ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ И УРОВЕНЬ ТЕХНИКИ
Изобретение относится к системе привода, соответствующей преамбуле п. 1 формулы изобретения, и способу приведения транспортного средства в движение, соответствующему преамбуле п. 11 формулы изобретения.
Использование обычного механизма сцепления, который отсоединяет входной вал коробки передач от двигателя внутреннего сгорания во время процессов переключения передач в коробке передач, влечет за собой недостатки. Когда неподвижное транспортное средство начинает двигаться, диски механизма сцепления скользят друг по другу. Вследствие этого обеспечивается нагревание дисков. Это нагревание приводит к возрастающему расходу топлива и износу дисков сцепления. Обычный механизм сцепления также является относительно массивным и дорогостоящим. Он требует еще и относительно большого пространства в транспортном средстве. Использование гидравлического преобразователя момента также приводит к потерям.
Привод гибридных транспортных средств могут осуществлять первичный двигатель, который может быть двигателем внутреннего сгорания, и вторичный двигатель, который может быть электрической машиной. Электрическая машина снабжена, по меньшей мере, одним аккумулятором энергии, предназначенным для аккумулирования электрической энергии, и регулирующим оборудованием для регулирования потока электрической энергии между аккумулятором энергии и электрической машиной. Вследствие этого электрическая машина может попеременно работать как двигатель и генератор в зависимости от рабочего состояния транспортного средства. Когда тормозят транспортное средство, электрическая машина генерирует электрическую энергию, которую аккумулируют в аккумуляторе энергии. Аккумулированную электрическую энергию можно впоследствии использовать, например, для приведения транспортного средства в движение и эксплуатации различных вспомогательных систем в транспортном средстве.
В шведской патентной заявке SE 1051384-4, которая еще не опубликована, показана гибридная система привода с планетарной передачей, которая содержит три компонента, а именно солнечное зубчатое колесо, водило планетарной шестерни и кольцевое зубчатое колесо. Один из трех компонентов планетарной передачи соединен с выходным валом двигателя внутреннего сгорания, второй компонент планетарной передачи соединен с входным валом коробки передач, а третий компонент планетарной передачи соединен с ротором электрической машины. Электрическая машина соединена с аккумулятором энергии таким образом, что она попеременно может работать как двигатель и генератор. Скоростью вращения электрических машин можно управлять бесступенчато. Управляя скоростью вращения электрической машины, можно придавать входному валу коробки передач желаемую скорость вращения. При наличии гибридной системы, соответствующей SE 1051384-4, в цепочке привода транспортного средства не нужно использовать механизм сцепления.
При такой гибридной системе не нужно использовать механизм сцепления для приведения транспортного средства в движение. Вместе с тем, когда транспортное средство движется с низкой скоростью в течение длительного периода, например во время маневрирования, есть риск, что уровень заряда аккумулятора энергии станет очень низким или что аккумулятор энергии полностью разрядится.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Задача изобретения состоит в том, чтобы разработать систему привода для транспортного средства того типа, которая упомянута в начале и в которой уровень заряда в аккумуляторе энергии можно поддерживать даже тогда, когда транспортное средство движется с низкой скоростью в течение длительного периода.
Эта задача решается с помощью системы привода того типа, которая упомянута в начале описания и отличается признаками, приведенными в отличительной части п. 1 формулы изобретения. В соответствии с изобретением блок управления принимает информацию, касающуюся уровня заряда аккумулятора энергии, и определяет, ниже ли уровень заряда, чем предельный уровень, когда аккумулятор энергии нуждается в зарядке. Если уровень заряда ниже, чем предельный уровень, то увеличивают скорость вращения двигателя по отношению к той скорости вращения, когда аккумулятор энергии нуждается в зарядке. Скорость вращения двигателя внутреннего сгорания увеличивают до такого значения, что, по меньшей мере, предотвращается спадание уровня заряда аккумулятора энергии ниже наименьшего допустимого уровня. В альтернативном варианте скорость вращения двигателя внутреннего сгорания можно увеличить настолько, что уровень заряда аккумулятора энергии, по меньшей мере, более не снижается. В этом случае за эксплуатацию транспортного средства отвечает только двигатель внутреннего сгорания. Однако скорость вращения двигателя внутреннего сгорания можно с выгодой увеличить настолько, что можно будет эксплуатировать и транспортное средство, и электрическую машину, что приводит к возможности генерирования электрической энергии в аккумуляторе энергии. Когда уровень заряда аккумулятора энергии уже превысил предельный уровень, скорость вращения двигателя внутреннего сгорания можно опять уменьшить до обычного значения.
В соответствии с вариантом осуществления изобретения блок управления выполнен с возможностью приема информации об уровне заряда аккумулятора энергии, когда транспортное средство имеет скорость, меньшую, чем заранее определенная скорость, и определения того, ниже ли уровень заряда, чем упомянутый предельный уровень для нормальной эксплуатации транспортного средства. Во время процесса трогания транспортного средства с места электрическая машина сначала вращается с отрицательной скоростью вращения, так что аккумулятор энергии заряжается. После того, как транспортное средство начало катиться, транспортное средство довольно быстро приобретает скорость, на которой электрическая машина должна подавать электрическую энергию, чтобы обеспечить возможность дальнейшего увеличения скорости транспортного средства. Маневрирование большегрузных транспортных средств обычно означает, что транспортное средство проходит короткие расстояния с низкой скоростью между троганием с места и остановкой. При этом транспортное средство обычно непрерывно движется с включенной передачей для трогания с места, а двигатель внутреннего сгорания работает со скоростью вращения на холостом ходу. В данном случае за большую часть операции отвечает электрическая машина, что приводит к преобразованию электрической энергии и к тому, что между каждыми троганием и остановкой уровень заряда аккумулятора энергии спадает. Во время многих таких последовательных троганий и остановок или непрерывного маневрирования аккумулятор энергии рискует полностью разрядиться. Если блок управления принимает информацию, которая указывает, что уровень заряда аккумулятора энергии ниже предельного уровня, когда транспортное средство движется со скоростью ниже упомянутой заранее определенной скорости, блок управления увеличивает скорость вращения двигателя внутреннего сгорания до уровня, который выше, чем скорость вращения на холостом ходу. Скорость вращения двигателя внутреннего сгорания с выгодой увеличивают до такого значения, что он сам сможет отвечать за эксплуатацию транспортного средства. Тем самым предотвращается, по меньшей мере, спадание уровня заряда аккумулятора энергии ниже наименьшего допустимого уровня заряда. Скорость вращения двигателя внутреннего сгорания с выгодой увеличивается до такого значения, что во время эксплуатации транспортного средства также происходит зарядка аккумулятора энергии.
