Изобретение относится к области океанологии и может найти применение при контроле гидрологических процессов на морской поверхности, обнаружении течений и загрязнений морской поверхности.
Различные явления, в том числе обусловленные внутренними волнами, турбулентностью, антропогенными воздействиями на водную среду, приводят к деформациям пространственной структуры морского волнения (пространственно-частотных спектров морского волнения), в частности, к появлению аномальных зон с повышенной и пониженной дисперсией уклонов морской поверхности, которые могут быть обнаружены как на оптических, так и на радиолокационных изображениях дистанционного зондирования [см., например, Бондур В.Г. Аэрокосмические методы в современной океанологии. / В кн. «Новые идеи в океанологии. М.: Наука. Т1: Физика. Химия. Биология / 2004. С. 55 - 117+8 стр. цв. вклеек].
Для обнаружения аномалий подстилающей поверхности при дистанционном зондировании используют различные методы и средства.
Известен «Способ экологического зондирования территории», Патент RU №2132606, A.01.G, 15/00 G.01.W, 1/00 - аналог.
Способ-аналог включает получение спектрозональных снимков региона, содержащих контрольные промышленные площадки, в G, R диапазонах, преобразование аналоговых значений спектральной яркости I(x, y) в цифровые матрицы изображений, размерностью |m×n| элементов, проведение поэлементной логической сортировки пикселей в матрицах в соответствии с алгоритмом, если R>G, то R, если R<G, то R=Rmax-k·G, где k - коэффициент корреляции хроматических коэффициентов r, g, получают результирующую матрицу тех же размеров, осуществляют привязку изображения к географическим координатам, задают требуемый уровень градаций зонирования, выделяют алгоритмами пространственного дифференцирования контуры пограничных зон, вычисляют площади зон с максимальным уровнем результирующего вектора техногенных нагрузок, рассчитывают числовые характеристики электрического сигнала результирующей матрицы: математическое ожидание, дисперсию, огибающую пространственного спектра, автокорреляционную функцию, гистограмму распределения пикселей по яркости, осуществляют привязку относительного закона распределения пикселей к абсолютным значениям результирующего вектора техногенных нагрузок по его максимальным значениям и соответствующих максимальным значениям площади выделенных зон.
К недостаткам способа-аналога следует отнести:
- невозможность непосредственного использования из-за различия средств зондирования и измеряемых параметров;
- недостаточная достоверность результата, вследствие использования одного вида сигнала - коэффициента спектральной яркости (КСЯ) подстилающей поверхности.
Ближайшим аналогом по технической сущности к заявленному является «Способ обнаружения аномалий морской поверхности», Патент RU №2109304, G.01.S, 11/06, 13/89, 2008 г.
Способ ближайшего аналога включает получение изображения морской поверхности в виде матрицы цифровых отсчетов |m×n| элементов функции яркости I(x, y) от пространственных координат, обработку матрицы путем разбиения изображения на мозаику фрактальных участков, вычисление огибающей пространственного спектра и автокорреляционной функции сигнала каждого участка, расчет интегрального признака z=R/B и сравнение его с фоновым z0=R0/B0, вывод на отображение участков, для которых z/z0>2, синтезирование из последовательности проанализированных участков мозаичной картины аномалии, где В, B0 - максимальные значения автокорреляционных функций электрического сигнала матриц аномалии и фона соответственно, R, R0 - ширина автокорреляционных функций на уровне 0,1 их максимального значения для аномалии и фона.
Недостатками способа ближайшего аналога является:
- недостаточная достоверность результата из-за использования при зондировании одного вида сигнала - отраженного от поверхности светового потока;
- невозможность непосредственного использования из-за различия средств зондирования.
Задача, решаемая заявленным способом, состоит в достоверном выделении аномальных зон на морской поверхности путем комплексирования двух сигналов: отраженного от поверхности светового потока и радиосигнала зондирования автодинного излучателя СВЧ.
