Изобретение относится к манипуляционному модулю для манипулирования автомобильными колесами в установке для обработки их поверхности.
Легкосплавные колеса транспортных средств, которые обычно называются легкосплавными дисками, в установках для обработки поверхности покрываются порошком или другим материалом покрытия. Затем покрытие запекается в печи. Для этого автомобильные колеса должны быть переданы от станции нанесения покрытия в печь. Автомобильные колеса из других металлов, прежде всего стальные колеса, также обрабатываются в ходе нескольких следующих друг за другом технологических шагов. В общем, автомобильные колеса независимо от своего материала должны передаваться от одной рабочей станции к другой рабочей станции.
Для этого применяются известные на рынке манипуляционные модули названного в начале типа, которые для этой цели закреплены на многоосной роботизированной руке, благодаря чему может происходить передача с максимально возможным количеством степеней свободы.
В известных манипуляционных приборах все захваченные ими автомобильные колеса удерживаются относительно манипуляционного прибора стационарно, последующее изменение положения автомобильных колес относительно, например, рамной структуры невозможно.
Однако каждое автомобильное колесо имеет конструктивные допуски, которые могут привести к тому, что конструктивная высота двух одновременно захваченных манипуляционным модулем автомобильных колес различна. Следствием этого может быть то, что передача от одной рабочей зоны к другой происходит не настолько точно, насколько это желательно. Если автомобильные колеса укладываются, например, на горизонтальную несущую структуру, то поверхности опоры автомобильных колес, которыми они укладываются на данную несущую структуру, в идеальном случае, должны лежать в общей горизонтальной плоскости.
Поэтому задачей изобретения является создание манипуляционного прибора названного в начале типа, которое соответствует данной идее.
Данная задача решена в манипуляционном модуле для манипулирования автомобильными колесами в установке для обработки их поверхности, содержащем по меньшей мере два удерживаемых рамной структурой зажимных узла, каждый из которых включает в себя несколько прижимных элементов, прижимаемых к одной или нескольким ответным поверхностям отдельного автомобильного колеса, причем по меньшей мере один из зажимных узлов включает в себя устройство поступательного движения, выполненное с возможностью перемещения прижимных элементов относительно рамной структуры с составляющей перемещения, параллельной оси вращения захваченного автомобильного колеса, а прижимные элементы зажимного узла удерживаются соответствующими прутковыми элементами и выполнены в виде прижимных тарелок, прижимаемых своей наружной кромкой к наружной поверхности автомобильного колеса.
Благодаря тому, что каждый из прижимных элементов зажимного узла удерживается прутковым (стержневым) элементом и выполнен в виде прижимной тарелки, прижимаемой своей внешней кромкой к внешней поверхности автомобильного колеса, посредством пруткового элемента с прижимной тарелкой образовано подобие поршневого узла, что позволяет регулировать положение прижимной тарелки с помощью средств гидравлического, электрического или пневматического привода. Это обеспечивает точность управления перемещением прижимных элементов.
При осуществлении изобретения, с одной стороны, относительное положение по меньшей мере одного автомобильного колеса вдоль его оси вращения и относительно другого автомобильного колеса может быть изменено, если оно уже захвачено манипуляционным модулем. С другой стороны, прижимные элементы до захвата автомобильного колеса могут быть приведены в позицию, которая сама по себе компенсирует конструктивные неравномерности как автомобильных колес, так и манипуляционного модуля, благодаря чему прижимные элементы, в значительной мере, прикасаются к одним и тем же местам прижима всех автомобильных колес. Кроме того, с помощью одного манипуляционного модуля также можно захватывать два или более автомобильных колес различного типа, так как могут быть скомпенсированы и конструктивные различия, которые не основаны на допусках.
При этом особо благоприятно, если прижимные элементы с помощью устройства поступательного движения являются перемещаемыми относительно рамной структуры коаксиально оси вращения захваченного автомобильного колеса. Параллельное смещение перемещенного автомобильного колеса за счет этого исключено. Параллельное смещение перемещенного автомобильного колеса нежелательно, прежде всего, тогда, когда автомобильные колеса в различных рабочих станциях укладываются на заданных расстояниях друг от друга.
Является предпочтительным, если несколько, предпочтительно все, зажимных узлов включают в себя по одному устройству последовательного движения. Таким образом, соответствующее аксиальное положение нескольких захваченных каждым из зажимных узлов автомобильных колес может быть изменено и согласовано друг с другом.
Предпочтительно, прижимные элементы первого зажимного узла выполнены с возможностью перемещения независимо от второго зажимного узла. Так можно индивидуально регулировать соответствующее аксиальное положение нескольких захваченных манипуляционным прибором автомобильных колес.
Является благоприятным, если зажимные узлы выполнены таким образом, что захваченные зажимными устройствами автомобильные колеса выровнены осепараллельно друг другу относительно их оси вращения. Расположенные в одной плоскости автомобильные колеса могут таким образом быстро и эффективно захватываться манипуляционным устройством.
Для надежной манипуляции с автомобильным колесом зажимной узел включает в себя по меньшей мере три прутковых элемента с прижимной тарелкой. Предпочтительно, предусмотрены четыре подобных узла.
