ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ И УРОВЕНЬ ТЕХНИКИ
Данное изобретение относится к системе привода, соответствующей преамбуле п. 1 формулы изобретения, и способу приведения транспортного средства в движение, соответствующему преамбуле п. 11 формулы изобретения.
Использование обычного механизма сцепления, который отсоединяет входной вал коробки передач от двигателя внутреннего сгорания во время процессов переключения передач в коробке передач, влечет за собой недостатки. Когда неподвижное транспортное средство начинает двигаться, диски механизма сцепления скользят друг по другу. Вследствие этого, обеспечивается нагревание дисков. Это нагревание приводит к возрастающему расходу топлива и износу дисков сцепления. Обычный механизм сцепления является относительно массивным и дорогостоящим. Он также занимает относительно большое пространство в транспортном средстве. Использование гидравлического преобразователя момента также приводит к потерям.
Привод гибридных транспортных средств могут осуществлять первичный двигатель, который может быть двигателем внутреннего сгорания, и вторичный двигатель, который может быть электрической машиной. Электрическая машина снабжена, по меньшей мере, одним средством аккумулирования энергии, предназначенным для аккумулирования электрической энергии, и регулирующим оборудованием для регулирования потока электрической энергии между средством аккумулирования энергии и электрической машиной. Вследствие этого, электрическая машина может попеременно работать как электродвигатель и генератор в зависимости от рабочего состояния транспортного средства. Когда тормозят транспортное средство, электрическая машина генерирует электрическую энергию, которую аккумулируют в аккумуляторе энергии. Аккумулированную электрическую энергию можно впоследствии использовать, например, для приведения транспортного средства в движение и эксплуатации различных вспомогательных систем в транспортном средстве.
В шведской патентной заявке SE 1051384-4, которая еще не опубликована, показана гибридная система привода с планетарной передачей, которая содержит три компонента, а именно солнечное зубчатое колесо, водило планетарной шестерни и кольцевое зубчатое колесо. Один из трех компонентов планетарной передачи соединен с выходным валом двигателя внутреннего сгорания, второй компонент планетарной передачи соединен с входным валом коробки передач, а третий компонент планетарной передачи соединен с ротором электрической машины. Электрическая машина соединена с аккумулятором энергии таким образом, что она попеременно может работать как электродвигатель и генератор. Скоростью вращения электрических машин можно управлять ступенчато. Управляя скоростью вращения электрической машины, можно придавать входному валу коробки передач желаемую скорость вращения. При наличии гибридной системы, соответствующей SE 1051384-4, в цепи привода транспортного средства не нужно использовать механизм сцепления.
Момент двигателя внутреннего сгорания и момент электрической машины вместе обеспечивают движущий момент транспортного средства. Вместе с тем, двигатель внутреннего сгорания часто используют для эксплуатации разных узлов в транспортном средстве. Есть также неопределенность, касающаяся конструкции компонентов, входящих в состав двигателя внутреннего сгорания, износа, старения и т.д. Другими факторами, затрудняющими определение момента, который двигатель внутреннего сгорания подает для работы, а значит - и движущего момента транспортного средства, являются качество топлива, температура топлива и температура двигателя внутреннего сгорания. Вместе с тем, важно, что двигатель внутреннего сгорания обеспечивает требуемый момент с высокой точностью в определенных рабочих состояниях, например, таких, как в случаях переключения передач в коробке передач и выключения планетарной передачи.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Задача данного изобретения состоит в том, чтобы разработать систему привода для транспортного средства того типа, которая упомянута вначале и в которой момент двигателя внутреннего сгорания для приведения транспортного средства в движение можно определить с высокой точностью.
Эта задача решается с помощью системы привода того типа, которая упомянута вначале и отличается признаками, которые изложены в отличительной части п. 1 формулы изобретения. Когда приводят в движение транспортное средство в соответствии с преамбулой п. 1 формулы изобретения, водитель воплощает свой запрос на требуемый крутящий момент, нажимая педаль акселератора. Блоку управления требуется момент, который должна подавать электрическая машина, и момент, который должен подавать двигатель внутреннего сгорания, чтобы транспортное средство получило момент, запрашиваемый водителем. Блок управления может управлять подходящим механизмом управления, который подводит электрическую энергию к электрической машине и отводит эту энергию из упомянутой машины таким образом, что она подает определенный момент для приведения транспортного средства в движение. Механизм управления может подводить ток к электрической машине и отводить его из нее с такой фазой и амплитудой, что электрическая машина подает требуемый момент. При необходимости, можно также измерять фазу и амплитуду подаваемого тока, чтобы гарантировать, что электрическая машина подает требуемый момент. Момент, который электрическая машина подает для приведения транспортного средства в движение, в большинстве случаев можно определять с очень высокой точностью.
В планетарной передаче существует корреляционная зависимость между моментами входящих в эту передачу компонентов, которая определяется количеством зубьев соответствующих компонентов. Поскольку каждый из таких агрегатов, как электрическая машина и двигатель внутреннего сгорания, соединен с одним компонентом планетарной передачи, можно вычислить момент двигателя внутреннего сгорания с учетом знания момента электрической машины. С помощью вычисляемого момента двигателя внутреннего сгорания достигается более точное определение подаваемого момента двигателя внутреннего сгорания, чем в случае, если бы подаваемый момент двигателя внутреннего сгорания был основан на более традиционной информации, такой, как количество впрыскиваемого топлива и т.д. Такое точное определение подаваемого момента двигателя внутреннего сгорания можно использовать во многих контекстах.
В соответствии с вариантом осуществления данного изобретения, блок управления выполнен с возможностью сравнения вычисляемого момента двигателя внутреннего сгорания с требуемым моментом двигателя внутреннего сгорания в некоторой первой рабочей ситуации. Таким образом, вычисляемый момент двигателя внутреннего сгорания дает более надежную информацию о подаваемом моменте двигателя внутреннего сгорания, чем требуемый момент двигателя внутреннего сгорания. Следовательно, двигатель внутреннего сгорания не всегда обеспечивает требуемый момент с высокой точностью. Сравнивая вычисляемый момент двигателя внутреннего сгорания с требуемым моментом двигателя внутреннего сгорания, можно определить возможное расхождение между подаваемым моментом двигателя внутреннего сгорания и требуемым моментом двигателя внутреннего сгорания.