Поставленная задача решается тем, что способ определения загрязнения морской поверхности включает выбор трасс, содержащих тестовые участки, для дистанционного зондирования с авиационного носителя автодинным радиоволновым измерителем, частотное детектирование сигнала измерителя и создание базы эталонных сигналов ветрового волнения поверхности в виде их автокорреляционных функций, одновременное получение видеоизображений участков по трассе полета цифровой, соосно установленной, видеокамерой высокого пространственного разрешения с привязкой получаемых кадров к топографическим координатам посредством навигатора системы GPS, восстановление пространственного спектра волнения методом Фурье-преобразования изображения видеокадров, вычисление взаимной корреляционной функции сигнала автодинного измерителя и видеокамеры, расчет индекса загрязнения участков через отношение ширины взаимной корреляционной функции к ширине эталонной автокорреляционной функции на уровне 0,1 от их максимального значения, формирование массива данных из этих отношений, выделение, методами пространственного дифференцирования, изолиний контуров индекса загрязнений с нанесением их на контурную карту акватории.
Изобретение поясняется чертежами, где:
фиг. 1 - модуляционная характеристика автодинного излучателя в режиме затягивания частоты;
фиг. 2 - спектр волновой ряби, измеренный в лабораторных условиях а) тестовый участок, б) аномальный участок;
фиг. 3 - спектр ветрового волнения морской поверхности, восстановленный преобразованием Фурье видеоизображения а) тестовый участок, б) аномальный участок;
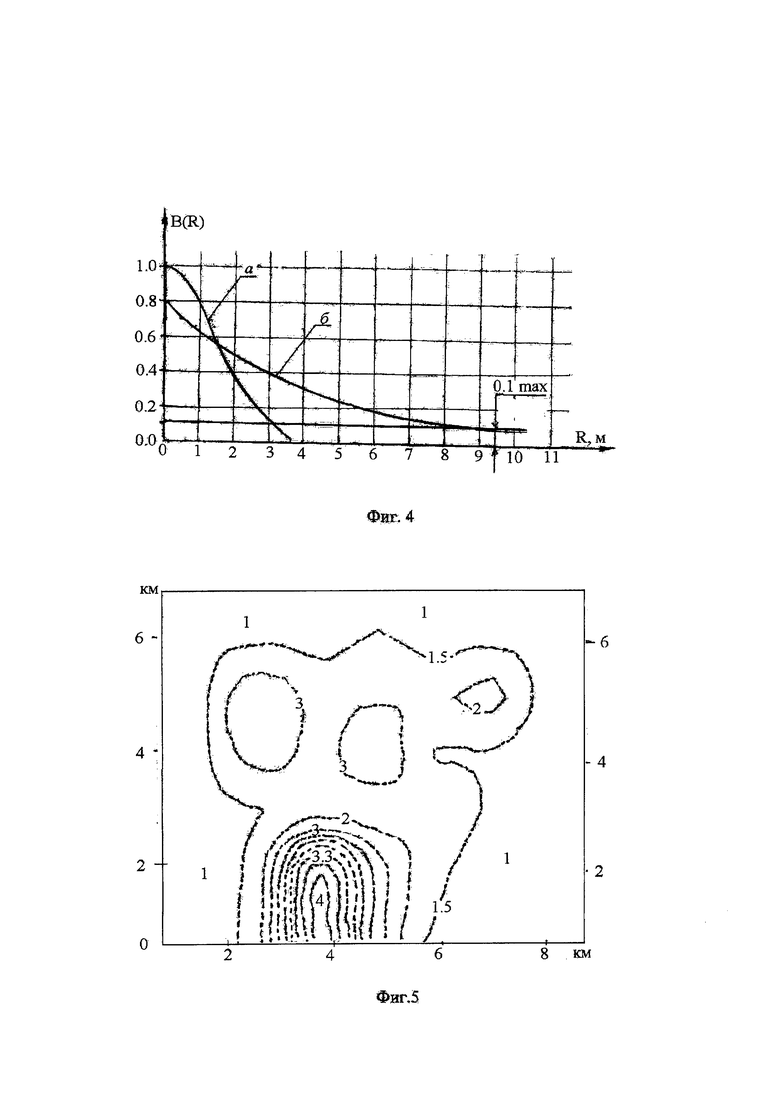
фиг. 4 - а) автокорреляционная функция сигнала тестового участка, б) взаимная корреляционная функция сигналов автодинного излучателя и цифровой видеокамеры текущего участка;
фиг. 5 - изолинии индекса загрязнения морской поверхности прибрежной зоны;
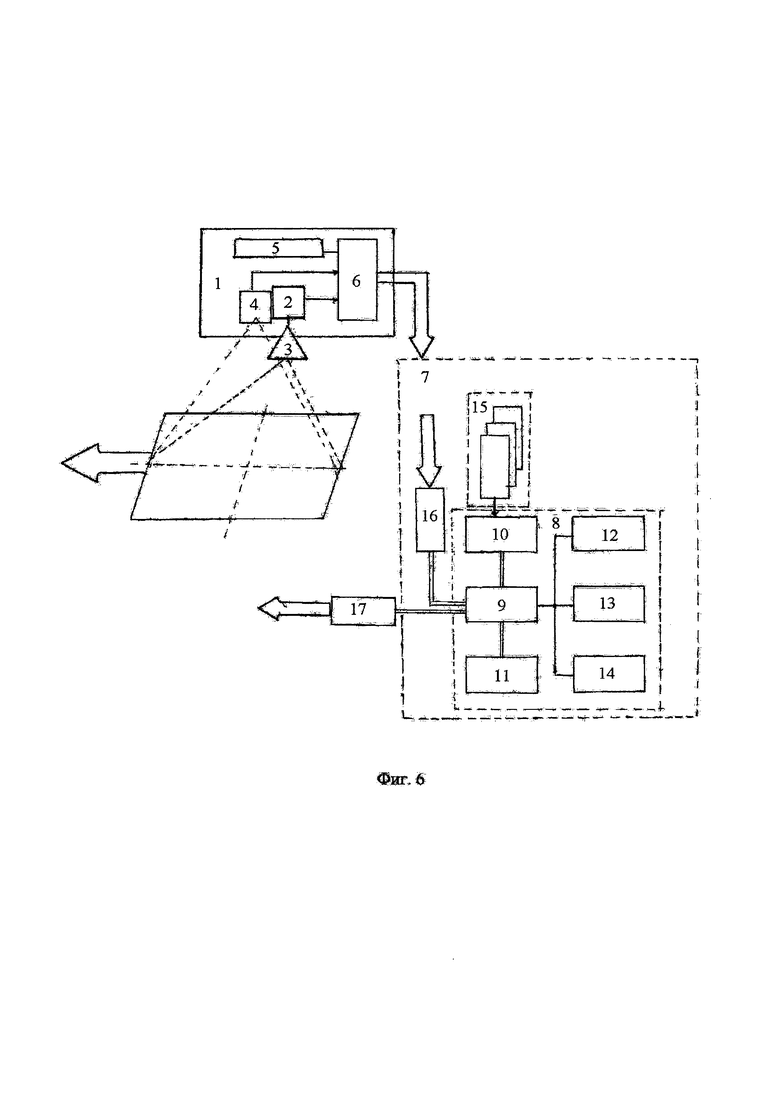
фиг. 6 - функциональная схема устройства, реализующая способ.
Техническая сущность изобретения состоит в следующем.
Известно явление затягивания частоты в автогенераторах СВЧ. Воздействие на автогенератор собственного отраженного от объекта сигнала приводит к автомодуляции генерируемых колебаний. При малых значениях коэффициента отражения (k) приближенное значение для девиации частоты автогенератора Δf имеет вид:
где:
ΔF - коэффициент затягивания частоты, паспортная характеристика электронного прибора, например, для СВЧ автогенератора на туннельном диоде Ганна Ф 225, ΔF≈50 МГц;
P - мощность сигнала автогенератора;
Pотр - мощность отраженного сигнала;
 - фаза расстройки между падающей и отраженной волной автогенератора, зависящая от изменения длины радиоканала Δl (расстояния между автогенератором и объектом).
