Изобретение относится к области электротехники, а именно к вентильным электродвигателям, и может найти применение в электроприводах различного назначения, в том числе и в качестве тяговых электродвигателей транспортных средств.
Известны [1, 2] бесконтактные двигатели постоянного тока, построенные на основе синхронных трех- и четырехфазных двигателей переменного тока с возбуждением от постоянных магнитов, расположенных на роторе. Секции обмотки статора объединяются в разомкнутую или замкнутую цепь (звезду, треугольник или многоугольник) и подключаются к коммутатору, выполненному на транзисторах или других полностью управляемых полупроводниковых приборах. Коммутатор управляется от датчика положения ротора и играет роль коллектора в двигателе постоянного тока - попеременно подключает к источнику питания концы лучей звезды или вершины треугольника (многоугольника), имитируя многофазное питание. Вращающий момент ротора появляется в результате взаимодействия вращающегося магнитного поля, создаваемого магнитной системой статора, с магнитными полями постоянных магнитов полюсов ротора. Направление вращения ротора определяется порядком чередования фаз, а частота его вращения - частотой вращения магнитного поля статора. Недостатками таких двигателей являются: сравнительно низкая энергоэффективность (коэффициент использования полюсов статора для создания крутящего момента ротора у двигателя на основе трехфазного синхронного двигателя не превышает 1,73), большие пусковые токи и большое количество силовых полупроводниковых приборов в составе коммутатора (не менее двух на фазу двигателя), что отрицательно сказывается на надежности их работы.
Известен однофазный вентильный электродвигатель с упрощенным управлением, повышенной энергоэффективностью и формой тока, близкой к синусоиде [3]. Этот аналог имеет следующие недостатки. Выполнение зубцов статора с выступом и обеспечением несимметричного воздушного зазора с целью самофиксации положения ротора перед пуском не решает полностью проблемы успешного пуска электродвигателя, но отрицательно сказывается на величине пускового и рабочего моментов. Явнополюсная конструкция статора приводит к увеличению габаритов устройства. Система управления двигателем достаточно сложна, что отрицательно сказывается на его надежности.
Известен также асинхронный вентильный двигатель с четным количеством фазных обмоток, выполненных со средними выводами, постоянно подключенными к одной клемме источника питания, и управлением через концевые выводы, которые через ключевые элементы подключены к другой клемме источника питания [4].
Недостатками этого аналога является поочередное подключение к источнику питания пар фазных обмоток, что отрицательно сказывается на величине крутящего момента, а также введение в схему питания обмоток статора дополнительных радиоэлементов (диодов, конденсаторов), что отрицательно сказывается на надежности его работы.
Наиболее близким к заявляемому техническому решению по технической сущности и достигаемому техническому результату является электродвигатель [5] с электромагнитами, установленными на статоре, которые, взаимодействуя с постоянными магнитами, установленными на роторе, обеспечивают на последнем создание крутящего момента. Электродвигатель содержит ротор с четным количеством постоянных магнитов, установленных по его периферии с чередующейся полярностью равномерно с угловым расстоянием между осями соседних магнитов α, статор с электромагнитами, установленными напротив постоянных магнитов ротора, которые, взаимодействуя с ними, обеспечивают на роторе создание крутящего момента. Электромагниты на статоре установлены, по меньшей мере, двумя группами таким образом, что в каждой группе угловое расстояние между осями любых двух электромагнитов кратно угловому расстоянию α. Группы электромагнитов смещены по дуге относительно друг друга таким образом, что когда оси электромагнитов одной группы совпадают с осями противолежащих постоянных магнитов, оси электромагнитов других групп не совпадают с осями противолежащих им постоянных магнитов. При этом любые два электромагнита одной группы установлены таким образом, что создают противоположно направленные магнитные потоки, если угловое расстояние между их осями кратно нечетному числу угловых расстояний α, и одинаково направленные, если угловое расстояние между их осями кратно четному числу угловых расстояний α. На статоре установлен датчик угла поворота ротора, соединенный своим выходом со средством перекоммутации питания электромагнитов, а на роторе по обеим сторонам каждого постоянного магнита установлены зонды с возможностью периодического взаимодействия с датчиком угла поворота ротора. Средство перекоммутации питания электромагнитов выполнено в виде электронного инвертора. Датчик угла поворота ротора выполнен в виде электромагнита, а зонды - в виде стержней из ферромагнитного материала.
Этот электродвигатель принят за прототип изобретения.
Недостатком прототипа являются то, что конструкция датчика положения позволяет определить лишь начало и конец совпадения электромагнитов одной из групп с постоянными магнитами ротора. Отключение от источника питания электромагнитов полюсов всей группы (другой возможности конструкцией не предусмотрено) при прохождении постоянных магнитов ротора над каждым отдельным электромагнитом приводит к неполному использованию групп электромагнитов статора в создании момента вращения на роторе, ухудшению динамических характеристик электродвигателя и снижению его энергоэффективности. Кроме того, перед подачей питания ротор может находиться в таком положении, когда оси симметрии электромагнитов статора ни одной из групп электромагнитов не совпадают с осями симметрии постоянных магнитов ротора и ни один из зондов не совпадает с электромагнитом датчика, то есть позиция коммутации не определена. В этой ситуации мала вероятность успешного пуска электродвигателя.
Общими с изобретением признаками прототипа являются:
- ротор с четным количеством постоянных магнитов, установленных равномерно по его периферии с чередующейся полярностью,
- статор с электромагнитами,
- создание крутящего момента на роторе взаимодействием его постоянных магнитов с электромагнитами статора,
- наличие датчика положения и средства перекоммутации питания обмоток электромагнитов.
В основу настоящего изобретения положена задача повышения надежности пуска, увеличения крутящего момента, улучшения динамических характеристик, улучшения технологичности конструкции и расширения области использования вентильного электродвигателя.