В соответствии с вариантом осуществления данного изобретения, блок управления выполнен с возможностью сохранения информации, касающейся расхождения между вычисляемым моментом двигателя внутреннего сгорания и требуемым моментом двигателя внутреннего сгорания в упомянутой первой рабочей ситуации, и использования этой хранимой информации для управления двигателем внутреннего сгорания во вторых рабочих ситуациях. В этом случае, сохраняют информацию о возможном расхождении между вычисляемым моментом двигателя внутреннего сгорания и требуемым моментом двигателя внутреннего сгорания. Зная о возможном таком расхождении, можно с этого момента управлять двигателем внутреннего сгорания таким образом, что это расхождение устраняется или, по меньшей мере, явно снижается. Блок управления может регулировать объем впрыскиваемого топлива таким образом, что это расхождение устраняется.
В соответствии с вариантом осуществления данного изобретения, блок управления выполнен с возможностью сохранения информации, касающейся расхождения между вычисляемым моментом двигателя внутреннего сгорания и требуемым моментом двигателя внутреннего сгорания в разных рабочих состояниях двигателя внутреннего сгорания. Расхождение, которое существует между требуемым моментом двигателя внутреннего сгорания и подаваемым моментом двигателя внутреннего сгорания, изменяется с высокой вероятностью в разных рабочих состояниях. Это расхождение может изменяться с изменением рабочих параметров, таких, как скорость вращения и момент двигателя внутреннего сгорания. Поэтому приемлемым является сохранение информации, в которой сообщается о том, как изменяется расхождение с изменением разных рабочих параметров. С помощью такой информации, подаваемый момент двигателя внутреннего сгорания можно определять с высокой точностью, по существу, во всех рабочих состояниях двигателя внутреннего сгорания.
В соответствии с вариантом осуществления изобретения, блок управления выполнен с возможностью дополнения и/или обновления упомянутой хранимой информации, касающейся расхождения между вычисляемым моментом двигателя внутреннего сгорания и требуемым моментом двигателя внутреннего сгорания в течение последующих первых рабочих ситуаций. Причина, по которой двигатель внутреннего сгорания не подает требуемый момент с желаемой точностью, часто заключается в том, что он также эксплуатирует несколько вспомогательных узлов в транспортном средстве, выполненных в виде насоса охлаждающей жидкости, вентилятора системы охлаждения, компрессора оборудования переменного тока и т.д. Когда работа вспомогательных узлов, обеспечиваемая двигателем внутреннего сгорания, изменяется, например, со временем и изменением температуры окружающей среды, оказывается удобным относительно частое дополнение и/или обновление хранимой информации, касающейся расхождения между вычисляемым моментом двигателя внутреннего сгорания и требуемым моментом двигателя внутреннего сгорания. Другие причины, по которым двигатель внутреннего сгорания не подает требуемый момент, могут зависеть от факторов, которые связаны с компонентами, подающими топливо, качеством и температурой топлива.
В соответствии с вариантом осуществления изобретения, блок управления выполнен с возможностью использования вычисляемого момента двигателя внутреннего сгорания для управления двигателем внутреннего сгорания во вторых рабочих ситуациях, когда требуется, чтобы двигатель внутреннего сгорания подавал требуемый момент с высокой точностью. В определенных рабочих ситуациях важно, в частности, чтобы двигатель внутреннего сгорания подавал требуемый момент с высокой точностью. Такая рабочая ситуация возникает, когда надо отключить передачу от коробки передач. Чтобы сделать это, нужно создать безмоментное состояние в коробке передач. Зная подаваемый момент двигателя внутреннего сгорания с высокой точностью, можно проводить процесс отключения передачи быстрее и точнее.
В соответствии с вариантом осуществления изобретения, планетарная передача содержит сочленяющий элемент, с которым можно блокировать выходной вал двигателя внутреннего сгорания и входной вал коробки передач относительно друг друга, а блок управления выполнен с возможностью определения вычисляемого момента двигателя внутреннего сгорания в первых рабочих ситуациях, когда сочленяющий элемент находится в неблокированном положении, в котором упомянутые валы вращаются с разными скоростями вращения. На практике, можно вычислять момент двигателя внутреннего сгорания во всех рабочих ситуациях, когда сочленяющий элемент находится в неблокированном положении. Вместе с тем, выгодно вычислять момент двигателя внутреннего сгорания в определенных рабочих ситуациях транспортного средства, когда момент двигателя внутреннего сгорания можно вычислить при значительном разбросе скорости вращения и момента. Такие рабочие ситуации могут возникать, когда транспортное средство начинает двигаться при неблокированной планетарной передаче, при переключении передач в транспортном средстве и когда транспортное средство приводится в движение с относительно малыми моментами в то время, как двигатель внутреннего сгорания работает на холостом ходу.
В соответствии с вариантом осуществления изобретения, блок управления выполнен с возможностью вычисления момента, который двигатель внутреннего сгорания подает для приведения транспортного средства в движение, с помощью таких параметров, как передаточное отношение между выходным валом двигателя внутреннего сгорания и электрической машиной в планетарной передаче, момент инерции электрической машины, ускорение электрической машины, момент инерции двигателя внутреннего сгорания и ускорение двигателя внутреннего сгорания. В рабочих ситуациях, в которых выходной вал двигателя внутреннего сгорания и электрическая машина вращаются с постоянными скоростями вращения, между двигателем внутреннего сгорания и электрической машинной получается некоторое распределение моментов, которое определяется передаточным отношением между упомянутыми компонентами в планетарной передаче. В рабочих ситуациях, в которых электрическая машина изменяет скорости вращения, приходится учитывать изменение скорости вращения (ускорение) и момента инерции электрической машины, чтобы получить возможность вычислять момент двигателя внутреннего сгорания. Момент инерции электрической машины - это известный параметр. Изменение скорости вращения электрической машины можно определить по разнице скорости вращения в двух моментах времени. В рабочих ситуациях, в которых двигатель внутреннего сгорания изменяет скорость вращения, приходится соответствующим образом учитывать изменение скорости вращения (ускорение) и момент инерции двигателя внутреннего сгорания, чтобы получить возможность вычислять момент двигателя внутреннего сгорания. Момент инерции двигателя внутреннего сгорания - это известный параметр. Изменение скорости вращения двигателя внутреннего сгорания можно определить по разнице в скорости вращения в двух моментах времени. Таким образом, вычисление момента двигателя внутреннего сгорания оказывается относительно простым, поскольку можно с высокой точностью определить или оценить другие параметры.