В соответствии с вариантом осуществления изобретения блок управления выполнен с возможностью управления скоростью вращения двигателя внутреннего сгорания, когда уровень заряда ниже, чем упомянутый предельный уровень, таким образом, что ротор электрической машины приобретает направление вращения, при котором происходит зарядка аккумулятора энергии. При трогании транспортного средства с места ротор электрической машины сначала вращается с отрицательной скоростью вращения, так что в аккумулятор энергии подается электрическая энергия. Когда транспортное средство начинает катиться, входной вал коробки передач приобретает последовательно увеличивающуюся скорость вращения, что снижает отрицательную скорость вращения ротора электрической машины, когда скорость вращения двигателя внутреннего сгорания поддерживается постоянной. Увеличивая скорость вращения двигателя внутреннего сгорания одновременно с приобретением увеличивающейся скорости транспортным средством, можно продлить время, в течение которого ротор электрической машины вращается в отрицательном направлении. Вследствие этого аккумулятор энергии можно заряжать в течение относительно продолжительного периода времени после трогания транспортного средства с места.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения блок управления выполнен с возможностью в ситуациях, когда уровень заряда аккумулятора энергии ниже, чем упомянутый предельный уровень, классифицировать низкий уровень заряда аккумулятора энергии и увеличивать скорость вращения двигателя внутреннего сгорания в зависимости от этой классификации. Такую классификацию можно выразить, например, в виде разности/отношения либо аналогичного параметра связи между уровнем заряда аккумулятора энергии и предельным уровнем. В альтернативном варианте классификацию можно проводить в несколько этапов классификации, предусматривая, например, низкий и очень низкий уровень заряда. В этом случае в ситуациях, когда уровень заряда аккумулятора энергии является очень низким, предусматривается большее увеличение скорости вращения двигателя внутреннего сгорания, чем когда уровень заряда аккумулятора энергии является просто низким.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения блок управления выполнен с возможностью управления скоростью вращения двигателя внутреннего сгорания, когда уровень заряда ниже, чем предельный уровень, таким образом, что она является скоростью вращения, увеличенной по отношению к скорости вращения входного вала коробки передач. Для водителя транспортного средства важно почувствовать, что эксплуатация транспортного средства происходит в соответствии с движениями педали акселератора. В этом случае двигатель внутреннего сгорания приобретает увеличивающуюся скорость вращения, когда увеличивается скорость транспортного средства. Отличие по сравнению с работой на обычном транспортном средстве заключается, по существу, лишь в том, что водитель приобретает такой опыт при езде на передаче, которая ниже, чем передача, включенная в коробке передач. Блок управления можно выполнить с возможностью управления двигателем внутреннего сгорания с увеличенной скоростью вращения, которая через некоторый коэффициент связана со скоростью вращения входного вала коробки передач. Величина упомянутого коэффициента зависит от уровня заряда аккумулятора энергии. При очень низком уровне заряда в аккумуляторе энергии используют коэффициент, больший, чем в случае, если уровень заряда является просто низким. С увеличением уровня заряда можно скорректировать и упомянутый коэффициент.
В соответствии с альтернативным вариантом осуществления изобретения блок управления выполнен с возможностью управления скоростью вращения двигателя внутреннего сгорания, когда уровень заряда ниже, чем предельный уровень, таким образом, что она является увеличенной скоростью вращения, которая связана с требуемым движущим моментом транспортного средства. В этом случае скорость вращения двигателя внутреннего сгорания увеличивается одновременно с нажатием педали акселератора водителем. В течение обычного процесса трогания гибридного транспортного средства с места скорость вращения двигателя внутреннего сгорания сначала является, по существу, постоянной независимо от положения педали акселератора. Блок управления можно выполнить с возможностью управления двигателем внутреннего сгорания с увеличенной скоростью вращения, которая через некоторый коэффициент зависит от требуемого движущего момента транспортного средства. Величина упомянутого коэффициента в данном случае зависит от уровня заряда аккумулятора энергии. При очень низком уровне заряда в аккумуляторе энергии используют коэффициент, больший, чем в случае, если уровень заряда является просто низким. В данном случае тоже можно скорректировать упомянутый коэффициент, когда уровень заряда в аккумуляторе энергии изменяется.
В соответствии с дополнительным альтернативным вариантом осуществления изобретения блок управления выполнен с возможностью управления двигателем внутреннего сгорания с увеличенной скоростью вращения, которая зависит от совокупности скорости вращения входного вала коробки передач и требуемого движущего момента транспортного средства. В этом случае двигателем внутреннего сгорания управляют с увеличенной скоростью вращения, которая определяется совокупностью обеих альтернатив. В данном случае можно также с выгодой использовать коэффициент, который связан с уровнем заряда в аккумуляторе энергии.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения выходной вал двигателя внутреннего сгорания соединен с солнечным зубчатым колесом планетарной передачи, входной вал коробки передач соединен с водилом планетарной шестерни планетарной передачи, а ротор электрической машины соединен с кольцевым зубчатым колесом планетарной передачи. При такой компоновке входящим в нее компонентам можно придать компактную конструкцию. Солнечное зубчатое колесо и водило планетарной шестерни можно соединить с выходным валом двигателя внутреннего сгорания и входным валом коробки передач соответственно с помощью шпоночных соединений или аналогичных соединений. Тем самым гарантируется, что солнечное зубчатое колесо вращается с такой же самой скоростью вращения, как выходной вал двигателя внутреннего сгорания, и что водило планетарной шестерни вращается с такой же скоростью вращения, как входной вал коробки передач. Ротор электрической машины может быть закреплен на внешней периферийной поверхности кольцевого зубчатого колеса. Внутренняя периферийная поверхность кольцевого зубчатого колеса обычно снабжена зубьями. Внешняя периферийная поверхность кольцевого зубчатого колеса обычно является гладкой и очень хорошо подходит для придания опоры ротору электрической машины. Вследствие этого кольцевое зубчатое колесо и ротор электрической машины образуют вращающийся узел. В альтернативном варианте ротор электрической машины можно соединить с кольцевым зубчатым колесом посредством трансмиссии. Однако возможно и соединение выходного вала двигателя внутреннего сгорания, входного вала коробки передач и ротора электрической машины с любым из других компонентов планетарной передачи.
