Изобретение относится к измерительной технике и может быть использовано для определения абсолютных перемещений объектов, например, в металлургии, автомобильной промышленности, крановой технике, складской и производственной логистике, при автоматизации производства в целом.
При расширении масштабов решаемых задач на производстве важную роль играет повышение эффективности производственных процессов, которое достигается, в том числе, за счет быстрого и точного определения положения объектов в разные периоды времени на территории производственного помещения. Эффективное отслеживание перемещений объекта позволяет составить точную карту производственного процесса, например, в ночное время, что позволяет сократить количество задействованных сотрудников.
Известные способы измерения перемещений объекта основаны на перемещении преобразователя и источника сигнала относительно друг друга. Например, в дискретных системах сигнал от источника обрабатывается с получением значения перемещения объекта только в том случае, если он был воспринят преобразователем. Таким образом, точность определения положения объекта зависит от величины диапазона измерения перемещений преобразователя, которая, в свою очередь, зависит и ограничивается зоной чувствительности преобразователя.
Известен способ измерения перемещения объекта (JP 0850004, 20.02.1996 г.), согласно которому источник сигнала - магнит - устанавливают на объект, вдоль траектории его перемещения размещают преобразователи - датчики Холла, на которые подают ток возбуждения, при движении объекта с датчиков Холла снимают значения напряжения и далее вычисляют значение перемещений объекта.
Недостатками данного способа является невысокая точность измерения и ограничение диапазона измерения перемещений объекта зоной чувствительности преобразователей. Помимо этого, для измерения перемещений необходимо проложить электрический кабель к каждому датчику Холла для обеспечения его питания и снятия сигнала. Последний факт существенно усложняет систему измерения.
Известны способы измерения перемещений объекта (RU 2125235, 20.01.1999 г., RU 2117914, 20.08.1998 г.), согласно которым преобразователь устанавливают на перемещаемый объект, ультразвуковые волны распространяют от источников, расположенных вдоль траектории перемещения объекта, измеряют время распространения сигнала от источников до преобразователей и по его значению судят о величине линейного перемещения объекта.
Недостатками указанных способов является невозможность измерения положения объекта за пределами зоны чувствительности преобразователя, что не позволяет измерять перемещения объекта на значительные расстояния и тем самым ограничивает применение в производстве.
Известен способ измерения перемещений объекта (RU 2196300, 10.01.2003 г.), согласно которому преобразователь - фотоприемник устанавливают на перемещаемом объекте, через оптическую систему на него направляют световой сигнал от источников, расположенных вдоль траектории перемещения объекта, по выходному сигналу фотоприемника судят о величине перемещения объекта.
Недостатками данного способа является невысокая точность, так как значение величины перемещения объекта зависит от расположения, величины и интенсивности светового пятна на фотоприемнике. С помощью данного способа также невозможно измерять перемещения объекта на значительные расстояния. К тому же, для реализации указанного способа используется дополнительное оборудование (оптическая система, дополнительный фотоприемник для учета нестабильности светового потока излучателя), что создает неудобства при использовании и приводит к дополнительным затратам при определении перемещения объекта.
Известен способ определения абсолютных перемещений объекта (RU 93003536, 10.08.1995 г.), согласно которому на маску и на измерительную шкалу наносят несколько рядов идентичных щелей таким образом, чтобы периоды расположения щелей не имели общих делителей, маску располагают на перемещаемом объекте, измерительную шкалу устанавливают вдоль траектории перемещения объекта, при прохождении объекта с маской вдоль измерительной шкалы с заданным периодом меняют интенсивность света, проходящего через щели измерительной шкалы и маски, причем значения долей периода каждого ряда не имеют целых общих делителей, определяют абсолютное значение перемещения объекта. Данный способ позволяет теоретически увеличить диапазон измерения перемещений объекта за счет уникальности периодов маски и измерительной шкалы в любой промежуток времени, однако нанесение делителей на маску и измерительную шкалу является трудоемким и неудобным, поэтому практически измерять перемещения объекта на значительные расстояние не представляется возможным. К тому же точность указанного определения перемещения зависит от интенсивности получаемых световых пятен после прохождения через щели маски, в связи чем является невысокой.
