Изобретение относится к измерительной технике и может быть использовано для построения цифровых преобразователей однократных наносекундных временных интервалов (ВИ), заданных старт- и стоп-импульсами в системах импульсной радиолокации и радионавигации, включая комплексы ГЛОНАСС и GPS, медицинские радары и лидары, с нано- и пикосекундной дискретностью преобразования.
Известен [1] преобразователь (аналог), имеющий один рециркулятор, используемый для рециркуляции старт- и стоп-импульсов и образованный первой схемой ИЛИ, выход которой подключен через первую линию задержки к первому входу второй схемы ИЛИ и через вторую линию задержки ко второму входу второй схемы ИЛИ, выход которой соединен с первым входом первой схемы ИЛИ и через делитель импульсов со счетным входом счетчика импульсов, а шина вход преобразователя подключена ко второму входу первой схемы ИЛИ.
Недостатком данного преобразователя является низкое быстродействие преобразования, обусловленное тем, что период рециркуляций должен удовлетворять условию tn>2txmax (где 2txmax - наибольшее значение длительности преобразуемого ВИ).
Известен [2] преобразователь (прототип), содержащий два рециркулятора, один из которых служит для рециркуляции старт-импульса (рециркулятор старт-импульса), а второй - стоп-импульса (рециркулятор стоп-импульса), преобразуемого ВИ, причем каждый из рециркуляторов содержит схему ИЛИ, первый вход который соединен с входной шиной преобразователя, выход - с первым входом схемы И, выход который через линию задержки подключен ко второму входу схемы ИЛИ, а вторые входы схемы И обоих рециркуляторов объединены и соединены с выходом блока управления работой рециркуляторов, первый вход которого подключен к выходу схемы И рециркулятора старт-импульса, второй вход - к выходу схемы И рециркулятора стоп-импульса и к счетному входу счетчика импульсов, управляющий вход которого соединен с третьим входом блока управления работой рециркуляторов и с шиной управления преобразователя.
Недостатком данного преобразователя является также низкое быстродействие преобразования.
Целью предлагаемого изобретения является повышение быстродействия преобразования.