Упомянутая вначале задача решается также посредством способа по пп. 11-20 формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже будет приведено описание предпочтительных вариантов осуществления изобретения в качестве примеров со ссылками на прилагаемые чертежи, при этом:
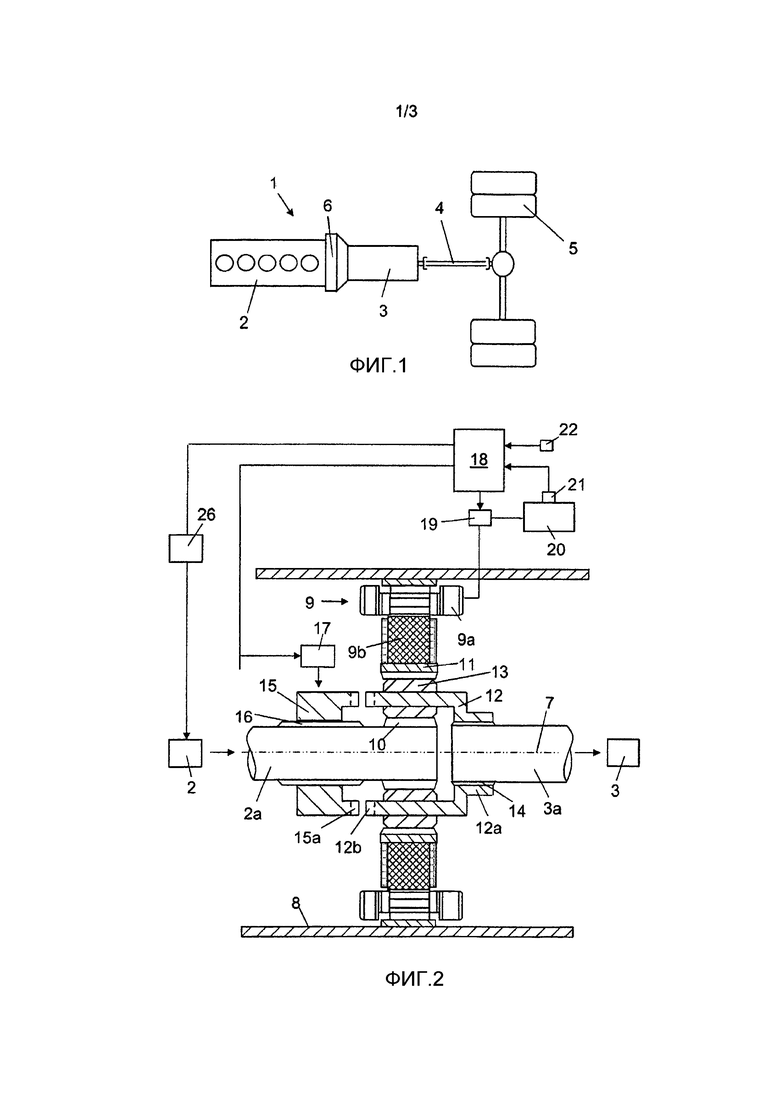
на фиг. 1 показана линия привода транспортного средства с системой привода в соответствии с изобретением;
на фиг. 2 показана система привода показана подробнее;
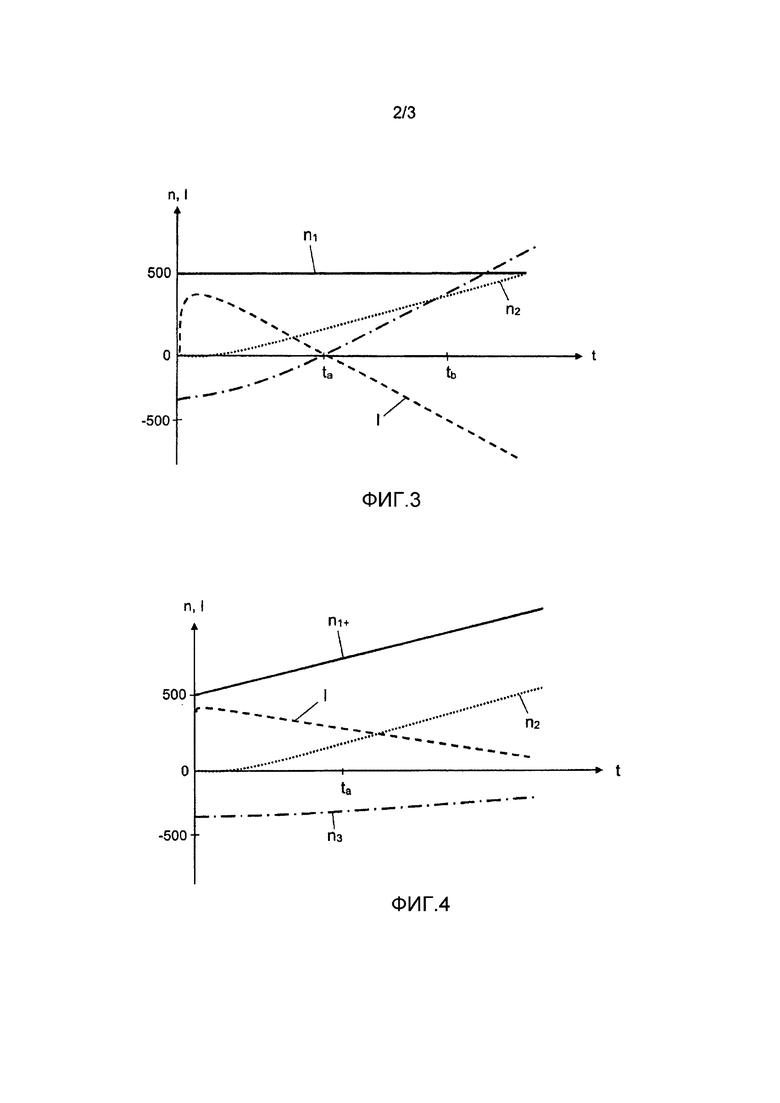
на фиг. 3 показано, как можно изменять разные параметры во время процесса трогания транспортного средства с места при обычной эксплуатации;
на фиг. 4 показано, как можно изменять разные параметры во время процесса трогания транспортного средства с места при эксплуатации, чтобы поддерживать заряд аккумулятора энергии; и
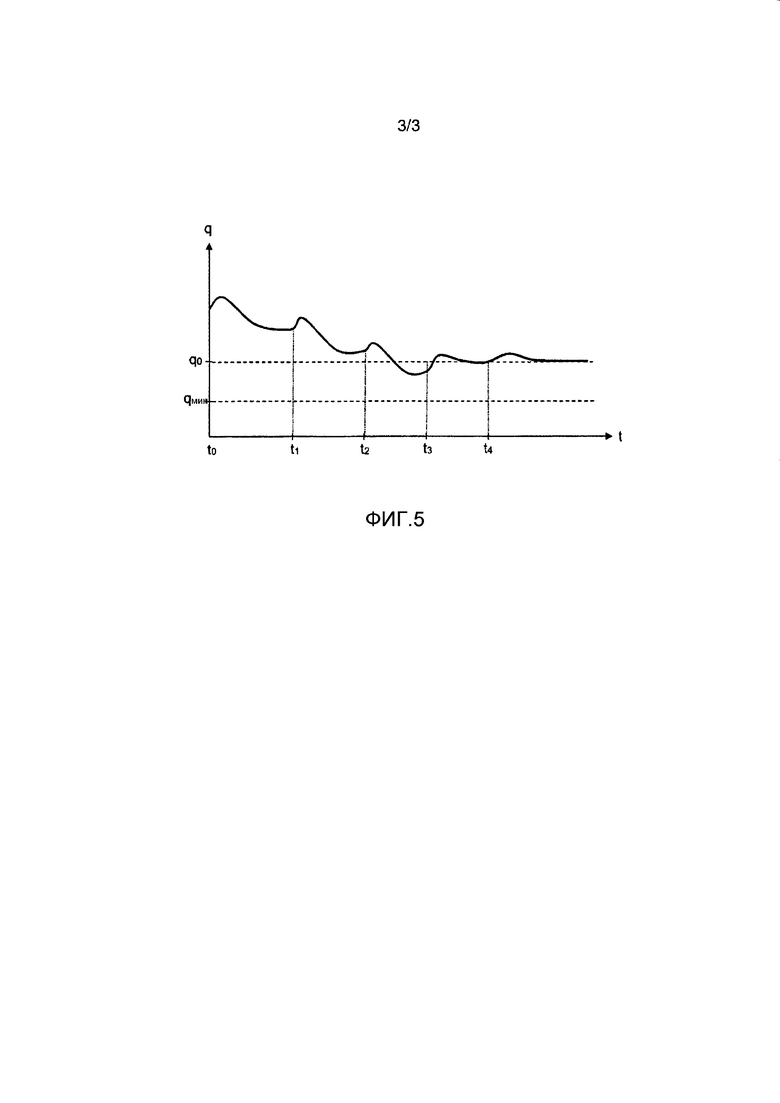
на фиг. 5 показано, как может изменяться уровень заряда аккумулятора энергии во время маневрирования.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На фиг. 1 показана линия привода для большегрузного транспортного средства 1. Линия привода содержит двигатель 2 внутреннего сгорания, коробку 3 передач, некоторое количество ведущих валов 4 и ведущих колес 5. Между двигателем 2 внутреннего сгорания и коробкой 3 передач линия привода содержит промежуточную часть 6. На фиг. 2 промежуточная часть 6 показана подробнее. В промежуточной части 6 предусмотрены двигатель 2 внутреннего сгорания с выходным валом 2a и коробка 3 передач с входным валом 3a. Выходной вал 2a двигателя внутреннего сгорания расположен соосно по отношению к входному валу 3a коробки передач. Выходной вал 2a двигателя внутреннего сгорания и входной вал 3a коробки передач расположены с возможностью вращения вокруг общей оси 7 вращения. Промежуточная часть 6 содержит кожух 8, окружающий электрическую машину 9 и планетарную передачу. Электрическая машина 9 содержит, как обычно, статор 9a и ротор 9b. Статор 9a содержит сердечник статора, закрепленный должным образом внутри кожуха 8. Сердечник статора содержит обмотки статора. Электрическая машина 9 выполнена с возможностью использования в определенных рабочих ситуациях аккумулированной электрической энергии для приложения движущей силы к входному валу 3а коробки передач и использования в других рабочих ситуациях кинетической энергии входного вала 3a коробки передач для генерирования и аккумулирования электрической энергии.
Планетарная передача расположена, по существу, радиально внутри статора 9a и ротора 9b электрической машины. Планетарная передача содержит, как обычно, солнечное зубчатое колесо 10, кольцевое зубчатое колесо 11 и водило 12 планетарной шестерни. Водило 12 планетарной шестерни несет некоторое количество зубчатых колес (сателлитов) 13, расположенных с возможностью вращения в радиальном пространстве между зубьями солнечного зубчатого колеса 10 и кольцевого зубчатого колеса 11. Солнечное зубчатое колесо 10 крепится на периферийной поверхности выходного вала 2a двигателя внутреннего сгорания. Солнечное зубчатое колесо 10 и выходной вал 2a двигателя внутреннего сгорания в данном случае