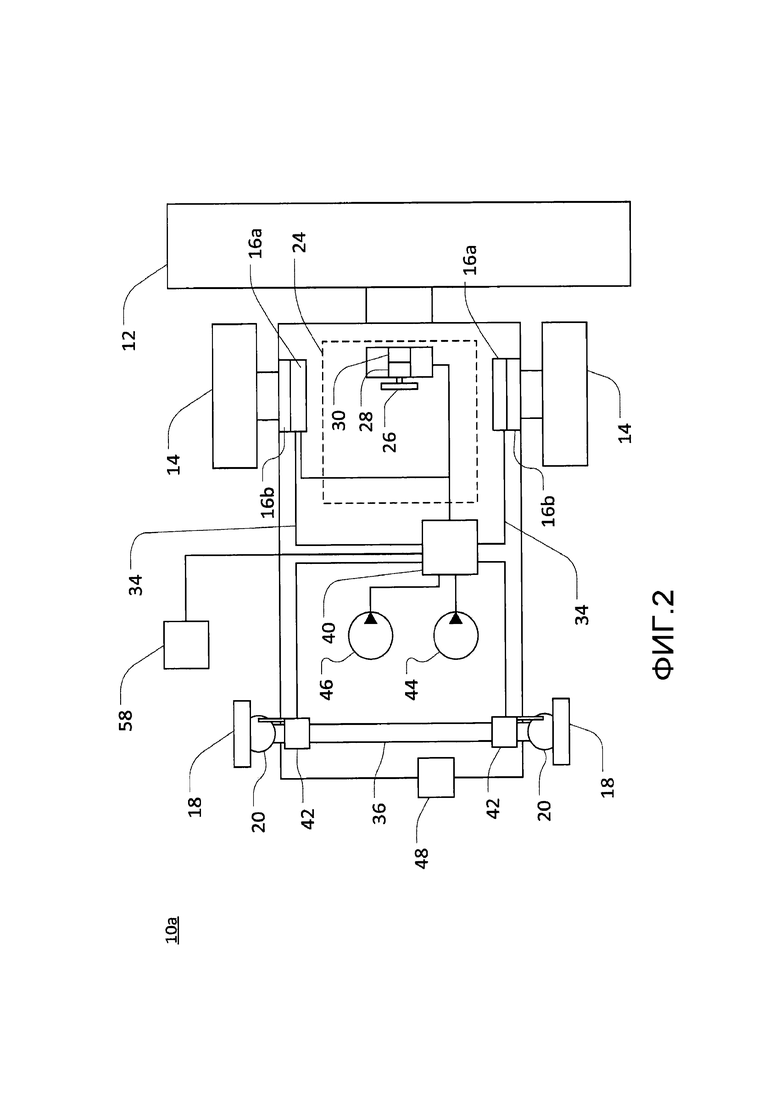

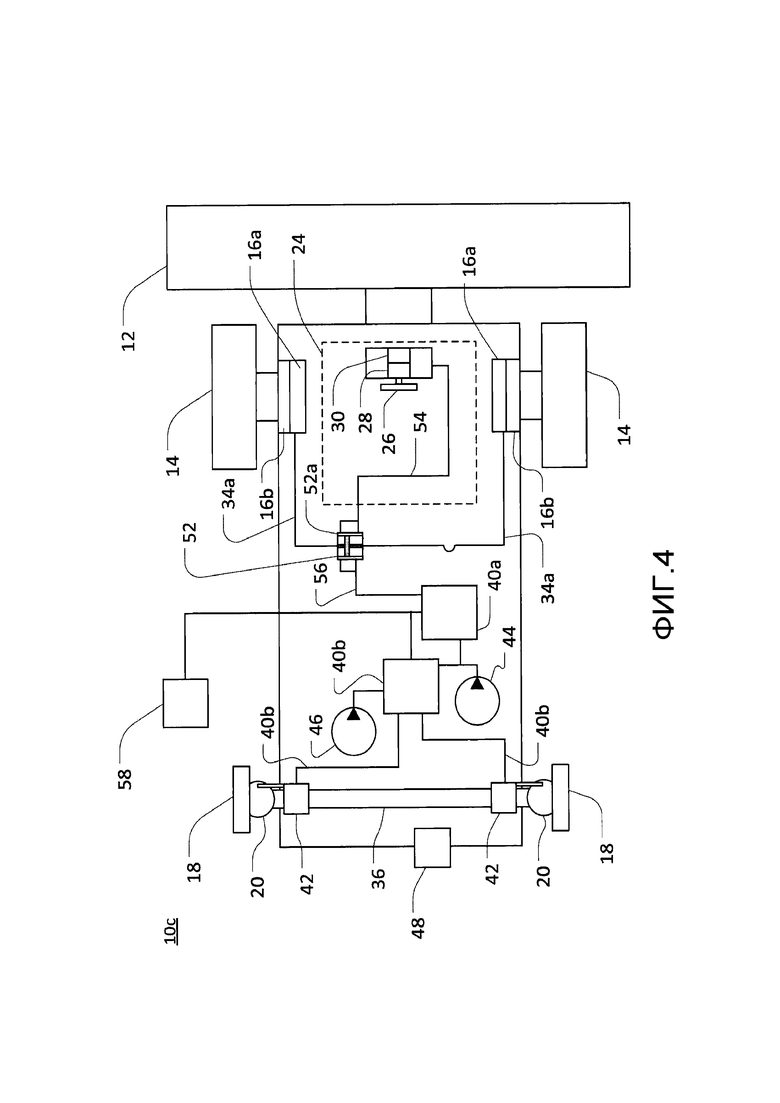
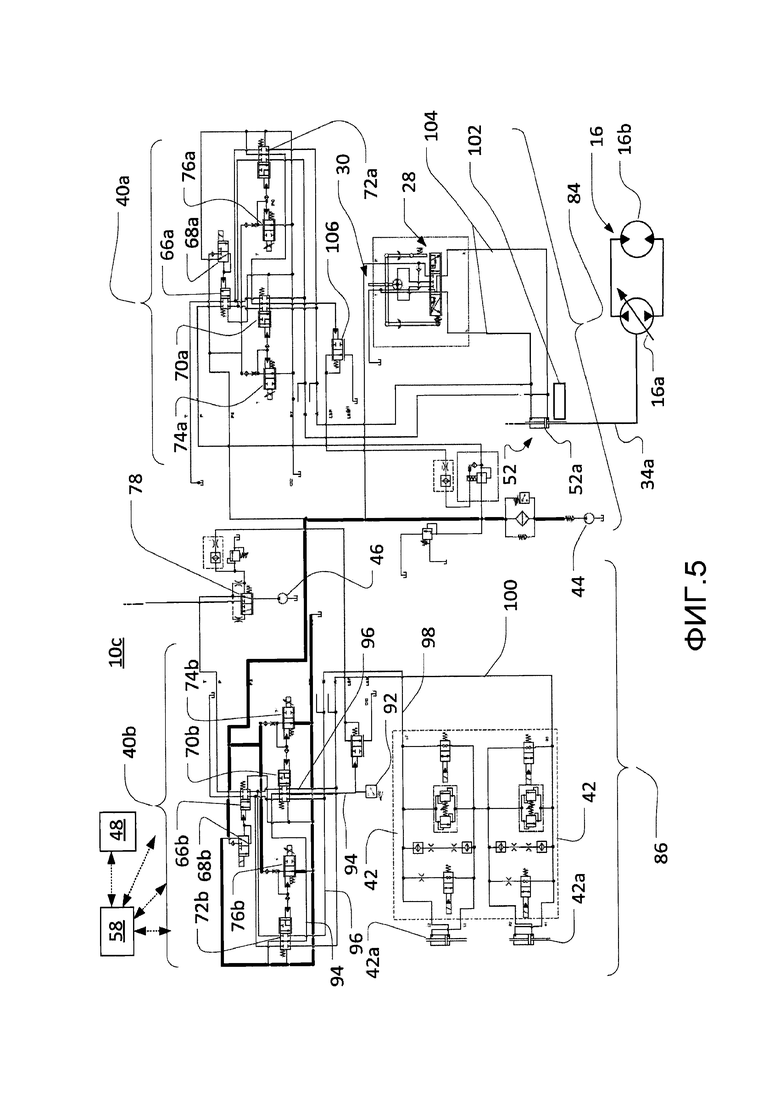
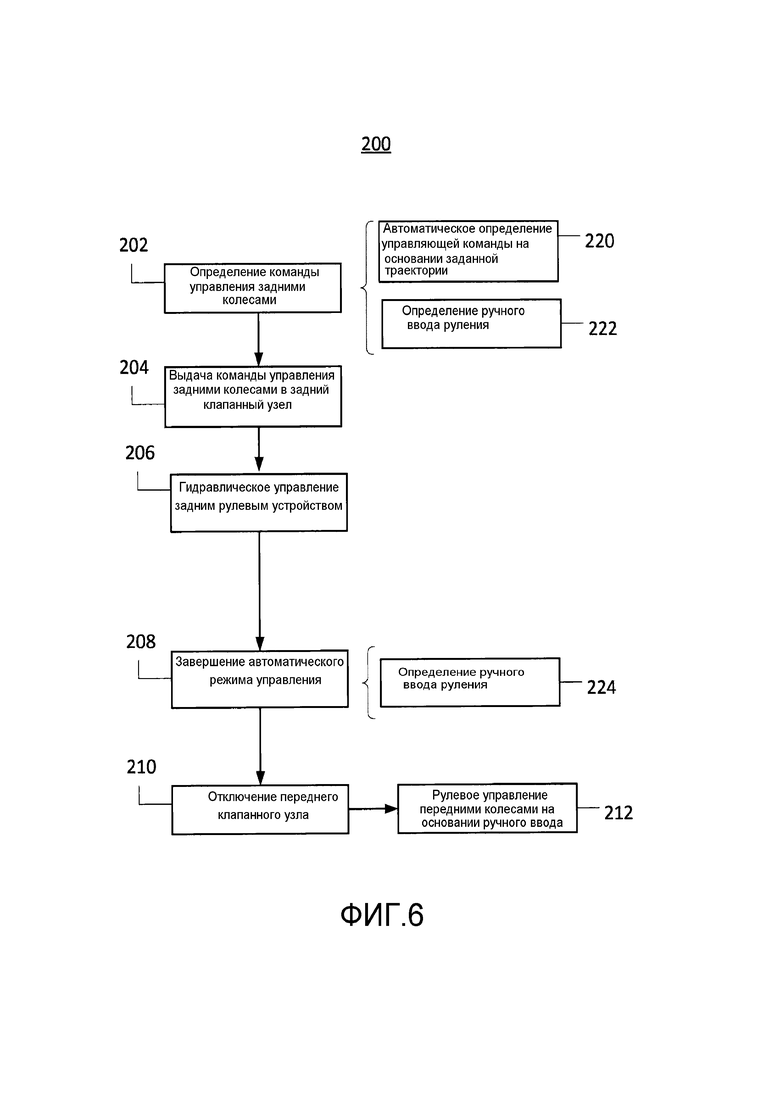


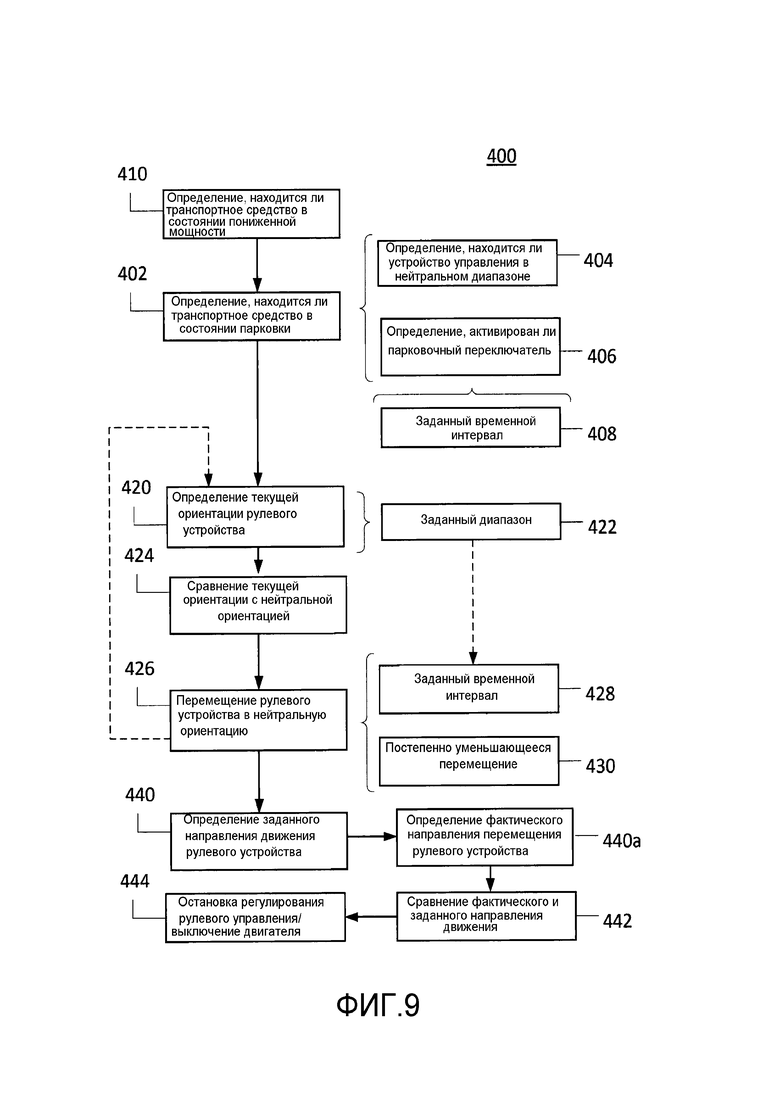

Изобретение относится к рулевому управлению транспортными средствами. Способ управления рулением включает определение, находится ли сельскохозяйственное транспортное средство в состоянии парковки, определение текущей ориентации рулевого устройства, сравнение текущей ориентации рулевого устройства с нейтральной ориентацией гидравлического рулевого устройства. Система рулевого управления содержит клапанный узел, датчик, выполненный с возможностью определения текущей ориентации гидравлического рулевого устройства, и контроллер, выполненный с возможностью: определения, находится ли сельскохозяйственное транспортное средство в состоянии парковки, определения текущей ориентации гидравлического рулевого устройства, сравнения текущей ориентации гидравлического рулевого устройства с нейтральной ориентацией гидравлического