Поставленная цель достигается тем, что длительность старт-импульса в каждой из рециркуляций в рециркуляторе старт-импульса последовательно расширяется на калиброванную величину длительности, равной m×τ (τ - дискретность преобразования, a m=2,3,4,…, любое целое число) до тех пор, пока не произойдет их совпадение со стоп-импульсом, рециркулирующем в рециркуляторе стоп-импульса без изменения своей исходной длительности, при этом периоды рециркуляции старт- и стоп-импульсов должны быть строго равны между собой.
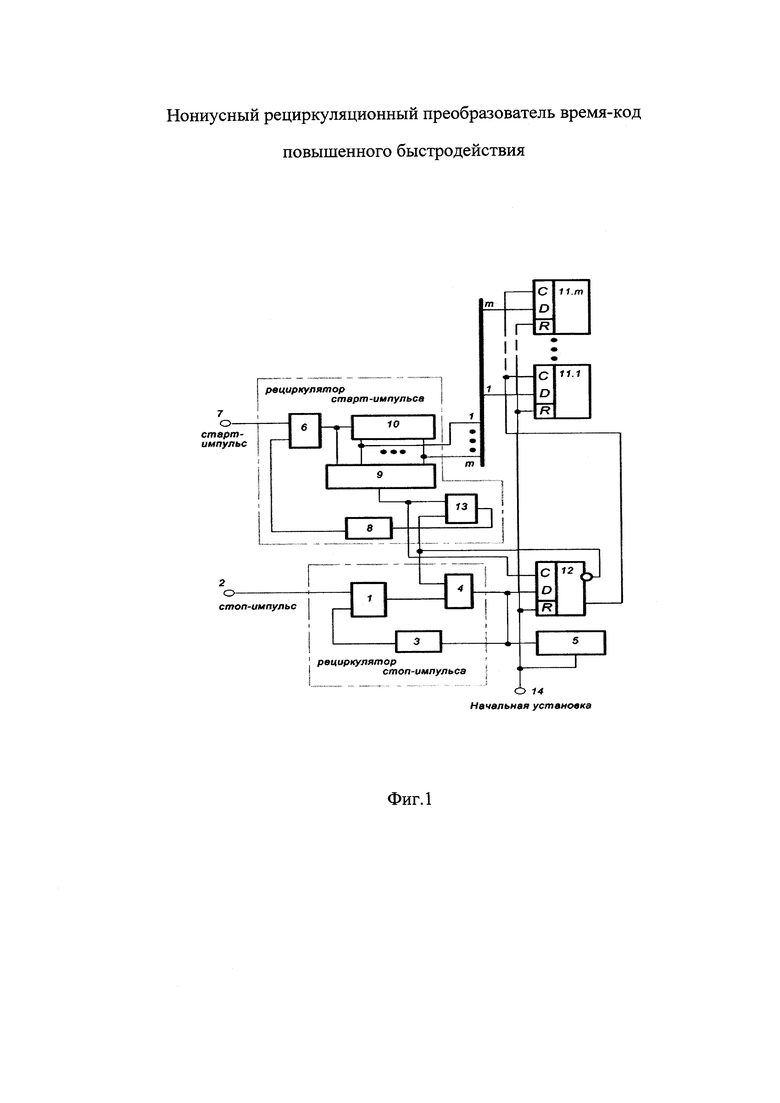
На фиг. 1 приводится функциональная схема нониусного рециркуляционного преобразователя время-код повышенного быстродействия, а на фиг. 2 - временные диаграммы его работы.
Нониусный рециркуляционный преобразователь время-код (ПВК) повышенного быстродействия содержит рециркулятор старт-импульса и рециркулятор стоп-импульса, выполненный на элементе ИЛИ1, первый вход которого соединен с шиной 2 «стоп-импульс» преобразователя, второй вход - с выходом линий задержки 3 стоп-импульса, а вход - с первым входом элемента И4, выход которого подключен к входу линий задержки 3 стоп-импульса и к счетному входу счетчика импульсов 5, рециркулятор старт-импульса содержит элемент ИЛИ6, первый вход которого соединен шиной 7 «старт-импульс» преобразователя, второй вход - с выходом линии задержки 8 старт-импульса, а выход - с первым входом (m+1)-входового элемента ИЛИ9 со входом m-отводной линий задержки 10, m-выходов которой подключены к D-входам соответствующих из m D-триггеров 11.1÷11.m и к соответствующим входам (m+1)-входового элемента ИЛИ9, выход которого подключен к С-входу дополнительного D-триггера 12 и к первому входу элемента И13, выход которого соединен со входом линии задержки 8 старт-импульса, а второй вход - со вторым входом элемента И4 рециркулятора стоп-импульса и с инверсным выходом дополнительного D-триггера 12, D-вход которого подключен к счетному входу счетчика импульсов 5 рециркулятора стоп-импульсов, а прямой выход - к С-входам m D-триггеров 11.1÷11.m, R-входы которых соединены с управляющим входом счетчика импульсов 5, с R-входом дополнительного D-триггера 12 и с шиной 14 «начальная установка» преобразователя.
Рассмотрим работу предлагаемого преобразователя. Перед началом преобразования сигналом управления, подаваемым на шину 14 преобразователя, D-триггер 12 открывает рециркулятор старт-импульса и рециркулятор стоп-импульса, а также осуществляет установку счетчика импульсов 5 и регистра памяти на D-триггерах 11.1÷11.m состояние логический ноль, то есть в исходное состояние.