Поставленная задача решена следующим образом. В многополюсном вентильном электродвигателе, содержащем ротор с четным количеством постоянных магнитов, установленных равномерно по его периферии с чередующейся полярностью, статор с электромагнитами, обеспечивающими создание крутящего момента взаимодействием с постоянными магнитами ротора, датчик положения ротора и средство перекоммутации питания обмоток электромагнитов. Средство перекоммутации питания электромагнитов выполнено в виде мостового полупроводникового коммутатора. Обмотки электромагнитов выполнены насыпными, многосекционными с укладкой секций в пазы магнитопровода статора с образованием его полюсов. При этом количество полюсов на статоре равно количеству полюсов на роторе и кратно 4. Секции обмоток полюсов соединяют согласно и однотипно (последовательно, параллельно или сочетанием упомянутых способов). Обмотки полюсов соединяют также однотипно (одним из упомянутых выше способов) с образованием обмотки статора, в которой обмотки соседних полюсов соединены попарно встречно. Датчик положения ротора выполнен на четырех цифровых датчиках Холла, чувствительные элементы которых закреплены на статоре согласованно с радиальными осями симметрии его полюсов, а задающие элементы - на валу ротора согласованно с радиальными осями симметрии его полюсов. При этом один задающий элемент датчика выполнен с возможностью определения одним из его чувствительных элементов двух позиций коммутации при приведении ротора в положение для успешного пуска, а другим - двух позиций коммутации при работе электродвигателя. Другой задающий элемент датчика положения ротора выполнен с возможностью определения одним из его чувствительных элементов совпадения при вращении осей радиальной симметрии полюсов ротора и статора, а другим - положения ротора, обеспечивающего успешный пуск электродвигателя в любом из направлений вращения. Выход датчика положения ротора соединен с входом блока управления, один выход которого соединен с входом микроконтроллера, выход которого соединен с другим входом блока управления, другой выход блока управления соединен с управляющим входом мостового коммутатора, одна диагональ выхода которого соединена с источником питания, а другая - с обмоткой статора.
Задача повышения надежности пуска решена предварительной принудительной выставкой ротора в положение, при котором оси радиальной симметрии постоянных магнитов ротора расположены по центру между полюсами статора.
Задача увеличения крутящего момента вентильного электродвигателя решена путем привлечения к его созданию обмоток всех полюсов статора.
Задача улучшения динамических характеристик вентильного электродвигателя решена путем аппаратурной реализации процессов коммутации и блокирования «мертвых» положений ротора, а также путем применения для управления частотой вращения ротора только широтно-импульсной модуляции (ШИМ).
Задача улучшения технологичности конструкции вентильного электродвигателя решена разработкой нескольких схем соединения секций обмоток полюсов и самих обмоток полюсов, что позволяет в рамках одного технологического процесса выпускать ряд электродвигателей с одинаковыми техническими характеристиками, но рассчитанных на различное напряжение питания (6, 12 или 24 вольта, например).
Задача расширения области использования предлагаемого вентильного электродвигателя решена путем расширения его функциональных возможностей за счет реализации отработки заданного направления вращения, обеспечения широкого диапазона частоты вращения, а также обеспечения возможности торможения и реверса.
Заявляемое техническое решение поясняется схемами, рисунками и векторными диаграммами.
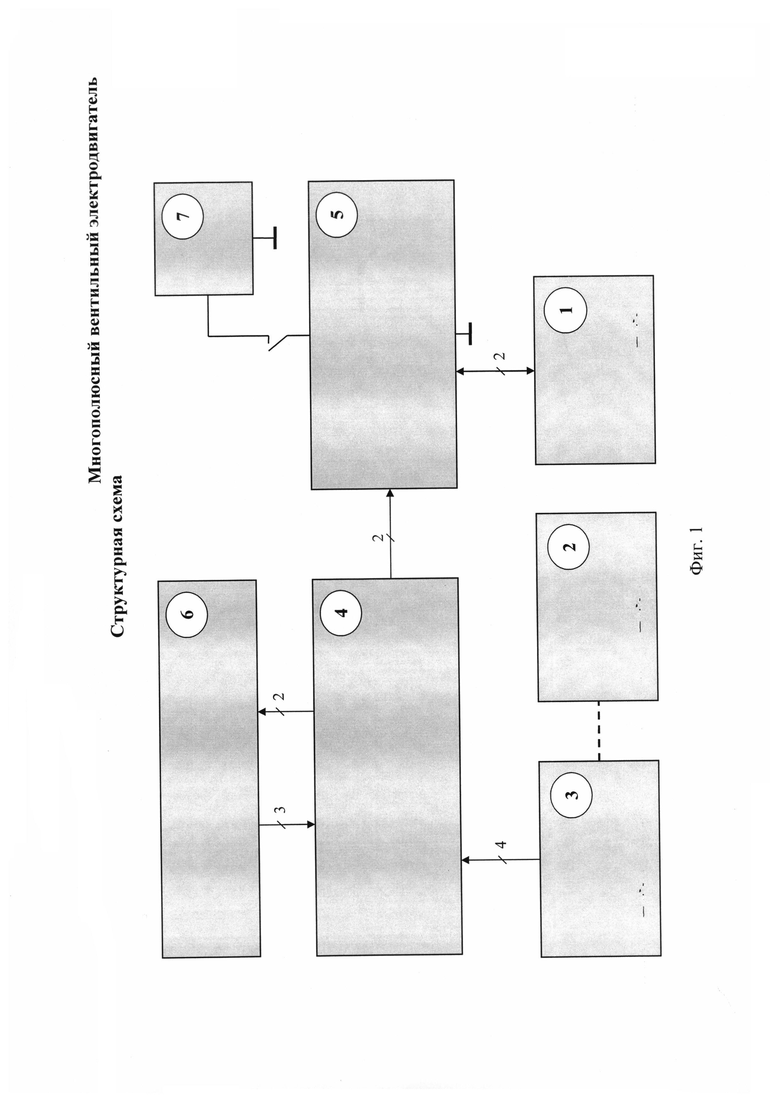
На фиг. 1 изображена структурная схема предлагаемого многополюсного вентильного электродвигателя.
На фиг. 2 приведены особенности конструкции обмотки статора, ротора и датчика положения в четырехполюсном варианте многополюсного вентильного электродвигателя.
