Перекрестные сноски на родственные заявки
Эта заявка и патент США №8073664, включенный посредством ссылки в настоящий документ, переданы компании Лэндмарк Графике Корпорейшн.
Заявление о Финансировании изобретения из Федерального бюджета
Не применимо.
Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к системам и способам позиционирования площадок под буровую установку. Более конкретно, настоящее изобретение относится к оптимальному позиционированию площадок под буровую установку, называемых иногда платформами, для разработки месторождения горизонтальными скважинами с учетом местоположения каждой горизонтальной скважины и интервала между скважинами, границ и наземных/подземных препятствий.
Уровень техники
Более, чем любой другой тип скважин, горизонтальные скважины, называемые также латеральными скважинами, должны планироваться на уровне пластового резервуара с учетом данных о местоположении площадки под буровую установку.
Также, местоположения горизонтальных скважин и интервалы между ними должны учитываться при планировании местоположений площадок под буровые установки. Дополнительно к позициям, интервалам, длинам и прочим данным, касающимся скважин, нужно также учитывать границы и препятствия при позиционировании площадок под буровые установки. Препятствия могут находиться под землей, и к ним могут относиться разломы, приповерхностный газ, или же на земле, в число которых могут входить дороги, здания, водоемы, трубопроводы, железные дороги, экологически чувствительные зоны и подобные факторы. Дополнительно к наземным препятствиям рельеф местности сам по себе не всегда благоприятствует бурению. Он может быть слишком высоким или холмистым, и тогда подготовка участка становится слишком дорогой.
Разработка месторождений с помощью горизонтальных скважин значительно расширилась за последние несколько лет, и было обнаружено, что алгоритмы проводки горизонтальных скважин работают намного лучше, если латеральные скважины позиционируются на основании существующих местоположений площадок под буровые установки. Местоположения площадок ведут к более удачным латеральным скважинам, если интервалы между площадками выбраны правильно с учетом латеральных скважин, для бурения которых они предназначены. По причине такой взаимосвязи технологии, разработанные для одноразового планирования латеральных скважин, определения позиций площадок на основании этих латеральных скважин, удаления латеральных скважин и повторного планирования на основании таких вычисленных местоположений дают хорошие результаты на простых участках, но являются менее эффективными на участках, на которых рельеф сильно мешает размещению площадок под буровые установки. Для того, чтобы учитывать менее эффективные результаты, были использованы технологии, с помощью которых группы площадок под буровые установки определяются там, где рельеф позволяет это сделать, а потом из них составляется оптимальная подгруппа местоположений площадок. Хотя эта технология дала хорошие результаты, они не являются оптимальными в плане равномерного распределения местоположений площадок по всему месторождению.
Были сделаны попытки использования алгоритмов планирования скважин для стандартных схем «нагнетатель/эксплуатационная скважина», таких, как линейная схема заводнения, для создания схем, которые можно было бы экспортировать и реимпортировать как местоположения платформ, но они оказались недостаточно оптимальными, поскольку алгоритмы планирования предназначены для создания схем, которые заполняют границы максимально возможным количеством целевых объектов, в то время как в вопросе площадок под буровые установки требуется, чтобы максимальное покрытие достигалось с помощью минимального количества местоположений этих площадок.
Были запатентованы другие традиционные подходы, такие как раскрытые в патенте США №7200540, который описывает автоматический способ генерации местоположений платформ и включает вычисление максимального количества целевых объектов, предназначенных для каждой соответствующей заданной пользователем платформы, выбор возможной группы платформ, подтверждение группы возможных местоположений путем сравнения с исключающими полигонами и определения наилучшей группы местоположений платформ. Еще одна запатентованная технология раскрыта в патенте США №6549879, который описывает способ автоматизированного позиционирования местоположений площадок для буровых скважин в два этапа, в котором позиционирование площадок под буровые установки основывается на предположении, что скважины могут быть только вертикальными, а потом изучается возможность оптимального горизонтального или наклонного завершения. Несмотря на то, что эти патентованные и непатентованные технологии могут дать приемлемые результаты, они могут быть недостаточно оптимальными для позиционирования площадок под буровые установки в вопросах, касающихся местоположения каждой горизонтальной скважины и интервалов между ними, границ и наземных/подземных препятствий.
Раскрытие изобретения
Настоящее изобретение, таким образом, соответствует вышеперечисленным потребностям и исправляет один или более недостатков в предшествующем уровне техники путем оптимального позиционирования площадок под буровые установки для разработки месторождения горизонтальными скважинами с учетом местоположения каждой горизонтальной скважины и интервалов между ними, границ и наземных/подземных препятствий.
В одном варианте осуществления настоящее изобретение представляет собой способ позиционирования множества площадок под буровые установки в пределах заранее заданной границы, включающий: а) определение максимального количества рядов на основании интервала между рядами и максимального расстояния; b) определение максимального количества столбцов на основании интервала между столбцами и максимального расстояния; c) определение местоположения исходной точки в пределах заранее заданной границы в начальной позиции каждого ряда и в начальной позиции каждого столбца, при этом местоположение каждой исходной точки принадлежит группе местоположений исходной точки; d) вычисление суммарного значения для группы местоположений исходной точки с использованием компьютерного процессора; е) корректировку начальной позиции в каждом ряду на величину приращения для ряда и начальной позиции в каждом столбце на величину приращения для столбца; f) повторение шагов c)-e) для заранее заданного количества начальных позиций в каждом ряду и заранее заданного количества начальных позиций в каждом столбце; и д) позиционирование площадки под буровую установку в каждом местоположении на основании местоположения соответствующей исходной точки в группе местоположений исходной точки, имеющей наилучшее суммарное значение.
В другом варианте осуществления настоящее изобретение представляет собой носитель программной информации, выполненный с возможностью размещения на нем выполняемых компьютером инструкций для позиционирования множества площадок под буровые установки в пределах заранее заданной границы, при этом при выполнении инструкций осуществляется: а) определение максимального количества рядов на основании интервала между рядами и максимального расстояния; b) определение максимального количества столбцов на основании интервала между столбцами и максимального расстояния; с) определение местоположения исходной точки в пределах заранее заданной границы в начальной позиции каждого ряда и в начальной позиции каждого столбца, при этом местоположение каждой исходной точки принадлежит группе местоположений исходной точки; d) вычисление суммарного значения для группы местоположений исходной точки; е) корректировка начальной позиции в каждом ряду на величину приращения для ряда и начальной позиции в каждом столбце на величину приращения для столбца; f) повторение шагов с)-е) для заранее заданного количества начальных позиций в каждом ряду и для заранее заданного количества начальных позиций в каждом столбце; и g) позиционирование площадки под буровую установку в каждом местоположении на основании местоположения соответствующей исходной точки в группе местоположений исходной точки, имеющей наилучшее суммарное значение.
Дополнительные особенности, преимущества и модификации изобретения станут очевидны специалистам в данной области из следующего описания различных модификаций и сопутствующих чертежей.
Краткое описание чертежей
Настоящее изобретение раскрыто ниже со ссылками на прилагаемые чертежи, на которых одинаковые элементы обозначены одинаковыми ссылочными обозначениями.
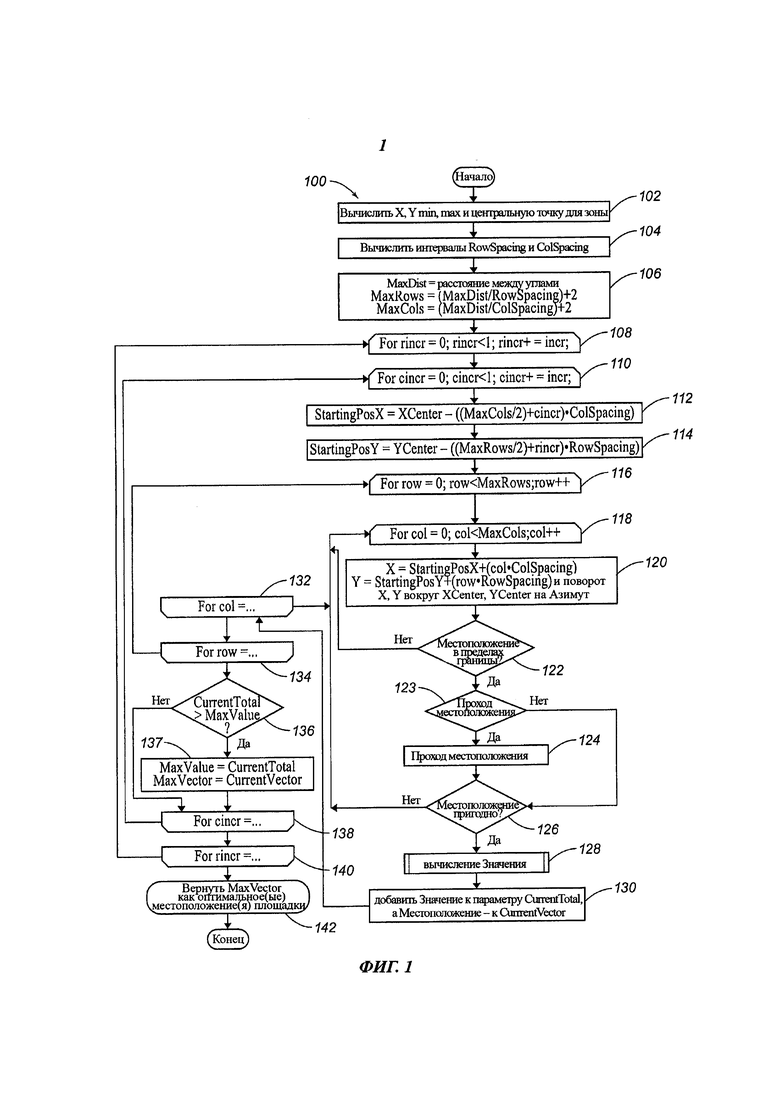
Фиг. 1 является диаграммой, иллюстрирующей один вариант осуществления способа для реализации настоящего изобретения.