Если положение прижимного элемента относительно рамной структуры является определяемым посредством по меньшей мере одного датчикового устройства, то компьютеризованный алгоритм движений манипуляционного прибора и захват, а также возврат автомобильного колеса могут быть адаптированы под каждое имеющееся или ожидаемое автомобильное колесо.
При этом особо благоприятно, если датчиковое устройство выполнено таким образом, что каждое положение прижимных элементов является определяемым. Тем самым можно определять не только одно или несколько важных положений прижимных элементов, но и, более того, все положения, которые могут принимать прижимные элементы.
Далее пример выполнения изобретения подробнее разъясняется на основании чертежей. На них показано:
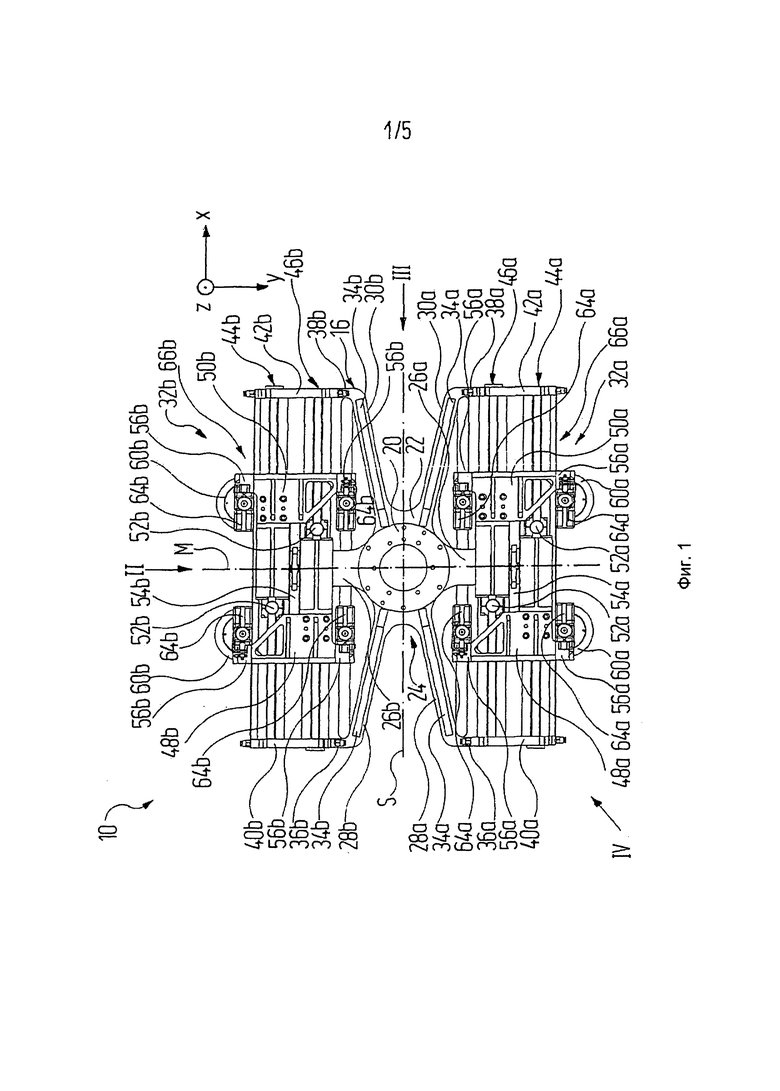
Фиг. 1 - вид сверху на манипуляционный модуль для манипулирования автомобильными колесами,
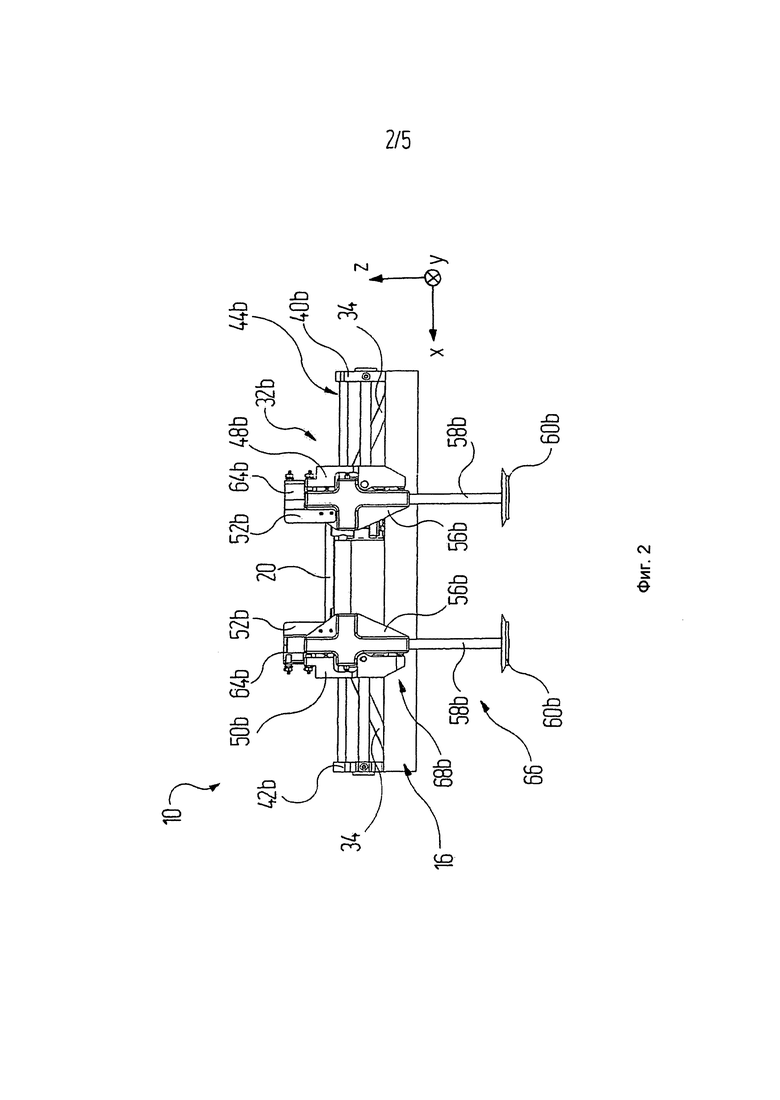
Фиг. 2 - вид сбоку на манипуляционный модуль согласно фиг. 1 при взгляде в направлении изображенной там стрелки II,
