Изобретение относится к устройству аварийного торможения кабины лифта согласно ограничительной части п.1 формулы изобретения.
Лифты оборудуются тормозными или ловильными устройствами или комбинированными ловильно-тормозными устройствами. Они служат для того, чтобы в случае недопустимо высокой скорости движения (так называемой сверхпредельной скорости), например при ошибках управления, отказе привода или его тормоза или же в случае обрыва каната, можно было затормозить посредством воздействующих на рельсы фрикционных тел и остановить кабину лифта в пределах допустимых значений. При этом под тормозными устройствами обыкновенно подразумеваются такие устройства, которые предупреждают сверхпредельную скорость кабины лифта при движении вверх за счет столь большого торможения кабины лифта по отношению к рельсам, что она останавливается, а противовес в конце пути движения надлежащим образом располагается на амортизаторах, в результате чего завершается незапланированное движение кабины. В соответствии с этим ловильными устройствами обычно считаются устройства, которые предупреждают сверхпредельные скорости движения вниз и при этом, будучи приведенными в действие, захватывают кабину лифта, т.е. фиксируют ее на коротком пути движения по рельсам. Такие тормозные, ловильные и двунаправленные ловильно-тормозные устройства ниже обозначаются для простоты в целом как «тормозные устройства».
Дополнительно лифты оборудуются, как правило, тормозом на стороне привода, независимым от указанного выше тормозного устройства. Этот тормоз всегда срабатывает в том случае, когда обесточивается привод и называется обыкновенно предохранительным контуром.
Приведение в действие тормозного устройства в известных устройствах производится ограничителем скорости, который неподвижно установлен в шахте или машинном отделении. При движении кабины лифта ограничитель скорости приводится во вращение. Для этого служит замкнутый ограничительный канат, который изменяет свое направление, с одной стороны, на ограничителе скорости (обычно в наиболее высокой точке шахты) и, с другой стороны, на натяжном ролике (обычно в наиболее низкой точке шахты). В определенном месте ограничительный канат соединен с тормозным или ловильным устройством кабины лифта, в результате чего при движении кабины лифта он совершает совместное с ней движение. При слишком большой скорости движения ограничитель скорости блокирует ограничительный канат, вследствие чего срабатывает тормозное или ловильное устройство и кабина лифта останавливается.
Такая конструкция имеет то преимущество, что она является чисто механической и поэтому на ней отрицательно не сказывается прекращение подачи электроэнергии. Вместе с тем ей присущи и некоторые недостатки. Во-первых, она подвержена повреждениям, именно потому, что она является чисто механической, а также подвержена значительному износу, по меньшей мере, при длительном сроке эксплуатации. По этой причине скорость срабатывания, обусловленная инертными массами такой конструкции, заметно зависит от ускорения, и при возникновении больших ускорений срабатывание уже происходит в том случае, когда кабина лифта достигла существенно меньшей скорости. При сильном загрязнении конструкции срабатывание происходит иногда слишком поздно (т.е. при значительном превышении скорости). Другим недостатком является относительно большая стоимость сооружения. Несмотря на собственно тормозное устройство требуется также наличие проходящего по всей шахте каната, который должен быть расположен вверху и внизу и быть в натянутом состоянии.
Другой недостаток заключается в том, что это механическое решение уже изначально действует только в случае превышения одной заданной скорости и поэтому без особых мероприятий невозможно задавать для разных участков шахты разные максимально допустимые скорости движения кабины лифта. При современных высокоскоростных лифтах этого часто оказывается недостаточно, так как их скорость достигает, например, 10 м/с. Поэтому своевременное торможение должно произойти до остановки на последнем этаже (верхнем или нижнем). Если кабина лифта находится на втором этаже при движении вниз, то даже скорость 5 м/с считается очень большой и поэтому необходимо применять аварийное торможение.
Наконец, это известное техническое решение имеет и тот недостаток, что проходящий вдоль всей шахты канат занимает место. В некоторых случаях это вызывает неудобство, в частности при выполнении кабин лифта с расположенными на углу дверями, а также при использовании панорамных лифтов с большой площадью остекления. Кроме того, проходящий по всей шахте канат ограничителя скорости препятствует уменьшению размеров верхней части шахты и ее приямка.
Для дифференцированного аварийного торможения более приемлемым является решение на основании электроники. Уже имеются соответствующие предложения. Из патента US 5020640 на аналогичное устройство известно тормозное устройство для лифта, в котором скорость движения кабины определяется с помощью приводного колеса, по которому перемещается несущий канат.
Этому известному устройству присуща проблема, заключающаяся в том, что в случае обрыва каната устройство отказывает. Другой недостаток состоит в том, что требуется (по меньшей мере) одна дополнительная линия от кабины лифта до машинного отделения для передачи скорости вращения приводного колеса на кабину лифта. Наконец, и само расположенное на одном конце несущего каната и совершающее совместное движение простое приводное колесо также является не полностью совершенным и имеются трудности приведения приводного колеса в любой момент действительно в надежное взаимодействие с несущим канатом. Кроме того, приводное колесо, совершающее совместное движение с несущим канатом, лишь условно при длительной эксплуатации лифта пригодно решать с необходимой точностью определенные задачи, например выполнение точного контроля за местоположением кабины лифта, поскольку с течением времени происходит некоторое удлинение несущего каната. В частности, со временем может происходить суммирующее проскальзывание несущего каната на его приводном колесе.
Из US 5366045 известно устройство для обслуживания стеллажей, в котором консоль расположена на стойке с возможностью подъема и опускания и в котором предусмотрено наличие соответствующего тормозного устройства, срабатывающего при слишком высокой скорости движения консоли. При этом смежно со стойкой расположено колесо, связанное с тахометром. Этот тахометр соединен с устройством для определения слишком большой скорости, которым приводится в действие тормозное устройство. Данное решение не обладает достаточной надежностью применительно к лифту. На колесо может легко попасть масло или жир, вследствие чего оно будет проскальзывать на стойке и, следовательно, в случае обрыва каната тахометр не покажет превышения скорости. По этой причине довольно усложняется выполнение и других задач, как, например, точный контроль за местоположением.
Изобретение имеет своей целью устранить приведенные недостатки и предложить устройство аварийного торможения упомянутого выше типа, обеспечивающее надежную регистрацию вероятной сверхпредельной скорости движения кабины лифта и способствующее при регулярной эксплуатации лифта с высокой точностью управлению или регулировке кабины лифта.
Согласно изобретению это достигается в устройстве аварийного торможения указанного выше типа с помощью отличительных признаков п.1 формулы изобретения. Благодаря предложенным мерам обеспечивается положение, при котором, с одной стороны, даже в случае обрыва каната может регистрироваться скорость движения кабины лифта, так как эта регистрация не зависит от несущего канала. Благодаря расположению двух колес, которые одни или вместе с другим колесом, с которым каждое из них жестко связано, приводят в действие детектор и прилегают предпочтительно к единственному направляющему рельсу, достигается преимущество, состоящее в избыточности, так как может сравниваться скорость колес между собой. Аварийное торможение происходит уже тогда, когда слишком большой скорости достигло только одно колесо.
Другое преимущество предложенных в п.1 формулы изобретения мероприятий состоит в том, что для «нормальной эксплуатации» лифта, т.е. для эксплуатации лифта при скорости движения кабины в пределах максимально допустимой скорости движения кабины, получают без существенных дополнительных затрат точную информацию о мгновенном местоположении, скорости и/или ускорении кабины лифта.
В п.2 формулы изобретения предусмотрены оптимальные средства. С их помощью легко могут быть обнаружены повреждения, вызванные износом подшипников колес или самих колес, неисправностью детектора, отказом пружины растяжения или ухудшением условий трения.
Предусмотренные в п.3 формулы изобретения средства обеспечивают еще более точный контроль за надлежащим функционированием колес и их детекторов. Идеально, чтобы по каждому колесу регулярно запоминались сигналы детекторов, благодаря чему по каждому колесу образуется более или менее достоверная кривая, а именно кривая, которая показывает для совершенно конкретной установки характеристику соответствующего сигнала детектора в полный или частичный период эксплуатации установки. Эта кривая позволяет получать как надежные сведения о тенденции, как, например, о «возрастающем износе колес и вызываемом этим уменьшении наружного диаметра» или о «возрастающем загрязнении колес/подшипников», так и надежно прогнозировать внезапные происшествия, такие как «из-за слишком обильной смазки рельс после технического обслуживания колеса не обладают более надежным фрикционным замыканием». Кроме того, кривая позволяет обоснованно оценить возможно происшедшие «выпадающие значения» сигналов детекторов.
Предусмотренные в п.4 формулы изобретения оптимальные средства обеспечивают положение, при котором эксплуатация лифта в случае нарушения, которым не является сверхпредельная скорость, может завершиться надлежащим образом с исключением бесконтрольной остановки кабины лифта.
