Изобретение относится к измерительной технике и может быть применено в системах измерения линейного перемещения.
Известен способ измерения линейных перемещений (А.С. СССР №1739190, МКИ5 G01B 17/00, 1992 г.), заключающийся в том, что на концах звукопровода устанавливают первый и второй акустоэлектрические преобразователи, подвижный электроакустический преобразователь располагают между ними и соединяют с объектом измерения, подвижным электроакустическим преобразователем возбуждают ультразвуковую волну в звукопроводе, принимают ультразвуковые колебания акустоэлектрическими преобразователями, определяют время распространения ультразвуковой волны до них, а по отношению одного из этих времен к их сумме судят о величине линейных перемещений, перед измерением устанавливают подвижный электроакустический преобразователь поочередно в двух произвольно заданных точках на звукопроводе, в каждой точке возбуждают ультразвуковую волну и измеряют время ее распространения до акустоэлектрических преобразователей, рассчитывают величину смещения первого и второго акустоэлектрических преобразователей с учетом аддитивной погрешности по формуле
 ,
,
где k - масштабный коэффициент;
tx1, ty1 - измерительный и дополнительный интервалы времени в первичной точке измерения;
tx2 - измерительный интервал времени во второй точке измерения;
х1, х2 - расстояние между подвижным электроакустическим преобразователем и неподвижным измерительным акустоэлектрическим преобразователем в первой и второй точках измерения соответственно, а первый и второй акустоэлектрические преобразователи перед измерением устанавливают в соответствии с полученным смещением так, что знак "плюс" соответствует смещению к электроакустическому преобразователю, а знак "минус" - от него.
Известен также способ измерения линейных перемещений (Патент RU №2125235, МКИ G01B 17/00, 1999 г.), заключающийся в том, что при измерении линейных перемещений измеряют время распространения ультразвуковой волны от неподвижного элемента возбуждения до подвижного элемента считывания, соединенного с контролируемым объектом, и по значению этого времени судят о величине линейного перемещения объекта, перед измерением времени распространения ультразвуковой волны устанавливают подвижный элемент считывания на самое близкое расстояние к неподвижному элементу возбуждения и измеряют образцовую длительность импульса ультразвуковой волны, а после перемещения подвижного элемента считывания вместе с контролируемым объектом на измеряемое расстояние перед каждым измерением времени распространения ультразвуковой волны измеряют рабочую длительность импульса ультразвуковой волны, вычитают ее из образцовой длительности и по значению полученной разности определяют величину тока подвижного элемента возбуждения. Кроме того, перед каждым циклом измерения в приемной части устанавливают пороговое напряжение, в k раз большее напряжения шума, где k - коэффициент, определяемый требованиями к помехоустойчивости, а результирующее время распространения ультразвуковой волны от зоны возбуждения до зоны считывания tx, пропорциональное измеряемому перемещению, определяют из выражения:
 ,
,
где t′i и t′′i - моменты срабатывания порогового устройства приемной части при приеме импульсов ультразвуковой волны соответственно передним и задним фронтам этих импульсов;
n - число импульсов ультразвуковой волны, определяемое требованиями к точности и быстродействию.
Недостатком приведенных аналогов является невысокая точность из-за наличия в результате преобразования погрешности, причиной возникновения которой является непостоянство значения скорости распространения ультразвуковой волны по длине звукопровода.
Наиболее близким по технической сущности и достигаемому результату к заявляемому является способ измерения перемещений (А.С. СССР №1252667, МКИ4 G01B 17/00, 1986 г.), заключающийся в том, что возбуждают в звукопроводе магнитострикционного преобразователя катушкой возбуждения с постоянным магнитом ультразвуковые колебания и принимают их катушкой приема с неподвижным и подвижным магнитами, измеряют время распространения ультразвуковых колебаний от катушки возбуждения до катушки приема с постоянным магнитом, сравнивают последнее с образцовым временным интервалом, изменяют частоту ультразвуковых колебаний катушки возбуждения до момента совпадения сравниваемых временных интервалов и измеряют время распространения ультразвукового импульса от катушки возбуждения до катушки приема с подвижным магнитом, по которому определяют искомый параметр.
Недостатком прототипа также является невысокая точность из-за наличия в результате преобразования составляющей погрешности, причиной возникновения которой является непостоянство значения скорости распространения ультразвуковой волны по длине звукопровода.