вращаются как единое целое с первой скоростью n1 вращения. Водило 12 планетарной шестерни содержит крепежный участок 12a, который крепится на периферийной поверхности входного вала 3a коробки передач с помощью шпоночного соединения 14. С помощью этого соединения водило 12 планетарной шестерни и входной вал 3а коробки передач могут вращаться как единое целое со второй скоростью n2 вращения. Кольцевое зубчатое колесо 11 содержит внешнюю периферийную поверхность, на которую крепится ротор 9b. Ротор 9b и кольцевое зубчатое колесо 11 образуют вращающийся узел, выполненный с возможностью вращения с третьей скоростью n3 вращения.
Поскольку промежуточная часть 6 между двигателем 2 внутреннего сгорания и коробкой 3 передач в транспортном средстве ограничена, требуется, чтобы электрическая машина 9 и планетарная передача составляли компактный узел. Компоненты 10-12 планетарной передачи в данном случае расположены, по существу, радиально внутри статора 9a электрической машины. Ротор 9b электрической машины, кольцевое зубчатое колесо 11 планетарной передачи, выходной вал 2a двигателя внутреннего сгорания и входной вал 3а коробки передач в данном случае расположены с возможностью вращения вокруг общей оси 7 вращения. За счет такой конструкции электрическая машина 9 и планетарная передача занимают сравнительно небольшое пространство.
Транспортное средство содержит блокирующий механизм, который выполнен с возможностью перемещения между первым открытым положением, в котором три компонента 10-12 планетарной передач могут вращаться с разными скоростями вращения, и вторым блокированным положением, в котором он взаимно блокирует два из компонентов 10, 12 планетарной передачи таким образом, что три компонента 10-12 планетарной передачи вращаются с одной и той же скоростью вращения. В этом варианте осуществления блокирующий механизм содержит перемещаемый сочленяющий элемент 15. Сочленяющий элемент 15 закреплен на выходном валу 2а двигателя внутреннего сгорания с помощью шпоночного соединения 16. Сочленяющий элемент 15 в этом случае расположен закрепленным относительно вращения на выходном валу 2a двигателя внутреннего сгорания и выполнен перемещаемым в осевом направлении по выходному валу 2a двигателя внутреннего сгорания. Сочленяющий элемент 15 содержит сочленяющий участок 15а, выполненный с возможностью соединения с сочленяющим участком 12b водила 12 планетарной шестерни. Блокирующий механизм содержит схематически изображенный перемещающий элемент 17, выполненный с возможностью перемещения сочленяющего элемента 15 между первым свободным положением I1, в котором сочленяющие участки 15a, 12b не введены в зацепление друг с другом, и вторым блокированным положением I2, в котором сочленяющие участки 15a, 12b введены в зацепление друг с другом. В первом открытом положении выходной вал 2a двигателя внутреннего сгорания и входной вал 3а коробки передач могут вращаться с разными скоростями вращения. Когда сочленяющие участки 15a, 12b находятся в зацеплении друг с другом, выходной вал 2а двигателя внутреннего сгорания и входной вал 3а коробки передач будут вращаться с одной и той же скоростью вращения.