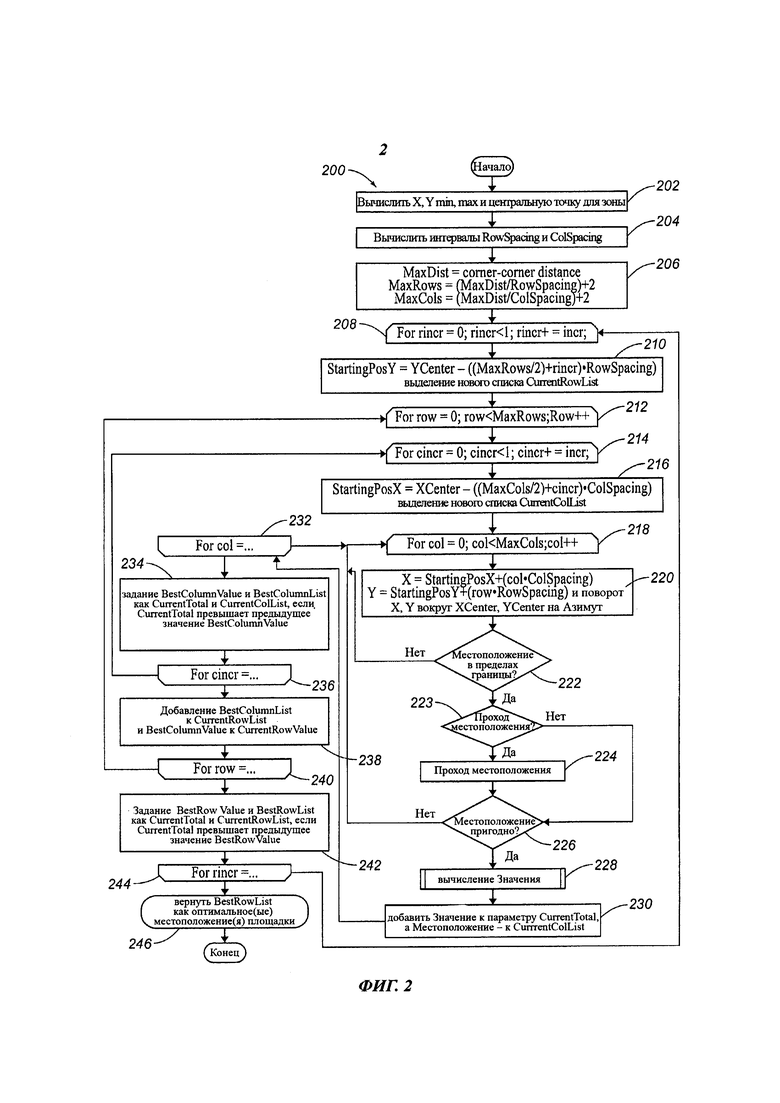
Фиг. 2 является диаграммой, иллюстрирующей другой вариант осуществления способа для реализации настоящего изобретения.
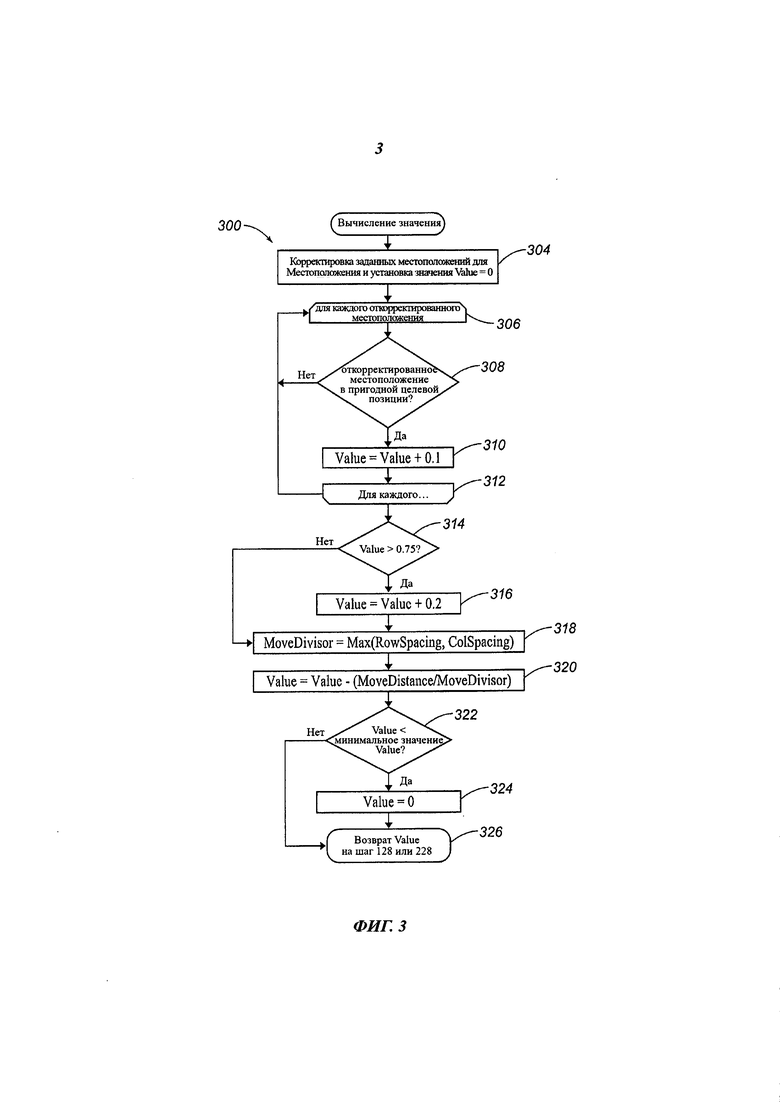
Фиг. 3 является диаграммой, иллюстрирующей один вариант осуществления алгоритма для выполнения шагов 128 и 228 на фигурах 1 и 2, соответственно.
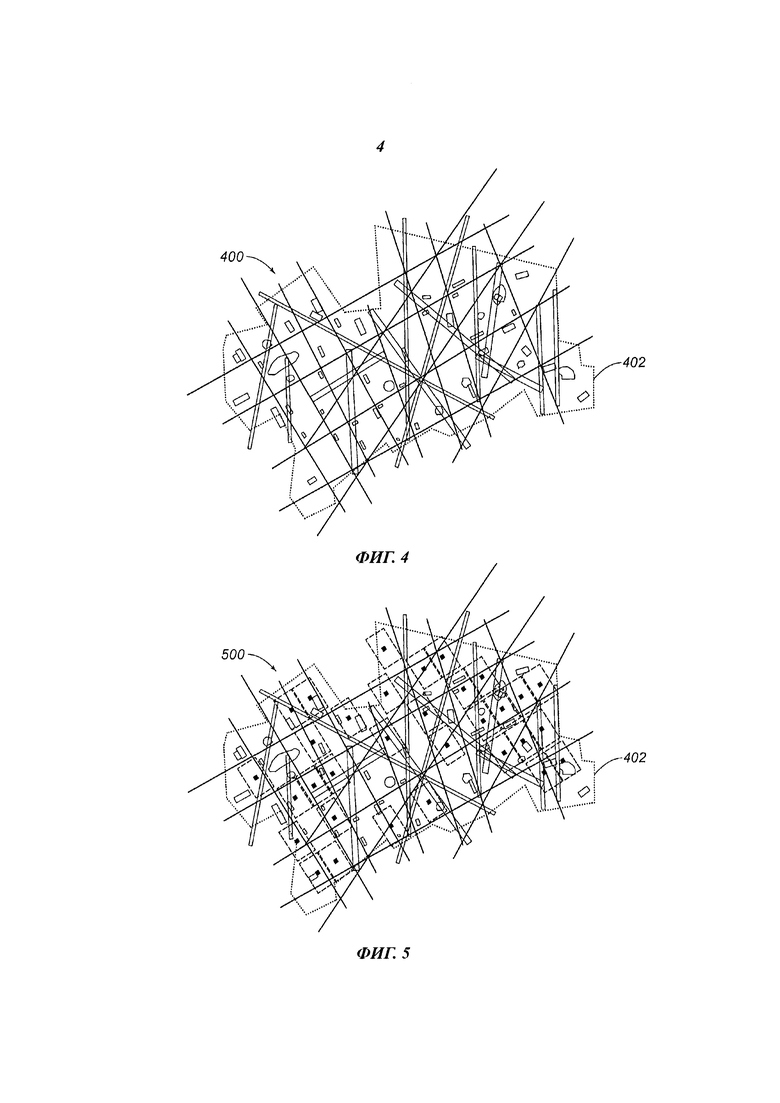
Фиг. 4 является видом сверху, иллюстрирующим заранее заданную зону для разработки месторождения горизонтальными скважинами, на которой находятся многочисленные препятствия различных размеров и форм, представляющие собой дороги, трубопроводы и здания.