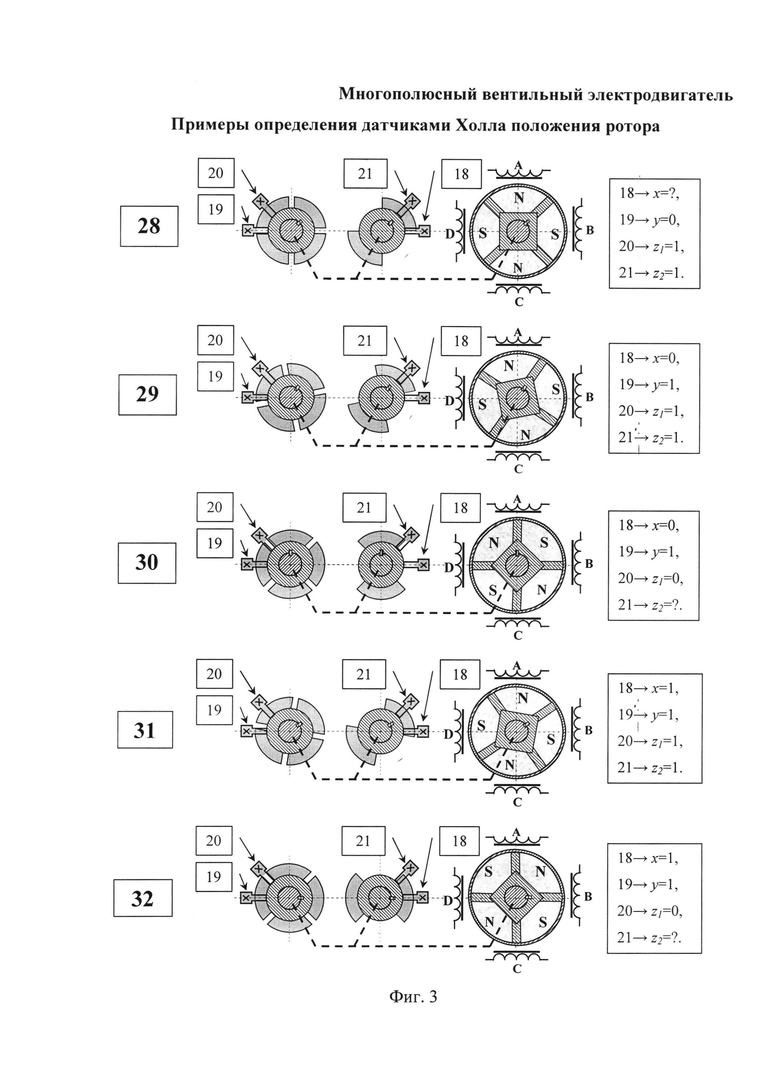
На фиг. 3 и 4 приведены примеры определения датчиками Холла положения ротора четырехполюсного варианта многополюсного вентильного электродвигателя.
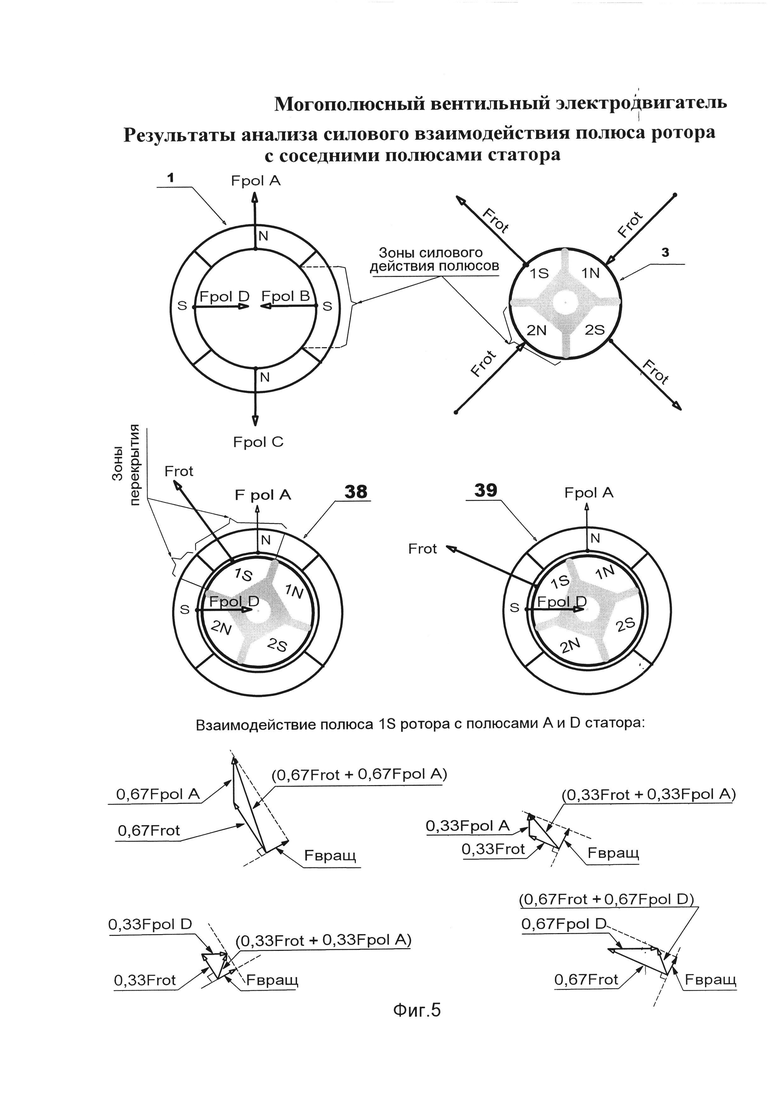
На фиг. 5 приведены результаты анализа силового взаимодействия полюса ротора с соседними полюсами статора.
На фиг. 6 приведен пример функциональной схемы четырехполюсного варианта многополюсного вентильного электродвигателя.
