Перекрестная ссылка на родственную заявку
По данной заявке испрашивается приоритет на основе предварительной заявки на патент США № 16/520,182, поданной 23 июля 2019 года, который включен в настоящий документ путем ссылки.
Область техники, к которой относится изобретение
Настоящая заявка относится, в общем, к области съемки плана бурения в системе горизонтального направленного бурения (HDD, ГНБ) и, в частности, к инструменту для съемки плана или измерительному прибору для топографической съемки в реальном времени и связанным с ними способам.
Уровень техники
Современный подход к планированию работ по бурению в горизонтальном направлении включает в себя создание плана подземного ствола скважины до начала программы бурения. Создание плана ствола скважины может быть выполнено путем обхода предложенного пути ствола скважины перед началом бурения с использованием или без использования имеющегося в продаже программного обеспечения для съемки плана ствола скважины, или в некоторых случаях план ствола скважины формируется удаленно, без особого просмотра рабочей площадки, не выходя из рабочего места, не выходя из офиса. Однако заявители отметили, что значительное большинство проектов HDD осуществляется без плана ствола скважины. Такие факторы, как стоимость с точки зрения времени и ресурсов, связанных с формированием плана ствола скважины перед бурением, являются сдерживающими факторами для дальнейшей съемки плана ствола скважины. Возможно, наиболее важным является то, что заявители обнаружили, что многие подрядчики по проведению буровых работ считают, что препятствия, инженерные коммуникации, различия в местности или ландшафте от ожидаемых и другие подобные факторы требуют от бурильщиков отклонения от плана ствола скважины, что делает план ствола скважины устаревшим или спорным. Например, наличие неизвестной подземной коммуникации или другого подземного препятствия может быть определено по прибытии буровой бригады на рабочий участок или после начала бурения, так что план ствола скважины быстро устаревает (возможно, даже до начала бурения).
Кроме того, особенно там, где местность является холмистой, наклонной, включает в себя впадины или, как правило, является неровной, составление точного и пригодного плана ствола скважины может потребовать профессиональной топографической съемки поверхности в области бурения перед операцией бурения. Показания глубины и цели могут оказаться не столь полезными, если их использовать без учета изменений в топографической съемке. К сожалению, стоимость такой профессиональной съемки может быть значительной, и профессиональная съемка требует дополнительного времени и может быть затруднительной для организации, что сдерживает подрядчиков от принятия этого шага или от подготовки плана бурения вообще. Заявители признают, что чрезвычайно трудно попытаться выполнить трассу бурения без подробной топографической съемки поверхности на неровной местности из-за быстрых изменений глубины по ходу трассы бурения.
Глобальная навигационная спутниковая система (GNSS), включая GPS, является потенциальной альтернативой профессиональной съемке для измерения рельефа. Однако до настоящего времени решения GNSS не применялись для измерения рельефа на рабочих площадках HDD. Применимые решения GNSS исторически не обеспечивали требуемый уровень точности по цене, которая является приемлемой для приложений HDD, но технология GNSS продолжает развиваться в этом отношении. В частности, из-за мест, где выполняется HDD, приемники GNSS не всегда могут считывать достаточное количество спутников GNSS для постоянного получения показаний GNSS на рабочих площадках HDD из-за высотных зданий, плотной облачности, деревьев и других препятствий.
Один подход, используемый в предшествующем уровне техники при попытке решить проблему заблаговременного составления плана ствола скважины, описан в совместном патенте США № 6,035,951 с использованием так называемого инструмента 550 для картографирования, показанного на фиг.14. К сожалению, этот инструмент для картографирования нельзя использовать в одиночку, и вместо этого он должен использоваться как часть общей системы с отдельными наземными приемниками, которые принимают дипольный сигнал 580, который передается инструментом для картографирования. Некоторые основные недостатки этого инструмента для картографирования включают в себя: (1) время и ресурсы, необходимые для настройки системы, в частности, для того, чтобы приемники могли определить позицию инструмента для картографирования, и (2) этот инструмент для картографирования предназначен для создания планов ствола скважины перед бурением и не предназначены (и трудны в использовании) для целей навигации по стволу скважины в реальном времени или для изменения предыдущего плана ствола скважины. Аналогичным образом, в патенте США № 6,749,029 описан способ заблаговременного составления плана ствола скважины, который включает в себя традиционный способ создания плана ствола скважины от входа до выхода, охватывая весь путь ствола скважины перед бурением. Этот подход также сопряжен с такими же затратами с точки зрения времени и ресурсов на предварительную настройку и страдает от осложнений, когда во время сооружения ствола скважины возникают факторы, требующие отклонения пути ствола скважины от первоначального.
Заявители признают, что существует потребность в инструменте, который помогает направлять бурильщиков вокруг препятствий и/или к желаемым целевым точкам во время бурения в реальном времени, динамически, на лету, без первоначальных затрат с точки зрения времени и ресурсов, которые в настоящее время требуются для традиционных инструментов и способов съемки плана бурения. Заявители дополнительно признают необходимость в таком инструменте, который также является достаточно продвинутым, чтобы учитывать неровный, сложный рельеф местности, и который учитывает это при указании направления бурения без необходимости профессионального исследования района бурения. Заявители также признают необходимость в такой системе, которая принимала бы данные GNSS, когда такие данные доступны, но по-прежнему могла бы вырабатывать топографические данные, когда данные GNSS недоступны, чтобы инструмент можно было постоянно использовать на строительных площадках HDD, даже при наличии препятствий, которые блокируют доступ к данным GNSS.
Изложенные выше примеры из предшествующего уровня техники и ограничения, связанные с ними, предполагаются иллюстративными и не исключительными. Другие ограничения из предшествующего уровня техники станут понятными для специалистов в данной области техники после прочтения описания и изучения чертежей.
Сущность изобретения
Приводимые ниже варианты осуществления и аспекты их описываются и показываются применительно к системам, инструментам и способам, которые предполагаются примерными и иллюстративными, не ограничивающими объем. В различных вариантах осуществления одна или несколько описанных выше проблем могут быть ослаблены или исключены, тогда как другие варианты осуществления направлены на другие усовершенствования.
В одном аспекте раскрытия описан инструмент для съемки плана и связанный с ним способ для съемки плана для перемещения бурового инструмента во время операции подземного бурения, при этом буровой инструмент образует часть системы горизонтального направленного бурения, в которой буровой инструмент продвигает бурильный инструмент через породу с помощью бурильной колонны, которая продолжается от буровой установки до бурового инструмента. В одном варианте осуществления инструмент для съемки плана включает в себя одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором, причем путь по меньшей мере включает в себя (1) начальную позицию, расположенную на поверхности рядом с текущей позицией бурового инструмента, причем буровой инструмент находится в текущей ориентации и (2) следующую позицию на поверхности рядом с заданным пользователем целевой позицией для бурового инструмента, которая находится впереди относительно текущей позиции. Энкодер вырабатывает выходной сигнал энкодера в ответ на качение одного из колес между начальной позицией на поверхности и следующей позицией на поверхности. Акселерометр включает в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время качения колес вдоль пути, который характеризует ориентацию по тангажу инструмента для съемки плана. Процессор принимает пользовательский ввод, который указывает целевую позицию перед буровым инструментом, причем буровой инструмент расположен в текущей позиции и текущей ориентации, и вырабатывает указание направления для бурового инструмента, чтобы достичь целевой позиции на основе текущей позиции, текущей ориентации, выходного сигнала энкодера и выходного сигнала акселерометра.
В другом варианте осуществления, включающем в себя связанный способ, инструмент для съемки плана образует часть системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу с использованием бурильной колонны, которая продолжается от буровой установки до бурового инструмента. Инструмент для съемки плана включает в себя одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором. Энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес. Акселерометр включает в себя по меньшей мере одну измерительную ось для выработки выходного сигнала акселерометра во время качения колес, который характеризует ориентацию по тангажу инструмента для съемки плана. На основе выходного сигнала энкодера и выходного сигнала акселерометра процессор вырабатывает подземный план для бурового инструмента под поверхностью земли в зависимости от пути.
В другом аспекте раскрытия описываются система и связанный с ней способ для горизонтального направленного бурения. Вариант осуществления системы включает в себя буровой инструмент для формирования ствола скважины и буровую установку для перемещения бурового инструмента. Инструмент для съемки плана включает в себя одно или несколько колес для качения по поверхности земли в ответ на перемещение оператором по пути, энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес, акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала энкодера и выходного сигнала акселерометра акселерометра во время упомянутого качения колес вдоль пути, который характеризует ориентацию по тангажу инструмента для съемки плана, и процессор для выработки подземного плана для бурового инструмента под поверхностью земли относительно пути на основе выходного сигнала энкодера и выходного сигнала акселерометра.
В еще одном аспекте раскрытия, включающем в себя связанный с инструментом способ, инструмент для съемки плана образует часть системы для горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу в прямом направлении, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента. Вариант осуществления инструмента для съемки плана включает в себя одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором. Энкодер вырабатывает выходной сигнал энкодера в ответ на качение одного из колес. Акселерометр включает в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана. Пользовательский интерфейс принимает ввод оператора, назначающий одну или несколько позиций вдоль пути, и процессор для выработки подземного плана для бурового инструмента под поверхностью земли по отношению к упомянутому пути на основе выходного сигнала энкодера, выходного сигнала акселерометра и обозначенных позиций. В другом варианте осуществления и связанном с ним способе инструмент для съемки плана образует часть системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент в прямом направлении через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента. Вариант осуществления включает в себя одно или несколько колес для качения по поверхности земли вдоль пути в обратном направлении, противоположном прямому направлению, начиная с заданной позиции и в ответ на перемещение, осуществляемое оператором. Энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес в обратном направлении. Акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения в обратном направлении, который характеризует ориентацию по тангажу инструмента для съемки плана, и процессор для выработки позиции отступа для буровой установки вдоль пути в обратном направлении относительно заданной позиции на основе контура поверхности пути в обратном направлении, который характеризуется выходным сигналом энкодера и выходным сигналом акселерометра.
В еще одном варианте осуществления и связанном с ним способе инструмент для съемки плана образует часть системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу с использованием бурильной колонны, которая продолжается от буровой установки до бурового инструмента. Инструмент для съемки плана включает в себя одно или несколько колес для качения по поверхности земли по пути в ответ на действия оператора. Кодер вырабатывает выходной сигнал энкодера в ответ на качение по меньшей мере одного из колес. Акселерометр включает в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время качения, который характеризует ориентацию по тангажу инструмента для съемки плана, и выходной сигнал акселерометра также включает в себя одну или несколько ошибок тангажа в ответ на ускорения, вызванные оператором, которые возникают в результате одного или нескольких изменений скорости инструмента для съемки плана при перемещении оператором. Процессор выполнен с возможностью обнаружения изменений скорости на основе выходного сигнала энкодера и применения компенсации к выходному сигналу акселерометра на основе обнаруженных изменений для выработки скомпенсированной ориентации по тангажу по существу с удаленными ошибками по тангажу.
В еще одном варианте осуществления и связанном с ним способе инструмент для съемки плана образует часть системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу с использованием бурильной колонны, которая продолжается от буровой установки до бурового инструмента. Инструмент для съемки плана включает в себя одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором. Энкодер вырабатывает выходной сигнал энкодера в ответ на качение одного из колес. Акселерометр включает в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время качения колес, который характеризует ориентацию по тангажу инструмента для съемки плана, и процессор вырабатывает (1) указание оператору, когда скорость качения превышает пороговую скорость, чтобы порекомендовать оператору снизить скорость, тем самым поддерживая контакт между колесами и поверхностью земли, и (2) контур поверхности пути в вертикальной плоскости на основе выходного сигнала энкодера и выходного сигнала акселерометра.
В дополнительном варианте осуществления и связанном с ним способе инструмент для съемки плана образует часть системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу с использованием бурильной колонны, которая продолжается от буровой установки до бурового инструмента. Инструмент для съемки плана включает в себя колесо для качения по поверхности земли по пути в ответ на перемещение, осуществляемое оператором. Энкодер вырабатывает выходной сигнал энкодера в ответ на качение колеса. Акселерометр включает в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время качения, который характеризует ориентацию по тангажу инструмента для съемки плана, причем выходной сигнал акселерометра показывает чувствительный к температуре дрейф. Печь принимает акселерометр для поддержания акселерометра по меньшей мере при приблизительно постоянной температуре, чтобы существенно уменьшить чувствительный к температуре дрейф во время качения, и процессор вырабатывает контур поверхности пути по меньшей мере в вертикальной плоскости на основе выходного сигнала энкодера и выходного сигнала акселерометра.
В другом варианте осуществления и связанном с ним способе инструмент для съемки плана образует часть системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу с использованием бурильной колонны, которая продолжается от буровой установки до бурового инструмента. Инструмент для съемки плана включает в себя колесо для качения по поверхности земли по пути в ответ на перемещение, осуществляемое оператором, причем путь включает в себя начальную позицию и конечную позицию. Энкодер вырабатывает выходной сигнал энкодера в ответ на качение колеса. Акселерометр включает в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время качения, который характеризует ориентацию по тангажу инструмента для съемки плана, и выходной сигнал акселерометра подвержен фиксированному смещению, которое вносит в выходной сигнал акселерометра ошибку измерения ориентации по тангажу, и процессор записывает исходящий набор данных, включая множество исходящих показаний энкодера, проиндексированных по множеству исходящих показаний акселерометра в ответ на качение инструмента для съемки плана от начальной позиции до конечной позиции и для записи входящего набора данных, включающих в себя множество входящих показаний энкодера, проиндексированных по множеству входящих показаний акселерометра в ответ на качение инструмента для съемки плана в обратном направлении от начальной позиции до конечной позиции, и для объединения исходящего набора данных с входящим набором данных для выработки контура поверхности по меньшей мере в вертикальной плоскости между начальной позицией и конечной позицией способом, который по меньшей мере существенно устраняет ошибку измерения ориентации по тангажу в выходном сигнале акселерометра.
В другом варианте осуществления описан способ использования в системе горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу с использованием бурильной колонны, которая продолжается от буровой установки до бурового инструмента, способ включает в себя поворот инструмента для съемки плана в исходящем направлении от начальной позиции до конечной позиции при считывании выходного сигнала акселерометра акселерометра, который образует часть инструмента для съемки плана, для получения характеристик его ориентации по тангажу в качестве сбора исходящего набора данных, причем выходной сигнал акселерометра подвержен ошибке измерения ориентации по тангажу из-за фиксированной погрешности измерения акселерометра. Инструмент для съемки плана катят во входящем направлении от начальной позиции до конечной позиции в обратном направлении, при этом считывая выходной сигнал акселерометра, чтобы определить его ориентацию по тангажу, чтобы собрать входящий набор данных с помощью выходного сигнала акселерометра с учетом ошибки измерения ориентации по тангажу из-за фиксированной погрешности измерения для объединения исходящего набора данных с входящим набором данных таким образом, чтобы устранить фиксированную погрешность измерения при выработке контура поверхности между начальной позицией и конечной позицией.
В другом варианте осуществления и связанном с ним способе инструмент для съемки плана образует часть системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу с использованием бурильной колонны, которая продолжается от буровой установки до бурового инструмента. Инструмент для съемки плана включает в себя первичное колесо, имеющее диаметр первичного колеса, для вращения вокруг оси первичного колеса для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором. Следующее колесо включает в себя диаметр следующего колеса, который совпадает с диаметром первичного колеса для вращения вокруг оси следующего колеса во время качения. Корпус поддерживает первичное колесо и следующее колесо на одной линии для вращения в одной плоскости таким образом, чтобы ось следующего колеса неподвижно была расположена на расстоянии от оси первичного колеса и по меньшей мере в целом параллельна ей. Энкодер вырабатывает выходной сигнал энкодера в ответ на качение первичного колеса, и акселерометр поддерживается корпусом между осью первичного колеса и осью следующего колеса, причем акселерометр включает в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время качения, который характеризует ориентацию по тангажу инструмента для съемки плана. Процессор вырабатывает контур поверхности упомянутого пути по меньшей мере в вертикальной плоскости по меньшей мере на основе выходного сигнала энкодера и выходного сигнала акселерометра.
В еще одном варианте осуществления и связанном с ним способе инструмент для съемки плана образует часть системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу с использованием бурильной колонны, которая продолжается от буровой установки до бурового инструмента. Инструмент для съемки плана включает в себя одно или несколько колес для качения по поверхности земли по первому пути и второму пути в ответ на перемещение, осуществляемое оператором, при этом первый путь и второй путь отделены друг от друга препятствием. Энкодер вырабатывает выходной сигнал энкодера в ответ на качение одного из колес. Акселерометр включает в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время качения колес, который характеризует ориентацию по тангажу инструмента для съемки плана. Процессор для выработки подземного плана для бурового инструмента под поверхностью земли по отношению к первому пути и второму пути на основе выходного сигнала энкодера и выходного сигнала акселерометра, так что подземный план включает в себя первый сегмент ствола скважины, соответствующий первому пути, второй сегмент ствола скважины, соответствующий второму пути, и сшитый сегмент ствола скважины, который соединяет первый сегмент ствола скважины со вторым сегментом ствола скважины.
В еще одном варианте осуществления и связанном с ним способе инструмент для съемки плана образует часть системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу для выполнения подземных работ с использованием бурильной колонны, имеющей длину бурильной колонны, которая продолжается от буровой установки до бурового инструмента. Инструмент для съемки плана включает в себя одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором. Энкодер вырабатывает выходной сигнал энкодера в ответ на качение одного из колес. Приемник шума вырабатывает данные о шуме в полосе частот в зависимости от качения. Процессор (1) вырабатывает подземный план для бурового инструмента ниже пути, начиная с начальной позиции, в которой бурильный инструмент входит в землю по меньшей мере на основе контура поверхности пути, который определяется с помощью выходного сигнала энкодера и выходного сигнала акселерометра, и (2) связывает данные о шуме, измеренные вдоль пути над поверхностью земли, с расстоянием от начальной позиции вдоль подземного плана на основе контура таким образом, чтобы для любой данной позиции на подземном пути набор коррелированных данных шума соответствовал верхней позиции вдоль пути, которое находится непосредственно над заданной позицией, чтобы компенсировать разницу между первым расстоянием вдоль подземного плана, чтобы достичь заданной позиции, и вторым расстоянием вдоль пути, чтобы достичь верхней позиции, при этом разница возникает из-за вертикального смещения между подземным планом и путем.
В дополнительном варианте осуществления и связанном с ним способе инструмент для съемки плана используется совместно с системой, в которой буровая установка продвигает буровой инструмент, который передает электромагнитный сигнал определения местоположения, для горизонтального направленного бурения через породу, причем система включает в себя множество устройств слежения, позиционируемых на поверхности земли для отслеживания бурового инструмента под землей на основе приема электромагнитного сигнала определения местоположения. Инструмент для съемки плана включает в себя одно или несколько колес для качения по пути на поверхности земли в ответ на действия оператора. Энкодер вырабатывает выходной сигнал энкодера в ответ на качение одного из колес. Процессор измеряет расстояние, пройденное вдоль упомянутого пути, на основе выходного сигнала энкодера и в ответ на обнаружение того, что инструмент для съемки плана прошел заданное расстояние, и вырабатывает указание для оператора разместить один из устройств слежения вдоль пути.
В дополнительном варианте осуществления и связанном с ним способе описан инструмент для съемки плана, предназначенный для использования вместе с системой, в которой буровая установка продвигает буровой инструмент, который передает электромагнитный сигнал определения местоположения, для горизонтального направленного бурения через породу, причем система включает в себя множество устройств слежения, позиционируемых на поверхности земли для отслеживания бурового инструмента под землей на основе приема электромагнитного сигнала определения местоположения. Инструмент для съемки плана включает в себя одно или несколько колес для качения по пути на поверхности земли в ответ на действия оператора. Энкодер вырабатывает выходной сигнал энкодера в ответ на качение одного из колес. Акселерометр включает в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время качения, который характеризует ориентацию по тангажу инструмента для съемки плана. Процессор выполнен с возможностью определения контура поверхности пути в вертикальной плоскости на основе выходного сигнала энкодера и выходного сигнала акселерометра и для выработки указателя для размещения одного из устройств слежения на пути на основе контура.
В другом варианте осуществления и связанном с ним способе описан инструмент для съемки плана, предназначенный для использования с системой, в которой буровая установка продвигает буровой инструмент, который передает электромагнитный сигнал определения местоположения для горизонтального направленного бурения через породу, причем система включает в себя множество устройств слежения, позиционируемых на поверхности земли для отслеживания бурового инструмента под землей на основе приема электромагнитного сигнала определения местоположения. Инструмент для съемки плана включает в себя одно или несколько колес для качения по пути на поверхности земли в ответ на действия оператора. Энкодер вырабатывает выходной сигнал энкодера в ответ на качение одного из колес. Акселерометр включает в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время качения, который характеризует ориентацию по тангажу инструмента для съемки плана. Пользовательский интерфейс служит оператору для обозначения по меньшей мере одной позиции вдоль пути, в которой оператор размещает конкретное одно из устройств слежения, и выполнен с возможностью ввода пользователем целевой глубины для бурения на инструменте целевой позиции непосредственно под конкретным устройством слежения. Процессор определяет контур поверхности пути в вертикальной плоскости на основе выходного сигнала энкодера и выходного сигнала акселерометра и вырабатывает подземный план для бурового инструмента под поверхностью земли, который проходит через целевую позицию.
В еще одном варианте осуществления и связанном с ним способе инструмент для съемки плана образует часть системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу для выполнения подземной операции с использованием бурильной колонны, имеющей длину бурильной колонны, которая продолжается от буровой установки до бурового инструмента. Инструмент для съемки плана включает в себя одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором. Энкодер вырабатывает выходной сигнал энкодера в ответ на качение одного из колес. Приемник шума вырабатывает данные о шуме в полосе частот в зависимости от качения. Процессор (1) вырабатывает подземный план для бурового инструмента ниже пути, начиная с начальной позиции, в которой буровой инструмент входит в землю по меньшей мере на основе контура поверхности пути, который определяется с помощью выходного сигнала энкодера и выходного сигнала акселерометра, и (2) вырабатывает набор выбранных частот для использования вдоль подземного пути, коррелированного с расстоянием, на основе данных о шуме, измеренных на поверхности земли.
В дополнительном варианте осуществления и связанном с ним способе описан инструмент для съемки плана, предназначенный для съемки плана перемещения бурового инструмента во время операции подземного бурения, при этом буровой инструмент образует часть системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу с помощью бурильной колонны, которая продолжается от буровой установки до бурового инструмента. Инструмент для съемки плана включает в себя процессор, выполненный с возможностью разработки подземного плана от текущей точки до целевой конечной точки путем максимизации объема линейного бурения для бурового инструмента от текущей точки до целевой конечной точки.
Краткое описание чертежей
Примеры вариантов осуществления проиллюстрированы со ссылкой на чертежи. Подразумевается, что раскрытые в данном документе варианты осуществления и фигуры являются иллюстративными, а не ограничивающими.
Фиг.1 – вид в перспективе с одной стороны и сзади согласно варианту осуществления инструмента для съемки плана, предназначенного для определения топографической съемки в соответствии с настоящим раскрытием.
Фиг.2 – вид в перспективе с противоположной стороны и сзади согласно варианту осуществления инструмента для съемки плана, показанного на фиг.1.
Фиг.3a и 3b – схематичные виды с частичным разрезом в вертикальной проекции, которые иллюстрируют вариант осуществления рамы, образующей часть инструмента для съемки плана на фиг.1.
Фиг.4 – схематичный вид вертикальной проекции, который иллюстрирует вариант осуществления внутренней конструкции и компонентов инструмента для съемки плана, показанного на фиг.1 и 2.
Фиг.5 – схематичный вид с частичным разрезом в вертикальной проекции, показывающий вариант осуществления части внутренней конструкции инструмента для съемки плана на фиг.1 и 2, включающего в себя колесо энкодера и оптическое считывающее устройство.
Фиг.6а – блок-схема, иллюстрирующая вариант осуществления электрических компонентов инструмента для съемки плана, показанного на фиг.1 и 2.
Фиг.6b – блок-схема, иллюстрирующая вариант осуществления способа определения калибровочного коэффициента для компенсации неустойчивого перемещения, вызванного оператором.
Фиг.7 – схематичный вид в вертикальной проекции оператора, перемещающего инструмент для съемки плана в сторону от буровой установки или в направлении, исходящим от него, вдоль топографических контуров поверхности земли от буровой установки до позиции выхода трассы бурения в соответствии с настоящим раскрытием в качестве части одного из вариантов осуществления разработки подземного плана.
Фиг.8 – другой схематичный вид в вертикальной проекции оператора, перемещающего инструмент для съемки плана в противоположном направлении, к буровой установке, вдоль топографических контуров поверхности земли в качестве другой части разработки подземного плана.
Фиг.9a – блок-схема, иллюстрирующая вариант осуществления способа разработки подземного плана с использованием инструмента для съемки плана согласно настоящему раскрытию.
Фиг.9b – снимок экрана, иллюстрирующий внешний вид варианта осуществления экрана, на котором показано предупреждение о превышении скорости.
Фиг.9c – блок-схема, иллюстрирующая другой вариант осуществления разработки подземного плана с использованием инструмента для съемки плана настоящего раскрытия.
Фиг.10 – схематичный вид в вертикальной проекции, иллюстрирующий подземный план, разработанный на основе наборов данных фактического пути, собранных в соответствии с фиг.7 и 8 и привязанных к топографии поверхности.
Фиг.11 – схематичный вид сверху плана ствола скважины, показанного на фиг.10, иллюстрирующий кривизну от точки входа до точки выхода на подземном плане.
Фиг.12 – еще один схематичный вид сверху, показывающий измененный подземный план, выполненный таким образом, чтобы избежать препятствия.
Фиг.13 – схематичное изображение в вертикальной проекции выполняемой операции бурения с использованием бурового инструмента в соответствии с подземным планом, показанным на фиг.7, и действиями оператора, использующего перемещаемый поверх грунта локатор для подтверждения продвижения бурового инструмента.
Фиг.14 – схематичный вид в вертикальной проекции, иллюстрирующий вариант осуществления способа определения позиции отступа для буровой установки из позиции входа с использованием инструмента для съемки плана, показанного на фиг.1 и 2.
Фиг.15 – схематичный вид в вертикальной проекции, иллюстрирующий вариант осуществления способа определения позиции отступа для буровой установки из позиции под землей с использованием инструмента для съемки плана, показанного на фиг.1 и 2.
Фиг.16 и 17 – схематичные виды в вертикальной проекции, иллюстрирующие вариант осуществления способа разработки подземного плана, включающего препятствие, через которое инструмент для съемки плана не может быть повернут.
Фиг.18 и 19 – схематичные виды в вертикальной проекции, иллюстрирующие вариант осуществления способа разработки подземного плана относительно крутого склона с использованием инструмента для съемки плана, показанного на фиг.1 и 2.
Фиг.20 – схематичный вид в вертикальной проекции, иллюстрирующий использование инструмента для съемки плана согласно настоящему раскрытию для получения характеристик промежуточного сегмента.
Фиг.21a – блок-схема, иллюстрирующая вариант осуществления способа для инструмента для съемки плана настоящего раскрытия сущности, чтобы выработать подземный путь между текущей точкой и целевой конечной точкой.
Фиг.21b – схематичная иллюстрация варианта осуществления способа формирования линейного пути прибытия из текущей позиции бурового инструмента до целевой конечной точки.
Фиг.21c и 21d – схематичные иллюстрации варианта осуществления способа для итеративного формирования участка подземного плана от текущей позиции до целевой конечной точки с заданными значениями для тангажа и рыскания целевой конечной точки.
Фиг.21e – блок-схема, которая иллюстрирует вариант осуществления способа для итеративного формирования участка подземного плана, показанного на фиг.21c и 21d.
Фиг.21f-21h – схематичные иллюстрации деталей варианта осуществления выработки пути, в котором тангаж при прибытии и рыскание при прибытии не указаны для целевой позиции.
Фиг.21i и 21j – схематичные иллюстрации деталей варианта осуществления выработки пути, в котором как тангаж при прибытии, так и рыскание при прибытии указаны для целевой позиции.
Фиг.22 – схематичный вид в вертикальной проекции, иллюстрирующий вариант осуществления системы, использующей инструмент для съемки плана, показанного на фиг.1 и 2, для размещения множества устройств слежения для последующего использования при указании направления бурового инструмента.
Фиг.23 – схематичный вид в вертикальной проекции области, в которой оператор обозначает промежуточный сегмент ствола скважины по отношению к коридору инженерных коммуникаций.
Подробное описание изобретения
Последующее описание представлено для того, чтобы дать возможность обычному специалисту в данной области техники выполнить и использовать изобретение, и предоставлено в контексте патентной заявки и ее требований. Различные модификации в отношении описанных вариантов осуществления будут очевидны специалистам в данной области техники, и общие принципы, изложенные в данном документе, могут быть применены к другим вариантам осуществления. Таким образом, настоящее изобретение не предназначено для ограничения показанными вариантами осуществления, но должно соответствовать самому широкому объему, согласующемуся с принципами и признаками, описанными в данном документе, включая модификации и эквиваленты. Следует отметить, что чертежи не выполнены в масштабе, а являются схематичными по своему характеру, таким образом, который, как считается, лучше всего иллюстрирует представляющие интерес признаки. Описательная терминология может быть принята с целью улучшения понимания читателя в отношении различных видов, представленных на фигурах, и никоим образом не является ограничивающей. Используемый в данном документе термин «план ствола скважины» относится ко всему пути, проходящему под землей от позиции входа в землю до позиции выхода. Термин «сегмент ствола скважины» относится к частичному подземному пути, который недостаточен для составления плана ствола скважины, такого, например, как начальный путь входа для входа бурового инструмента в землю или промежуточный участок всего подземного пути. Сегмент ствола скважины не обязательно включает в себя позицию входа или позицию выхода. Для целей настоящего раскрытия и прилагаемой формулы изобретения термин «подземный план» охватывает как план ствола скважины, так и сегмент ствола скважины.
Как будет видно, настоящее раскрытие раскрывает усовершенствованный инструмент для съемки плана для подземного бурения, который хорошо адаптируется к динамическому характеру строительных площадок для горизонтального направленного бурения. Этот усовершенствованный инструмент для съемки плана представляет собой единый автономный инструмент. Варианты осуществления инструмента для съемки плана позволяют быстро вырабатывать (1) указатель направления подземного плана на целевую точку и/или вокруг препятствия из любой точки вдоль пути ствола скважины с планом ствола скважины или без него, (2) модификации или отклонения от существующих планов ствола скважины в реальном времени во время бурения в каждом конкретном случае для того, чтобы легко и гибко справляться с неожиданными препятствиями и топографией, которые встречаются во время проведения подземных буровых работ, и/или (3) указатели направления по мере необходимости для любого желаемого участка трассы бурения, чтобы решить некоторые возникшие технические проблемы бурения. Усовершенствованный инструмент для съемки плана дополнительно обеспечивает выработку общего плана ствола скважины непосредственно перед началом операции бурения в реальном времени без необходимости в профессиональной топографической съемке. Как будет видно, наличие буровой установки во время разработки подземного плана не требуется, хотя инструмент для съемки плана удобно обеспечивает быструю и удобную разработку подземного плана на месте с развертыванием всех компонентов системы за одну доставку, что сокращает время простоя буровой установки.
Теперь обратимся к чертежам, на которых подобные компоненты могут быть обозначены одинаковыми ссылочными позициями на всех чертежах различного вида, при этом сразу же сосредоточим внимание на фиг.1 и 2, на которых схематично показаны виды в перспективе варианта осуществления инструмента для съемки плана или измерительного прибора, обозначенного, в общем, поз.10 и выполненного в соответствии с настоящим раскрытием. На фиг.1 и 2 представлены виды сзади инструмента 10, чтобы показать его противоположные стороны. Инструмент 10 может включать в себя первичное колесо 20 и следующее колесо 24, каждое из которых поддерживается на соответствующей оси для вращения вокруг первой оси 28 колеса и второй оси 30 колеса. Оси колес по меньшей мере в целом параллельны и разнесены друг от друга по отношению к направлению движения таким образом, чтобы первичное колесо и следующее колесо вращались на одной линии со следующим колесом, находящимся непосредственно позади первичного колеса. Другими словами, первичное колесо и следующее колесо вращаются в общей центральной плоскости 32, которая обозначена расположенной по центру пунктирной линией на периферии первичного колеса 20, показанного на фиг.1. Следует отметить, что каждое колесо включает в себя протектор или шину 34, которая изготовлена из подходящего упругого материала, такого, например, как уретан. Протектор можно до некоторой степени растянуть, чтобы обеспечить удержание на каждом колесе. В поперечном направлении каждая шина, когда она опирается на опорную поверхность, может быть плоской или почти плоской, хотя это не является обязательным требованием. Другими словами, на каждой шине отсутствует выпуклая часть, образованная в поперечном направлении. Таким образом, колеса перемещаются относительно ровно, и диаметр качения каждого колеса не изменяется при поперечном наклоне инструмента для съемки плана, что позволяет обеспечить одинаковый диаметр колеса при наклоне. Оси поддерживаются корпусом 36, который еще не описан. В настоящем варианте осуществления оба колеса имеют одинаковый диаметр с тем, чтобы каждое колесо по существу одинаковым образом реагировало на поверхность земли, по которой оно проезжает, включая бордюры, железнодорожные пути, парковочные разделители, лежачие полицейские и другие подобные неровности. В других вариантах осуществления следующее колесо может иметь диаметр, отличный от диаметра переднего колеса. В еще одних вариантах осуществления следующее колесо может поддерживаться с возможностью вращения вокруг вертикальной оси 38, как показано двусторонней стрелкой 40 с тем, чтобы вертикальная ось могла находиться в центральной плоскости следующего колеса. Следует отметить, что использование двух колес не является обязательным. В других вариантах осуществления следующее колесо 24 может быть исключено или заменено каким-либо другим элементом для контакта с поверхностью земли, таким, например, как полоз.