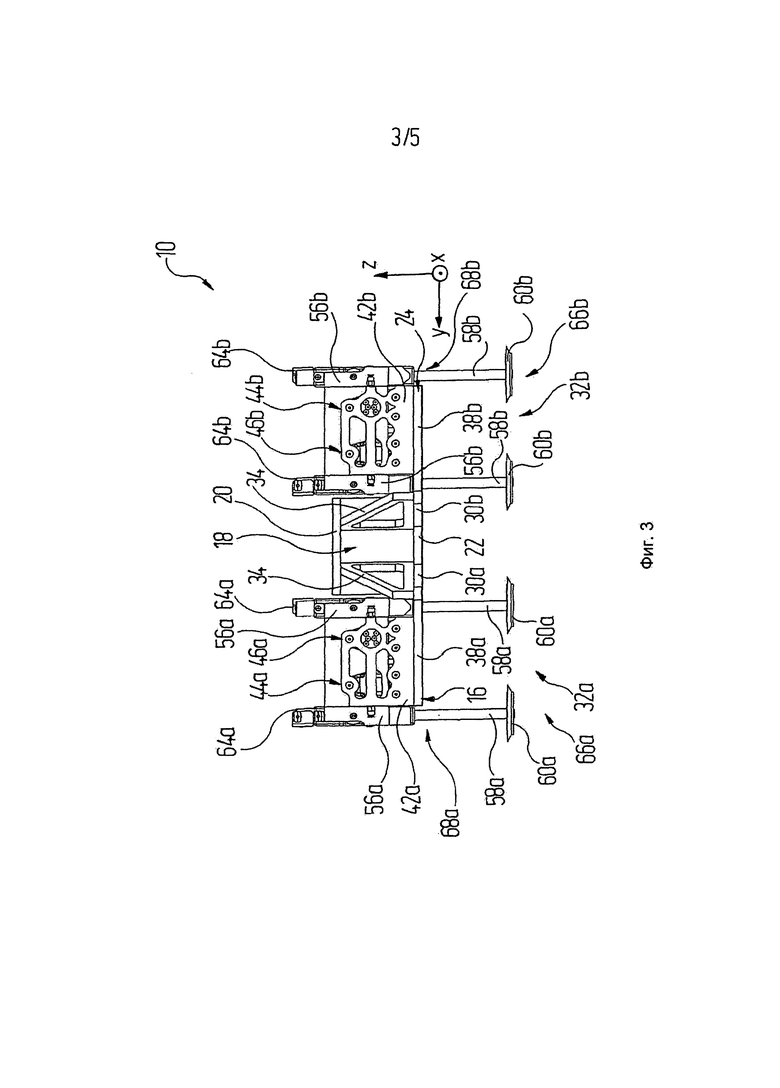
Фиг. 3 - вид сбоку на манипуляционный модуль согласно фиг. 1 при взгляде в направлении изображенной там стрелки III,
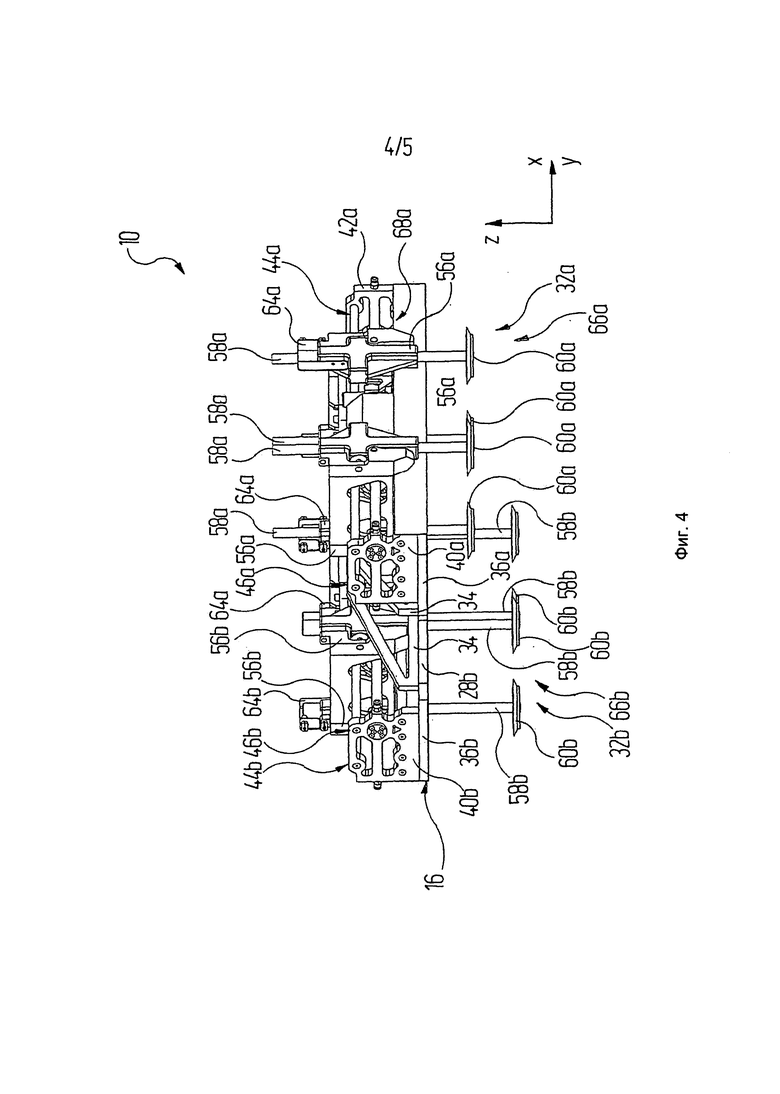
Фиг. 4 - вид сбоку на манипуляционный модуль согласно фиг. 1 при взгляде в направлении изображенной там стрелки V, причем четыре прижимных тарелки зажимного узла показаны в различных положениях по высоте,
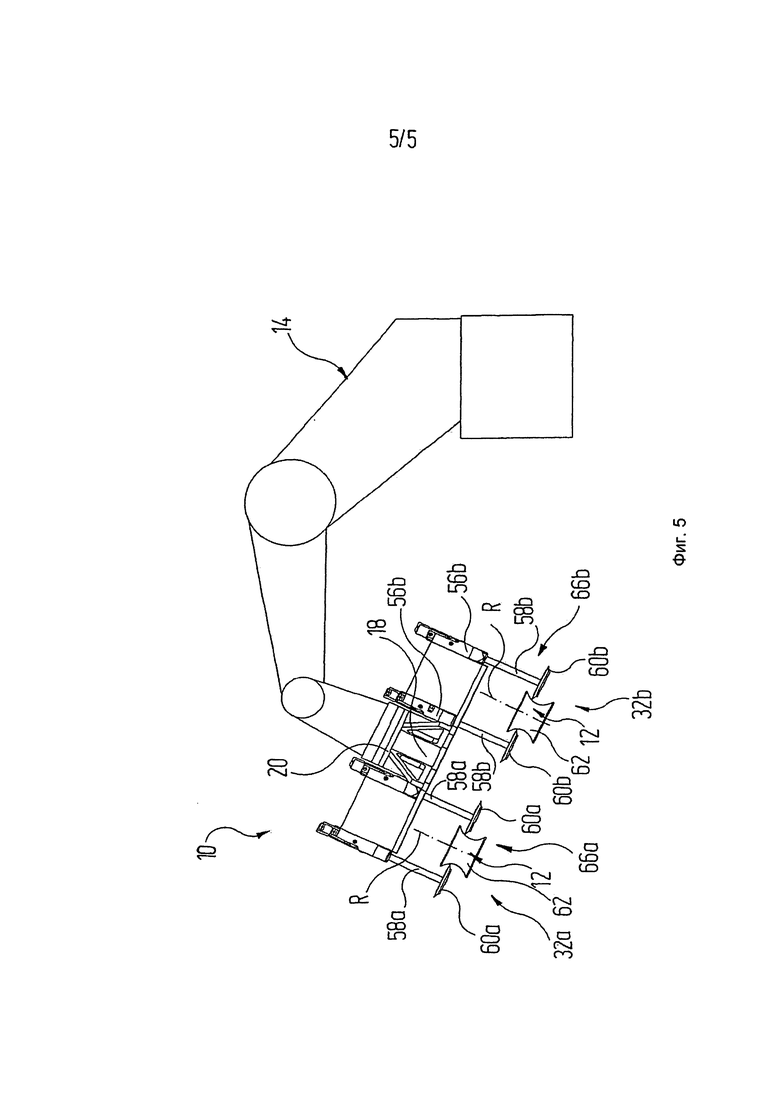
Фиг. 5 - схематично, многоосная роботизированная рука, которая удерживает манипуляционный модуль.