рулевого устройства, при определении того, что сельскохозяйственное транспортное средство находится в состоянии парковки, и в сравнении текущей и нейтральной ориентаций гидравлического рулевого устройства, регулирования клапанного узла для того, чтобы перемещать гидравлическое рулевое устройство из текущей ориентации в нейтральную ориентацию. Достигается точное рулевое управление сельскохозяйственным транспортным средством. 2 н. и 18 з.п. ф-лы, 10 ил.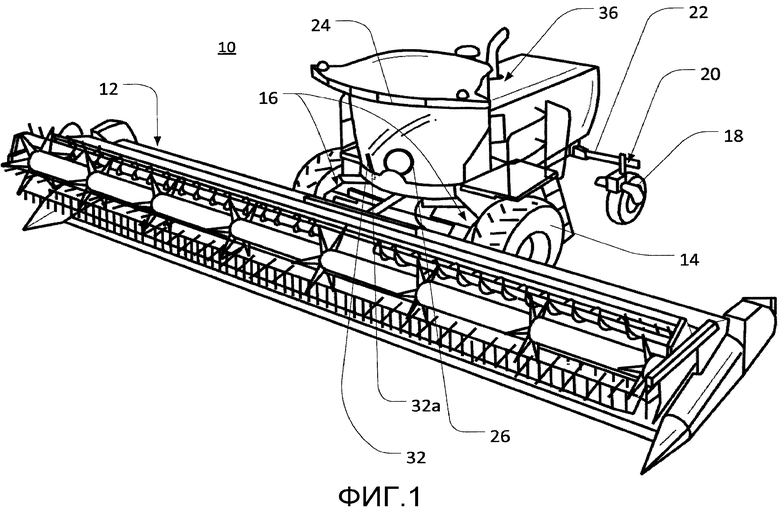
1. Способ управления рулением сельскохозяйственного транспортного средства, имеющего двигатель, одно или более управляемых колес, устройство ввода руления, выполненное с возможностью приема ручного ввода руления для одного или более управляемых колес, и рулевое устройство, соединенное по меньшей мере с одним или более управляемых колес, при этом способ управления рулением включает:
определение посредством одного или более вычислительных устройств, находится ли сельскохозяйственное транспортное средство в состоянии парковки;