Известен способ измерения перемещений объекта (RU 1820209, 07.06.1993 г.), принятый за наиболее близкий аналог к рассматриваемому способу, заключающийся в том, что преобразователь - фоточувствительный прибор с зарядовой связью - устанавливают на перемещаемый объект, вдоль траектории перемещения объекта располагают источники сигнала - осветительную линейку, формируют сигналы - лучи света, расстояние между которыми не превышает длины преобразователя, осуществляют циклический опрос преобразователя, источники сигнала включают в заданной последовательности по одному в каждом цикле опроса преобразователя, прекращают перебор включения источников сигнала при получении выходного сигнала, преобразуют выходной сигнал, определяют номер источника сигнала и по нему определяют перемещение объекта.
Данный способ позволяет увеличить измеряемое расстояние, на которое можно переместить объект. Однако в этом случае, за счет перебора включаемых источников сигнала, до момента появления выходного сигнала в целом увеличивается время определения величины перемещения объекта. Точность измерения перемещений объекта при данном способе так же, как и в аналогах, зависит от зоны чувствительности преобразователя.
Задачей изобретения является увеличение расстояния, на которое можно переместить объект, и создание способа, позволяющего измерить данное перемещение с помощью магнитострикционного преобразователя.
Техническим результатом является повышение точности измерения перемещений объекта, повышение скорости обработки информации от преобразователя перемещений и выдачи данных о положении объекта и/или преобразователя.
Технический результат достигается при использовании способа измерений перемещений, заключающегося в том, что магнитострикционный преобразователь перемещений устанавливают на объект, вдоль траектории перемещения объекта устанавливают магниты и/или электромагниты, на каждом участке траектории обеспечивают расстановку магнитов и/или электромагнитов, определяемую изменением количества магнитов и/или электромагнитов и/или расстояния между любыми двумя магнитами и/или электромагнитами, направляют сигнал на движущийся объект с магнитострикционным преобразователем перемещений, принимают выходной сигнал с магнитострикционного преобразователя перемещений о положении магнитов и/или электромагнитов, находящихся в его диапазоне измерения, определяют положение объекта и/или преобразователя, измеряют перемещение на расстоянии, превышающем длину активной зоны магнитострикционного преобразователя.
Расстановка магнитов и/или электромагнитов, определяемая изменением количества магнитов и/или электромагнитов и/или расстояния между любыми двумя магнитами и/или электромагнитами, позволяет получить неповторяющиеся уникальные комбинации данных источников сигнала на любом участке траектории движения объекта, что обеспечивает однозначную идентификацию положения магнитострикционного преобразователя перемещений в любой момент времени и далее позволяет максимально точно определить положение объекта при его движении, повысить точность измерения перемещений объекта, а также увеличить расстояние, на которое его можно переместить.
Неповторимые комбинации магнитов и/или электромагнитов на каждом участке траектории перемещения объекта могут определяться только изменением количества данных источников сигнала. В данном случае в зоне чувствительности магнитострикционного преобразователя перемещений будет располагаться уникальная комбинация из разного количества источников сигнала, которая позволит однозначно идентифицировать положение объекта и/или преобразователя и определить его перемещение. При этом расстояние, на которое перемещают объект, превышает длину активной зоны магнитострикционного преобразователя.
Неповторимые комбинации магнитов и/или электромагнитов на каждом участке траектории перемещения объекта могут определяться только изменением расстояния между любыми двумя указанными источниками сигнала. В данном случае возможна расстановка магнитов и/или электромагнитов в любом 1D-, 2D-, 3D-, nD-измерении, где n - целое число. В любом положении магнитострикционного преобразователя перемещений в зоне его чувствительности будет располагаться уникальная комбинация из одного и того же количества магнитов и/или электромагнитов, расположенных в пространстве без повторений, что позволит однозначно идентифицировать положение объекта и определить его перемещение.