На фиг. 1 обозначением 10 обозначен весь манипуляционный модуль, с помощью которого манипулируют показанными лишь на фиг. 5 автомобильными колесами 12 в установке, в которой обрабатывается поверхность автомобильных колес 12. Там автомобильные колеса 12, прежде всего легкосплавные диски из алюминия, с помощью манипуляционного модуля 10 передаются, например, от станции нанесения покрытия в печь.
Для этого манипуляционный модуль 10 закреплен на многоосном манипуляционном роботе 14, который сам по себе известен и лишь схематично показан на фиг. 5, на которой для наглядности только манипуляционный модуль 10 снабжен ссылочным обозначением.
Показанная на фиг. 1-4 система координат неподвижно привязана к манипуляционному модулю 10, благодаря чему она перемещается вместе с ним в пространстве. При этом направление z указывает вверх, направление x - влево, и направление y - вперед. Соответствующие противоположные направления определяются как вниз, вправо и назад.
Манипуляционный модуль 10 включает в себя рамную структуру 16 с расположенным центрально опорным блоком 18. Он удерживает на своей верхней стороне крепежный фланец 20, посредством которого манипуляционный модуль 10 может быть соединен с роботом 14.
На противолежащей крепежному фланцу 20 нижней стороне опорный блок 18 своим основным участком 22 соединен со звездообразной крепежной пластиной 24, которая проходит параллельно крепежному фланцу 20 в xy-плоскости. От основного участка 22 две главных перемычки 26а, 26b выступают в направлении вперед и назад.
Главная перемычка 26а по обеим сторонам ограничена соответственно одной узкой перемычкой 28а и одной узкой перемычкой 30а, которые радиально отходят от основного участка 22 крепежной плиты 24. Соответственно главная перемычка 26b к левой и к правой стороне ограничена соответственно узкой перемычкой 28b и узкой перемычкой 30b.
Главная перемычка 26а с помощью узких перемычек 28а и 30а удерживает первый, здесь передний зажимной узел 32а, а главная перемычка 26b с помощью узких перемычек 28b и 30b - второй, здесь задний зажимной узел 32b.
Манипуляционный модуль 10 зеркально-симметричен относительно показанной только на фиг. 1 xz-плоскости, которая проходит через продольную ось опорного блока 18. Далее обратимся только к переднему зажимному узлу 32а. Сказанное относительно него в разумной степени действительно соответственно для заднего зажимного узла 32b, компоненты которого снабжены теми же ссылочными обозначениями со строчной буквой "b" вместо строчной буквы "а". Данные относительно переднего зажимного узла 32а направления вперед и назад, а также вправо и влево, соответственно реверсируются относительно заднего зажимного узла 32b.
Узкие перемычки 28а, 30а на своей верхней стороне удерживают по одной треугольной раме 34а, благодаря чему жесткость всей рамной структуры 16 усилена, чтобы противодействовать ее скручиванию при применении манипуляционного модуля 10.
На своих свободных концах узкие перемычки 28а, 30а переходят соответственно в боковые перемычки 36а и 38а, которые параллельно друг другу простираются в направлении y, то есть вперед, в xy-плоскости. На верхней стороне данные боковые перемычки 36а, 38а удерживают по одной боковой щечке 40а, 42а, которые расположены соответственно в одной yz-плоскости.
На боковые щечки 40а, 42а опираются по две направляющих конструкции, передняя направляющая конструкция 44а и задняя направляющая конструкция 46а, с тремя направляющими штангами, которые здесь не снабжены собственными ссылочными обозначениями и простираются перпендикулярно боковым щечкам 40а, 42а. При этом две нижние направляющие штанги одной направляющей конструкции 44а, 46а расположены в одной общей xy-плоскости, в то время как третья направляющая штанга расположена в находящейся над ней xy-плоскости. Обе соответствующие нижние направляющие штанги направляющей конструкции 44а, 46а к тому же проходят в одной и той же xy-плоскости.
По направляющим конструкциям 44а, 46а проходят салазки 48а и 50а, причем каждые салазки 48а, 50а передним опорным участком связаны с передней направляющей конструкцией 44а, и своим задним опорным участком связаны с задней направляющей конструкцией 46а. Салазки 48а, 50а несут с собой по одному электродвигателю 52а, посредством которого они могут быть перемещены моторным способом вдоль направляющих конструкций 44а, 46а.
При этом обе салазки 48а и 50а посредством зубчатой рейки 54а соединены друг с другом так, что всегда происходит одно движение обеих салазок 48а, 50а, и данное движение всегда происходит симметрично yz-плоскости "М", которая проходит через продольную ось опорного блока 18. Данная yz-плоскость также показана только на фиг. 1.
На своих противолежащих концах салазки 48а, 50а удерживают по одному опорному башмаку 56а. На каждый опорный башмак 56а в свою очередь опирается выступающая вниз штанга 58а, которая на своем нижнем конце коаксиально удерживает прижимную тарелку 60а так, что он проходит в xy-плоскости. Прижимные тарелки 60а в качестве прижимного элемента могут прижимать служащую в качестве сопряженной поверхности наружную поверхность 62 колеса (см. фиг. 5) автомобильного колеса 12.