По-прежнему со ссылкой на фиг.1 и 2, узел 50 рукоятки включает в себя поворотную стойку 54, которая шарнирно поддерживается на валу 58 таким образом, чтобы узел рукоятки мог поворачиваться в угловом диапазоне вокруг оси 59 между передним бампером 60a и задним бампером 60b. Как будет видно на следующей фигуре, поворотная стойка 54 автоматически вращается между бамперами 60a и 60b во время топографического отслеживания местности, что обеспечивает поддержание контакта колес с поверхностью земли в сочетании с другими элементами узла рукоятки. Эти бамперы могут быть образованы средней крышкой 70. Телескопическая труба 74 помещается с возможностью скольжения в верхнем конце поворотной стойки 54. Фрикционный зажим 78 может выборочно защелкиваться для фиксации положения телескопической трубы в поворотной стойке. Шарнир 80 установлен между телескопической трубой 74 и удлинителем 84 рукоятки. Последний включает в себя дистальный или свободный конец, который образует рукоятку 86 для захвата рукой оператора. Шарнир 80 включает в себя запорную ручку 88 для выборочной блокировки вращательной ориентации удлинителя 84 рукоятки относительно телескопической трубы 74 в угловом диапазоне 90, который обозначен двухсторонней дугообразной стрелкой. Оператор может настроить регулировку узла 10 рукоятки в соответствии со своими предпочтениями. Эти регулировки могут быть выполнены или изменены в любое время, в том числе с учетом топографии местности, по которой проходит объект, чтобы поддерживать постоянный контакт каждого из первичных колес и следующего колеса с поверхностью земли в сочетании с автоматическим вращением поворотной стойки 54. Когда оператор сталкивается с бордюром 85 или другим препятствием с крутым профилем или вертикальной поверхностью, оператор может повернуть рукоятку 86, которая сначала поворачивает узел рукоятки до контакта с амортизатором 60b. Продолжение наклона приводит к тому, что первичное колесо 20 поднимается вертикально до тех пор, пока не завершится вертикальный переход для прохода через бордюр 85. Настоящий вариант осуществления, с первичным и следующим колесами одинакового диаметра, обеспечивает зазор, который отделяет корпус (между первичным колесом и следующим колесом) от ровной поверхности по меньшей мере на 13,97 см (5,5 дюйма).
Удлинитель 84 рукоятки в настоящем варианте осуществления включает в себя крепление 92 для поддержки смартфона или планшетного компьютера 94, хотя это не является обязательным требованием. Камера 95 (фиг.2) также может быть снабжена телескопической трубой 74 или любым другим подходящим компонентом, имеющим поле обзора перед инструментом для съемки плана. Камера может вырабатывать неподвижные изображения и/или видео. В некоторых вариантах осуществления роль камеры может выполнять встроенная камера, которая образует часть интеллектуального устройства 94. Пусковой крючок 96 может быть предусмотрен рядом с рукояткой 86 или где-либо еще, чтобы служить в качестве пользовательского интерфейса для приема данных оператора. Следует отметить, что можно использовать любой подходящий тип устройства ввода, включая, не без ограничений, кнопочный переключатель, переключатель с нажимным колпачком, джойстик и сенсорную панель. Пусковой крючок может использоваться для запуска различных функций, таких, например, как маркировка точек входа и выхода, точек пути и препятствий, а также для приостановки сбора данных с тем, чтобы перейти через какое-либо препятствие, такое, например, как река, крутой склон или шоссе, и возобновления сбора данных на противоположной стороне препятствия. Сшивание сегментов ствола скважины, выработанных таким образом, будет рассмотрено ниже в соответствующем абзаце. Как лучше всего видно на фиг.2, кнопка 100 питания обеспечивает включение и выключение устройства, и подставка 104 обеспечивает удобную опору в нижнем положении. Конечно, подставку можно повернуть в приподнятое положение во врем использования устройства.
Обращаясь к фиг.3a и 3b совместно с фиг.1 и 2, теперь будут предоставлены дополнительные детали относительно корпуса 36. На фиг.3a и 3b показаны схематичные изображения с частичным разрезом с обеих сторон варианта осуществления рамы 120, которая образует часть корпуса 36 на фиг.1 и 2. В данном варианте осуществления рама образует внешнюю боковую стенку 124. Первая панель 130 (фиг.1) установлена на периферийной поверхности 134 (фиг.3а), которая является поперечной и ограничивает одну сторону внешней боковой стенки 124 и является поперечной по отношению к ней. Первая панель может быть прикреплена с возможностью съема с использованием подходящих крепежных элементов, таких, например, как резьбовые крепежные детали. Вторая панель 140 (фиг.2) установлена на периферийной поверхности 144 (фиг.3b), которая отделена от внешней боковой стенки 124 ободом 148, расположенным на противоположной стороне рамы 120 по отношению к первой панели 130. Как и первая панель, вторая панель может быть прикреплена с возможностью съема, например, с помощью подходящих крепежных деталей. Канавки 150 уплотнения могут быть образованы вокруг по периферии противоположных отверстий рамы с целью приема подходящего уплотнения или прокладки (не показаны). Напротив внешней боковой стенки 124 рама 120 может уменьшаться по толщине, например, за счет одной или нескольких ступенек 158, до центральной перемычки 160, как показано на фиг.3a и 3b. Рама 120 может быть выполнена из любого подходящего материала, такого, например, как алюминий или пластик, с использованием любых подходящих технологий, таких, например, как экструзия или формование.
Теперь внимание будет обращено на фиг.4 совместно с фиг.1, 2, 3а и 3b. Первая фигура представляет собой вертикальный вид, схематично иллюстрирующий сторону корпуса 36, которая принимает первую панель 130 (фиг.1). Однако следует отметить, что первая панель 130, средняя крышка 70, колеса 20 и 24, узел 50 рукоятки и вал 58 выполнены прозрачными на виде на фиг.4 в целях наглядности. Откидная ножка 104 также выполнена прозрачной, хотя крепление 159 откидной ножки видно. Ступица 160 первичного подшипника включает в себя первичную ось 164, которая поддерживается для вращения. Установочный штифт 166 проходит через ось 164 и входит в дополнительные отверстия в первичном колесе 20, когда последнее входит в первичную ось. Задняя ступица 170 поддерживает заднюю ось 174 для приема с возможностью вращения следующего колеса 24. Следует отметить, что корпус 160 первичного подшипника и задняя ступица 170 могут быть установлены любым подходящим способом. В данном варианте осуществления используются глухие алюминиевые стойки и винты с головкой под ключ таким образом, чтобы первичная ступица и задняя ступица захватывались между первой панелью 130 и второй панелью 140. Как видно на фиг.2, вторая панель 140 окружает аккумуляторный отсек 180. Аккумуляторный отсек включает в себя съемную крышку 184. В данном варианте осуществления аккумуляторный отсек 180 прикреплен ко второй панели 140 с помощью подходящих крепежных деталей. На фиг.4 большая стенка аккумуляторного отсека сделана прозрачной, чтобы показать аккумуляторную батарею 186, которая состоит из шести ячеек размера C, которые могут питать устройство в данном варианте осуществления. Следует отметить, что межкомпонентная электрическая кабельная разводка не показана в целях наглядности, но предполагается, что она присутствует.
Печатная плата 200 показана на фиг.4 как поддерживаемая парой опор 204 плат, которые сами поддерживаются первой панелью 130, например, с использованием глухих алюминиевых стоек и резьбовых крепежных деталей. Опоры 204 могут быть выполнены из материала, который изолирует плату 200 от механических ударов, а также от механических нагрузок и/или перемещений и изгибов, которые могут возникать, когда первая панель или другая конструкция, к которой прикреплены опоры, имеет коэффициент расширения в зависимости от температуры, который отличается от коэффициента расширения печатной платы. Например, печатная плата не будет отклоняться от показанной ориентации спереди назад в ответ на перемещение, вызванное температурой, и не будет происходить изгибания. Опоры поддерживают плату 200 таким образом, чтобы акселерометр 210 располагался в положении, которое по меньшей мере приблизительно находится по центру вдоль пунктирной линии 212, которая продолжается между первой осью 28 колеса и второй осью 30 колеса. Таким образом, акселерометр 210 принимает по существу одинаковые входные ускорения, реагирующие на перемещение первичного колеса 20 по неровностям местности, так как входные ускорения, принимаемые в ответ на следующее колесо, последовательно проезжающее по одной и той же неровности местности. В одном варианте осуществления акселерометр 210 может быть одноосным акселерометром, таким, например, как MEMS-акселерометр, имеющий ось чувствительности, которая расположена по меньшей мере приблизительно параллельно пунктирной линии 212 или на ней. В этой ориентации выходной сигнал акселерометра должен быть равен нулю в том случае, когда пунктирная линия 212 находится на уровне. В других вариантах осуществления может использоваться многоосевой акселерометр, такой, например, как трехосный MEMS-акселерометр. Учитывая, что акселерометры могут показывать смещения и/или нелинейность, для корректировки выходного сигнала акселерометра может применяться компенсация. Следует отметить, что эти отклонения выходного сигнала могут варьироваться от одного акселерометра к другому, даже для изделия с одинаковым номером. Кроме того, могут также возникать несовпадения осей между акселерометром и самим инструментом 10 для съемки плана. Такие несовпадения осей могут возникать между акселерометром и печатной платой, на которой он установлен, а также между печатной платой и рамой инструмента для съемки плана. Соответственно, калибровка может выполняться для определения характеристик каждого акселерометра и его выравнивания после установки, например, путем установки инструмента для съемки плана на испытательном стенде, который обеспечивает точную, но регулируемую опорную платформу, с тем, чтобы можно было измерить один или более выходных сигналов акселерометра с помощью инструмента для съемки плана при разных ориентациях тангажа (то есть вперед-назад) и крена (то есть из стороны в сторону). На основе измеренных выходных сигналов акселерометра можно применить подходящую компенсацию. Одной из таких подходящих форм компенсации является кусочно-линейная компенсация, которая позволяет обеспечить компенсацию в диапазоне углов тангажа и крена.
В одном варианте осуществления акселерометр 210 может быть размещен во внутренней полости печи 214, которая включает в себя регулировку температуры для повышения стабильности показаний акселерометра, которые обычно зависят от температуры, как будет описано ниже. Печь 214 может включать в себя изолированный корпус и/или дополнительную окружающую изоляцию для защиты окружающих компонентов, а также печатную плату, которая поддерживает печь от чрезмерного нагрева. Печь, например, может быть кварцевой печью.
Со ссылкой на фиг.5 совместно с фиг.4, первая фигура представляет собой схематичный вид с частичным разрезом, иллюстрирующий первичную ось 164 с первичной ступицей 160 (фиг.4), изображенную как прозрачную, чтобы показать колесо 230 энкодера, которое вращается вместе с первичной осью. Хотя в данном варианте осуществления энкодер контролирует только первичное колесо, в других вариантах осуществления энкодер может ассоциироваться с каждым колесом. Колесо энкодера включает в себя метки 234 энкодера, которые могут быть равномерно распределены вокруг оси вращения первичной оси. Оптическое считывающее устройство 240 служит энкодером, который жестко установлен для считывания меток 234 энкодера, чтобы выработать выходной сигнал 244 энкодера. В варианте осуществления оптическое считывающее устройство может быть квадратурным энкодером, который вырабатывает пару последовательностей из 248 импульсов, обозначенных как бит 0 и бит 1, где бит 0 опережает бит 1 на 90 градусов в ответ на совместное вращение колеса 230 энкодера в прямом направлении. Для прямого вращения и в качестве неограничивающего примера выходной последовательностью (бит 0, бит 1) является (0,0); (1,0); (1,1); (0,1). Для вращения в обратном направлении выходная последовательность меняется на обратную: (0,0); (0,1); (1,1); (1,0). Путем определения последовательности определяется направление вращения. При использовании последовательности импульсов бита 0 или бита 1 скорость вращения первичного колеса 20, а также пройденное расстояние характеризуются с высокой степенью точности. В варианте осуществления последовательные импульсы в любой последовательности импульсов, которые могут называться отсчетами, могут соответствовать перемещениям с приращениями 9,14 мм (0,03 фута) или меньше в расчете на один отсчет на поверхности земли. Временной интервал I можно контролировать от одного отсчета до другого. Конечно, величина перемещения на отсчет, деленная на I, равна скорости перемещения по земле для любого данного отсчета. Следует отметить, что можно использовать любой датчик или считывающее устройство подходящего типа, которое не ограничивается оптическим вариантом осуществления, включая, но не ограничиваясь этим, датчик на эффекте Холла или магнитный датчик. Последовательные импульсы в последовательности импульсов бита 0 или бита 1 указывают на то, что первичное колесо прошло известное расстояние по поверхности земли, так что контроль отсчетов в любой последовательности импульсов обеспечивает формирование выходного сигнала одометра. Во время непрерывного перемещения по ровной местности с постоянной скоростью первичного колеса 20, находящегося в постоянном контакте с землей, обе последовательности импульсов выдают импульсный выходной сигнал с фиксированной частотой и длительностью импульса. Однако в ответ на перемещение, которое не является непрерывным, или на пробуксовку первичного колеса без контакта с землей, обе последовательности импульсов будут различаться по частоте и ширине импульса. Как будет видно, выходной сигнал оптического считывающего устройства может быть коррелирован с выходным сигналом акселерометра 210, чтобы компенсировать неустойчивое перемещение или изменения скорости перемещения по поверхности земли, вызванные оператором.
Со ссылкой на фиг.4, основная печатная плата 300 включает в себя процессор 310 и память 314 для обеспечения достаточной вычислительной мощности для работы инструмента 10 для съемки плана. Процессор 310 принимает выходной сигнал акселерометра 210, а также выходной сигнал оптического считывающего устройства 240, и сигнал от выключателя 100 питания. В данном варианте осуществления основная плата 300 может поддерживать работу датчика 320 атмосферного давления, модуля 324 GPS, имеющего подходящую антенну, модуля 328 связи и приемник 330 шума, каждый из которых электрически соединен с процессором 210. В одном варианте осуществления GPS 324 может обеспечивать прецизионный выходной сигнал, который может иметь точность, например, примерно до 1 см по долготе/широте и 1,5 см по высоте. GPS 324 может идентифицировать начальную позицию для процессора 300, который затем может индексировать последующие позиции GPS в зависимости от расстояния, пройденного инструментом для съемки плана, хотя модуль GPS не требуется. Выходной сигнал датчика 320 атмосферного давления указывает высоту, которая может служить входными данными для выработки топографических деталей. Например, сшивание сегментов пути вместе для формирования общего пути на поверхности земли может быть основано на высоте конечных точек сегментов пути, смежных с препятствием. Модуль 328 связи может поддерживать двустороннюю беспроводную связь для передачи данных с планшетом или смартфоном 94, например, через Bluetooth или другое подходящее соединение, как будет описано ниже.
В другом варианте осуществления, который включает в себя прецизионную GPS, инструмент 10 для съемки плана может выборочно работать в режиме GPS или в режиме измерения. В одной дополнительной конфигурации режим GPS может быть режимом по умолчанию, с режимом измерения в качестве резервного, когда GPS недоступна или не используется, например, когда GPS не может считать достаточное количество спутников GPS из-за неблагоприятных погодных условий, зданий, местности и/или других факторов, которые могут ограничивать или блокировать доступ к спутниковым сигналам, или когда режим измерения иным образом обеспечивает преимущества по сравнению с режимом GPS. В режиме GPS инструмент для съемки плана не требует использования выходных данных оптического энкодера 240, так что перемещение инструмента для съемки плана и, таким образом, путь, по которому он следует, в основном определяется на основе выходных данных прецизионного GPS. В режиме измерения выходной сигнал оптического энкодера 240 и других подходящих датчиков служит основным источником для получения характеристик перемещения инструмента для съемки плана и, следовательно, пути, по которому он следует. Переключение между режимом GPS и режимом измерения может выполняться вручную по выбору оператора и/или автоматически. Что касается последнего, процессор 310 может контролировать точность выходного сигнала GPS любым подходящим способом, таким, например, как определение количества спутников GPS, от которых прецизионная GPS принимает сигналы в текущий момент времени (то есть с синхронизацией). Если разрешение GPS становится слишком низким, например, исходя из порогового минимального количества спутников, система может переключиться в режим измерения. В одной из дополнительных конфигураций режима измерения данные GPS (при их наличии) могут использоваться для дополнения данных режима измерения, что служит перекрестной проверкой для обеспечения дополнительной точности/надежности. Если результирующая разница между двумя выходными данными на основе перекрестной проверки превышает некоторую величину, например, на основе порогового значения, оператору может быть предоставлено указание, или оператор может получить указание вернуться в последнюю GPS-позицию, в которой вывод данных в режиме GPS и вывод данных в режиме измерения согласованы или не превышают пороговое значение. В варианте осуществления инструмент для съемки плана может переключаться в режим GPS, когда показания акселерометра показывают, что поверхность, по которой движется инструмент для съемки плана, настолько шероховатая, что вероятно, что первичное колесо по меньшей мере время от времени, теряет контакт с поверхностью.
На фиг.6a показана блок-схема, которая иллюстрирует вариант осуществления компонентов инструмента 10 для съемки плана. Пусковой крючок 96 и выключатель 100 питания могут быть связаны с процессором 310. Датчик 320 атмосферного давления, GPS 324, модуль 328 связи и блок 340 датчиков также электрически соединены с процессором 310. Приемник 330 шума может включать в себя подходящую антенну 332, такую как, например, трехосная антенна. Таким образом, измерения шума могут проводиться в интересующем спектре и/или на определенных интересующих частотах. Измерения спектрального шума могут быть основаны, например, на преобразовании временной области в частотную область, таком как быстрое преобразование Фурье (FFT, БПФ). Подходящие технологии измерения шума описаны, например, в патентах США №8,729,901 (в дальнейшем патент «901») и №.9,739,140 (в дальнейшем патент «140»), а также опубликованной заявке на патент США № 2019/0003299 (в дальнейшем «заявка 299»), которые включены сюда путем ссылки. В данном варианте осуществления блок 340 датчика перемещения включает в себя акселерометр 210, находящийся внутри печи 214. Линия 342 управления позволяет процессору 310 по меньшей мере включать и выключать печь 214, в то время как процессор принимает показания от акселерометра по линии 344. В другом варианте осуществления набор датчиков может включать в себя один или несколько трехосных магнитометров, по меньшей мере один трехосный MEMS-акселерометр и по меньшей мере один трехосный гироскоп, такой как трехосный MEMS-скоростной гироскоп. Трехосный магнитометр предоставляет величину и направление магнитного поля Земли, чтобы определить ориентацию рыскания или курс устройства 10. Выходы трехосного гироскопа могут быть объединены для определения позиции и направления движения блока. В еще одном варианте осуществления интегрированный блок измерения инерции (IMU) может служить в качестве датчика 340. Такой IMU может заменить акселерометр 214, находящийся в печи. Подходящее беспроводное соединение 380, такое, например, как соединение Bluetooth, может быть выполнено с помощью смартфона или планшетного компьютера 94, на котором запущено пользовательское приложение 384. Согласно одной особенности приложение 384 отображает измеренную топографию 386 в реальном времени по меньшей мере с точки зрения перспективы пользователя, когда пользователь катит колесо по поверхности земли. Это позволяет пользователю подтвердить, что сбор данных осуществляется по мере продолжения пути, и дает пользователю возможность подтвердить, что измеренная топография соответствует фактическому пути.
Камера 95 может быть связана с приложением 384. Например, в точке входа, точке выхода, каждый раз, когда оператор назначает точку пути, и когда определяется служебная программа, камера 95 и/или интеллектуальное устройство 96 может захватывать неподвижное изображение, которое будет сохранено с учетом этой позиции. В некоторых вариантах осуществления видео в реальном времени может быть предоставлено процессору 310 для целей записи и/или выполнения любой подходящей формы обработки видео, известной в настоящее время или еще не разработанной. Например, обработка может применяться для определения цвета и формы маркировки, такой, например, как маркировка краской, которая была нанесена на поверхность земли геодезистом и/или буровой бригадой. Эти отметки можно распознать и нанести, например, на подземный план вместе с точкой пути. Пользователю может быть предложено добавить дополнительную информацию относительно распознанной маркировки. Например, если маркировка идентифицирует подземную коммуникацию, пользователю может быть предложено ввести глубину, если значение не было автоматически распознано. После выработки подземного плана сохраненные изображения могут отображаться вместе с точками пути, инженерными сооружениями и другими позициями. В качестве другого примера можно применить обработку для определения текстуры поверхности земли перед инструментом для съемки плана. Эта текстура поверхности может затем использоваться для целей установления ограничения скорости, которое еще предстоит описать.
Выходной сигнал оптического датчика 240 колеса используется для измерения расстояния, на которое первичное колесо 20 прокатилось по поверхности земли, а также скорости вращения и, следовательно, скорости инструмента для съемки плана на основе отсчета от оптического энкодера 240 при условии, что каждый отсчет связан с временным интервалом. Направление вращения также можно определить способом, который описан выше. Скорость изменения скорости от одного отсчета к другому соответствует ускорению. Соответственно и учитывая, что каждый отсчет соответствует одному и тому же расстоянию перемещения колеса, ускорение пропорционально разнице во времени Δt от одного отсчета к другому. Если Δt равно нулю, скорость является постоянной. С другой стороны, если Δt не равно нулю, перемещение не является постоянным, так что акселерометр, чувствительный к этому перемещению, будет вырабатывать переходный выходной сигнал, вызванный перемещением, по меньшей мере потенциально приводящий к неверному описанию топографии поверхности. Компенсация таких переходных процессов может применяться любым подходящим способом. В одном варианте осуществления компенсация акселерометра (AC) для данного показания акселерометра определяется на основе выражения:
, Уравнение А
где Δt описано выше, и величина компенсации, которая должна применяться, пропорциональна Δt. Компенсированный выходной сигнал акселерометра (CAO) для данного показания акселерометра вырабатывается в соответствии с выражением:
Уравнение B
Соответственно, AC компенсации вычитается из выходного сигнала AO акселерометра, чтобы получить CAO, который затем используется для получения характеристик поверхности. Как будет видно, коэффициент k можно определять итеративно, например, путем установки коэффициента на начальное значение и затем прокатки инструмента для съемки плана с равным количеством периодов замедления и ускорения по ровной поверхности. При соответствующем значении k ускорения, вызванные перемещением, будут отменены таким образом, чтобы топография отображалась как горизонтальная после пересечения ровной поверхности. Если топография не указана как уровень, коэффициент можно отрегулировать, и процесс калибровки повторяется итеративно до тех пор, пока топография не сходится на уровне.
На фиг.6b показана блок-схема, которая иллюстрирует неограничивающий вариант осуществления способа калибровки для определения значения k для данного инструмента для съемки плана, в общем, обозначенного поз.388. Способ начинается на этапе 390 и переходит к этапу 391, на котором устанавливается начальное значение k, равное нулю. Затем операция переходит к этапу 392, на котором оператор катит инструмент для съемки плана по ровной поверхности по прямой линии, такой, например, как ровный пол внутри здания, с ускорениями и замедлениями, по меньшей мере приблизительно равными количеству интервалов ускорения и замедления. В течение этих интервалов оператор может изменять скорость, например, примерно на 1,6 км/час (1 милю в час). Инструмент для съемки плана прокатывается на подходящее расстояние, например, 45,72 метра (150 футов). На этапе 393 определяется топография. Первоначально k равно нулю, поэтому компенсация не применяется. На этапе 394 топография оценивается по сравнению с уровнем. Следует отметить, что наведенные ускорения и замедления обычно могут вырабатывать колеблющуюся топографию. Если топография отклоняется от уровня более чем на пороговое значение, например, менее одного дюйма (2,54 см). В варианте осуществления порог может находиться на уровне 1/4 дюйма (0,64 см) от уровня над ровной поверхностью, по которой перемещается инструмент для съемки плана. Затем операция переходит к этапу 395, на котором значение k увеличивается на подходящую величину, такую как, например, 0,01, хотя многие значения могут оказаться подходящими. На этапе 396 топография согласно уравнениям (A) и (B) определяется на основе нового значения k и выходных сигналов акселерометра/энкодера, полученных на этапе 392. Новые выходные топографические данные затем сравниваются с уровнем на этапе 394.
Если на этапе 394 определяется, что определенная топография является достаточно ровной, операция переходит к этапу 397, на котором сохраняется текущее значение для k. На этапе 398 вводится нормальный режим работы, в котором применяется компенсация в соответствии с уравнениями (A) и (B) с использованием сохраненного значения k.
Следует отметить, что фактический путь, по которому оператор катит инструмент для съемки плана по поверхности земли, может отличаться от пути, который вырабатывается в качестве вычислительной характеристики фактического пути на основе входных сигналов датчиков. Например, путь, выработанный на основе показаний одного акселерометра, характеризуется двумя измерениями в вертикальной плоскости. В этом случае путь обычно является точным представлением фактического пути, пока инструмент для съемки плана продвигается в вертикальной плоскости. Подземный план, разработанный на основе такого пути, считается подземным (за исключением конечных точек, если таковые имеются), и путь может проецироваться вертикально вниз на подземный план, хотя это не всегда так, как будет обсуждено далее. Измерения или данные, полученные другими датчиками, включая GPS и приемник 330 шума, могут аналогичным образом индексироваться относительно измеренного расстояния вдоль пути и сохраняться по меньшей мере временно в памяти 314 процессором 310. Что касается данных шума, измеренных в полосе пропускания, измерения могут использоваться в дальнейшем или в реальном времени для целей выбора частоты, как описано, например, во включенных выше патентах '901 и '140, а также во включенной выше заявке '299. Выбранные частоты или наборы выбранных частот могут быть проиндексированы относительно измеренного расстояния вдоль пути и/или относительно GPS-позиции, так что выбранные частоты могут изменяться в зависимости от локально измеренного шума.
Обращаясь к фиг.7, схематичный вид в вертикальной проекции системы, которая включает в себя инструмент 10 для съемки плана, в общем, обозначенный поз.400. Система дополнительно включает в себя буровую установку 402 для перемещения бурового инструмента 404 через породу и может включать в себя перемещаемый поверх грунта локатор, который будет показан на следующей фигуре. Буровой инструмент имеет скошенную поверхность. Указание направления бурового инструмента через породу может осуществляться с использованием так называемого режима управления или толкания и режима бурения или прямого направления. В режиме управления ориентация по крену скошенной поверхности бурового инструмента регулируется таким образом, чтобы при продвижении бурильной колонны без вращения бурильный инструмент отклоняется и, таким образом, поворачивался в желаемом направлении. В режиме бурения бурильная колонна и, следовательно, буровой инструмент вращаются при продвижении, так что бурильный инструмент следует по прямому (то есть по линейному) пути. Инструмент для съемки плана представляет собой независимый инструмент, который обеспечивает удобную и быструю разработку на месте направления бурения до целевой точки из любой точки вдоль пути ствола скважины или выработку подземного плана для какого-либо участка из всей трассы бурения или для всей трассы бурения, независимо от того, присутствует или нет буровая установка. Счетчик 405 метража отслеживает длину бурильной колонны во время последующих операций бурения. Один подходящий вариант осуществления счетчика метража или монитора длины бурильной колонны описан в патенте США № 6035951, который включен сюда путем ссылки. Телеметрический сигнал 406 может обеспечивать двунаправленную связь с любым желаемым компонентом системы, таким, например, как перемещаемый поверх грунта локатор, который используется во время операции бурения, но его еще предстоит описать. Оператор 408 показан как перемещающий инструмент 10 для съемки плана от начальной точки или точки 410 входа до конечной точки или точки 412 выхода пути в общем направлении стрелки 414. Следовательно, это перемещение и ассоциированные данные могут называться «исходящими» данными (то есть перемещение бурового инструмента в сторону от буровой установки). Следует понимать, что этот начальный набор данных может быть так же легко собран во «входящем» направлении (то есть в противоположном направлении стрелки 414) по усмотрению оператора. Рельеф поверхности земли 36 является неровным, что в предшествующем уровне техники создает сложные проблемы. В одном варианте осуществления инструмент для съемки плана может быть выполнен с возможностью измерения вертикального рельефа (в плоскости чертежа), что приводит к двумерному контуру или пути на поверхности земли, в то время как в другом варианте осуществления инструмент для съемки плана также может измерять поперечная кривизну пути (перпендикулярно плоскости чертежа) для определения трехмерного контура или пути. Следует отметить, что поперечная кривизна предполагаемого пути впоследствии будет показана на виде сверху. На основе этого трехмерного контура можно разработать трехмерный путь ствола скважины. Набор датчиков, из которых состоит блок 340 датчиков (фиг.6а), может быть настроен в зависимости от количества размеров, определяющих контур поверхности.
Оператор 408 продолжает катить инструмент 10 для съемки плана на выходе из буровой установки по поверхности земли в позиции 412 выхода которая может быть установлена относительно поверхности земли в яме 416. Вдоль пути или под фактическим путем могут присутствовать потенциальные препятствия, такие, например, как подземная коммуникация 420. Оператор может остановить качение инструмента для съемки плана и приостановить сбор данных в любое время, например, с помощью пускового крючка 96 (фиг.1 и 2) или с помощью кнопки 422 паузы (фиг.6) в приложении 384, и затем перезапустить сбор данных. Это позволяет оператору сделать паузу, например, чтобы повторно оценить направление, в котором следует катить инструмент или переместить инструмент, например, на противоположную сторону здания, водоема или другого географического препятствия, и затем повторно начать качение и сбор данных. Во время паузы вращение главного колеса не влияет на измеряемую топографию. Если существует разница по высоте от точки, в которой измерение приостановлено, до точки, в которой измерение возобновляется, показания датчика 320 атмосферного давления могут использоваться для получения характеристик разницы по высоте, как будет дополнительно описано ниже в соответствующем месте. Для относительно короткого пути и с использованием печи 214 (фиг.6а) первый или исходящий набор данных, собранных во время начального перемещения инструмента для съемки плана от точки входа до точки выхода, может использоваться для разработки плана ствола скважины без необходимости в дальнейшем сборе данных инструментом для съемки плана. Конечно, такой однонаправленный набор данных можно собрать, продолжая движение от точки выхода до точки входа. Заявители обнаружили, что стабилизация температуры акселерометра путем помещения акселерометра в печь с регулируемой температурой обеспечивает значительное повышение точности для разработки короткого (например, менее 45,72 метра (150 футов)) плана ствола скважины или сегмента ствола скважины на основе однонаправленного (то есть или входящего) набора данных. Однонаправленный набор данных также подходит для определения отступов, которые еще предстоит описать.
Во время исходящего перемещения оператор может обозначать точки пути, которые показаны как (a)-(n) на фиг.7. Следует отметить, что оператор еще не достиг точки (n) пути, но точка (n) пути, тем не менее, была показана для ясности. Оператор может отметить любое количество точек пути вдоль пути, как показано схематичным образом, с помощью многоточия в сочетании с точками (h) и (n) пути. Каждую точку пути может быть проиндексирована по измеренному расстоянию от точки входа 410, а также по GPS-позициям. Затем подземный план может быть разработан на основе, по меньшей мере частично, точек пути в сочетании с контуром поверхности, например, с использованием экстраполяции, сглаживания и/или аппроксимации кривой, а также ранее неизвестной технологии, с тем чтобы максимально оптимизировать возможности линейного бурения, как описано ниже. В другом варианте осуществления точки пути не требуются. В этом случае подземный путь может быть основан исключительно на показаниях датчиков в зависимости от расстояния вдоль пути, по которому катят инструмент для съемки плана, вырабатывая по существу непрерывный путь на поверхности земли для определения точек, которые разделены, например, долю дюйма (сантиметра). В любом случае подземный план может быть также разработан на основе пути, который определяется входящим набором данных. Еще одним аспектом разработки подземного пути может быть коридор инженерных коммуникаций. Например, такой коридор инженерных коммуникаций может требовать, чтобы глубина установленных инженерных сетей составляла от 1,22 до 1,83 метра (от 4 до 6 футов) относительно поверхности земли. В некоторых случаях выполнение этих требований может оказаться невозможным из-за ограничений топографии и изгиба бурильной колонны, и в этом случае оператору может быть выдано предупреждение.