- фаза расстройки между падающей и отраженной волной автогенератора, зависящая от изменения длины радиоканала Δl (расстояния между автогенератором и объектом).
Модуляционная характеристика радиоволнового излучателя в режиме затягивания частоты иллюстрируется графиками фиг. 1. При дистанционном зондировании взволнованной морской поверхности подобным излучателем вся «шероховатость» поверхности однозначно переносится в девиацию частоты, т.е. отображается в частотном спектре автогенератора. О реализуемости рассмотренного режима [см., например, «Справочник по радиоэлектронике» т. 2, под ред. А.А. Куликовского, М, Энергия, 1968 г., стр. 32-34, рис. 12.50, а также С.И. Бычков «Стабилизация частоты генераторов СВЧ», Сов. Радио, М, 1962 г., стр. 73-83]. Такие измерители получили название автодинных [см., например, Автодинный СВЧ-модуль, http://www.ptechnology.ru/MainPart/Diagnostic/Diagnostic16.html].
Осуществляя частотное детектирование сигнала автогенератора, напряжение на входе которого пропорционально изменению длины радиоканала из-за «шероховатости», получают спектр волнения морской поверхности.
Проводился лабораторный эксперимент на производственной базе Научно-производственного объединения измерительной техники (НПО ИТ) с использованием лабораторной установки «Рифма», разработанной при внедрении авторского изобретения «Способ контроля состояния объекта», АС. СССР №141912, 1980 г. На рисунке фиг. 2 воспроизведены измеренные через следящий фильтр с полосой слежения 1,5 Гц (фирмы Брюль и Къер) а) спектры волновой ряби и б) аномалии. Из-за взаимодействия ветровой ряби с уединенной волной или изменения коэффициента поверхностного натяжения при загрязнениях нефтепродуктами (от ≈0,071 до 0,021 н/м) частотный спектр волнения сократился от 24 Гц до 8 Гц [см., также, Научное открытие №62 «Явление поглощения спектральных составляющих волнового процесса уединенной волной», РАЕН, М, 1997 г.]. Чем больше индекс модуляции, тем точнее результат измерений частотного спектра ветрового волнения морской поверхности. Последнее реализуемо при большой эффективной площади рассеяния зондирующего сигнала или широкой диаграмме направленности автодинного измерителя. Но при этом снижается разрешающая способность, поскольку внутри диаграммы направленности объекты неразрешимы.
С другой стороны, высокое пространственное разрешение изображения подстилающей поверхности обеспечивают современные цифровые камеры видимого диапазона. В заявленном способе используют комплексирование двух сигналов, автодинного измерителя и цифровой видеокамеры, при этом предполагается детектирование волн морской поверхности, длины которых составляют 0,3 м и выше.
В соответствии с теоремой отсчетов Котельникова-Шеннона, непрерывная функция однозначно определяется своими дискретными отсчетами через интервал  , где Fmax - максимальная частота спектра функции [см., например, Теоретические основы радиолокации, под ред. В.Е. Дулевича, Сов. Радио, М, 1964 г., стр. 212]. Наименьшая исследуемая длина волны морской поверхности составляет 0,3 м. Следовательно, для неискаженного восстановления спектра морского волнения по его изображению, пространственное разрешение цифровой видеокамеры должно составлять порядка 0,15 м на пиксель. Существующие средства дистанционного зондирования обеспечивают требуемое пространственное разрешение.
, где Fmax - максимальная частота спектра функции [см., например, Теоретические основы радиолокации, под ред. В.Е. Дулевича, Сов. Радио, М, 1964 г., стр. 212]. Наименьшая исследуемая длина волны морской поверхности составляет 0,3 м. Следовательно, для неискаженного восстановления спектра морского волнения по его изображению, пространственное разрешение цифровой видеокамеры должно составлять порядка 0,15 м на пиксель. Существующие средства дистанционного зондирования обеспечивают требуемое пространственное разрешение.
Амплитудно-частотный спектр G(Fx, Fy) волнения может быть восстановлен по его изображению расчетом Фурье-преобразования матрицы отсчетов из |m×n| элементов в соответствии с зависимостью:

где Fx, Fy - спектр волнения по координатам x, y;
I(x, y) - функция яркости изображения;
m, n - число строк, столбцов матрицы |m×n|.