Фиг. 5 является видом сверху, иллюстрирующим заранее заданную зону с фиг. 4 с теми же препятствиями и схемой расположения площадок под буровую установку с указанием рядов и столбцов, основанной на одной случайной исходной точке.
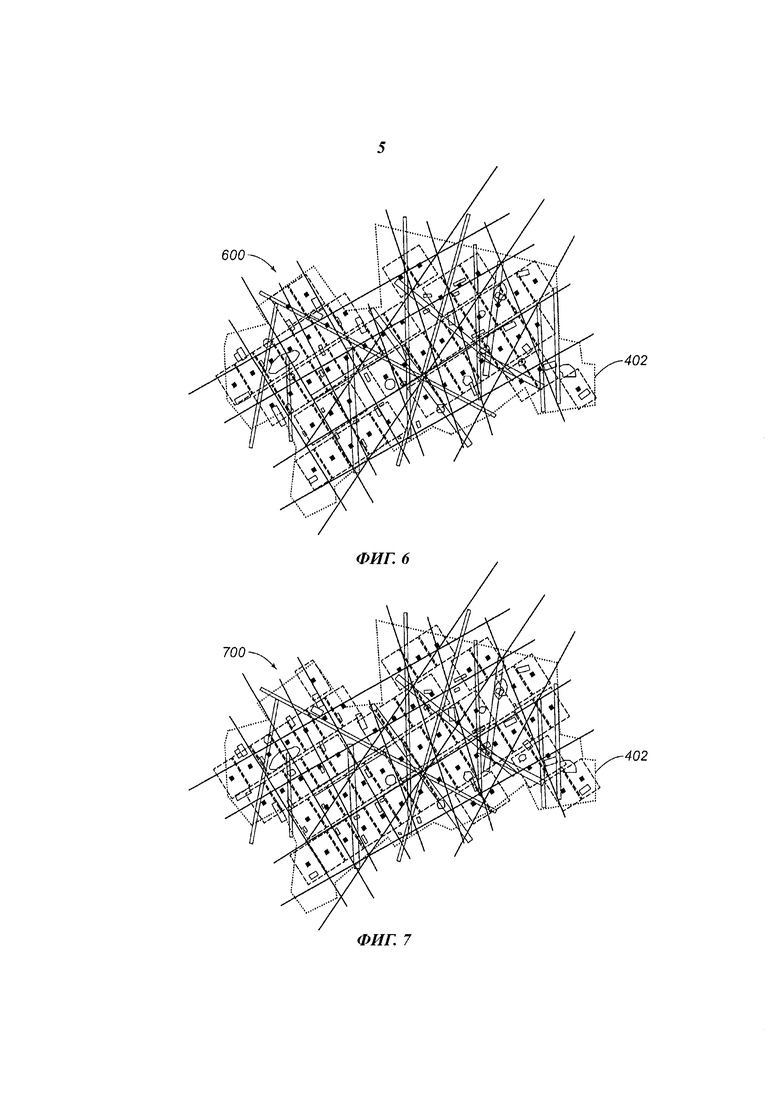
Фиг. 6 является видом сверху, иллюстрирующим заранее заданную зону с фиг. 4 с теми же препятствиями и схемой расположения площадок под буровую установку с указанием рядов и столбцов, основанной на оптимизированной исходной точке.
Фиг. 7 является видом сверху, иллюстрирующим заранее заданную зону с фиг. 4 с теми же препятствиями и оптимальной схемой расположения площадок.
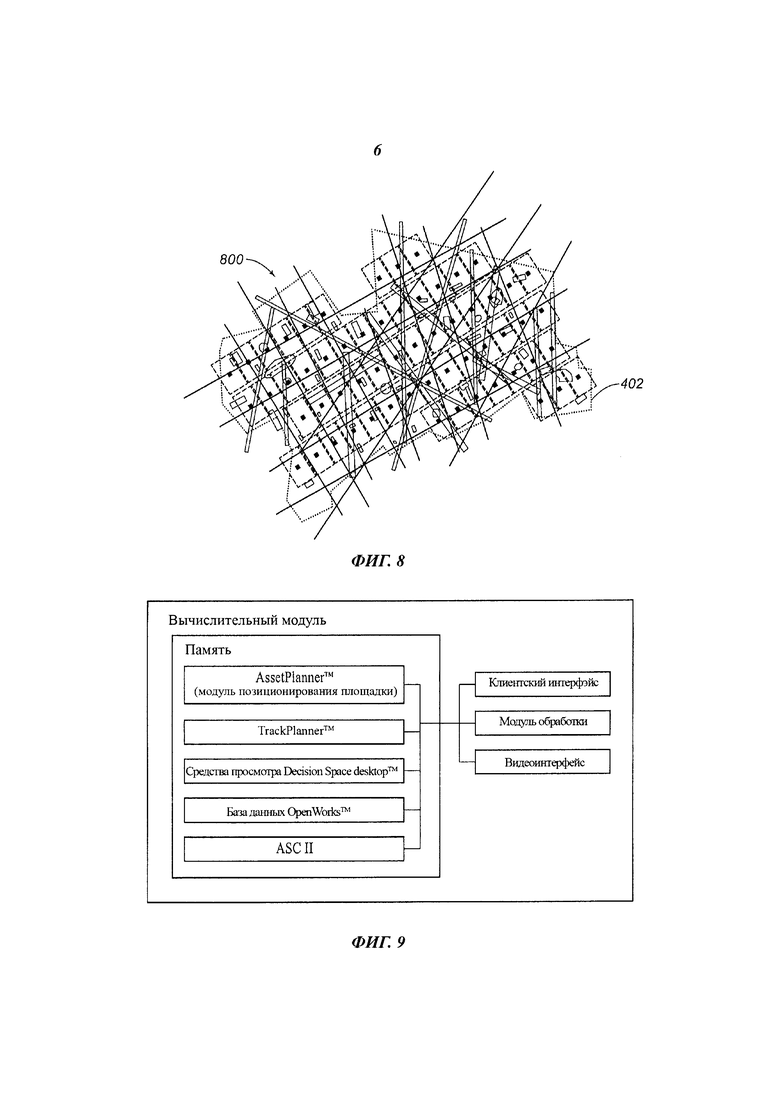
Фиг. 8 является видом сверху, иллюстрирующим заранее заданную зону с фиг. 4 с теми же препятствиями и другую оптимальную схему расположения площадок, полученную путем обхода местоположений площадок с целью исключения препятствий.
Фиг. 9 является блок-схемой, изображающей один вариант осуществления компьютерной системы для реализации настоящего изобретения.
Осуществление изобретения
Объект настоящего изобретения раскрыт с привлечением конкретных характеристик, однако данное описание не нацелено на ограничение объема изобретения. Объект изобретения может быть воплощен другими способами и может включать различные шаги или комбинации шагов, аналогичные раскрытым в данном документе, в сочетании с другими технологиями. Более того, хотя термин «шаг» может использоваться в настоящем документе для описания различных элементов используемых способов, данный термин не следует интерпретировать как подразумевающий какой-либо определенный порядок различных описанных здесь шагов, если только в описании не содержится конкретное указание на определенный порядок. Несмотря на то, что следующее описание относится к нефтегазовой отрасли, системы и способы настоящего изобретения не ограничиваются ею и могут использоваться в других отраслях для получения аналогичных результатов.