Предусмотренное в п.5 формулы изобретения применение пружины растяжения, в частности работающей на растяжение винтовой пружины, противоречит тому, что присуще собственно пружинам, ответственным за безопасность. Ответственные за безопасность пружины изначально выполнялись в виде пружин сжатия. Однако в данном случае применение пружины растяжения является оптимальным, так как при этом более надежно можно определить ее вероятное разрушение. На участке разрушения пружины сжатия в некоторых случаях ее витки могут сцепляться между собой или упираться друг в друга. В результате первое время сохраняется некоторое пружинение. Таким образом, разрушение пружины при неблагоприятных условиях не всегда может быть сразу определено. Иначе обстоит дело в отношении пружины растяжения. В случае обрыва единственной пружины (в ее наиболее нагруженной точке, которой является проушина) она немедленно становится полностью непригодной, что при избыточном применении вторых колес сразу обнаруживается, так как колесо внезапно теряет свое фрикционное замыкание и вследствие этого прекращается подача генерируемого им сигнала. Аномалия определяется электронным блоком аварийного торможения и принимаются соответствующие меры.
Предложенное в п.6 формулы изобретения оптимальное расположение колес относительно друг друга и относительно направляющего рельса повышает надежность при эксплуатации и детектировании, так как здесь дело обстоит иначе, чем при использовании двух колес, воздействующих на два разных рельса (или на разнесенные между собой на значительное расстояние участки одного и того же рельса), при таком расположении исключается положение, при котором фрикционное замыкание всех колес с направляющим рельсом временно нарушается в какой-либо форме вследствие движений кабины лифта, вызванных сотрясением, допусками, эластичностью, вибрацией или скручиванием, поперечно направлению движения.
Предложенная в п.7 формулы изобретения мера является оптимальной именно для избыточной системы из двух колес. Эта мера также позволяет просто и надежно определить выход из строя колесной системы и, следовательно, потерю избыточности. Также при этом немедленно происходит оптическая индикация дефекта.
Предложенные в п.8 формулы изобретения размеры колес обеспечивают надежный фрикционный контакт между колесом и направляющим рельсом. Это особенно важно для таких лифтов, кабины которых скользят по направляющим рельсам, так как выяснилось, что при использовании скользящей направляющей колеса могут принудительно проходить через имеющийся на направляющих рельсах слой смазки, если они являются достаточно узкими, при этом соответственно выбираемое усилие прижатия колес к рельсу не будет иметь неприемлемо высокие значения. В зависимости от материала, выбранного для колес или их бандажа, их рабочая часть может иметь вид лезвия, причем ширину колес в рабочей части предпочтительно уменьшают до 1,5-4 мм и увеличивают в направлении к ступице.
Предложенный в п.10 формулы изобретения и выполненный предпочтительно в виде закрепленной в кабине аккумуляторной батареи автономный источник энергопитания электронного блока аварийного торможения обеспечивает безопасность в самом крайнем случае. Электронный блок аварийного торможения остается работоспособным и управляемым через приданные ему электромеханические исполнительные органы (реле и пр.) в том случае, когда по какой-либо причине мгновенно прерываются линия питания током и сигнальная линия, связанная с закрепленным в шахте электронным блоком или управляющим устройством лифта.
Предусмотренные в п.11 формулы изобретения средства контроля или средства калибрования определения положения кабины лифта позволяют применять изначально точные детекторные сигналы в течение длительного времени для точного определения положения кабины лифта. Положение кабины лифта определяется с помощью электронного блока лифта автономно на основе сигналов детекторов. Сразу после проезда мимо эталонной (предпочтительно единственной) позиции в шахте электронный блок лифта получает опорный сигнал. Этот опорный сигнал соответствует точно заданному положению кабины лифта в шахте. Он сравнивается с соответствующим мгновенным значением, полученным на основе сигнала детектора. При обнаружении недопустимо большого расхождения происходит автоматическое калибрование, преимущественно при следующей остановке кабины лифта. Затем снова проводится определение положения автономно от кабины. Таким образом, положение кабины лифта может длительное время определяться с высокой точностью. При этом не требуются обстоятельные, проходящие по всей шахте эталонные маркировки, определяемые из кабины лифта.
Целесообразно расположить оба колеса согласно п.18 формулы изобретения. Благодаря предварительному напряжению балансирной подвески с помощью пружины, которая может быть и относительно слабой, достигается относительно большое прижимное усилие обоих колес. Обусловлено это тем обстоятельством, что расстояние в свету может выбираться в обоих роликах лишь незначительно превышающим ширину головки направляющего рельса, а пружина может воздействовать на большом расстоянии от точки поворота балансирной подвески, при этом точка поворота располагается предпочтительно между обоими колесами. При этом в результате мгновенного уравновешивания достигается соответственно большое усилие прижатия роликов к направляющему рельсу. Другим решающим преимуществом такого расположения является то, что оба колеса прижимаются с одинаковым усилием к направляющему рельсу. Это важно в том случае, когда на основе сравнения мгновенной частоты вращения колес от трения о рельсы необходимо провести функциональный контроль, а именно в случае, когда ролики имеют более или менее эластичное покрытие.
Благодаря признакам п.19 формулы изобретения достигается преимущество, при котором практически полностью исключается проскальзывание, так как в том случае, когда проскальзывает только одно из связанных между собой через вал колес, то другое колесо приводит в действие вал в случае, когда трение является достаточным для движения колеса. В результате случайное проскальзывание одного из колес не оказывает воздействия на регистрацию скорости кабины лифта.
Благодаря признакам п.20 формулы изобретения достигается преимущество, при котором вал, соединяющий между собой два расположенных на разных балансирных подвесках колеса, при соответствующем управлении исполнительным органом через трубу, может привести в действие тормозное устройство. Это представляет собой своего рода сервоподдержку, для которой энергия поступает от роликов. При этом исполнительный орган может быть выполнен в виде соленоида, который в случае срабатывания тормозного устройства, т.е. при слишком большой скорости движения кабины лифта, обесточивается, в результате чего пружина приводит фрикционное колесо в положение, в котором оно контактирует с другим фрикционным колесом, жестко связанным с валом. Вследствие эксцентричного расположения одного из фрикционных колес оба фрикционных колеса заклиниваются, в результате чего происходит соединение U-образного профиля с валом и он захватывается. В результате происходит проворачивание трубы и в действие приводится тормозное устройство. Недостатком такого решения является то, что длину вала и трубы необходимо приводить в соответствие с шириной кабины лифта (или с расстоянием между направляющими рельсами). Этот недостаток можно устранить с помощью признаков п.13 формулы изобретения. В этом случае могут быть предусмотрены отдельные воздействующие на каждый направляющий рельс тормоза, управляемые исполнительными органами, которые в свою очередь управляются совместно.
