Изобретение относится к области дистанционного зондирования подстилающей поверхности и может найти применение при изучении гидрологических процессов в океанологии и контроле загрязнения прибрежных акваторий.
Для дистанционного обнаружения аномалий подстилающей поверхности используются различные методы и средства.
Известен «Способ обнаружения аномалий морской поверхности», Патент RU №2 109 304, 1998 г.
Устройство аналога содержит космический носитель с размещенным на нем радиолокатором с синтезированной апертурой для съемки последовательности кадров, их записи на бортовой магнитофон и передачи, в запланированных сеансах связи через спутник-ретранслятор, в центр управления и центр тематической обработки на средствах ПЭВМ (типа SUN) и комплекса специализированного программного обеспечения типа ER MAPPER 5.0.
Недостатком аналога является относительно невысокое пространственное разрешение радиолокаторов (порядка 10 м), в то время как требуемое пространственное разрешение для восстановления спектра ветрового волнения из изображения методом Фурье-преобразования составляет менее 1 метра.
Ближайшим аналогом к заявляемому техническому решению является «Измеритель эталонных спектров волнения морской поверхности», Патент RU №2644628, 2018 г - аналог.
Измеритель-аналог выполнен на базе СВЧ-генератора, работающего в режиме затягивания частоты, нагруженный на волновую секцию, с рупорной антенной на конце для облучения модели морской поверхности в замкнутом бассейне с задаваемой степенью загрязнения и балльностью волнения, путем ступенчатого регулирования скорости воздушного потока в соответствии со шкалой Бофорта, создаваемого вентилятором, в волноводную секцию последовательно включены направленный ответвитель, аттенюатор и фазовращатель, часть энергии генератора, через направленный ответвитель, выполненный в виде короткозамкнутого отреза волновода, передается в измерительный тракт из последовательно подключенных регулятора мощности и кристаллического детектора, размещенных в ответвителе, усилителя зарядов, следящего фильтра, регистратора и спектроанализатора. Недостатками аналога являются:
- невозможность непосредственного использования из-за различия технологий обработки сигналов;
- единственность измеряемого признака загрязнения - изменение спектра.
Задача, решаемая заявляемым устройством, состоит в количественном определении уровня загрязнений путем синхронных измерений двух параметров сигнала: спектра ветрового волнения и цветности отраженного светового потока, а также идентификации вида загрязнений путем вычисления функции взаимной корреляции этих сигналов. Поставленная задача решается тем, что измеритель загрязнений морской поверхности содержит два канала ее зондирования, для получения синхронных кадров по трассе полета, один из которых оптический, выполнен на спектрометре видимого диапазона, второй радиоканал на СВЧ-генераторе в режиме затягивания частоты, размещенные на аэрокоптере, с привязкой кадров по координатам от бортовой системы позиционирования, с последующей перекачкой измерений, после посадки носителя, на сервер наземной системы тематической обработки в составе вычислителя степени загрязнения на основе разности произведений селектируемых параметров сигналов в каналах, для оценки уровня загрязнений и коррелятора сигналов, для идентификации вида загрязнителей.