Существуют пакеты специализированных программ цифровой обработки изображений типа ENVI+IDL, ER MAPPER и др. [см., например, Краткое описание, Пакет программ для обработки изображений в науках о Земле, ER MAPPER, VSA, GENASYS, 1995 г.]. На графиках фиг. 3 иллюстрируются восстановленные спектры морского волнения а) тестового участка, б) аномального участка.
Количественной мерой степени взволнованности (скорости флуктуаций) является корреляционная функция сигнала B(R). По определению, [см., например, A.M. Заездный «Основы расчетов по статистической радиотехнике», изд. Связь, М, 1969 г., стр. 93-94, формулы 7.30, 7.35]. Корреляционная функция сигнала вычисляется как обратное преобразование Фурье от его энергетического спектра S(F):
где энергетический спектр сигнала S(F) связан с амплитудным спектром G(F) соотношением S(F)≈G2(F). Прямое и обратное Фурье-преобразования входят в комплект специализированного программного обеспечения типа ENVI+IDL или ER MAPPER.
Предварительно, по изложенной процедуре, вычисляют автокорреляционные функции тестовых участков, используемые как эталонные. Для статистической устойчивости результата, при оценке степени загрязнения морской поверхности, вычисляют взаимную корреляционную функцию спектра сигнала автодинного измерителя и спектра сигнала изображения цифровой видеокамеры.
Расчетные значения корреляционных функций иллюстрируются графиками фиг. 4 а) автокорреляционная функция сигнала тестового участка, В0 б) взаимная корреляционная функция двух сигналов текущего (аномального) участка, B(1, 2)