Другие свойства и преимущества решения согласно изобретению четко поясняются с помощью чертежей и разных примеров осуществления решения согласно изобретению. При этом изображено на:
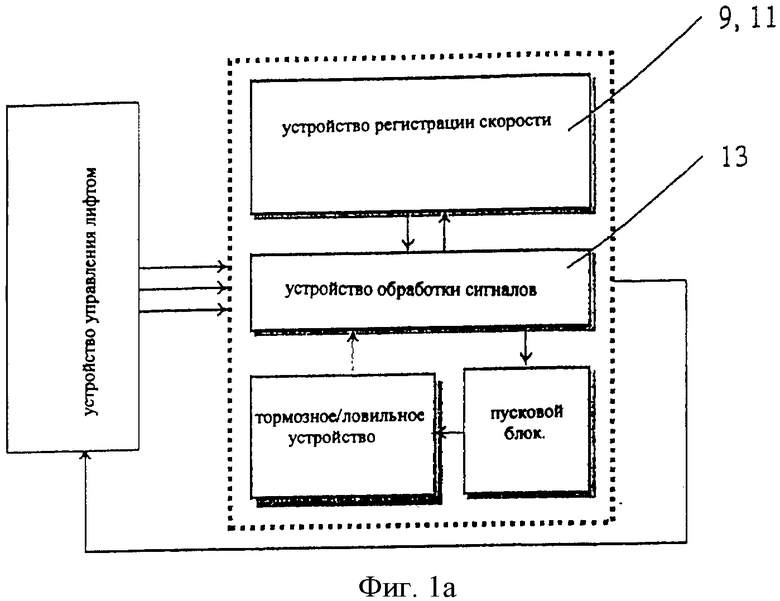
фиг.1a - абстрактно, принципиальное построение системы с учетом информационного потока;
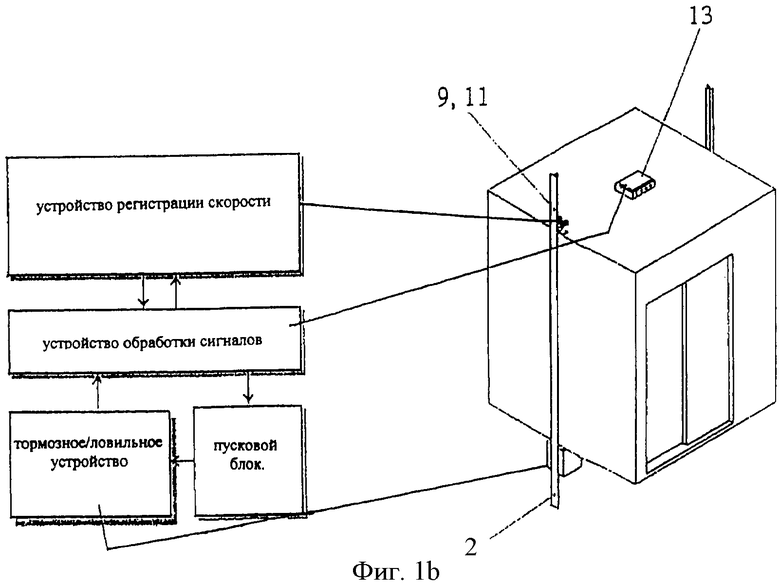
фиг.1b - абстрактно, принципиальное построение системы и расположение отдельных компонентов системы на кабине лифта;
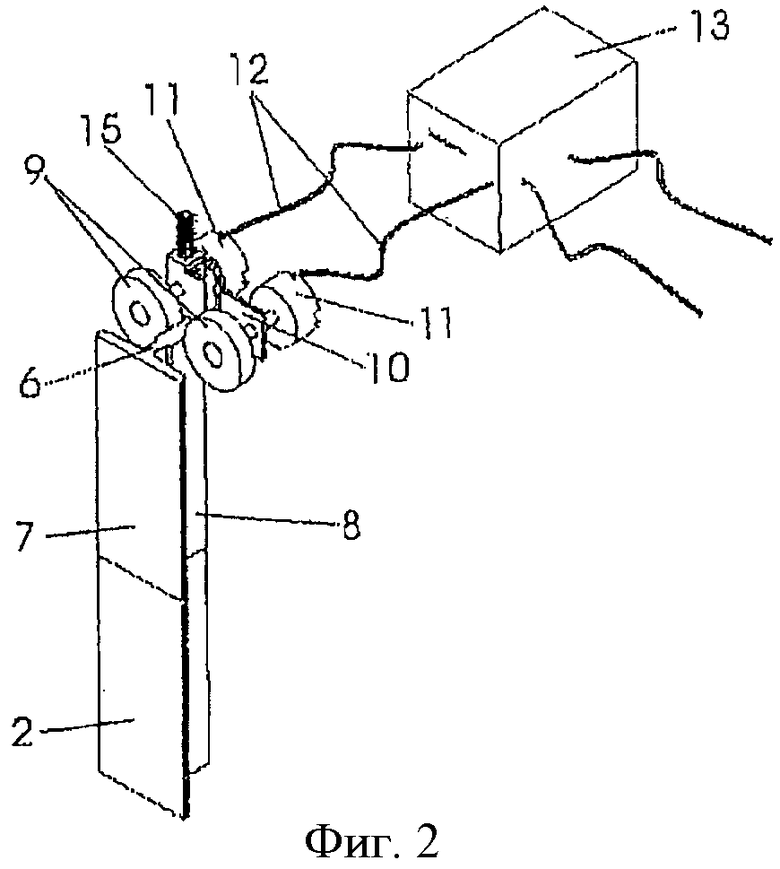
фиг.2 - первый вариант выполнения системы согласно изобретению (без тормозного устройства, приводного агрегата лифта и закрепленного в шахте электронного блока лифта);
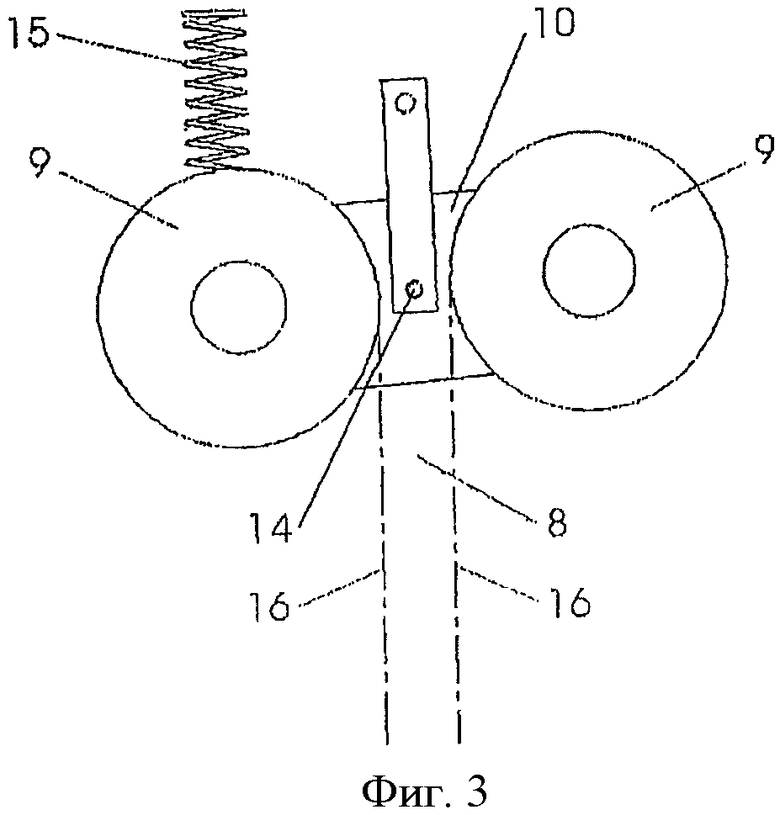
фиг.3 - подробности с учетом расположения колес и их предварительного напряжения по отношению к направляющему рельсу;
фиг.4а - изометрическое изображение альтернативного колесно-детекторного блока системы на фиг.2;
фиг.4b - альтернативный колесно-детекторный блок на фиг.4а, в разобранном виде (изображено без натяжных пружин и продолжений кантилевера);
фиг.4 с - альтернативный колесно-детекторный блок в собранном виде на фиг.4b, взаимодействующий с направляющим рельсом;
фиг.4d - альтернативный колесно-детекторный блок на фиг.4а, вид сверху;
фиг.5 - избыточное выполнение электронного блока аварийного торможения и приданных ему исполнительных органов;
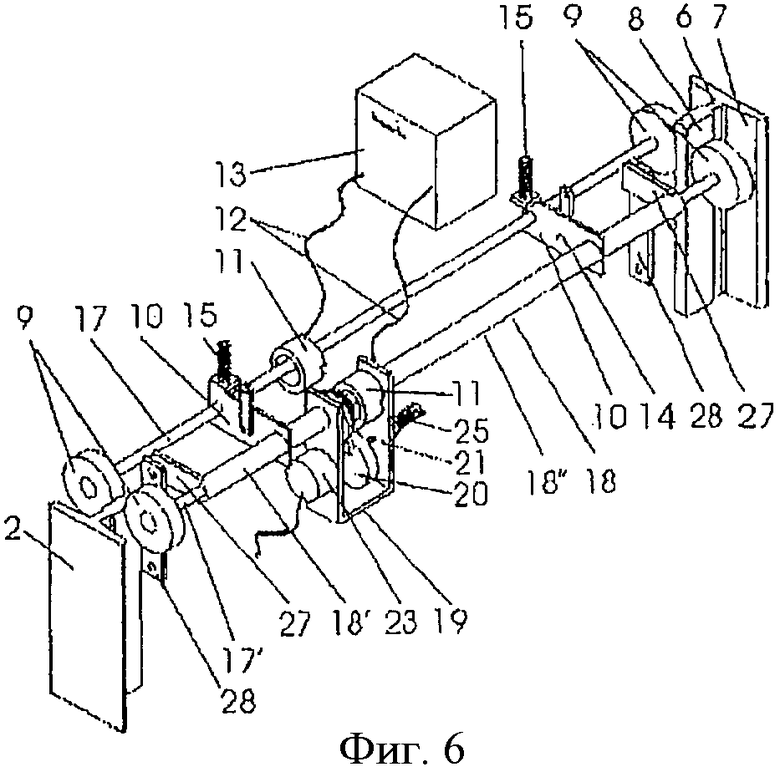
фиг.6 - схематически детектор на фиг.1 в сочетании с работающим в виде сервоустройства исполнительным устройством тормозного устройства в аксонометрии;
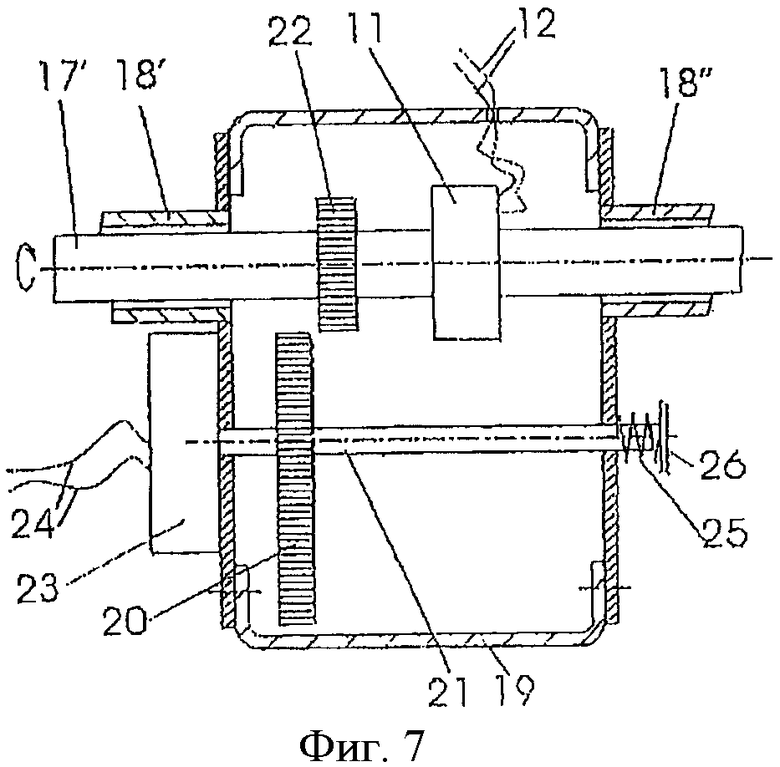
фиг.7 - сечение по захватному устройству на фиг.6;
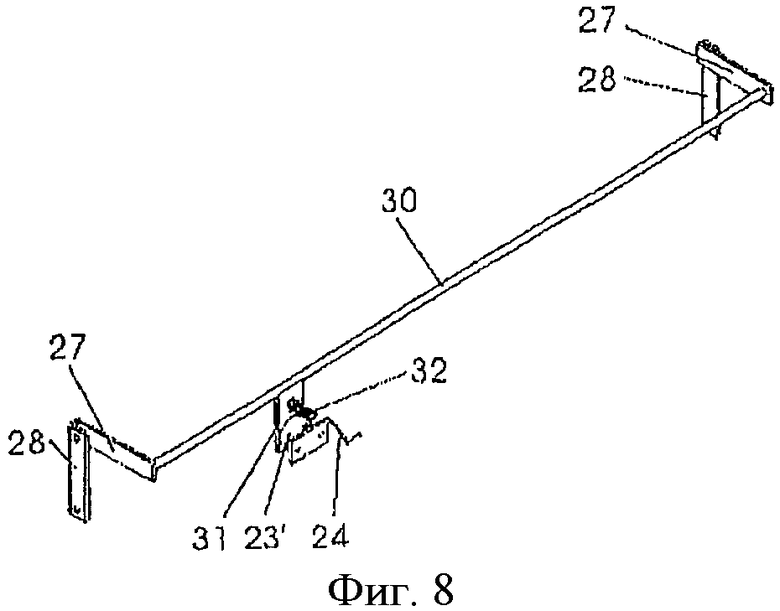
фиг.8 - схематически пусковое устройство для тормозного устройства;
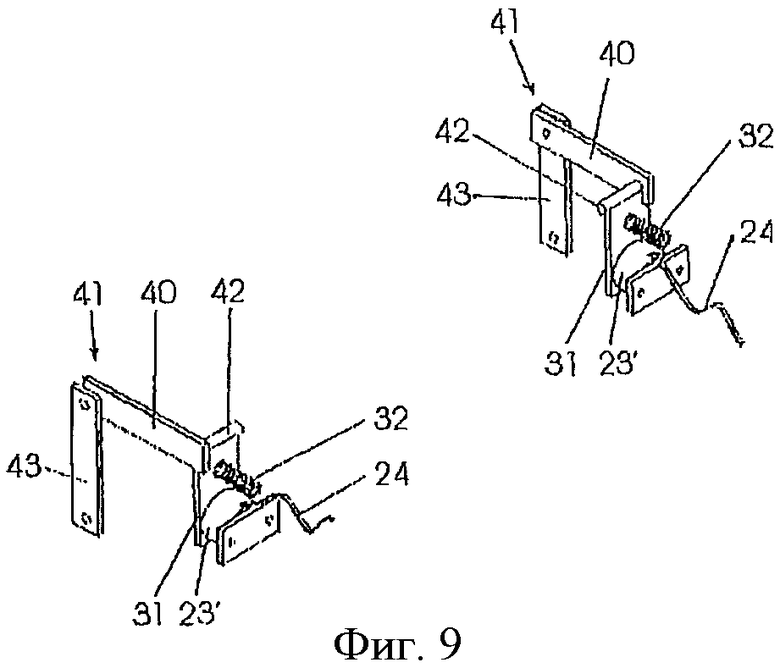
фиг.9 - схематически другой вариант выполнения пускового устройства для тормозного устройства.
Принципиальное построение системы
На фиг.1 показано принципиальное построение системы. На кабине (т.е. для совместного движения) закреплен, по меньшей мере, один блок, обозначаемый в данном случае в целом как устройство для регистрации скорости, состоящий из колес 9 и детекторов 11, выполненных в данном случае в виде кодеров, а также крепежных элементов. Также закреплены на кабине электронный блок 13 аварийного торможения, называемый устройством обработки сигналов, который в случае сверхпредельной скорости, или недопустимых ускорений, или неконтролируемых движений кабины лифта подает сигнал для аварийного торможения, пусковой блок для приведения в действие тормозного или ловильного устройства и само тормозное или ловильное устройство, которое далее называется в целом тормозным устройством. На фиг.1 показан закрепленный в шахте (т.