Понятие n-мерного измерения в математике является известным (например, https://ru.wikipedia.org/wiki/Евклидово_пространство). N-мерное измерение реализуется, например, посредством n осей (где n - целое число), пересекающихся в одной точке пространства - нуле. При этом угол между двумя любыми осями может отличаться от 90 градусов. N-мерное пространство при n, равном пяти, реализуется, например, в пятиосевом обрабатывающем центре, у которого реализована пятикоординатная база для относительного движения инструмента и объекта обработки (http://www.alfastanki.ru/equipment/litz/section.php?unit=606).
То есть для расстановки источников сигнала в любом nD-измерении (где n - целое число) необходимо, например, выбрать единую точку - нуль и относительно нее расставить источники сигнала по выбранному количеству направлений движения.
Также неповторимые комбинации магнитов и/или электромагнитов на каждом участке траектории перемещения объекта могут определяться как изменением количества указанных источников сигнала, так и изменением расстояния между любыми двумя указанными источниками сигнала. В данном случае в зоне чувствительности магнитострикционного преобразователя перемещений будет располагаться уникальная комбинация из разного количества источников сигнала в любом 1D-, 2D-, 3D-, nD-измерении с разным расстоянием между любыми двумя источниками сигнала, что также позволит однозначно идентифицировать положение объекта и определить его перемещение.
Получение неповторяющихся комбинаций магнитов и/или электромагнитов позволяет определять не только положение и перемещение объекта и/или преобразователя, но и безошибочно идентифицировать номера магнитов и/или электромагнитов и другие их параметры в случае необходимости.
В качестве преобразователей также могут быть также использованы различные конструкции, содержащие магнитострикционные преобразователи.
В качестве источников сигнала могут быть также использованы элементы, содержащие магниты и/или электромагниты, конструкции, содержащие магниты/электромагниты.
Обработка выходного сигнала с магнитострикционного преобразователя перемещений обеспечивается соответствующей аппаратурой. Информация для обработки может быть передана по различным интерфейсам и протоколам, например, по аналоговому интерфейсу, TCP/IP, 10-Link, ASInterface, Profinet, Profibus, DeviceNet, CANopen, EtherCAT, Ethernet, Varan.
При использовании данного способа возможно с высокой точностью получить информацию о месте и времени нахождения объекта в производственном процессе, что повышает эффективность управления производством.
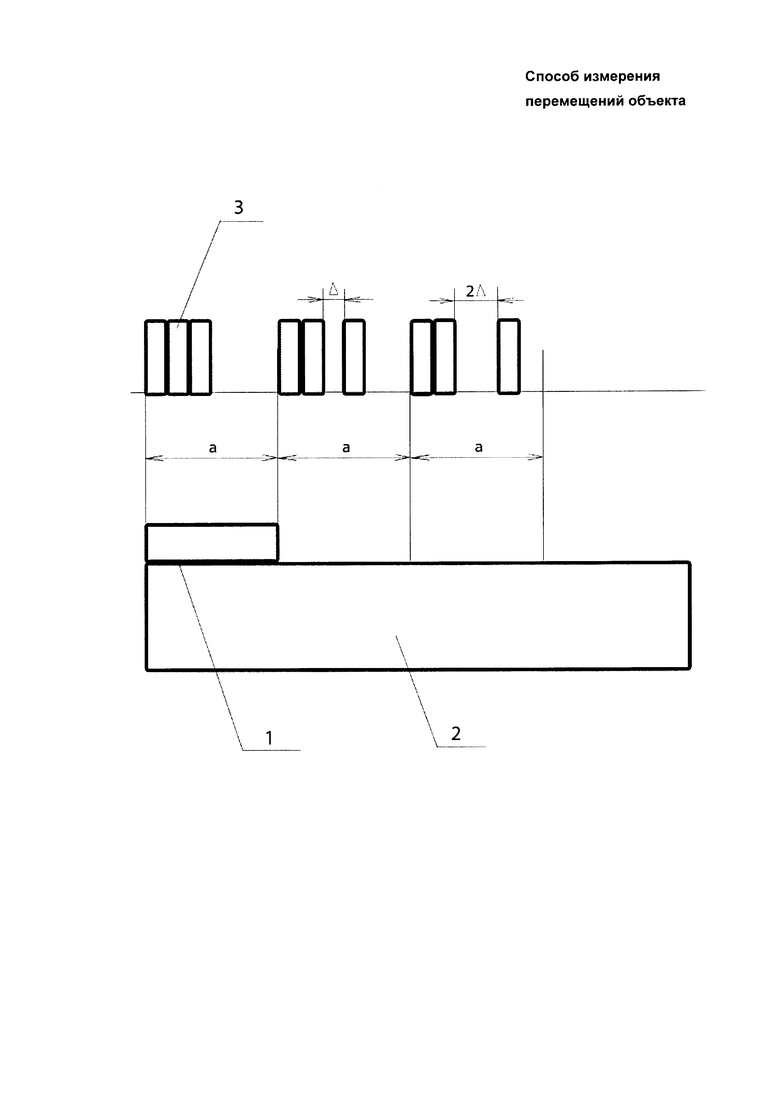
На чертеже представлено устройство для реализации заявляемого способа измерения перемещений объекта, которое содержит магнитострикционный преобразователь перемещений 1, расположенный на объекте 2, магниты и/или электромагниты 3, установленные вдоль траектории движения объекта 2 таким образом, чтобы в каждой точке траектории расстановка магнитов и/или электромагнитов 3 была уникальной, определяемой изменением количества магнитов и/или электромагнитов 3 и/или расстояния между любыми двумя магнитами и/или электромагнитами 3.