Меру загрязнения участка оценивают индексом отношения ширины функции взаимной корреляции к ширине автокорреляционной функции сигнала тестового участка на уровне 0,1 от их максимального значения:
Из последовательно проанализированных кадров (участков) формируют массив данных расчетных значений индекса по всей трассе измерений. Затем, методами пространственного дифференцирования, выделяют изолинии контуров загрязнения морской поверхности с нанесением их на контурную карту акватории.
Выделение контуров является стандартной операцией [см., например, П.А. Минько, Обработка графики в Photoshop CS2, изд. Эксмо, М, 2007 г. гл. 3, Выделение областей, стр. 47-53].
Результат выделения изолиний контуров иллюстрируется фиг. 5.
Пример реализации способа
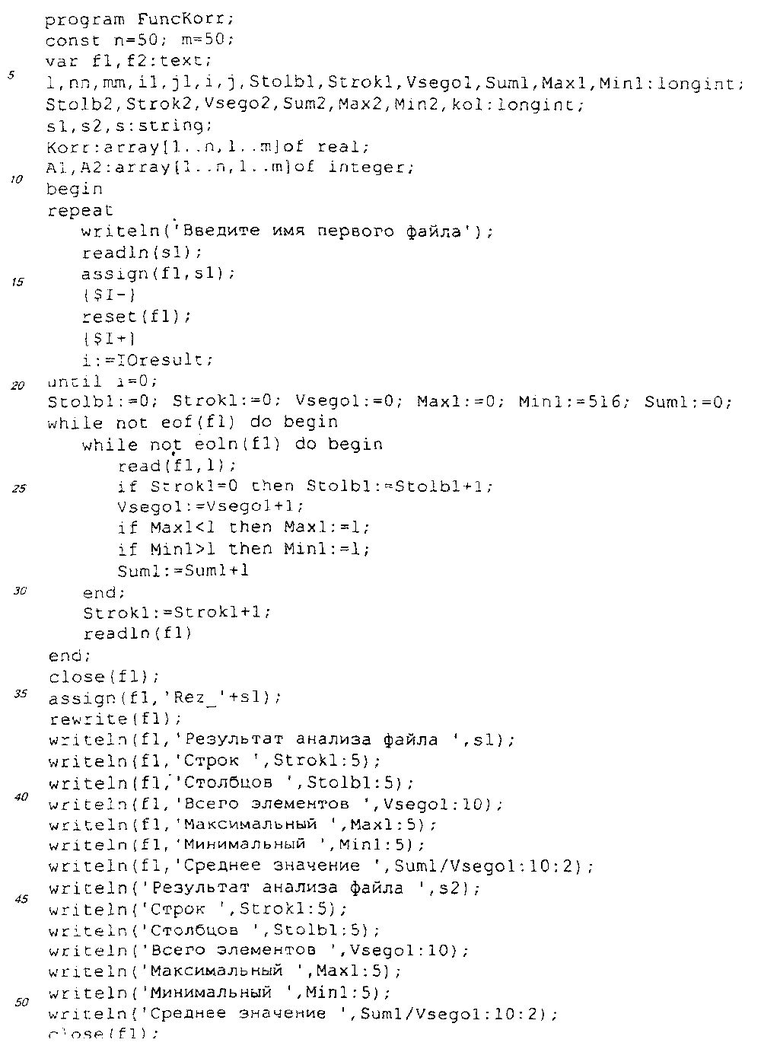
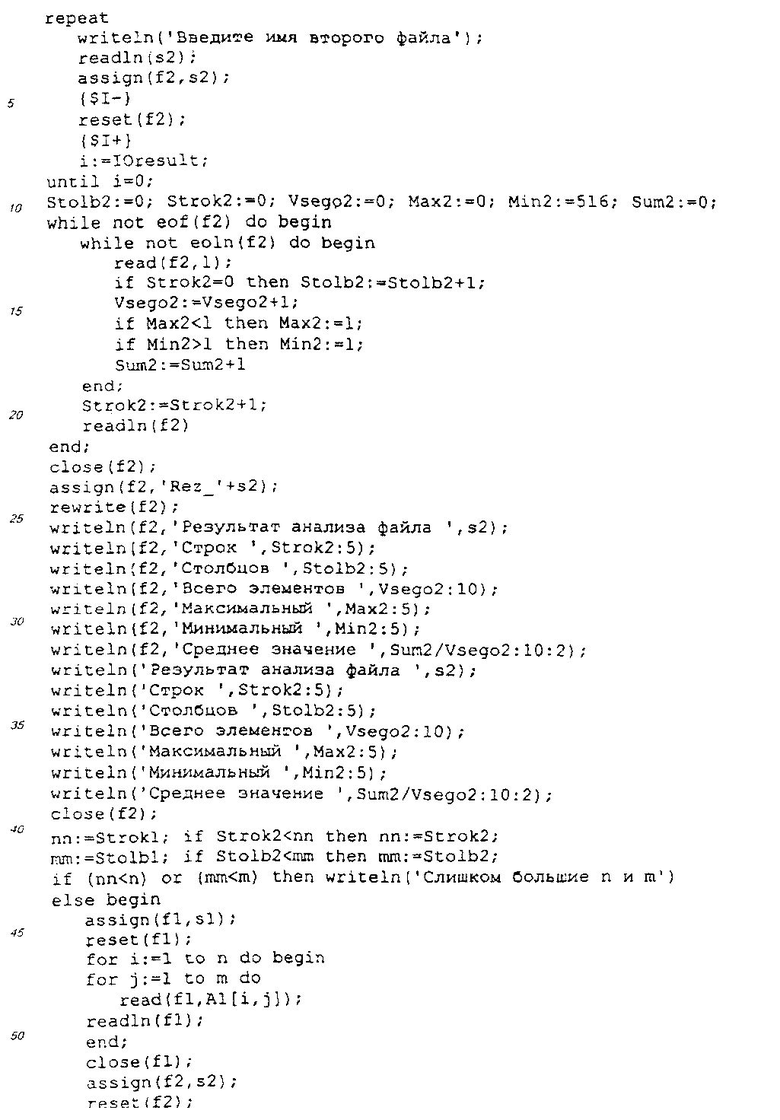
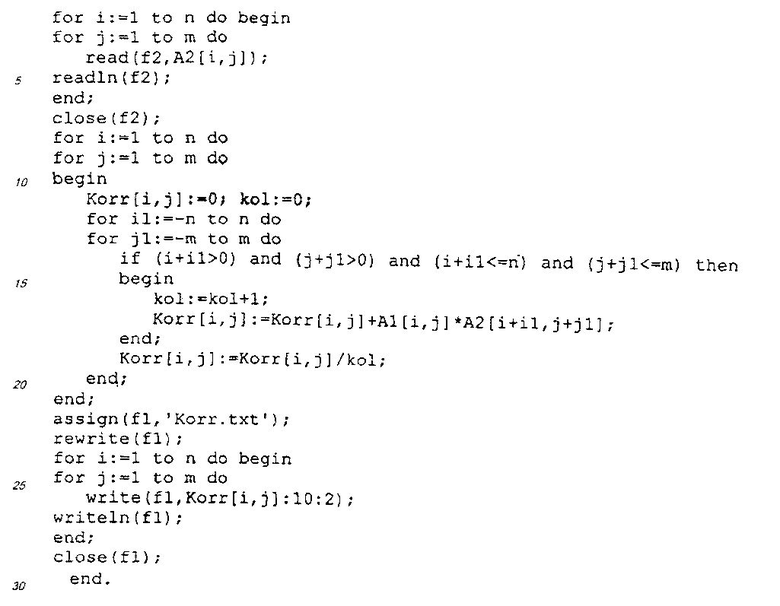
Заявленный способ может быть реализован на базе устройства по схеме фиг. 6. Структура технических средств включает авиационный носитель 1, на борту которого соосно установлены автодинный измеритель 2 с приемно-передающей рупорной антенной 3 и цифровая видеокамера 4, осуществляющие покадровую трассовую съемку морской поверхности с координатной привязкой кадров посредством бортового навигатора системы GPS 5. Результаты измерений бортовых средств записываются в буферное запоминающее устройство 6. После окончания трассовых измерений, информация с БЗУ 6 передается по наземным линиям связи в центр тематической обработки 7. Обработку полученной информации осуществляют на базе персональной ЭВМ 8 в стандартном наборе элементов: процессор 9, винчестер 10, оперативное ЗУ 11, дисплей 12, принтер 13, клавиатура 14. В центре создают базу эталонных сигналов 