е. в самой шахте или в ее отделении для привода) общий электронный блок лифта, обозначаемый здесь как управляющее устройство лифта. В него подаются генерируемые устройством регистрации скорости сигналы преимущественно через электронный блок 13 аварийного торможения по подвесному канату или беспроводным способом. Согласно другому варианту выполнения электронный блок аварийного торможения может быть соединен, минуя электронный блок 13 аварийного торможения, непосредственно с устройством регистрации скорости. Через электронный блок лифта возможно дистанционное управление некоторыми функциями электронного блока аварийного торможения. К ним относятся, в частности, приведение в действие и отключение тормозного устройства. Таким образом, возможна целенаправленная блокировка кабины лифта и затем ее приведение в движение (в случае применения тормозного устройства, которое под действием собственного веса или при подъеме кабины лифта снова расцепляется и приводится в длительное электромеханически расторможенное положении). Это важно в отношении обеспечения зон обслуживания, которые еще будут упомянуты ниже.
Система отличается множеством мероприятий по обеспечению избыточности или повышению эксплуатационной надежности, а именно в отношении как надежного приведения в действие в случае неисправности, так и надежного предупреждения приведения в действие при безаварийной эксплуатации или по возможности надежного измерения местоположения, скорости и/или ускорения. Эти мероприятия являются важными для обеспечения пригодности системы, призванной заменить применяемые до настоящего времени чисто механические или в значительной степени механические аварийные тормоза.
Узлы, состоящие их колес и приданных детекторов (устройство регистрации скорости)
Построение изображенного на фиг.2 устройства регистрации скорости показано на фиг.2-5. При этом представлены на фиг.2 и 3 первый и на фиг.4 и 5 второй примеры выполнения устройства регистрации скорости.
Как показано на фиг.2, направляющие рельсы 2 содержат головку 8, связанную с основанием 7 рельса через его шейку 6.
На фигурах 2 и 3 можно видеть, что в первом примере выполнения к обеим боковым поверхностям головки 8 рельса прилегают колеса 9 предпочтительно своим непоказанным фрикционным покрытием или бандажом. Непоказанное прилегание колес выполнено таким образом, что только одно колесо прилегает к боковой поверхности головки рельса, а другое может прилегать к узкой, смещенной на 90° торцевой поверхности, однако из-за отказа от соответствующих преимуществ оно находится на заднем плане. Колеса 9 выполнены автономными от направляющих роликов кабины лифта, которые вследствие приходящихся на них нагрузок непригодны для рассматриваемого здесь назначения. В первом примере выполнения колеса установлены на балансирной подвеске 10 (см. также фиг.3) с возможностью вращения и жестко связаны каждое с детектором 11. Балансирная подвеска 10 закреплена с возможностью поворота вокруг оси 14 между обоими колесами 9 и нагружена пружиной сжатия. Пружина 15 опирается на непоказанную опору и обеспечивает поворот балансирной подвески 10 и тем самым прижатие колес 9 к обеим боковым поверхностям 16 головки 8 рельса.