В соответствии с другим предпочтительным вариантом осуществления изобретения, выходной вал двигателя внутреннего сгорания соединен с солнечным зубчатым колесом планетарной передачи, входной вал коробки передач соединен с водилом планетарной шестерни планетарной передачи, а ротор электрической машины соединен с кольцевым зубчатым колесом планетарной передачи. При такой компоновке входящим в нее компонентам можно придать компактную конструкцию. Солнечное зубчатое колесо и водило планетарной шестерни можно соединить с выходным валом двигателя внутреннего сгорания и входным валом коробки передач, соответственно, с помощью шпоночных соединений или аналогичных соединений. Тем самым гарантируется, что солнечное зубчатое колесо вращается с такой же самой скоростью вращения, как выходной вал двигателя внутреннего сгорания, и что водило планетарной шестерни вращается с такой же самой скоростью вращения, как входной вал коробки передач. Ротор электрической машины может быть закреплен на внешней периферийной поверхности кольцевого зубчатого колеса. Внутренняя периферийная поверхность кольцевого зубчатого колеса обычно снабжена зубьями. Внешняя периферийная поверхность кольцевого зубчатого колеса обычно является гладкой и очень хорошо подходит для придания опоры ротору электрической машины. Вследствие этого кольцевое зубчатое колесо и ротор электрической машины образуют единый вращающийся узел. В альтернативном варианте, ротор электрической машины можно соединить с кольцевым зубчатым колесом посредством трансмиссии. Однако возможно и соединение выходного вала двигателя внутреннего сгорания, входного вала коробки передач и ротора электрической машины с любым из других компонентов планетарной передачи.
Упомянутая вначале задача решается также посредством способа по пп. 13-24 формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже будет приведено описание предпочтительных вариантов осуществления изобретения в качестве примеров со ссылками на прилагаемые чертежи, при этом:
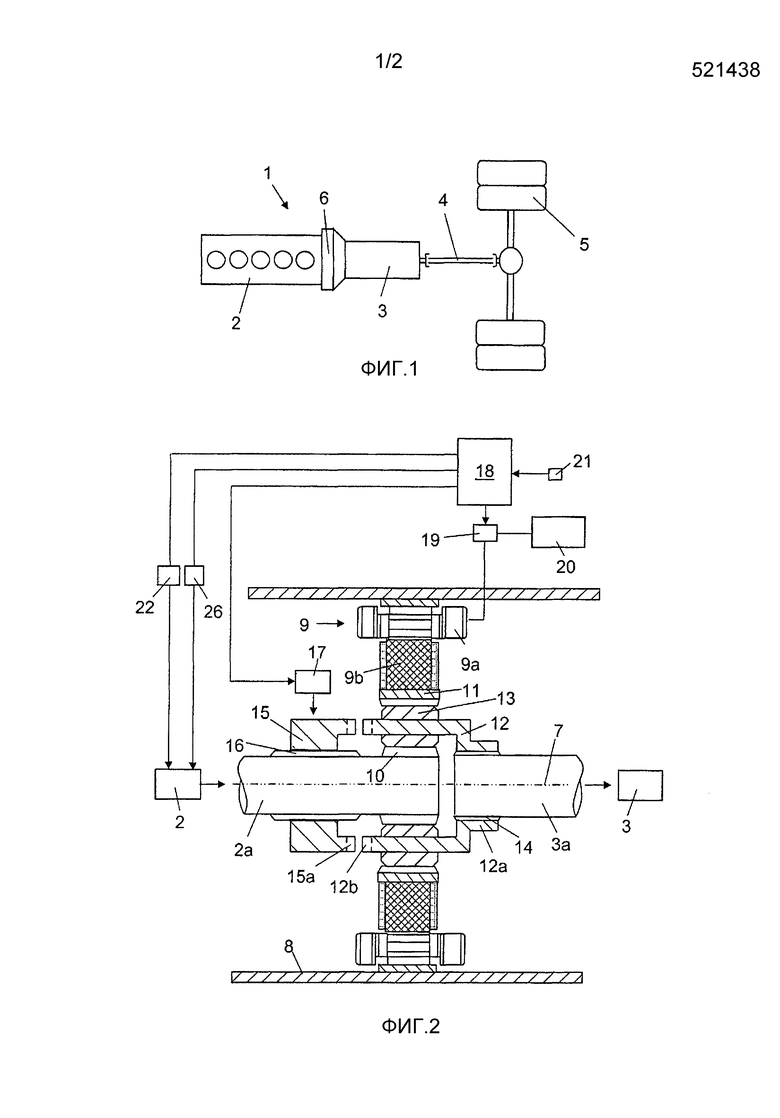
на фиг. 1 показана линия привода транспортного средства с системой привода в соответствии с данным изобретением;
на фиг. 2 система привода показана подробнее; и
на фиг. 3 представлена блок-схема последовательности операций, иллюстрирующая способ в соответствии с изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На фиг. 1 показана линия привода для большегрузного транспортного средства 1. Линия привода содержит двигатель 2 внутреннего сгорания, коробку 3 передач, некоторое количество ведущих валов 4 и ведущих колес 5. Между двигателем 2 внутреннего сгорания и коробкой 3 передач расположена промежуточная часть 6. На фиг. 2 промежуточная часть 6 показана подробнее. Двигатель 2 внутреннего сгорания снабжен выходным валом 2a, а коробка 3 передач - входным валом 3a на промежуточном участке 6. Выходной вал 2a двигателя внутреннего сгорания расположен соосно по отношению к входному валу 3a коробки передач. Выходной вал 2a двигателя внутреннего сгорания и входной вал 3a коробки передач расположены с возможностью вращения вокруг общей оси 7 вращения. Промежуточная часть 6 содержит кожух 8, окружающий электрическую машину 9 и планетарную передачу. Электрическая машина 9 содержит, как обычно, статор 9a и ротор 9b. Статор 9a содержит сердечник статора, закрепленный должным образом внутри кожуха 8. Сердечник статора содержит обмотки статора. Электрическая машина 9 выполнена с возможностью использования - в определенных рабочих состояниях - аккумулированной электрической энергии для приложения движущей силы к входному валу 3а коробки передач и использования - в других рабочих состояниях - кинетической энергии входного вала 3a коробки передач для отбора и аккумулирования электрической энергии.