15 в виде автокорреляционных функций сигналов автодинного измерителя 2 в зависимости от бальности волнения. Для обработки сигналов на ПЭВМ предварительно записывают специализированное программное обеспечение типа ENVI+IDL или ER MAPPER. Затем, через устройство ввода 16, информация, записанная в БЗУ, перекачивается в ПЭВМ. Визуализацию Фурье-спектров осуществляют на дисплее 12 с распечаткой на принтере 13. Результаты трассовых измерений выводят на сайт сети ИНТЕРНЕТ 17. Для расчета функции взаимной корреляции сигналов автодинного измерителя и видеокамеры используют специально разработанную программу.
Программа расчета функции взаимной корреляции.
Результаты расчета корреляционных функций иллюстрируются графиками фиг. 4а, б. Ширина автокорреляционной функции фиг. 4а на уровне 0,1 max составляет: B(R)0,1max=3 м. Ширина взаимной корреляционной функции сигналов аномалии фиг. 4б составляет B(1,2)0,1max=10 M.
Индекс загрязнения поверхности аномальной зоны, отношение B(1,2)/B(R)=10/3≈3,3.
Результат выделения зон загрязнения по всей измеряемой трассе в виде изолиний загрязнения (в интервале 1…3,3) иллюстрируется рисунком фиг. 5.
Способ эффективен при условиях умеренного волнения и наблюдения неразрушенных гребней волн (бальность волнения: 0-3 балла по шкале Бофорта, скорость ветра 0-4 м/с). При скорости ветра около 4 м/с и волнении 3 балла по шкале Бофорта, гребни волн начинают разрушаться, появляются стекловидная пена и, изредка, барашки [см., например, Монин А.С., Красицкий В.П. Явления на поверхности океана. Л: "Гидрометиздат", 1985, 375 с.]. При больших бальности волнения и скорости ветра способ неприменим.