Изобретение поясняется чертежами, где:
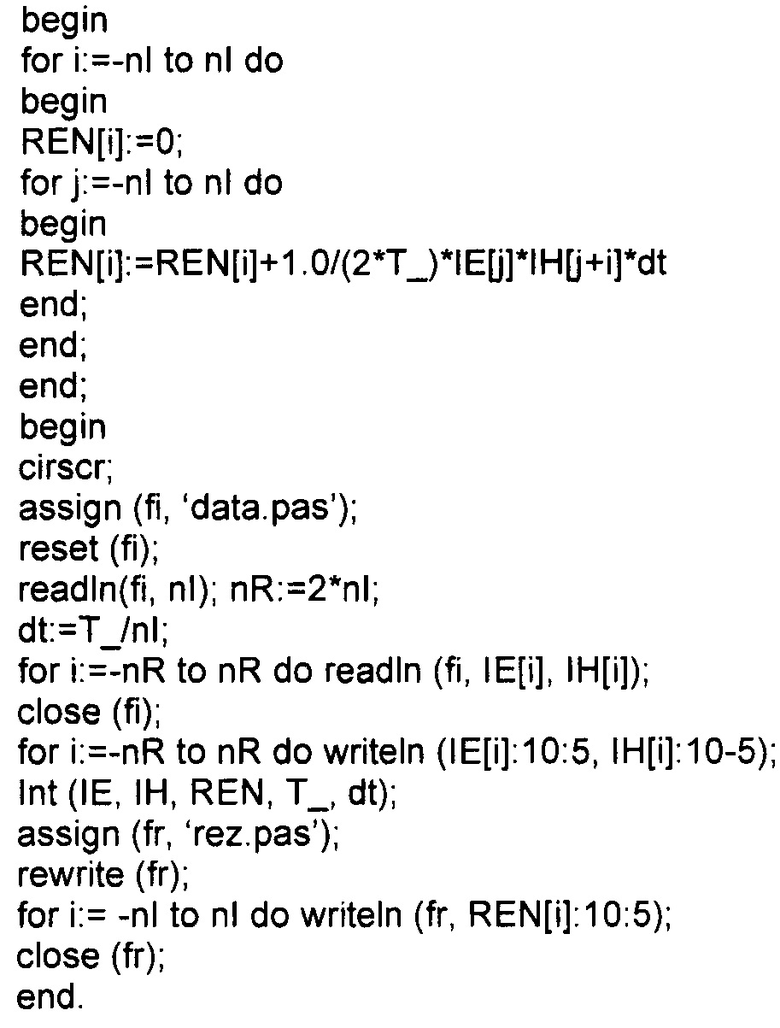
фиг. 1 - функциональная схема измерителя;
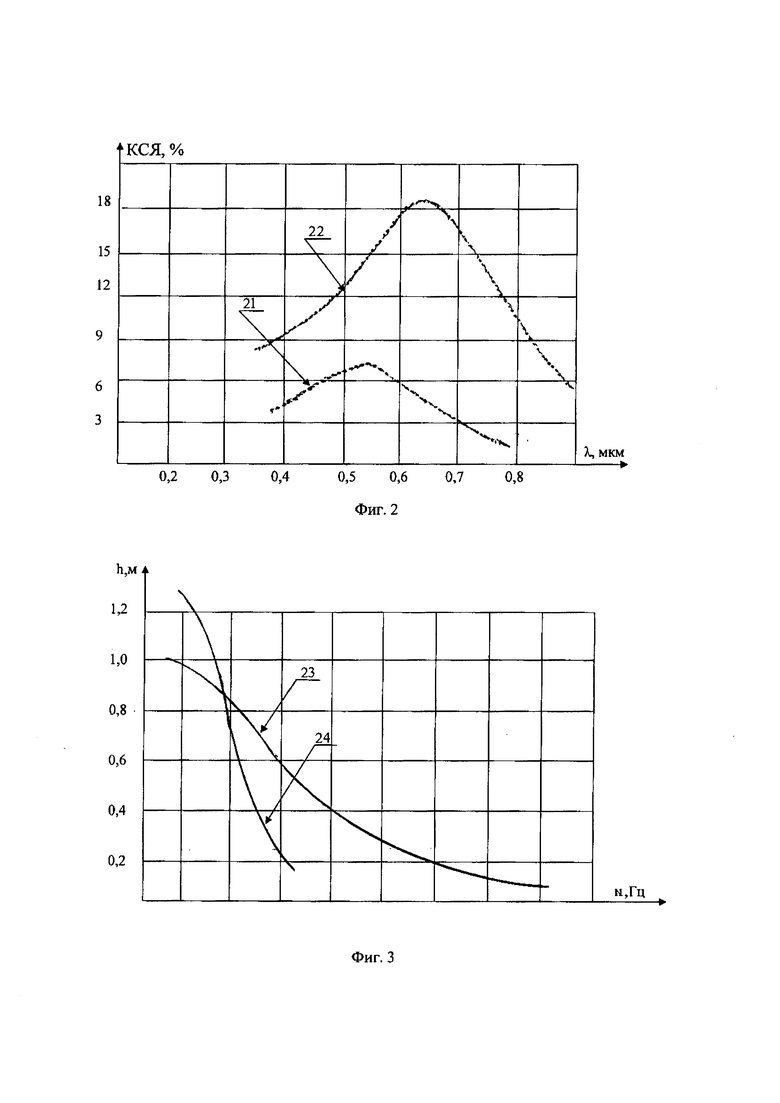
фиг. 2 - спектрограмма цветности (коэффициента спектральной яркости - КСЯ) отраженного светового потока: 21) эталонной, 22) загрязненной поверхности;
фиг. 3 - спектры ветрового волнения на выходе СВЧ-генератора а)эталонной, б)загрязненной поверхности;
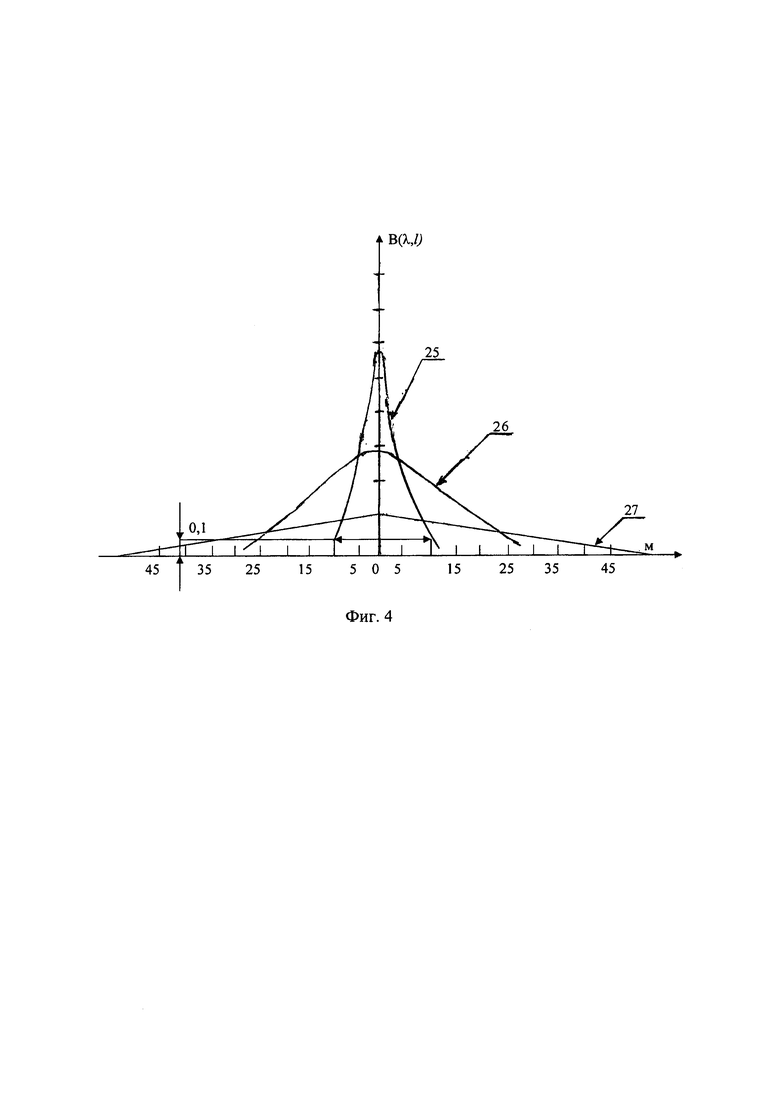
фиг. 4 - функции взаимной корреляции В (λ, l) сигналов от различных видов загрязнителей.
Измеритель загрязнений морской поверхности фиг.1 содержит два канала ее зондирования, один из которых выполнен на спектрометре 1, второй канал выполнен на СВЧ-генераторе 2, размещенных на аэрокоптере 3, с привязкой синхронных кадров измерений по координатам от бортовой системы позиционирования (ГЛОНАСС) 4 и записью сигналов зондирования в буферные запоминающие устройства (БЗУ) 5,6. Синхронизацию работы бортовых систем осуществляют путем закладки программы полета носителя в бортовой комплекс управления (БКУ) 7 по радиолинии управления аэрокоптера 8.