Техническим результатом изобретения является повышение точности измерения линейного перемещения за счет коррекции составляющей погрешности, вызванной непостоянством значения скорости распространения ультразвуковой волны по длине звукопровода.
Технический результат достигается тем, что в способе измерения линейного перемещения возбуждают ультразвуковые колебания в звукопроводе магнитострикционного преобразователя постоянными магнитами и импульсом тока, подаваемым в звукопровод, и принимают их акустоэлектрическими преобразователями, расположенными на концах звукопровода, в отличие от прототипа первый и второй постоянные магниты фиксируют относительно друг друга на расстоянии, которое приблизительно равняется некоторому исходному значению тестовой величины линейного расстояния, располагают первый и второй постоянные магниты между первым и вторым акустоэлектрическими преобразователями таким образом, чтобы первый и второй постоянные магниты с возможностью перемещения передвигались вдоль звукопровода и первый постоянный магнит был ближе к первому акустоэлектрическому преобразователю, чем второй постоянный магнит, в режиме первичной калибровки перемещают первый и второй постоянные магниты из положения нижнего предела в положение верхнего предела измеряемого диапазона перемещения первого постоянного магнита, одновременно с помощью калиброванного средства измерения временных интервалов периодически измеряют времена распространения ультразвуковых волн, возбужденных под первым постоянным магнитом, до первого и второго акустоэлектрических преобразователей, время между моментами достижения первого акустоэлектрического преобразователя ультразвуковыми волнами, возбужденными под первым и вторым постоянными магнитами, и время между моментами достижения второго акустоэлектрического преобразователя ультразвуковыми волнами, возбужденными под первым и вторым постоянным магнитами, составляют первую таблицу зависимости времени между моментами достижения первого акустоэлектрического преобразователя ультразвуковыми волнами, возбужденными под первым и вторым постоянными магнитами, от времени распространения ультразвуковой волны, возбужденной под первым постоянным магнитом, до первого акустоэлектрического преобразователя, составляют вторую таблицу зависимости времени между моментами достижения второго акустоэлектрического преобразователя ультразвуковыми волнами, возбужденными под первым и вторым постоянным магнитами, от времени распространения ультразвуковой волны, возбужденной под первым постоянным магнитом, до второго акустоэлектрического преобразователя, устанавливают первый и второй постоянные магниты в четыре различных реперных положения, измеряют координату первого постоянного магнита в реперных положениях с помощью образцового средства измерений линейного перемещения, измеряют времена распространения ультразвуковых волн, возбужденных под первым постоянным магнитом в реперных положениях, до первого и второго акустоэлектрических преобразователей, на основе первой и второй таблиц, измеренных координат первого постоянного магнита в реперных положениях и измеренных времен распространения ультразвуковой волны, возбужденной под первым постоянным магнитом в реперных положениях, до первого и второго акустоэлектрических преобразователей, вычисляют точное значение расстояния между первым и вторым постоянными магнитами, которое принимается в качестве значения тестовой величины линейного расстояния, и значения нижнего и верхнего пределов диапазона измеряемого перемещения первого постоянного магнита, составляют третью таблицу зависимости значения координаты положения первого постоянного магнита от времени распространения ультразвуковой волны, возбужденной под первым постоянным магнитом, до первого акустоэлектрического преобразователя, и четвертую таблицу зависимости значения координаты положения первого постоянного магнита от времени распространения ультразвуковой волны, возбужденной под первым постоянным магнитом, до второго акустоэлектрического преобразователя, в режиме измерения измеряют времена распространения ультразвуковых волн, возбужденных под первым постоянным магнитом, до первого и второго акустоэлектрических преобразователей, время между моментами достижения первого акустоэлектрического преобразователя ультразвуковыми волнами, возбужденными под первым и вторым постоянными магнитами, и время между моментами достижения второго акустоэлектрического преобразователя ультразвуковыми волнами, возбужденными под первым и вторым постоянными магнитами, по третьей и четвертой таблицам определяют значение координаты положения первого постоянного магнита, обновляют значения первой, второй, третьей и четвертой таблиц.