Прижимные тарелки 60а в зависимости от цели применения манипуляционного модуля 10 и в зависимости от того, где на наружной поверхности 62 колеса автомобильного колеса 12 они производят захват, могут иметь различные выполнения. Так, например, они могут быть из пластика и относительно толстыми, если они производят захват полки обода. В отличие от этого, при контакте в области посадочной поверхности колеса они могут быть скорее плоскими. Если должно быть захвачено автомобильное колесо 12 со свежим покрытием, то прижимные тарелки 60а должны иметь острую наружную кромку, чтобы между ними и автомобильным колесом 12 была маленькая поверхность контакта.
В предложенном примере выполнения каждый зажимной узел 32а, 32b имеет четыре опорных башмака 56а со штангой 58а и прижимной тарелкой 60а. В принципе достаточно, если имеются только три таких конструкции на каждый зажимной узел 32а, 32b.
Каждая штанга 58а с прижимной тарелкой 60а установлена с возможностью смещения вверх и вниз от соответствующего опорного башмака 56а в не снабженном собственным ссылочным обозначением направляющем канале. К тому же каждый опорный башмак 56а ведет с собой собственный электродвигатель 64а, который соединен с соответствующей штангой 58а, чтобы ее можно было моторным способом смещать вверх или вниз.
Таким образом опорные башмаки 56а со штангами 58а с прижимными тарелками 60а и электродвигателями 64а образуют устройство поступательного движения 66а, с помощью которого захваченное зажимным узлом 32а автомобильное колесо 12 имеет возможность перемещения относительно рамной структуры 16 с вектором перемещения, который параллелен оси R вращения захваченного автомобильного колеса 12 (см. фиг. 5). Посредством этого аксиальное положение автомобильного колеса 12 относительно рамной структуры 16 может регулироваться. Конкретно захваченное манипуляционным модулем 10 автомобильное колесо 12 может быть перемещено коаксиально своей оси R вращения.
При этом ось R вращения захваченного зажимным узлом автомобильного колеса 12 проходит параллельно направлению z.
В предложенном примере выполнения обоим зажимным устройствам 32а, 32b назначено одно устройство 66а, 66b поступательного движения. При некоторых условиях может быть достаточным, если имеется только одно устройство 66а или 66b поступательного движения.
Помимо этого, рамная структура 16 удерживает два датчиковых устройства 68а и 68b, каждое из которых соотнесено с соответственно зажимным узлом 32а или же 32b. С их помощью можно определять положение прижимной тарелки 60а, 60b соответствующего зажимного узла 32а, 32b относительно рамной структуры 16 и, тем самым, относительно друг друга. К тому же можно применить сенсорную технику, так как она сама по себе известна из уровня техники. Например, можно было бы назвать магнитострикционные датчики.
Из-за того, что датчиковые устройства 68а, 68b расположены на удалении от прижимных тарелок 60а, 60b, и тем самым, от захваченных ими автомобильных колес 12 на рамной структуре 16, уменьшается опасность загрязнений датчиковых устройств 68а, 68b.
В общей сложности в манипуляционном модуле 10 все чувствительные к загрязнению компоненты, прежде всего опоры подвижных узлов, предусмотрены в противолежащей прижимным тарелкам 60а, 60b области рамной структуры 16.
С помощью манипуляционного модуля 10 одновременно захватываются соответственно два автомобильных колеса 12. Для этого салазки 48а, 50а и 48b, 50b с помощью соответствующих электродвигателей 52а, 52b по направляющим конструкциям 44а, 46а и 44b, 46b перемещаются друг от друга настолько далеко, чтобы прижимные тарелки 60а, 60b также удалялись друг от друга, пока соответственно четыре взаимодействующих прижимных тарелки 60а или же 60b не смогут захватить автомобильное колесо 12 между собой. При этом посредством датчиковых устройств 68а, 68b контролируется положение прижимных тарелок 60а, 60b, благодаря чему они могут быть приведены в позицию, в которой они с соблюдением минимального безопасного расстояния могут быть направлены над автомобильным колесом 12.
Посредством датчиковых устройств 68а, 68b пути перемещения прижимных тарелок 60а, 60b или же салазок 48а, 48b и 50а, 50b могут быть оптимизированы так, чтобы не производилось избыточных движений участвующих компонентов.
Прежде всего, можно согласовать скорость захватывающего движения прижимных тарелок 60а, 60b с тем, должно ли захватываться непокрытое или покрытое автомобильное колесо 12. Для непокрытого автомобильного колеса 12 выполняемое для этого движение прижимных тарелок 60а, 60b может быть выполнено существенно быстрее, чем в случае покрытого автомобильного колеса 12, для которого движение производится соответственно медленно, чтобы не повредить покрытие.