После посадки носителя-аэрокоптера 3, осуществляют перекачку измерений из БЗУ 5,6 на сервер 9 наземного центра тематической обработки 10 в составе ПЭВМ 11 с набором периферийных элементов: процессора вычислителя 12, оперативного ЗУ 13, винчестера 14, дисплея 15, принтера 16, клавиатуры 17, аналогово-цифровых преобразователей 18, 19, коррелятора 20.
Динамика взаимодействия элементов измерителя состоит в следующем. При загрязнении воды взвесями, пленками органических веществ, планктоном изменяется ее коэффициент поверхностного натяжения в пределах от 0, 071 до 0,03 (Н/м). и коэффициент преломления в интервале от 1,35 до 1,29. Кроме того, коэффициент преломления убывает обратно пропорционально квадрату длины волны. Большая часть светового потока, при преломлении на чистой воде, поглощается ее толщей. Наибольший коэффициент преломления имеет фиолетово-зеленый участок светового потока. Поэтому отраженный от морской воды световой поток меняет цветность, смещаясь в длинноволновую часть (оранжево-красную). Проводились экспериментальные измерения коэффициента спектральной яркости морской поверхности [см., например, Л.И. Чапурский «Отражательные свойства природных объектов в диапазоне 400…2500 нм МО СССР, 1986 г. Стр. 82, табл. 8.1]. Реализации измерений коэффициента спектральной яркости (КСЯ) морской поверхности эталонного участка 21 и загрязненного участка 22 иллюстрируются графиками фиг. 2. Селектируемым параметром сигнала является средневзвешенная длина волны λ светового потока, которая делит площадь под графиками 21, 22 (фиг. 2) пополам. Эти значения соответственно составили: λэтал = 0,54 мкм, λзагр = 0,60 мкм.
Одновременно, изменение коэффициента поверхностного натяжения воды приводит к демпфированию мелкодисперсной ряби и увеличению средневзвешенной высоты вол. Существуют средства прямого измерения пространственного спектра волнения на основе СВЧ-генераторов в режиме затягивания частоты. В режиме затягивания частоты несущая СВЧ-генератора модулируется спектром поверхностного волнения [см. ближайший аналог] График демпфирования мелкодисперсной ряби иллюстрирует фиг. 3. Средневзвешенная высота волн (l), составила 0,6 м (для незагрязненного участка - график 23 на фиг. 3) и 1 м (для загрязненного участка - график 24 на фиг. 3), в относительных единицах. Измеренные значения параметров сигналов составили:
для эталонного участка λ - 0,54 мкм, l = 0,6 м,
для загрязненного участка λ=0,60 мкм, l = 1,0 м. Разница произведений селектируемых параметров П:

Показатель степени загрязнения 
Кроме интегральной оценки степени загрязнений, измеритель позволяет идентифицировать вид загрязнителей. Основным методом идентификации объектов является сравнение с эталоном. Математической процедурой сравнения подобия двух функций служит вычисление взаимной корреляции их сигналов. По определению [см., например, Заездный В.М., «Основы расчетов по статистической радиотехнике», Связь-издат, М, 1969 г., стр. 92-95] корреляционная функция представляет энергию сигнала, слагаемую из энергии постоянной составляющей и энергии переменной составляющей (дисперсии). При отражении сигналов от загрязненной поверхности, (зеркального от нефтяных пленок до диффузного от неорганических и органических взвесей типа планктонов, бытовых стоков), изменяется соотношение между энергиями постоянной и переменной составляющими. Последнее является дополнительным селектируемым признаком при идентификации вида загрязнений.
При современном развитии вычислительной техники, методы корреляционного анализа легко реализуются специальными математическими программами для ПЭВМ. Предварительно осуществляют преобразование зарегистрированных сигналов из аналогового вида в цифровой посредством АЦП.
Текст программы вычисления функции взаимной корреляции.