Сущность изобретения поясняется чертежами. На фиг.1 изображена структурная схема устройства, реализующего способ измерения линейного перемещения. На фиг.2 - временные диаграммы сигналов устройства за один цикл работы. На фиг.3 - исходная погрешность аппроксимации статической характеристики преобразователя прямой линией. На фиг.4 - график распределения погрешности МПП по диапазону преобразования моделирования.
Устройство для реализации способа содержит первичный магнитострикционный преобразователь 1 перемещения, состоящий из звукопровода 2, выполненного из магнитострикционного материала, первого и второго акустических демпферов 3 и 4, расположенных на противоположных концах звукопровода 2, первого и второго акустоэлектрических преобразователей 7 и 8, расположенных на левом и правом концах звукопровода 2 соответственно, первого и второго постоянных магнитов 5 и 6, перемещающихся вдоль звукопровода 2, соединенных кинематически с объектом контроля и находящихся относительно друг друга на расстоянии, которое приблизительно равняется некоторому исходному значению тестовой величины линейного перемещения, подаваемой на вход магнитострикционного преобразователя перемещения, располагают первый и второй постоянные магниты 5 и 6 между первым и вторым акустоэлектрическими преобразователями 7 и 8 таким образом, чтобы первый и второй постоянные магниты 5 и 6 перемещались вдоль звукопровода и первый постоянный магнит 5 был ближе к первому акустоэлектрическому преобразователю 7, чем второй постоянный магнит 6, микропроцессорную систему 9, одновибратор 10, генератор 11 тока возбуждения, первый и второй усилители-формирователи 12 и 13, преобразователь 14 временных интервалов в код и последовательный интерфейс 15 связи.
Устройство для реализации способа измерения линейного перемещения работает следующим образом.
Во всех режимах работы устройства выполняется единый цикл. Каждый цикл работы начинается в момент времени t0 с формирования импульса напряжения на выходе "Старт" микропроцессорной системы (МПС) (фиг.2, а). По этому импульсу напряжения одновибратор 10 формирует (фиг.2,б) прямоугольный импульс напряжения калиброванной длительности, который поступает на вход генератора 11 тока возбуждения (ГТВ). На выходе ГТВ 11 формируется импульс тока возбуждения той же длительности, который проходит через звукопровод 2 и замыкается на общий провод. Импульс магнитного поля, формирующийся при прохождении импульса тока по звукопроводу 2, взаимодействует с магнитными полями первого и второго постоянных магнитов 5 и 6, и в звукопроводе 2 под местом положения этих постоянных магнитов вследствие эффекта Видемана возбуждаются две ультразвуковые волны крутильной механической деформации, которые распространяются вдоль звукопровода 2 влево и вправо. Одновременно по импульсу напряжения с выхода "Старт" МПС 9 начинает работу ПВИК 14. Импульс напряжения калиброванной длительности с выхода одновибратора 10 поступает одновременно на входы блокировки первого и второго усилителей-формирователей (УФ) 12 и 13, и сигнальные входы усилителей-формирователей закрываются на время, равное длительности этого импульса напряжения.
Через интервал времени
 ,
,
после возбуждения ультразвуковых волн, где τ1 - задержка распространения сигнала в первом усилителе-формирователе 12, хизм - измеряемое значение координаты положения объекта контроля, в момент достижения места расположения первого акустоэлектрического преобразователя (АЭП) 7 ультразвуковой волной, возбужденной под первым постоянным магнитом 5, в обмотке первого АЭП 7 наводится первый импульс ЭДС (фиг.2, в), который преобразуется первым усилителем-формирователем (УФ) 12 в прямоугольный импульс напряжения (фиг.2, г) цифрового уровня, который поступает на вход "Стоп 1" ПВИК 14. Через некоторое время, которое зависит от используемого в ПВИК 14 метода измерения временных интервалов, на n-разрядной шине ПВИК появляется цифровой код (фиг.2, ж) результата преобразования длительности интервала времени tx1:
 ,
,
где Е(·) - целая часть выражения, tp - разрешающая способность по времени, а на выходе "Готовность кода" ПВИК 14 в момент времени t1 формируется прямоугольный импульс напряжения (фиг.2, з). По этому импульсу напряжения МПС 9 считывает код Nx1.
Через интервал времени
 ,
,
после возбуждения ультразвуковых волн, в момент достижения места расположения первого АЭП 7 ультразвуковой волной, возбужденной под вторым постоянным магнитом 6, в обмотке первого АЭП 7 наводится второй импульс ЭДС (фиг.2, в), который преобразуется первым УФ 13 в прямоугольный импульс напряжения (фиг.2, г) цифрового уровня, который поступает на вход "Стоп 2" ПВИК 14. Через некоторое время на n-разрядной шине ПВИК 14 появляется цифровой код (фиг.2, ж) результата преобразования длительности интервала времени tx2:
 ,
,
а на выходе "Готовность кода" ПВИК 14 в момент времени t2 формируется прямоугольный импульс напряжения (фиг.2, з). По этому импульсу напряжения МПС 9 считывает код Nx2.
Через интервал времени