Ось поворота балансирной подвески 10 проходит по существу над продольной осью участка, образующего головку 8 рельса. Поскольку расстояние в свету между обоими колесами 9 лишь незначительно превышает ширину головки 8 рельса, а пружина 15 воздействует на балансирную подвеску 10 на значительном расстоянии от оси 14, то образуется соответствующий эффект рычага. И даже при относительно слабой пружине 15 может достигаться большое и очень равномерное усилие прижатия колес 9.
Показанные на фиг.2 детекторы 11 соединены через сигнальные линии 12 с электронным блоком 13 аварийного торможения для определения слишком большой скорости. Как уже упоминалось, электронный блок 13 аварийного торможения идеально перемещается вместе с кабиной лифта и работает автономно, при обнаружении недопустимой сверхпредельной скорости движения только одного колеса он автономно от другого, жестко закрепленного в шахте, электронного блока лифта производит торможение кабины до ее остановки. Таким образом, исключается воздействие возможного дефекта подвесного кабеля, по которому обеспечивается связь между электронным блоком кабины лифта и жестко закрепленным в шахте электронным блоком лифта, на функцию безопасности.
Кроме того, показанные на фиг.2 детекторы 11 могут быть соединены с жестко установленным в шахте электронным блоком лифта, и таким образом, направлять в этот электронный блок сигнал детектора (фиг.1а), который находит в нем многообразное применение.
В рамках непоказанного, но предпочтительного варианта развития первого примера выполнения предусматривается, чтобы - в противоположность тому, как это принято в отношении пружин безопасности, - балансирная подвеска 10 нагружалась не пружиной сжатия, а только единственной пружиной растяжения. Если эта пружина растяжения разрушится (в ее наиболее нагруженном месте, которым является проушина), то ролики сразу теряют свой постоянно заданный фрикционный контакт с рельсом. Балансирная подвеска начинает вибрировать. В этом случае детекторы подают соответствующий аномальный сигнал. Аномалия опознается электронным блоком аварийного торможения.
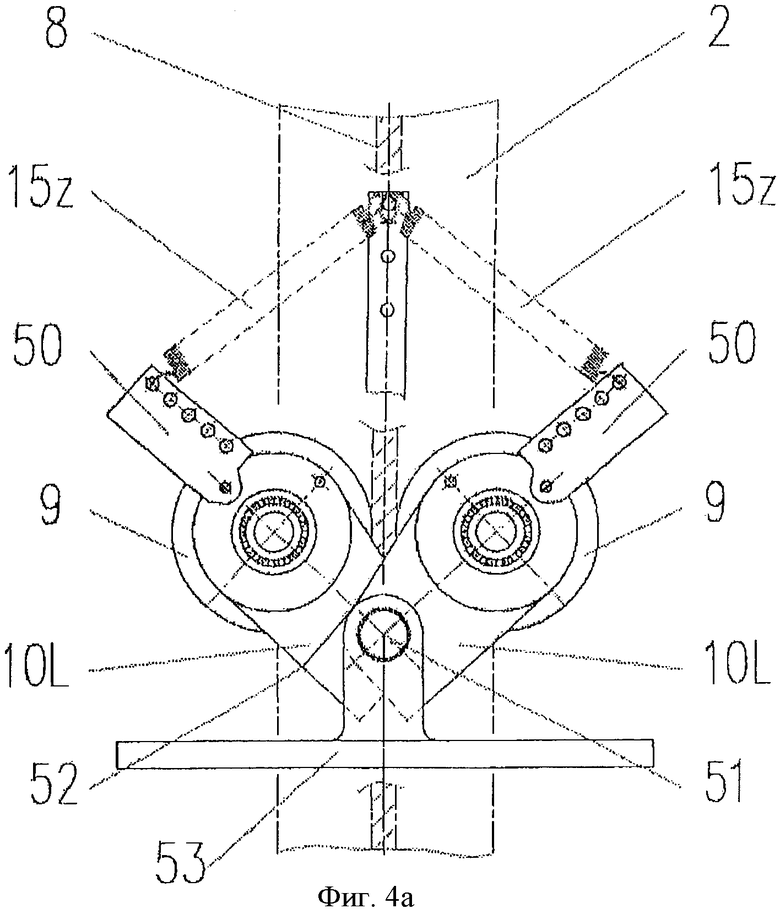
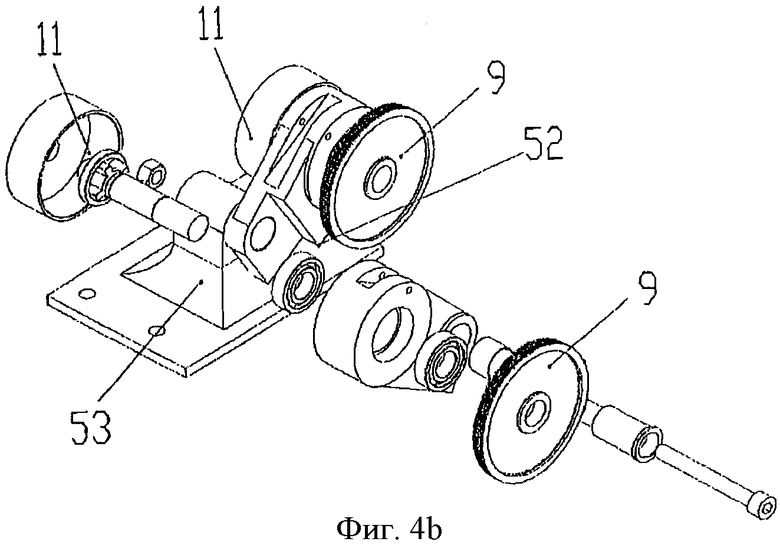
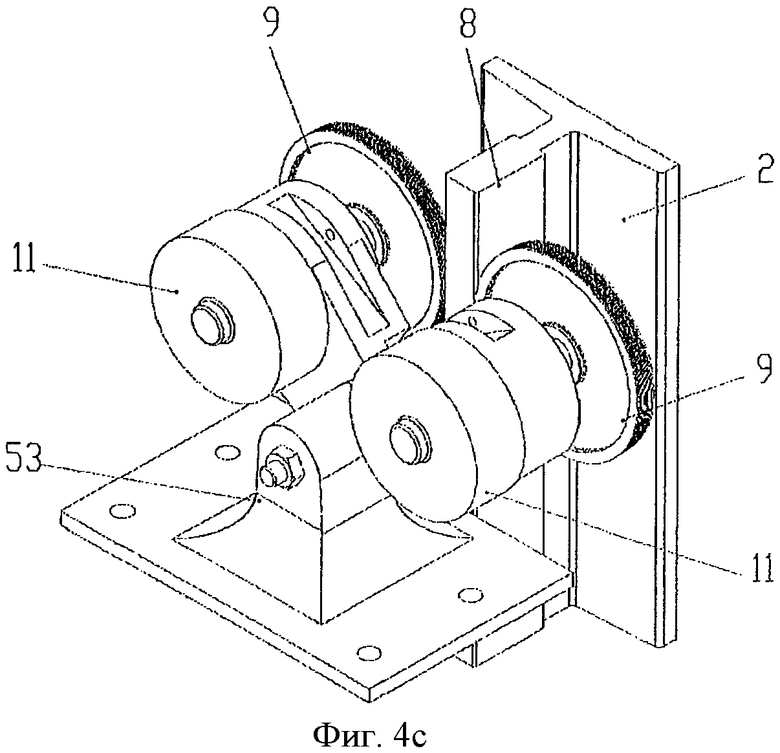
Более оптимальное решение на случай отказа пружины обеспечивает с точки зрения избыточности второй пример выполнения, показанный на фигурах 4а-4с.
Этот второй пример выполнения отличается от описанного выше первого только тем, как расположены и предварительно нагружены колеса 9. В остальном, т.е. в отношении не показанных на фигурах 4а- 4с конструктивных элементов, второй вариант соответствует описанному первому варианту.
Во втором варианте выполнения колеса не располагаются на совместной балансирной подвеске. Вместо этого каждое из обоих колес 9 установлено на отдельном рычаге 10L подвески. Оба рычага 10L подвески в свою очередь консольно установлены на кронштейне 53 подшипника, в частности, таким образом, что вместе с установленными с возможностью вращения колесами 9 они лежат в одной плоскости. Каждый из рычагов 10L подвески снабжен продолжением 50, выступающим над кромками 9. На продолжение 50 воздействует пружина растяжения 15z, которая предварительно нагружает рычаг 10L подвески в направлении к поверхности рельса и, таким образом, поджимает установленный на нем ролик 9 к соответствующей поверхности рельса. Продолжение 50 каждого рычага подвески создает эффект кантилевера, благодаря которому и здесь относительно слабая пружина 15z является достаточной для достижения большого прижимного усилия для соответствующего колеса 9.