Планетарная передача расположена, по существу, радиально внутри статора 9a и ротора 9b электрической машины. Планетарная передача содержит, как обычно, солнечное зубчатое колесо 10, кольцевое зубчатое колесо 11 и водило 12 планетарной шестерни. Водило 12 планетарной шестерни несет некоторое количество зубчатых колес (сателлитов) 13, расположенных с возможностью вращения в радиальном пространстве между зубьями солнечного зубчатого колеса 10 и кольцевого зубчатого колеса 11. Солнечное зубчатое колесо 10 крепится на периферийной поверхности выходного вала 2a двигателя внутреннего сгорания. Солнечное зубчатое колесо 10 и выходной вал 2a двигателя внутреннего сгорания в данном случае расположены с возможностью вращения как единое целое с первой скоростью n1 вращения. Водило 12 планетарной шестерни содержит крепежный участок 12a, который крепится на периферийной поверхности входного вала 3a коробки передач с помощью шпоночного соединения 14. С помощью этого соединения, водило 12 планетарной шестерни и входной вал 3а коробки передач могут вращаться как единое целое со второй скоростью n2 вращения. Кольцевое зубчатое колесо 11 содержит внешнюю периферийную поверхность, на которую крепится ротор 9b. Ротор 9b и кольцевое зубчатое колесо 11 образуют вращающийся узел, выполненный с возможностью вращения с третьей скоростью n3 вращения.
Поскольку промежуточная часть 6 между двигателем 2 внутреннего сгорания и коробкой 3 передач в транспортном средстве ограничена, требуется, чтобы электрическая машина 9 и планетарная передача составляли компактный узел. Компоненты 10 - 12 планетарной передачи в данном случае расположены, по существу, радиально внутри статора 9a электрической машины. Ротор 9b электрической машины, кольцевое зубчатое колесо 11 планетарной передачи, выходной вал 2a двигателя внутреннего сгорания и входной вал 3а коробки передач в данном случае расположены с возможностью вращения вокруг общей оси 7 вращения. За счет такой конструкции, электрическая машина 9 и планетарная передача занимают сравнительно небольшое пространство.
Транспортное средство содержит блокирующий механизм, который выполнен с возможностью перемещения между первым положением - открытым, в котором три компонента 10-12 планетарной передач могут вращаться с разными скоростями вращения, и вторым положением - блокировки, в котором он взаимно блокирует два из компонентов - 10, 12 - планетарной передачи таким образом, что три компонента 10-12 планетарной передачи вращаются с одной той же скоростью вращения. В этом варианте осуществления, блокирующий механизм содержит перемещаемый сочленяющий элемент 15. Сочленяющий элемент 15 закреплен на выходном валу 2а двигателя внутреннего сгорания с помощью шпоночного соединения 16. Сочленяющий элемент 15 в этом случае расположен, закреплен предотвращением проворачивания на выходном валу 2a двигателя внутреннего сгорания и выполнен перемещаемым в осевом направлении по выходному валу 2a двигателя внутреннего сгорания. Сочленяющий элемент 15 содержит сочленяющий участок 15а, выполненный с возможностью соединения с сочленяющим участком 12b водила 12 планетарной шестерни. Блокирующий механизм содержит схематически изображенный перемещающий элемент 17, выполненный с возможностью перемещения сочленяющего элемента 15 между первым свободным положением I1, в котором сочленяющие участки 15a, 12b не введены в зацепление друг с другом, и вторым блокировочным положением I2, в котором сочленяющие участки 15a, 12b введены в зацепление друг с другом. В первом положении размыкания, выходной вал 2a двигателя внутреннего сгорания и входной вал 3а коробки передач могут вращаться с разными скоростями вращения. Когда сочленяющие участки 15a, 12b находятся в зацеплении друг с другом, выходной вал 2 двигателя внутреннего сгорания и входной вал 3 коробки передач будут вращаться с одной и той же скоростью вращения.
Электрический блок 18 управления выполнен с возможностью управления перемещающим элементом 17. Блок 18 управления также выполнен с возможностью принятия решения о том, в каких случаях электрическая машина 9 должна работать как электродвигатель, а в каких - как генератор. Чтобы принять это решение, блок 18 управления может принимать актуальную информацию о подходящих рабочих параметрах. Блок 18 управления может быть компьютером с программным обеспечением, пригодным для этой цели. Конечно же, блок 18 управления может состоять из одного или нескольких отдельных блоков управления. Блок 18 управления также управляет схематически показанным регулирующим оборудованием 19, которое регулирует поток электрической энергии между гибридной аккумуляторной батареей 20 и статором 9a электрической машины. В рабочих ситуациях, в которых электрическая машина работает как электродвигатель, аккумулированная электрическая энергия подается от гибридной аккумуляторной батареи 20 к статору 9a. В рабочих ситуациях, в которых электрическая машина работает как генератор, электрическая энергия подается от статора 9a к гибридной аккумуляторной батарее 20. Гибридная аккумуляторная батарея 20 подает и аккумулирует электрическую энергию с напряжением порядка 200-800 вольт. Транспортное средство 1 оснащено функциональным блоком 26 управления электродвигателем, с помощью которого можно управлять скоростью n1 вращения двигателя 2 внутреннего сгорания. Блок 18 управления имеет возможность, например, активировать функциональный блок 26 управления электродвигателем при введении в зацепление и выведении из зацепления зубчатых колес в коробке 3 передач с целью создания состояния безмоментного состояния в коробке 3 передач.