Настоящее изобретение можно использовать для создания группы площадок, которые также называются местоположениями площадок, исходя из конкретного сценария развития и используя оптимальный способ с учетом местоположения каждой горизонтальной скважины и интервалов между скважинами, границ и наземных/подземных препятствий. Для целей нижерасположенного описания, местоположение площадки означает какое-либо месторасположение, где площадку можно разместить или позиционировать оптимальным образом, точка является более общей позицией с координатами x, y, а исходная точка является точкой, от которой можно вычислить другие точки. Для любой исходной точки, исходя из требуемых интервалов между скважинами и горизонтальных длин, можно вычислить группу оптимальных местоположений площадок относительно друг друга, хотя они могут быть неоптимальными при рассмотрении границ и препятствий. Для каждого вычисленного местоположения площадки может также быть возможно определение того, не находится ли местоположение площадки в зоне препятствия, и, если так, то выполнить ее обход, используя приемы, хорошо известные в данной области, пока приемлемая «зона прохода» не будет найдена, или же пока не произойдет перемещение на слишком большое расстояние для попадания в схему, определенное максимальным расстоянием перемещения. В последнем случае местоположение площадки можно удалить из схемы местоположений площадок. Каждое местоположение площадки можно оценить на основании того, какая часть латеральной скважины находится в пределах разрешенных производственных границ сравнительно с тем какое смещение нужно сделать, чтобы не попасть в зону расположения препятствия.
Общую схему местоположений площадок можно оценить на основании суммы значений местоположения площадки. Исходя из различных исходных точек, можно создать группы местоположений площадки, значения которых можно сравнивать. Несмотря на то, что группа всех возможных исходных точек может быть бесконечной, с чисто практической точки зрения группа из одного местоположения, идущего с интервалом по рядам в направлении рядов, и идущего с интервалам по столбцам в направлении столбцов, может покрыть все возможные варианты. Наибольшей переменной может быть величина приращения, используемая для перебора в прямоугольнике возможных исходных точек. Хотя следующее описание настоящего изобретения может быть особенно полезным в крупномасштабных разработках местоположений площадок с большим количеством препятствий, оно может быть использовано и в более простых случаях.
Описание способа
На фиг. 1 изображена диаграмма, поясняющая один из вариантов осуществления способа 100 для воплощения настоящего изобретения. Способ 100 в целом имеет результатом группу местоположений площадок, которые более или менее точно расположены в рядах и столбцах.
На шаге 102 вычисляются Х, Y min, max и центральная точка для заранее заданной зоны, представляющей собой предполагаемое месторождение, с помощью технологий, хорошо известных в данной области. Вычисленные значения для (XMin-ХМах, YMin-YMax) представляют диапазон, который можно использовать для определения центральной точки ("XCenter", "YCenter") для заранее заданной зоны путем ((XMin+XMax)÷2, (YMin+YMax)÷2)). Диапазон и центральная точка отражают пределы заранее заданной зоны, где должны расположиться все возможные местоположения площадок. На фиг. 4 показан вид 400 сверху заранее заданной зоны для разработки месторождения горизонтальными скважинами. В пределах границы 402 лежит заранее заданная зона и многочисленные препятствия разного размера и формы, представляющие собой дороги, трубопроводы и/или здания. Таким образом, на этом шаге вычисляется диапазон (XMin-ХМах, YMin-YMax) и центральная точка (XCenter, YCenter), где должны расположиться все возможные местоположеня площадок для заранее заданной зоны.
На шаге 104 вычисляются интервал между рядами ("RowSpacing") и интервал между столбцами ("ColSpacing") с использованием хорошо известных в данной области технологий, размеров скважины и значений интервалов. Например, интервал между рядами (RowSpacing) можно вычислить следующим образом: к интервалу пятка-пятка скважин прибавляется интервал носок-носок скважин и максимальная горизонтальная длина, умноженная на два. Интервал между рядами (ColSpacing) можно вычислить как длину перпендикуляра, опущенного на пятку, умноженную на два. Как альтернативный вариант, пользователь может определить свои собственные интервалы между рядами и между столбцами.
На шаге 106 максимальное расстояние ("MaxDist"), максимальное количество рядов (MaxRows) и максимальное количество рядов ("MaxCols") задаются равными: i) расстоянию между двумя углами; ii) (MaxDist/RowSpacing)+2; и iii) (MaxDist/ColSpacing)+2, соответственно. Расстояние между углами представляет собой расстояние между точками (XMin, YMin) и (ХМах, YMax).
На шаге 108 величина приращения для ряда ("rincr") задается как увеличивающаяся между 0 и 1 на фиксированную заранее заданную величину приращения (incr), например, 0,2.
На шаге 110 величина приращения для столбца ("cincr") задается как увеличивающаяся между 0 и 1 на фиксированную заранее заданную величину приращения (incr), например, 0,2. Циклы, представленные шагами 108, 140 и 110, 138, таким образом, используются для поворота позиции исходной точки (Х, Y после поворота на шаге 120) вокруг точки (XCenter, YCenter) в попытке найти оптимальное положение для исходной точки.
На шаге 112 начальная позиция X ("StartingPosX") задается равной ((MaxCols/2)+cincr)·ColSpacing).
На шаге 114 начальная позиция Y ("StartingPosY") задается равной YCenter - ((MaxRows/2)+rincr)·RowSpacing).
На шаге 116 задается увеличение на 1 для ряда ("row") между 0 и максимальным количеством рядов (MaxRows).
На шаге 118 задается увеличение на 1 для столбца ("col") между 0 и максимальным количеством столбцов (MaxCols). Циклы, представленные шагами 116, 134 и 118, 132, таким образом, используются для проведения итерации по нескольким рядам и столбцам, так что местоположение площадки обнаруживается в местоположении каждого ряда и каждого столбца.
На шаге 120 координата X задается равной значению (StartingPosX+(col·ColSpacing), Y задается равной значению (StartingPosY+row·RowSpacing), а X, Y поворачиваются вокруг точки (XCenter, YCenter) на величину азимута (Azimuth). Азимут представляет собой заранее заданный начальный азимут бурения, используемый для поворота X, Y вокруг точки (XCenter, YCenter) в позицию, представленную как новое "Местоположение" (Location).
На шаге 122 способ 100 определяет, находится ли Местоположение в пределах заранее заданной границы, которая может быть границей на поверхности, включая любые препятствия. Если Местоположение находится не в пределах заранее заданной границы, то способ 100 возвращается на шаг 118. Если Местоположение находится в пределах заранее заданной границы, то способ 100 переходит к шагу 123.
На шаге 123 способ 100 определяет, необходим ли проход Местоположения, на основании того, существуют ли какие-либо препятствия, которых нужно избежать, такие как, например, заранее заданная поверхность и подземные препятствия. Если не существует препятствий, которых нужно избежать, то способ 100 переходит к шагу 126. Если существуют препятствия, которых нужно избежать, то способ 100 переходит к шагу 124 для прохода Местоположения.
На шаге 124 выполняется проход Местоположения с использованием хорошо известных в данной области способов, например, «обход» (walk around), раскрытый в патенте США №7200540. Таким образом, после выполнения обхода можно определить новое местоположение, чтобы избежать препятствия (препятствий) или определить «нулевое» местоположение, если путем прохода невозможно найти новое местоположение в пределах заранее заданного максимально допустимого расстояния перемещения. С увеличением количества препятствий, особенно небольших, таких как дороги, трубопроводы, здания и им подобных, возрастает значимость обхода.
На шаге 126 способ 100 определяет, является ли пригодным Местоположение, взятое с шага 120 или 124, с помощью способов, хорошо известных в данной области. Например, пригодным Местоположением может считаться местоположение, расположенное в пределах заранее заданной границы и одновременно свободное от препятствий. Таким образом, на основании этих критериев можно определить пригодное Местоположение путем сравнения Местоположения с одним или более двухмерными полигонами, сравнивая их по цвету, сравнивая со снимком, имеющим привязку к местности и известную раскраску «плохой/хороший», определяя значение и/или уклон по сетке, и т.д Если Местоположение непригодно, то способ 100 переходит на шаг 118. Если Местоположение с шага 124 является «нулевым», то для задач этого пункта оно непригодно. Если Местоположение пригодно, то способ 100 переходит к шагу 128.
На шаге 128 выполняется алгоритм вычисления значения ("Compute Value") для расчета Значения (Value), описание которого дано ниже со ссылкой на фиг. 3.
На шаге 130 Значение (Value) прибавляется к текущему Суммарному Значению (CurrentTotal), а Местоположение (Location) с шага 120 или 124 прибавляется к Текущему Вектору (Current Vector). Текущий Вектор (Current Vector) является рабочим списком Местоположений (Locations), найденных в ходе текущей итерации шага 130. Суммарное Значение (CurrentTotal) является рабочим суммарным значением для Значений (Values) местоположений (Locations) в списке.