Электрический блок 18 управления выполнен с возможностью управления перемещающим элементом 17. Блок 18 управления также выполнен с возможностью принятия решения о том, в каких случаях электрическая машина 9 должна работать как двигатель, а в каких - как генератор. Чтобы принять это решение, блок 18 управления может принимать актуальную информацию о подходящих рабочих параметрах. Блок 18 управления может быть компьютером с программным обеспечением, пригодным для этой цели. Блок 18 управления также управляет схематически показанным регулирующим оборудованием 19, которое регулирует поток электрической энергии между аккумулятором 20 энергии и статором 9a электрической машины. В рабочих ситуациях, в которых электрическая машина работает как двигатель, аккумулированная электрическая энергия подается от аккумулятора 20 энергии к статору 9a. В рабочих ситуациях, в которых электрическая машина работает как генератор, электрическая энергия подается от статора 9a к аккумулятору 20 энергии. Аккумулятор 20 энергии подает и аккумулирует электрическую энергию с напряжением порядка 200-800 В. Блок 18 управления принимает от измерительного прибора 21 информацию, касающуюся уровня q заряда аккумулятора энергии. Блок 18 управления принимает информацию из датчика 22, который воспринимает положение педали акселератора. Положение педали акселератора соответствует движущему моменту, который водитель хочет подать на транспортное средство 1. Транспортное средство 1 оснащено функциональным блоком 26 управления двигателем, с помощью которого можно управлять скоростью n1 вращения двигателя внутреннего сгорания. Блок 18 управления имеет, например, возможность активировать функциональный блок 26 управления двигателем при введении в зацепление и выведении из зацепления зубчатых колес в коробке 3 передач, чтобы создать безмоментное состояние в коробке 3 передач.
На фиг. 3 показан процесс трогания транспортного средства с места, когда блок 18 управления уже принял из измерительного прибора 21 информацию, которая указывает, что уровень q заряда аккумуляторной батареи равен предельному уровню q0, который должен иметь аккумулятор 20 энергии во время трогания с места, чтобы транспортное средство 1 оказалось способным тронуться с места нормально, или выше этого уровня. Вследствие этого блок 18 управления осуществит нормальное трогание транспортного средства с места и будет управлять функциональным блоком 26 управления двигателем таким образом, что двигатель 2 внутреннего сгорания поддерживает свою скорость вращения холостого хода во время процесса трогания с места. На фиг. 3 в виде кривых показано, как скорость n1 вращения выходного вала двигателя внутреннего сгорания, скорость n2 вращения входного вала коробки передач, скорость n3 вращения электрической машины и ток I аккумулятора 20 энергии могут изменяться во время такого процесса нормального трогания транспортного средства 1 с места. Скорость вращения n1 вращения выходного вала двигателя внутреннего сгорания в данном случае показана сплошной линией, скорость n2 вращения входного вала коробки передач показана точечной линией, скорость n3 вращения электрической машины показана штрихпунктирной линией, а ток I аккумулятора 20 энергии показан пунктирной линией. Соотношение между количеством зубьев z1 солнечного зубчатого колеса 10 и количеством зубьев Z2 кольцевого зубчатого колеса 11 в этом примере составляет z1/z2=0,7.
В момент t=0 двигатель 2 внутреннего сгорания запущен и работает на скорости вращения холостого хода, которая в этом случае составляет 500 об/мин. Входной вал 3a коробки передач не вращается и поэтому имеет начальную скорость вращения n2=0 об/мин. Поскольку все компоненты в планетарной передаче соединены друг с другом при заранее определенном передаточном отношении, кольцевое зубчатое колесо 11 сначала приобретает скорость n3 вращения, которая определяется двумя другими скоростями n1, n2 вращения. При вышеупомянутом передаточном отношении z1/z2=0,7 кольцевое зубчатое колесо приобретает скорость вращения n3=-350 об/мин. Таким образом, кольцевое зубчатым колесом 11 сначала вращается в противоположном направлении по отношению к солнечному зубчатому колесу 10. Блок 18 управления управляет механизмом 19 управления таким образом, что электрическая машина 9 обеспечивает момент, который тормозит кольцевое зубчатое колесо 11. Тем самым генерируется электрическая энергия, и ток I сначала подается из электрической машины 9 в аккумулятор 20 энергии. Входной вал 3a коробки передач приобретает движущий момент, который определяется моментом двигателя внутреннего сгорания и тормозным моментом электрической машины. Этот момент будет воздействовать на входной вал 3a коробки передач таким образом, что он начинает вращаться, т.е. n2 становится больше нуля, и транспортное средство 1 трогается с места.
Блок 18 управления принимает информацию из датчика 22, связанного с положением педали акселератора, и управляет механизмом 19 управления таким образом, что электрическая машина и двигатель внутреннего сгорания подают на входной вал 3a коробки передач такой момент, что транспортное средство 1 приобретает движущий момент, указываемый положением педали акселератора. Блок 18 управления управляет функциональным блоком 26 управления двигателем таким образом, что скорость n1 вращения двигателя внутреннего сгорания поддерживается постоянной. Когда скорость n2 вращения входного вала коробки передач увеличивается, это приводит к тому, что отрицательная скорость n3 вращения электрической машины 9 снижается, если скорость n1 вращения двигателя внутреннего сгорания при этом поддерживается постоянной. В момент ta, скорость n2 вращения входного вала коробки передач увеличилась до такого значения, что отрицательная скорость n3 вращения электрической машины полностью исключена. Время ta может иметь величину порядка 0,5 с. Во время продолжающейся эксплуатации ротор 9b электрической машины вращается с положительной скоростью n3 вращения. Вследствие этого электрическая энергия из аккумуляторе 20 энергии будет расходоваться, и из аккумулятора 20 энергии в электрическую машину 9 будет поступать ток I. По истечении времени ta ток 1, который поступал из аккумулятора 20 энергии в электрическую машину 9, увеличивается с увеличением скорости n2 вращения входного вала коробки передач и скорости транспортного средства. В момент tb потреблен приблизительно такой же ток, как изначально генерировавшийся в аккумуляторе 20 энергии во время процесса трогания с места. Время tb может иметь величину порядка 1 с. Во время продолжающейся эксплуатации транспортного средства, при которой двигатель 2 внутреннего сгорания работает на скорости вращения холостого хода и включена передача для трогания с места, потребляется относительно большое количество электрической энергии. Если транспортное средство 1 в течение длительного периода работает в таких рабочих условиях, уровень заряда аккумулятора энергии существенно спадает. Это может происходить, например, во время маневрирования, когда транспортное средство 1 проходит короткие расстояния с низкой скоростью между троганием с места и остановкой. Если имеет место обычная эксплуатация, то есть риск, что аккумулятор 20 энергии полностью разрядится.