Что касается использования однонаправленного набора данных, в отличие от двунаправленного набора данных, который еще предстоит обсудить, процедура калибровки может выполняться во время изготовления при предположении, что пользователь идет со скоростью, которая находится в интервале скоростей, который имеет минимальное и максимальное значения для определения калибровочных коэффициентов, которые затем сохраняются инструментом для съемки плана. Эта процедура калибровки может выполняться на основе данных о двунаправленном перемещении по причинам, которые станут очевидными, или с использованием автоматизированного испытательного оборудования. В одном подходящем примере интервал скоростей составляет от 2,41 км/час до 4,02 км/час (от 1,5 миль в час до 2,5 миль в час), предполагая, что скорость ходьбы обычного пользователя равна 3,22 км/час (2 мили в час). Таким образом, не требуется калибровка, выполняемая пользователем. Однако в некоторых случаях может потребоваться калибровка пользователем, особенно в том случае, когда текстура поверхности является очень неровной, такая, например, как 6-дюймовый (15,24 см) щебень, и пользователь не может идти в пределах диапазона скоростей калибровки. Такая калибровка дополняет простое указание оператору замедлить перемещение на основе определения того, что местность является неровной, как будет описано в соответствующем месте ниже. В этой калибровке инструмент для съемки плана перемещается по аналогичной местности на ограниченное расстояние, такое, например, как 30,48 метра (100 футов) в двух направлениях, с коэффициентами калибровки, определяемыми на основе полученных данных.
Хотя исходящего пути и набора данных, которые представлены на фиг.7, может быть достаточно для того, чтобы сформировать основу для точного плана ствола скважины, заявители признают, что может быть существенное преимущество, особенно для более длинных планов ствола скважины или сегментов ствола скважины, связанное с изменением направления на противоположное перемещение инструмента для съемки плана для сбора второго набора данных. То есть фактический путь возвращается к точке входа, как показано на фиг.8, которая описывается непосредственно ниже.
Со ссылкой на фиг.8, в варианте осуществления после достижения конечной точки 412 оператор может приостановить сбор данных с помощью приложения 384 или пускового крючка 96, как описано выше, и затем изменить направления, как показано, и переместить инструмент 10 для съемки плана в направлении буровой установки 402 в общем направлении 418 для получения второго или исходящего набора данных. Набор входящих данных завершается тогда, когда инструмент 10 для съемки плана возвращается к точке 410 входа. В данном варианте осуществления путь разрабатывается на основе как исходящих, так и входящих наборов данных. Разработка плана, основанного на сборе исходящих и входящих наборов данных, устраняет необходимость в калибровке колеса, так как смещения или ошибки, которые могут накапливаться при прохождении исходящего пути, устраняются при прохождении обратного пути. Оператор может продолжать обозначать точки пути вдоль пути, идущем к буровой установке, хотя это и не требуется. Входящие точки пути обозначаются путем добавления апострофа ('). Следует отметить, что оператор еще не достиг точек (d') и (c') пути, но эти точки пути, тем не менее, показаны для ясности. Соответствие между входящими и исходящими точками пути не требуется, поэтому количество входящих точек пути может быть больше или меньше количества исходящих точек пути. Полный и упорядоченный набор точек пути из исходящих и входящих наборов данных показан как (a), (b), (c), (c'), (d), (d'), (e), (e'), (h) и (n) на данной фигуре с целью определения пути. Исходящие и входящие точки пути могут быть объединены и упорядочены во время разработки пути, например, на основе измеренного и зарегистрированного расстояния по поверхности земли. Другое использование точек пути на исходящем или входящем фактическом пути состоит в отметке местоположения критических точек, таких, например, как точка (e) пути, которая является точкой над землей, соответствующей коммуникации 420. Оператор может идентифицировать точку (e) пути как критическую точку пути. Эти важные точки пути можно назвать отмеченными. В варианте осуществления отмеченная точка пути может включать в себя позицию точки пути вдоль пути, расстояние смещения и направление смещения. Точка глубины часто ссылается на вертикальную глубину ниже связанной с ней точки пути, через которую должен пройти буровой инструмент, при этом глубина указывается оператором. В некоторых случаях в ходе процедуры могут быть обнаружена инженерная коммуникация 420 или другие препятствия (обозначены пунктирными линиями), которые обычно называют «подземными препятствиями» (pot-holing), так что можно измерить фактическую глубину коммуникации. Эта измеренная глубина может ассоциироваться с точкой (e) пути и идентифицирована как смещение вниз, которое служит запрещенной глубиной, на которой буровой инструмент не может проходить под точкой (e) пути во время разработки подземного плана. В контексте определений отступов, которые еще предстоит описать, следует принять во внимание, что точка глубины может быть указана с отрицательным значением (то есть над поверхностью земли).
По-прежнему со ссылкой на фиг.8, в варианте осуществления, в который включен GPS 324, приложение 384 может отображать исходящий путь вместе с точками пути, которые обозначил пользователь. В варианте осуществления, который включает в себя, например, набор датчиков, содержащий трехосный гироскоп и трехосный акселерометр, или IMU, приложение 384 может отображать боковое отклонение входящего пути от исходящего пути, например, с помощью стрелок 424 влево/вправо в приложении 384 (фиг.6a), чтобы направлять пользователя таким образом, чтобы входящий путь соответствовал исходящему пути. Когда пользователь приближается к точке входа исходящего пути, точка входа может отображаться так, чтобы пользователь не перемещал инструмент для съемки плана за пределы точки входа.
На фиг.9a показана блок-схема, иллюстрирующая вариант осуществления способа разработки подземного плана на основе однонаправленного сбора данных, в общем, обозначенного поз.600. Способ начинается на этапе 604 и переходит к этапу 606, чтобы установить, что стабилизация температуры является активированной или активируется. Другими словами, печь 214 включается для сбора данных. На этапе 608 однонаправленный набор данных (исходящий или входящий) собирается и сохраняется вместе с любыми обозначенными точками пути, например, как показано на фиг.7. На этапе 609 текущая скорость перемещения или скорость инструмента 10 для съемки плана сравнивается с ограничением или порогом максимальной скорости. В случае превышения предела, снимок экрана на фиг.9b иллюстрирует настраиваемое приложение 384 на планшетном компьютере или смартфоне 94, и на этапе 610 отображается предупреждение 611 для оператора с тем, чтобы он замедлил движение. Предел соответствует скорости инструмента для съемки плана, при которой колеса сохраняют контакт с поверхностью земли, даже если местность может быть неровной. Превышение предела может привести к тому, что первичное колесо потеряет контакт с поверхностью земли, и первичное колесо будет свободно поворачиваться. Конечно, в этой ситуации выходной сигнал энкодера 240 не является точным представлением скорости первичного колеса вдоль пути по поверхности земли. В одном варианте осуществления предел является постоянным. В другом варианте осуществления предел изменяется динамически в ответ на выходной сигнал акселерометра. Например, когда выходной сигнал акселерометра зашумлен, что указывает на шероховатость поверхности, предел можно снизить по сравнению со значением, используемым для гладкой поверхности. Для исключительно шероховатой поверхности, такой, например, как 6-дюймовый (15,24 см) щебень, может быть выполнена калибровка, описанная выше. В варианте осуществления неровность местности измеряется, например, на основе выходного сигнала камеры 95 таким образом, чтобы это измерение способствовало динамическому установлению ограничения скорости. В еще одном варианте осуществления планировщик принимает ввод от пользователя, определяющий тип местности/поверхности, и на основе этого ввода назначается ограничение скорости. Согласно одной особенности текущая скорость перемещения также может сравниваться с пороговой минимальной скоростью, такой, например, как 7,62 см (3 дюйма) в секунду, так как слишком медленное перемещение может вызвать проблемы, включая истечение таймера. В этом случае можно предупредить оператора о необходимости увеличить скорость. В варианте осуществления данные датчика, которые собираются ниже минимальной скорости, можно игнорировать до тех пор, пока скорость не возрастет до значения выше минимального.
После этапа 609 операция переходит к этапу 612, когда предупреждение 610 не требуется. В противном случае переход к этапу 612 выполняется после выдачи предупреждения 610. На этапе 612 может быть введена пауза в ответ на действия оператора, например, чтобы позволить оператору переместить инструмент для съемки плана с первого пути на второй путь, где какое-то препятствие отделяет первый путь от второго пути. После паузы операция возвращается к сбору данных 608. На этапе 613, когда сбор данных завершен, путь характеризуется либо в двух, либо в трех измерениях на основе набора данных. На этом этапе данные от различных датчиков могут быть подвергнуты взвешиванию на основе надежности данных датчиков. Например, зависимость от данных магнитометра может быть взвешена на основе угла падения или наклона магнитного поля, обнаруженного магнитометром. Угол падения – это угол, составляющий силовые линии магнитного поля Земли относительно горизонтали, который широко известен и наносится на план во всем мире. Обнаруженный угол можно сравнить с известным или ожидаемым значением угла падения для региона Земли, в котором выполняется операция бурения. Достаточное отклонение обнаруженного угла от ожидаемого угла падения указывает на то, что поблизости может находиться магнитный материал, такой, например, как достаточное количество черного металла. Арматура является типичным источник магнитной аномалии. Магнитная аномалия из-за магнитного материала искажает магнитное поле Земли, тем самым локально изменяя угол падения и вызывая ошибки указания направления на выходе магнитометра. Взвешивание выходных данных магнитометра может быть основано на величине отклонения обнаруженного магнитного поля от ожидаемого угла падения. Если обнаруженный угол существенно отклоняется от ожидаемого угла падения, использование показаний акселерометра может быть, по меньшей мере временно, предпочтительнее, чем полагаться на показания магнитометра. Если отклонение является очень большим, показания магнитометра можно, по меньшей мере временно, исключить для целей разработки подземного плана. Как только обнаруженный угол вернется к некоторому пороговому значению от ожидаемого угла падения, можно будет возобновить расчет по показаниям магнитометра для определения пути. На этапе 614 подземный план вырабатывается на основе пути (путей). Сглаживание, аппроксимация кривой и/или экстраполяция могут применяться на основе данных, представляющих путь во время этого снятия характеристик. При разработке подземного плана можно учесть любые выявленные точки пути, флаги и другую важную информацию. Например, первый сегмент ствола скважины, основанный на первом пути, описанном выше, может быть сшит со вторым сегментом ствола скважины, основанным на втором пути. В этом отношении конечные точки первого пути и второго пути, которые являются ближайшими к препятствию, могут быть разделены перепадом высот и/или боковым смещением. Можно использовать перепад атмосферного давления, например, в качестве части сшивания сегментов ствола скважины вместе, как будет дополнительно описано в соответствующем месте ниже.
На фиг.9c показана блок-схема, иллюстрирующая вариант осуществления способа разработки подземного плана на основе двунаправленного сбора данных, в общем, обозначенного поз.630. Способ начинается на этапе 634 и переходит к этапу 638, на котором осуществляется сбор первого или исходящего набора данных с учетом любых пауз, вводимых оператором. Следует отметить, что температурная стабилизация акселерометра не требуется, хотя такая стабилизация может использоваться. На этапе 640 второй или входящий набор данных собирается и сохраняется вместе с любыми обозначенными точками пути, как показано на фиг.8, с учетом любых пауз, вводимых оператором. Следует отметить, что любой сбор данных, включая сбор исходящих и входящих данных, показанный на фиг.9c, может использовать функцию ограничения скорости, показанную на фиг.9a. В данном варианте осуществления на этапе 644 исходящий набор данных объединяется с входящим набором данных. Эта комбинация данных обеспечивает существенное преимущество устранения смещений сигналов датчиков (то есть фиксированных смещений измерений), которые фиксируются направленно, например, такие как те, которые проявляются MEMS-акселерометрами, так что калибровка не требуется. Отмена может быть достигнута, например, путем процедуры усреднения с тем, чтобы объединить исходящий и входящий наборы данных.
На этапе 648 путь характеризуется либо в двух, либо в трех измерениях на основе объединенных данных. На этом этапе может применяться взвешивание, как описано выше со ссылкой на фиг. 9a. На этапе 650 подземный план вырабатывается на основе пути с учетом любых точек пути, флагов и другой важной информации, которая была идентифицирована. Сглаживание, аппроксимация кривой, экстраполяция и описанная ниже технология, которая максимально оптимизирует линейное бурение, могут быть применены с учетом объединенных данных, представляющих путь для определения подземного плана с целью учета точек пути.
Со ссылкой на фиг.10 и 11, первая фигура представляет собой схематичное изображение в вертикальной проекции системы 400, включая путь 700 на поверхности 36 земли, и фиг.11 представляет собой схематичный вид сверху или сверху. Подземный план, в данном случае план ствола скважины 710 скважины, показан пунктирной линией. План ствола скважины согласно настоящему примеру может включать в себя три участка: участок 714 входа, основной участок 716 и участок 718 выхода, хотя эта конкретная форма или архитектура в плане ствола скважины не является обязательной, и может использоваться любая подходящая форма. Другие входные данные для процедуры могут включать в себя характеристики используемой буровой установки и бурильной колонны, такие, например, как минимальный (то есть наибольший) радиус изгиба бурильной колонны и диапазон углов рейки для буровой установки 402. Что касается последней фигуры, буровая установка 402 включает в себя зубчатую рейку 720, которая поддерживает бурильную трубу 724. Конечно, отдельные бурильные трубы соединяются во время бурения для удлинения бурильной колонны, которая ведет к буровому инструменту. Зубчатая рейка 720 регулируется в пределах диапазона 728 угла наклона зубчатой рейки, схематичным образом обозначенного двухсторонней дугообразной стрелкой, которая изменяет угол бурового инструмента 404 с целью вхождения в землю. Процедура съемки плана ствола скважины позволяет определить отступ 730 (показан точкой) буровой установки от точки 410 входа и тангаж для участка 714 входа, который определяется углом зубчатой рейки. Например, отступом может быть расстояние по горизонтали наконечника бурового инструмента на буровой установке от точки входа до начала бурения. Отступ выполняется в обратном направлении, противоположном бурению, осуществляемому в прямом направлении. Затем план ствола скважины может изгибаться от участка входа к основному участку с радиусом, который не меньше минимального радиуса изгиба основного участка 716. Глубина основного участка 716 может быть определена на основе требований минимальной глубины ниже нижней точки 734 по контуру пути, чтобы соответствовать минимальным требованиям к покрывающей породе. В данном примере глубина основного участка определяется по меньшей мере частично на основе коммуникации 420, имеющей отмеченную измеренную глубину. Соответственно, основной участок выполнен с возможностью проходить под коммуникацией 420, чтобы поддерживать требуемое минимальное расстояние ниже коммуникации с учетом измеренной глубины. В этом примере переход над коммуникацией приведет к нарушению требования минимального слоя покрывающей породы от поверхности 36. Следует отметить, что глубина плана ствола скважины известна для любой заданной верхней позиции вдоль намеченного пути. Затем основной участок плана ствола скважины изгибается с радиусом, который не меньше минимального радиуса изгиба, к участку 718 выхода, который выходит в точке 412 выхода.
В варианте осуществления на этапе 614, показанном на фиг.9a, или на этапе 650, показанном на фиг.9b, можно определить план ствола скважины, проецируя путь вниз на правильную глубину по его длине, учитывая участок входа, основной участок и участок выхода, а также топографию пути 700, точки пути и отмеченные позиции. Аппроксимация кривой, экстраполяция и сглаживание любого подходящего типа, а также описанная ниже технология, которая максимально оптимизирует линейное бурение, могут применяться к любому участку проекции пути и/или точкам пути, отмеченным позициям и другой важной информации для формирования плана ствола скважины.
На фиг.11 путь 700 показан на виде сверху с тем, чтобы проиллюстрировать его боковую или поперечную кривизну. Конечно, для измерения поперечной кривизны требуется блок датчиков, включающий в себя, например, IMU и/или магнитометр. План 710 ствола скважины принимает линейный маршрут на виде сверху от точки 410 входа до точки 412 выхода, хотя это не является обязательным требованием. Такое упрощение плана ствола скважины обычно желательно для упрощения пути, по которому продвигается бурильный инструмент, и для сокращения линий инженерных коммуникаций, которые еще предстоит установить. Что касается линейного маршрута, заявители признают, что оператору буровой установки трудно следовать по непрерывной и длинной кривой, так как это может потребовать множества затратных по времени переключений между режимом управления и режимом бурения. Как будет дополнительно подробно обсуждено ниже и в варианте осуществления, инструмент 10 для съемки плана может разрабатывать подземный план таким образом, чтобы максимально увеличить прямолинейное или линейное бурение для целей вертикального и поперечного перемещения. Следует понимать, что для линейного бурения требуется только постоянный тангаж. В связи с этим не требуется, чтобы линейное бурение производилось с нулевым тангажом. В соответствии с этим тангаж может быть горизонтальным, наклонным или наклонным для данного линейного подземного пути. Как и в случае с планами 710 и 710’ ствола скважины, подземный план, выполненный в соответствии с этим распознаванием, включает в себя прямые участки (например, 714, 716 и 718), которые соединяются или взаимосвязаны между собой отдельными поворотами. Другими словами, поворот предназначен для размещения бурового инструмента на новом участке для бурения вдоль линейного участка подземного плана. Поворот можно выполнить таким образом, чтобы бурильная колонна могла изгибаться до минимального (то есть самого узкого) радиуса изгиба, но не превышая его.
На фиг.12 показана еще одна схематичная иллюстрация плана 710’ ствола скважины на виде сверху или сверху. В этом примере отмеченная точка (f) пути идентифицирует позицию вдоль намеченного пути, которая находится рядом с препятствием 750, таким, например, как опора электросети. Отмеченная точка (f) пути дополнительно определяет смещение от препятствия и направление на препятствие. Смещение может представлять собой фактическое расстояние от пути 700 или минимально необходимый отступ. Из-за расположения препятствия 750 прямолинейный путь от точки 210 входа до точки 212 выхода является нерабочим, и для обхода препятствия требуется боковая или поперечная кривизна. В этом случае план 710’ ствола скважины разрабатывается, включая кривизну (например, единственную кривую, соединяющую два линейных участка), чтобы поддерживать по меньшей мере минимальное расстояние от препятствия 750.
На фиг.13 показан схематичный вид сбоку системы 400 во время операции бурения, которая включает в себя буровой инструмент 404, который перемещают по плану 710 ствола скважины в ответ на продвижение бурильной колонны. Оператор 408 использует портативный перемещаемый поверх грунта локатор 910 для определения местоположения бурового инструмента на основе сигнала 914 электромагнитного диполя, который передается из бурового инструмента. Сигнал электромагнитного диполя может быть промодулирован данными датчика, включая, не без ограничений, ориентацию по крену и по тангажу бурового инструмента. Оператор может найти верхнюю точку 916, которая находится прямо над буровым инструментом, и подтвердить, что глубина соответствует ожидаемой глубине. В этом отношении ожидаемая глубина плана ствола скважины может быть проиндексирована на основе длины бурильной колонны 918, измеренной счетчиком 405 метража на буровой установке, и рельефа или контура поверхности, измеренной инструментом для съемки плана. Следует отметить, что бурильная колонна состоит из ряда соединяемых с возможностью съема буровых штанг, каждая из которых имеет длину штанги. В качестве неограничивающего примера длина штанги может составлять 3 метра (10 футов). То есть расстояние от точки 410 входа до верхней точки 916 вдоль пути поверхности не совпадает с расстоянием от точки 410 входа до проекции верхней точки 916 на подземный план 710 по меньшей мере из-за контура рельефа. Чтобы решить эту проблему, расстояние вдоль подземного плана может быть коррелировано с расстоянием вдоль пути 700 таким образом, чтобы для любой заданной позиции вдоль пути 700 была известной ожидаемая глубина. Таким образом можно сопоставить другие данные. Например, данные шума могут быть коррелированы, если вариант осуществления инструмента 10 для съемки плана измеряет шум в некоторой полосе пропускания в зависимости от расстояния вдоль пути. Таким образом, для любой данной позиции вдоль пути 700 известна ожидаемая величина шума в полосе пропускания. Следует отметить, что силовые линии магнитного поля сигнала 914 являются горизонтальными в верхней точке, так как бурильный инструмент расположен горизонтально (то есть с нулевым тангажом). Верхняя точка 916 содержится только в плоскости, в которой все силовые линии магнитного поля сигнала 914 параллельны. Эта плоскость нормальна к виду на чертеже и может называться плоскостью 920 определения местоположения, которая отображается как пунктирная линия. Предполагая, что поверхность земли плоская и ровная, эта плоскость определяет линию на поверхности, которая называется линией определения местоположения. Однако, если буровой инструмент имеет наклон, плоскость расположения наклонена таким образом, чтобы линии магнитного потока не были горизонтальными в верхней точке.
По-прежнему со ссылкой на фиг.13 и, как обсуждалось выше, выбор частоты вдоль предполагаемой трассы бурения может быть сделан на основе шума, измеренного с помощью инструмента 10 для съемки плана. В процессе съемки плана инструмент для съемки плана может индексировать измерения шума и/или выбор частоты на основе измерений шума в зависимости от расстояния вдоль пути, по которому движется инструмент для съемки плана. Эти выбранные частоты также можно преобразовать в расстояние по соответствующему подземному пути, которое определяется инструментом для съемки плана. Выбранная частота в зависимости информации о расстоянии в любой подходящей форме может быть доступна через любой подходящий(е) компонент(ы) системы 400, включая, например, буровую установку 402 и/или локатор 910. Таким образом, выбранные частоты, переданные буровым инструментом 404, можно менять любым подходящим способом по мере продвижения бурового инструмента через грунт. В одном варианте осуществления инструкции изменения частоты выдаются на основе выходных данных счетчика 405 метража. В другом варианте осуществления инструкции изменения частоты выдаются на основе GPS-позиции. Изменение или переключение между частотами и/или наборами частот может выполняться любым подходящим способом вручную или автоматически, например, путем выполнения последовательности ориентаций по крену, отправки инструкций вниз в бурильную колонну 918 из буровой установки, а также передачи инструкций в локатор через телеметрию, передавая беспроводным способом инструкции непосредственно из локатора 910 в буровой инструмент или передавая инструкции с помощью телеметрии из локатора в буровую установку, которая затем передает инструкции в буровой инструмент. В любом случае изменения частоты могут быть скоординированы между локатором 910 и буровым инструментом 404 таким образом, чтобы оба устройства оставались синхронизированными или скоординированными с точки зрения выбора частоты по мере продолжения бурения.
Теперь внимание будет направлено на фиг.14 с целью описания дополнительных характеристик универсального инструмента для съемки плана согласно настоящему раскрытию по отношению к отступу буровой установки. На фиг.14 показан инструмент 10 для съемки плана, расположенный в заданной позиции, которая соответствует позиции 410 входа бурового инструмента 404. Буровой инструмент 404 и счетчик 405 метража показаны пунктирными линиями, так как эти элементы еще не требуются во время съемки плана, которая имеет место. Первоначально первичное колесо инструмента для съемки плана размещается непосредственно на позиции 410 входа, так как датчик 240 (фиг.5) измеряет вращение первичного колеса. Затем инструмент для съемки плана катят в обратном направлении 930 по пути 934 на поверхности земли для измерения контура пути в плоскости чертежа. Инструмент 10 для съемки плана прокатывается на расстояние вдоль пути, которое значительно превышает длину буровой установки плюс потенциальный отступ, который, например, по меньшей мере в 1,5 раза больше длины буровой установки. Таким образом определяется контур поверхности земли, на которой будет располагаться буровая установка. Основываясь по меньшей мере частично на контуре, инструмент 10 для съемки плана определяет позицию 940 отступа от точки 410 входа, непосредственно над которой должен располагаться конец бурового инструмента 404, и угол θ1 зубчатой рейки. В этом отношении точка глубины, имеющая отрицательное значение, может быть связана с позицией 940 отступа, по существу рассматривая позицию отступа как точку пути. Точку пути может иметь значение, которое устанавливается оператором заранее, или инструмент для съемки плана может определять угол θ1 зубчатой рейки в пределах диапазона 728 углов зубчатой рейки, хотя это и не требуется. Пунктирная линия 944 указывает путь прохождения бурового инструмента через позицию 410 входа. Следует отметить, что кроме наконечника бурового инструмента, отступ может быть определен относительно любой подходящей характеристики буровой установки. Например, отступ может быть задан для точки на счетчике 405 метража. Определение отступа, которое учитывает топографию поверхности, может быть основано на минимальном горизонтальном расстоянии, необходимом для перехода от одной высоты и ориентации (то есть тангажа) в первой точке до второй высоты и ориентации во второй точке. Разность по высоте между позицией отступа и точкой входа может быть основана на измеренной топографии. Соответственно, подземный путь может быть разработан от первой точки до второй точки, например, способом, который согласуется с приведенным ниже описанием.
На фиг.15 показан инструмент 10 для съемки плана, расположенный в заданной позиции, которая соответствует точке пути (WP), которая находится непосредственно над целевой позицией 950, которая смещена вниз от WP на глубину D и через которую должен проходить буровой инструмент. Можно указать желаемый тангаж в целевой позиции, включая ноль градусов, что потребует криволинейного пути, как будет описано ниже. Первичное колесо инструмента для съемки плана помещается в WP, так как энкодер 240 (фиг.5) измеряет вращение первичного колеса. Затем инструмент для съемки плана катят в обратном направлении 930 (то есть в направлении, противоположном направлению бурения) вдоль пути 934 на поверхности земли для измерения контура пути в плоскости чертежа. Опять же, инструмент 10 для съемки плана прокатывают на расстояние вдоль пути, которое по меньшей мере равно длине буровой установки и достаточное для того, чтобы учесть относительно более длинный отступ в свете задействованной геометрии таким образом, чтобы был определен контур поверхности земли, на котором будет располагаться буровая установка. Основываясь по меньшей мере частично на контуре, инструмент 10 для съемки плана определяет позицию 954 отступа от WP, непосредственно над которым должен располагаться наконечник бурового инструмента 404 (то есть точку глубины, имеющую отрицательное значение), позицию 956 входа и угол θ2 рейки.
Последнее может иметь значение, которое устанавливается оператором заранее, или инструмент для съемки плана может определять угол θ2 рейки в диапазоне 728 углов рейки. Пунктирная линия 958 указывает путь прохождения бурового инструмента через позицию WP входа. Следует отметить, что кроме наконечника бурового инструмента, отступ может быть определен на основе любой подходящей характеристики буровой установки. Например, может использоваться точка на счетчике 405 метража.
По-прежнему со ссылкой на фиг.15, в варианте осуществления пользователь определяет тангаж в начальной точке (которая для простоты предполагается, что в этом примере является точкой входа, но которая может быть любой точкой вдоль пути ствола скважины), тангаж в конечной/целевой точке (например, ноль градусов) и радиус изгиба бурильной трубы (или любом желаемом радиусе изгиба). Разница по высоте между начальной и целевой точкой может быть определена по меньшей мере частично на основе измеренной топографии. Система может определять круговой путь с наименьшим радиусом, равным или превышающим минимальный радиус изгиба, который является касательной к тангажу в каждой упомянутой точке и который обеспечивает желаемое изменение высоты. Если радиус изгиба определенного пути меньше минимального радиуса изгиба, возвращается ошибка, а если нет, то выходные данные представляют собой расстояние по горизонтали между WP и позицией 954 отступа и/или WP и позицией 956 входа. Подземный путь, проходящий через целевую позицию 950 и удовлетворяющий заданным параметрам ориентации, может быть разработан, например, способом, который согласуется с приведенным ниже описанием.
Согласно одной особенности настраиваемое приложение 384 может указывать пользователю, что он прошел достаточно далеко для того, чтобы выработать действительный путь. Другими словами, буровая установка может быть установлена в любой точке, в той или иной точке, где приложение указывает, что путь является действительным.
На фиг.16 и 17 показаны схематичные иллюстрации области 1000 бурения, в том числе инструмент 10 для съемки плана, перемещаемый оператором 408, и препятствие, такое, например, как водоем 1004. Для целей фиг.16 и 17 отмечено направление бурения (то есть направление вперед) слева направо. На фиг.16 показано, как оператор 408 перемещает инструмент 10 для съемки плана вдоль первого пути 1010 в прямом направлении 1014 от первой точки 1018 на первом пути до второй точки 1020 на первом пути у кромки водоема 1004, чтобы определить контур поверхности первый путь. Следует отметить, что первая точка 1018 может быть точкой входа, хотя это не требуется. Как обсуждалось выше, измеренные значения акселерометра могут быть проиндексированы по выходным данным энкодера вместе с GPS-позицией и показаниями атмосферного давления, которые соответствуют измерениям высоты, а также измерениям шума. Достигнув второй точки 1020, оператор может обозначить эту точку как точку пути, связанную с точкой 1030 глубины, которая смещена вертикально вниз на расстояние D1. Следует отметить, что расстояние D1 может быть основано на предварительном знании глубины водоема. Если путь 1010 соответствует требованиям для определения подземного плана на основе однонаправленного набора данных, как описано выше, сбор данных для пути 1010 может быть завершен. С другой стороны, если требуются двунаправленные данные, оператор 408 может изменить направление и катить инструмент 10 для съемки плана назад к первой точке 1018 на первом пути. Следует отметить, что очень короткий конечный участок первого пути 1010, смежный со второй точкой 1020, характеризуется только однонаправленными данными из-за водоема 1004. То есть оператор может сначала двигаться в обратном направлении, стоя на краю водоема с инструментом для съемки плана, расположенного перед ним/ней, в обратном направлении. Однако это не имеет значения, так как общая длина пути обычно будет намного больше, чем длина концевого участка, и дрейф акселерометра на таком коротком расстоянии является также незначительным.
На фиг.17 показан оператор 408 и инструмент 10 для съемки плана на противоположном берегу водоема 1004 после прокатки инструмента для съемки плана по второго пути 1040 от первой точки 1044 до второй точки 1048. Достигнув второй точки 1048, оператор может обозначить эту точку как точку пути, ассоциированную с точкой 1050 глубины, которая смещена вертикально вниз на расстояние D2. Следует отметить, что вторая точка 1048 находится на вершине насыпи 1052 несколько выше водоема 1004. Оператор может установить расстояние D2 равным D1 или сделать оценку высоты инструмента для съемки плана над водоемом и, соответственно, отрегулировать D2. Опять же, измеренные значения акселерометра могут быть проиндексированы по выходным данным энкодера вместе с GPS- позицией и показаниями атмосферного давления. Если путь 1040 соответствует требованиям для определения подземного плана на основе однонаправленного набора данных, как описано выше, сбор данных для второго пути 1040 может быть завершен. С другой стороны, если требуются двунаправленные данные, оператор 408 может изменить направление и катить инструмент 10 для съемки плана назад к первой точке 1044 по второму пути. Как указано выше, очень короткий конечный участок второго пути 1040, смежный со второй точкой 1048 на втором пути, характеризуется только однонаправленными данными из-за водоема 1004.
С помощью данных, характеризующих как первый путь 1010, так и второй путь 1040, в одном варианте осуществления процессор 310 (фиг.6a) может определить подземный план. В другом варианте осуществления данные могут передаваться, и внешний процессор может определить подземный план. Например, внешний процессор может быть расположен на буровой установке или в удаленном центре обработки данных. Для целей настоящего раскрытия предполагается, что локальный процессор 310 определяет подземный план. Следует отметить, что подземный план состоит из сегмента 1 ствола скважины от точки 1018 до точки 1030 глубины, второго или промежуточного сегмента 2 ствола скважины от точки 1030 глубины до точки 1050 глубины и сегмента 3 ствола скважины от точки 1050 глубины до позиции 1044 выхода. Конечно, контур поверхности, ассоциированный с сегментом 2 ствола скважины, не измерялся. Хотя поверхность водоема отмечена как плоская, это не имеет отношения к форме и/или глубине водоема 1004. Следует отметить, что сегмент 2 ствола скважины может называться сшивающим сегментом сегментов ствола скважины, который соединяет сегмент 1 с сегментом 2. Для сегмента сшивающего канала контур поверхности земли обычно неизвестен. Известны конечные точки в координатах GPS сегментов 1 и 3 ствола скважины и разница по высоте между точкой пути 1020 на первом пути и точкой пути 1048 на втором пути на основе, например, показаний атмосферного давления и/или GPS. Длина сшитого сегмента 2 ствола скважины представляет собой боковое смещение поперек водоема, которое может быть определено, например, на основе показаний GPS. Что касается глубины подземного плана, процессор может определить, какое из D1 и D2 на самом деле является самым глубоким, и использовать это значение для определения подземного плана. Например, если оператор вводит расстояние D2 как по меньшей мере приблизительно равное D1, процессор принимает D1 в точке 1030 как глубину. Как обсуждалось выше со ссылкой на фиг.10, и предполагая, что точка 1018 является точкой входа, подземный план может включать в себя участок 1054 входа, основной участок 1058 и участок 1060 выхода. Другие входные данные для процедуры могут включать в себя характеристики буровой установки и используемой бурильной колонны, например, минимальный (то есть самый узкий) радиус изгиба бурильной колонны и диапазон углов зубчатой рейки для используемой буровой установки. Как будет видно, подземный план может состоять из линейных участков, соединена или образована изгибами/поворотами. В варианте осуществления каждая кривая может иметь фиксированный или постоянный радиус изгиба. Отступ для буровой установки можно определить способом, который согласуется с приведенными выше описаниями. Следует понимать, что переход под препятствием, таким как река, может быть выполнен путем установки точек пути с соответствующими глубинами по обе стороны от препятствия в качестве сегмента промежуточного ствола скважины без необходимости определять общий план ствола скважины. Как будет видно, препятствия можно преодолевать на основе заданных промежутков.