В случае, когда пустой манипуляционный модуль 10 должен захватить два автомобильных колеса 12 или захвачены два еще не обработанных автомобильных колеса, роботизированное движение манипуляционного модуля может производиться очень стремительно. Если, например, манипуляционным модулем 10 захвачены автомобильные колеса 12, которые снабжены свежим порошковым покрытием, то в отличие от этого, движение манипуляционного модуля 10 посредством робота 14 производится относительно медленно, благодаря чему воздействие на свежее покрытие не производится.
Манипуляционный модуль 10 взаимодействует с отдельно не показанным центральным управлением, от которого он получает данные о типе подлежащих захвату следующих автомобильных колес 12. Благодаря этому прижимные тарелки 60а, 60b уже заранее могут быть перемещены в подходящую позицию, благодаря чему время доступа к автомобильным колесам 12 может быть соответственно оптимизировано.
Затем манипуляционный модуль 10 посредством роботов 14 направляется над двумя соответствующим образом позиционированными автомобильными колесами 12, пока прижимные тарелки 60а, 60b не охватят внешние поверхности 62 соответствующего автомобильного колеса 12 в направлении периметра.
Затем пары салазок 48а, 50а и 48b, 50b снова перемещаются друг к другу, причем центровка автомобильных колес 12 относительно центральной плоскости М происходит автоматически благодаря зубчатым рейкам 54а, 54b.
В предложенном примере выполнения зажимные узлы 32а, 32b выполнены тем самым таким образом, что захваченные зажимными узлами 32а, 32b автомобильные колеса 12 выровнены осепараллельно друг другу относительно их осей R вращения.
Посредством устройств 66а и 66b поступательного движения захваченное зажимным узлом 32а или 32b автомобильное колесо 12 индивидуально и независимо от другого автомобильного колеса 12 может быть смещено в направлении своей оси R вращения. Таким образом допуски двух захваченных манипуляционным модулем 10 автомобильных колес 12 могут быть скомпенсированы, что приводит к тому, что автомобильные колеса 12 задают различные уровни укладки, на которых они должны быть переданы в следующую рабочую станцию.
В непоказанной здесь отдельно модификации несколько манипуляционных модулей 10 могут быть закреплены на своеобразных несущих вилах, которые, в свою очередь, могут быть связаны с роботом 14. Таким образом, робот 14 может одновременно направлять два, три, четыре или даже больше манипуляционных модуля 10, посредством чего можно манипулировать четырьмя, шестью, восемью или же соответствующим количеством автомобильных колес 12 одновременно. При этом все автомобильные колеса 12 точно также могут быть индивидуально перемещены в позицию вдоль соответствующей оси R вращения.
В общем, описанный выше манипуляционный модуль может быть выполнен по модульному принципу. Опорные башмаки 56а, 56b и все соответствующие компоненты соответственно конструктивно идентичны и, тем самым, могут быть заменены во всех местах как единое целое. Благодаря этому можно уменьшить затраты на поддержание в исправном состоянии и техническое обслуживание.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕКЛООЧИСТИТЕЛЬ, ПРЕЖДЕ ВСЕГО АВТОМОБИЛЬНЫЙ СТЕКЛООЧИСТИТЕЛЬ | 2012 |
|
RU2611671C2 |
| СТЕКЛООЧИСТИТЕЛЬ, ПРЕЖДЕ ВСЕГО АВТОМОБИЛЬНЫЙ СТЕКЛООЧИСТИТЕЛЬ | 2012 |
|
RU2633444C2 |
| СТЕКЛООЧИСТИТЕЛЬ, ПРЕЖДЕ ВСЕГО АВТОМОБИЛЬНЫЙ СТЕКЛООЧИСТИТЕЛЬ | 2012 |
|
RU2605649C2 |
| СТЕКЛООЧИСТИТЕЛЬ | 2012 |
|
RU2608984C2 |
| СТЕКЛООЧИСТИТЕЛЬ, ПРЕЖДЕ ВСЕГО АВТОМОБИЛЬНЫЙ СТЕКЛООЧИСТИТЕЛЬ | 2012 |
|
RU2618852C1 |
| СТЕКЛООЧИСТИТЕЛЬ | 2012 |
|
RU2620391C2 |
| СТЕКЛООЧИСТИТЕЛЬ | 2012 |
|
RU2606658C2 |
| СТЕКЛООЧИСТИТЕЛЬ, ПРЕЖДЕ ВСЕГО АВТОМОБИЛЬНЫЙ СТЕКЛООЧИСТИТЕЛЬ | 2012 |
|
RU2625703C1 |
| РУЧНАЯ МАШИНА | 2010 |
|
RU2555284C2 |
| СТЕКЛООЧИСТИТЕЛЬ | 2012 |
|
RU2635942C2 |