На фиг. 4 показан процесс трогания транспортного средства с места, когда блок 18 управления уже принял из измерительного прибора 21 информацию, которая касается положения педали акселератора и тем самым движущего момента, который водитель хочет приложить к транспортному средству 1. С помощью этой информации блок 18 управления также отмечает, насколько уровень q заряда аккумуляторной батареи ниже предельного уровня q0. Соответственно тому, что описано на фиг. 3, двигатель 2 внутреннего сгорания в момент t=0 имеет скорость вращения холостого хода, составляющую 500 об/мин, входной вал 3a коробки передач имеет скорость вращения n2=0 об/мин, а ротор 9b электрической машины имеет скорость вращения n3= -350 об/мин. Блок 18 управления в этом случае обеспечит альтернативную эксплуатацию транспортного средства 1, чтобы поддержать упомянутый уровень q заряда аккумулятора энергии.
Блок 18 управления принимает из датчика 22 информацию, касающуюся положения педали акселератора и тем самым движущего момента, который водитель хочет подать на транспортное средство 1. С помощью этой информации блок 18 управления управляет механизмом 19 управления и функциональным блоком 26 управления двигателем таким образом, что электрическая машина 9 и двигатель 2 внутреннего сгорания придают входному валу коробки передач момент, который соответствует желаемому движущему моменту транспортного средства 1. В этом случае блок 18 управления управляет функциональным блоком 26 управления двигателем таким образом, что двигатель 2 внутреннего сгорания приобретает увеличивающуюся скорость n1+ вращения, которая через некоторый коэффициент связана со скоростью n2 вращения входного вала коробки передач и скоростью транспортного средства при включенной передаче в коробке передач 3. Величина упомянутого коэффициента зависит от того, насколько низок уровень q заряда аккумулятора энергии по отношению к предельному уровню q0. Когда в аккумуляторе 20 энергии имеется уровень q заряда, который очевидно ниже предельного уровня q0, используют коэффициент, больший, чем в случае, если уровень q заряда ненамного ниже предельного уровня q0. Поскольку скорость n1 вращения двигателя внутреннего сгорания увеличивается с увеличением скорости n2 вращения входного вала коробки передач, отрицательную скорость вращения ротора 9b электрической машины можно поддерживать в течение периода времени, более длительного, чем время ta. Вследствие этого ток I подается в аккумулятор 20 энергии в течение более длительного периода времени, что приводит к повышению уровня q заряда в аккумуляторе 20 энергии. Водитель, что естественно, ощущает эту связь между скоростью n1 вращения двигателя внутреннего сгорания и увеличивающейся скоростью транспортного средства.
В альтернативном варианте блок 18 управления может управлять функциональным блоком 26 управления двигателем таким образом, что двигатель внутреннего сгорания приобретает увеличивающуюся скорость n1+ вращения, которая через некоторый коэффициент связана с потребным движущим моментом транспортного средства. Величина упомянутого коэффициента и в этом случае зависит от того, насколько низок уровень q заряда аккумулятора энергии по отношению к предельному уровню q0. Если водитель хочет вести транспортное средство с постоянным движущим моментом, то скорость n1 вращения двигателя внутреннего сгорания в этом случае тоже можно увеличивать соответственно тому, что показано на фиг. 4. В этом случае отрицательная скорость n3 вращения ротора 9b электрической машины также поддерживается в течение периода времени, более длительного, чем до момента ta. Таким образом, ток I подается из электрической машины 9 в аккумулятор 20 энергии в течение более длительного периода времени, что приводит к увеличению уровня q заряда аккумулятора 20 энергии. В этом случае при нажатии педали акселератора скорость вращения двигателя внутреннего сгорания увеличивается, что естественно ощущается водителем. Ощущение в этом случае будет таким же, как при трогании тяжело груженого обычного транспортного средства с места, когда скорость вращения увеличивается, если момент двигателя 2 внутреннего сгорания при его работе на холостом ходу недостаточен для трогания транспортного средства 1 с места.
В соответствии с дополнительной альтернативой блок 18 управления может управлять функциональным блоком 26 управления двигателем таким образом, что двигатель внутреннего сгорания приобретает увеличиваемую скорость n1+ вращения, которая связана и со скоростью n2 вращения входного вала коробки передач через некоторый коэффициент, и с потребным движущим моментом транспортного средства через некоторый коэффициент. Определение увеличиваемой скорости n1+ вращения двигателя внутреннего сгорания как произведения некоторого коэффициента и скорости n2 вращения входного вала коробки передач можно назвать первым способом. Определение увеличиваемой скорости n1+ вращения двигателя внутреннего сгорания как произведения некоторого коэффициента и требуемого движущего момента транспортного средства можно назвать вторым способом. В этом случае всякий раз, когда оба способа приводят к наибольшему значению увеличиваемой скорости n1+ вращения, можно, например, осуществлять управление ею во время преобладающих рабочих ситуаций. Также можно воспользоваться линейной комбинацией обоих способов, чтобы определить увеличиваемую скорость n1+ вращения двигателя внутреннего сгорания. Термин «линейная комбинация» означает, что увеличиваемую скорость n1+ вращения двигателя внутреннего сгорания определяют посредством взвешенной комбинации обоих способов. Например, увеличиваемую скорость n1+ вращения двигателя внутреннего сгорания можно определять на 40% одним из способов, а на 60% - другим способом. Соотношение между способами можно изменять при разных рабочих условиях.
На фиг. 5 показано, как может изменяться уровень q заряда аккумулятора энергии во время операции маневрирования гибридного транспортного средства 1. Уровень qмин заряда означает, что аккумулятор энергии почти полностью разряжен. Уровень qмин заряда следует поддерживать при любых обстоятельствах. В момент t=0 транспортное средство 1 трогается с места. В этом случае блок 18 управления принимает из измерительного прибора 21 информацию, которая указывает, что уровень q заряда аккумулятора 20 энергии очевидно превышает предельный уровень q0. Вследствие этого транспортное средство 1 можно трогать с места и эксплуатировать как обычно. Во время процесса эксплуатации уровень заряда аккумулятора 20 энергии сначала увеличивается, а потом спадет до более низкого уровня заряда в момент t1, когда водитель останавливает транспортное средство. Уровень q заряда аккумулятора 20 энергии изменяется, по существу, согласно кривой соответствующей формы, такой как кривая I тока на фиг. 3. В момент t1 транспортное средство 1 снова трогается с места. Блок 18 управления принимает из измерительного прибора 21 информацию, которая указывает, что уровень q заряда аккумулятора 20 энергии по-прежнему превышает предельный уровень q0. Вследствие этого транспортное средство 1 и в таком случае можно трогать с места и вести, как обычно. Впоследствии транспортное средство 1 снова останавливается и трогается с места, по существу, в момент t2, и повторяется процедура, соответствующая вышеизложенной. Можно отметить, что уровень q заряда аккумулятора энергии спадает впоследствии каждый раз при трогании и остановке транспортного средство во время нормальной эксплуатации, когда транспортное средство 1 едет с низкой скоростью и с включенной передачей для трогания с места, и если транспортное средство 1 нужно тронуть с места в момент t3, то уровень q заряда аккумулятора 20 энергии уже спал до уровня, более низкого, чем предельный уровень q0. Блок 18 управления оценивает, насколько уровень q заряда ниже, чем предельный уровень q0. Блок 18 управления управляет двигателя 2 внутреннего сгорания, обеспечивая увеличиваемую скорость вращения n1+, которая связана с умноженной на коэффициент (f) скоростью n2 вращения входного вала коробки передач или потребным движущим моментом транспортного средства. Таким образом, упомянутый коэффициент связан с тем, насколько уровень q заряда предельный уровень q0. В этом случае уровень заряда аккумулятора 20 энергии увеличивается соответственно тому, как это происходит при обычном трогании с места. В данном случае уровень q заряда аккумуляторной батареи изменяется, по существу, согласно кривой соответствующей формы, такой как кривая I тока на фиг. 4. Уровень q заряда аккумулятора энергии сначала увеличивается до уровня, который превышает предельный уровень q0, после чего падает до предельного уровня q0. Транспортное средство снова останавливается и трогается с места в момент t4. Блок 18 управления может корректировать упомянутый коэффициент во время эксплуатации, когда уровень q заряда аккумулятора 20 энергии изменяется по отношению к предельному уровню q0.