На фиг.18 и 19 показаны схематичные изображения области 1100 бурения, в том числе инструмент 10 для съемки плана, перемещаемый оператором 408 с препятствием, таким, например, как крутой склон 1104. Направлением бурения (то есть вперед) является направление слева направо. В этом примере определяется промежуточный участок подземного плана. То есть промежуточный участок расположен между ними, но не включает в себя ни начальную позицию, в которой буровой инструмент входит в землю (то есть позицию входа), ни позицию выхода, в которой буровой инструмент выходит из земли. На фиг.18 показано, как оператор 408 перемещает инструмент 10 для съемки плана вдоль первого пути 1110 в прямом направлении 1014 из первой точки 1118 на первом пути во вторую точку 1120 на первом пути у основания крутого склона 1104, чтобы определить контур поверхности первого пути. Следует отметить, что первая точка 1118 была обозначена оператором как точка пути, ассоциированная с точкой 1130 глубины, которая вертикально опускается от первой точки 1118 на глубину D3. Таким образом, точка 1130 глубины является промежуточной позицией в общем плане бурения. Этот сценарий может возникнуть, например, в случае, когда буровой инструмент уже расположен на глубине 1130, и затем оказался в выбоине или обнаружен с использованием портативного перемещаемого поверх грунта локатора. Соответственно, намерение оператора состоит в том, чтобы определить подземный план, который продолжается от точки 1130 глубины. Во второй точке 1120 оператор обозначил точку пути, которая ассоциирована с точкой 1134 глубины на глубине D4. Первый путь 1110 может характеризоваться однонаправленными или двунаправленными данными, которые определены как подходящие.
Обращаясь к фиг.19, оператор 408 перемещается к вершине крутого склона 1104 и катит инструмент для съемки плана по второго пути 1140 от первой точки 1144 ко второй точке 1148. В первой точке 1144 оператор обозначил точку пути, в том числе точку глубины 1150 на глубине D5. Достигнув второй точки 1148, оператор может обозначить эту точку как точку пути, ассоциированную с точкой 1154 глубины, которая смещена вертикально вниз на расстояние D6. Оператор может установить D3, D4 и D5 как равные, хотя это не является обязательным требованием. Оператор может установить D6 на основе оценки высоты крутого склона 1104 и добавить это значение к D4. Следует отметить, что высота на основе GPS и/или атмосферного давления может отображаться приложением 384 (фиг.9b). Второй путь 1140 может характеризоваться однонаправленными или двунаправленными данными, которые определены как подходящие. В варианте осуществления оператору необходимо только указать точку 1130 глубины и точку 1150 глубины для того, чтобы инструмент для съемки плана позволил разработать подземный план 1160 вместе с первым и вторым контурами поверхности.
Подземный план 1160, который в данном случае представляет собой сегмент ствола скважины, может быть разработан на основе измеренных значений акселерометра, индексированных по выходным данным энкодера вместе с данными GPS и показаниями атмосферного давления для первого пути 1110 и второго пути 1140. Расстояние вдоль сегмента 1160 ствола скважины можно определить на основе прибавления общей длины бурильной колонны до точки 1130 глубины или просто измерить как расстояние от точки 1130 глубины. Как только буровой инструмент достигает точки 1150 глубины, дальнейшее указание направления остается на усмотрение оператора буровой установки. В данном примере точки 1134 и 1154 глубины разделены сшитым сегментом ствола скважины, для которого неизвестен точный контур поверхности, хотя при сравнении данных, характеризующих точку 1120 пути и точку 1148, очевидно, что присутствует препятствие типа крутого склона.
Со ссылкой на фиг.18 и 19, будет очевидно, что подземный план для препятствия типа крутого склона можно легко разработать в том случае, когда крутым склоном является ступенькой вниз, в отличие от ступени вверх, показанной на этих чертежах. В варианте осуществления сегмент сшивания отверстий может соответствовать заданному зазору для известного препятствия, включая, не без ограничений, железнодорожные пути, шоссе, реку и другие препятствия, через которые нельзя катить инструмент для съемки плана, но точку пути со смещением глубины можно установить по обе стороны от препятствия. В варианте осуществления оператор может ввести в инструмент 10 для съемки плана заданный промежуток времени, инициируя сначала паузу с использованием приложения 384, и затем выбирая меню функции быстрого добавления, которое точно определяет то, как добавить заданный промежуток времени. Система/приложение может предложить пользователю заполнить информацию, необходимую для определения выбранного заданного промежутка времени. В некоторых случаях оператор может не знать конкретных параметров, которые необходимы системе для заполнения заданного промежутка времени. В этом случае пользователю может быть предложено ввести эту информацию позже, например, путем добавления подходящего символа и/или изображения, снятого камерой 95, для отображения пользователю на частично нанесенном на план пути. Следует отметить, что оператор 408 может легко добавить путь выхода к сегменту 1160 ствола скважины, просто обозначив точку пути на поверхности земли в позиции, удаленной от точки пути 1050 вправо на виде чертежа и целевой глубине, например, чтобы выйти из углубления.
На фиг.20 показан схематичный вид сбоку системы 1200 (также смотри фиг.7 для аналогичной системы) для перемещения бурового инструмента 404 через грунт, которая включает в себя инструмент 10 для съемки плана. На этом чертеже показана операция подземного бурения, которая уже выполняется, и буровой инструмент достиг точки 1204 на глубине DS. Для целей настоящего примера предполагается, что только что было обнаружено наличие ранее неизвестной и непредвиденной коммуникации 1210. Перед прибытием в точку 1204 буровая бригада могла бы следовать уже устаревшему плану бурения, в котором не учитывалась коммуникация 1210, или, возможно, просто бурила бы в общем направлении до желаемой конечной точки по трассе бурения до обнаружения коммуникации 1210. Гибкость инструмента 10 для съемки плана обеспечивает выработку по существу незамедлительного указания направления в случае, когда возникает ситуация, подобная изображенной. Предполагается, что глубина бурового инструмента DS либо уже известна, либо может быть измерена, например, с помощью локатора 910 (фиг.13), или когда буровой инструмент оказывается в выбоине. Ориентацию по тангажу бурового инструмента можно определить с помощью локатора (фиг.13). Чтобы обеспечить наведение, инструмент 10 для съемки плана используется для определения характеристик промежуточного сегмента, начиная с начальной позиции 1220 на поверхности, которая может находиться непосредственно над буровым инструментом в указанной текущей позиции под землей. Оператор 408 может обозначить точку 1220 как точку пути, характеризующуюся смещением по глубине DS, и катить инструмент 20 съемки плана от точки пути 1220 до следующей точки 1230, также обозначенной как точка пути, которая находится непосредственно над коммуникацией 1210 в направлении 1232, обозначенном стрелкой, и может установить точку пути 1230 на смещение 1234 глубины, то есть на достаточную глубину, чтобы избежать коммуникации 1210. При желании оператор также может установить целевой тангаж для достижения точки 1234 глубины. Предполагается, что буровой инструмент должен пройти под коммуникацией 1210, чтобы обеспечить достаточный слой покрывающей породы над буровым инструментом для коммуникации, которую еще предстоит установить, сохраняя при этом по меньшей мере минимальное расстояние от коммуникации 1210. В дополнение к установке точки пути 1230 или в качестве альтернативы, точка пути 1230 может быть обозначена отмеченной точкой пути со смещением глубины, равным фактической глубине коммуникации 1210 таким образом, чтобы эта глубина была запрещенной на подземном плане. Для справки, отмеченная точка пути описана со ссылкой на фиг.8. Оператор также может изменить направление инструмента 10 для съемки плана и катить инструмент для съемки плана из следующей позиции 1230 обратно в начальную позицию 1220, чтобы разработать двунаправленный набор данных между этими точками. Потребность в двунаправленном наборе данных может быть определена факторами, подробно описанными выше.
На основе однонаправленного или двунаправленного набора данных, характеризующих топографию и расстояние между начальной точкой 1220 и следующей точкой 1230, в сочетании со ассоциированной информацией о точке пути, инструмент 10 для съемки плана вырабатывает указание направления для промежуточного сегмента 1240, который показан пунктирной линией. Предполагая, что оператора не волнует тангаж прибытия в точку 1234 глубины, инструмент для съемки плана может предоставить средний тангаж, необходимый для достижения точки 1234 глубины. Это может включать в себя начальный поворот 1244 в данном примере, который не нарушает минимального радиуса изгиба бурильной колонны для размещения бурового инструмента по прямому курсу 1248, ведущему к точке 1234 пути. В случае указания оператором целевого тангажа в точке 1234 пути, вероятно, потребуется более сложный путь, который может включать в себя два или более поворотов, например, для наклона бурового инструмента вверх в точке пути, например, с использованием линейных участков, соединенных кривыми/поворотами. В варианте осуществления инструмент 10 для съемки плана может обеспечивать курс в позициях 1250 приращения, некоторые из которых обозначаются индивидуально, между начальной позицией 1220 и последующей позицией 1230. Позиции приращения могут быть равномерно или одинаково разнесены на подходящее расстояние, такое, например, как 3 метра (10 футов). Целевая глубина и целевой тангаж могут быть определены для каждой позиции приращения, что полезно для целей определения промежуточного сегмента, который включает в себя несколько поворотов. В другом варианте осуществления позиции 1250 приращения могут быть выполнены таким образом, чтобы соответствовать конечным точкам буровых штанг, которые в конечном итоге используются во время бурения для формирования ствола скважины. Следует понимать, что, когда буровые штанги имеют одинаковую длину буровых штанг, конечные точки буровых штанг остаются разнесенными в грунте на одну длину буровой штанги, так как буровые штанги по отдельности подаются в грунт, тем самым увеличивая последовательно штанга за штангой длину бурильной колонны, при этом конечные точки буровых штанг сохраняют постоянное положение на поштанговой основе. В качестве примера номера штанг от n до n+2 показаны в связи с позициями 1250 приращения, непосредственно справа от начальной точки 1220 на чертеже. Конечные точки буровых штанг могут быть спроецированы вертикально, как показано пунктирными линиями, и нанесены на поверхность земли на основе корреляции расстояния вдоль грунтовой дорожки с измеренной топографией на поверхности земли. Другими словами, конечные точки буровых штанг проецируются вертикально вверх к пути на поверхности земли, нанесенной инструментом для съемки плана. В этом случае расстояние между точками 1250 поверхности может изменяться в зависимости от тангажа бурового инструмента, а также от рельефа поверхности. Соответственно, по мере продолжения бурения оператору доступно указание направления для каждой штанги в точках поверхности, по меньшей мере обеспечивая целевую глубину и заданный тангаж в каждой точке поверхности. В качестве примера, локатор можно использовать для проверки глубины и других параметров бурового инструмента в каждой точке поверхности, штанга за штангой по мере продолжения бурения, для сравнения с запланированной глубиной грунта, чтобы определить, включен ли буровой инструмент на плане. Во время бурения целевые глубины и целевые тангажи для дополнительных позиций могут отображаться либо на локаторе, либо на буровой установке любым подходящим способом.
По-прежнему со ссылкой на фиг.20, следует понимать, что вырабатываемый промежуточный сегмент не ограничивается концом в точке 1234 глубины, но может продолжаться мимо коммуникации 1210 на любую желаемую длину в любую желаемую позицию. Например, оператор может продолжить катить инструмент для съемки плана до дополнительной позиции 1254 поверхности и обозначить эту точку как дополнительную точку пути, имеющую смещение 1258 глубины на любой желаемой глубине 1260 и подходящий целевой тангаж прибытия, хотя последнее не требуется. В этом случае промежуточный сегмент 1262, показанный пунктирной линией, может быть сформирован на основе топографии поверхности, расстояний и обозначенных точек пути. Так как промежуточный сегмент 1262 проходит через точку 1234 глубины, следует отметить, что тангаж вдоль промежуточного сегмента для целей прохождения через точку 1234 глубины будет определяться инструментом для съемки плана, и оператору нет необходимости точно определять целевой тангаж в этой точке пути. Промежуточный сегмент может быть выполнен в виде кривых, соединенных линейными участками, как показано на чертеже. Кроме того, следует также отметить, что точка 1258 глубины может быть указана таким образом, чтобы буровой инструмент выходил из земли или в яме. Аналогичным образом, точка 1258 глубины может быть указана таким образом, чтобы буровая бригада затем продолжала бурение от этой точки глубины в общем направлении для завершения трассы бурения без необходимости в плане ствола скважины. Основываясь на этих особенностях, гибкость инструмента 10 для съемки плана представляется непревзойденной, позволяя буровой бригаде полагаться на инструмент для съемки плана по мере необходимости, чтобы преодолевать большее количество технических участков всей трассы бурения.
С учетом фиг.14-20, хотя это и не требуется, вариант осуществления инструмента 10 для съемки плана может быть предназначен для выработки указания направления, которое по существу является необходимым, а не для сквозного плана отверстия. Например, в данном варианте осуществления может быть наложено ограничение на длину наземного пути, по которому можно катить инструмент для съемки плана с целью выработки соответствующего подземного пути. Таким образом, указание направления может быть, в общем, обеспечено не более чем для сегмента ствола скважины ограниченной длины, например, для 22,86 метра (75 футов).
На фиг.21a показана блок-схема, иллюстрирующая вариант осуществления способа выработки плана или подземного пути на основе данных, собранных инструментом 10 для съемки плана и обозначенных, в общем, поз.1400. Как отмечено выше, этот способ может выполняться процессором 310 (фиг.4), хотя это не является обязательным требованием. В общих чертах, способ включает в себя продолжение подземного плана на основе двух точек одновременно, при этом максимально оптимизируя объем линейного бурения для целей, которые были описаны выше. Первая точка считается текущим местоположением бурового инструмента, от которого должен быть продолжен подземный план, в то время как вторая точка называется целевой конечной точкой. Целевые конечные точки могут быть точками вдоль подземного пути, определяемыми инструментом для съемки плана, и/или точками пути в любой подходящей комбинации. Конкретный способ, которым выполняется способ, зависит от того, заданы ли целевой тангаж и/или целевое рыскание для данной целевой конечной точки. Такие спецификации могут быть сделаны оператором инструмента для съемки плана, например, в связи с точками пути и/или автоматически, например, на основе выходного сигнала датчика рыскания. Для текущего местоположения предполагается, что известны координаты (x, y, z), тангаж и рыскание. Для целевой конечной точки предполагается, что известны по меньшей мере координаты (x, y, z). Задача может быть выполнена любым подходящим процессором или компонентом либо на буровой, либо удаленно. Одним из примеров подходящего процессора является процессор в инструменте съемки плана, и другим примером является процессор, расположенный на буровой установке. Способ начинается на этапе 1404 и переходит к этапу 1406, который позволяет получить желаемый радиус изгиба для используемого оборудования, а также минимальный (то есть самый маленький) радиус изгиба для буровых штанг, которые будут использоваться во время бурения. Оба эти значения могут быть получены, например, путем запроса оператора инструмента для съемки плана. Как правило, желаемый радиус изгиба может быть больше минимального радиуса изгиба, например, в два раза больше минимального радиуса изгиба. На этапе 1408 способ осуществляет сбор доступных данных для текущей позиции и целевой конечной точки и определяет текущий сценарий на основе данных. Можно описать четыре возможных сценария, представленных в таблице 1.
Таблица 1
Известные значения обозначены «X»
На этапе 1414 способ проверяет, является ли текущий сценарий сценарием 1, в котором не определены как целевой тангаж, так и целевое рыскание. Если это так, операция переходит к этапу 1418. В этом случае оператор по существу не заботится об ориентации по тангажу прибытия и ориентации рыскания в целевой конечной точке. Соответственно, может быть спроектирован эффективный путь, который состоит из начальной кривой, за которой следует линейный участок, ведущий непосредственно к целевой конечной точке, как непосредственно описано ниже.
Со ссылкой на фиг.21b, выработка пути сценария 1 схематично обозначена поз.1430. Пунктирная окружность 1432 указывает желаемый радиус изгиба R.
Текущее направление 1434 бурового инструмента указано как вектор в текущем местоположении 1436, расположенном на желаемом радиусе изгиба R, который перпендикулярен текущему направлению 1434. Целевая конечная точка 1438 показана таким образом, чтобы плоскость определялась текущим направлением 1434 и целевой конечной точкой 1438, которая является плоскостью на фиг.21b. Начальный круговой участок 1440 пути продолжается с желаемым радиусом изгиба R от текущего местоположения 1436 до точки P, в которой направление бурового инструмента ведет прямо к целевой конечной точке 1438 в плоскости чертежа. Соответственно, линейный участок 1442 затем конфигурируется таким образом, чтобы продолжаться от точки P непосредственно к целевой конечной точке 1438.
После определения того, что может называться линейным путем прихода на этапе 1418 на фиг.21a, способ затем переходит к этапу 1450, на котором проверяется то, применим ли этот путь, например, на основе заданного желаемого радиуса изгиба. Если целевая конечная точка находится достаточно близко, например, может оказаться невозможным сформировать путь с желаемым радиусом изгиба. Если путь непрактичен, операция переходит к этапу 1452, который уменьшает радиус изгиба, и отправляет операцию обратно на этап 1408, поэтому способ повторяется на основе нового, более узкого радиуса изгиба. Таким образом, радиус изгиба может быть постепенно уменьшен на подходящую величину до тех пор, пока не будет получен приемлемый путь. Если применимый путь отсутствует, даже при минимальном радиусе изгиба, может быть отправлена обратно ошибка. Как только обратно применимый путь определен на основе решения на этапе 1450, на этапе 1454 затем определяется то, продолжается ли путь с другой целевой конечной точкой. Если это так, операция возвращается к этапу 1408 с позиции только что определенной целевой конечной точки, которая затем служит новой или обновленной текущей позицией для продолжения подземного пути.
По-прежнему со ссылкой на фиг.21а и возвращаясь к описанию этапа 1414, если это решение определяет то, что для целевой конечной точки задано по меньшей мере одно из: целевого тангажа и целевого рыскания, операция переходит к этапу 1456, на котором проверяется то, заданы ли как целевой тангаж, так и целевой угол рыскания для целевой конечной точки. Если это так, операция переходит к этапу 1458, на котором вызывается итеративная технология выработки пути, которая будет описана ниже.
Теперь внимание обращено на фиг.21c, на которой схематично показана итеративная технология определения пути, обозначенная, в общем, поз.1460. Технология может использовать инкрементные перемещения с желаемым радиусом изгиба от текущей позиции 1462 по направлению к целевой конечной точке 1464 и от целевой конечной точки 1464 по направлению к текущей позиции 1462, которые определяют начальный участок 1466 и конечный участок (еще не показан) плоскости. Как только противостоящие конечные точки начального участка и конечного участка определяют указатели направления, которые указывают непосредственно друг на друга в пределах подходящих пороговых значений, например, в пределах менее 1 градуса, между начальным участком и конечным участком формируется линейный участок. Первоначально некоторые угловые значения определяются относительно линии 1468, которая соединяет текущую позицию и целевую конечную точку. Первый угол θ1 формируется в первой плоскости, которая определяется линией 1468 и начальным направлением или прямым курсом 1470, который является вектором в текущей позиции, представляющим текущий курс бурового инструмента. Второй угол θ2 формируется во второй плоскости, которая определяется линией 1468 и обратным конечным направлением или обратным курсом 1472, который является противоположным конечному курсу 1472’, который определяется упомянутым курсом целевой конечной точки, включая целевой тангаж и целевое рыскание. Сначала сравниваются по величине углы θ1 и θ2. Инкрементные перемещения чередуются между двумя концами в зависимости от того, какой из этих двух углов имеет наибольшую величину. В данном примере θ1 больше, поэтому первое приращение, имеющее желаемый радиус изгиба, продолжается вдоль начального участка 1466. Величина поворота является достаточной для изменения курса от начального направления на величину, которая может быть равной, например, пороговому значению. Затем сравниваются θ1 и θ2. Если θ2 больше, чем θ1, аналогичное перемещение выполняется во второй плоскости от целевой конечной точки до текущей позиции. На основе сравнения этих двух углов итерация чередуется между начальным и конечным участками.
Обращаясь теперь к фиг.21d, этот процесс приращения продолжается до тех пор, пока прямое направление начального участка 1466 в точке 1474 и обратное направление конечного участка 1476 в точке 1478 не будут продолжаться непосредственно в прямом направлении относительно друг к друга по меньшей мере в пределах пороговых значений. Затем для завершения пути определяется линейный участок 1480 между точками 1474 и 1478.
Возвращаясь к фиг.21a, после завершения итеративной выработки пути операция продолжается на этапе 1450, на котором проверяется то, применим ли путь, определенный описанным выше способом. В противном случае радиус изгиба уменьшается на этапе 1452, и процесс повторяется. Если на этапе 1450 подтверждается то, что путь применим, операция направляется к этапу 1454, чтобы определить то, доступна ли другая целевая конечная точка. Если это так, операция возвращается к этапу 1408.
Возвращаясь теперь к обсуждению этапа 1456, если определяется, что задано только одно из: целевого тангажа и целевого рыскания, операция переходит к этапу 1484, на котором определяется неуказанный целевой тангаж или целевое рыскание на основе геометрических соотношений. Имея это определенное значение, способ затем продолжается на этапе 1458, который был описан выше.
После того, как на этапе 1424 определено, что целевые конечные точки больше не доступны (то есть весь подземный план завершен), операция переходит к этапу 1486, который позволяет интерполировать общий путь и затем вывести конечный результат. Следует понимать, например, что итеративно определенные позиции, составляющие начальные участки 1466 и конечные участки 1466, которых может быть много на общем плане подземного плана, могут быть относительно близко расположены относительно друг от друга, тогда как линейные участки 1480 могут быть очень длинными и ограничены только их концами. На этапе 1424 можно определить, например, равноотстоящие друг от друга позиции вдоль всего подземного плана, чтобы сформулировать полный подземный план и использовать его в качестве ориентира при бурении. В одном варианте осуществления интервал может составлять одну длину буровой штанги, хотя это и не требуется.
На этапе 1488 радиусы изгиба проверяются по всему подземному плану, чтобы гарантировать, например, что минимальный радиус изгиба никогда не нарушается. Если минимальный радиус изгиба нарушен, оператор может сообщить об ошибке. На этапе 1490 подземный план проверяется на предмет пересечения препятствий, например, с известными инженерными коммуникациями.
Со ссылкой на фиг.21e совместно с фиг.21c и 21d, на первой фигуре показана блок-схема, иллюстрирующая вариант осуществления посредством неограничивающего примера этапа 1458, показанного на фиг.21a. Способ начинается на этапе 1504 и переходит к этапу 1508, на котором осуществляется сбор данных текущей конечной точки (то есть в направлении к конечному участку или ближайшей к нему) начального участка 1466 и текущей позиции (то есть в направлении к начальному участку или ближайшей к нему) конечного участки 1476, а также ориентации по тангажу и рысканию для каждого из начального и конечного участков. На этапе 1510 определяются углы θ1 и θ2. На этапе 1514 прямой курс 1518 (фиг.21d) начального участка сравнивается с обратным курсом 1520 конечного участка в точке, ближайшей к начальному участку. Если пороговое значение удовлетворяется таким образом, чтобы прямой курс и обратный курс были по существу совмещены, на этапе 1524 вырабатывается линейный участок 1480, и на этапе 1528 операция возвращается к этапу 1450, показанному на фиг.21а. С другой стороны, если выравнивание не достигается на этапе 1514, операция переходит к этапу 1530, на котором определяется то, больше ли θ1, чем θ2. Если это так, на этапе 1534 начальный участок увеличивается на приращение, и определяются параметры, ассоциированные с конечным начальным участком, ближайшим или противостоящим конечному участку. В противном случае конечный участок увеличивается на приращение, и определяются параметры окончания конечного участка, ближайшего или противостоящего начальному участку. Затем операция возвращается к 1508 для другой итерации процесса, пока не будет выполнено выравнивание на этапе 1514.
Подробно описав выше способы, показанные на фиг.21a и 21e, на данном этапе уместно обсудить дополнительные детали в отношении сценариев 1-4, приведенных в таблице 1. На фиг.21f полученные пути для сценария 1 схематично обозначены поз.1600. Пунктирный круг 1432 продолжает указывать желаемый радиус R изгиба. Вектор V1, который можно назвать начальным направлением пути, указывает текущее направление/курс бурового инструмента из текущего местоположения P1, расположенного на желаемом радиусе изгиба, который перпендикулярен вектору V2, направленному в центр C1 круга 1432. Целевая конечная точка P2 показана вместе с вектором V_P1P2, направленным от P1 к P2 таким образом, чтобы плоскость была ограничена начальным направлением пути V1 и целевой конечной точкой P2.
Так как координаты P1 и P2 известны, вектор V_P1P2 задается в виде:
V_P1P2 = P2 – P1 Уравнение 1
Вектор V_perp продолжается в плоскости чертежа перпендикулярно плоскости чертежа и V1. Вектор V_perp перпендикулярен плоскости чертежа и продолжается в нее, как это задано перекрестным произведением (X в уравнении 2) V_P1P2 и V1:
V_perp = V_P1P2 × V1 Уравнение 2
Как отмечалось выше, V_perp указывает на страницу с фиг.21f. Чтобы найти центр круга 1432 радиусом R, который проходит через точку P1, вектор V2 получается путем поворота вектора V1 на 90 градусов вокруг оси, параллельной оси, определенной V_perp:
 Уравнение 3
Уравнение 3
где M(axis, θ) – оператор вращения (матрица), который вырабатывает поворот на угол θ вокруг оси вектора. В данном случае θ равно 90 градусам. Вектор V2 указывает на центр C1 круга, поэтому позиция C1 представлена следующим образом:
C1 = P1 + R * V2 Уравнение 4
Уравнение 4 предполагает, что вектор V2 является единичным вектором, поэтому либо вектор V1 должен быть нормирован к его длине перед поворотом, либо вектор V2 должен быть нормирован перед применением уравнения 4. Затем вектор V_P2C1 получается от точки P2 до C1:
V_P2C1 = C1 – P2 Уравнение 5
Со ссылкой на фиг.21g совместно с фиг.21f, длина вектора V_P2C1 обозначена как h, как показано, из чего может быть определено на этапе 1450, показанном на фиг.21а, то, можно ли достичь конечной целевой точки P2 с помощью радиус R изгиба. Если h ≥ R, то это возможно, и углы θ3 и θ4 определяются с использованием уравнений:
 Уравнение 6
Уравнение 6
 Уравнение 7
Уравнение 7
С другой стороны, если h < R, то необходимо уменьшить радиус R изгиба и начать заново с уравнения 1 на этапе 1452, показанном на фиг.21a. После того, как соответствующий радиус изгиба найден, позиция точки P3 может быть определена путем получения вектора V3, показанного на фиг.21g, где V3 – отрицательное значение вектора V_P2C1, показанного на фиг.21f, нормированное к его длине. Затем вектор V3 поворачивается на -θ4 вокруг оси, параллельной V_perp с тем, чтобы получить вектор V4:
 Уравнение 8
Уравнение 8
Так как вектор V4 указывает направление от центра C1 круга к точке P3, позиция точки P3 определяется следующим образом:
 Уравнение 9
Уравнение 9
Со ссылкой на фиг.21h, все позиции точек P1, P2, P3 и C1 теперь определены таким образом, что могут быть также определены уравнения для получения характеристик пути от P1 до P2, проходящего через P3. Таким образом, может быть определена любая точка на пути, включая, например, набор равноотстоящих друг от друга точек, которые служат по меньшей мере участком подземного плана. Позиция произвольной точки PA на криволинейном пути между P1 и P3 может быть выработана путем поворота вектора V_C1P1 на угол:
 Уравнение 10
Уравнение 10
где угол θ поворота характеризует вращательное перемещение от P1 к PA, и где:
 Уравнение 11
Уравнение 11
Произвольная точка PB, как показано на фиг.21h, на линейном пути LP между точкой P3 и P2 может быть получена с использованием линейного уравнения:
 Уравнение 12
Уравнение 12
где V3 – единичный вектор в направлении от точки P3 до точки P2 с параметром t, установленным для достижения желаемой точки PB. Любая точка на линии от P3 до P2 определяется значением t. Следует отметить, что отрицательные значения t будут выработать точки слева от P3 на виде, представленном на чертеже. На этом завершается полное описание выработки пути сценария 1.
Что касается сценариев 2 и 3, путь между текущей позицией и целевой конечной точкой определяется, как если бы и тангаж и рыскание целевой конечной точки были не определены, как описано выше в отношении сценария 1. Тангаж и рыскание в целевой конечной точке (определенной вектором t * V3 между P3 и P2 на фиг.21h) определяется и используется для определения ранее неопределенной переменной тангажа или рыскания. Например, если тангаж определен для точки P2, показанной на фиг.21h, а рыскание не определено, рыскание вектора от P3 до P2 на фиг.21h устанавливается в качестве определенного рыскания для ввода в процедуру продолжения пути с определенным тангажом и рысканием по сценарию 4.
Что касается сценария 4, сделана ссылка на фиг.21i, которая схематичным образом иллюстрирует формирование пути в соответствии с этим сценарием, обозначенным, в общем, поз.1700. Читатель помнит, что в сценарии 4 указаны как целевой тангаж, так и целевое рыскание для прибытия бурового инструмента в конечную точку. Кроме того, сценарий 4 в таблице 1 включает в себя итеративный процесс, описанный выше в связи с фиг.21c, 21d и 21e. Процесс для каждого приращения итерации является по существу одинаковым для итеративного продолжения начального участка 1466 (фиг.21c и 21d) от текущей точки до целевой конечной точки или конечного участка 1476 и в обратном направлении от целевой конечной точки к конечной точке. Настоящее описание относится к итеративному перемещению от точки P1 до точки P2, где P1 может представлять собой конечную точку в прямом направлении начального участка или заднюю конечную точку конечного участка, и P2 может представлять собой конечную точку в обратном направлении начального участка или конечную точку в прямом направлении конечного участка, соответственно. В любом случае процедура начинается с позиции P1 в направлении V1, как показано на фиг.21i. Вектор V1 может быть представлен двумя эквивалентными способами: либо стандартным трехмерным вектором, либо параметрами тангажа и рыскания, где тангаж – это угол от горизонтали, и рыскание – это угол (то есть курс) в горизонтальной плоскости. На фиг.21i вектор V1 показан как трехмерный вектор и помечен как тангаж β1 и рыскание γ1.
Продолжение либо начального участка, либо конечного участка в сценарии 4 с использованием постепенно установленного с приращениями кругового поворота пути до следующей позиции P3 с направлением V3 пути начинается с определения единичного вектора V2, указывающего направление от P1 до P2:
 Уравнение 13
Уравнение 13
где прямые скобки обозначают величину (длину) вектора внутри скобок. Затем определяется вектор V_perp, перпендикулярный плоскости, содержащей V1 и V2:
 Уравнение 14
Уравнение 14
Со ссылкой на фиг.21j совместно с фиг.21i, V_perp указывает на страницу или плоскость чертежа. Чтобы переместить приращение с длиной s дуги окружности между P1 и следующей точкой P3, угол α поворота, показанный на фиг.21j, определяется между направлением V1 в точке P1 и направлением V3 в точке P3 как:
 Уравнение 15
Уравнение 15
где R – желаемый радиус изгиба. Направление V3 в точке P3 определяется следующим образом:
 Уравнение 16
Уравнение 16
Тангаж β3 и рыскание γ3 вектора V3 определяются следующим образом:
 Уравнение 17
Уравнение 17
и
 Уравнение 18
Уравнение 18
где V3X, V3Y и V3Z – декартовы координаты вектора V3. В уравнении 18 функция арктангенса – это обычная функция atan2, определенная в диапазоне от -180 до +180 градусов. Учитывая тангаж и рыскание в точке P3 из уравнений 17 и 18, позиция точки P3 определяется с использованием уравнений:
 Уравнение 19a
Уравнение 19a
 Уравнение 19b
Уравнение 19b
 Уравнение 19c
Уравнение 19c
В уравнениях 19 угловые скобки (<>) указывают среднее значение двух углов внутри скобок. После завершения итерации прямой курс на переднем конце начального участка можно сравнить с обратным курсом конечного участка на ее заднем конце, чтобы установить то, является ли достаточным выравнивание для линейного соединения начального участка с конечным участком, так как описано выше.
Заявители отмечают, что способы, раскрытые в данном документе для целей съемки плана, чтобы максимально оптимизировать линейное бурение, не ограничиваются реализацией в виде инструмента съемки плана настоящего раскрытия. Заявители утверждают, что эти способы могут быть реализованы в качестве части любой системы и/или устройства, которое выполняет планирование подземного ствола скважины, при достижении описанных преимуществ.