Изобретение относится к манипуляционному модулю для манипулирования автомобильными колесами в устройстве для обработки их поверхности. Манипуляционный модуль содержит по меньшей мере два удерживаемых рамной структурой (16) зажимных узла (32а, 32b), каждый из которых включает в себя прижимные элементы (60а, 60b), прижимаемые к одной или нескольким ответным поверхностям (62) отдельного автомобильного колеса (12). По меньшей мере один из зажимных узлов (32а, 32b) включает в себя устройство (66а, 66b) поступательного движения, выполненное с возможностью перемещения прижимных элементов (60а, 60b) относительно рамной структуры (16) с составляющей перемещения, параллельной оси (R) вращения захваченного автомобильного колеса (12). Прижимные элементы (60а, 60b) зажимного узла (32а, 32b) удерживаются соответствующими прутковыми элементами (58а, 58b) и выполнены в виде прижимных тарелок, прижимаемых своей наружной кромкой к наружной поверхности (62) автомобильного колеса (12). Изобретение обеспечивает точность управления перемещением прижимных элементов. 7 з.п. ф-лы, 5 ил. 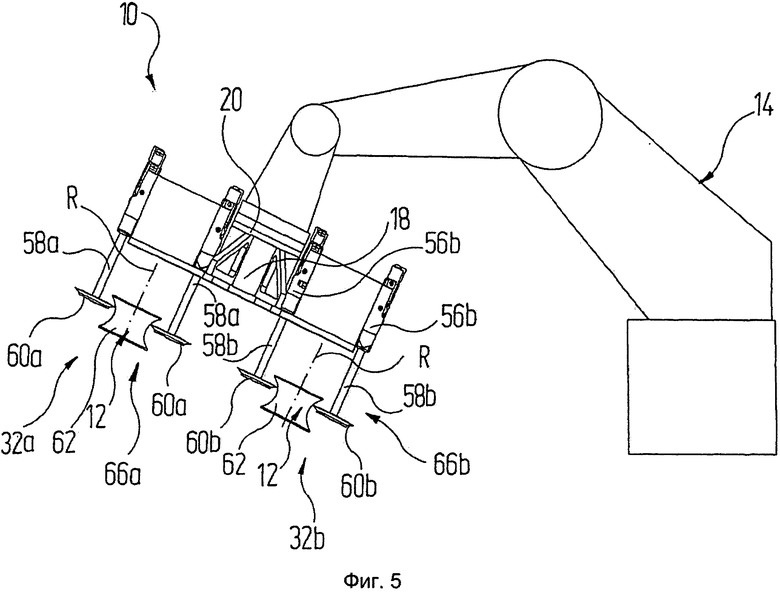
1. Манипуляционный модуль для манипулирования автомобильными колесами в установке для обработки их поверхности, содержащий по меньшей мере два удерживаемых рамной структурой (16) зажимных узла (32а, 32b), каждый из которых включает в себя несколько прижимных элементов (60а, 60b), прижимаемых к одной или нескольким ответным поверхностям (62) отдельного автомобильного колеса (12), причем по меньшей мере один из зажимных узлов (32а, 32b) включает в себя устройство (66а, 66b) поступательного движения, выполненное с возможностью перемещения прижимных элементов (60а, 60b) относительно рамной структуры (16) с составляющей перемещения, параллельной оси (R) вращения захваченного автомобильного колеса (12), отличающийся тем, что прижимные элементы (60а, 60b) зажимного узла (32а, 32b) удерживаются соответствующими прутковыми элементами (58а, 58b) и выполнены в виде прижимных тарелок, прижимаемых своей наружной кромкой к наружной поверхности (62) автомобильного колеса (12).
2. Манипуляционный модуль по п. 1, отличающийся тем, что прижимные элементы (60а, 60b) посредством устройства (66а, 66b) поступательного движения выполнены с возможностью перемещения относительно рамной структуры (16) коаксиально оси (R) вращения захваченного автомобильного колеса (12).
3. Манипуляционный модуль по п. 1 или 2, отличающийся тем, что несколько зажимных узлов (32а, 32b), предпочтительно все зажимные узлы, включают в себя по одному устройству (66а, 66b) поступательного движения.
4. Манипуляционный модуль по п. 1, отличающийся тем, что прижимные элементы (60а, 60b) первого зажимного узла (32а, 32b) выполнены с возможностью перемещения независимо от прижимных элементов (60b, 60а) второго зажимного узла (32b, 32а).
5. Манипуляционный модуль по п. 1, отличающийся тем, что зажимные узлы (32а, 32b) выполнены таким образом, что захваченные зажимными узлами (32a, 32b) автомобильные колеса (12) выровнены осепараллельно друг другу относительно их осей (R) вращения.
6. Манипуляционный модуль по п. 1, отличающийся тем, что зажимной узел (32а, 32b) включает в себя по меньшей мере три прутковых элемента (58а, 58b) с прижимной тарелкой (60а, 60b).
7. Манипуляционный модуль по п. 1, отличающийся тем, что по меньшей мере одно положение прижимных элементов (60а, 60b) относительно рамной структуры (16) является определяемым посредством по меньшей мере одного датчикового устройства (68а, 68b).
8. Манипуляционный модуль по п. 7, отличающийся тем, что датчиковое устройство (68а, 68b) выполнено таким образом, что определяемым является любое положение прижимных элементов (60а, 60b).
| JP 2010094796 A, 30.04.2010 | |||
| JPH 06170658 A, 21.06.1994 | |||
| US 2009035107 A1, 05.02.2009 | |||
| JP 2008260110 A, 30.10.2008;RU 2384515 C2, 20.03.2010.. |