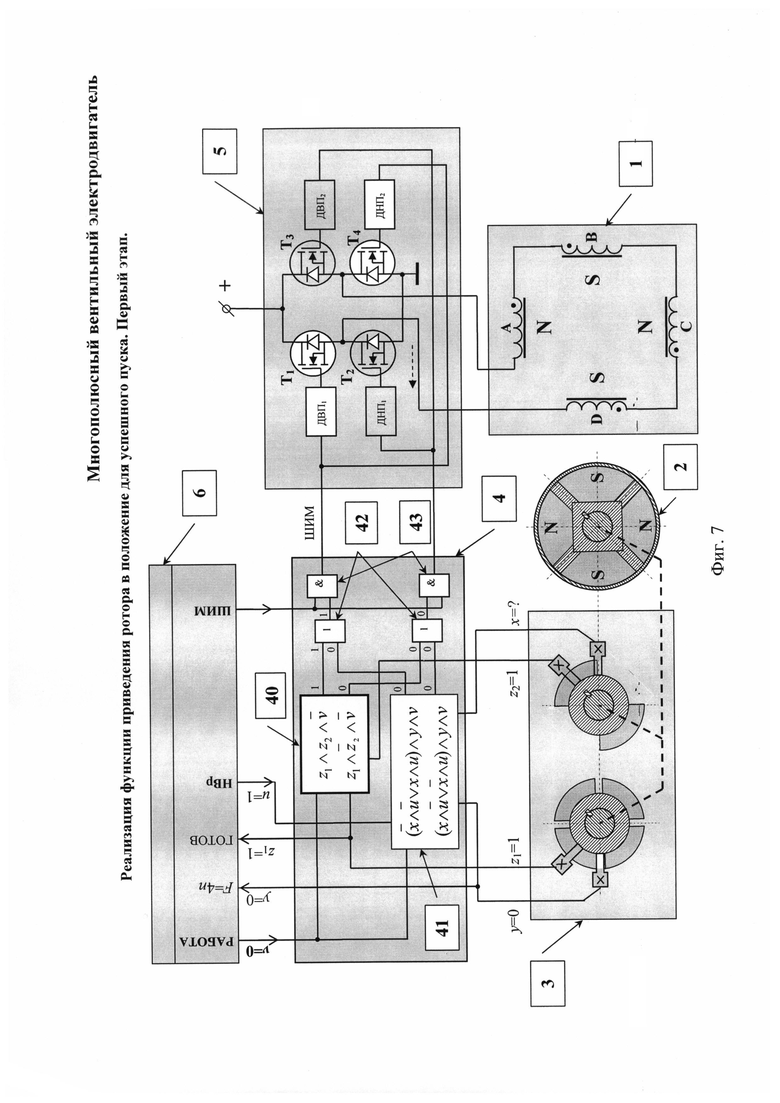
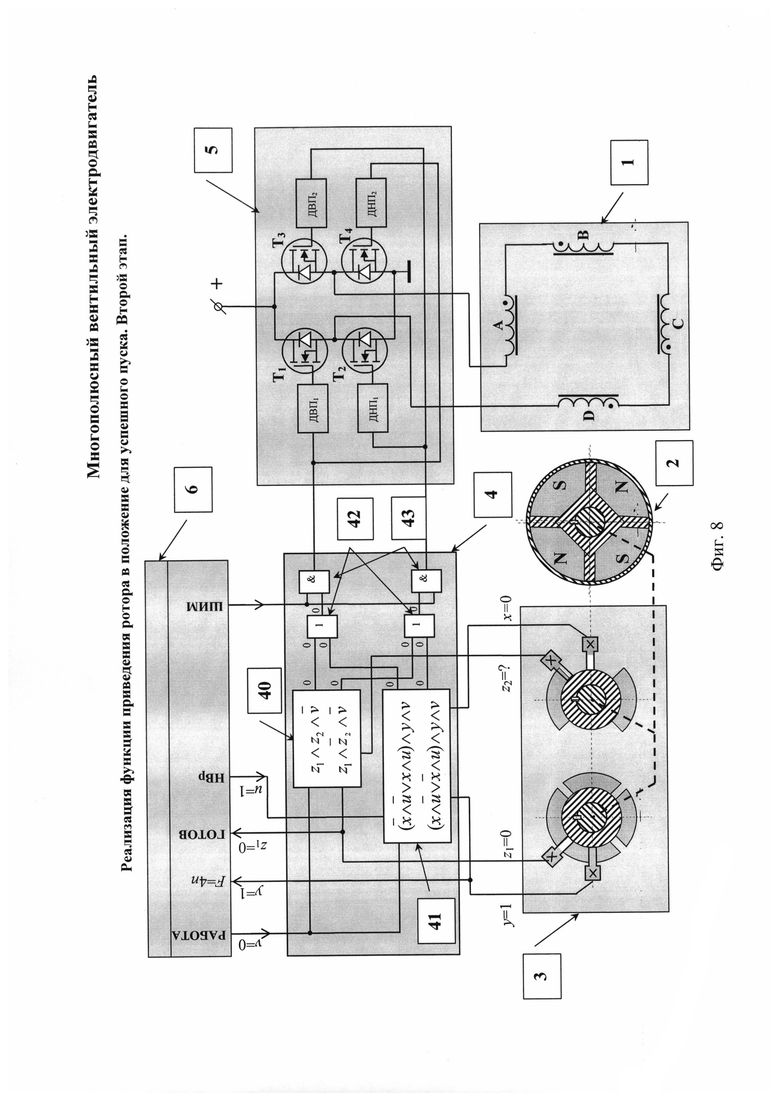
На фиг. 7 и 8 приведены этапы реализации функции приведения ротора в положение для успешного пуска.