определение посредством одного или более вычислительных устройств текущей ориентации рулевого устройства;
сравнение посредством одного или более вычислительных устройств текущей ориентации рулевого устройства с нейтральной ориентацией рулевого устройства; и
на основании определения, что сельскохозяйственное транспортное средство находится в состоянии парковки, и сравнения текущей и нейтральной ориентаций рулевого устройства, перемещение рулевого устройства из текущей ориентации в нейтральную ориентацию.
2. Способ управления рулением по п. 1, в котором определение, находится ли сельскохозяйственное транспортное средство в состоянии парковки, включает:
определение, находится ли устройство управления для перемещения сельскохозяйственного транспортного средства в пределах нейтрального диапазона в течение заданного временного интервала; и
определение, активирован ли стояночный переключатель в течение заданного временного интервала; и
при этом определяют, что сельскохозяйственное транспортное средство находится в состоянии парковки, если определено, что устройство управления находится в пределах нейтрального диапазона в течение заданного временного интервала, и определено, что стояночный переключатель активирован устройством управления в течение заданного временного интервала.
3. Способ управления рулением по п. 1, в котором определение, находится ли сельскохозяйственное транспортное средство в состоянии парковки, основано на определении, находится ли сельскохозяйственное транспортное средство в настоящее время в состоянии пониженного уровня мощности.
4. Способ управления рулением по п. 1, дополнительно включающий:
определение, находится ли текущая ориентация рулевого устройства в пределах заданного диапазона ориентаций относительно нейтральной ориентации; и,
если определено, что текущая ориентация не находится в пределах заданного диапазона ориентаций, перемещение рулевого устройства в нейтральную ориентацию.
5. Способ управления рулением по п. 1, дополнительно включающий:
определение, находится ли текущая ориентация рулевого устройства в пределах заданного диапазона ориентаций относительно нейтральной ориентации; и
если определено, что текущая ориентация находится в пределах заданного диапазона ориентаций, выдачу управляющей команды для перемещения рулевого устройства в течение заданного временного интервала.
6. Способ управления рулением по п. 1, дополнительно включающий
перемещение рулевого устройства последовательно все меньшими шагами при приближении рулевого устройства к нейтральной ориентации.
7. Способ управления рулением по п. 1, дополнительно включающий:
определение заданного направления перемещения рулевого устройства, на основании управляющей команды от контроллера;
определение фактического направления перемещения рулевого устройства;
сравнение фактического направления перемещения с заданным направлением перемещения; и,
если фактическое направление перемещения не такое же, как заданное направление перемещения в течение заданного временного интервала, одно или более из: прекращение управления рулевым устройством и выключение двигателя.