Старт- и стоп-импульсы, соответствующие началу и концу преобразуемого ВИ длительностью tx, подаются на шины «старт-импульса» 7 и «стоп-импульса» 2 соответственно и должны иметь калиброванные значения длительности соответственно tст>(tp+τ) и tсп>(tp2+τ), где tp1=tp6+tp9+tp13, tp2=(t1+t4) - суммарное время задержки переключения логических элементов соответственно рециркулятора старт-импульса элемента ИЛИ6, (m+1)-входовый элемент ИЛИ9, элемент И13 и рециркулятора стоп-импульса (элемент ИЛИ1, элемент И4), а τ - время задержки между отводами m-отводной линии задержки 10, выбирается равной необходимой по техническому заданию дискретности преобразования. С момента прихода старт-импульса tст на шину 7 «старт-импульса» на выходе (m+1) входового элемента ИЛИ9 рециркулятора старт-импульса вырабатывается импульсная последовательность с периодом Тст и длительностью импульсов в каждой из рециркуляции tст=tст+imτ, где i=1,2,3,…,Nст - порядковый номер рециркуляции в рециркуляторе старт-импульса (Фиг. 2 д). Величина Тст задается временем задержки tлз8 линии задержки 8 старт-импульса как Тст=tлз8.
В то же время стоп-импульсы tсп рециркулирует в рециркуляторе стоп-импульса с периодом Тсп=tлз3, (tлз3 - время задержки линии задержки 3 рециркулятора стоп-импульса), но при этом его исходная длительность остается неизменной, то есть tспi=tсп (Фиг. 2 е).
Для обеспечения условия работоспособности преобразователя в диапазоне tx∈ [txmin; txmax] необходимо строгое выполнение условия Тст=Тсп>txmax (или tлз8=tлз3>txmax).
Так как в каждой из рециркуляций старт-импульс последовательно расширяется на величину m×τ, то имеется момент времени tcoв когда импульсы tстi и tсп совпадут (Фиг. 2 д, е). Момент времени (tcoв) совпадения регистрируется дополнительным D-триггером 12 (Фиг. 2 ж) и процесс рециркуляций в рециркуляторах старт- и стоп-импульсов прекращается, а в счетчике импульсов 5 будет зафиксировано число рециркуляции nсп стоп-импульса, которое соответствует грубой цифровой оценке временного интервала длительностью tx (Фиг. 2 е). Одновременно в регистре памяти, выполненным на D-триггерах 11.1÷11.m, в момент времени tсов осуществляется фиксация импульсных последовательностей, снимаемых с отводов m-отводной линии задержки 10 (Фиг. 2 б, в, г). Число отводов η (область изменения η∈[1÷m]), импульсные последовательности с которых не были зафиксированы в регистре памяти, будет представлять цифровое уточнение грубой цифровой оценки ВИ длительностью tx.
Таким образом, предлагаемый нониусный рециркуляционный преобразователь время-код в начале грубо, с дискретностью (m×τ), а затем точно, с дискретностью τ, осуществляет преобразование ВИ длительностью tx в цифровой код. При этом функция преобразования описывается выражением:
tx=nсп×mτ+ητ+tст.
Принимая tст=NO×τ, где NO - цифровое значение калиброванного значения длительности старт-импульса tст, которое определяется в процессе настройки преобразователя.
tx={nсп×m+NO+η}τ=N×τ.
Определение цифрового результата преобразования N осуществляется в арифметическом логическом устройстве, которое на Фиг. 1 условно не показано. Время преобразования предлагаемого преобразователя
Тпр≥txmax+nспТсп.
В то время как время преобразования преобразователя-прототипа имеет вид:
Тпрп≥txmax+m×nспТсп.
Так как txmax<Тсп, то Тпр≥nспТсп, а Тпрп≥m×nспТсп и, следовательно, предлагаемый преобразователь имеет в m раз меньше время преобразования.
По сравнению с прототипом предлагаемое техническое решение имеет в m раз более высокое быстродействие, то есть цель изобретения - повышение быстродействия преобразования - достигнута.
Источники информации
1. Авторское свидетельство СССР №654932, кл. G04F 10/00. Способ измерения временных интервалов / Н.Р. Карпов; заяв. 11.07.77. опубл. 30.03.79, Бюл. №12.
2. Малешко Е.А. Интегральные схемы в нониусной ядерной электронике. - Изд. 2-е, доп. М.: Атомиздат, 1987. - С. 146÷147, рис. 3.15.