после возбуждения ультразвуковых волн, где τ2 - задержка распространения сигнала во втором усилителе-формирователе 13, xmax - максимальное возможное значение координаты положения объекта контроля, когда второй постоянный магнит 6 находится над вторым АЭП 8, в момент достижения места расположения второго АЭП 8 ультразвуковой волной, возбужденной под вторым постоянным магнитом 6, в обмотке второго АЭП 8 наводится импульс ЭДС (фиг.2, д), который преобразуется вторым УФ 13 в прямоугольный импульс напряжения (фиг.2, е) цифрового уровня, который поступает на вход "Стоп 2" ПВИК 14. Через некоторое время на n-разрядной шине ПВИК 14 появляется цифровой код (фиг.2, ж) результата преобразования длительности интервала времени tx3:
 ,
,
а на выходе "Готовность кода" ПВИК 14 в момент времени t3 формируется прямоугольный импульс напряжения (фиг.2, з). По этому импульсу напряжения МПС 9 считывает код Nx3.
Через интервал времени

после возбуждения ультразвуковых волн, в момент достижения места расположения второго АЭП 8 ультразвуковой волной, возбужденной под первым постоянным магнитом 6, в обмотке второго АЭП 8 наводится импульс ЭДС (фиг.2, д), который преобразуется вторым УФ 13 в прямоугольный импульс напряжения (фиг.2, е) цифрового уровня, который поступает на вход "Стоп 2" ПВИК 14. Через некоторое время на n-разрядной шине ПВИК 14 появляется цифровой код (фиг.2, ж) результата преобразования длительности интервала времени tx4:
 ,
,
на выходе "Готовность кода" ПВИК 14 в момент времени t4 формируется прямоугольный импульс напряжения (фиг.2, з). По этому импульсу напряжения МПС 9 считывает код Nx4. При дальнейшем распространении ультразвуковые волны достигают первого и второго акустических демпферов 3 и 4 и рассеиваются на них.
На этом цикл работы устройства заканчивается.
Значения кода Nx1 изменяются от минимального
 ,
,
где t′x1min - минимальное значение длительности интервала времени tx1, равное времени, на которое закрывается сигнальный вход первого УФ 12 при возбуждении УЗ волны, до максимального
 ,
,
где