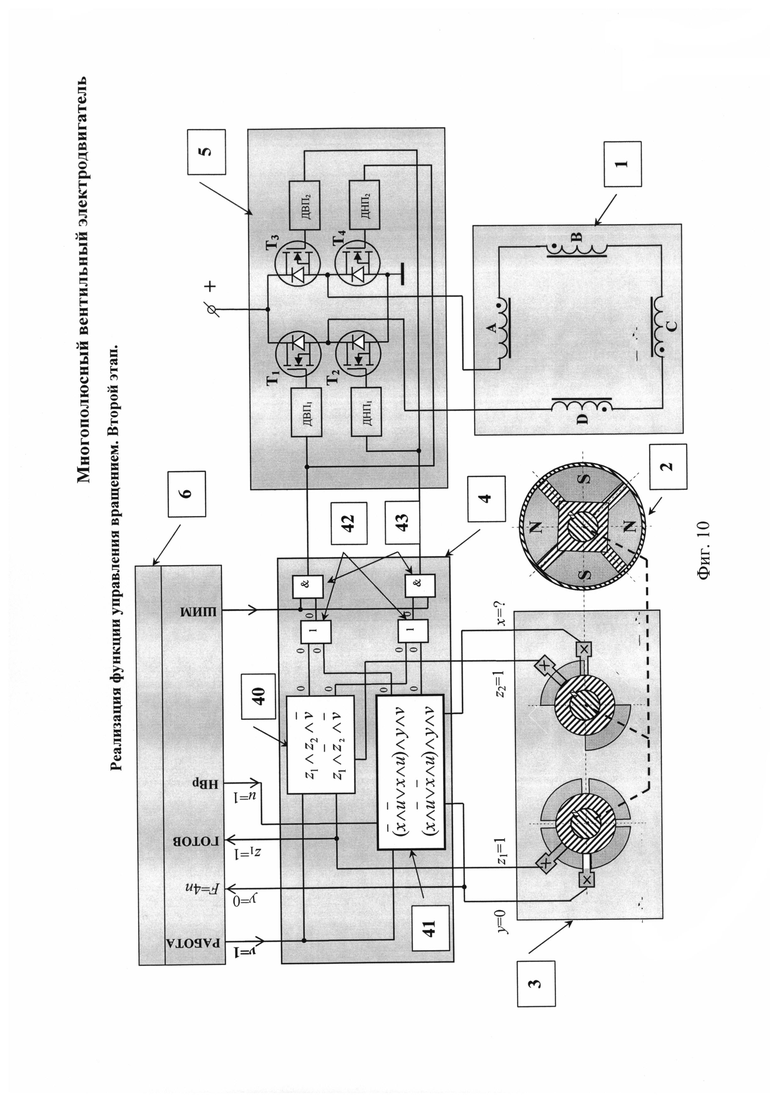
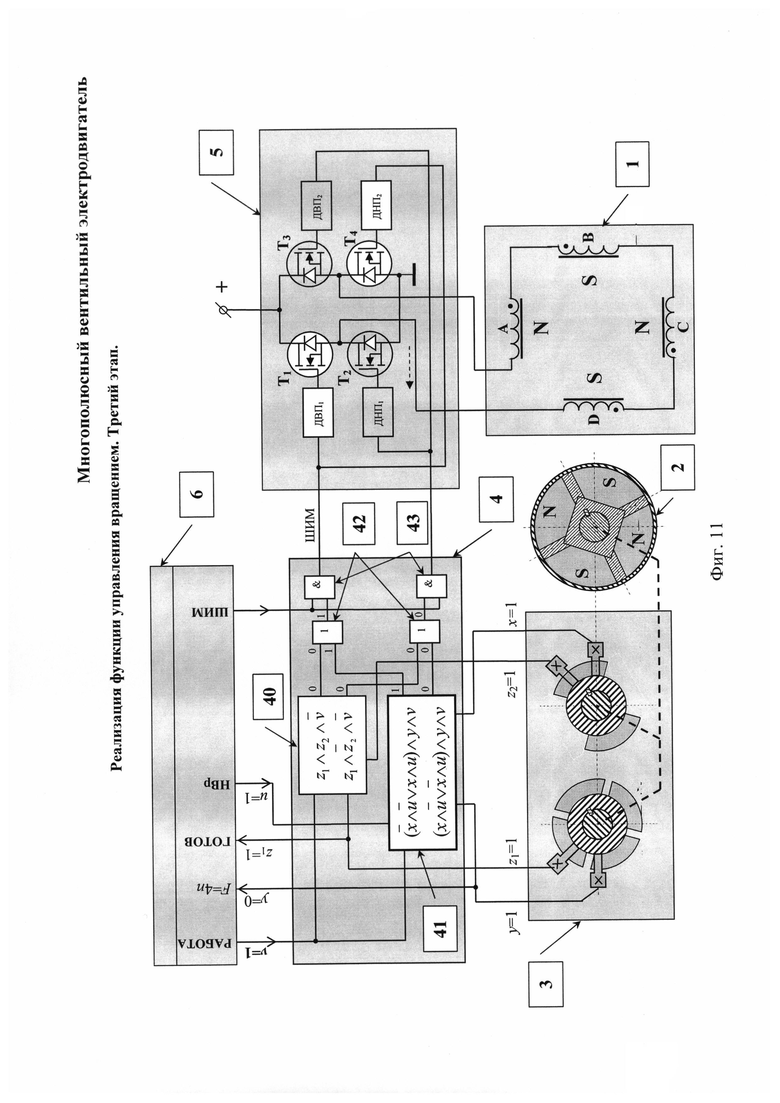
На фиг. 9, 10 и 11 приведены этапы реализации функции управления вращением.
Предлагаемый многополюсный вентильный электродвигатель (фиг. 1) содержит: статор 1 с размещенной на нем обмоткой, ротор 2, датчик положения ротора 3, блок управления 4, мостовой коммутатор 5 и микроконтроллер 6.
Выход датчика положения 3 соединен с входом блока управления 4, один выход которого соединен с входом мостового коммутатора 5, а другой - с входом микроконтроллера 6, выход которого соединен с другим входом блока управления 4. Выход мостового коммутатора 5 соединен с обмоткой статора 1.
Обмотки полюсов статора 1 - многосекционные. Секции 8 (фиг. 2) укладываются в пазы магнитопровода статора 9, соединяются согласно и однотипно-последовательно 10 или параллельно 11. При четном количестве секций в обмотках возможно их параллельно-последовательное соединение.
Обмотки полюсов, секции которых соединены одним из упомянутых способов, соединяются согласно (см. позиции 12 и 13). Обмотки соседних полюсов, соединенные одним из упомянутых выше способов, соединяются попарно встречно (см. позиции 14, 15, 16 и 17).
Многовариантность описанных выше соединений позволяет расширить типоряд многополюсных вентильных двигателей за счет создания образцов, отличающихся напряжением питания, без изменения базовых конструктивных решений и существенных изменений технологии изготовления.
Ротор 2 имеет количество полюсов, кратное четырем. Количество полюсов статора 1 равно количеству полюсов ротора 2. Мостовой коммутатор 5 одной диагональю моста подключается к источнику питания 7, а к другой диагональю - к обмотке статора 1.
Датчик положения 3 предназначен для определения углового положения ротора 2 относительно полюсов статора 1. Он выполнен (см. фиг. 2) на четырех цифровых датчиках Холла, чувствительные элементы которых 18, 19, 20 и 21 закреплены на статоре электродвигателя 22 согласованно с осями радиальной симметрии полюсов статора (принадлежность обмоток к полюсам неявнополюсного статора на чертеже показана символами А, В, С и D), а инициирующие их работу элементы 23 и 24 закреплены на валу 25 ротора 2 согласованно с радиальными осями симметрии его полюсов. Инициирующий элемент 23 выполнен с возможностью фиксации двух позиций коммутации чувствительным элементом 18 при работе электродвигателя, а чувствительным элементом 21 при приведении ротора 2 в положение для успешного пуска электродвигателя. Инициирующий элемент 24 выполнен с возможностью надежной фиксации чувствительным элементом 19 моментов совпадения при вращении ротора 2 осей радиальной симметрии его полюсов с осями радиальной симметрии полюсов статора 1 (потенциально «мертвых» положений ротора) на максимальной частоте вращения ротора 2, а чувствительным элементом 20 - положения ротора 2 для успешного пуска электродвигателя. Постоянные магниты 26 с чередующейся полярностью закреплены на магнитопроводе 27 ротора 2. Чувствительный элемент 29, дополнительно к указанному выше, позволяет микроконтроллеру 6 определять частоту вращения ротора с точностью до 1/n его полного оборота, где n - количество полюсов.