На шаге 132 способ 100 возвращается к шагу 118, если переменная col меньше, чем максимальное количество столбцов (MaxCols), и параметр col инкрементируется далее. Если параметр col равен максимальному количеству столбцов (MaxCols), то способ 100 переходит на шаг 134.
На шаге 134 способ 100 возвращается к шагу 116, если параметр row меньше, чем максимальное количество рядов (MaxRows), и параметр row инкрементируется далее. Если параметр row равен максимальному количеству рядов (MaxRows), то способ 100 переходит на шаг 136.
На шаге 136, способ 100 определяет, превышает ли значение CurentTotal максимальное значение (MaxValue), которое равно 0 на первой итерации шага 136. Если значение CurrentTotal не больше, чем максимальное значение (MaxValue), то способ 100 переходит на шаг 138. Если значение CurrentTotal больше, чем максимальное значение (MaxValue), то способ 100 переходит на шаг 137.
На шаге 137 максимальное значение (MaxValue) задается равным значению (CurrentTotal), а вектор MaxVector задается равным вектору CurrentVector. Таким образом, вектор MaxVector представляет наилучшую группу местоположений площадок, найденных на данный момент, а значение MaxValue представляет кумулятивные значения (Values) этих местоположений площадок.
На шаге 138 способ 100 возвращается на шаг 110, если приращение cincr меньше 1, и приращение cincr увеличивается далее. Если приращение cincr равно 1, то способ 100 переходит на шаг 140.
На шаге 140 способ 100 возвращается к шагу 108, если приращение rincr меньше 1, приращение rincr увеличивается далее. Если приращение rincr равно 1, то способ 100 переходит на шаг 142.
На шаге 142 вектор MaxVector возвращается в виде оптимального местоположения (местоположений) площадки, и способ 100 заканчивается.
Обращаясь далее к фиг. 5-6, в заранее заданной зоне на фиг. 4 показаны те же препятствия. На виде 500 сверху на фиг. 5 показаны результаты способа 100 (без шагов 108, 110, 124), которые включают схему местоположения площадок по столбцам и рядам, основанную на одной случайной исходной точке. На виде 600 сверху на фиг. 6 показаны результаты способа 100 (без шага 124), которые включают схему положения площадок по столбцам и рядам, основанную на оптимизированной исходной точке. Схема на фиг. 6 образовала 49 местоположений площадок с использованием оптимизированной исходной точки, что на 17 местоположений площадок больше, чем в схеме на фиг. 5, для создания которой использовалась одна случайная исходная точка. Каждое местоположение площадки изображено в виде сплошного темного квадрата в пределах обозначенного пунктирной линией прямоугольника, представляющего зону расположения горизонтальных скважин, которые будут буриться от местоположений площадок.
Далее, на фиг. 2 изображена диаграмма другого варианта осуществления способа 200 для реализации настоящего изобретения. С помощью способа 200 обычно создается группа местоположений площадок в виде группы рядов, где местоположения в пределах каждого ряда находятся на приблизительно одинаковом расстоянии, но при этом без каких-либо попыток выравнивания по столбцам с предшествующими или последующими рядами.
На шаге 202 вычисляются Х,Y min, max и центральная точка для заранее заданной зоны, представляющей собой предполагаемое месторождение, с помощью технологий, хорошо известных в данной области. Вычисленные значения для (XMin-ХМах, YMin-YMax) представляют диапазон, который можно использовать для определения центральной точки ("XCenter", "YCenter") для заранее заданной зоны путем ((XMin+XMax)÷2, (YMin+YMax)÷2)). Диапазон и центральная точка отражают пределы заранее заданной зоны, где должны расположиться все возможные местоположения площадок. Другими словами, этот шаг служит для вычисления диапазона (XMin-ХМах, YMin-YMax) и центральной точки (XCenter, YCenter), где должны расположиться все возможные местоположеня площадок для заранее заданной зоны.
На шаге 204 вычисляются интервал между рядами ("RowSpacing") и интервал между столбцами ("ColSpacing") с использованием хорошо известных в данной области технологий, размеров скважины и значений интервалов. Например, интервал между рядами (RowSpacing) можно вычислить следующим образом: к интервалу пятка-пятка скважин прибавляется интервал носок-носок скважин и максимальная горизонтальная длина, умноженная на два. Интервал между рядами (ColSpacing) можно вычислить как длину перпендикуляра, опущенного на пятку, умноженную на два.
На шаге 206 максимальное расстояние ("MaxDist"), максимальное количество рядов (MaxRows) и максимальное количество рядов ("MaxCols") задаются равными: i) расстоянию между двумя углами; ii) (MaxDist/RowSpacing)+2; и iii) (MaxDist/ColSpacing)+2, соответственно. Расстояние между углами представляет собой расстояние между точками (XMin, YMin) и (ХМах, YMax).
На шаге 208 величина приращения для ряда ("rincr") задается как увеличивающаяся между 0 и 1 на фиксированную заранее заданную величину приращения (incr), например, 0,2.
На шаге 210 начальная позиция Y ("StartingPosY") задается равной YCenter - ((MaxRows/2)+rincr)·RowSpacing) и начинается (выделяется) новый список CurrentRowList (текущий список рядов).
На шаге 212 для ряда задается увеличение на 1 между 0 и максимальным количеством рядов (MaxRows).
На шаге 214 величина приращения для столбца ("cincr") задается как увеличивающаяся между 0 и 1 на фиксированную заранее заданную величину приращения (incr), например, 0,2.
На шаге 216 начальная позиция X ("StartingPosX") задается равной ((MaxCols/2)+cincr)·ColSpacing), и начинается (выделяется) новый список CurrentColList (текущий список столбцов).
На шаге 218 для столбца ("col") задается увеличение на 1 между 0 и максимальным количеством столбцов (MaxCols).
На шаге 220 координата X задается равной значению (StartingPosX+(col·ColSpacing), Y задается равной значению (StartingPosY+row·RowSpacing), а X, Y поворачиваются вокруг точки (XCenter, YCenter) на величину азимута (Azimuth). Азимут представляет собой заранее заданный начальный азимут бурения, используемый для поворота X, Y вокруг точки (XCenter, YCenter) в позицию, представленную как новое "Местоположение" (Location).
На шаге 222 способ 200 определяет, находится ли Местоположение в пределах заранее заданной границы, которая может быть границей на поверхности, включая любые препятствия. Если Местоположение находится не в пределах заранее заданной границы, то способ 200 возвращается на шаг 218. Если Местоположение находится в пределах заранее заданной границы, то способ 200 переходит к шагу 223.
На шаге 223 способ 200 определяет, необходим ли проход Местоположения, на основании того, существуют ли какие-либо препятствия, которых нужно избежать, такие как, например, заранее заданная поверхность и подземные препятствия. Если не существует препятствий, которых нужно избежать, то способ 200 переходит к шагу 226. Если существуют препятствия, которых нужно избежать, то способ 100 переходит к шагу 224 для прохода Местоположения.
На шаге 224 выполняется проход Местоположения с использованием хорошо известных в данной области способов, например, «обход» (walk around), раскрытый в патенте США №7200540. Таким образом, после выполнения обхода можно определить новое местоположение, чтобы избежать препятствия (препятствий) или определить «нулевое» местоположение, если путем прохода невозможно найти новое местоположение в пределах заранее заданного максимально допустимого расстояния перемещения. С увеличением количества препятствий, особенно небольших, таких как дороги, трубопроводы, здания и им подобных, возрастает значимость обхода.
На шаге 226 способ 200 определяет, является ли пригодным Местоположение, взятое с шага 220 или 224, с помощью способов, хорошо известных в данной области. Например, пригодным Местоположением может считаться местоположение, расположенное в пределах заранее заданной границы и одновременно свободное от препятствий. Таким образом, на основании этих критериев можно определить пригодное Местоположение путем сравнения Местоположения с одним или более двухмерными полигонами, сравнивая их по цвету, сравнивая со снимком, имеющим привязку к местности и известную раскраску «плохой/хороший», определяя значение и/или уклон по сетке, и т.д Если Местоположение непригодно, то способ 200 переходит на шаг 218. Если Местоположение с шага 224 является «нулевым», то для задач этого пункта оно непригодно. Если Местоположение пригодно, то способ 200 переходит к шагу 228.
На шаге 228 выполняется алгоритм вычисления значения ("Compute Value") для расчета Значения (Value), описание которого дано ниже со ссылкой на фиг. 3.