Изобретение относится к измерительной технике и может быть использовано для построения цифровых преобразователей однократных наносекундных временных интервалов. Преобразователь имеет рециркулятор старт-импульса и рециркулятор стоп-импульса, выполненный на элементе ИЛИ, первый вход которого соединен с шиной «стоп-импульс» преобразователя, второй вход - с выходом линии задержки стоп-импульса, а выход - с первым входом элемента И, выход которого подключен к входу линии задержки стоп-импульса и к счетному входу счетчика импульсов, а рециркулятор старт-импульса содержит элемент ИЛИ, первый вход которого соединен с шиной «старт-импульс» преобразователя, второй вход - с выходом линии задержки старт-импульса, а выход - с первым входом (m+1)-входового элемента ИЛИ и со входом m-отводной линии задержки, m-выходов которой подключены к D-входам соответствующих из m D-триггеров и к соответствующим входам (m+1)-входовые элементы ИЛИ, выход которой подключен к С-входу дополнительного D-триггера и к первому входу элемента И, выход которого соединен со входом линии задержки старт-импульса, а второй вход - со вторым входом элемента И рециркулятора стоп-импульса и с инверсным выходом дополнительного D-триггера, D-вход которого подключен к счетному входу счетчика импульсов рециркулятора стоп-импульсов, а прямой выход - к С-входам m D-триггеров, R-входы которых соединены с управляющим входом счетчика импульсов рециркулятора стоп-импульса, с R-входом дополнительного D-триггера и с шиной «начальная установка» преобразователя. При этом линия задержки стоп-импульса рециркулятора стоп-импульса имеет время задержки, равное времени задержки линии задержки старт-импульса рециркулятора старт-импульса. Технический результат заключается в повышении быстродействия преобразования в m раз. 2 ил.
Нониусный рециркуляционный преобразователь время-код повышенного быстродействия, содержащий рециркулятор старт-импульса и рециркулятор стоп-импульса, выполненный на элементе ИЛИ, первый вход которого соединен с шиной «стоп-импульс» преобразователя, второй вход - с выходом линии задержки стоп-импульса, а выход - с первым входом элемента И, выход которого подключен к входу линии задержки стоп-импульса и к счетному входу счетчика импульсов, отличающийся тем, что с целью повышения быстродействия преобразования рециркулятор старт-импульса содержит элемент ИЛИ, первый вход которого соединен с шиной «Старт-импульс» преобразователя, второй вход - с выходом линии задержки старт-импульса, а выход - с первым входом (m+1)-входового элемента ИЛИ и со входом m-отводной линии задержки, m-выходов которой подключены к D-входам соответствующих из m D-триггеров и к соответствующим входам (m+1)-входового элемента ИЛИ, выход которого подключен к С-входу дополнительного D-триггера и к первому входу элемента И, выход которого соединен со входом линии задержки старт-импульса, а второй вход - со вторым входом элемента И рециркулятора стоп-импульсов и с инверсным выходом дополнительного D-триггера, D-вход которого подключен к счетному входу счетчика импульсов рециркулятора стоп-импульсов, а прямой выход - к С-входам m D-триггеров, R-входы которых соединены с управляющим входом счетчика импульсов рециркулятора стоп-импульса, с R-входом дополнительного D-триггера и с шиной «начальная установка» преобразователя, а линия задержки стоп-импульса рециркулятора стоп-импульса имеет время задержки, равное времени задержки линии задержки старт-импульса рециркулятора старт-импульса.
| Способ измерения временных интервалов | 1977 |
|
SU654932A1 |
| ПРЕОБРАЗОВАТЕЛЬ ВРЕМЯ-КОД РЕЦИРКУЛЯЦИОННОГО ТИПА | 2012 |
|
RU2483438C1 |
| Рециркуляционный измерительный преобразователь время-код | 1981 |
|
SU1018240A1 |
| Преобразователь время-код | 1983 |
|
SU1087954A1 |
| US 7423937 B2, 09.09.2008. | |||