Во время эксплуатации транспортного средства 1, водитель воплощает свой запрос на требуемый крутящий момент, нажимая схематически показанную педаль 21 акселератора. Блок 18 определяет момент T3, который должна подавать электрическая машина 9, и момент T1, который должен подавать двигатель 2 внутреннего сгорания, чтобы можно было привести транспортное средство в движение с требуемым моментом T. Блок 18 управления может управлять подходящим механизмом 19 управления, который подводит ток из гибридной аккумуляторной батареи 20 к электрической машине 9 с такой фазой и амплитудой, что электрическая машина 9 получает требуемый момент T3. Момент T3, который электрическая машина 9 подает для приведения транспортного средства 1 в движение, подается или принимается с высокой точностью. Блок управления 18 управляет схематически показанными впрыскивающими элементами 22 в двигателе 2 внутреннего сгорания, делая это таким образом, что горючее впрыскивается в количестве, которое соответствует потребному моменту T1. Вместе с тем, двигатель 2 внутреннего сгорания часто используют для эксплуатации разных узлов в транспортном средстве 1. Между прочим, именно по этой причине двигатель 2 внутреннего сгорания не всегда подает требуемый момент T1 с желаемой точностью. Другие такие причины связаны с компонентами двигателя внутреннего сгорания, которые подают горючее, а также с качеством и температурой топлива.
В планетарной передаче существует корреляционная зависимость между моментами солнечного зубчатого колеса 10, кольцевого зубчатого колеса 11 и водила 12 планетарной шестерни, причем эта корреляционная зависимость определяется количеством зубьев соответствующих компонентов 10-12. Поскольку каждый из таких агрегатов, как электрическая машина 9 и двигатель 2 внутреннего сгорания, соединен с одним компонентом 10, 12 планетарной передачи, можно вычислить T1c двигателя 2 внутреннего сгорания с учетом знания оценочного момента T3 электрической машины. Поскольку подаваемый момент T3 электрической машины 9 можно определить с высокой точностью, вычисляемый момент T1c двигателя 2 внутреннего сгорания с высокой точностью соответствует действительно подаваемому моменту двигателя внутреннего сгорания.
Момент T1c двигателя 2 внутреннего сгорания можно вычислить в соответствии с корреляционной зависимостью
i(-J3·dw3/dt+T3)=(-J1·dw1/dt+T1c),
где i - передаточное отношение между электрической машиной и двигателем внутреннего сгорания в планетарной передаче;
J3 - момент инерции электрической машины;
J1 - момент инерции двигателя внутреннего сгорания;
Tel - оценочный момент электрической машины;
T1c - вычисляемый момент двигателя внутреннего сгорания;
dwel/dt - производная угловой скорости электрической машины по времени, а
dw1/dt - производная угловой скорости двигателя внутреннего сгорания по времени.
J3 и J1 - известные величины, а dwel/dt и dw1/dt обозначают ускорения электродвигателя 9 и двигателя 2 внутреннего сгорания, соответственно, и их можно определить как разницу в скорости вращения для соответствующих компонентов на единицу времени между двумя моментами времени. Момент T1с двигателя 2 внутреннего сгорания можно вычислить, поскольку другие параметры в корреляционной зависимости известны.
Таким образом, T1 - это момент, который запрашивает блок 18 управления и который должен подавать двигатель 2 внутреннего сгорания для приведения транспортного средства 1 в движение. T1c представляет собой вычисляемую оценку реального момента, который двигатель внутреннего сгорания подает, когда приводит транспортное средство 1 в движение. Таким образом, вычисляемый момент T1c с высокой точностью соответствует реальному моменту. Вследствие этого, погрешность между требуемым моментом T1 двигателя внутреннего сгорания и реальным моментом можно оценить как расхождение между требуемым моментом T1 и вычисляемым моментом T1c.
Исходя из погрешностей в вышеупомянутой связи моментов, параметры модели коррекции можно оценить, например, следующим образом:
Tice*=ε1·Tice+ε0.
Параметры ε1 и ε0 оцениваются известными методами (например, рекурсивным методом наименьших квадратов (RLS)) и сохраняются для последующего использования при коррекции момента, получаемого от двигателя внутреннего сгорания. Повышенная точность коррекции выгодна, например, во время переключений передач под управлением электродвигателя.
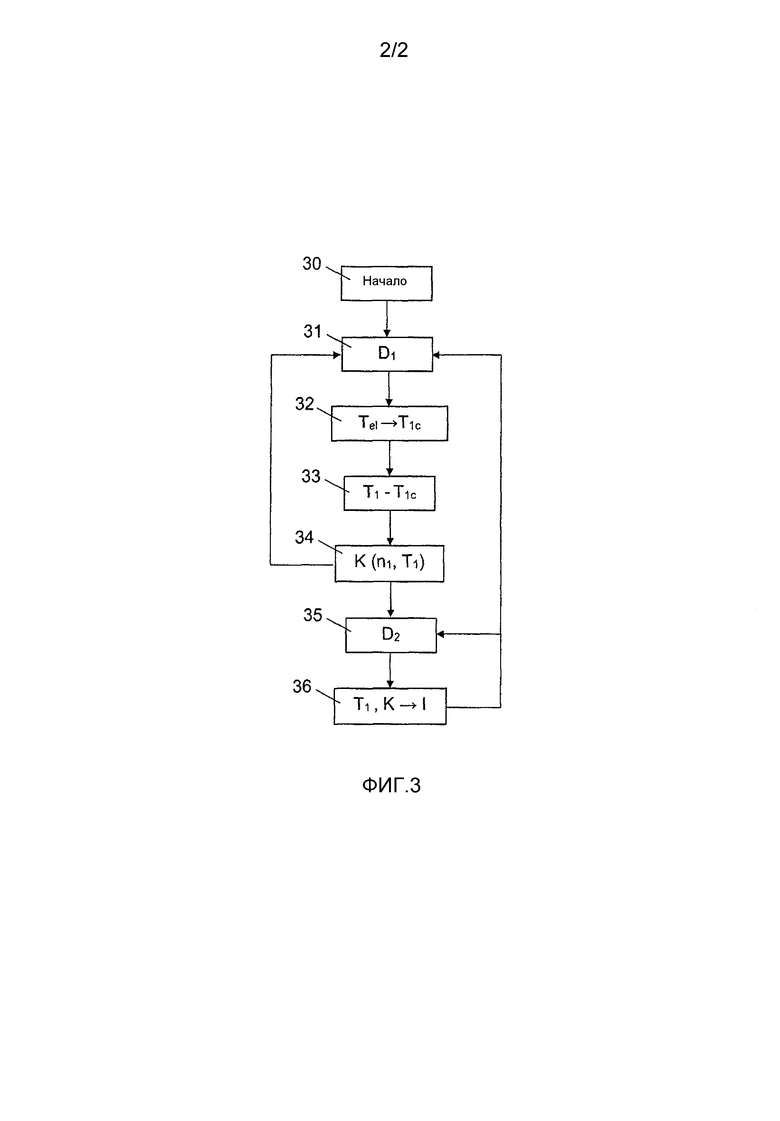
На фиг. 3 показана блок-схема последовательности операций, которая описывает способ приведения транспортного средства 1 в движение. Осуществление способа начинается на этапе 30. В первых рабочих ситуациях D1 транспортного средства, в которых сочленяющие участки 15a, 12b не введены в зацепление друг с другом, а планетарная передача находится в неблокированном положении, можно вычислить момент T1c, подаваемый двигателем внутреннего сгорания. Такая первая рабочая ситуация D1 возникает на этапе 31. Подходящие такие первые рабочие ситуации D1 имеют место, когда транспортное средство начинает двигаться при незадействованной планетарной передаче, при переключении передач в транспортном средстве и когда транспортное средство приводится в движение с малым положительным или отрицательным движущим моментом в то время, как двигатель внутреннего сгорания работает, имея скорость вращения холостого хода. На этапе 32, с помощью момента Tel электрической машины вычисляют подаваемый момент T1c двигателя внутреннего сгорания, по меньшей мере, при потребном моменте T1 и при скорости n1 вращения. Преимущественно вычисляют большое количество моментов T1c при значительном разбросе, касающемся потребного момента T1 и скорости n1 вращения двигателя 2 внутреннего сгорания.