8. Способ управления рулением по п. 1, в котором рулевое устройство содержит гидравлический поршень, выполненный с возможностью перемещения между различными ориентациями для того, чтобы управлять одним или более гидравлическими насосами и тем самым рулить по меньшей мере одним управляемым колесом,
при этом определение текущей ориентации рулевого устройства включает получение сигнала от датчика положения, выполненного с возможностью определения текущей ориентации гидравлического поршня.
9. Способ управления рулением по п. 1, дополнительно включающий:
определение условия останова двигателя сельскохозяйственного транспортного средства;
определение, что рулевое устройство не было перемещено в ориентацию в пределах первого заданного диапазона ориентаций относительно нейтральной ориентации, перед достижением двигателем условия останова;
идентификацию ввода повторного запуска для повторного запуска двигателя;
после идентификации ввода повторного запуска, предоставление оператору индикации для направления оператором ручного ввода руления в устройстве ввода руления таким образом, чтобы переместить рулевое устройство в нейтральную ориентацию; и
повторный запуск двигателя по меньшей мере частично на основании определения, что ручной ввод руления переместило рулевое устройство в ориентацию в пределах второго заданного диапазона ориентаций относительно нейтральной ориентации.
10. Способ управления рулением по п. 1, в котором рулевое устройство перемещается гидравлическим потоком через клапанный узел, при этом клапанный узел содержит:
первый и второй главные золотниковые клапаны, расположенные параллельно между насосом и рулевым устройством, при этом первый и второй главные золотниковые клапаны регулируются первым и вторым управляющими клапанами, соответственно; и
блокировочный клапан, расположенный между насосом и первым и вторым главными золотниковыми клапанами, при этом блокировочный клапан выполнен с возможностью блокировки потока из насоса в первый и второй главные золотниковые клапаны для отключения клапанного узла.
11. Система рулевого управления для сельскохозяйственного транспортного средства, имеющего двигатель, одно или более управляемых колес и устройство ввода руления, выполненное с возможностью приема ручного ввода руления для одного или более управляемых колес, при этом система рулевого управления содержит:
гидравлическое рулевое устройство, соединенное по меньшей мере с одним или более управляемых колес;
клапанный узел, выполненный с возможностью гидравлического управления гидравлическим рулевым устройством для того, чтобы рулить по меньшей мере одним управляемым колесом;
датчик, выполненный с возможностью определения текущей ориентации гидравлического рулевого устройства; и
контроллер, выполненный с возможностью:
определения, находится ли сельскохозяйственное транспортное средство в состоянии парковки;
определения текущей ориентации гидравлического рулевого устройства на основании информации от датчика;
сравнения текущей ориентации гидравлического рулевого устройства с нейтральной ориентацией гидравлического рулевого устройства; и
на основании определения, что сельскохозяйственное транспортное средство находится в состоянии парковки, и сравнения текущей и нейтральной ориентаций гидравлического рулевого устройства, регулирования клапанного узла для того, чтобы перемещать гидравлическое рулевое устройство из текущей ориентации в нейтральную ориентацию.
12. Система рулевого управления по п. 11, в которой определение, находится ли сельскохозяйственное транспортное средство в состоянии парковки, включает:
определение, находится ли устройство управления для гидравлического привода для одного или более управляемых колес в пределах нейтрального диапазона в течение заданного временного интервала; и
определение, активирован ли стояночный переключатель устройством управления в течение заданного временного интервала;
при этом определяют, что сельскохозяйственное транспортное средство находится в состоянии парковки, если определено, что устройство управления находится в пределах нейтрального диапазона в течение заданного временного интервала, и определено, что стояночный переключатель активирован устройством управления в течение заданного временного интервала.