На объект перемещения устанавливают магнитострикционный преобразователь линейных перемещений 1, имеющий диапазон измерения перемещений а, вдоль траектории перемещения объекта размещают магниты и/или электромагниты 3. Рассмотрим случай, когда на каждом участке траектории а используется одно и то же количество магнитов и/или электромагнитов 3, но изменяется расстояние между двумя магнитами и/или электромагнитами (см. чертеж). То есть на первом участке траектории, равном диапазону измерения а магнитострикционного преобразователя перемещений 1, магниты и/или электромагниты 3 располагают вплотную друг к другу с образованием первого уникального набора, на втором аналогичном отрезке траектории длиной а располагают второй набор магнитов и/или электромагнитов 3, в котором, например, крайний правый магнит и/или электромагнит 3 отодвинут на расстояние Δ, на третьем аналогичном отрезке траектории длиной а располагают третий набор магнитов и/или электромагнитов 3, в котором, например, крайний правый магнит и/или электромагнит 3 отодвинут на расстояние 2Δ и т.д. Получаем, что на любом участке траектории напротив зоны чувствительности преобразователя располагается неповторяющаяся комбинация источников сигнала, которая позволяет однозначно идентифицировать положение объекта и определить его перемещение. При этом расстояние, на которое перемещают объект, превышает длину активной зоны магнитострикционного преобразователя.
Также магниты и/или электромагниты 3 на каждом участке траектории, равном диапазону измерения а магнитострикционного преобразователя перемещений 1, можно расположить так, чтобы расстояние между магнитами и/или электромагнитами 3 оставалось одинаковым, но изменялось их количество, то есть на первом участке траектории можно разместить два магнита и/или электромагнита 3, на втором участке - три магнита и/или электромагнита 3 и т.д. В данном случае на любом отрезке траектории напротив зоны чувствительности магнитострикционного преобразователя 1 будет располагаться неповторяющаяся комбинация источников сигнала, которая позволит однозначно идентифицировать положение объекта и определить его перемещение. При этом расстояние, на которое перемещают объект, также превышает длину активной зоны магнитострикционного преобразователя.
Также возможен вариант размещения магнитов и/или электромагнитов 3 на любом участке траектории, равном диапазону измерения а магнитострикционного преобразователя перемещений 1, когда изменяется как количество магнитов и/или электромагнитов 3, так и расстояние между любыми двумя магнитами и/или электромагнитами 3, то есть на первом участке траектории, располагают, например, два магнита и/или электромагнита 3 с расстоянием Δ между ними, на втором участке траектории располагают три магнита и/или электромагнита 3 с расстоянием Δ между первым и вторым магнитом и/или электромагнитом 3 и расстоянием 2Δ между вторым и третьи магнитом и/или электромагнитом 3 и т.д., в данном случае также обеспечивается однозначная идентификация положения объекта и его перемещения. При этом расстояние, на которое перемещают объект, также превышает длину активной зоны магнитострикционного преобразователя.