На этапе 33 сравнивают требуемый момент T1 с вычисляемым моментом T1c. Между ними во многих случаях существует расхождение, поскольку двигатель 2 внутреннего сгорания не всегда подает требуемый момент T1 с высокой точностью. Поэтому информацию, касающуюся расхождения между требуемым моментом T1 и вычисляемым моментом T1c, с выгодой определяют при разных моментах T1 и скоростях n1 вращения двигателя 2 внутреннего сгорания. На этапе 34, строят модель коррекции и вычисляют коэффициент K коррекции, который определяет, как изменяется расхождение с изменением момента T1 и скорости n1 вращения двигателя внутреннего сгорания. Такой коэффициент K коррекции можно определить в соответствии с подходящим математическим методом, таким, как метод наименьших квадратов. В данном случае, осуществление способа можно начать снова на этапе 31, если возникает новая подходящая первая рабочая ситуация D1 транспортного средства, в которой это начало уместно для того, чтобы вычислить подаваемый момент T1c двигателя 2 внутреннего сгорания с целью дополнения или обновления модели коррекции и коэффициента K коррекции. В противном случае способ продолжается на этапе 35, когда возникает вторая рабочая ситуация D2, в которой двигатель 2 внутреннего сгорания должен подавать требуемый момент T1 с высокой точностью. Такая вторая рабочая ситуация D2 может случиться, когда нужно создать безмоментное состояние в коробке 3 передач для выключения какой-либо передачи. Другая такая вторая рабочая ситуация D2 может случиться, когда нужно создать безмоментное состояние между солнечным зубчатым колесом 10 и водилом 12 планетарной шестерни для расцепления сочленяющего элемента 15.
На этапе 36 с помощью потребного момента T1 и коэффициента K коррекции определяют количество I топлива, подлежащего впрыскиванию в двигатель 2 внутреннего сгорания, чтобы можно было получить требуемый момент T1 с высокой точностью. С помощью такой модели коррекции блок управления 18 может управлять впрыскивающим элементом 22 так, чтобы он впрыснул такое количество топлива, чтобы двигатель 2 внутреннего сгорания обеспечил требуемый момент T1 с высокой точностью. После этого способ продолжается на этапе 35 в следующей второй рабочей ситуации D2, которая возникает во время продолжающейся эксплуатации транспортного средства. В альтернативном варианте, способ продолжается на этапе 31, когда возникает новая первая рабочая ситуация D1, в которой уместно вычислить подаваемый момент T1c двигателя 2 внутреннего сгорания с целью дополнения или обновления модели коррекции и коэффициента K коррекции. Поскольку двигатель 2 внутреннего сгорания может эксплуатировать определенные узлы в транспортном средстве в прерывистом режиме или с изменяющейся мощностью, важно, чтобы коэффициент K коррекции обновлялся относительно часто. В вышеупомянутом способе коэффициент K коррекции используют только в тех рабочих ситуациях, когда двигатель 2 внутреннего сгорания должен обеспечивать требуемый момент T1 с высокой точностью. Вместе с тем, можно использовать коэффициент коррекции во всех рабочих ситуациях.
Изобретение никоим образом не ограничивается вариантом осуществления, описанным применительно к чертежам, а его можно без затруднений изменять в рамках объема притязаний формулы изобретения. Между ротором 9 и кольцевым зубчатым колесом 11 можно также расположить трансмиссию с некоторым передаточным отношением. Вследствие этого, вращение ротора 9 и кольцевого зубчатого колеса 11 с одной и той же скоростью вращения становится необязательным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОВРЕМЕННОГО УПРАВЛЕНИЯ КРУТЯЩИМ МОМЕНТОМ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И ЭЛЕКТРИЧЕСКОЙ МАШИНЫ В ГИБРИДНОМ ТРАНСПОРТНОМ СРЕДСТВЕ | 2013 |
|
RU2598653C2 |
| СПОСОБ ТРОГАНИЯ С МЕСТА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2604935C2 |
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В ГИБРИДНОМ ТРАНСПОРТНОМ СРЕДСТВЕ | 2013 |
|
RU2607907C2 |
| СИСТЕМА ПРИВОДА И СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2604758C2 |
| СПОСОБ УСКОРЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2605223C2 |
| СПОСОБ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2608987C2 |
| СИСТЕМА ПРИВОДА И СПОСОБ ЗАРЯДКИ АККУМУЛЯТОРНОЙ БАТАРЕИ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2607904C2 |
| СИСТЕМА ПРИВОДА И СПОСОБ ПРИВЕДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИЕ | 2013 |
|
RU2613144C2 |
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2598441C2 |
| СИСТЕМА ПРИВОДА И СПОСОБ ПРИВЕДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИЕ | 2013 |
|
RU2605141C2 |
Изобретение относится к системе привода транспортного средства. Система привода для транспортного средства содержит двигатель с выходным валом, коробку передач, электрическую машину со статором и ротором и планетарную передачу. Система также содержит блок управления, осуществляющий доступ к информации, касающейся момента электрической машины для приведения транспортного средства в движение на основе знания электрической энергии, подводимой к электрической машине и из нее, и вычисления момента двигателя для приведения транспортного средства в движение, когда существует связь между моментом электрической машины и моментом двигателя внутреннего сгорания, на основе знания момента электрической машины. Повышается точность определения момента двигателя. 3 н. и 22 з.п. ф-лы, 3 ил.