13. Система рулевого управления по п. 11, в которой определение, находится ли сельскохозяйственное транспортное средство в состоянии парковки, по меньшей мере частично основано на определении, находится ли сельскохозяйственное транспортное средство в настоящее время в состоянии пониженного уровня мощности.
14. Система рулевого управления по п. 11, в которой контроллер дополнительно выполнен с возможностью:
определения, находится ли текущая ориентация гидравлического рулевого устройства в пределах заданного диапазона ориентаций относительно нейтральной ориентации; и,
если определено, что текущая ориентация не находится в пределах заданного диапазона ориентаций, выдачи в клапанный узел управляющей команды для перемещения гидравлического рулевого устройства в нейтральную ориентацию.
15. Система рулевого управления по п. 11, в которой контроллер дополнительно выполнен с возможностью:
определения, находится ли текущая ориентация гидравлического рулевого устройства в пределах заданного диапазона ориентаций относительно нейтральной ориентации; и,
если определено, что текущая ориентация находится в пределах заданного диапазона ориентаций, выдачи в клапанный узел управляющей команды в течение заданного временного интервала.
16. Система рулевого управления по п. 11, в которой
управление клапанным узлом включает выдачу в клапанный узел последовательно все более маленьких управляющих команд по мере того, как гидравлическое рулевое устройство приближается к нейтральной ориентации.
17. Система рулевого управления по п. 11, в которой контроллер дополнительно выполнен с возможностью:
определения на основании управления клапанным узлом заданного направления перемещения гидравлического рулевого устройства;
определения фактического направления перемещения гидравлического рулевого устройства;
сравнения фактического направления перемещения с заданным направлением перемещения; и,
если фактическое направление перемещения не такое же, как заданное направление перемещения в течение заданного временного интервала, одного или более из: прекращения управления клапанным узлом и выключения двигателя.
18. Система рулевого управления по п. 11, дополнительно содержащая
датчик положения,
при этом гидравлическое рулевое устройство содержит гидравлический поршень, выполненный с возможностью перемещения между различными ориентациями для того, чтобы управлять одним или более гидравлическими насосами и тем самым рулить по меньшей мере одним управляемым колесом;
при этом датчик положения выполнен с возможностью определения текущей ориентации гидравлического поршня; и
причем определение текущей ориентации гидравлического рулевого устройства включает получение от датчика положения индикации текущей ориентации гидравлического поршня.
19. Система рулевого управления по п. 11, в которой контроллер дополнительно выполнен с возможностью:
определения условия останова двигателя сельскохозяйственного транспортного средства;
определения, что гидравлическое рулевое устройство не было перемещено в ориентацию в пределах первого заданного диапазона ориентаций относительно нейтральной ориентации перед достижением двигателем условия останова;
идентификации ввода повторного запуска для повторного запуска двигателя;
после идентификации ввода повторного запуска, предоставления оператору индикации для направления оператором ручного ввода руления в устройстве ввода руления таким образом, чтобы переместить рулевое устройство в нейтральную ориентацию; и
выдачи команды повторного запуска двигателя по меньшей мере частично на основании определения, что приложение ручного ввода руления переместило гидравлическое рулевое устройство в ориентацию в пределах второго заданного диапазона ориентаций относительно нейтральной ориентации.
20. Система рулевого управления по п. 11, в которой клапанный узел содержит:
первый и второй главные золотниковые клапаны, расположенные параллельно между насосом и гидравлическим рулевым устройством, при этом первый и второй главные золотниковые клапаны регулируются первым и вторым управляющими клапанами соответственно; и
блокировочный клапан, расположенный между насосом и первым и вторым главными золотниковыми клапанами, при этом блокировочный клапан выполнен с возможностью блокировки потока из насоса в первый и второй главные золотниковые клапаны для отключения клапанного узла.
| US 8666601 B1, 04.03.2014 | |||
| US 2002026270 A1, 28.02.2002 | |||
| US 6050359 A, 18.04.2000. |