Данные по уникальному расположению источников сигнала заранее заносятся в аппаратуру, обрабатывающую выходной сигнал. При движении объекта вдоль траектории с расставленными магнитами и/или электромагнитами 3 магнитострикционный преобразователь 1 выдает значение положения каждого из магнитов и/или электромагнитов 3, напротив которых расположен объект с установленным на нем магнитострикционным преобразователем перемещений 1. Полученные значения передаются в обрабатывающую аппаратуру, которая производит сравнение с занесенными ранее данными о расположении магнитов и/или электромагнитов 3 и определяет положение объекта и его перемещение.
По выходному сигналу с магнитострикционного преобразователя перемещений 1 можно также определить номера источников сигнала, воздействие с которых было оказано на данный преобразователь перемещений, и любые другие параметры источников сигнала, если существует такая необходимость.
Увеличение расстояния, на которое возможно переместить объект можно вычислить следующим образом. Например, в качестве магнитострикционного преобразователя линейных перемещений используют преобразователь фирмы Balluff GmbH, величина нелинейности которого составляет 30 мкм, диапазон измерения равен 4500 мм. Если использовать данный преобразователь, два источника сигнала с учетом изменения расстояния между ними на 31 мкм на каждом отрезке траектории, и учитывать то, что минимально необходимое расстояние между магнитами и/или электромагнитами должно быть не менее 60 мм, то возможно получить:

уникальных положений указанных источников сигналов.
Таким образом, суммарный диапазон измерений при использовании двух магнитов и/или электромагнитов составляет:

с точностью 30 мкм.
В итоге, способ измерений перемещений объекта позволяет повысить точность измерения перемещений объекта при значительном увеличении расстояния, на которое можно переместить объект. При этом повышается скорость анализа информации, полученной от магнитострикционного преобразователя, повышается скорость определения положения объекта и его перемещения по производственной территории, что обеспечивает повышение эффективности производственного процесса в целом. Также для измерения перемещений необходимо обеспечить питанием только один магнитострикционный преобразователь перемещений, установленный на объекте, что упрощает способ измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2015 |
|
RU2594669C1 |
| АДАПТИВНЫЙ СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 2016 |
|
RU2623829C1 |
| Система измерения перемещения объектов | 2020 |
|
RU2780421C1 |
| СПОСОБ КОНТРОЛЯ УРОВНЯ ЖИДКОСТИ В РЕЗЕРВУАРАХ ПО ХАРАКТЕРИСТИКАМ ВОЛН ЛЭМБА И УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ УРОВНЯ ЖИДКОСТИ В РЕЗЕРВУАРАХ | 2020 |
|
RU2739562C1 |
| ТРАНСПОРТИРОВАНИЕ ОБЪЕКТА ПО ПОВЕРХНОСТИ | 2013 |
|
RU2588458C2 |