Способ реализуем на существующей технической базе. В качестве авиационного носителя измерительных средств могут быть задействованы летающие лаборатории, созданные в рамках Международной программы «Открытое небо».
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ЭТАЛОННЫХ СПЕКТРОВ ВОЛНЕНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2644628C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АНОМАЛИЙ МОРСКОЙ ПОВЕРХНОСТИ | 2017 |
|
RU2675072C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЗАГРЯЗНЕНИЙ МОРСКОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2632176C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ЗАГРЯЗНЕНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2018 |
|
RU2702423C1 |
| Способ идентификации загрязнений морской поверхности | 2015 |
|
RU2664255C2 |
| ИЗМЕРИТЕЛЬ ЗАГРЯЗНЕНИЙ МОРСКОЙ ПОВЕРХНОСТИ | 2018 |
|
RU2709598C1 |
| СПОСОБ ОБНАРУЖЕНИЯ АНОМАЛИЙ МОРСКОЙ ПОВЕРХНОСТИ | 1997 |
|
RU2109304C1 |
| СПОСОБ ПРЕДСКАЗАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 1997 |
|
RU2120647C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АНОМАЛИЙ НА МОРСКОЙ ПОВЕРХНОСТИ НЕКОНТАКТНЫМ РАДИОЛОКАЦИОННЫМ МЕТОДОМ | 2014 |
|
RU2582073C2 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО ЗОНИРОВАНИЯ ТЕРРИТОРИИ | 1998 |
|
RU2132606C1 |

Изобретение относится к способам дистанционных исследований морских акваторий и может быть использовано для определения загрязнения морской поверхности. Сущность: по трассам, содержащим тестовые участки, проводят дистанционное зондирование морской поверхности автодинным радиоволновым измерителем, установленным на авиационном носителе. Выполняют частотное детектирование сигнала измерителя. Создают базу эталонных сигналов ветрового волнения поверхности в виде их автокорреляционных функций. Одновременно получают видеоизображения участков по трассе полета соосно установленной цифровой видеокамерой высокого пространственного разрешения. Привязывают полученные видеокадры к топографическим координатам посредством навигатора системы GPS. Восстанавливают пространственный спектр волнения методом Фурье-преобразования изображений видеокадров. Вычисляют взаимную корреляционную функцию сигнала автодинного измерителя и видеокамеры. Рассчитывают индекс загрязнения участков через отношение ширины взаимной корреляционной функции к ширине эталонной автокорреляционной функции на уровне 0,1 от их максимального значения. Формируют массив данных из указанных отношений. Методами пространственного дифференцирования выделяют изолинии контуров индекса загрязнения, наносят их на контурную карту прибрежной или шельфовой зоны. Технический результат: достоверное выделение загрязненных зон морской поверхности. 6 ил.
Способ определения загрязнения морской поверхности, включающий выбор трасс, содержащих тестовые участки, для дистанционного зондирования с авиационного носителя автодинным радиоволновым измерителем, частотное детектирование сигнала измерителя и создание базы эталонных сигналов ветрового волнения поверхности в виде их автокорреляционных функций, одновременное получение видеоизображений участков по трассе полета цифровой соосно установленной видеокамерой высокого пространственного разрешения с привязкой получаемых кадров к топографическим координатам посредством навигатора системы GPS, восстановление пространственного спектра волнения методом Фурье-преобразования изображений видеокадров, вычисление взаимной корреляционной функции сигнала автодинного измерителя и видеокамеры, расчет индекса загрязнения участков через отношение ширины взаимной корреляционной функции к ширине эталонной автокорреляционной функции на уровне 0,1 от их максимального значения, формирование массива данных из этих отношений, выделение методами пространственного дифференцирования изолиний контуров индекса загрязнения с нанесением их на контурную карту прибрежной либо шельфовой зоны.
| СПОСОБ ОБНАРУЖЕНИЯ АНОМАЛИЙ МОРСКОЙ ПОВЕРХНОСТИ | 1997 |
|
RU2109304C1 |