Блок управления 4 предназначен для реализации управления коммутацией при приведении ротора в положение для успешного пуска, при пуске и в ходе работы многополюсного вентильного электродвигателя.
Мостовой коммутатор 5 предназначен для исполнения позиций коммутации по командам с блока управления 4.
Микроконтроллер 6 предназначен для: оценки готовности электродвигателя к пуску, задания (изменения) направления вращения, выдачи команды на пуск, управления разгоном, частотой вращения и интенсивностью торможения в ходе работы путем широтно-импульсной модуляции (ШИМ) выходных элементов блока управления 4, реализации реверса.
Анализ конфигураций, изображенных на фиг. 3 и фиг. 4, позволил сформулировать следующие принципы управления предлагаемым многополюсным вентильным электродвигателем:
1) Логические условия (см. позиции 30,32, 35, 37, фиг. 3 и 4) формирования позиций коммутации при приведении ротора в положение для успешного пуска:


2) Логические условия (см. остальные позиции на фиг. 3 и 4) формирования позиций коммутации при управлении пуском, разгоном и вращением:


где х - логическая переменная, отображающая состояния выхода чувствительного элемента 18, у - логическая переменная, отображающая состояния выхода чувствительного элемента 19, z1 - логическая переменная, отображающая состояния выхода чувствительного элемента 20, z2 - логическая переменная, отображающая состояния выхода чувствительного элемента 21, u - логическая переменная, отображающая направления вращения «НВр», ν - логическая переменная, отображающая режим работы: приведение ротора в исходное для пуска положение (ν=0) или «Пуск» и «Работа» (ν=1). Значения логических переменных u и ν задаются микроконтроллером 6.
Физика работы заявляемого многополюсного вентильного электродвигателя основана на силовом взаимодействии постоянных магнитов полюсов ротора и электромагнитов полюсов статора. Согласно формуле Максвелла величина силы тяги электромагнита прямо пропорциональна квадрату индукции электромагнитного поля и площади полюса, и обратно пропорциональна магнитной проницаемости. Эту зависимость адаптируем к силам притягивания разноименных и отталкивания одноименных полюсов постоянных магнитов ротора и электромагнитов полюсов статора следующим образом:

где: F - значение силы, S - площадь полюса, µ - магнитная проницаемость, а k - коэффициент перекрытия площадей взаимодействующих полюсов.
Направления сил примем одинаковыми с направлениями создаваемых полюсами магнитных потоков. Взаимодействие полюса ротора 1S с соседними полюсами статора иллюстрируется фиг. 5, на которой принадлежность к порождающим объектам отображается индексами при символах сил F, например: FpolА обозначает силу, порождаемую электромагнитом полюса А статора, a Frot обозначает силу, порождаемую постоянным магнитом ротора 2.
Величины сил полюсов статора 1 показаны меньше сил постоянных магнитов ротора 2 во избежание их перемагничивания в ходе работы. Значения сил в позициях 38 и 39 скорректированы с учетом коэффициентов перекрытия площадей постоянных магнитов ротора и полюсов статора. В позиции 38 коэффициент перекрытия полюса А статора и постоянного магнита 1S ротора составляет 0,67, а коэффициент перекрытия полюса D статора и постоянного магнита 1S ротора составляет 0,33 от значения 1,0 при полном совпадении осей радиальной симметрии взаимодействующих постоянных магнитов и полюсов. Конфигурации 39 характерны противоположные соотношения. Силовое взаимодействие между одним из постоянных магнитов ротора и соседними полюсами статора сопровождается векторными диаграммами, изображенными ниже упомянутых выше конфигураций.
Из анализа векторных диаграмм следует, что при расположении постоянного магнита ротора между полюсами статора, обмотки которых находятся под током, и на обращенной к ротору стороне создают противоположно направленные магнитные потоки, на ротор действует пара сил Fвращ. Одна из сил в паре является следствием притяжения постоянного магнита ротора полюсом статора разноименной магнитной полярности, а другая - следствием отталкивания постоянного магнита ротора полюсом статора одноименной магнитной полярности. Векторы этих сил коллинеарны. Поэтому в создании момента вращения ротора эти силы равноправны.
Направления действия сил Fвращ, знак создаваемого ими момента на роторе и, следовательно, направление его вращения определяются соотношением магнитных полярностей соседних к постоянным магнитам ротора полюсов статора.
Из перечисленного выше и чередующейся полярности постоянных магнитов на роторе следуют:
- результативность расположения постоянных магнитов ротора по середине между полюсами статора для успешного пуска электродвигателя в любом из направлений вращения,
- зависимость величины момента вращения на роторе, в том числе от количества постоянных магнитов на роторе, и результативность равенства количества постоянных магнитов на роторе количеству полюсов статора,
- зависимость направления вращения ротора от соотношения магнитных полярностей соседних (к постоянным магнитам ротора) полюсов статора,
- необходимость чередования магнитных полярностей полюсов статора,
- возможность одновременного участия в создании момента вращения на роторе многополюсного вентильного электродвигателя всех полюсов статора,
- достаточность двух позиций коммутации для управления работой предлагаемого вентильного электродвигателя,
- необходимость блокирования конфигураций, в которых оси радиальной симметрии постоянных магнитов ротора совпадают с осями радиальной симметрии полюсов статора разноименной магнитной полярности.
Согласно вскрытым причинно-следственным связям изобретением предлагается следующее:
- кратность четырем количества постоянных магнитов на роторе и их равенство количеству полюсов статора (возможности двухполюсной конструкции ограничены насыщением магнитопровода статора),
- попарно встречное включение обмоток соседних полюсов статора,
- блокирование конфигурации, в которой оси радиальной симметрии постоянных магнитов ротора совпадают с осями радиальной симметрии полюсов статора разноименной магнитной полярности, путем кратковременного снятия питания со всех обмоток полюсов статора,
- восстановление момента вращения на роторе после прохода им по инерции «мертвого» положения ротора путем перехода к альтернативной позиции коммутации.