Совместная подшипниковая ось 51 рычагов 10L подвески расположена таким образом, что рычаг подвески, пружина растяжения 15z которого разрушилась, под действием силы тяжести выйдет наружу из положения, которое он ранее занимал под действием нагружающей пружины. В результате соответствующее колесо 9 отойдет вверх от предназначенной для него поверхности рельса и остановится, другое же колесо 9 будет продолжать работать. Таким образом, возможное разрушение пружины будет немедленно опознано, детекторное устройство же в целом останется работоспособным. Для полноты изложения необходимо добавить, что каждый рычаг 10L подвески содержит соответствующий упор 52, ограничивающий угол, на который может разворачиваться рычаг подвески (фиг.4b). Таким образом, упор 52 препятствует соответствующему рычагу подвески разворачиваться вниз настолько, чтобы другая сторона колеса 9 снова пришла в контакт с рельсом и в результате этого колесо «произвольно» было приведено в действие.
Избыточность/автоматический контроль системы
Колеса 9, детекторы 11 и соответствующие схемы электронного блока 13 аварийного торможения выполнены избыточными и автоматически контролирующими следующим образом.
Колеса 9 расположены в непосредственной близости друг к другу на двух разных сторонах головки 8 рельса, чем уже достигнута избыточность на стороне колес. И поскольку всякий раз, когда колесо 9 разгружается по отношению к рельсу, другое колесо 9 соответственно больше нагружается и поэтому со своей стороны подает на всякий случай точный сигнал детектора.
Избыточность присутствует и в отношении детекторов 11, так как каждому колесу 9 придан собственный детектор 11.
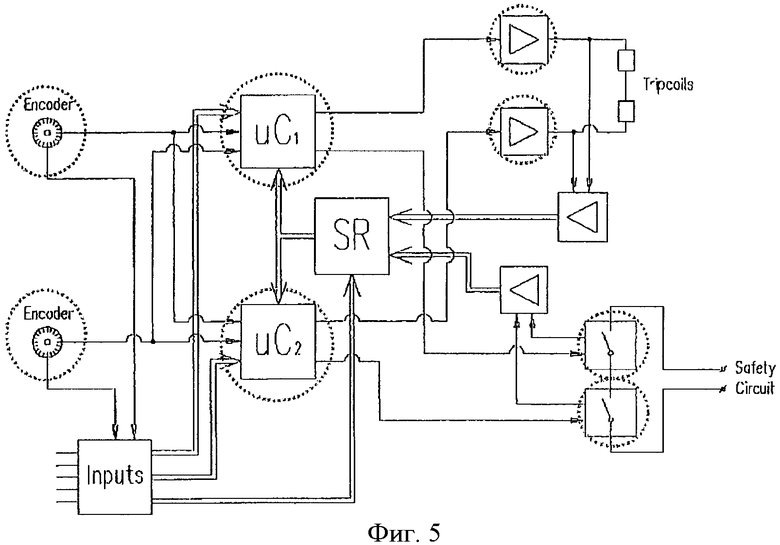
На фиг.1b показано, что и схемы электронного блока 13 аварийного торможения, предназначенные для обработки сигналов детектора или кодера, являются полностью избыточными, т.е. здесь использована концепция двух параллельно работающих электронных блоков обработки результатов с автономной периферией, так как каждому детектору 11 в электронном блоке 13 аварийного торможения придан отдельный электронный блок ”uC1” или ”uC2” обработки результатов. Если, по меньшей мере, один из электронных блоков обработки результатов фиксирует недопустимую скорость, которая однако ниже сверхпредельной скорости, то он немедленно обесточивает привод и таким образом останавливает лифт для устранения дефекта путем вмешательства извне.
Если же разница частоты вращения обоих детекторов превышает заданное значение, то привод обесточивается после достижения лифтом следующей остановки. В результате этого тормозное действие производит не только двигатель, но также и тормоз на стороне привода, так как он не может долго находиться в расторможенном состоянии при использовании электромагнита. Если только один из электронных блоков обработки результатов определяет, что достигнута даже сверхпредельная скорость, то он воздействует на схему, называемую катушкой отключения (независимо от действий другого блока обработки результатов), и таким образом приводит в действие собственно тормозное устройство, которым производится торможение кабины на рельсах.
Дополнительно следует отметить, что электронному блоку аварийного торможения придана (не показанная на чертеже) аккумуляторная батарея для автономного энергоснабжения в аварийном случае.
Дефекты в электронном блоке аварийного торможения определяются в результате того, что через каждый коммутационный элемент периодически подаются тестовые импульсы (т.е., например, модулированный детекторный сигнал, который мог бы привести к определенному действию). Ответный сигнал направляется обратно через контрольный блок снова в соответствующий электронный блок, в результате чего функциональность оценивается сравнением с ответным сигналом, ожидаемым при надлежащем функционировании.
Дефекты в исполнительных органах, в частности в электромагнитах или реле, могут опознаваться за счет того, что для проверки на соответствующий исполнительный орган периодически подаются короткие отключающие импульсы. Таким образом определяется заземление и короткое замыкание.
Если в ходе периодической проверки электронных блоков или исполнительных органов обнаруживается (вероятный) дефект, то предполагаемый ошибочный сигнал записывается, по меньшей мере, вторично. Если результаты проверки подтвердились, то предохранительный контур на следующей остановке размыкают и таким образом останавливают кабину лифта.
Многофункциональное использование, по меньшей мере, одного сигнала детектора
Закрепленный в шахте электронный блок лифта использует обработанный или не обработанный ранее электронным блоком 13 аварийного торможения детекторный сигнал при нормальной эксплуатации лифта, во-первых, для точного определения мгновенного положения кабины лифта, т.е. в конечном итоге для полного или частичного копирования шахты.
Если в распоряжении имеется, как в данном случае, постоянная информация или поступающая с короткими перерывами информация и она относится к мгновенному положению кабины лифта, то эту кабину можно быстро и точно остановить на соответствующей остановке, т.е. так позиционировать ее, чтобы пол кабины лифта и пол соответствующего этажа располагались точно на одинаковом уровне, т.е. чтобы исключались места для спотыкания.
Точная информация о мгновенном положении кабины лифта используется также для повышения безопасности при посадке и выходе из кабины лифта, а именно для предупреждения непреднамеренного смещения кабины лифта из своего первоначального положения остановки. Такое более или менее быстрое смещение происходит под действием весовой разницы между кабиной и противовесом в том случае, когда тормоз привода не работает надлежащим образом и, следовательно, кабина лифта не оказывается зафиксированной на месте остановки. Как только на основании сигнала детектора будет определено смещение кабины на недопустимо большую величину, то в показанном примере выполнения приводится в действие тормозное устройство и смещение кабины прекращается. В другом, не показанном на фигурах, примере выполнения предусмотрено наличие на кабине лифта, по меньшей мере, одного дополнительного электрического клещевого тормоза обычной конструкции, который служит не как тормозное устройство в приведенном выше смысле, а как дополнительный рабочий тормоз для фиксации кабины лифта на месте остановки.
Если, как в данном примере выполнения, предусмотрено опережающее открытие двери, то сигнал детектора одновременно используется и для очень точного определения надлежащего момента для начала опережающего открытия двери, так как кабина лифта останавливается на таком расстоянии от дверного проема, что опережающее открытие дверей может производиться без риска.
В этом примере выполнения сигнал детектора используется также для обеспечения зоны, необходимой для выполнения работ по техническому уходу. После поступления сигнала в электронный блок лифта с сообщением о нахождении людей в шахте (возможно, потому что от одной из блокировок дверей поступил сигнал об открытии двери в момент, когда кабина лифта еще не находилась на месте остановки перед соответствующим шахтным проемом), электронный блок контролирует положение кабины лифта и препятствует тому, чтобы кабина лифта при движении или непреднамеренно вследствие смещения заняла положение, нарушающее зону обслуживания. Для обеспечения временной зоны обслуживания кабину лифта фиксируют целевым срабатыванием тормозного устройства в положении, в котором окончательно обеспечивается зона обслуживания, при этом блокируется с геометрическим замыканием либо кабина, либо противовес с использованием опор, стопорных болтов и пр.
В том случае, когда произошел захват кабины лифта или она застряла и требуется аварийное освобождение, сигнал детектора позволяет быстро и очень точно определить местонахождение кабины лифта, что упрощает аварийное освобождение именно в многоэтажных зданиях, в частности, также аварийное освобождение при пожарах, когда в распоряжении спасателей имеется экстремально мало времени для обеспечения себе пути подхода к находящимся в закрытом пространстве людям (при необходимости, имея при себе тяжелое оборудование).