На шаге 230 значение (Value) прибавляется к текущему Суммарному Значению (CurrentTotal), и Местоположение (Location) с шага 220 или 224, добавляется в список CurrentColList. Суммарное Значение (CurrentTotal) является рабочим суммарным значением для Значений в списке CurrentColList.
На шаге 232 способ 200 возвращается к шагу 218, если переменная col меньше, чем максимальное количество столбцов (MaxCols), и параметр col инкрементируется далее. Если параметр col равен максимальному количеству столбцов (MaxCols), то способ 200 переходит на шаг 234.
На шаге 234 лучшее значение столбцов (BestColumnValue) и список лучших столбцов (BestColumnList) записываются из (то есть задаются равными) значения CurrentTotal и списка CurrentColList, соответственно, если значение CurrentTotal больше, чем предыдущее значение BestColumnValue. Таким образом, значение BestColumnValue и список BestColumnList будут инициализированы нулем и пустым списком, соответственно, между шагами 212 и 214. Список BestColumnList и список CurrentColList представляют фактические местоположения площадки (площадок), а значение BestColumnValue и значение CurrentTotal представляют сумму Значений для соответствующих местоположений.
На шаге 236 способ 200 возвращается на шаг 214, если приращение cincr меньше 1, и приращение cincr увеличивается далее. Если приращение cincr равно 1, то способ 200 переходит на шаг 238.
На шаге 238 список BestColumnList прибавляется к списку CurrentRowList, а значение BestColumnValue прибавляется к значению pCurrentRowValue, которое равно 0 во время первой итерации шага 238.
На шаге 240 способ 200 возвращается к шагу 212, если параметр row меньше, чем максимальное количество рядов (MaxRows), и параметр row инкрементируется далее. Если параметр row равен максимальному количеству рядов (MaxRows), то способ 200 переходит на шаг 242.
На шаге 242 лучшее значение рядов (BestRowValue) и список лучших рядов (BestRowList) записываются из (то есть задаются равными) значению CurrentRowValue и списку CurrentRowList, соответственно, если значение CurrentTotal больше предыдущего значения (BestRowValue). Таким образом, значение BestRowValue и список BestRowList будут инициализированы нулем и пустым списком, соответственно, между шагами 212 и 214. Список BestRowList) и список CurrentRowList представляют фактические местоположения площадки (площадок), а значение BestRowValue и значение CurrentRowValue представляют сумму Значений для соответствующих местоположений.
На шаге 244 способ 200 возвращается к шагу 208, если приращение rincr меньше 1, приращение rincr увеличивается далее. Если приращение rincr равно 1, то способ 200 переходит на шаг 246.
На шаге 246 список BestRowList возвращается в виде оптимального местоположения (местоположений) площадок и способ 200 заканчивается.
Обращаясь к фигурам 7-8, в заранее заданной зоне на фиг.4 показаны те же препятствия. На виде 700 сверху на фиг. 7 показаны результаты способа 200 (без шага 224), включающие схему оптимального расположения площадок. На виде 800 сверху, изображенном на фиг. 8, показаны результаты использования способа 200, которые включают еще одну схему оптимального расположения площадок, полученную в результате обхода местоположений площадок, чтобы избежать препятствий. На схеме с фиг. 8 образовано 59 местоположений площадок в результате прохода местоположений на шаге 224, и это на 4 площадки больше, чем на схеме с фиг. 7, которая была составлена без обхода местоположений на шаге 224. Каждое местоположение площадки показано в виде сплошного темного квадрата в пределах обозначенного пунктирной линией прямоугольника, представляющего зону расположения горизонтальных скважин, которые будут буриться от местоположений площадок.
На фиг. 3 изображена диаграмма одного из вариантов осуществления алгоритма вычисления Значения ("Compute Value") для выполнения шагов 128 и 228 на фигурах 1 и 2, соответственно. С помощью способа 300 вычисляется значение для местоположения площадки на основании того, каким образом окружающая зона может быть дренирована горизонтальными скважинами, бурение которых будет осуществляться с этой площадки с использованием текущих ограничивающих проектных факторов. Для присвоения значения местоположению площадки могут быть использованы и другие хорошо известные в данной области техники способы.
На шаге 304 восемь заранее заданных местоположений корректируются для Местоположения с шага 120 или 224, а Значение (Value) задается равным 0. 8 заранее заданных местоположений включают 4 местоположения, расположенные на максимальном расстоянии в каждом направлении вдоль начального азимута бурения из местоположения площадки (0, 0), и четыре местоположения на минимальном расстоянии в каждом направлении вдоль начального азимута бурения из местоположения площадки (0, 0). Максимальное расстояние предполагает, что латеральная скважина имеет пятку на максимальном расстоянии досягаемости, и длина латеральной скважины является максимальной длиной латеральной скважины. Минимальное расстояние предполагает, что латеральная скважина имеет пятку на расстоянии, равном половине расстояния максимальной досягаемости, и длина латеральной скважины является минимальной длиной латеральной скважины. Эти 8 заранее заданных местоположений можно корректировать путем сдвига каждого местоположения из местоположения площадки с координатами (0, 0) в предлагаемое местоположение площадки, добавляя Местоположение с шагов 120 или 224 к каждому заранее заданному местоположению.
На шаге 306 способ 300 выбирает откорректированное местоположение для шагов 308-310. Способ 300 может выбирать откорректированное местоположение случайным образом или с использованием какого-либо другого заранее заданного критерия.
На шаге 308 способ 300 определяет, находится ли откорректированное местоположение в пригодной целевой позиции. Пригодная целевая позиция, например, может являться позицией в пределах наземных или подземных границ, свободной от каких-либо препятствий. Если откорректированное местоположение не находится в пригодной целевой позиции, то способ 300 возвращается на шаг 306. Если откорректированное местоположение находится в пригодной целевой позиции, то способ 300 переходит на шаг 310.
На шаге 310 Значение задается равным Значению +0,1. Величина 0,1 прибавляется для каждого откорректированного местоположения, находящегося в пригодной целевой позиции и, если все восемь откорректированных местоположений находятся в пригодных целевых позициях, то Значение на шаге 316 задается равным 1,0, чтобы отразить обстоятельство, что одна площадка со 100% эффективностью является более ценной, чем 2 площадки с 50% эффективностью каждая.
На шаге 312 способ 300 определяет, имеются ли дополнительные откорректированные местоположения с шага 304. Если дополнительные откорректированные местоположения имеются, способ 300 возвращается на шаг 306 для выбора другого откорректированного местоположения. Если дополнительных откорректированных местоположений нет, то способ 300 переходит на шаг 314.
На шаге 314 способ 300 определяет, превышает ли суммарное Значение (Value) с шага 310 величину 0,75. Если Значение не больше, чем 0,75, то способ 300 переходит на шаг 318. Если Значение больше, чем 0,75, то способ 300 переходит на шаг 316.
На шаге 316 Значение устанавливается равным суммарному Значению с шага 310+0,2
На шаге 318 делитель перемещения (MoveDivisor) задается равным (Max(RowSpacing, ColSpacing)). Иначе говоря, параметр MoveDivisor задается равным набольшему значению из чисал интервалов RowSpacing и ColSpacing.
На шаге 320 Значение (Value) задается равным (Value - (MoveDistance/MoveDivisor)), где расстояние перемещения (MoveDistance) является расстоянием, на которое Местоположение было перемещено на шагах 124 или 224.
На шаге 322 способ 300 определяет, меньше ли Значение (Value) минимального значения (MinimumValue). Если Значение не меньше значения MinimumValue, то способ 300 переходит на шаг 326. Если Значение меньше значения MinimumValue, то способ 300 переходит на шаг 324. Значение Minimum Value является заранее заданной величиной, поэтому, если местоположение площадки не удовлетворяет этому значению, то его не следует включать в программу разработки месторождения.
На шаге 324 Значение задается равным 0.
На шаге 326 Значение с шагов 320 или 324 возвращается на шаги 128 или 228.
Описание системы
Настоящее изобретение можно реализовать посредством выполняемой компьютером программы, состоящей из инструкций, такой как программные модули, которые обычно называют программными приложениями или прикладными программами, выполняющимися компьютером. В состав программного обеспечения могут входить, например, процедуры, программы, объекты, компоненты и структуры данных, которые выполняют конкретные задачи или реализуют конкретные абстрактные типы данных. Программное обеспечение создает интерфейс, который позволяет компьютеру реагировать в соответствии с источником ввода. AssetPlanner и/или TracPlanner™, которые являются коммерческими программными приложениями, поставляемыми на рынок компанией Landmark Graphics Corporation, можно использовать в качестве интерфейсных приложений для реализации настоящего изобретения. Программное обеспечение может работать совместно с другими сегментами кода, чтобы запускать различные задачи в ответ на данные, принятые от источника принятых данных. Программное обеспечение может быть сохранено и/или храниться на любых носителях памяти, таких как компьютерный компакт диск (CD-ROM), магнитный диск, память на магнитных доменах и полупроводниковое запоминающее устройство (например, различные типы ОЗУ (RAM) или ПЗУ (ROM)). Также, программное обеспечение и результаты его работы могут быть переданы по различным средствам передачи данных, таким как оптоволоконный кабель, металлический кабель, свободное пространство и/или через любые из различных типов сети, например, Интернет.