- максимальная длительность интервала времени tx1 при координате первого постоянного магнита 5 хизм=xmax. Значения кода Nx2 изменяются от минимального

где

- минимальное значение интервала времени tx2, соответствующее координате положения первого постоянного магнита 5, равной хизм=0, до максимального
 ,
,
где

- максимальное значение длительности интервала времени tx2, соответствующее координате первого постоянного магнита 5 хизм=xmax. Значение кода Nx3 изменяется от максимального
 ,
,
где

максимальное значение длительности интервала времени tx3, соответствующее координате первого постоянного магнита 5 хизм=0, до минимального

где t′x3изм - минимальное значение длительности интервала времени tx3, равное времени, на которое закрывается сигнальный вход второго УФ 13 при возбуждении ультразвуковой волны. Значение кода Nx4 изменяется до максимального

где

максимальное значение длительности интервала времени tx4, соответствующее координате положения первого постоянного магнита 5 хизм=0, до минимального значения
 ,
,
где

минимальное значение длительности интервала времени tx4, соответствующее координате положения первого постоянного магнита 5 хизм=xmax. Условно принято, что минимальное значение непрерывного диапазона изменения кода Nx1 равняется
 ,
,
где
tx1min=τ1.
Точно так же условное минимальное значение непрерывного диапазона изменения кода Nx3 равняется

где
tx3min=τ2.
Значения кода Nx1 обозначаются в виде
Nxl=Nxlmin+(i-1),
где i - целое положительное число. Значения кодов Nx2, Nx3 и Nx4, полученные МПС 9 в том же цикле работы, что и код Nx1i, обозначаются соответственно Nx2i, Nx3i и Nx4i.
Весь диапазон изменения значения кода Nx1 от Nx1min до Nx1max условно делится на поддиапазоны. Нижняя и верхняя границы любого j-го поддиапазона значения кода
Nx1, где j - целое положительное число, определяются по выражениям:


где К - целое положительное число. Таким образом, количество поддиапазонов кода Nxl равняется
 ,
,
а их протяженность, за исключением последнего, равняется К.
Аналогично диапазон изменения значения кода Nx3 от Nx3max до Nx3min делится на поддиапазоны и нижняя и верхняя границы любого j-го поддиапазона изменения значений кода Nx3 определяются выражениями:


Количество поддиапазонов значений кода Nx3 равняется

После включения устройство работает в двух режимах: первичная калибровка и измерение. Во время обоих режимов работы МПС 9 периодически выполняет единые циклы работы и считывает значения кодов, формируемых на n-разрядной шине ПВИК 14. В случае если значение кода Nx1, полученное в текущем цикле преобразования, принадлежит подинтервалу, имеющему номер j, не совпадающий с номером подинтервала, которому принадлежит значение кода Nx1i, полученное в предыдущем цикле преобразования, то МПС 9 вычисляет величину
 ,
,
которая несет информацию о времени прохождения ультразвуковой волной участка звукопровода 2, начало и окончание которого совпадают с местом расположения первого и второго постоянных магнитов 5 и 6 соответственно и имеют некоторые координаты xi и (xi+xT). Величина NxTj ставится в соответствие значению кода Nx1i. Если первый постоянный магнит 5 попадает в зону нечувствительности первого АЭП 7, т.е. интервал времени, за который ультразвуковая волна проходит от первого постоянного магнита 5 до первого АЭП 7 меньше, чем время, на которое закрывается сигнальный вход первого УФ 12 при возбуждении УЗ волны, то МПС 9 запоминает значения кодов Nx3i и Nx4i после каждого цикла.
В режиме первичной калибровки устройства первый и второй постоянные магниты 5 и 6 перемещаются в точку нижнего предела измеряемого диапазона перемещения так, чтобы первый постоянный магнит 5 был расположен над первым АЭП 7. Далее первый и второй постоянные магниты 5 и 6 перемещаются вдоль звукопровода 2 в точку верхнего предела диапазона преобразования так, чтобы второй постоянный магнит 6 был расположен над вторым АЭП 8. Причем нижний и верхний пределы измеряемого диапазона перемещения являются пределами перемещения первого постоянного магнита. Затем первый и второй постоянные магниты 5 и 6 перемещаются в четыре произвольные точки с известными координатами хизм, равными хобр1, хобр2, хобр3, хобр4. После каждого перемещения через интерфейс 15 связи в МПС 9 передается координата этой точки. МПС 9 запоминает значения хобр1, хобр2, хобр3 и хобр4, а также значения Nx1oбpl, Nx1oбp2,
Nx1oбp3 и Nx1oбp4 кода Nx1, соответствующие этим положениям первого постоянного магнита 5.
Далее МПС 9 вычисляет значения величины NxTj для всех поддиапазонов значений кода Nx1, входящих в интервал значений от Nx1min до N′x1min:
 ,
,
где значение кода Nx4i для каждого j-го подинтервала выбирается из условия