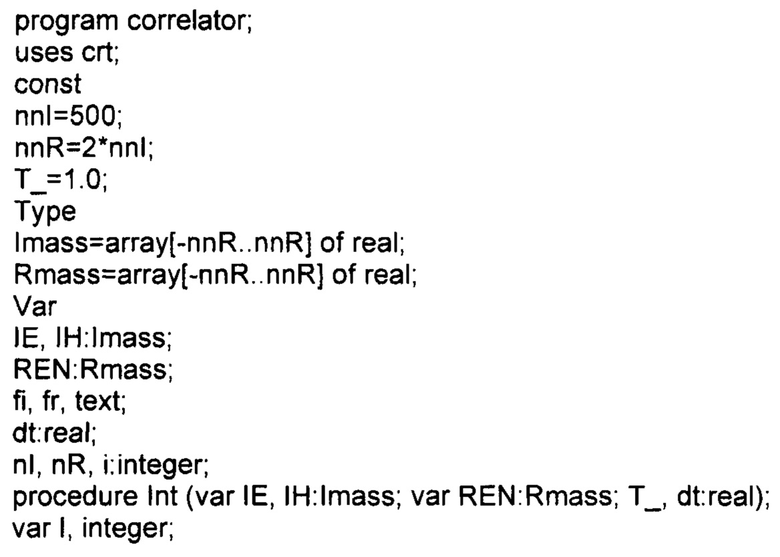
Результат расчета иллюстрируется графиками (25, 26, 27) фиг 4. Селектируемым параметром функции взаимной корреляции В (λ, l) служит интервал корреляции (ширина функции) на уровне 0,1 от ее максимального значения. Для быстрофлюктуирующего процесса функция имеет острую форму. Поэтому график 25 (фиг.4) может быть идентифицирован как мелкодисперсная рябь на эталонном участке, интервал корреляции сигналов порядка 10 м. График 26 (фиг. 4) имеет интервал корреляции порядка 20 м и может быть идентифицирован как участок, загрязненный нефтепродуктами. График 27 (фиг. 4) с интервалом корреляции порядка 35 м, может быть идентифицирован как участок загрязнений неорганическими и органическими веществами (взвеси, планктон, бытовые стоки).
Измеритель может быть выполнен на существующей технической базе. Эффективность устройства характеризуется такими показателями как достоверность, точность, оперативность. Программный расчет обеспечивает высокий уровень автоматизации с возможностью визуализации отслеживаемых процессов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАГРЯЗНЕНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2015 |
|
RU2596628C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ЗАГРЯЗНЕНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2018 |
|
RU2702423C1 |
| ИЗМЕРИТЕЛЬ ЭТАЛОННЫХ СПЕКТРОВ ВОЛНЕНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2644628C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АНОМАЛИЙ МОРСКОЙ ПОВЕРХНОСТИ | 2017 |
|
RU2675072C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЗАГРЯЗНЕНИЙ МОРСКОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2632176C1 |
| Способ геологической разведки минералов | 2019 |
|
RU2732545C1 |
| Способ идентификации загрязнений морской поверхности | 2015 |
|
RU2664255C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ТИПОВ РАСТИТЕЛЬНОСТИ | 1994 |
|
RU2115887C1 |
| СИСТЕМА ИЗМЕРЕНИЙ КОНЦЕНТРАЦИИ ПАРНИКОВЫХ ГАЗОВ В АТМОСФЕРЕ | 2016 |