Более того, специалистам в данной области будет ясно, что изобретение можно применять с использованием различных конфигураций компьютерных систем, включая портативные устройства, мультипроцессорные системы, микропроцессорную или программируемую бытовую электронику, миникомпьютеры, мэйнфреймы, и т.п. Любое количество компьютерных систем и компьютерных сетей может использоваться для настоящего изобретения. Изобретение можно использовать в средах распределенных вычислений, где задачи выполняются удаленными обрабатывающими устройствами, соединенными через сеть связи. В среде распределенных вычислений программные модули могут быть расположены как в локальном, так и в удаленном компьютерном носителе информации, включая устройства памяти. Настоящее устройство, таким образом, может быть реализовано на различных аппаратных средствах, программном обеспечении или их комбинации в компьютерной системе или в иной обрабатывающей системе.
На фиг. 9 изображена блок-диаграмма системы для реализации настоящего изобретения на компьютере. Система содержит вычислительный модуль, который иногда называют вычислительной системой, содержащий память, прикладные программы, базу данных, средства просмотра, файлы ASCII, клиентский интерфейс, видеоинтерфейс и модуль обработки. Вычислительный модуль представляет собой лишь только один из примеров подходящей вычислительной среды, и не может служить для каких-либо ограничений на объем использования или функциональность изобретения.
Память, главным образом, хранит прикладные программы, которые также можно назвать программными модулями, содержащими выполняемые компьютером инструкции, выполняемые вычислительным модулем для реализации настоящего изобретения, раскрытого в этом документе и изображенного на фиг. 1-8. Таким образом, память включает приложение OpenWorks™, которое можно использовать как базу данных для предоставления данных и/или сохранения результатов в виде данных. Для предоставления данных и/или сохранения результатов в виде данных можно также использовать файлы ASCII. Память также включает приложение DecisionSpaceDesktop™, которое можно использовать как средство просмотра для отображения данных и результатов в виде данных. Модуль позиционирования площадки в Asset Planner™ можно использовать для взаимодействия с TracPlanner™ для определения оптимального положения каждой площадки. Хотя AssetPlanner™ может использоваться вместе с TracPlanner™ для определения оптимального положения каждой площадки, вместо него можно использовать другие интерфейсные приложения, или же модуль позиционирования площадки может использоваться как автономное приложение. DecisionSpaceDesktop™ и OpenWorks™ являются коммерческими программными приложениями, продаваемыми компанией Landmark Graphics Corporation.
Хотя вычислительный модуль показан как имеющий память общего назначения, вычислительный модуль обычно включает разные машиночитаемые носителей. В качестве примера, но не ограничения, машиночитаемые носители могут включать компьютерные носители информации и средства связи. Память вычислительной системы может включать компьютерные носители информации в виде энергозависимой (кратковременной) и/или энергонезависимой (долговременной) памяти, такой как постоянное запоминающее устройство ПЗУ(Р:ОМ)/оперативное запоминающее устройство ОЗУ (RAM). Базовая система ввода/вывода (BIOS), содержащая базовые процедуры, которые помогают передавать информацию между элементами внутри вычислительного модуля, например, во время запуска, обычно хранится в ПЗУ (ROM). ОЗУ (RAM) обычно содержит данные и/или программные модули, к которым есть непосредственный доступ и/или которые в настоящее время используются модулем обработки. В качестве примера, но не ограничения, вычислительный модуль включает операционную систему, прикладные программы, другие программные модули и данные программ.
Компоненты, показанные в памяти, могут также содержаться в других извлекаемых/неизвлекаемых энергозависимых/энергонезависимых компьютерных носителях информации, или они могут быть воплощены в вычислительном модуле с использованием прикладного программного интерфейса (API) или средств облачных вычислений, которые могут находиться в отдельном вычислительном модуле, соединенном через компьютерную систему или сеть. Исключительно в качестве примера, жесткий диск может считывать или записывать данные на неизвлекаемые энергонезависимые магнитные носители, накопитель на магнитных дисках может считывать или записывать данные на извлекаемые энергонезависимые магнитные диски, а накопитель на оптических дисках может считывать или записывать данные на извлекаемые энергонезависимые оптические диски, такие как CD ROM или другие оптические носители. Другие извлекаемые/неизвлекаемые энергозависимые/энергонезависимые компьютерные носители информации, которые могут использоваться в приводимой в качестве примера операционной среде, могут включать, не ограничиваясь этим, кассеты с магнитной лентой, карты флэш-памяти, различные цифровые диски, цифровую видео ленту, полупроводниковые устройства ОЗУ (RAM), полупроводниковые устройства ПЗУ (ROM), и т.п. Вышеупомянутые диски и связанные с ними компьютерные носители информации обеспечивают хранение считываемых компьютером инструкций, структур данных, программных модулей и других данных для вычислительного модуля.
Клиент может вводить команды и информацию в вычислительный модуль через клиентский интерфейс, которым могут служить устройства ввода, такие как клавиатура и устройство указания, обычно называемое мышью, трекбол, сенсорная панель (тачпэд). Устройства ввода могут включать микрофон, джойстик, спутниковую тарелку, сканер и т.п. Эти и другие устройства ввода часто соединяются с модулем обработки через клиентский интерфейс, который соединен с системной шиной, но могут соединяться и с помощью другого интерфейса и шинных конструкций, таких как параллельный порт или универсальная последовательная шина (USB).
Монитор или другой тип устройства отображения может быть соединен с системной шиной через интерфейс, такой как видеоинтерфейс. Графический пользовательский интерфейс (GUI) можно тоже использовать с видеоинтерфейсом для приема инструкций от клиентского интерфейса и передачи инструкций в модуль обработки. Дополнительно к монитору, компьютеры могут также включать другие периферийные устройства вывода, такие как колонки и принтер, которые могут быть подсоединены через периферийный интерфейс вывода.
Несмотря на то, что не были показаны многие другие внутренние компоненты вычислительного модуля, специалистам в данной области должно быть ясно, что такие компоненты и их соединения между собой хорошо известны.