В момент t4 аккумулятор 20 энергии имеет уровень q заряда, который соответствует предельному уровню q0. Вследствие этого транспортное средство 1 имеет возможность тронуться с места как обычно. Уровень заряда сначала увеличивается, после чего спадает до предельного уровня q0. В этом случае спадание уровня заряда аккумулятора энергии ниже предельного уровня q0 предотвращается. Блок 18 управления в этом случае непрерывно принимает информацию из измерительного прибора 21. Когда блок 18 управления принимает информацию, которая указывает, что уровень q заряда аккумулятора энергии спал до предельного уровня q0, блок 18 управления увеличивает скорость n1 вращения двигателя внутреннего сгорания таким образом, что уровень q заряда аккумулятора энергии больше не спадает. Следовательно, блок 18 управления управляет скоростью вращения двигателя внутреннего сгорания таким образом, что уровень заряда не падает ниже предельного уровня q0. Как только транспортное средство достигает скорости v2, при которой можно перевести сочленяющий элемент в первое положение, аккумулятор энергии можно заряжать посредством двигателя 2 внутреннего сгорания, поскольку он в этом положении соединен с электрической машиной 9.
Изобретение никоим образом не ограничивается вариантом осуществления, описанным применительно к чертежам, а его можно без затруднений изменять в рамках объема притязаний формулы изобретения. Например, между ротором 9 и кольцевым зубчатым колесом 11 можно также расположить трансмиссию с некоторым передаточным отношением. Вследствие этого вращение ротора 9 и кольцевого зубчатого колеса 11 с одной и той же скоростью вращения становится необязательным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРИВОДА И СПОСОБ ПРИВЕДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИЕ | 2013 |
|
RU2605141C2 |
| СИСТЕМА ПРИВОДА И СПОСОБ ПРИВЕДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИЕ | 2013 |
|
RU2613144C2 |
| СИСТЕМА ПРИВОДА И СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2604758C2 |
| СПОСОБ ТРОГАНИЯ С МЕСТА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2604935C2 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА, СИСТЕМА ПРИВОДА И ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2615645C2 |
| СИЛОВАЯ ПЕРЕДАЧА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2557633C2 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ В ГИБРИДНОМ ТРАНСПОРТНОМ СРЕДСТВЕ | 2013 |
|
RU2605139C2 |
| СИСТЕМА ПРИВОДА ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА, ОСНАЩЕННАЯ СРЕДСТВОМ ВЫЧИСЛЕНИЯ КРУТЯЩЕГО МОМЕНТА ДВИГАТЕЛЯ НА ОСНОВАНИИ КРУТЯЩЕГО МОМЕНТА ЭЛЕКТРОДВИГАТЕЛЯ | 2013 |
|
RU2598705C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА В СВЯЗИ С ЗАПУСКОМ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ ЭТОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2600417C2 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА, СИСТЕМА ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2631358C2 |
Описаны система, привод и способ зарядки аккумуляторной батареи гибридного транспортного средства. Система привода для транспортного средства содержит двигатель внутреннего сгорания, функциональный блок управления двигателем, коробку передач, электрическую машину, аккумулятор энергии, который соединен с электрической машиной, и планетарную передачу. Планетарная передача содержит солнечное зубчатое колесо, кольцевое зубчатое колесо и водило планетарной шестерни. Выходной вал двигателя соединен с первым из упомянутых компонентов планетарной передачи. Входной вал коробки передач соединен со вторым из упомянутых компонентов планетарной передачи. Ротор электрической машины соединен с третьим из упомянутых компонентов планетарной передачи. Система привода содержит блок управления, который выполнен с возможностью приема информации, касающейся уровня заряда аккумулятора, определения того, ниже ли уровень заряда, чем предельный уровень, при котором аккумулятор энергии нуждается в зарядке, и если это так, то управления функциональным блоком управления. Двигатель приобретает увеличенную скорость вращения по отношению к скорости вращения, когда аккумулятор энергии не нуждается в зарядке. Достигается поддержание заряда аккумулятора во время длительного движения с низкой скоростью. 3 н. и 8 з.п. ф-лы, 5 ил.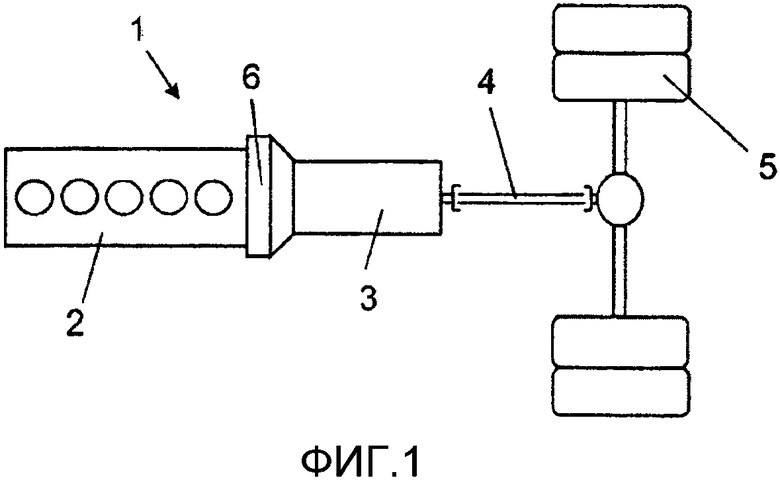
1. Система привода для транспортного средства (1), причем система привода содержит двигатель (2) внутреннего сгорания с выходным валом (2а), функциональный блок (26) управления двигателем, который позволяет управлять скоростью вращения двигателя внутреннего сгорания, коробку (3) передач с входным валом (3а), электрическую машину (9), которая содержит статор (9а) и ротор (9b), аккумулятор (20) энергии, который соединен с электрической машиной, и планетарную передачу, которая содержит солнечное зубчатое колесо (10), кольцевое зубчатое колесо (11) и водило (12) планетарной шестерни, при этом выходной вал (2а) двигателя внутреннего сгорания соединен с первым из упомянутых компонентов планетарной передачи таким образом, что вращение этого вала (2а) приводит к вращению этого компонента, при этом входной вал (3а) коробки передач соединен со вторым из упомянутых компонентов планетарной передачи таким образом, что вращение этого вала приводит к вращению этого компонента, а ротор (9b) электрической машины соединен с третьим из упомянутых компонентов планетарной передачи таким образом, что вращение ротора приводит к вращению этого компонента, отличающаяся тем, что эта система привода содержит блок (18) управления, который выполнен с возможностью приема информации, касающейся уровня (q) заряда аккумулятора (20) энергии, определения того, ниже ли уровень (q) заряда, чем предельный уровень (q0), при котором аккумулятор (20) энергии нуждается в зарядке, и если это так, то управления функциональным блоком (26) управления двигателем таким образом, что двигатель (2) внутреннего сгорания приобретает увеличенную скорость (n1+) вращения по отношению к скорости (n1) вращения, когда аккумулятор (20) энергии не нуждается в зарядке,
причем блок (18) управления выполнен с возможностью управлять двигателем (2) внутреннего сгорания с увеличенной скоростью (n1+) вращения, которая связана со скоростью (n2) вращения входного вала коробки передач и/или с требуемым движущим моментом транспортного средства (1) посредством коэффициента (f),
причем коэффициент (f) зависит от уровня (q) заряда аккумулятора (20) энергии,
причем чем ниже уровень (q) заряда, тем больше коэффициент (f).