На фиг.22 показан схематичный вид сбоку системы 1800 (также смотри фиг.7), которая включает в себя инструмент 10 для съемки плана и буровую установку 402 для продвижения бурового инструмента 404 через грунт. Снова следует отметить, что наличие буровой установки 402 во время разработки подземного плана не требуется, но буровая установка показана для полноты картины. На фиг.21 дополнительно показано множество устройств 1804a-1804d слежения, которые совместно могут быть обозначены поз.1804 и расположены вдоль пути 1808 на поверхности земли. Каждое устройство слежения выполнен с возможностью отслеживания бурового инструмента 404 путем приема дипольного электромагнитного локационного поля 1810, которое излучается передатчиком, который размещен в буровом инструменте 404. Один пример конкурирующей системы показан в опубликованной заявке на патент США № 2017/0022799, который включен путем ссылки, хотя система, описанная в нем, не имеет возможности выполнять планирование на основе контура поверхности или обеспечивать указание направления при размещении устройства слежения.
На основе приема поля определения местоположения каждое устройство слежения может выработать команды управления для указания направления бурового инструмента по подземному пути 1812, показанному пунктирной линией, непосредственно под устройствами слежения от точки 1814 входа до цели T. Команды управления для указания направления бурения могут выдаваться, например, таким образом, как обсуждено в патентах США №№ 6,727,704, 8,381,836 и 9,540,879, каждый из которых включен сюда в качестве ссылки. Устройства слежения 1804 могут быть выполнены с возможностью поддержания беспроводной связи с буровой установкой 402 любым подходящим способом. Например, каждое устройство слежения можно выполнить с приемопередатчиком телеметрической информации, который будет служить ретранслятором для ретрансляции сигналов непосредственно в соседние устройства слежения. Сигналы могут ретранслироваться в ответ на активацию устройства слежения. То есть конкретное устройство слежения может быть активировано тогда, когда передатчик бурового инструмента находится в пределах досягаемости этого конкретного устройства слежения. Например, если устройство 1804c слежения активировано, устройство 1804b слежения может принять сигнал 1816 из устройства 1804c слежения и ретранслировать сигнал 1818 в устройство 1804a слежения. В качестве другого примера каждое устройство слежения может быть выполнено как узел сотовой сети с буровой установкой 402, которая служит конечным пунктом назначения для сигналов. Еще один пример: каждое устройство слежения можно выполнить с возможностью передачи телеметрической информации по прямой связи с буровой установкой.
По-прежнему со ссылкой на фиг.22, следует отметить, что оператор 408 может использовать инструмент 10 для съемки плана для измерения контура поверхности пути 1808 способом, описанным выше в отношении фиг.7 и 8. В дополнение к измерению контура поверхности, инструмент для съемки плана позволяет проинструктировать оператора относительно того, когда разместить одно из устройств 1804 слежения на пути. Для пути, который по существу является прямым и достаточно ровным, первое устройство слежения может располагаться на заданном расстоянии от буровой установки, и последующие устройства слежения могут располагаться на одинаковом заданном расстоянии друг от друга на основе измерений расстояния, выполненных инструментом 10 для съемки плана. Это заданное расстояние может быть выбрано, например, чтобы гарантировать, что размещаемое устройство слежения находится в пределах диапазона приема от буровой установки или соседнего устройства слежения на пути. В данном примере устройство 1804a слежения находится на заданном расстоянии от буровой установки, в то время как устройство 1804b слежения размещается на основе контура поверхности пути 1808. Так как контур пути 1808 уменьшается по высоте, связь по линии прямой видимости может быть потеряна, если путь продолжает опускаться, поэтом устройство 1804b слежения помещается даже ниже, чем показанная позиция. Соответственно, с учетом контура поверхности инструмент 10 для съемки плана уведомляет оператора о необходимости разместить устройство 1804b слежения, чтобы не терялась связь по линии прямой видимости с устройством 1804a слежения. Как показано на вставке в пунктирном круге, приложение 384 выдало оператору уведомление 1820, чтобы он поместил устройство 1804c слежения на путь 1808. В ответ на это оператор разместил устройство 1804c слежения рядом с первичным колесом инструмента 10 для съемки плана.
В варианте осуществления устройства слежения могут быть размещены в позициях, обозначенных оператором инструмента для съемки плана. Например, устройство слежения можно разместить непосредственно над коммуникацией. Таким образом, можно улучшить определение местоположения рядом с каждой коммуникацией. Кроме того, целевая глубина может быть указана для бурового инструмента на устройстве слежения с тем, чтобы буровой инструмент не использовался. Устройство 1804c слежения показано помещенным непосредственно над коммуникацией 1830, которая показана пунктирной линией. Местоположение коммуникации может быть заранее известно оператору инструмента для съемки плана, например, по подземному препятствию. Затем буровая система может уведомить оператора буровой установки о необходимости проявлять особую осторожность, когда устройство 1804c слежения является активным из-за наличия коммуникации. Основываясь на этом примере, пользователь может разместить устройство слежения в любом месте на пути 1808, когда инструмент для съемки плана поворачивается, и указать глубину для бурового инструмента на этом устройстве слежения. Например, оператор может захотеть достичь определенной глубины на определенном расстоянии от буровой установки и, следовательно, разместить устройство слежения в этой позиции. Оператор использует инструмент для съемки плана, чтобы обозначить конкретную глубину бурения для этого устройства слежения.
После того, как инструмент для съемки плана достиг точки непосредственно над целью T, оператор помещает устройство 1804d слежения (показанное пунктирной линией) на пути непосредственно над целью и точно определяет глубину DT. Следует отметить, что глубина может быть указана оператором для каждого устройства слежения с указанием глубины, на которой буровой инструмент должен проходить под каждым устройством слежения, хотя это не является обязательным требованием. Инструмент 10 для съемки плана позволяет разработать подземный план 1812 на основе контура поверхности пути 1808, позиции 1814 входа и целевой позиции T. В варианте осуществления, в котором инструмент для съемки плана включает в себя точный GPS, указатели для размещения устройств слежения могут быть сделаны во время обхода во входящем направлении, а не во время исходящего обхода. Во время входящего обхода приложение 384 может указать оператору то, находится ли текущая позиция инструмента для съемки плана слева, справа или на исходящем пути, чтобы обеспечить размещение устройств слежения на пути. В еще одном варианте осуществления оператор может обозначить коммуникации как на входящем обходе, так и на исходящем обходе, так что подземный план может быть разработан с использованием обеих позиций каждой коммуникации, чтобы повысить уверенность в окончательном определенном местоположении каждой коммуникации. Последнее может быть средней позицией из двух (исходящей и входящей) позиций для каждой коммуникации.
На фиг.23 показан схематичный вид сбоку области 1900 бурения, показанной в данном документе с целью иллюстрации дополнительных деталей в отношении использования инструмента 10 для съемки плана в контексте коридора 1904 инженерных коммуникаций, обозначенного пунктирными линиями и имеющего верхний предел 1910 на 1,22 метра (4 фута) ниже поверхности 1912 земли и нижний предел 1914 на 2,44 метра (8 футов) ниже поверхности земли. Бурильная колонна 1920 показана как прикрепленная к буровому инструменту 404. В данном примере предполагается, что буровой инструмент 404 уже достиг показанную позицию непосредственно под точкой 1930 на поверхности в пределах коридора инженерных коммуникаций, который оператор обозначил как начальную точку пути вдоль промежуточного сегмента, и намерение оператора 408 состоит в том, чтобы использовать инструмент для съемки плана, чтобы создать промежуточный сегмент от текущей позиции бурового инструмента до точки 1934 глубины грунта непосредственно под точкой 1936 поверхности, которую оператор обозначил как конечная точка пути промежуточного сегмента, который также находится в пределах коридора 1904 инженерных коммуникаций. Интеллектуальное устройство 96 показано на врезке внутри пунктирного круга 1940, в котором приложение 384 выдает предупреждение 1944 о нарушении коридора инженерных коммуникаций. В частности, буровой инструмент не сможет опускаться, даже изогнувшись при минимальном радиусе изгиба 1946, со скоростью, достаточной для того, чтобы оставаться ниже верхнего предела 1910 коридора инженерных коммуникаций. Другими словами, из-за начальной позиции промежуточного сегмента и ограничений, налагаемых бурильной колонной, невозможно пробурить промежуточный сегмент, запрашиваемый оператором, без нарушения коридора инженерных коммуникаций. Чтобы устранить эту затруднение, потребуется отвести буровой инструмент, используя бурильную колонну, и выполнить повторное бурение, чтобы буровой инструмент находился на достаточной глубине ниже точки 1930 пути в начале промежуточного сегмента.
Со ссылкой на фиг.1 и 2, инструмент 10 для съемки плана в варианте осуществления может включать в себя то, что может называться режимом рулетки, в котором приложение 384 (фиг.6a) отображает расстояние, пройденное инструментом для съемки плана способом, который напоминает работу измерительного колеса предшествующего уровня техники. В этом режиме обратное вращение первичного колеса вычитается из общего расстояния, пройденного инструментов для съемки плана в прямом направлении.
Вышеизложенное описание изобретения было представлено в целях иллюстрации и описания. Оно не предназначено для того, чтобы быть исчерпывающим или ограничивать изобретение точной формой или раскрытыми формами, и другие модификации и вариации могут быть возможны в свете вышеупомянутых идей, в которых специалисты в данной области техники распознают определенные модификации, перестановки, дополнения и их подкомбинации.
В настоящую заявку предпочтительно включены все элементы, части и этапы, описанные в данном документе. Следует понимать, что любые из этих элементов, частей и этапов могут быть заменены другими элементами, частями и этапами или полностью удалены, что будет очевидно специалистам в данной области техники.
В целом, данный документ раскрывает по меньшей мере следующее: инструмент для съемки плана планирует перемещение бурового инструмента для операции подземного бурения. Инструмент для съемки плана включает в себя одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором, чтобы определить контур поверхности и выработать направление движения бурового инструмента для достижения заданной позиции. Планирование может дополнительно основываться на точках пути. Инструмент для съемки плана можно поворачивать в одном или двух направлениях для определения контура поверхности. Двунаправленное перемещение устраняет фиксированное смещение акселерометра. Сшивание путей используется для съемки плана вокруг препятствий. Инструмент для съемки плана позволяет облегчить размещение устройства слежения. Инструмент для съемки плана позволяет проводить сбор информацию о шуме для целей выбора частоты. Описанный способ максимально оптимизирует линейное бурение при использовании подземного плана. Компенсация и/или предупреждения предусмотрены для неустойчивого, быстрого и медленного перемещения инструмента для съемки плана при измерении контура поверхности.
В этом документе раскрываются по меньшей мере следующие концепции.
1. Инструмент для съемки плана, предназначенный для съемки плана перемещения бурового инструмента во время операции подземного бурения, причем буровой инструмент образует часть системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу с помощью бурильной колонны, которая продолжается от буровой установки к буровому инструменту, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором, причем путь по меньшей мере включает в себя: (1) начальную позицию на поверхности рядом с текущей позицией бурового инструмента, причем буровой инструмент находится в текущей ориентации, и (2) следующую позицию на поверхности рядом с заданным пользователем целевой позицией для бурового инструмента, которая находится впереди текущей позиции;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес между начальной позицией на поверхности и следующей позицией на поверхности;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения колес вдоль пути, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор для приема пользовательского ввода, который точно определяет целевую позицию перед буровым инструментом, причем буровой инструмент находится в текущей позиции и текущей ориентации, и для выработки указаний направления для бурового инструмента для достижения целевой позиции на основе текущей позиции, текущей ориентации, выходного сигнала энкодера и выходного сигнала акселерометра.
2. Инструмент для съемки плана согласно концепции 1, в котором указание направления включает в себя по меньшей мере ориентацию по среднему углу тангажа, которую необходимо поддерживать для достижения целевого местоположения.
3. Инструмент для съемки плана согласно концепции 1 или 2, в котором начальная позиция на поверхности находится непосредственно над буровым инструментом в текущей позиции.
4. Инструмент для съемки плана согласно концепциям 1-3, в котором следующая позиция на поверхности находится непосредственно над заданной позицией.
5. Инструмент для съемки плана согласно концепциям 1-3, в котором следующая позиция на поверхности находится в точке, где буровой инструмент должен выйти из земли.
6. Инструмент для съемки плана согласно концепциям 1-5, в котором целевую позицию является промежуточной позицией в земле вдоль всего подземного пути перед выходом бурового инструмента из земли.
7. Инструмент для съемки плана согласно концепциям 1-5, в котором указание направления по меньшей мере указывает целевую ориентацию по тангажу для достижения целевой позиции.
8. Инструмент для съемки плана согласно концепциям 1-7, в котором процессор выполнен с возможностью выработки дополнительных указаний, ассоциированных по меньшей мере с одной точкой поверхности между начальной позицией на поверхности и следующей позицией на поверхности.
9. Инструмент для съемки плана согласно концепции 8, в котором дополнительное указание направления для упомянутой точки поверхности точно определяет по меньшей мере желаемую глубину, ассоциированную с точкой поверхности.
10. Инструмент для съемки плана согласно концепции 9, в котором дополнительное указание направления для упомянутой точки поверхности точно определяет желаемый тангаж, ассоциированный с точкой поверхности.
11. Инструмент для съемки плана согласно концепциям 1-7, в котором процессор выполнен с возможностью выработки дополнительных указаний, ассоциированных с множеством точек поверхности, разнесенных между начальной позицией на поверхности и следующей позицией на поверхности.
12. Инструмент для съемки плана согласно концепции 11, в котором дополнительное указание направления по меньшей мере включает в себя желаемую глубину, ассоциированную с каждой из точек поверхности.
13. Инструмент для съемки плана согласно концепции 12, в котором дополнительное указание направления точно определяет желаемый тангаж, ассоциированный с каждой из точек поверхности.
14. Инструмент для съемки плана согласно концепции 11, в котором точки поверхности разнесены по поверхности на равное расстояние приращения.
15. Инструмент для съемки плана согласно концепциям 1-14, в котором упомянутый процессор выполнен с возможностью выработки предупреждения о скорости в ответ на выходной сигнал энкодера, указывающий скорость, которая превышает пороговую скорость.
16. Инструмент для съемки плана согласно концепциям 1-15, в котором упомянутый процессор дополнительно вырабатывает указание направления на основе минимального радиуса изгиба упомянутой бурильной колонны.
17. Инструмент для съемки плана согласно концепции 14-16, в котором бурильная колонна состоит из ряда съемно присоединяемых буровых штанг, причем каждая буровая штанга включает в себя длину штанги для продолжения под землей способом штанга за штангой для определения конечных точек буровых штанг под землей, и точки поверхности разнесены друг от друга на основе проецирования конечных точек буровых штанг на поверхность земли.
18. Инструмент для съемки плана согласно концепции 17, в котором указание направления включает в себя целевую глубину и целевой тангаж для каждой конечной точки буровой штанги.
19. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения колес, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор для выработки подземного плана для бурового инструмента под поверхностью земли относительно упомянутого пути на основе выходного сигнала энкодера и выходного сигнала акселерометра.
20. Инструмент для съемки плана согласно концепции 19, в котором упомянутый процессор определяет контур поверхности упомянутого пути в вертикальной плоскости.
21. Инструмент для съемки плана согласно концепции 19-20, в котором упомянутый процессор выполнен с возможностью выработки предупреждения о скорости в ответ на выходной сигнал энкодера, указывающий скорость, которая превышает пороговую скорость.
22. Инструмент для съемки плана согласно концепции 19-21, в котором упомянутый процессор вырабатывает подземный план в ответ на указание оператора относительно того, что завершен сбор выходного сигнала энкодера и выходного сигнала акселерометра вдоль пути от начальной позиции до конечной позиции.
23. Инструмент для съемки плана согласно концепции 19-22, в котором упомянутый процессор дополнительно вырабатывает подземный план на основе минимального радиуса изгиба упомянутой бурильной колонны.
24. Инструмент для съемки плана согласно концепции 19-23, в котором подземный план представляет собой план ствола скважины, который продолжается от позиции входа до позиции выхода.
25. Инструмент для съемки плана согласно концепции 19–23, в котором подземный план представляет собой сегмент ствола скважины, который представляет собой не более чем участок общего подземного пути, который продолжается от позиции входа до позиции выхода.
26. Инструмент для съемки плана согласно концепции 25, в котором сегмент ствола скважины представляет собой начальный участок входа, начинающийся с позиции входа, которая служит начальной позицией, и заканчивающийся в промежуточной позиции.
27. Инструмент для съемки плана согласно концепции 25, в котором сегмент ствола скважины представляет собой участок выхода, начинающийся от промежуточной позиции и заканчивающуюся в позиции выхода, которая служит конечной позицией.
28. Инструмент для съемки плана согласно концепции 25, в котором сегмент ствола скважины представляет собой промежуточный участок, который не включает в себя позицию входа или позицию выхода.
29. Инструмент для съемки плана согласно концепции 19-28, в котором упомянутое одно или несколько колес содержит пару рядных колес.
30. Инструмент для съемки плана согласно концепции 19–29, дополнительно содержащий:
датчик GPS для выработки GPS-информации о местоположении; и
упомянутый процессор, выполненный с возможностью функционирования в режиме измерения на основе выходного сигнала акселерометра и выходного сигнала энкодера и в режиме GPS на основе GPS-информации о местоположении.
31. Инструмент для съемки плана согласно концепции 30, в котором упомянутый процессор выполнен с возможностью переключения из режима измерения в режим GPS на основе выходного сигнала акселерометра, указывающего то, что инструмент для съемки плана катят по шероховатой поверхности, так что колеса по меньшей мере периодически теряют контакт с поверхность земли.
32. Система горизонтального направленного бурения, содержащая:
буровой инструмент для формирования ствола скважины;
буровая установка для перемещения бурового инструмента; и
инструмент для съемки плана, содержащий:
одно или несколько колес для качения по поверхности земли, реагирующих на перемещение, осуществляемое оператором, вдоль пути,
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес,
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения колес вдоль пути, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор для выработки подземного плана для бурового инструмента под поверхностью земли относительно упомянутого пути на основе выходного сигнала энкодера и выходного сигнала акселерометра.
33. Система согласно концепции 32, в которой упомянутый процессор расположен в инструменте для съемки плана.
34. Система согласно концепциям 32-33, в которой упомянутый процессор удаленно расположен от инструмента для съемки плана.
35. Система согласно концепции 34, в которой упомянутый процессор расположен на буровой установке.
36. Система согласно концепции 32-35, в которой упомянутый процессор вырабатывает подземный план в ответ на указание оператора относительно того, что завершен сбор данных вдоль пути от начальной позиции до конечной позиции.
37. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу в прямом направлении с использованием бурильной колонны, которая продолжается от буровой установки к буровому инструменту, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана;
пользовательский интерфейс для приема ввода оператора, назначающего одну или несколько позиций вдоль пути; и
процессор для выработки подземного плана для бурового инструмента под поверхностью земли по отношению к упомянутому пути на основе выходного сигнала энкодера, выходного сигнала акселерометра и обозначенных позиций.
38. Инструмент для съемки плана согласно концепции 37, в котором конкретная обозначенная позиция определяет начальную точку пути под землей, которая находится непосредственно внизу на заданной глубине и через которую должен проходить буровой инструмент, и подземный план по меньшей мере продолжается от позиции входа по пути, где буровой инструмент входит в грунт, до начальной точки подземного пути.
39. Инструмент для съемки плана согласно концепции 38, в котором упомянутый процессор определяет позицию отступа для буровой установки на пути в обратном направлении, противоположном прямому направлению, из конкретной обозначенной позиции по меньшей мере на основе контура поверхности пути в вертикальной плоскости, которая характеризуется выходным сигналом энкодера и выходным сигналом акселерометра между позицией отступа и конкретной обозначенной позицией.
40. Инструмент для съемки плана согласно концепции 39, в котором процессор дополнительно определяет позицию входа для бурового инструмента, чтобы пройти через поверхность земли между позицией отступа и конкретной обозначенной позицией по меньшей мере на основе контура поверхности пути.
41. Инструмент для съемки плана согласно концепции 37-40, в котором конкретная обозначенная позиция определяет точку входа, в которой буровой инструмент должен пройти через поверхность земли.
42. Инструмент для съемки плана согласно концепции 40, в котором буровая установка включает в себя регулируемый диапазон угла наклона зубчатой рейки для бурового инструмента для входа в землю, и процессор определяет конкретный угол зубчатой рейки в пределах диапазона углов наклона зубчатой рейки.
43. Инструмент для съемки плана согласно концепции 37-42, в котором конкретная обозначенная позиция определяет препятствие, которое следует избегать с помощью плана ствола скважины.
44. Инструмент для съемки плана согласно концепции 43, в котором препятствие помечается с указанием направления и расстояния смещения от обозначенной позиции на основе взаимодействия оператора с пользовательским интерфейсом.
45. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент в прямом направлении через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли вдоль пути в обратном направлении, противоположном прямому направлению, начиная с заданной позиции и в ответ на перемещение, осуществляемое оператором;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес в обратном направлении;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения в обратном направлении, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор для выработки позиции отступа для буровой установки по пути в обратном направлении от заданной позиции на основе контура поверхности пути в обратном направлении, что характеризуется выходным сигналом энкодера и выходным сигналом акселерометра.
46. Инструмент для съемки плана согласно концепции 45, в котором заданной позицией является позиция входа для бурового инструмента для прохождения через поверхность земли.
47. Инструмент для съемки плана согласно концепции 45 или 46, в котором заданная позиция обозначает позицию под землей непосредственно внизу, которая находится на заданной глубине и через которую должен проходить буровой инструмент во время бурения.
48. Инструмент для съемки плана согласно концепции 47, в котором процессор дополнительно выполнен с возможностью определения позиции входа для бурового инструмента для ввода в землю между позицией отступа и заданной позицией по меньшей мере на основе контура поверхности пути.
49. Способ определения позиции отступа для настройки буровой установки, которая образует часть системы для горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент в прямом направлении через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый способ содержит:
измерение выходного сигнала акселерометра, индексированного в зависимости от расстояния вдоль пути на основе качения по меньшей мере одного колеса в обратном направлении, противоположном прямому направлению, начиная с заданной позиции; и
определение позиции отступа для буровой установки на пути в обратном направлении от заданной позиции по меньшей мере на основе контура поверхности пути в обратном направлении, которая характеризуется измеренным выходным сигналом акселерометра и измеренным расстоянием.
50. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли по пути в ответ на действия оператора;
энкодер для выработки выходного сигнала энкодера в ответ на качение по меньшей мере одного из колес;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана, и упомянутый выходной сигнал акселерометра также включают в себя одну или несколько ошибок тангажа в ответ на ускорения, вызванные оператором, которые возникают в результате одного или нескольких изменений скорости инструмента для съемки плана во время упомянутого качения, осуществляемого оператором; и
процессор, выполненный с возможностью обнаружения изменений скорости на основе выходного сигнала энкодера и применения компенсации к выходному сигналу акселерометра на основе обнаруженных изменений для выработки скомпенсированной ориентации по тангажу по существу с удаленными ошибками по тангажу.
51. Инструмент для съемки плана согласно концепции 50, в котором процессор применяет компенсацию к выходному сигналу акселерометра на основе калибровочного коэффициента.
52. Инструмент для съемки плана согласно концепции 50 или 51, в котором энкодер вырабатывает импульсный выходной сигнал в ответ на качение, включающий в себя последовательность импульсов, которые разделены по времени интервалом между импульсами, который изменяется в зависимости от изменений скорости, и упомянутый процессор определяет ускорения, вызванные оператором, на основе скорости изменения интервала между импульсами.
53. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения колес, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор для выработки (1) указания для оператора, когда скорость качения превышает пороговую скорость, чтобы порекомендовать оператору снизить ее, тем самым поддерживая контакт между колесами и поверхностью земли, и (2) контура поверхности пути в вертикальной плоскости на основе выходных данных энкодера и акселерометра.
54. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
колесо для качения по поверхности земли по пути в ответ на перемещение, осуществляемое оператором;
энкодер для выработки выходного сигнала энкодера в ответ на качение колеса;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана, причем упомянутый выходной сигнал акселерометра показывает чувствительный к температуре дрейф;
печь, которая принимает упомянутый акселерометр для поддержания по меньшей мере приблизительно постоянной температуры акселерометра, чтобы существенно уменьшить упомянутый чувствительный к температуре дрейф во время упомянутого качения; и
процессор для выработки контура поверхности упомянутого пути по меньшей мере в вертикальной плоскости на основе выходного сигнала энкодера и выходного сигнала акселерометра.
55. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
колесо для качения по поверхности земли по пути в ответ на перемещение, осуществляемое оператором, причем упомянутый путь включает в себя начальную позицию и конечную позицию;
энкодер для выработки выходного сигнала энкодера в ответ на качение колеса;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана, причем упомянутый выходной сигнал акселерометра подвержен фиксированному смещению измерения, которое вносит в выходной сигнал акселерометра ошибку измерения ориентации по тангажу; и
процессор для записи исходящего набора данных, включающих в себя множество исходящих показаний энкодера, индексированных по множеству исходящих показаний акселерометра в ответ на качение инструмента для съемки плана от начальной позиции до конечной позиции, и для записи входящего набора данных, включающих в себя множество входящих показаний энкодера, индексированных по множеству входящих показаний акселерометра в ответ на качение инструмента для съемки плана в обратном направлении от конечной позиции до начальной позиции, и для объединения исходящего набора данных с входящим набором данных для выработки контура поверхности по меньшей мере в вертикальной плоскости между начальной позицией и конечной позицией таким образом, чтобы по меньшей мере по существу устранить ошибку измерения ориентации по тангажу на выходе акселерометра.
56. Инструмент для съемки плана согласно концепции 55, дополнительно содержащий:
GPS-датчик для выработки GPS-информации о местоположении; и
упомянутый процессор, выполненный с возможностью записи GPS-информации о местоположении в качестве части исходящего набора данных для получения характеристик исходящего пути GPS и для сравнения входящих GPS-позиций во время движения в обратном направлении по входящему пути для обнаружения того, что входящий путь GPS отклонился от исходящего пути GPS.
57. Способ использования в системе горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу с использованием бурильной колонны, которая продолжается от буровой установки до бурового инструмента, причем упомянутый способ содержит:
считывание выходного сигнала акселерометра, который характеризует ориентацию по тангажу инструмента для съемки плана для качения по поверхности земли вдоль пути, и индексацию выходного сигнала акселерометра в зависимости от расстояния вдоль пути во время качения в прямом направлении от начальной позиции до конечной позиции для выработки исходящего набора данных, причем выходной сигнал акселерометра подвержен фиксированной погрешности измерения, которая вносит ошибку измерения ориентации по тангажу в выходной сигнал акселерометра;
считывание выходного сигнала акселерометра, индексированного по расстоянию вдоль пути, с учетом фиксированного смещения, во время качения в обратном направлении от начальной позиции до конечной позиции для получения исходящего набора данных; и
объединение исходящего набора данных с входящим набором данных для выработки контура поверхности между начальной позицией и конечной позицией таким образом, чтобы по меньшей мере по существу устранить ошибку измерения ориентации по тангажу в выходном сигнале акселерометра.
58. Способ использования в системе горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый способ содержит:
качение инструмента для съемки плана в исходящем направлении от начальной позиции до конечной позиции при считывании выходного сигнала акселерометра, который образует часть инструмента для съемки плана, для получения характеристик его ориентации по тангажу в качестве сбора исходящего набора данных, причем выходной сигнал акселерометра подвержен ошибке измерения ориентации по тангажу, возникающей из-за фиксированной погрешности измерения акселерометра; и
качение инструмента для съемки плана во входящем направлении от начальной позиции до конечной позиции в обратном направлении при считывании выходного сигнала акселерометра для получения характеристик его ориентации по тангажу для сбора исходящего набора данных с выходным сигналом акселерометра с учетом упомянутой ошибки измерения ориентации по тангажу из-за фиксированной погрешности измерения для объединения исходящего набора данных с входящим набором данных таким образом, чтобы устранить фиксированную погрешность измерения при выработке контура поверхности между начальной позицией и конечной позицией.
59. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
первичное колесо, имеющее диаметр первичного колеса, для вращения вокруг оси первичного колеса для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором;
следующее колесо, имеющее диаметр следующего колеса, который является таким же, как диаметр первичного колеса, для вращения вокруг оси следующего колеса во время упомянутого качения;
корпус, который поддерживает первичное колесо и следующее колесо на одной линии для качения в одной плоскости таким образом, чтобы ось следующего колеса была неподвижно расположена на расстоянии от оси первичного колеса и по меньшей мере в целом параллельна ей;
энкодер для выработки выходного сигнала энкодера в ответ на качение первичного колеса; и
акселерометр, поддерживаемый корпусом между осью первичного колеса и осью следующего колеса, причем акселерометр включает в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор для выработки контура поверхности упомянутого пути по меньшей мере в вертикальной плоскости на основе по меньшей мере выходного сигнала энкодера и выходного сигнала акселерометра.
60. Инструмент для съемки плана согласно концепции 59, в котором упомянутый процессор определяет подземный план для бурового инструмента под поверхностью земли относительно упомянутого пути.
61. Инструмент для съемки плана согласно концепции 59 или 60, в котором акселерометр поддерживается в позиции, которая является по меньшей мере приблизительно средней точкой вдоль линии, проходящей между осью первичного колеса и осью следующего колеса.
62. Инструмент для съемки плана согласно концепции 59–61, дополнительно содержащий:
узел рукоятки, включающий в себя дальний конец, имеющий рукоятку, которая выполнена с возможностью взаимодействия с рукой оператора, и проксимальный конец узла рукоятки шарнирно поддерживается упомянутым корпусом для поворота в диапазоне углов поворота вокруг оси поворота, которая параллельна оси первичного колеса и оси следующего колеса для независимого поворота корпуса вместе с первичным колесом и следующим колесом относительно узла рукоятки для перемещения по неровностям местности и наклонной местности.
63. Инструмент для съемки плана согласно концепции 62, в котором ось поворота расположена по меньшей мере приблизительно на одинаковом расстоянии от оси первичного колеса и от оси следующего колеса.
64. Инструмент для съемки плана согласно концепциям 59-63, в котором упомянутый корпус между первичным колесом и следующим колесом, причем каждое колесо соприкасается с ровной поверхностью, находится на расстоянии по меньшей мере 13,97 см (5,5 дюйма) от ровной поверхности.
65. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли по первому пути и второму пути в ответ на перемещение оператором, причем первый путь и второй путь отделены друг от друга препятствием;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения колес, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор для выработки подземного плана для бурового инструмента под поверхностью земли по отношению к первому пути и второму пути на основе выходного сигнала энкодера и выходного сигнала акселерометра, так что подземный план включает в себя первый сегмент ствола скважины, соответствующий первому пути, второй сегмент ствола скважины, соответствующий второму пути, и сшитый сегмент ствола скважины, который соединяет первый сегмент ствола скважины со вторым сегментом ствола скважины.
66. Инструмент для съемки плана согласно концепции 65, в котором первый путь включает в себя первую конечную точку, и второй путь включает в себя вторую конечную точку, так что первая конечная точка находится ближе ко второй конечной точке, чем любая другая точка на первом пути, и вторая конечная точка находится ближе к первой конечной точке, чем любая другая точка на втором пути.
67. Инструмент для съемки плана согласно концепции 66, в котором первая конечная точка находится с разницей по высоте по отношению ко второй конечной точке, и процессор выполнен с возможностью выработки подземного плана с учетом разницы по высоте.
68. Инструмент для съемки плана согласно концепции 67, дополнительно содержащий:
датчик атмосферного давления для выработки выходного сигнала датчика атмосферного давления во время упомянутого качения, и
упомянутый процессор дополнительно выполнен с возможностью определения разности высот на основе выходного сигнала датчика давления в первой конечной точке и второй конечной точке в качестве части выработки подземного плана.
69. Инструмент для съемки плана согласно концепции 66, в котором первая конечная точка находится с боковым смещением относительно второй конечной точки, и процессор выполнен с возможностью выработки подземного плана для учета бокового смещения.
70. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу для выполнения подземной операции с использованием бурильной колонны, длина которой продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
приемник шума для выработки данных шума в полосе частот в ответ на качение; и
процессор для (1) выработки подземного плана для бурового инструмента ниже пути, начиная с начальной позиции, в которой буровой инструмент входит в землю по меньшей мере на основе контура поверхности пути, который определяется с помощью выходного сигнала энкодера и выходного сигнала акселерометра, и (2) корреляции данных шума, измеренных вдоль пути над поверхностью земли, с расстоянием от начальной позиции вдоль подземного плана на основе контура таким образом, чтобы для любой заданной позиции на подземном пути набор коррелированных данных шума соответствовал в верхней позиции на пути, которая находится непосредственно над заданной позицией, чтобы компенсировать разницу между первым расстоянием по подземному плану для достижения заданной позиции и вторым расстоянием вдоль пути для достижения верхней позиции, которая возникает из-за вертикального смещения между подземным планом и путем.
71. Инструмент для съемки плана согласно концепции 70, в котором подземный план включает в себя подземный вертикальный контур, и упомянутый процессор выполнен с возможностью дополнительной компенсации дополнительного вертикального смещения из-за подземного вертикального контура.