1. Система привода для транспортного средства (1), причем система привода содержит двигатель (2) внутреннего сгорания с выходным валом (2а), коробку (3) передач с входным валом (3а), электрическую машину (9), которая содержит статор (9а) и ротор (9b), и планетарную передачу, которая содержит солнечное зубчатое колесо (10), кольцевое зубчатое колесо (11) и водило (12) планетарной шестерни, причем выходной вал (2а) двигателя внутреннего сгорания соединен с первым из упомянутых компонентов планетарной передачи таким образом, что вращение этого вала (2а) приводит к вращению этого компонента, при этом входной вал (3а) коробки передач соединен со вторым из упомянутых компонентов планетарной передачи таким образом, что вращение этого вала приводит к вращению этого компонента, а ротор (9b) электрической машины соединен с третьим из упомянутых компонентов планетарной передачи таким образом, что вращение ротора (9b) приводит к вращению этого компонента, отличающаяся тем, что эта система привода содержит блок (18) управления, выполненный с возможностью осуществления доступа к информации, касающейся момента (Tel) электрической машины (9) для приведения транспортного средства (1) в движение на основе знания электрической энергии, подводимой к электрической машине и из нее, и вычисления момента (T1c) двигателя (2) внутреннего сгорания для приведения транспортного средства в движение по меньшей мере в первой рабочей ситуации (D1), когда существует известная связь между моментом (Tel) электрической машины (9) и моментом (T1c) двигателя внутреннего сгорания, на основе знания момента (Tel) электрической машины (9).
2. Система привода по п. 1, отличающаяся тем, что блок (18) управления выполнен с возможностью сравнения вычисляемого момента (T1c) двигателя внутреннего сгорания с требуемым моментом (T1) двигателя (2) внутреннего сгорания в упомянутой первой рабочей ситуации (D1).
3. Система привода по п. 2, отличающаяся тем, что блок (18) управления выполнен с возможностью сохранения информации, касающейся расхождения между вычисляемым моментом (T1c) двигателя внутреннего сгорания и требуемым моментом (T1) двигателя внутреннего сгорания в упомянутой первой рабочей ситуации (D1) и использования этой хранимой информации для управления двигателем (2) внутреннего сгорания во второй рабочей ситуации (D2).
4. Система привода по п. 3, отличающаяся тем, что блок (18) управления выполнен с возможностью сохранения информации, касающейся расхождения между вычисляемым моментом (T1c) двигателя внутреннего сгорания и требуемым моментом (T1) двигателя внутреннего сгорания в разных рабочих состояниях (T1, n1) двигателя (2) внутреннего сгорания.
5. Система привода по п. 3 или 4, отличающаяся тем, что блок (18) управления выполнен с возможностью дополнения и/или обновления упомянутой хранимой информации, касающейся расхождения между вычисляемым моментом (T1c) двигателя внутреннего сгорания и требуемым моментом (T1) двигателя внутреннего сгорания в течение последующих первых рабочих ситуаций (D1).
6. Система привода по п. 3 или 4, отличающаяся тем, что блок (18) управления выполнен с возможностью использования вычисляемого момента (T1c) двигателя внутреннего сгорания для управления двигателем (2) внутреннего сгорания во вторых рабочих ситуациях (D2), когда требуется, чтобы двигатель (2) внутреннего сгорания подавал требуемый момент (T1).
7. Система привода по п. 5, отличающаяся тем, что блок (18) управления выполнен с возможностью использования вычисляемого момента (T1c) двигателя внутреннего сгорания для управления двигателем (2) внутреннего сгорания во вторых рабочих ситуациях (D2), когда требуется, чтобы двигатель (2) внутреннего сгорания подавал требуемый момент (T1).
8. Система привода по п. 6, отличающаяся тем, что блок (18) управления выполнен с возможностью использования вычисляемого момента (T1c) двигателя внутреннего сгорания для управления двигателем (2) внутреннего сгорания во вторых рабочих ситуациях (D2), таких, в которых надо отключить передачу от коробки передач.
9. Система привода по п. 7, отличающаяся тем, что блок (18) управления выполнен с возможностью использования вычисляемого момента (T1c) двигателя внутреннего сгорания для управления двигателем (2) внутреннего сгорания во вторых рабочих ситуациях (D2), таких, в которых надо отключить передачу от коробки передач.
10. Система привода по любому из пп. 1-4, отличающаяся тем, что планетарная передача содержит сочленяющий элемент (15), с которым можно блокировать выходной вал (2а) двигателя внутреннего сгорания и входной вал (3а) коробки передач относительно друг друга, и тем, что блок (18) управления выполнен с возможностью определения вычисляемого момента (T1c) двигателя внутреннего сгорания в первых рабочих ситуациях (D1), когда сочленяющий элемент (15) находится в неблокированном положении, в котором упомянутые валы (2а, 3а) могут вращаться с разными скоростями (n1, n2) вращения.
11. Система привода по любому из пп. 1-4, отличающаяся тем, что блок (18) управления выполнен с возможностью определения вычисляемого момента (T1c) двигателя внутреннего сгорания с помощью корреляции, которая содержит передаточное отношение (i) между выходным валом (2а) двигателя внутреннего сгорания и электрической машиной (9) в планетарной передаче, момент инерции (J3) электрической машины, момент инерции (J1) двигателя внутреннего сгорания, ускорение электрической машины (9) и ускорение двигателя (2) внутреннего сгорания.