Хотя настоящее изобретение было раскрыто в отношении предпочтительных в настоящее время вариантов осуществления, специалистам в данной области будет ясно, что ограничение изобретения этими вариантами осуществления не предполагается. Так как системы и способы, раскрытые в этом документе, могут быть использованы для выборочного и автоматического позиционирования платформ различного типа, они могут оказаться особенно полезными для позиционирования площадок под буровые установки, вышки мобильной связи, линии электропередачи, дома, нефтяные и газовые вышки и т.п. Поэтому следует понимать, что различные альтернативные варианты осуществления и модификации могут быть выполнены в отношении описанных вариантов осуществления без отклонения от сущности и объема охраны изобретения, определяемых прилагаемой формулой изобретения и ее эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И КОМПЬЮТЕРНАЯ СИСТЕМА ДЛЯ ПРОЕКТИРОВАНИЯ РАЗМЕЩЕНИЯ КУСТОВЫХ ПЛОЩАДОК НА МЕСТОРОЖДЕНИИ | 2017 |
|
RU2685005C1 |
| СПОСОБ ПОСТРОЕНИЯ СЕЙСМИЧЕСКОГО ГЛУБИННОГО И/ИЛИ ВРЕМЕННОГО РАЗРЕЗА "КОНГ-МАКРО" (ВАРИАНТЫ) | 2010 |
|
RU2445651C2 |
| СПОСОБ ПОСТРОЕНИЯ СЕЙСМИЧЕСКОГО ГЛУБИННОГО РАЗРЕЗА | 2009 |
|
RU2415449C1 |
| СПОСОБ ПРОЕКТИРОВАНИЯ ПОВЕРХНОСТНОГО ОБУСТРОЙСТВА МЕСТОРОЖДЕНИЯ | 2017 |
|
RU2684501C1 |
| СПОСОБ ПОЛУЧЕНИЯ АПРИОРНОГО ГОДОГРАФА ДЛЯ ВЫПОЛНЕНИЯ ЛИТОЛОГО-СТРАТИГРАФИЧЕСКОЙ ПРИВЯЗКИ | 2013 |
|
RU2541091C1 |
| СПОСОБ ПОСТРОЕНИЯ СЕЙСМИЧЕСКОГО ГЛУБИННОГО РАЗРЕЗА | 2010 |
|
RU2449322C1 |
| ПРЯМЫЕ МОДЕЛИ ДЛЯ АНАЛИЗА ПОДЗЕМНЫХ ФОРМАЦИЙ С ПОМОЩЬЮ ИЗМЕРЕНИЯ ГАММА-ИЗЛУЧЕНИЯ | 2009 |
|
RU2464593C1 |
| ИНСТРУМЕНТ ДЛЯ СЪЕМКИ ПЛАНА БУРЕНИЯ ДЛЯ ТОПОГРАФИЧЕСКОЙ СЪЕМКИ, СИСТЕМА И СВЯЗАННЫЕ С НИМ СПОСОБЫ | 2020 |
|
RU2805584C2 |
| СПОСОБ И СИСТЕМА БУРЕНИЯ С АВТОМАТИЧЕСКИМ УТОЧНЕНИЕМ ТОЧЕК МАРШРУТА ИЛИ ТРАССЫ СТВОЛА СКВАЖИНЫ НА ОСНОВАНИИ КОРРЕКТИРОВКИ ДАННЫХ ИНКЛИНОМЕТРИИ | 2014 |
|
RU2657033C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ОБЛАСТИ ИЗОБРАЖЕНИЯ | 2015 |
|
RU2642404C2 |
Группа изобретений относится к позиционированию площадок - платформ под буровую установку для разработки месторождения горизонтальными скважинами с учетом предопределенных границ и наземных и/или подземных препятствий. Технический результат - повышение степени оптимизации позиционирования упомянутых площадок - объектов. По способу осуществляют следующее: а) определяют максимальное количество рядов объектов на основании интервала между рядами и максимального расстояния между ними; б) определяют максимальное количество столбцов на основании интервала между столбцами и максимального расстояния между объектами; с) определяют местоположение исходной точки - объекта в пределах заранее заданной границы в начальной позиции каждого ряда и в начальной позиции каждого столбца, при этом местоположение каждой исходной точки присваивают группе местоположений исходной точки; d) вычисляют суммарное значение для группы местоположений исходной точки - объекта с использованием компьютерного процессора; е) корректируют начальную позицию в каждом ряду на величину приращения для ряда и начальной позиции в каждом столбце на величину приращения для столбца. Повторяют шаги с)-е) для заранее заданного количества начальных позиций в каждом ряду и заранее заданного количества начальных позиций в каждом столбце и позиционируют площадки под буровую установку в каждом местоположении на основании местоположения соответствующей исходной точки в группе местоположений исходной точки, имеющей наилучшее суммарное значение. 2 н. и 18 з.п. ф-лы, 9 ил.
1. Способ позиционирования множества площадок под буровые установки в пределах заранее заданной границы, включающий:
a) определение максимального количества рядов на основании интервала между рядами и максимального расстояния;
b) определение максимального количества столбцов на основании интервала между столбцами и максимального расстояния;
c) определение местоположения исходной точки в пределах заранее заданной границы в начальной позиции каждого ряда и в начальной позиции каждого столбца, при этом местоположение каждой исходной точки принадлежит группе местоположений исходной точки;
d) вычисление суммарного значения для группы местоположений исходной точки с использованием компьютерного процессора;
e) корректировку начальной позиции в каждом ряду на величину приращения для ряда и начальной позиции в каждом столбце на величину приращения для столбца;
f) повторение шагов с)-е) для заранее заданного количества начальных позиций в каждом ряду и заранее заданного количества начальных позиций в каждом столбце; и
g) позиционирование площадки под буровую установку в каждом местоположении на основании местоположения соответствующей исходной точки в группе местоположений исходной точки, имеющей наилучшее суммарное значение.
2. Способ по п. 1, отличающийся тем, что местоположение каждой исходной точки представлено координатами х, у.
3. Способ по п. 2, отличающийся тем, что дополнительно включает вычисление значения для каждого местоположения исходной точки в группе местоположений исходной точки.
4. Способ по п. 3, отличающийся тем, что суммарное значение для группы местоположений исходной точки представлено в виде суммы значений для каждого местоположения исходной точки в каждых соответствующих координатах х, у.
5. Способ по п. 3, отличающийся тем, что суммарное значение для группы местоположений исходной точки представлено в виде суммы значений для каждого местоположения исходной точки в каждой соответствующей координате у для каждого ряда и каждого столбца и в каждой соответствующей координате х для каждого ряда.
6. Способ по п. 2, отличающийся тем, что наибольшее суммарное значение для группы местоположений исходной точки представлено в виде наибольшего суммарного значения для группы местоположений исходной очки с одинаковыми координатами х, у для каждого ряда и для каждого столбца.
7. Способ по п. 2, отличающийся тем, что наибольшее суммарное значение для группы местоположений исходной точки представлено в виде наибольшего суммарного значения для группы местоположений исходной точки с одинаковой координатой у для каждого ряда и разной координатой х для каждого ряда.
8. Способ по п. 1, отличающийся тем, что дополнительно включает проход каждого местоположения исходной точки в пределах заранее заданной границы, чтобы избежать каких-либо препятствий.
9. Способ по п. 1, отличающийся тем, что дополнительно включает подтверждение того, что каждое местоположение исходной точки в пределах заранее заданной границы свободно от каких-либо препятствий.
10. Способ по п. 1, отличающийся тем, что дополнительно включает инициализацию ряда и величины приращения для ряда и инициализацию столбца и величины приращения для столбца.
11. Носитель программной информации, выполненный с возможностью размещения на нем выполняемых компьютером инструкций для позиционирования множества площадок под буровые установки в пределах заранее заданной границы, при этом при выполнении инструкций осуществляется:
a) определение максимального количества рядов на основании интервала между рядами и максимального расстояния;
b) определение максимального количества столбцов на основании интервала между столбцами и максимального расстояния;
c) определение местоположения исходной точки в пределах заранее заданной границы в начальной позиции каждого ряда и в начальной позиции каждого столбца, при этом местоположение каждой исходной точки принадлежит группе местоположений исходной точки;
d) вычисление суммарного значения для группы местоположений исходной точки;
e) корректировка начальной позиции в каждом ряду на величину приращения для ряда и начальной позиции в каждом столбце на величину приращения для столбца;
f) повторение шагов с)-е) для заранее заданного количества начальных позиций в каждом ряду и для заранее заданного количества начальных позиций в каждом столбце; и
g) позиционирование площадки под буровую установку в каждом местоположении на основании местоположения соответствующей исходной точки в группе местоположений исходной точки, имеющей наилучшее суммарное значение.
12. Носитель информации по п. 11, отличающийся тем, что местоположение каждой исходной точки представлено координатами х, у.
13. Носитель информации по п. 12, отличающийся тем, что дополнительно включает вычисление значения для каждого местоположения исходной точки в группе местоположений исходной точки.
14. Носитель информации по п. 13, отличающийся тем, что суммарное значение для группы местоположений исходной точки представлено в виде суммы значений для каждого местоположения исходной точки в каждых соответствующих координатах х, у.
15. Носитель информации по п. 13, отличающийся тем, что суммарное значение для группы местоположений исходной точки представлено в виде суммы значений для каждого местоположения исходной точки в каждой соответствующей координате у для каждого ряда и каждого столбца и в каждой соответствующей координате х для каждого ряда.
16. Носитель информации по п. 12, отличающийся тем, что наибольшее суммарное значение для группы местоположений исходной точки представлено в виде наибольшего суммарного значения для группы местоположений исходной очки с одинаковыми координатами х, у для каждого ряда и для каждого столбца.
17. Носитель информации по п. 12, отличающийся тем, что наибольшее суммарное значение для группы местоположений исходной точки представлено в виде наибольшего суммарного значения для группы местоположений исходной точки с одинаковой координатой у для каждого ряда и разной координатой х для каждого ряда.
18. Носитель информации по п. 11, отличающийся тем, что дополнительно включает проход каждого местоположения исходной точки в пределах заранее заданной границы, чтобы избежать каких-либо препятствий.
19. Носитель информации по п. 11, отличающийся тем, что дополнительно включает подтверждение того, что каждое местоположение исходной точки в пределах заранее заданной границы свободно от каких-либо препятствий.
20. Носитель информации по п. 11, отличающийся тем, что дополнительно включает инициализацию ряда и величины приращения для ряда и инициализацию столбца и величины приращения для столбца.
| US 6549879 B1, 15.04.2003 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| СПОСОБ РАЗРАБОТКИ НЕФТЯНОГО МЕСТОРОЖДЕНИЯ | 2000 |
|
RU2175381C2 |
| СПОСОБ РАЗРАБОТКИ НЕФТЯНОГО МЕСТОРОЖДЕНИЯ | 1995 |
|
RU2087687C1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