Функциональная схема четырехполюсного варианта многополюсного вентильного электродвигателя с последовательным соединением секций и обмоток полюсов статора представлена на фиг. 6. Первичный и вторичные источники питания на схеме не показаны. Для предметного описания работы предлагаемого многополюсного вентильного электродвигателя в блок управления 4 включены комбинационная схема 40 формирования позиций коммутации при приведении ротора в положение для успешного пуска, комбинационная схема 41 формирования позиций коммутации при управлении пуском, разгоном и вращением, а также элементы 42 и 43, обеспечивающие выдачу позиций коммутации на входы мостового коммутатора 5. Мостовой коммутатор 5 представлен выполненным на полевых транзисторах T1-Т4 с драйверами верхних и нижних плеч (ДВП и ДНП соответственно).
Электродвигатель работает следующим образом. Пусть (см. фиг. 6) исходное положение ротора соответствует позиции 28 на фиг. 3. При подаче питания в датчике положения 3 активизируются чувствительные элементы 18, 19, 20 и 21 датчиков Холла (х=?, у=0, z1=1, z2=1), а в микроконтроллере 6 управление передается программе самоконтроля.
После успешного завершения микроконтроллером программы самоконтроля управление передается рабочей программе (РП). РП (см. фиг. 7) формирует направление вращения (u=1, например), режим работы (ν=0). По значению ν=0 комбинационная схема 40 определяет позицию коммутации для приведения ротора в положение для успешного пуска электродвигателя. В результате на верхнем по схеме выходе комбинационной схемы 40 появляется уровень логической единицы, который через верхний по схеме логический элемент 42 поступает на верхний по схеме элемент 43, подготавливая его к работе. РП опрашивает значение переменной z1 (уровень сигнала «Готов»). Поскольку ротор не находится в положении для успешного пуска (z1=1), то РП выдает на вторые входы элементов 43 сигнал ШИМ со скважностью, обеспечивающей среднее значение тока в обмотке статора необходимого для устойчивого вращения ротора, и ожидает доклада о готовности к пуску (z1=0). Сигнал ШИМ через верхний по схеме элемент 43 проходит на входы драйверов транзисторов Т1 и Т4 мостового коммутатора 5, транзисторы открываются. При этом выход коммутатора 5 подключен к обмотке статора так, что ток в обмотках полюсов создает на сторонах, обращенных к ротору, магнитную полярность N полюсов А и С и магнитную полярность S полюсов В и D. Одноименность магнитных полярностей всех противостоящих пар «постоянный магнит ротора - полюс статора» приводит к неустойчивости, в результате которой ротор изменяет свое положение. Пусть движение началось в направлении, соответствующем позиции 29 на фиг. 3. Движение в этом направлении (см. фиг. 8) приводит ротор в положение для успешного пуска, соответствующее позиции 30 на Фиг. 3. В результате значением z1=0 дезактивируется комбинационная схема 40, изменяется на 0 состояние верхнего по схеме ее выхода, закрываются транзисторы Т1 и Т4, отключая обмотку статора от источника питания. Полюса перестают создавать магнитное поле, а микроконтроллер значением z1=0 оповещается о готовности к успешному пуску.
РП, получив сигнал готовности к пуску, подает команду «Пуск», меняя уровень сигнала «Работа» (ν=1). В результате активируется комбинационная схема 41 блока управления 4 (см. фиг. 9), на нижнем по схеме ее выходе появляется уровень логической единицы, который поступает на нижний по схеме элемент 42, с его выхода - на нижний по схеме элемент 43, на его выходе появляется сигнал ШИМ, который проходит на входы драйверов транзисторов Т2 и Т3 мостового коммутатора 5, транзисторы открываются. В обмотке статора возникает периодический ток, среднее значение которого создает на сторонах, обращенных к ротору, магнитные полярности S полюсов А и С и магнитные полярности N полюсов В и D. За счет сил притяжения всех разноименных и отталкивания всех одноименных полюсов ротора на нем возникает момент правого вращения, который (см. фиг. 10) ведет ротор к «мертвому» положению. Однако отрицательные последствия «мертвого» положения ротора на технические характеристики электродвигателя и его работоспособность в целом значением у=0 блокируется путем закрытия транзисторов Т2 и Т3. Обмотка статора отключается от источника питания, полюса перестают создавать магнитное поле и ротор продолжает движение по инерции.
После прохода ротором «мертвого» положения (см. фиг. 11) значения х=1 и u=1 порождают 1 на верхнем по схеме выходе комбинационной схемы 41, открываются транзисторы Т1 и Т4, в результате чего на обращенных к ротору сторонах полюсов А и С статора устанавливаются магнитные полярности N, а на обращенных к ротору сторонах полюсов В и D - магнитные полярности S, обеспечивая восстановление на роторе момента вращения того же знака, что и ранее. В дальнейшем описанный выше цикл управления вращением повторяется.
Одновременное использование при управлении вращением обмоток всех полюсов статора приводит, в сравнении с прототипом, к увеличению момента вращения на роторе.
Реализация процессов перекоммутации и блокирования «мертвых» положений ротора аппаратурным способом способствует улучшению динамических характеристик предлагаемого вентильного электродвигателя.
Частота вращения ротора определяется нагрузкой и скважностью сигнала ШИМ.
Диапазон изменения частоты вращения сверху ограничивается нагрузкой, а снизу - сочетанием момента инерции ротора с межкоммутационным периодом (временем, в течение которого при вращении ротора по инерции происходит смена позиций коммутации).
Предлагаемый многополюсный вентильный электродвигатель может быть выполнен как по схеме «ротор внутри статора», так и по схеме «статор внутри ротора», что характерно для приводов транспортных средств.
Техническими результатами, достигаемыми при использовании предлагаемого изобретения, являются: повышение надежности пуска электродвигателя в любом из задаваемых направлений вращения путем принудительной выставки ротора в положение, в котором оси радиальной симметрии его постоянных магнитов расположены по середине между полюсами статора; увеличение момента вращения на роторе путем привлечения к его созданию всех полюсов статора и блокирования мертвых положений ротора; улучшение динамических характеристик электродвигателя путем аппаратурной реализации процесса коммутации питания обмотки статора; улучшение технологичности изготовления путем разработки нескольких схем соединения секций в обмотках полюсов и самих обмоток полюсов, позволяющих в рамках одной конструкции изготавливать типоряд вентильных электродвигателей с питанием от источников постоянного тока с различным напряжением, а также расширение области применения предлагаемого вентильного электродвигателя за счет расширения его функциональных возможностей реализацией режимов торможения и реверса.