| ТРАНСПОРТИРОВАНИЕ ОБЪЕКТА ПО ПОВЕРХНОСТИ | 2013 |
|
RU2590883C2 |
| ТРАНСПОРТИРОВАНИЕ ОБЪЕКТА ПО ПОВЕРХНОСТИ | 2009 |
|
RU2543406C2 |
| ТРАНСПОРТИРОВАНИЕ ОБЪЕКТА ПО ПОВЕРХНОСТИ | 2013 |
|
RU2573348C2 |
| МАГНИТОСТРИКЦИОННЫЙ КОДОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2297506C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2008 |
|
RU2374608C1 |
Изобретение относится к измерительной технике и может быть использовано для определения абсолютных перемещений объектов. Способ измерений перемещений содержит этапы, на которых магнитострикционный преобразователь перемещений устанавливают на объект, вдоль траектории перемещения объекта устанавливают магниты и/или электромагниты, на каждом участке траектории обеспечивают расстановку магнитов и/или электромагнитов, определяемую изменением количества магнитов и/или электромагнитов и/или расстояния между любыми двумя магнитами и/или электромагнитами, направляют сигнал на движущийся объект с магнитострикционным преобразователем перемещений, принимают выходной сигнал с магнитострикционного преобразователя перемещений о положении магнитов и/или электромагнитов, находящихся в его диапазоне измерения, определяют положение объекта и/или преобразователя, измеряют перемещение на расстоянии, превышающем длину активной зоны магнитострикционного преобразователя. Технический результат - повышение точности измерения перемещений объекта, повышение скорости обработки информации от преобразователя перемещений и выдачи данных о положении объекта и/или преобразователя. 2 з.п. ф-лы, 1 ил.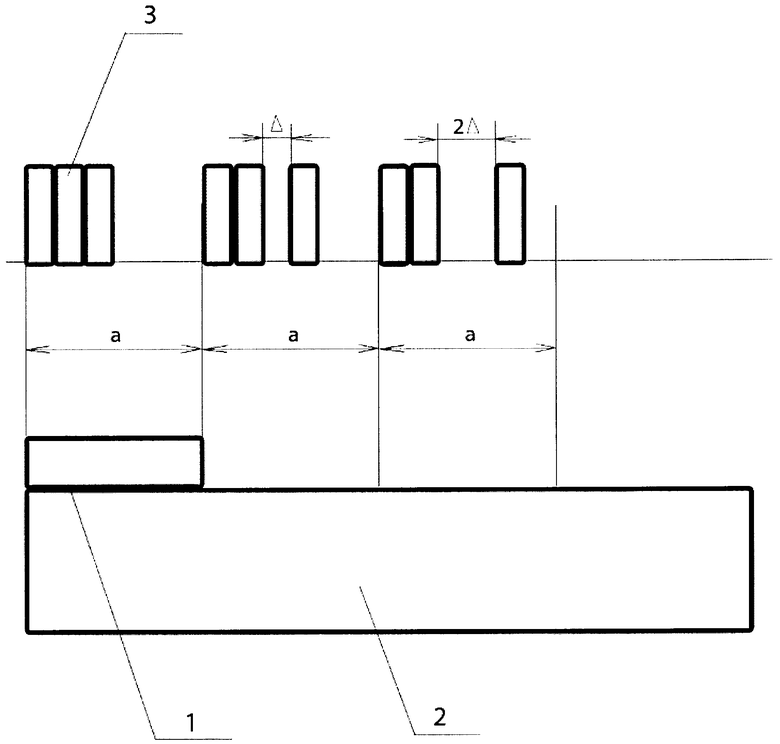
1. Способ измерений перемещений, заключающийся в том, что магнитострикционный преобразователь перемещений устанавливают на объект, вдоль траектории перемещения объекта устанавливают магниты и/или электромагниты, на каждом участке траектории обеспечивают расстановку магнитов и/или электромагнитов, определяемую изменением количества магнитов и/или электромагнитов и/или расстояния между любыми двумя магнитами и/или электромагнитами, направляют сигнал на движущийся объект с магнитострикционным преобразователем перемещений, принимают выходной сигнал с магнитострикционного преобразователя перемещений о положении магнитов и/или электромагнитов, находящихся в его диапазоне измерения, определяют положение объекта и/или преобразователя, измеряют перемещение на расстоянии, превышающем длину активной зоны магнитострикционного преобразователя.
2. Способ по п. 1, заключающийся в том, что расстановка магнитов и/или электромагнитов реализована в любом 1D-, 2D-, 3D-, nD-измерении.
3. Способ по п. 1, заключающийся в том, что по выходному сигналу с преобразователя перемещений определяют номер магнита и/или электромагнита.
| RU 2007117670 A, 20.11.2008;RU 2374608 C1, 27.11.2009;RU 2436037 C1, 10.12.2011;US 6208131 B1, 27.03.2001;US 9074860 B2, 07.07.2015. |