72. Инструмент для съемки плана, предназначенный для использования с системой, в которой буровая установка продвигает буровой инструмент, который передает электромагнитный сигнал определения местоположения для горизонтально направленного бурения через породу, причем система включает в себя множество устройств слежения, позиционируемых на поверхности земли для отслеживание бурового инструмента под землей на основе приема электромагнитного сигнала определения местоположения, при этом инструмент для съемки плана содержит:
одно или несколько колес для качения вдоль пути на поверхности земли в ответ на действия оператора;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес; и
процессор для измерения пройденного расстояния вдоль упомянутого пути на основе выходного сигнала энкодера и, в ответ на обнаружение того, что инструмент для съемки плана прошел определенное расстояние, выработки указания для оператора разместить одно из упомянутых устройств слежения на пути.
73. Инструмент для съемки плана согласно концепции 72, дополнительно содержащий
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана; и
упомянутый процессор дополнительно выполнен с возможностью определения контура поверхности упомянутого пути в вертикальной плоскости на основе выходного сигнала энкодера и выходного сигнала акселерометра и выработки дополнительного указателя для размещения одного из устройств слежения на пути на основе контура.
74. Инструмент для съемки плана, предназначенный для использования с системой, в которой буровая установка продвигает буровой инструмент, который передает электромагнитный сигнал определения местоположения для горизонтально направленного бурения через породу, причем система включает в себя множество устройств слежения, позиционируемых на поверхности земли для отслеживание бурового инструмента под землей на основе приема электромагнитного сигнала определения местоположения, причем инструмент для съемки плана содержит:
одно или несколько колес для качения вдоль пути на поверхности земли в ответ на действия оператора;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор, выполненный с возможностью определения контура поверхности упомянутого пути в вертикальной плоскости на основе выходного сигнала энкодера и выходного сигнала акселерометра и для выработки указателя для размещения одного из устройств слежения на пути на основе контура.
75. Инструмент для съемки плана, предназначенный для использования с системой, в которой буровая установка продвигает буровой инструмент, который передает электромагнитный сигнал определения местоположения для горизонтального направленного бурения через породу, причем система включает в себя множество устройств слежения, позиционируемых на поверхности земли для отслеживания бурового инструмента под землей на основе приема электромагнитного сигнала определения местоположения, при этом инструмент для съемки плана содержит:
одно или несколько колес для качения вдоль пути на поверхности земли в ответ на действия оператора;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана; и
пользовательский интерфейс для обслуживания оператора для обозначения по меньшей мере одной позиции вдоль пути, на котором оператор размещает конкретное одно из упомянутых устройств слежения, и для ввода целевой глубины для бурения в целевой позиции инструмента непосредственно под конкретным устройством слежения; и
процессор для определения контура поверхности пути в вертикальной плоскости на основе выходного сигнала энкодера и выходного сигнала акселерометра и для выработки подземного плана для бурового инструмента под поверхностью земли, который проходит через целевую позицию.
76. Инструмент для съемки плана согласно концепции 75, в котором пользовательский интерфейс выполнен с возможностью приема целевого тангажа для бурового инструмента в целевом местоположении, и процессор выполнен с возможностью определения подземного плана таким образом, чтобы буровой инструмент достигал целевой позиции при целевом тангаже.
77. Инструмент для съемки плана согласно концепции 75 или 76, в котором процессор определяет целевой тангаж для бурового инструмента в целевой позиции на основе контура и целевой позиции.
78. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу для выполнения подземной операции с использованием бурильной колонны, длина которой продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
приемник шума для выработки данных шума в полосе частот в ответ на качение; и