где N′x1 и N′x4 - значения кодов Nx1i и Nx4i, полученных МПС 9 в одном любом цикле преобразования при условии, что Nx1i>N′x1min.
Затем МПС 9 составляет систему из четырех уравнений вида

 ,
,
 - значения
- значения  средней скорости распространения ультразвуковой волны на участках звукопровода 2 с координатами начала и конца xi и (xi+xT), вычисляемые для каждого j-го поддиапазона значений кода Nx1 по выражению
средней скорости распространения ультразвуковой волны на участках звукопровода 2 с координатами начала и конца xi и (xi+xT), вычисляемые для каждого j-го поддиапазона значений кода Nx1 по выражению
 ,
,
р и q - соответственно максимальное и минимальное из значений индекса k, удовлетворяющих условию
k≤j<k+NxTk
или
Nx1k≤Nx1j<Nx1k+NxTk;
 ,
,
m=i-n·K,

коэффициент, исключающий накопление погрешности квантования интервалов времени с увеличением индекса i, у - аддитивная поправка, приводящая начало отсчета значений х′i к точке положения первого АЭП 7 с координатой хизм=0, VУЗ=3000 м/с - значение скорости крутильной ультразвуковой волны в звукопроводе.
В полученную систему уравнений подставляются значения xoбp1, хобр2, хобр3, хобр4, Nx1oбp1, Nxloбp2, Nx1oбp3 и Nx1oбp4, и она решается микропроцессорной системой 9 относительно хт, τ1, τ2 и у. На этом режим первичной калибровки завершается, и устройство переходит в режим измерения, в котором после каждого цикла преобразования МПС 9 по выражению (1) вычисляет величину х′i, которая является результатом последнего преобразования перемещения, не содержащим погрешность от неоднородности скорости ультразвуковой волны, и передается по интерфейсу 15 связи. В случае если распределение скорости ультразвуковой волны VУ3(x) изменяется, то некоторые значения величин NxTj, полученных в предыдущих циклах преобразования, заменяются новыми, найденными после изменения распределения VУ3(x), и результат преобразования линейного перемещения, вычисляемый по формуле (1), также не содержит погрешности от неоднородности скорости ультразвуковой волны вдоль звукопровода.
Пример конкретной реализации способа.
На основе данного способа было произведено моделирование статической характеристики (СХ) устройства. Для получения исходных данных моделирования было учтено распределение погрешности магнитострикционного преобразователя перемещений со звукопроводом диаметром 1 мм из сплава 44НХ5МТ при аппроксимации СХ прямой линией в диапазоне преобразования 0…1 м. [Надеев А.И., Кононенко СВ. Процессорная характеристика магнитострикционного преобразователя перемещений, Измерительная техника, 1999, №5 с.29-30]. График исходной погрешности аппроксимации статической характеристики преобразователя прямой линей представлен на Фиг.3. Исходное распределение погрешности было введено в компьютер в виде значений, взятых через интервалы длиной 0,025 м. Моделирование было выполнено в виде трех серий, в каждой из которых исследование проводилось при различных значениях одного из параметров: разрешающей способности по времени tp, интервала времени tV (значения коэффициента К) и расстояния а между постоянными магнитами 5 и 6. Значение погрешности находилось как отклонение значений Xi промежуточных точек полученной СХ преобразователя от характеристики, принимавшейся в качестве реальной. При значениях параметров моделирования tp=10 нс, К=10 и а=0.01 м максимальное значение погрешности преобразования уменьшается примерно в 30 раз и не превышает 0.005% от диапазона преобразования. График распределения погрешности МПП по диапазону преобразования моделирования со значениями параметров моделирования tp=10 нс, а=0.01 м и различных значениях tV: 1 - tV=100 нс (К=10); 2 - tV=500 нс (К=50) приведен на Фиг.4.
Итак, заявленное изобретение позволяет повысить точность измерения линейного перемещения за счет коррекции составляющей погрешности, вызванной непостоянством значения скорости распространения ультразвуковой волны по длине звукопровода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ В РЕЗЕРВУАРЕ | 2005 |
|
RU2306532C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347187C1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2171967C2 |
| МАГНИТОСТРИКЦИОННЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2010 |
|
RU2452918C2 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1992 |
|
RU2080559C1 |
| МАГНИТОСТРИКЦИОННЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2007 |
|
RU2343645C2 |
| СПОСОБ КАЛИБРОВКИ МАГНИТОСТРИКЦИОННЫХ ПРЕОБРАЗОВАТЕЛЕЙ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2584577C1 |
| МИКРОПРОЦЕССОРНЫЙ МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОЛОЖЕНИЯ В КОД | 1999 |
|
RU2175754C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2117914C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2391626C1 |