2. Система привода по п. 1, отличающаяся тем, что блок (18) управления выполнен с возможностью приема информации об уровне (q) заряда аккумулятора (20) энергии, когда транспортное средство (1) имеет скорость, меньшую, чем заранее определенная скорость (v2), и определения того, ниже ли уровень (q) заряда, чем упомянутый предельный уровень (q0) для трогания транспортного средства с места во время нормальной эксплуатации.
3. Система привода по п. 1 или 2, отличающаяся тем, что блок (18) управления выполнен с возможностью управления скоростью (n1) вращения двигателя внутреннего сгорания, когда уровень (q) заряда ниже, чем упомянутый предельный уровень (q0), таким образом, что ротор (9b) электрической машины приобретает направление вращения, при котором она заряжает аккумулятор (20) энергии.
4. Система привода по п. 1 или 2, отличающаяся тем, что блок (18) управления выполнен с возможностью в ситуациях, когда уровень заряда аккумулятора (20) энергии ниже, чем упомянутый предельный уровень (q0), классифицировать низкий уровень заряда аккумулятора (20) энергии и увеличивать скорость вращения двигателя внутреннего сгорания в зависимости от этой классификации.
5. Система привода по п. 1 или 2, отличающаяся тем, что выходной вал (2а) двигателя внутреннего сгорания соединен с солнечным зубчатым колесом (10) планетарной передачи, что входной вал (3а) коробки передач соединен с водилом (12) планетарной шестерни планетарной передачи, и что ротор (9b) электрической машины соединен с кольцевым зубчатым колесом (11) планетарной передачи.
6. Способ приведения в движение транспортного средства (1), причем транспортное средство содержит двигатель (2) внутреннего сгорания с выходным валом (2а), функциональный блок управления двигателем, который позволяет управлять скоростью вращения двигателя внутреннего сгорания, коробку (3) передач с входным валом (3а), электрическую машину (9), которая содержит статор (9а) и ротор (9b), аккумулятор (20) энергии, который соединен с электрической машиной (9), и планетарную передачу, которая содержит солнечное зубчатое колесо (10), кольцевое зубчатое колесо (11) и водило (12) планетарной шестерни, при этом выходной вал (2а) двигателя внутреннего сгорания соединен с первым из упомянутых компонентов планетарной передачи таким образом, что вращение этого вала (2а) приводит к вращению этого компонента, при этом входной вал (3а) коробки передач соединен со вторым из упомянутых компонентов планетарной передачи таким образом, что вращение этого вала приводит к вращению этого компонента, а ротор (9b) электрической машины соединен с третьим из упомянутых компонентов планетарной передачи таким образом, что вращение ротора приводит к вращению этого компонента, отличающийся этапами, на которых принимают информацию, касающуюся уровня (q) заряда аккумулятора (20) энергии, определяют, ниже ли уровень (q) заряда, чем предельный уровень (q0), при котором аккумулятор (20) энергии нуждается в зарядке, и если это так, то управляют функциональным блоком (26) управления двигателем таким образом, что двигатель (2) внутреннего сгорания приобретает увеличенную скорость (n1+) вращения по отношению к скорости (n1) вращения, когда аккумулятор (20) энергии не нуждается в зарядке,
причем увеличенная скорость (n1+) вращения связана со скоростью (n2) вращения входного вала коробки передач и/или с требуемым движущим моментом транспортного средства (1) посредством коэффициента (f),
причем коэффициент (f) зависит от уровня (q) заряда аккумулятора (20) энергии,
причем чем ниже уровень (q) заряда, тем больше коэффициент (f).
7. Способ по п. 6, отличающийся этапами, на которых принимают информацию об уровне (q) заряда аккумулятора (20) энергии, когда транспортное средство (1) имеет скорость, меньшую, чем заранее определенная скорость (v2), и определяют, ниже ли уровень (q) заряда, чем упомянутый предельный уровень (q0).
8. Способ по п. 6 или 7, отличающийся этапом, на котором управляют скоростью (n1) вращения двигателя внутреннего сгорания, когда уровень (q) заряда ниже, чем упомянутый предельный уровень (q0), таким образом, что ротор (9b) электрической машины приобретает направление вращения, при котором она заряжает аккумулятор (20) энергии.
9. Способ по п. 6 или 7, отличающийся этапом, на котором ситуациях, когда уровень заряда аккумулятора (20) энергии ниже, чем упомянутый предельный уровень (q0), классифицируют низкий уровень заряда аккумулятора (20) энергии и придают двигателю внутреннего сгорания увеличиваемую скорость (n1+) вращения в зависимости от этой классификации.
10. Способ по п. 6 или 7, отличающийся этапами, на которых соединяют выходной вал (2а) двигателя внутреннего сгорания с солнечным зубчатым колесом (10) планетарной передачи, соединяют входной вал (3а) коробки передач с водилом (12) планетарной шестерни планетарной передачи и соединяют ротор (9b) электрической машины с кольцевым зубчатым колесом (11) планетарной передачи.
11. Транспортное средство, содержащее систему привода по любому из пп. 1-5.
| US 20050061564 A1, 24.03.2005 | |||
| US 20090288895 A1, 26.11.2009 | |||
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО, СПОСОБ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2007 |
|
RU2415038C1 |