Также сигнал детектора применяется для контроля передачи движущей силы трением в канатных лифтах, так как он позволяет без нахождения внутри шахты и осмотра основных компонентов лифта очень точно определить, перемещает ли несущий канат кабину лифта вверх при нахождении противовеса на сжатых амортизаторах. Кроме того, на основании сигнала детектора во время приемки лифта определяют, соблюдается ли высота подъема.
Наконец, с помощью сигнала детектора очень легко тестировать функционирование или эффективность тормозного устройства. Для этого в виде теста вызывают срабатывание тормозного устройства. Затем на основании сигнала детектора определяют, является ли эффективным действие тормозов и насколько или же после какого отрезка пути кабина лифта будет уловлена и остановлена.
Здесь это не показано, но в рассмотренном примере выполнения предусмотрено в виде опции проведение контроля или коррекции сигнала детектора с помощью, по меньшей мере, одной находящейся в шахте эталонной маркировки. Всякий раз, когда кабина лифта минует эталонную маркировку (например, в виде контакта, реагирующего на прикосновение или дистанционно), вырабатывается дополнительный сигнал о местоположении. Это используется для контроля и/или периодического калибрования сигнала детектора, т.е. с ним сравнивают соответствующий по времени мгновенный сигнал, по меньшей мере, одного детектора 11.
Во-вторых, электронный блок использует сигнал детектора также для определения мгновенной скорости кабины лифта для того, чтобы осуществлять систематическое управление или регулировку скорости кабины лифта.
Таким образом, в зависимости от высоты подъема задаются и соблюдаются разные скорости, причем на участке высоты подъема, расположенном достаточно далеко от самого низкого и самого высокого конечных положений кабины лифта, допускаются большие скорости движения. Это имеет преимущество, в частности, в многоэтажных домах, в которых кабина лифта перемещается к удаленному месту остановки без промежуточных остановок. Повышенными скоростями движения в этом случае считаются скорости, величина которых в зоне конечных положений кабины лифта, например, во время приближения к самой нижней остановке является недопустимой, так как в случае внезапной потери контроля в этой зоне нельзя будет обеспечить положение, при котором расположенные на дне шахты амортизаторы будут в состоянии принять на себя кабину лифта с допустимым запаздыванием. Если же в соответствии с изобретением обеспечивается положение, при котором кабина лифта перемещается в близкой к амортизаторам зоне перед самым нижним местом остановки и без того с пониженной скоростью, то одновременно можно также уменьшить высоту амортизаторов (т.е. расстояние, на которое оседают амортизаторы при столкновении). Сказанное действительно и для случая, когда кабина лифта приближается к самому верхнему месту остановки.
Для того чтобы в зависимости от высоты подъема можно было задавать разные скорости движения, сигнал детектора одновременно используется для установления разных предельных показателей для разных участков шахты, при превышении которых скорость считается недопустимо большой или даже недопустимо сверхпредельной и, следовательно, должны приниматься меры, начиная от отключения привода до улавливания кабины лифта. В идеальном случае, как это имеет место в данном примере выполнения, электронный блок 13 аварийного торможения автономно задает мгновенные предельные значения в зависимости от сигнала детектора (т.е. в зависимости от местоположения кабины) и передает их в закрепленный в шахте электронный блок лифта, в результате чего достигается синхронность. Для движений лифта вверх и вниз могут задаваться разные предельные значения недопустимо большой или сверхпредельной скорости.
Наконец, сигнал детектора используется для постепенной реакции на непредусмотренные скорости. При слишком большой скорости, еще до достижения сверхпредельной скорости, при которой срабатывает тормозное устройство, сначала обесточивается привод, после чего начинает действовать приданный приводу тормоз и, как правило, вместе с обесточенным двигателем кабина лифта затормаживается настолько, что сверхпредельная скорость не наступает. Если это не помогает, а сигнал детектора сообщает о достижении сверхпредельной скорости, приводят в действие тормозное устройство.
В третьих, электронный блок использует сигнал детектора для определения мгновенного ускорения кабины лифта. Таким образом, можно определить возможную неисправность, выражающуюся через сверхпредельное ускорение, еще до момента достижения сверхпредельной скорости, благодаря чему становится возможным очень рано принять контрмеры.
В заключение необходимо отметить, что, само собой разумеется, изобретение сохраняется в прежнем объеме в том случае, когда сигнал детектора используется только с одной из приведенных целей.
Факультативная сервоподдержка для срабатывания тормозного устройства
Согласно варианту выполнения на фиг.6 к каждому из обоих направляющих рельсов 2 прилегает по два колеса 9, закрепленных на балансирных подвесках 10. При этом каждые два прилегающие к разным направляющим рельсам 2 колеса 9 жестко соединены между собой валом 17, 17', вокруг которого размещен детектор 11. Например, при каждом обороте вала 17 детекторы 11 выдают импульс. При этом вал 17' заключен в трубу 18, состоящую из двух отдельных труб 18', 18'', причем эти обе трубы 18' 18'' связаны между собой U-образным профилем 19. При этом детектор 11 располагается между обеими полками U-образного профиля 19.
Как детально показано на фиг.7, между полками U-образного профиля 19 на валу 17' жестко установлено фрикционное колесо 22. Оно взаимодействует с другим фрикционным колесом 20, установленным без возможности смещения в осевом направлении, но с возможностью вращения на толкающей штанге 21 (в качестве альтернативы вращающейся может быть также толкающая штанга 21, в этом случае фрикционное колесо 20 будет жестко установлено на толкающей штанге 21). Толкающая штанга 21 проходит через обе полки U-образного профиля 19 и крепится внутри соленоида 23, который через управляющие линии 24 соединен с устройством 13 (фиг.6) и управляется им. Кроме того, на толкающую штангу 21 (фиг.7) воздействует пружина 25 (выполненная в виде пружины сжатия), опирающаяся на наружную сторону первой полки U-образного профиля 19 и на заплечик 26 толкающей штанги 21. В изображенном соответствующем нормальной эксплуатации положении фрикционного колеса 20 соленоид 23 является возбужденным и удерживает фрикционное колесо 20, преодолевая усилие пружины 25, от взаимодействия с фрикционным колесом 22. В результате этого труба 18 остается в своем положении. Однако при развозбуждении соленоида 23, например при регистрации слишком большой скорости движения кабины лифта (или в случае прекращения подачи электроэнергии или аварийного питания), под действием пружины 25 происходит смещение толкающей штанги 21 вправо, в результате чего фрикционное колесо 20 входит в контакт с фрикционным колесом 22 и приводится им во вращение.
Поскольку фрикционное колесо 20 установлено эксцентрично, то оно заедает, так как расстояние между валом 17' и толкающей штангой 21 рассчитано на минимальное расстояние между боковой поверхностью фрикционного колеса 20 и его эксцентричной осью вращения. В результате этого происходит захват U-образного профиля 19 и труба 18 проворачивается. Поскольку труба 18 или трубные отрезки 18', 18'' жестко связаны рычагами 27 (фиг.3), которые в свою очередь соединены с рычагами 28 подвески, воздействующими на непоказанное тормозное устройство, взаимодействующее с направляющими рельсами 2, то в этом случае тормозное устройство приводится в действие и кабина лифта затормаживается.
На фиг.8 схематически показан дополнительный вариант выполнения пускового устройства для тормозного устройства. При этом предусмотрено наличие вала 30, с которым жестко соединен уступ 31, который взаимодействует с электромагнитом 23' и на который воздействует пусковая пружина 32. На обоих концах вал 30 связан с рычагами 27, которые соединены с рычагами 28 подвески, воздействующими на непоказанное тормозное устройство. В возбужденном состоянии электромагнита вал 30 и, следовательно, рычаги 27 остаются в положении, в котором тормозное устройство не приводится в действие и находится в нерабочем состоянии. При развозбуждении электромагнита 23' пусковая пружина 32 вызывает проворачивание вала 30 и тем самым рычагов 27, в результате чего тормозное устройство приводится в действие и кабина лифта останавливается. Согласно варианту выполнения на фиг.9 на плече 40 коленчатого рычага 41, выполненного поворотным вокруг оси 42, закреплен уступ 31, который взаимодействует с электромагнитом 23' и на который воздействует пусковая пружина 32. При этом электромагнит 23' и пусковая пружина 32 воздействуют, при нормальном расстоянии от оси, на уступ 31. В результате происходит соответствующее проворачивание коленчатого рычага после развозбуждения электромагнита 23', при этом другое плечо 43 коленчатого рычага 41 приводит в действие непоказанное тормозное устройство. В варианте выполнения на фиг.6 на участке каждого направляющего рельса 2 расположены коленчатые рычаги 41, причем оба электромагнита 23' управляются совместно.
В заключение следует отметить, что, само собой разумеется, изобретение может найти применение также и в таких системах лифтов, в которых несколько кабин лифтов перемещаются в одной шахте, не отступая при этом от изобретения.