процессор для (1) выработки подземного плана для бурового инструмента ниже пути, начиная с начальной позиции, в которой буровой инструмент входит в землю по меньшей мере на основе контура поверхности пути, который определяется с помощью выходного сигнала энкодера и выходного сигнала акселерометра и (2) выработки набора выбранных частот для использования вдоль подземного пути, коррелированного с расстоянием, на основе данных шума, измеренных на поверхности земли.
79. Инструмент для съемки плана согласно концепции 78, в котором процессор выполнен с возможностью автоматического выбора набора частот.
80. Инструмент для съемки плана согласно концепции 78 или 79, в котором процессор вырабатывает набор выбранных частот на основе одного или нескольких пользовательских выборов.
81. Инструмент для съемки плана, предназначенный для съемки плана перемещения бурового инструмента во время операции подземного бурения, причем буровой инструмент образует часть системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу с помощью бурильной колонны, которая продолжается от буровой установки к буровому инструменту, причем упомянутый инструмент для съемки плана содержит:
процессор, выполненный с возможностью разработки подземного плана от текущей точки до целевой конечной точки путем максимизации объема линейного бурения для бурового инструмента от текущей точки до целевой конечной точки.
82. Инструмент для съемки плана согласно концепции 81, в котором процессор выполнен с возможностью разработки начального участка подземного плана, который является изогнутым, для размещения бурового инструмента в направлении движения для прибытия бурового инструмента в заданную конечную точку по линейному пути.
83. Инструмент для съемки плана согласно концепции 81 или 82, в котором процессор выполнен с возможностью итеративной разработки начального участка подземного плана и конечного участка подземного плана таким образом, чтобы конечный участок и конечный участок продолжались по направлению друг к другу, причем прямое направление движения начального участка и обратное направление движения конечного участка выровнены для соединения с помощью линейного участка таким образом, чтобы бурильный инструмент прибывал в целевую конечную точку с точно определенной ориентацией по рысканию и точно определенной ориентацией по тангажу.
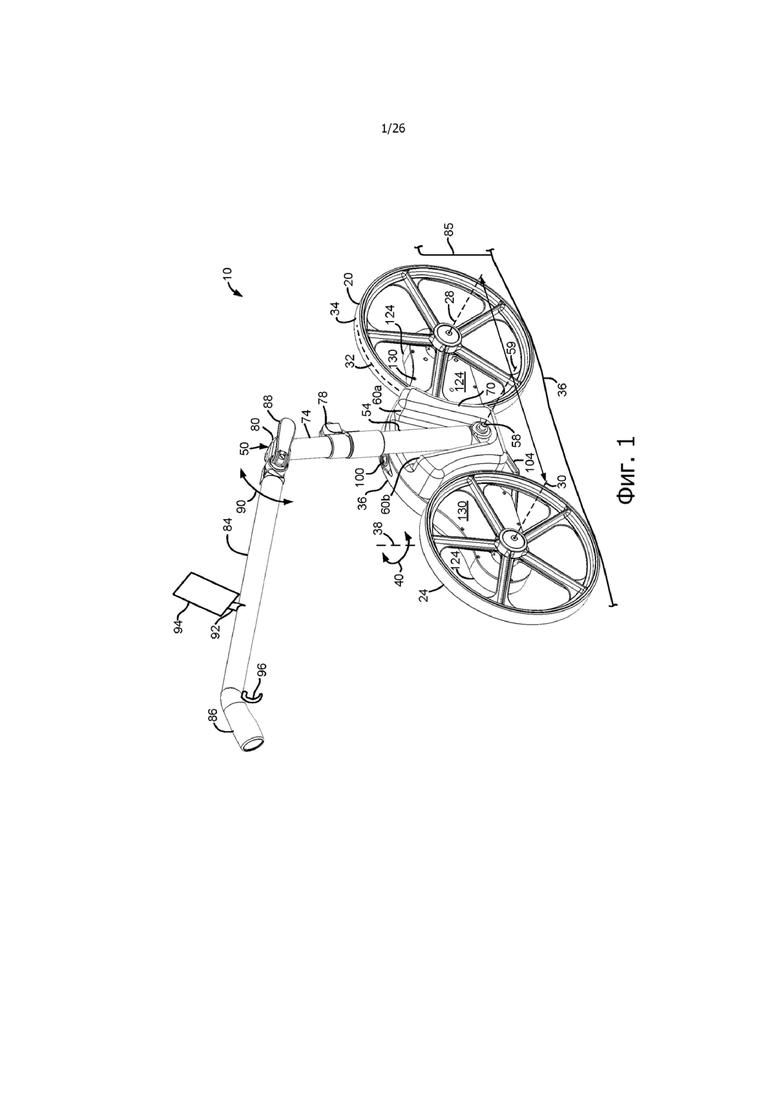
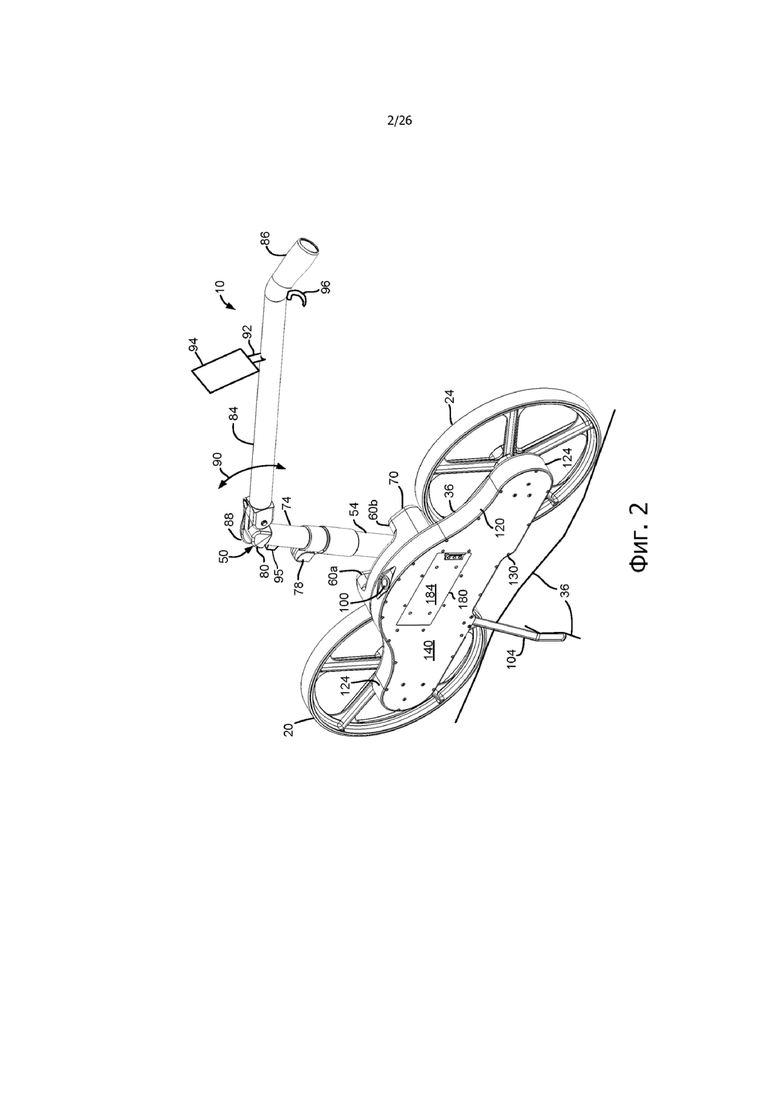
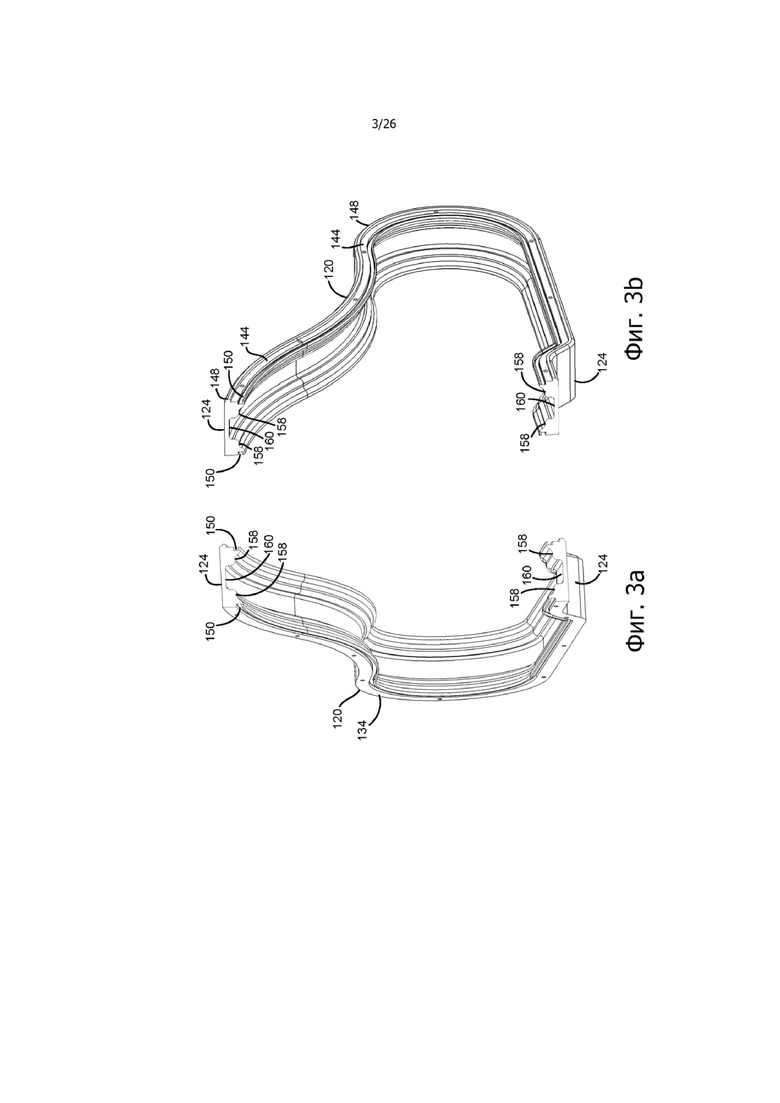
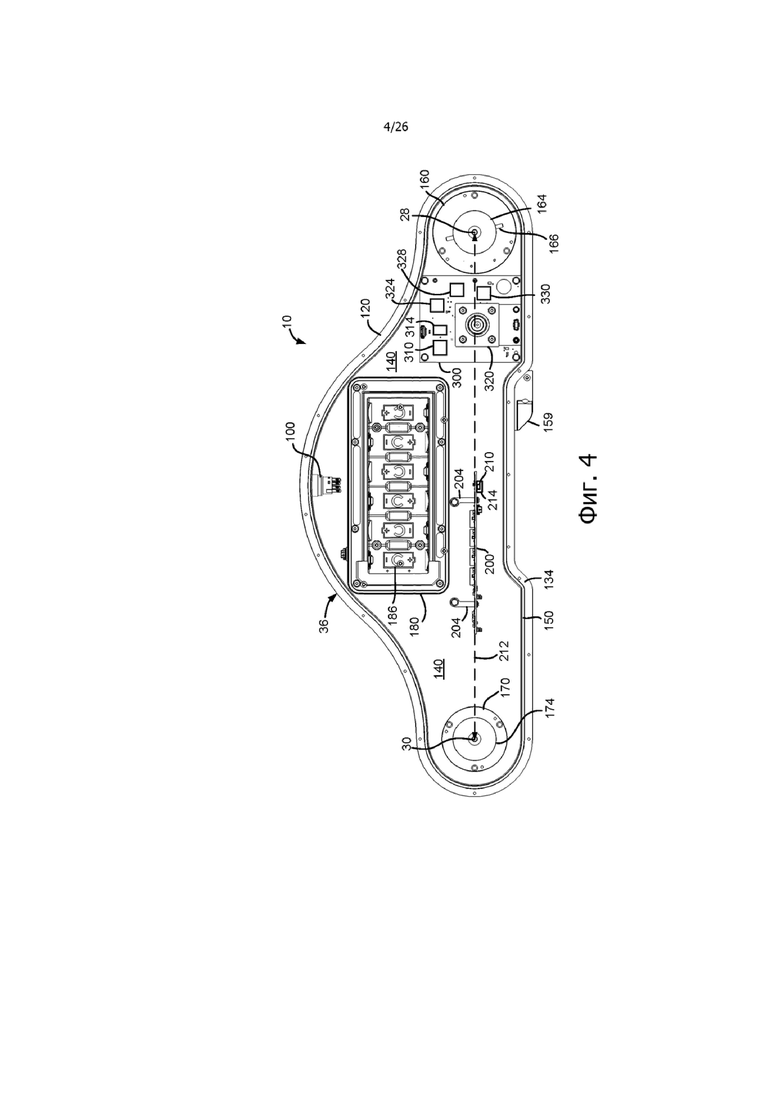
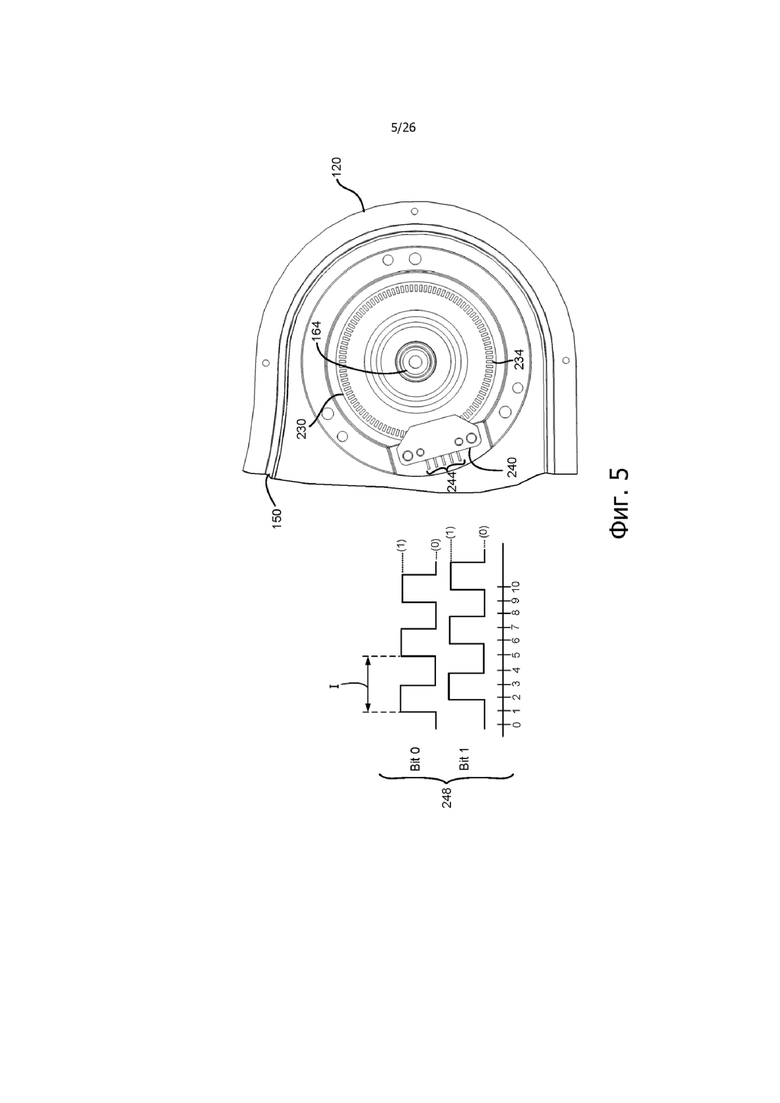
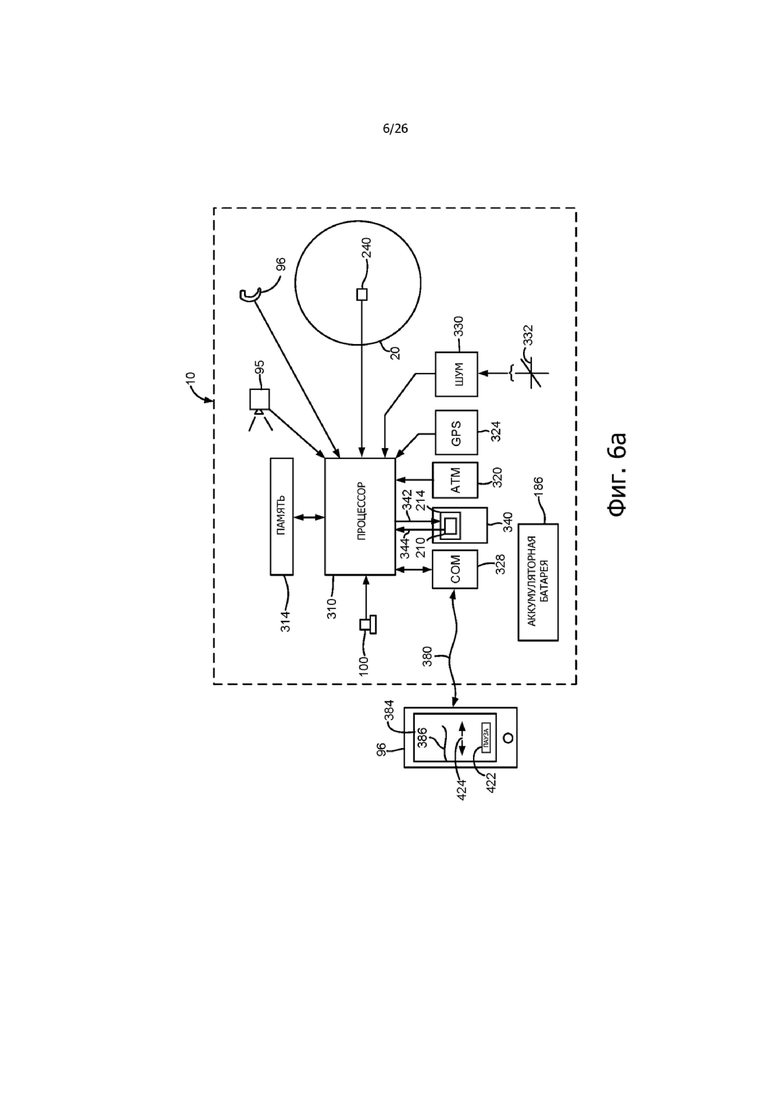
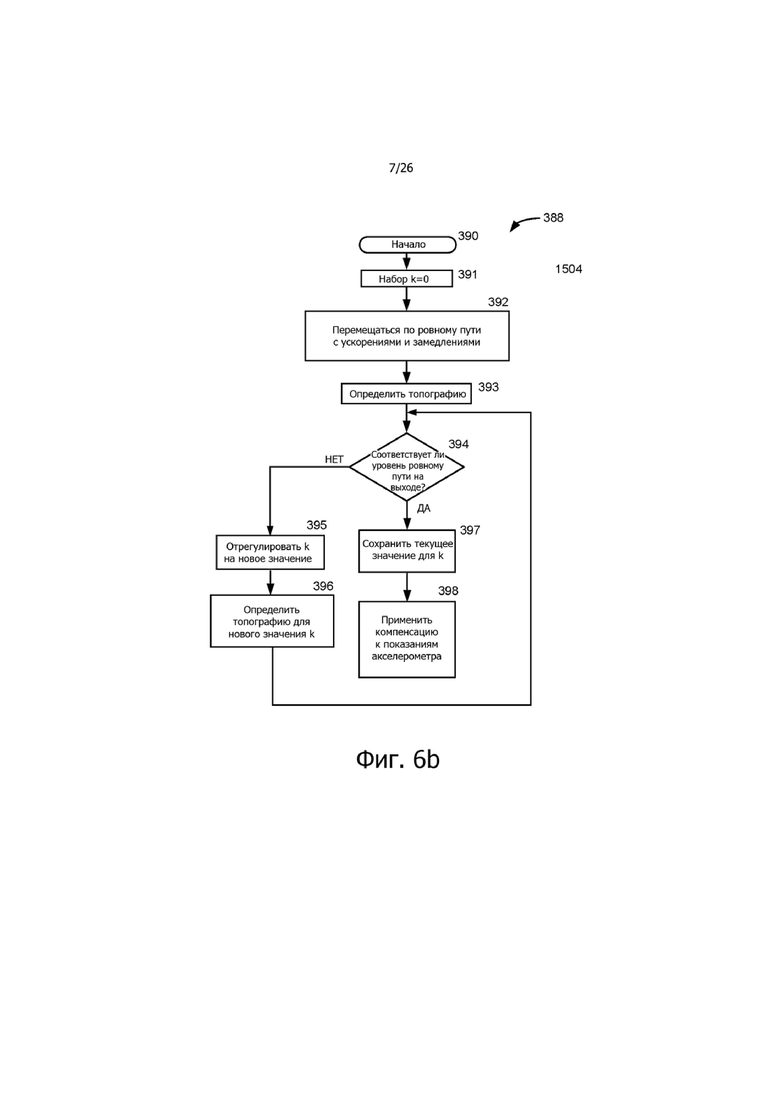
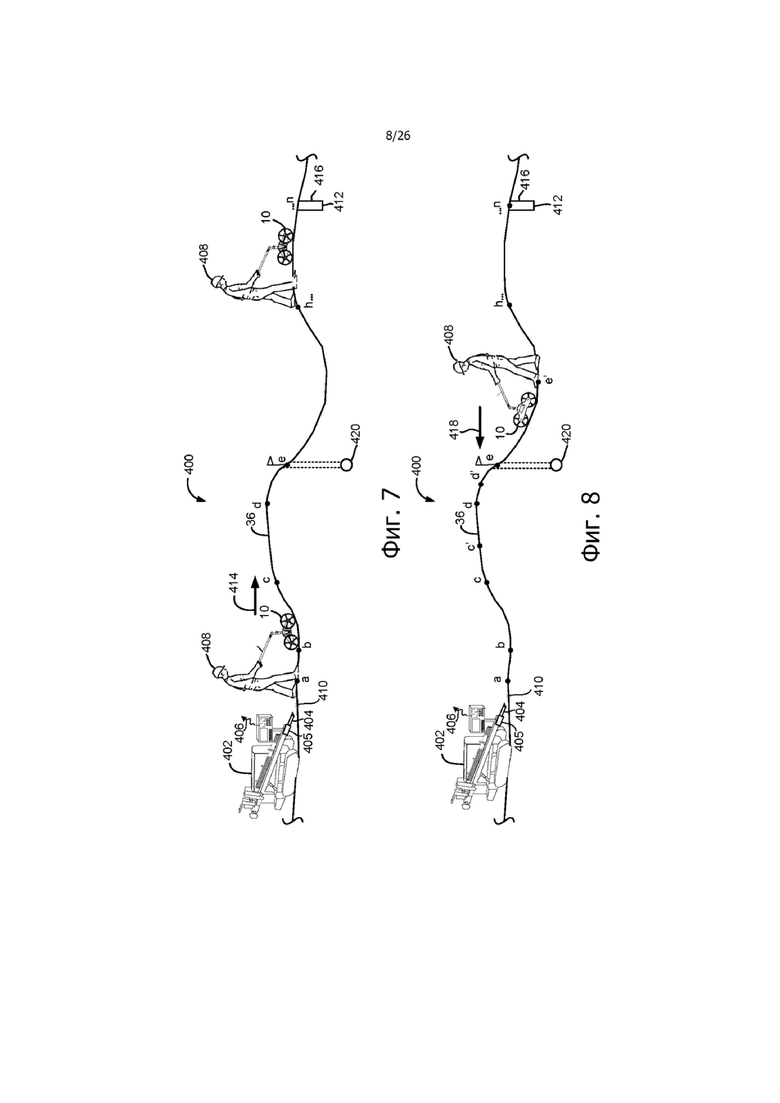
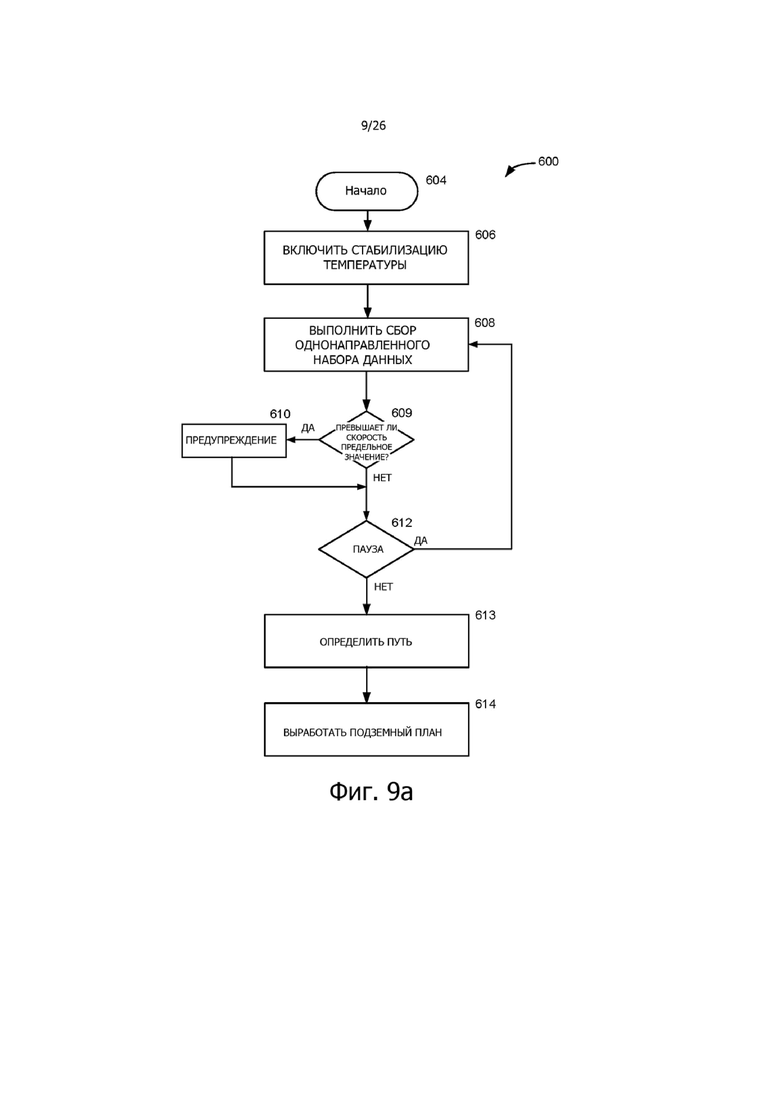
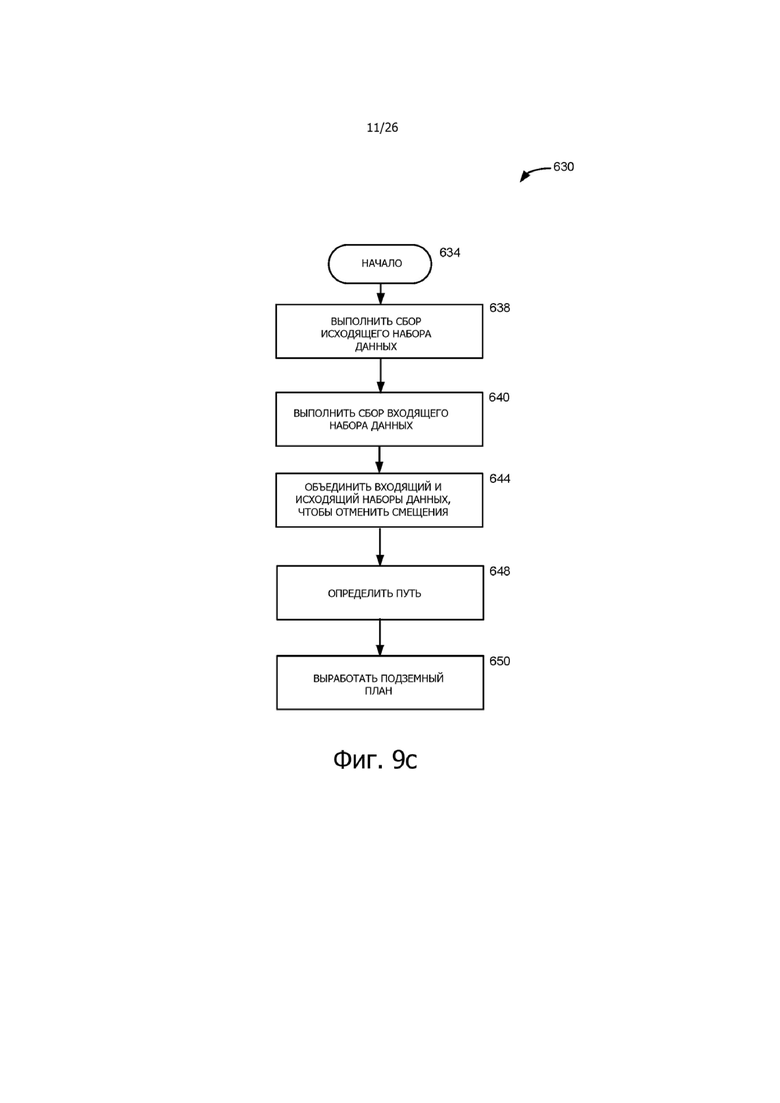
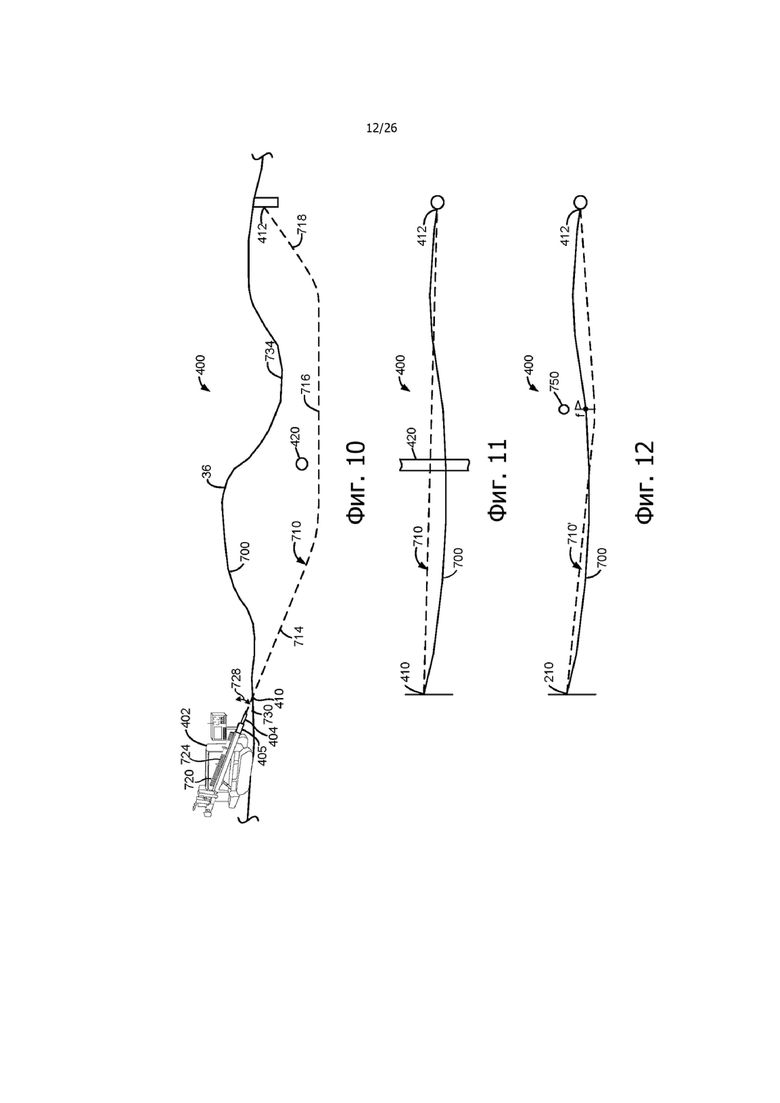
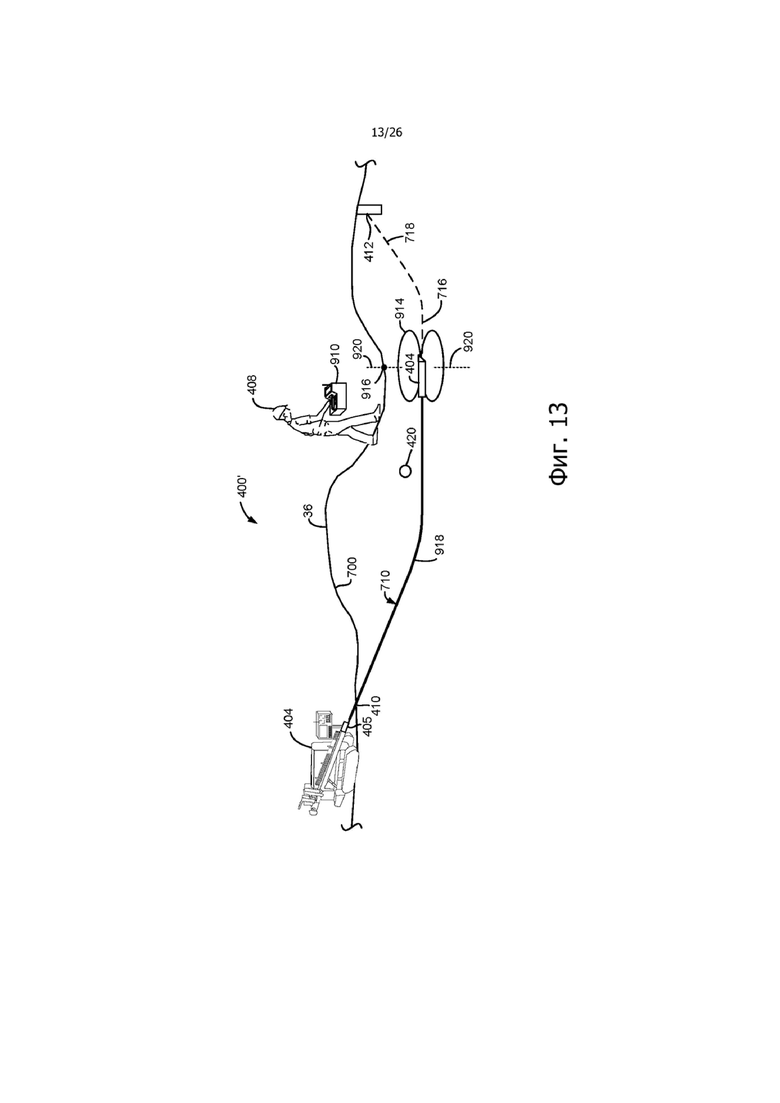
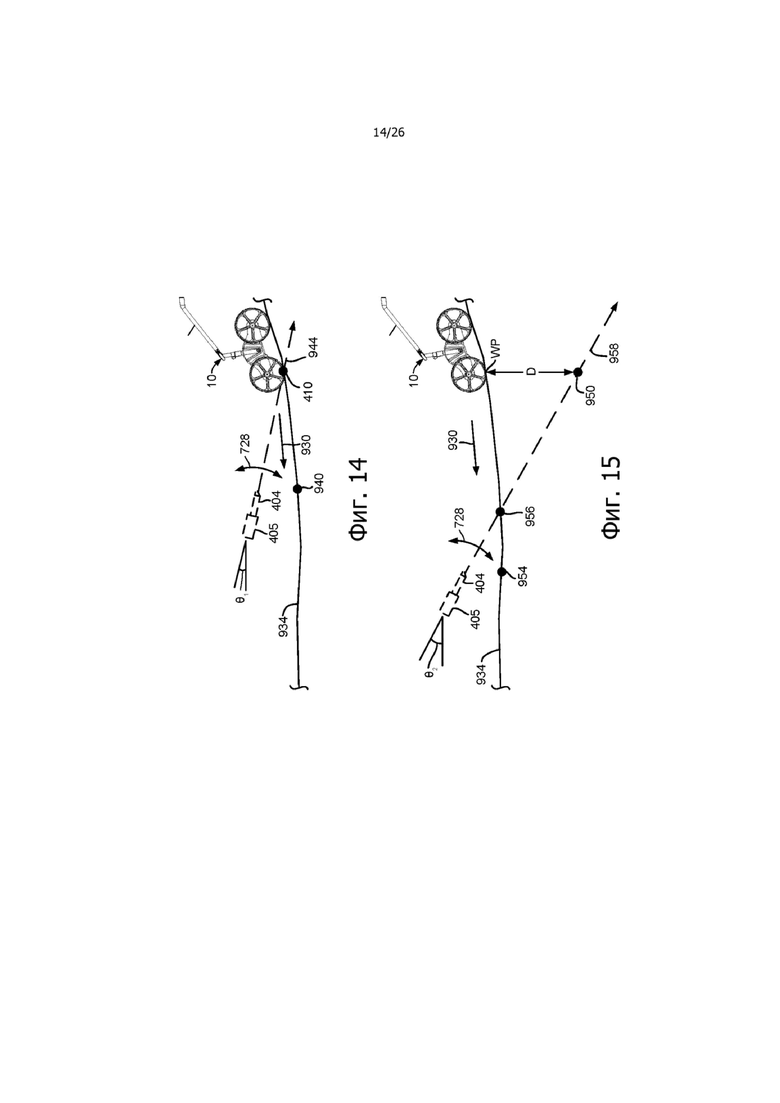
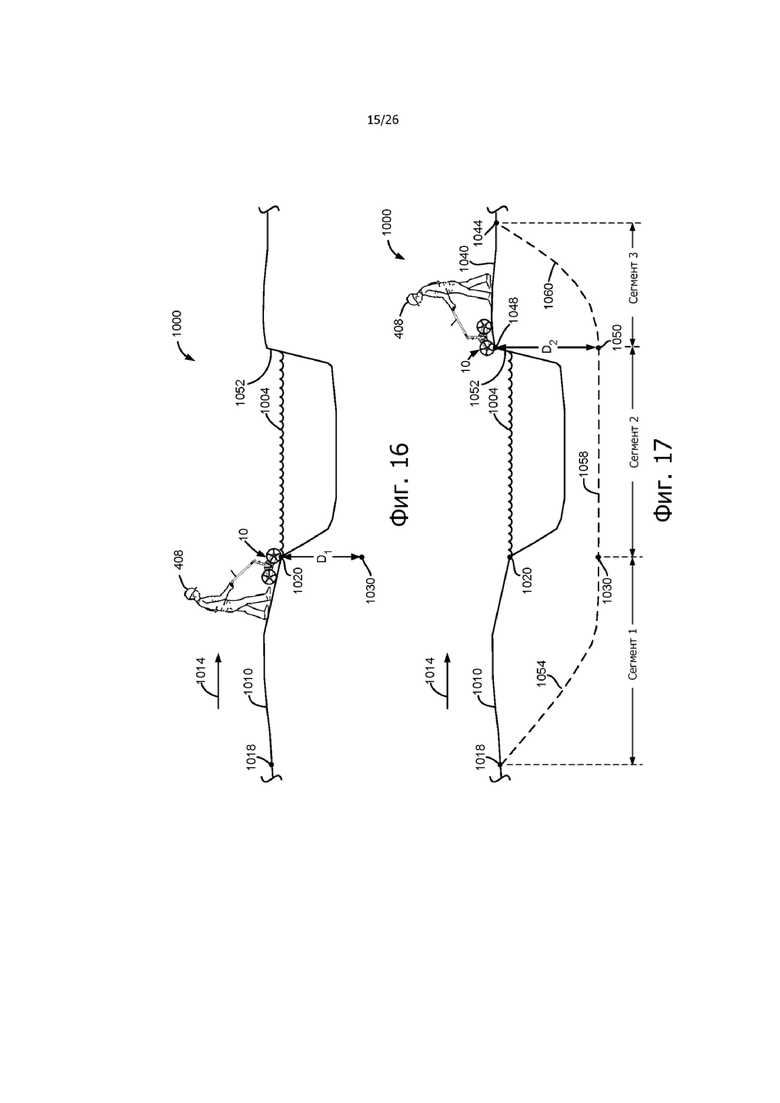
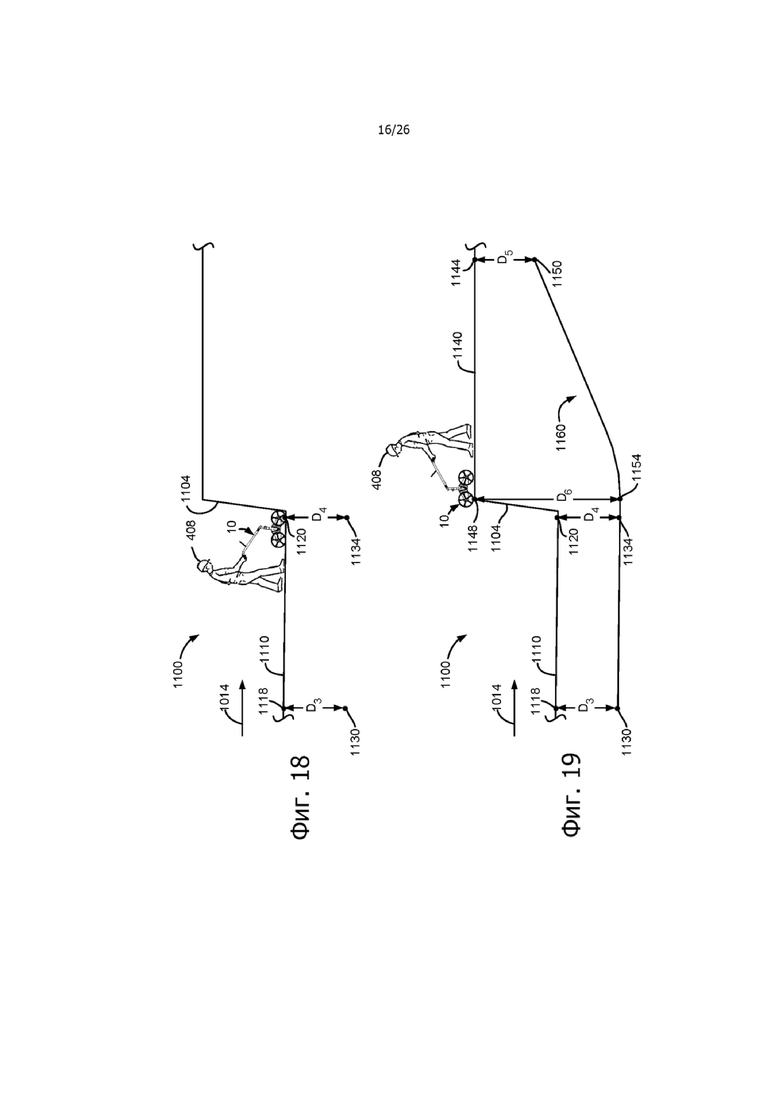
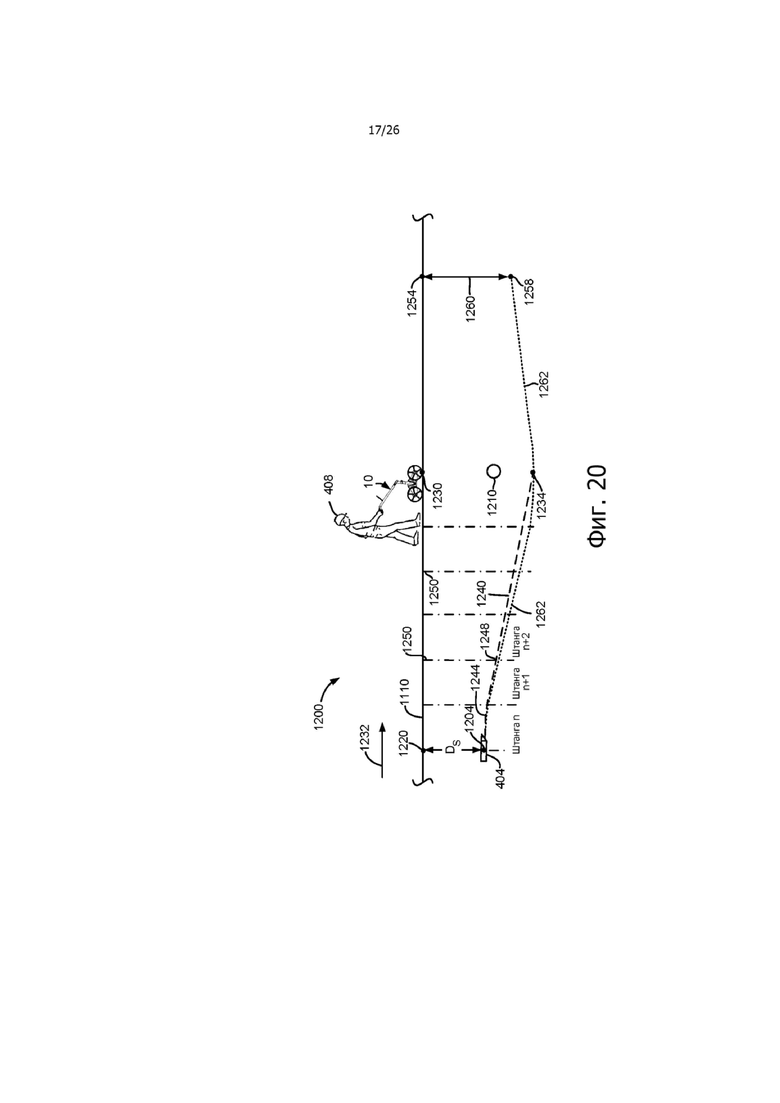
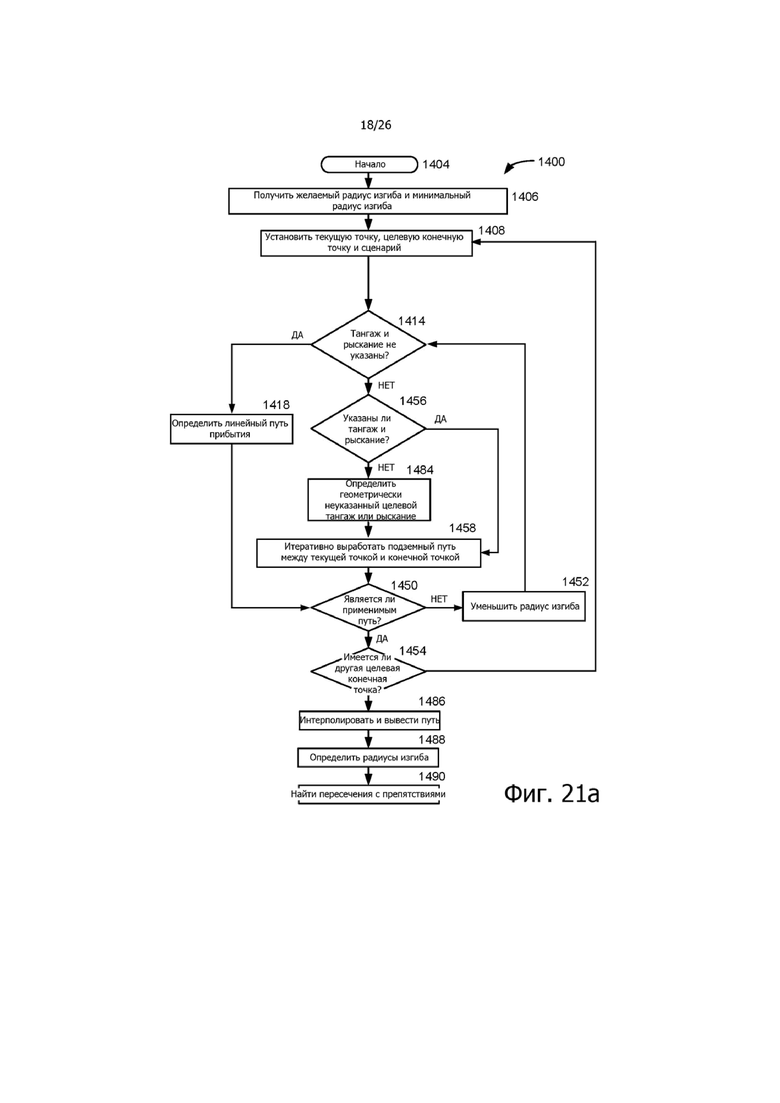
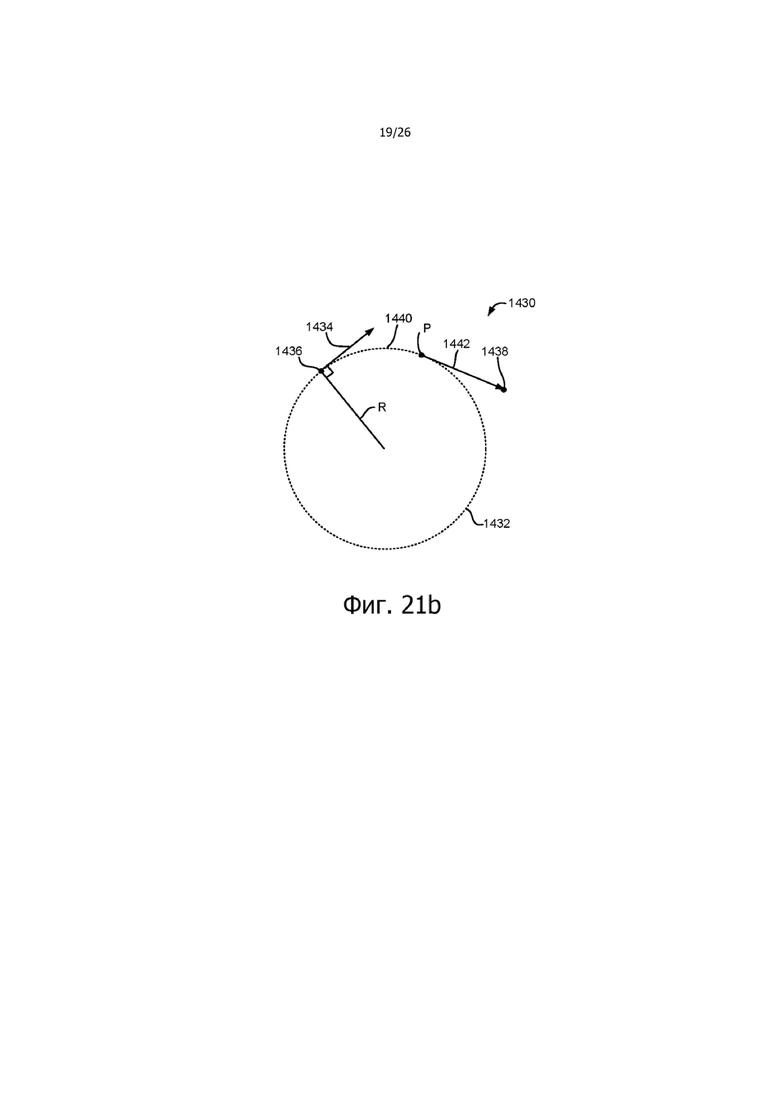
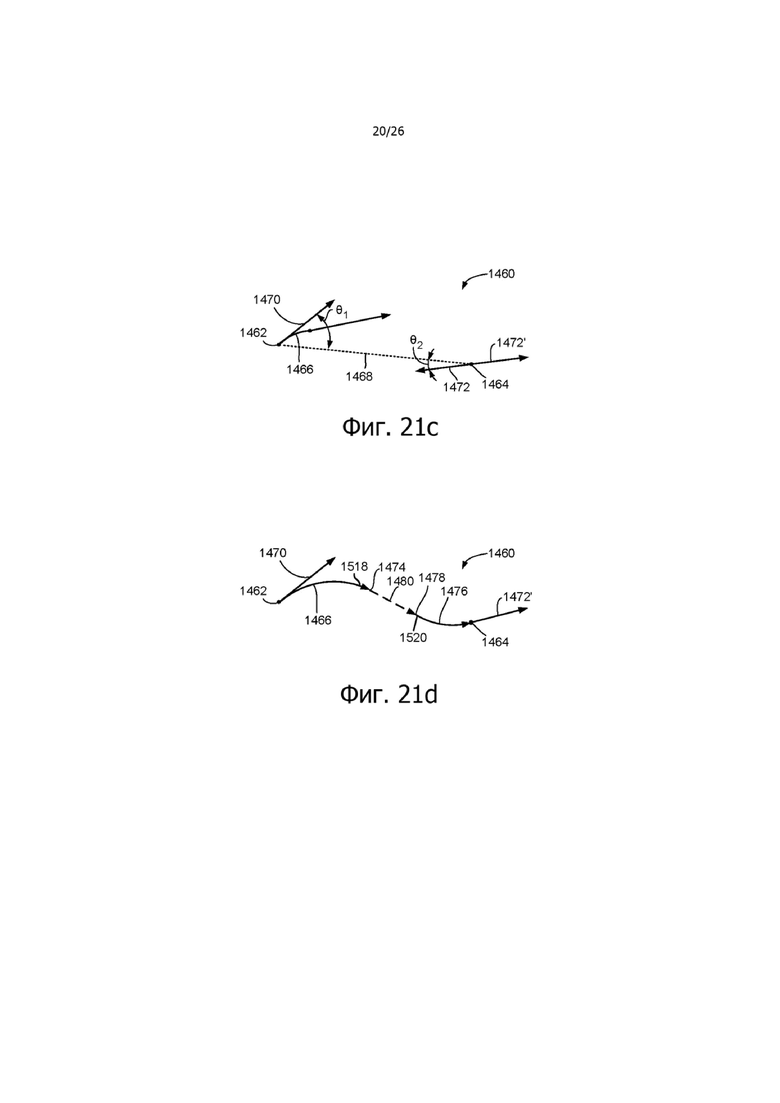
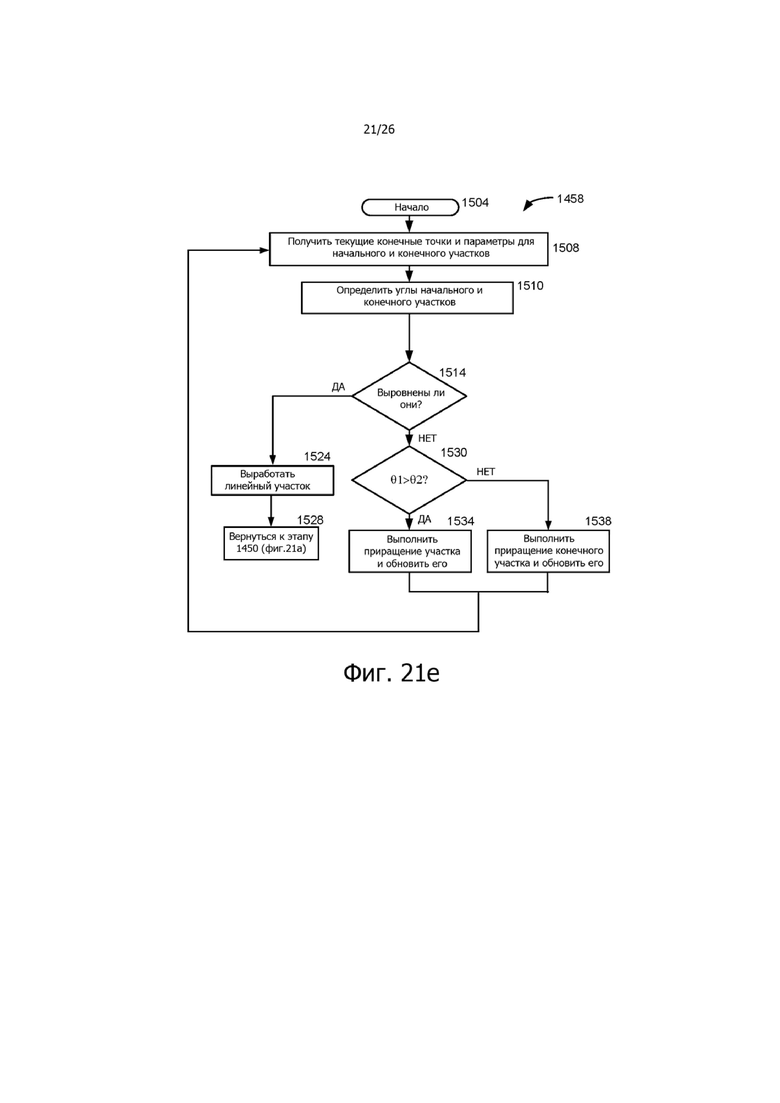
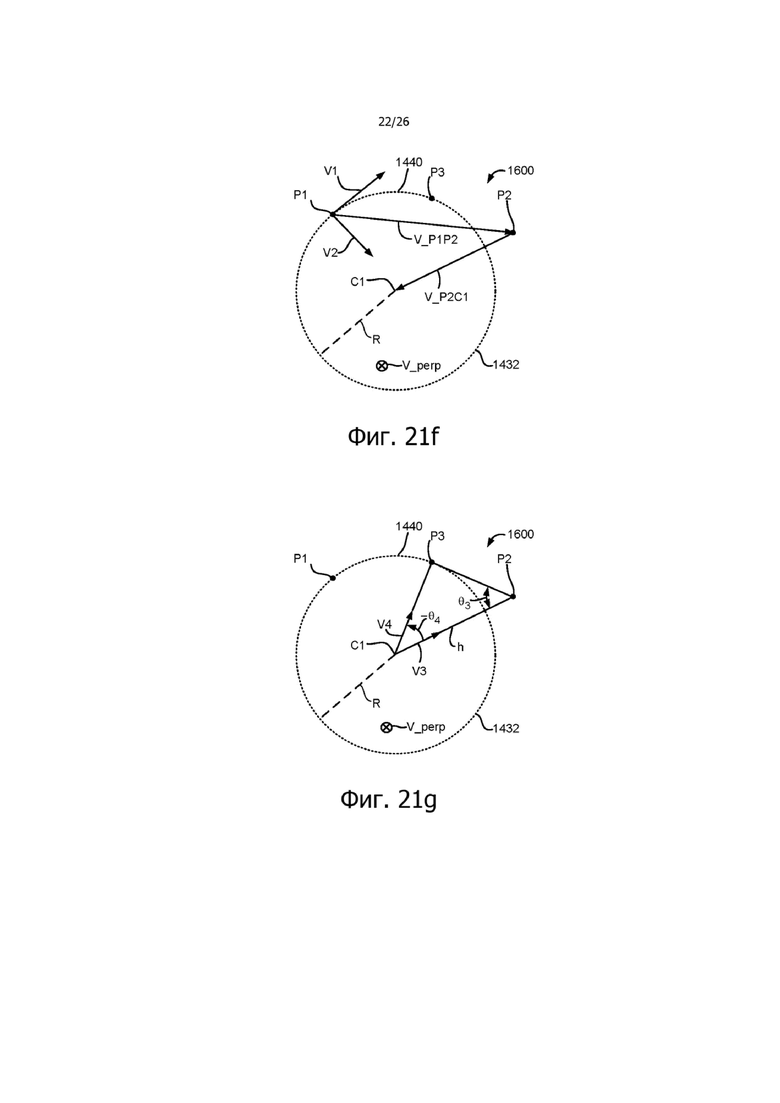
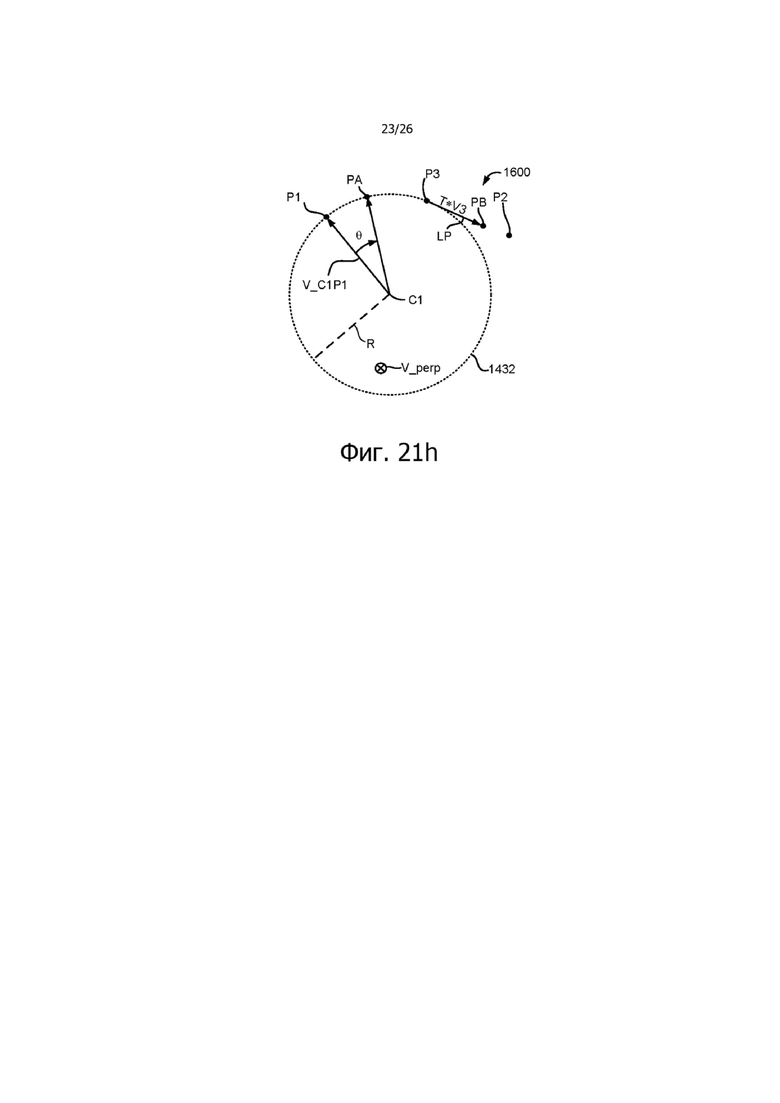
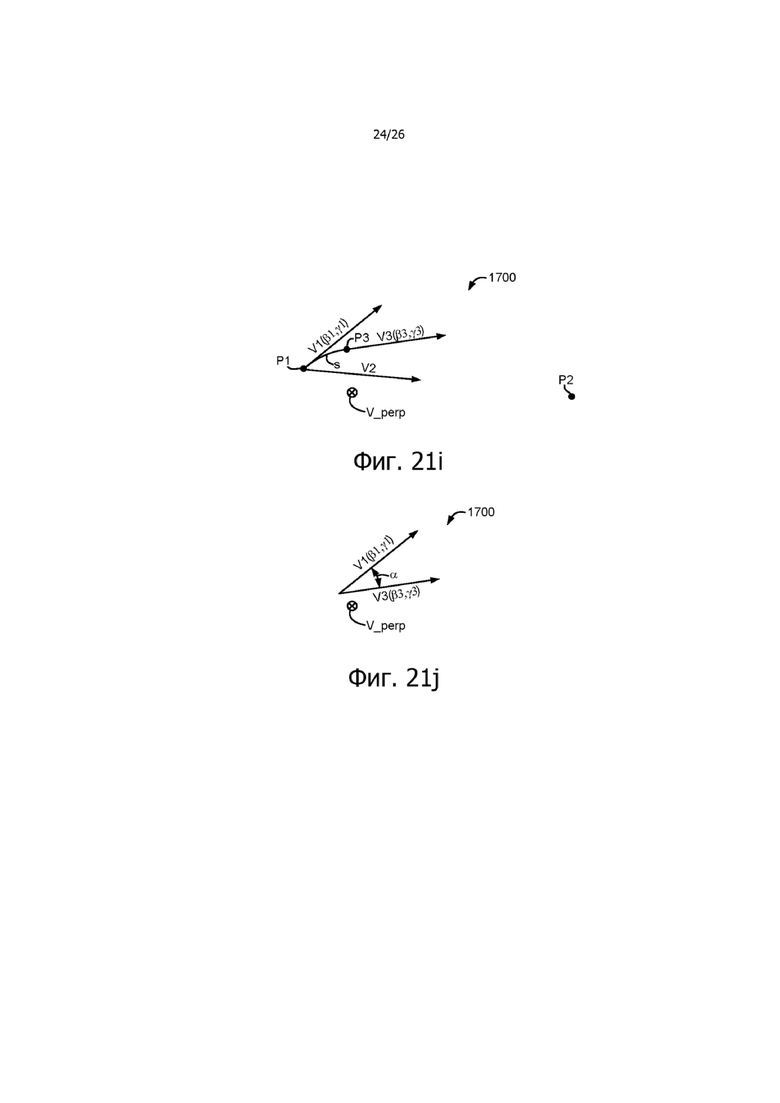
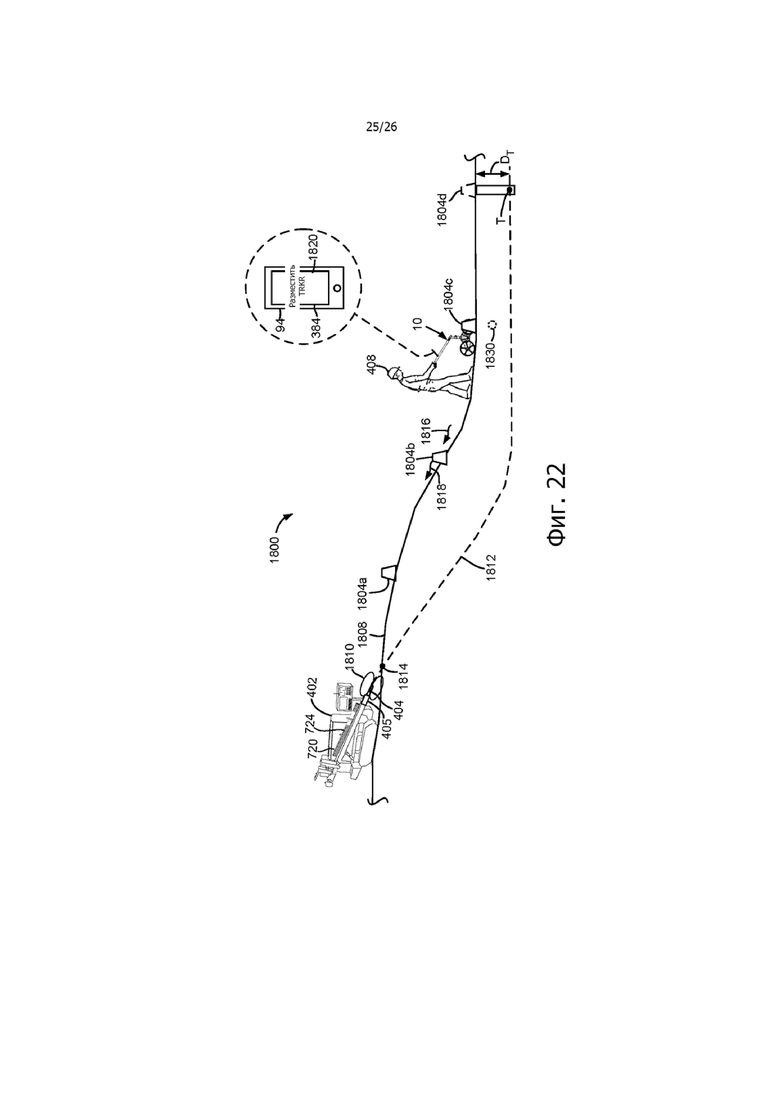
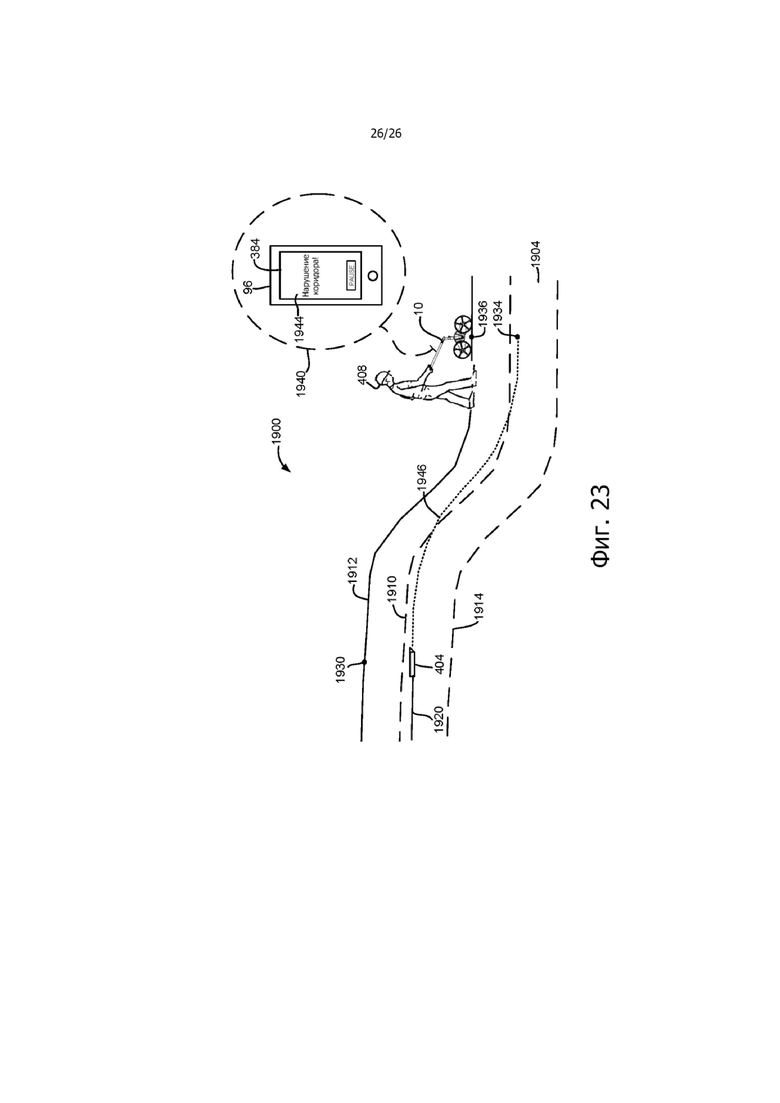
Группа изобретений относится к области съемки плана бурения в система горизонтального направленного бурения. Технический результат – обеспечение направления бурения в обход препятствий к желаемым целевым точкам во время бурения в реальном времени. Инструмент для съемки плана планирует перемещение бурового инструмента для операции подземного бурения. Инструмент для съемки плана включает в себя одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором, чтобы определить контур поверхности и выработать направление движения бурового инструмента для достижения заданной позиции. Планирование может дополнительно основываться на точках пути. Инструмент для съемки плана можно поворачивать в одном или двух направлениях для определения контура поверхности. Двунаправленное перемещение устраняет фиксированное смещение акселерометра. Сшивание путей используется для съемки плана вокруг препятствий. Инструмент для съемки плана позволяет облегчить размещение устройства слежения. Инструмент для съемки плана позволяет проводить сбор информации о шуме для целей выбора частоты. Описанный способ максимально оптимизирует линейное бурение при использовании подземного плана. Компенсация и/или предупреждения предусмотрены для неустойчивого, быстрого и медленного перемещения инструмента для съемки плана при измерении контура поверхности. 20 н. и 63 з.п. ф-лы, 23 ил., 1 табл.