Изобретение относится к измерительной технике и может быть применено в системах измерения линейного перемещения. Техническим результатом изобретения является повышение точности измерения линейного перемещения. Предложенный способ предусматривает коррекцию составляющей погрешности, вызванной непостоянством значения скорости распространения ультразвуковой волны по длине звукопровода. 4 ил.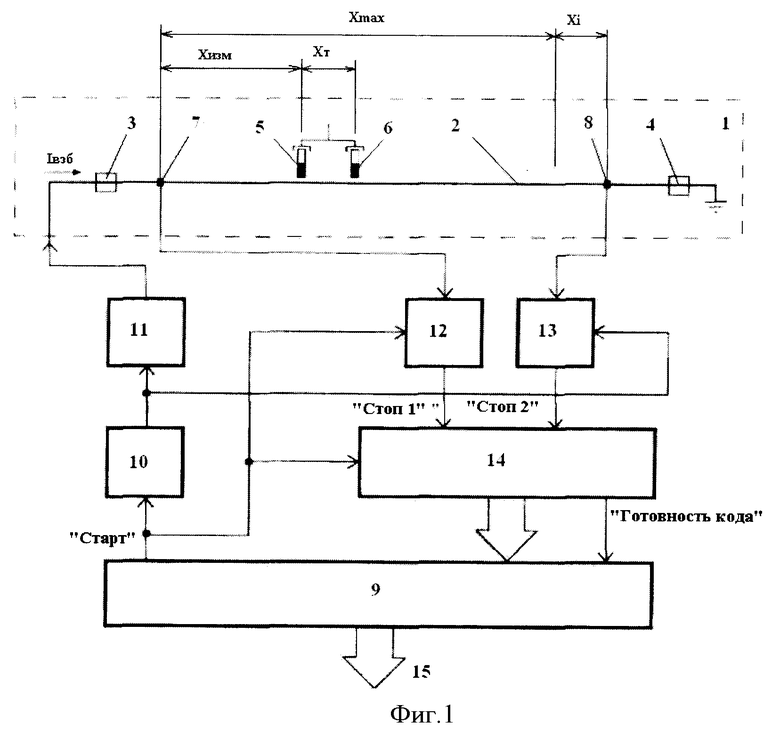
Способ измерения линейного перемещения, заключающийся в том, что возбуждают ультразвуковые колебания в звукопроводе магнитострикционного преобразователя первым и вторым постоянными магнитами и импульсом тока, подаваемым в звукопровод, и принимают их электроакустическими преобразователями, расположенными на концах звукопровода, отличающийся тем, что первый и второй постоянные магниты фиксируют относительно друг друга на расстоянии, которое приблизительно равняется некоторому исходному значению тестовой величины линейного расстояния, располагают первый и второй постоянные магниты между первым и вторым акустоэлектрическими преобразователями таким образом, чтобы первый и второй постоянные магниты с возможностью перемещения передвигались вдоль звукопровода и первый постоянный магнит был ближе к первому акустоэлектрическому преобразователю, чем второй постоянный магнит, в режиме первичной калибровки перемещают первый и второй постоянные магниты из положения нижнего предела в положение верхнего предела измеряемого диапазона перемещения первого постоянного магнита, одновременно с помощью калиброванного средства измерения временных интервалов периодически измеряют времена распространения ультразвуковых волн, возбужденных под первым постоянным магнитом, до первого и второго акустоэлектрических преобразователей, время между моментами достижения первого акустоэлектрического преобразователя ультразвуковыми волнами, возбужденными под первым и вторым постоянными магнитами, и время между моментами достижения второго акустоэлектрического преобразователя ультразвуковыми волнами, возбужденными под первым и вторым постоянными магнитами, составляют первую таблицу зависимости времени между моментами достижения первого акустоэлектрического преобразователя ультразвуковыми волнами, возбужденными под первым и вторым постоянными магнитами, от времени распространения ультразвуковой волны, возбужденной под первым постоянным магнитом, до первого акустоэлектрического преобразователя, составляют вторую таблицу зависимости времени между моментами достижения второго акустоэлектрических преобразователей ультразвуковыми волнами, возбужденными под первым и вторым постоянными