Изобретение относится к устройству аварийного торможения кабины лифта. Устройство содержит электронный блок, тормозное и детекторное устройства. Детекторное устройство содержит два колеса. Каждое колесо приводит в действие детектор, сигнал которого задает величину угла поворота или частоту вращения соответствующего колеса. Электронный блок использует сигналы детекторов. Сигналы детекторов используются во время работы лифта в диапазоне допущенных скоростей для определения величины, характеризующей путь, скорость и/или ускорение. Технический результат заключается в повышении точности управления аварийным режимом торможения кабины лифта. 20 з.п. ф-лы, 9 ил.
1. Лифт, содержащий кабину, перемещающуюся в шахте по направляющим рельсам (2), электронный блок, в том числе для управления или регулирования движения, и устройство аварийного торможения для предупреждения сверхпредельных скоростей движения кабины лифта, причем устройство аварийного торможения содержит тормозное устройство и детекторное устройство (9, 11), сигнал которого при достижении сверхпредельной скорости движения кабины лифта приводит в действие тормозное устройство, отличающийся тем, что детекторное устройство (9, 11) содержит, по меньшей мере, два колеса (9), которые прилегают к направляющему рельсу (2) и из которых каждое колесо приводит в действие детектор (11), сигнал которого задает величину угла поворота или частоту вращения соответствующего колеса, при этом электронный блок устроен таким образом, что он многофункционально использует сигналы детекторов, причем, по меньшей мере, один сигнал детектора используется во время работы лифта в диапазоне допущенных скоростей для определения, по меньшей мере, одной величины, характеризующей путь, скорость и/или ускорение и воздействующей на дальнейшую работу лифта, при этом электронный блок приводит в действие тормозное устройство в том случае, когда, по меньшей мере, один из детекторов (11) своим сигналом сообщает о сверхпредельной скорости движения кабины лифта, лежащей за пределами допущенного диапазона скоростей.
2. Лифт по п.1, отличающийся тем, что предусмотрены средства контроля за функционированием детекторов, причем сигналы разных детекторов, выполненных преимущественно в виде кодеров, сравниваются между собой для определения недопустимой степени расхождения.
3. Лифт по п.1, отличающийся тем, что предусмотрены средства для запоминания сигналов детекторов, по меньшей мере, через определенные интервалы и для сравнения последующих сигналов детекторов с хранящимся в памяти сигналом детектора или сигналами детекторов для получения сведений о текущем состоянии или режиме роликов.
4. Лифт по п.2, отличающийся тем, что предусмотрены средства для прекращения начатого движения кабины лифта на следующей плановой остановке в случае обнаружения недопустимого расхождения сигналов детекторов или недопустимой абсолютной величины сигналов детекторов.
5. Лифт по п.1, отличающийся тем, что колеса (9), предпочтительно каждое колесо в отдельности, прижимаются к соответствующей поверхности рельса посредством пружины растяжения (15z), выполненной предпочтительно в виде винтовой пружины, с обеспечением фрикционного замыкания.
6. Лифт по п.1, отличающийся тем, что к единственному направляющему рельсу прилегают два колеса (9) таким образом, что одно колесо движется по одной стороне головки (8) рельса, а второе колесо по противоположной стороне головки (8) рельса предпочтительно на одинаковом уровне с первым колесом, в результате чего вызванное сотрясениями, эластичностью, допусками разгружение одного колеса (9) относительно поверхности, по которой он движется, усиливает нагружение другого колеса (9) относительно поверхности, по которой он перемещается, и таким образом исключается одновременное разгружение обоих колес (9).
7. Лифт по п.6, отличающийся тем, что каждое отдельное колесо (9) установлено с помощью соответствующего рычага (10L) подвески таким образом, что при отказе пружины (15z), прижимающей колесо с фрикционным замыканием к соответствующей поверхности (18) рельса, оно разворачивается под действием возвратной пружины или предпочтительно силы тяжести и теряет с рельсом контакт с фрикционным замыканием.
8. Лифт по п.1, отличающийся тем, что ширина каждого колеса в направлении к его оси вращения является незначительной, составляя менее 30%, в идеальном случае менее 20% от ширины направляющих средств, если смотреть перпендикулярно направлению движения кабины лифта, обеспечивающих направление кабины лифта по соответствующей поверхности рельса.
9. Лифт по п.1, отличающийся тем, что каждому детектору (11) внутри электронного блока (13) аварийного торможения приданы собственный отдельный от электронного блока другого детектора электронный блок обработки результатов и соответствующие исполнительные органы, в результате чего при обнаружении недопустимого режима движения может приводиться в действие тормозное устройство, предпочтительно тормозное устройство и независимый от него предохранительный контур, независимо от другого электронного блока и его исполнительных органов.
10. Лифт по п.1, отличающийся тем, что электронный блок (13) аварийного торможения содержит автономный источник энергоснабжения предпочтительно в виде аккумуляторной батареи.
11. Лифт по п.1, отличающийся тем, что, по меньшей мере, на одном участке шахты предусмотрены средства на кабине лифта и в шахте, которые образуют соответствующий сигнал в совершенно определенном эталонном положении кабины лифта, который сравнивается для периодического контроля и/или калибрования определения положения кабины лифта, по меньшей мере, с одним сигналом детектора или выведенным из него сигналом положения.
12. Лифт по п.1, отличающийся тем, что электронный блок использует, по меньшей мере, один сигнал детектора для определения мгновенного положения кабины лифта во время остановки для точного позиционирования кабины лифта и/или для воздействия на опережающее открытие двери.
13. Лифт по п.1, отличающийся тем, что электронный блок использует, по меньшей мере, один сигнал детектора для контроля за положением кабины лифта при проведении работ по техническому обслуживанию лифта для обеспечения предписанной зоны обслуживания, причем электронный блок предпочтительно выполнен таким образом, что он приводит в действие тормозное устройство/ловильное устройство в том случае, когда возникает угроза для поддержания достаточной зоны обслуживания.
14. Лифт по п.1, отличающийся тем, что электронный блок использует, по меньшей мере, один сигнал детектора для проверки способности передачи движущей силы трением и для определения того, что кабина лифта перемещается вверх при нахождении противовеса на амортизаторах.
15. Лифт по п.1, отличающийся тем, что электронный блок использует, по меньшей мере, один сигнал декодера в качестве величины мгновенной скорости движения кабины лифта для того, чтобы в зависимости от высоты подъема или расстояния от верхней части шахты и ее приямка можно было задавать разные и/или максимальные скорости движения кабины лифта.
16 Лифт по п.1, отличающийся тем, что электронный блок использует, по меньшей мере, один сигнал декодера для постепенного приведения в действие предохранительного контура и затем тормозного устройства.
17. Лифт по п.1, отличающийся тем, что электронный блок использует, по меньшей мере, один сигнал декодера в качестве величины мгновенного ускорения кабины лифта и срабатывает в случае превышения максимального ускорения.
18. Лифт по п.1, отличающийся тем, что оба колеса (9) установлены на закрепленной с возможностью поворота балансирной подвеске (10) по обеим сторонам направляющего рельса (2), при этом балансирная подвеска (10) предварительно нагружена одной, предпочтительно двумя пружинами (15).
19. Лифт по п.1, отличающийся тем, что к двум расположенным друг против друга направляющим рельсам (2) прилегают два установленных на балансирной подвеске (10) колеса (9), причем каждые два прилегающих к разным направляющим рельсам (2) колеса (9) связаны между собой валом (17, 17').
20. Лифт по п.19, отличающийся тем, что один из двух валов (17') пропущен через трубу (18), соединенную с тормозным устройством, причем труба (18) является составной и оба обращенных друг к другу конца двух отрезков труб (18', 18''), составляющих трубу (18), жестко связаны между собой U-образным профилем (19), между полками которого расположена толкающая штанга (21), нагруженная пружиной (25) и перемещаемая исполнительным органом (соленоидом 23) с преодолением усилия пружины (25), связанным с устройством (13) управления тормозным устройством, в результате чего расположенное на толкающей штанге (21), эксцентрично установленное и неподвижное по оси фрикционное колесо (20) может приводиться в контакт с установленным на валу (17') другим фрикционным колесом (22).
21. Лифт по п.1, отличающийся тем, что тормозные устройства для обоих направляющих рельсов управляются через раздельные управляющие устройства, причем исполнительные органы управляющих устройств, выполненные в виде электромагнитов (23'), управляются совместно устройством (13) управления тормозным устройством.
| JP 5319717 А, 03.12.1993 | |||
| JP 1317977 А, 22.12.1989 | |||
| JP 2003104655 A, 09.04.2003 | |||
| СПОСОБ УПРАВЛЕНИЯ И КОНТРОЛЯ РАБОТЫ ЛИФТОВОЙ УСТАНОВКИ | 1996 |
|
RU2161117C2 |