12. Система привода по любому из пп. 1-4, отличающаяся тем, что выходной вал (2а) двигателя внутреннего сгорания соединен с солнечным зубчатым колесом (10) планетарной передачи, тем, что входной вал (3а) коробки передач соединен с водилом (12) планетарной шестерни планетарной передачи и тем, что ротор (9b) электрической машины соединен с кольцевым зубчатым колесом (11) планетарной передачи.
13. Способ приведения в движение транспортного средства (1), причем транспортное средство содержит двигатель (2) внутреннего сгорания с выходным валом (2а), коробку (3) передач с входным валом (3а), электрическую машину (9), которая содержит статор (9а) и ротор (9b), и планетарную передачу, которая содержит солнечное зубчатое колесо (10), кольцевое зубчатое колесо (11) и водило (12) планетарной шестерни, причем выходной вал (2а) двигателя внутреннего сгорания соединен с первым из упомянутых компонентов планетарной передачи таким образом, что вращение этого вала (2а) приводит к вращению этого компонента, при этом входной вал (3а) коробки передач соединен со вторым из упомянутых компонентов планетарной передачи таким образом, что вращение этого вала приводит к вращению этого компонента, а ротор (9b) электрической машины соединен с третьим из упомянутых компонентов планетарной передачи таким образом, что вращение ротора (9b) приводит к вращению этого компонента, отличающийся этапами, на которых осуществляют доступ к информации, касающейся момента (Tel) электрической машины (9) для приведения транспортного средства (1) в движение на основе знания электрической энергии, подводимой к электрической машине и из нее, и вычисляют момент (T1c) двигателя (2) внутреннего сгорания для приведения транспортного средства в движение по меньшей мере в первой рабочей ситуации (D1), когда существует известная связь между моментом (Tel) электрической машины (9) и моментом (T1c) двигателя внутреннего сгорания, на основе знания момента (Tel) электрической машины (9).
14. Способ по п. 13, отличающийся этапом, на котором сравнивают вычисляемый момент (T1c) двигателя внутреннего сгорания с требуемым моментом (T1) двигателя (2) внутреннего сгорания в упомянутой первой рабочей ситуации (D1).
15. Способ по п. 14, отличающийся этапами, на которых сохраняют информацию, касающуюся расхождения между вычисляемым моментом (T1c) двигателя внутреннего сгорания и требуемым моментом (T1) двигателя внутреннего сгорания в упомянутой первой рабочей ситуации (D1) и используют эту хранимую информацию для управления двигателем (2) внутреннего сгорания во второй рабочей ситуации (D2).
16. Способ по п. 15, отличающийся этапами, на которых сохраняют информацию, касающуюся расхождения между вычисляемым моментом (T1c) двигателя внутреннего сгорания и требуемым моментом (T1) двигателя внутреннего сгорания в разных рабочих ситуациях (T1, n1) двигателя (2) внутреннего сгорания.
17. Способ по п. 15 или 16, отличающийся этапом, на котором дополняют и/или обновляют упомянутую хранимую информацию, касающуюся расхождения между вычисляемым моментом (T1c) двигателя внутреннего сгорания и требуемым моментом (T1) двигателя внутреннего сгорания в течение последующих первых рабочих ситуаций (D1).
18. Способ по п. 15 или 16, отличающийся этапом, на котором используют вычисляемый момент (T1c) двигателя внутреннего сгорания для управления двигателем (2) внутреннего сгорания во вторых рабочих ситуациях (D2), когда требуется, чтобы двигатель (2) внутреннего сгорания подавал требуемый момент (T1).
19. Способ по п. 17, отличающийся этапом, на котором используют вычисляемый момент (T1c) двигателя внутреннего сгорания для управления двигателем (2) внутреннего сгорания во вторых рабочих ситуациях (D2), когда требуется, чтобы двигатель (2) внутреннего сгорания подавал требуемый момент (T1).
20. Способ по п. 18, отличающийся этапом, на котором используют вычисляемый момент (T1c) двигателя внутреннего сгорания для управления двигателем (2) внутреннего сгорания во вторых рабочих ситуациях (D2), таких, в которых надо отключить передачу от коробки передач.
21. Способ по п. 19, отличающийся этапом, на котором используют вычисляемый момент (T1c) двигателя внутреннего сгорания для управления двигателем (2) внутреннего сгорания во вторых рабочих ситуациях (D2), таких, в которых надо отключить передачу от коробки передач.
22. Способ по любому из пп. 13-16, отличающийся этапами, на которых блокируют выходной вал (2а) двигателя внутреннего сгорания и входной вал (3а) коробки передач относительно друг друга, с помощью сочленяющего элемента (15), и определяют вычисляемый момент (T1c) двигателя внутреннего сгорания в первых рабочих ситуациях (D1), когда сочленяющий элемент (15) находится в неблокированном положении, в котором упомянутые валы (2а, 3а) могут вращаться с разными скоростями (n1, n2) вращения.
23. Способ по любому из пп. 13-16, отличающийся этапами, на которых определяют вычисляемый момент (T1c) двигателя внутреннего сгорания с помощью корреляции, которая содержит передаточное отношение (i) между выходным валом (2а) двигателя внутреннего сгорания и электрической машиной (9) в планетарной передаче, момент инерции (J3) электрической машины, момент инерции (J1) двигателя внутреннего сгорания, ускорение электрической машины (9) и ускорение двигателя (2) внутреннего сгорания.
24. Способ по любому из пп. 13-16, отличающийся этапами, на которых соединяют выходной вал (2а) двигателя внутреннего сгорания с солнечным зубчатым колесом (10) планетарной передачи, соединяют входной вал (3а) коробки передач с водилом (12) планетарной шестерни планетарной передачи и соединяют ротор (9b) электрической машины с кольцевым зубчатым колесом (11) планетарной передачи
25. Транспортное средство, содержащее систему привода по любому из пп. 1-12.
| EP 1316460 A1, 04.06.2003;JP 2010019136 A, 28.01.2010;US 2006022469 A1, 02.02.2006;US 2004249525 A1, 09.12.2004. |