магнитами, от времени распространения ультразвуковой волны, возбужденной под первым постоянным магнитом, до второго акустоэлектрических преобразователей, устанавливают первый и второй постоянные магниты в четыре различных реперных положения, измеряют координату первого постоянного магнита в реперных положениях с помощью образцового средства измерений линейного перемещения, измеряют времена распространения ультразвуковых волн, возбужденных под первым постоянным магнитом в реперных положениях, до первого и второго акустоэлектрических преобразователей, на основе первой и второй таблиц, измеренных координат первого постоянного магнита в реперных положениях и измеренных времен распространения ультразвуковой волны, возбужденной под первым постоянным магнитом в реперных положениях, до первого и второго акустоэлектрических преобразователей, вычисляют точное значение расстояния между первым и вторым постоянными магнитами, которое принимается в качестве значения тестовой величины линейного расстояния, и значения нижнего и верхнего пределов диапазона измеряемого перемещения первого постоянного магнита, составляют третью таблицу зависимости значения координаты положения первого постоянного магнита от времени распространения ультразвуковой волны, возбужденной под первым постоянным магнитом, до первого акустоэлектрического преобразователя, и четвертую таблицу зависимости значения координаты положения первого постоянного магнита от времени распространения ультразвуковой волны, возбужденной под первым постоянным магнитом, до второго акустоэлектрического преобразователя, в режиме измерения измеряют времена распространения ультразвуковых волн, возбужденных под первым постоянным магнитом, до первого и второго акустоэлектрических преобразователей, время между моментами достижения первого акустоэлектрического преобразователя ультразвуковыми волнами, возбужденными под первым и вторым постоянными магнитами, и время между моментами достижения второго акустоэлектрического преобразователя ультразвуковыми волнами, возбужденными под первым и вторым постоянными магнитами, по третьей и четвертой таблицам определяют значение координаты положения первого постоянного магнита, обновляют значения первой, второй, третьей и четвертой таблиц.
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ | 2004 |
|
RU2271515C1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1992 |
|
RU2080559C1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2171967C2 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2093789C1 |
| US 2003146747 A1, 07.08.2003 | |||
| JP 2004205321 A, 22.07.2004. | |||