Изобретение позволяет:
1) Повысить вероятность успешного пуска в любом из заданных направлений вращения.
2) Осуществлять плавный разгон ротора (форсированный разгон не исключается).
3) Стабилизировать частоту вращения ротора путем формирования микроконтроллером скважности ШИМ по результатам сравнения частоты сигнала по входу «F=4n» с заданным значением.
4) Выполнять торможение ротора с различной интенсивностью путем изменения в ходе работы электродвигателя позиций коммутации на противоположные и изменения скважности сигнала ШИМ.
5) Осуществлять реверс электродвигателя.
6) Расширить область применения вентильного электродвигателя за счет реализации дополнительных функциональных возможностей.
7) Использовать при проектировании и в производстве подходящих размеров магнитопроводы статоров серийно выпускаемых синхронных и асинхронных электрических машин, а также унифицировать технологию изготовления вентильных электродвигателей, рассчитанных на питание от сетей (источников) постоянного тока с различным напряжением.
Источники информации
1. Овчинников И.Е., Лебедев Н.И. Бесконтактные двигатели постоянного тока автоматических устройств. - М. - Л.: Наука, 1966. - 122 с.
2. Хрущев В.В. Электрические машины систем автоматики: Учебник для вузов. - 2-изд., перераб. и доп. - Л.: Энергоатомиздат. Ленингр. Отд-ние, 1985 - 368 с, ил.
3. Патент РФ №2453968 С2, опубл. 20.06.2012.
4. Патент РФ №2423775 С1, опубл. 10.07.2011.
5. Патент РФ №2153757 С1, опубл. 27.07.2000.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕРЕВЕРСИВНЫЙ БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1996 |
|
RU2103788C1 |
| ОДНОФАЗНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2010 |
|
RU2453968C2 |
| Способ настройки вентильного электродвигателя | 1986 |
|
SU1467687A1 |
| Вентильный электродвигатель-маховик с электромагнитным подвесом ротора | 1980 |
|
SU905950A1 |
| Однофазный вентильный торцовый двигатель | 1990 |
|
SU1742952A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2374090C1 |
| Вентильный электродвигатель | 1983 |
|
SU1141527A1 |
| Энергонезависимый датчик углового положения вала | 2024 |
|
RU2828613C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2025872C1 |
| НЕРЕВЕРСИВНЫЙ БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1996 |
|
RU2152681C1 |




Изобретение относится к электротехнике, а именно к вентильным электродвигателям. Многополюсный вентильный электродвигатель (фиг. 1 и 6), содержащий ротор 2 с кратным 4 количеством постоянных магнитов, неявнополюсный статор 1 с количеством полюсов, равным количеству постоянных магнитов на роторе, датчик положения ротора 3, блок управления 4, мостовой коммутатор 5 и микроконтроллер 6. Обмотки полюсов соединяются также однотипно с образованием обмотки статора, в которой обмотки соседних полюсов соединены попарно встречно. Датчик положения выполнен на четырех цифровых датчиках Холла, позволяющих определить две позиции коммутации при приведении ротора в положение для успешного пуска и в процессе работы электродвигателя, а также совпадения осей радиальной симметрии постоянных магнитов ротора и полюсов статора и положения ротора, обеспечивающего успешный пуск электродвигателя в заданном направлении вращения. Технический результат состоит в обеспечении надежного пуска электродвигателя в любом из задаваемых направлений вращения. 11 ил.
Многополюсный вентильный электродвигатель, содержащий ротор с четным количеством постоянных магнитов, установленных равномерно по его периферии с чередующейся полярностью, статор с электромагнитами, обеспечивающими создание крутящего момента взаимодействием с постоянными магнитами ротора, датчик положения ротора и средство перекоммутации питания электромагнитов, отличающийся тем, что в систему управления электродвигателем введен микроконтроллер, средство перекоммутации питания электромагнитов выполнено в виде мостового полупроводникового коммутатора; обмотки электромагнитов выполнены насыпными, многосекционными с укладкой секций в пазы магнитопровода статора с образованием его полюсов, при этом количество полюсов на роторе кратно 4 и равно количеству полюсов на статоре; секции обмоток полюсов соединены согласно и однотипно (последовательно, параллельно или сочетанием упомянутых способов); обмотки полюсов соединены также однотипно (одним из упомянутых выше способов) с образованием обмотки статора, в которой обмотки соседних полюсов соединены попарно встречно; датчик положения ротора выполнен на четырех цифровых датчиках Холла, чувствительные элементы которых закреплены на статоре согласованно с радиальными осями симметрии его полюсов, а задающие элементы - на оси вращения ротора согласованно с радиальными осями симметрии постоянных магнитов, при этом один задающий элемент датчика выполнен с возможностью определения одним из его чувствительных элементов двух позиций коммутации при приведении ротора в положение для успешного пуска, а другим - двух позиций коммутации при работе электродвигателя, другой задающий элемент датчика положения ротора выполнен с возможностью определения одним из его чувствительных элементов совпадения при вращении осей радиальной симметрии постоянных магнитов ротора и полюсов статора, а другим - положения ротора, обеспечивающего успешный пуск электродвигателя в любом из направлений вращения, выход датчика положения ротора соединен с входом блока управления, один выход которого соединен с входом микроконтроллера, выход которого соединен с другим входом блока управления; другой выход блока управления соединен с управляющим входом мостового коммутатора, одна диагональ выхода которого соединена с источником питания, а другая - с выводами обмотки статора.
| Синхронная машина | 1938 |
|
SU55370A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2009 |
|
RU2408127C1 |
| Синхронная неявнополюсная машина | 1976 |
|
SU758404A1 |
| JP 2008029114 A, 07.02.2008 | |||
| US 2009179514 A1, 16.07.2009 | |||
| US 4724350 A, 09.02.1998 | |||
| US 3230434 A, 18.01.1966 | |||
| СПОСОБ ЗАПУСКА ДИЗЕЛЬНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2403432C2 |