|
RU2613841C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНДЕКСА СОСТОЯНИЯ АТМОСФЕРЫ ДЛЯ АНТРОПОГЕННЫХ ИСТОЧНИКОВ ЗАГРЯЗНЕНИЯ | 2015 |
|
RU2586939C1 |
Изобретение относится к средствам дистанционного контроля загрязнений морской поверхности. Сущность: измеритель состоит из элементов, размещенных на аэрокоптере (3), и наземного центра (10) тематической обработки. На аэрокоптере (3) размещены два канала зондирования: оптический, выполненный на спектрометре (1) видимого диапазона, и радиоканал на СВЧ-генераторе (2), работающем в режиме затягивания частоты, а также бортовая система (4) позиционирования, буферные запоминающие устройства (5, 6), бортовой комплекс (7) управления аэрокоптером по радиолинии (8). Наземный центр (10) тематической обработки включает ПЭВМ (11), аналого-цифровые преобразователи (18, 19) и коррелятор (20). Технический результат: повышение достоверности и оперативности контроля загрязнений морской поверхности. 4 ил.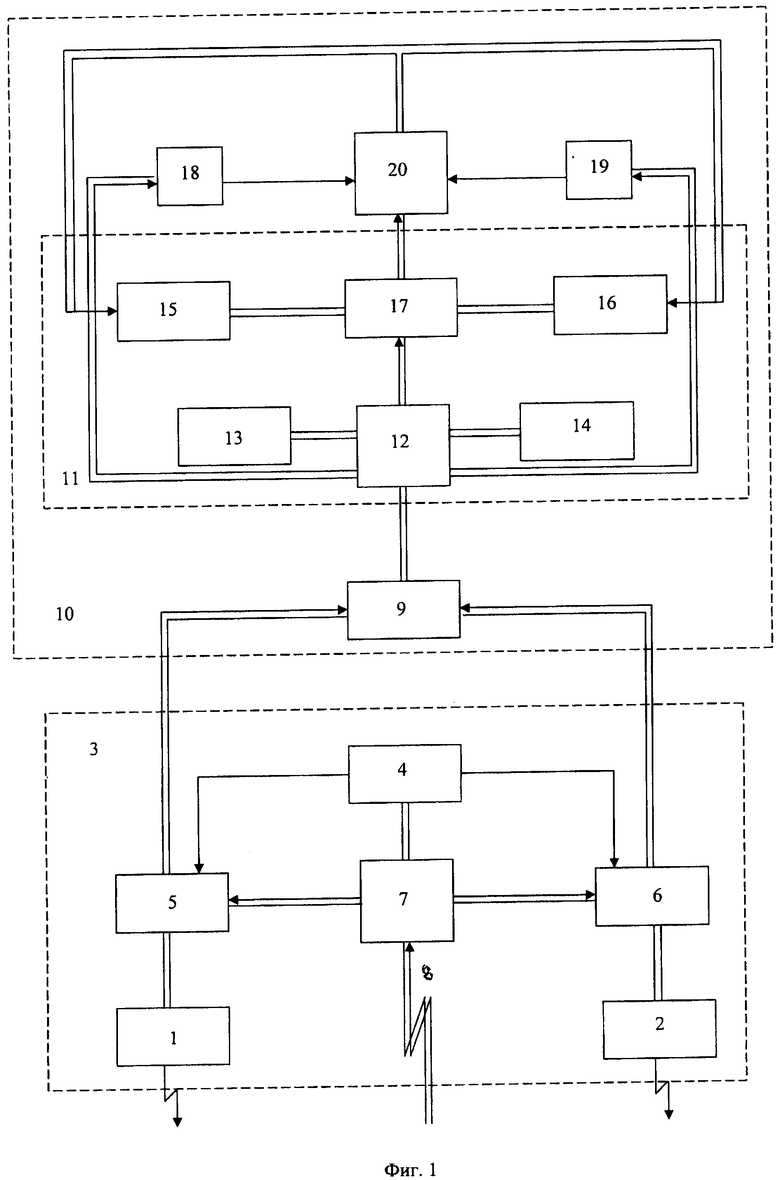
Измеритель загрязнений морской поверхности, содержащий два канала зондирования, один из которых – оптический, выполнен на спектрометре видимого диапазона, а второй - радиоканал на СВЧ-генераторе, работающем в режиме затягивания частоты, размещенные на аэрокоптере, для получения синхронных кадров по трассе полета с привязкой кадров по координатам от бортовой системы позиционирования, с последующей перекачкой измерений после посадки носителя на сервер наземной системы тематической обработки, включающей вычислитель степени загрязнения на основе разности произведений селектируемых параметров сигналов для оценки уровня загрязнений и коррелятор сигналов для идентификации вида загрязнителей.
| ИЗМЕРИТЕЛЬ ЭТАЛОННЫХ СПЕКТРОВ ВОЛНЕНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2644628C1 |
| Способ идентификации загрязнений морской поверхности | 2015 |
|
RU2664255C2 |
| RU 2015108531 А, 27.09.2016. | |||