1. Инструмент для съемки плана, предназначенный для съемки плана перемещения бурового инструмента во время операции подземного бурения, причем буровой инструмент образует часть системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу с помощью бурильной колонны, которая продолжается от буровой установки к буровому инструменту, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором, причем путь по меньшей мере включает в себя: (1) начальную позицию на поверхности рядом с текущей позицией бурового инструмента, причем буровой инструмент находится в текущей ориентации, и (2) следующую позицию на поверхности рядом с заданной пользователем целевой позицией для бурового инструмента, которая находится впереди текущей позиции;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес между начальной позицией на поверхности и следующей позицией на поверхности;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения колес вдоль пути, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор для приема пользовательского ввода, который точно определяет целевую позицию перед буровым инструментом, причем буровой инструмент находится в текущей позиции и текущей ориентации, и для выработки указаний направления для бурового инструмента для достижения целевой позиции на основе текущей позиции, текущей ориентации, выходного сигнала энкодера и выходного сигнала акселерометра.
2. Инструмент для съемки плана по п.1, в котором указание направления включает в себя по меньшей мере ориентацию по среднему углу тангажа, которую необходимо поддерживать для достижения целевого местоположения.
3. Инструмент для съемки плана по п.1, в котором начальная позиция на поверхности находится непосредственно над буровым инструментом в текущей позиции.
4. Инструмент для съемки плана по п.1, в котором следующая позиция на поверхности находится непосредственно над заданной позицией.
5. Инструмент для съемки плана по п.1, в котором следующая позиция на поверхности находится в точке, где буровой инструмент должен выйти из земли.
6. Инструмент для съемки плана по п.1, в котором целевая позиция является промежуточной позицией в земле вдоль всего подземного пути перед выходом бурового инструмента из земли.
7. Инструмент для съемки плана по п.1, в котором указание направления по меньшей мере указывает целевую ориентацию по тангажу для достижения целевой позиции.
8. Инструмент для съемки плана по п.1, в котором процессор выполнен с возможностью выработки дополнительных указаний, ассоциированных по меньшей мере с одной точкой поверхности между начальной позицией на поверхности и следующей позицией на поверхности.
9. Инструмент для съемки плана по п.8, в котором дополнительное указание направления для упомянутой точки поверхности точно определяет по меньшей мере желаемую глубину, ассоциированную с точкой поверхности.
10. Инструмент для съемки плана по п.9, в котором дополнительное указание направления для упомянутой точки поверхности точно определяет желаемый тангаж, ассоциированный с точкой поверхности.
11. Инструмент для съемки плана по п.1, в котором процессор выполнен с возможностью выработки дополнительных указаний, ассоциированных с множеством точек поверхности, разнесенных между начальной позицией на поверхности и следующей позицией на поверхности.
12. Инструмент для съемки плана по п.11, в котором дополнительное указание направления по меньшей мере включает в себя желаемую глубину, ассоциированную с каждой из точек поверхности.
13. Инструмент для съемки плана по п.12, в котором дополнительное указание направления точно определяет желаемый тангаж, ассоциированный с каждой из точек поверхности.
14. Инструмент для съемки плана по п.11, в котором точки поверхности разнесены по поверхности на равное расстояние приращения.
15. Инструмент для съемки плана по п.1, в котором упомянутый процессор выполнен с возможностью выработки предупреждения о скорости в ответ на выходной сигнал энкодера, указывающий скорость, которая превышает пороговую скорость.
16. Инструмент для съемки плана по п.1, в котором упомянутый процессор дополнительно вырабатывает указание направления на основе минимального радиуса изгиба упомянутой бурильной колонны.
17. Инструмент для съемки плана по п.14, в котором бурильная колонна состоит из ряда съемно присоединяемых буровых штанг, причем каждая буровая штанга включает в себя длину штанги для продолжения под землей способом штанга за штангой для определения конечных точек буровых штанг под землей, и точки поверхности разнесены друг от друга на основе проецирования конечных точек буровых штанг на поверхность земли.
18. Инструмент для съемки плана по п.17, в котором указание направления включает в себя целевую глубину и целевой тангаж для каждой конечной точки буровой штанги.
19. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения колес, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор для выработки подземного плана для бурового инструмента под поверхностью земли относительно упомянутого пути на основе выходного сигнала энкодера и выходного сигнала акселерометра.
20. Инструмент для съемки плана по п.19, в котором упомянутый процессор определяет контур поверхности упомянутого пути в вертикальной плоскости.
21. Инструмент для съемки плана по п.19, в котором упомянутый процессор выполнен с возможностью выработки предупреждения о скорости в ответ на выходной сигнал энкодера, указывающий скорость, которая превышает пороговую скорость.
22. Инструмент для съемки плана по п.19, в котором упомянутый процессор вырабатывает подземный план в ответ на указание оператора относительно того, что завершен сбор выходного сигнала энкодера и выходного сигнала акселерометра вдоль пути от начальной позиции до конечной позиции.
23. Инструмент для съемки плана по п.19, в котором упомянутый процессор дополнительно вырабатывает подземный план на основе минимального радиуса изгиба упомянутой бурильной колонны.
24. Инструмент для съемки плана по п.19, в котором подземный план представляет собой план ствола скважины, который продолжается от позиции входа до позиции выхода.
25. Инструмент для съемки плана по п.19, в котором подземный план представляет собой сегмент ствола скважины, который представляет собой не более чем участок общего подземного пути, который продолжается от позиции входа до позиции выхода.
26. Инструмент для съемки плана по п.25, в котором сегмент ствола скважины представляет собой начальный участок входа, начинающийся с позиции входа, которая служит начальной позицией, и заканчивающийся в промежуточной позиции.
27. Инструмент для съемки плана по п.25, в котором сегмент ствола скважины представляет собой участок выхода, начинающийся от промежуточной позиции и заканчивающийся в позиции выхода, которая служит конечной позицией.
28. Инструмент для съемки плана по п.25, в котором сегмент ствола скважины представляет собой промежуточный участок, который не включает в себя позицию входа или позицию выхода.
29. Инструмент для съемки плана по п.19, в котором упомянутое одно или несколько колес содержит пару рядных колес.
30. Инструмент для съемки плана по п.19, дополнительно содержащий:
датчик GPS для выработки GPS-информации о местоположении; и
упомянутый процессор, выполненный с возможностью функционирования в режиме измерения на основе выходного сигнала акселерометра и выходного сигнала энкодера и в режиме GPS на основе GPS-информации о местоположении.
31. Инструмент для съемки плана по п.30, в котором упомянутый процессор выполнен с возможностью переключения из режима измерения в режим GPS на основе выходного сигнала акселерометра, указывающего то, что инструмент для съемки плана катят по шероховатой поверхности, так что колеса по меньшей мере периодически теряют контакт с поверхность земли.
32. Система горизонтального направленного бурения, содержащая:
буровой инструмент для формирования ствола скважины;
буровую установку для перемещения бурового инструмента; и
инструмент для съемки плана, содержащий:
одно или несколько колес для качения по поверхности земли, реагирующих на перемещение, осуществляемое оператором, вдоль пути,
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес,
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения колес вдоль пути, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор для выработки подземного плана для бурового инструмента под поверхностью земли относительно упомянутого пути на основе выходного сигнала энкодера и выходного сигнала акселерометра.
33. Система по п.32, в которой упомянутый процессор расположен в инструменте для съемки плана.
34. Система по п.32, в которой упомянутый процессор удаленно расположен от инструмента для съемки плана.
35. Система по п.34, в которой упомянутый процессор расположен на буровой установке.
36. Система по п.32, в которой упомянутый процессор вырабатывает подземный план в ответ на указание оператора относительно того, что завершен сбор данных вдоль пути от начальной позиции до конечной позиции.
37. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу в прямом направлении с использованием бурильной колонны, которая продолжается от буровой установки к буровому инструменту, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана;
пользовательский интерфейс для приема ввода оператора, назначающего одну или несколько позиций вдоль пути; и
процессор для выработки подземного плана для бурового инструмента под поверхностью земли по отношению к упомянутому пути на основе выходного сигнала энкодера, выходного сигнала акселерометра и обозначенных позиций.
38. Инструмент для съемки плана по п.37, в котором конкретная обозначенная позиция определяет начальную точку пути под землей, которая находится непосредственно внизу на заданной глубине и через которую должен проходить буровой инструмент, и подземный план по меньшей мере продолжается от позиции входа по пути, где буровой инструмент входит в грунт, до начальной точки подземного пути.
39. Инструмент для съемки плана по п.38, в котором упомянутый процессор определяет позицию отступа для буровой установки на пути в обратном направлении, противоположном прямому направлению, из конкретной обозначенной позиции по меньшей мере на основе контура поверхности пути в вертикальной плоскости, которая характеризуется выходным сигналом энкодера и выходным сигналом акселерометра между позицией отступа и конкретной обозначенной позицией.
40. Инструмент для съемки плана по п.39, в котором процессор дополнительно определяет позицию входа для бурового инструмента, чтобы пройти через поверхность земли между позицией отступа и конкретной обозначенной позицией по меньшей мере на основе контура поверхности пути.
41. Инструмент для съемки плана по п.37, в котором конкретная обозначенная позиция определяет точку входа, в которой буровой инструмент должен пройти через поверхность земли.
42. Инструмент для съемки плана по п.40, в котором буровая установка включает в себя регулируемый диапазон угла наклона зубчатой рейки для бурового инструмента для входа в землю, и процессор определяет конкретный угол зубчатой рейки в пределах диапазона углов наклона зубчатой рейки.
43. Инструмент для съемки плана по п.37, в котором конкретная обозначенная позиция определяет препятствие, которое следует избегать с помощью плана ствола скважины.
44. Инструмент для съемки плана по п.43, в котором препятствие помечается с указанием направления и расстояния смещения от обозначенной позиции на основе взаимодействия оператора с пользовательским интерфейсом.
45. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент в прямом направлении через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли вдоль пути в обратном направлении, противоположном прямому направлению, начиная с заданной позиции и в ответ на перемещение, осуществляемое оператором;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес в обратном направлении;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения в обратном направлении, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор для выработки позиции отступа для буровой установки по пути в обратном направлении от заданной позиции на основе контура поверхности пути в обратном направлении, что характеризуется выходным сигналом энкодера и выходным сигналом акселерометра.
46. Инструмент для съемки плана по п.45, в котором заданной позицией является позиция входа для бурового инструмента для прохождения через поверхность земли.
47. Инструмент для съемки плана по п.45, в котором заданная позиция обозначает позицию под землей непосредственно внизу, которая находится на заданной глубине и через которую должен проходить буровой инструмент во время бурения.
48. Инструмент для съемки плана по п.47, в котором процессор дополнительно выполнен с возможностью определения позиции входа для бурового инструмента для ввода в землю между позицией отступа и заданной позицией по меньшей мере на основе контура поверхности пути.
49. Способ определения позиции отступа для настройки буровой установки, которая образует часть системы для горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент в прямом направлении через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый способ содержит:
измерение выходного сигнала акселерометра, индексированного в зависимости от расстояния вдоль пути на основе качения по меньшей мере одного колеса в обратном направлении, противоположном прямому направлению, начиная с заданной позиции; и
определение позиции отступа для буровой установки на пути в обратном направлении от заданной позиции по меньшей мере на основе контура поверхности пути в обратном направлении, которая характеризуется измеренным выходным сигналом акселерометра и измеренным расстоянием.
50. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли по пути в ответ на действия оператора;
энкодер для выработки выходного сигнала энкодера в ответ на качение по меньшей мере одного из колес;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана, и упомянутый выходной сигнал акселерометра также включают в себя одну или несколько ошибок тангажа в ответ на ускорения, вызванные оператором, которые возникают в результате одного или нескольких изменений скорости инструмента для съемки плана во время упомянутого качения, осуществляемого оператором; и
процессор, выполненный с возможностью обнаружения изменений скорости на основе выходного сигнала энкодера и применения компенсации к выходному сигналу акселерометра на основе обнаруженных изменений для выработки скомпенсированной ориентации по тангажу с уменьшенными ошибками по тангажу.
51. Инструмент для съемки плана по п.50, в котором процессор применяет компенсацию к выходному сигналу акселерометра на основе калибровочного коэффициента.
52. Инструмент для съемки плана по п.50, в котором энкодер вырабатывает импульсный выходной сигнал в ответ на качение, включающий в себя последовательность импульсов, которые разделены по времени интервалом между импульсами, который изменяется в зависимости от изменений скорости, и упомянутый процессор определяет ускорения, вызванные оператором, на основе скорости изменения интервала между импульсами.
53. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения колес, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор для выработки (1) указания для оператора, когда скорость качения превышает пороговую скорость, чтобы порекомендовать оператору снизить ее, тем самым поддерживая контакт между колесами и поверхностью земли, и (2) контура поверхности пути в вертикальной плоскости на основе выходных данных энкодера и акселерометра.
54. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
колесо для качения по поверхности земли по пути в ответ на перемещение, осуществляемое оператором;
энкодер для выработки выходного сигнала энкодера в ответ на качение колеса;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана, причем упомянутый выходной сигнал акселерометра показывает чувствительный к температуре дрейф;
печь, которая принимает упомянутый акселерометр для поддержания регулируемой температуры акселерометра, чтобы уменьшить упомянутый чувствительный к температуре дрейф во время упомянутого качения; и
процессор для выработки контура поверхности упомянутого пути по меньшей мере в вертикальной плоскости на основе выходного сигнала энкодера и выходного сигнала акселерометра.
55. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
колесо для качения по поверхности земли по пути в ответ на перемещение, осуществляемое оператором, причем упомянутый путь включает в себя начальную позицию и конечную позицию;
энкодер для выработки выходного сигнала энкодера в ответ на качение колеса;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана, причем упомянутый выходной сигнал акселерометра подвержен фиксированному смещению измерения, которое вносит в выходной сигнал акселерометра ошибку измерения ориентации по тангажу; и
процессор для записи исходящего набора данных, включающих в себя множество исходящих показаний энкодера, индексированных по множеству исходящих показаний акселерометра в ответ на качение инструмента для съемки плана от начальной позиции до конечной позиции, и для записи входящего набора данных, включающих в себя множество входящих показаний энкодера, индексированных по множеству входящих показаний акселерометра в ответ на качение инструмента для съемки плана в обратном направлении от конечной позиции до начальной позиции, и для объединения исходящего набора данных с входящим набором данных для выработки контура поверхности по меньшей мере в вертикальной плоскости между начальной позицией и конечной позицией таким образом, чтобы уменьшить ошибку измерения ориентации по тангажу на выходе акселерометра.
56. Инструмент для съемки плана по п.55, дополнительно содержащий:
GPS-датчик для выработки GPS-информации о местоположении; и
упомянутый процессор, выполненный с возможностью записи GPS-информации о местоположении в качестве части исходящего набора данных для получения характеристик исходящего пути GPS и для сравнения входящих GPS-позиций во время движения в обратном направлении по входящему пути для обнаружения того, что входящий путь GPS отклонился от исходящего пути GPS.
57. Способ использования в системе горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу с использованием бурильной колонны, которая продолжается от буровой установки до бурового инструмента, причем упомянутый способ содержит:
считывание выходного сигнала акселерометра, который характеризует ориентацию по тангажу инструмента для съемки плана для качения по поверхности земли вдоль пути, и индексацию выходного сигнала акселерометра в зависимости от расстояния вдоль пути во время качения в прямом направлении от начальной позиции до конечной позиции для выработки исходящего набора данных, причем выходной сигнал акселерометра подвержен фиксированной погрешности измерения, которая вносит ошибку измерения ориентации по тангажу в выходной сигнал акселерометра;
считывание выходного сигнала акселерометра, индексированного по расстоянию вдоль пути, с учетом фиксированного смещения, во время качения в обратном направлении от начальной позиции до конечной позиции для получения исходящего набора данных; и
объединение исходящего набора данных с входящим набором данных для выработки контура поверхности между начальной позицией и конечной позицией таким образом, чтобы уменьшить ошибку измерения ориентации по тангажу в выходном сигнале акселерометра.
58. Способ использования в системе горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый способ содержит:
качение инструмента для съемки плана в исходящем направлении от начальной позиции до конечной позиции при считывании выходного сигнала акселерометра, который образует часть инструмента для съемки плана, для получения характеристик его ориентации по тангажу в качестве сбора исходящего набора данных, причем выходной сигнал акселерометра подвержен ошибке измерения ориентации по тангажу, возникающей из-за фиксированной погрешности измерения акселерометра; и
качение инструмента для съемки плана во входящем направлении от начальной позиции до конечной позиции в обратном направлении при считывании выходного сигнала акселерометра для получения характеристик его ориентации по тангажу для сбора исходящего набора данных с выходным сигналом акселерометра с учетом упомянутой ошибки измерения ориентации по тангажу из-за фиксированной погрешности измерения для объединения исходящего набора данных с входящим набором данных таким образом, чтобы устранить фиксированную погрешность измерения при выработке контура поверхности между начальной позицией и конечной позицией.
59. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
первичное колесо, имеющее диаметр первичного колеса, для вращения вокруг оси первичного колеса для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором;
следующее колесо, имеющее диаметр следующего колеса, который является таким же, как диаметр первичного колеса, для вращения вокруг оси следующего колеса во время упомянутого качения;
корпус, который поддерживает первичное колесо и следующее колесо на одной линии для качения в одной плоскости таким образом, чтобы ось следующего колеса была неподвижно расположена на расстоянии от оси первичного колеса и по меньшей мере в целом параллельна ей;
энкодер для выработки выходного сигнала энкодера в ответ на качение первичного колеса; и
акселерометр, поддерживаемый корпусом между осью первичного колеса и осью следующего колеса, причем акселерометр включает в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор для выработки контура поверхности упомянутого пути по меньшей мере в вертикальной плоскости на основе по меньшей мере выходного сигнала энкодера и выходного сигнала акселерометра.
60. Инструмент для съемки плана по п.59, в котором упомянутый процессор определяет подземный план для бурового инструмента под поверхностью земли относительно упомянутого пути.
61. Инструмент для съемки плана по п.59, в котором акселерометр поддерживается в позиции, которая является средней точкой вдоль линии, проходящей между осью первичного колеса и осью следующего колеса.
62. Инструмент для съемки плана по п.59, дополнительно содержащий:
узел рукоятки, включающий в себя дальний конец, имеющий рукоятку, которая выполнена с возможностью взаимодействия с рукой оператора, и проксимальный конец узла рукоятки шарнирно поддерживается упомянутым корпусом для поворота в диапазоне углов поворота вокруг оси поворота, которая параллельна оси первичного колеса и оси следующего колеса для независимого поворота корпуса вместе с первичным колесом и следующим колесом относительно узла рукоятки для перемещения по неровностям местности и наклонной местности.
63. Инструмент для съемки плана по п.62, в котором ось поворота расположена по меньшей мере на одинаковом расстоянии от оси первичного колеса и от оси следующего колеса.
64. Инструмент для съемки плана по п.59, в котором упомянутый корпус расположен между первичным колесом и следующим колесом, причем каждое колесо соприкасается с ровной поверхностью, находится на расстоянии по меньшей мере 13,97 см (5,5 дюйма) от ровной поверхности.
65. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу, используя бурильную колонну, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли по первому пути и второму пути в ответ на перемещение оператором, причем первый путь и второй путь отделены друг от друга препятствием;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения колес, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор для выработки подземного плана для бурового инструмента под поверхностью земли по отношению к первому пути и второму пути на основе выходного сигнала энкодера и выходного сигнала акселерометра, так что подземный план включает в себя первый сегмент ствола скважины, соответствующий первому пути, второй сегмент ствола скважины, соответствующий второму пути, и сшитый сегмент ствола скважины, который соединяет первый сегмент ствола скважины со вторым сегментом ствола скважины.
66. Инструмент для съемки плана по п.65, в котором первый путь включает в себя первую конечную точку, и второй путь включает в себя вторую конечную точку, так что первая конечная точка находится ближе ко второй конечной точке, чем любая другая точка на первом пути, и вторая конечная точка находится ближе к первой конечной точке, чем любая другая точка на втором пути.
67. Инструмент для съемки плана по п.66, в котором первая конечная точка находится с разницей по высоте по отношению ко второй конечной точке, и процессор выполнен с возможностью выработки подземного плана с учетом разницы по высоте.
68. Инструмент для съемки плана по п.67, дополнительно содержащий:
датчик атмосферного давления для выработки выходного сигнала датчика атмосферного давления во время упомянутого качения, и
упомянутый процессор дополнительно выполнен с возможностью определения разности высот на основе выходного сигнала датчика давления в первой конечной точке и второй конечной точке в качестве части выработки подземного плана.
69. Инструмент для съемки плана по п.66, в котором первая конечная точка находится с боковым смещением относительно второй конечной точки, и процессор выполнен с возможностью выработки подземного плана для учета бокового смещения.
70. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу для выполнения подземной операции с использованием бурильной колонны, длина которой продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
приемник шума для выработки данных шума в полосе частот в ответ на качение; и
процессор для (1) выработки подземного плана для бурового инструмента ниже пути, начиная с начальной позиции, в которой буровой инструмент входит в землю по меньшей мере на основе контура поверхности пути, который определяется с помощью выходного сигнала энкодера и выходного сигнала акселерометра, и (2) корреляции данных шума, измеренных вдоль пути над поверхностью земли, с расстоянием от начальной позиции вдоль подземного плана на основе контура таким образом, чтобы для любой заданной позиции на подземном пути набор коррелированных данных шума соответствовал в верхней позиции на пути, которая находится непосредственно над заданной позицией, чтобы компенсировать разницу между первым расстоянием по подземному плану для достижения заданной позиции и вторым расстоянием вдоль пути для достижения верхней позиции, которая возникает из-за вертикального смещения между подземным планом и путем.
71. Инструмент для съемки плана по п.70, в котором подземный план включает в себя подземный вертикальный контур, и упомянутый процессор выполнен с возможностью дополнительной компенсации дополнительного вертикального смещения из-за подземного вертикального контура.
72. Инструмент для съемки плана, предназначенный для использования с системой, в которой буровая установка продвигает буровой инструмент, который передает электромагнитный сигнал определения местоположения для горизонтально направленного бурения через породу, причем система включает в себя множество устройств слежения, позиционируемых на поверхности земли для отслеживания бурового инструмента под землей на основе приема электромагнитного сигнала определения местоположения, при этом инструмент для съемки плана содержит:
одно или несколько колес для качения вдоль пути на поверхности земли в ответ на действия оператора;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес; и
процессор для измерения пройденного расстояния вдоль упомянутого пути на основе выходного сигнала энкодера и, в ответ на обнаружение того, что инструмент для съемки плана прошел определенное расстояние, выработки указания для оператора разместить одно из упомянутых устройств слежения на пути.
73. Инструмент для съемки плана по п.72, дополнительно содержащий
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана; и
упомянутый процессор дополнительно выполнен с возможностью определения контура поверхности упомянутого пути в вертикальной плоскости на основе выходного сигнала энкодера и выходного сигнала акселерометра и выработки дополнительного указателя для размещения одного из устройств слежения на пути на основе контура.
74. Инструмент для съемки плана, предназначенный для использования с системой, в которой буровая установка продвигает буровой инструмент, который передает электромагнитный сигнал определения местоположения для горизонтально направленного бурения через породу, причем система включает в себя множество устройств слежения, позиционируемых на поверхности земли для отслеживания бурового инструмента под землей на основе приема электромагнитного сигнала определения местоположения, причем инструмент для съемки плана содержит:
одно или несколько колес для качения вдоль пути на поверхности земли в ответ на действия оператора;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор, выполненный с возможностью определения контура поверхности упомянутого пути в вертикальной плоскости на основе выходного сигнала энкодера и выходного сигнала акселерометра и для выработки указателя для размещения одного из устройств слежения на пути на основе контура.
75. Инструмент для съемки плана, предназначенный для использования с системой, в которой буровая установка продвигает буровой инструмент, который передает электромагнитный сигнал определения местоположения для горизонтального направленного бурения через породу, причем система включает в себя множество устройств слежения, позиционируемых на поверхности земли для отслеживания бурового инструмента под землей на основе приема электромагнитного сигнала определения местоположения, при этом инструмент для съемки плана содержит:
одно или несколько колес для качения вдоль пути на поверхности земли в ответ на действия оператора;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана; и
пользовательский интерфейс для обслуживания оператора для обозначения по меньшей мере одной позиции вдоль пути, на котором оператор размещает конкретное одно из упомянутых устройств слежения, и для ввода целевой глубины для бурения в целевой позиции непосредственно под конкретным устройством слежения; и
процессор для определения контура поверхности пути в вертикальной плоскости на основе выходного сигнала энкодера и выходного сигнала акселерометра и для выработки подземного плана для бурового инструмента под поверхностью земли, который проходит через целевую позицию.
76. Инструмент для съемки плана по п.75, в котором пользовательский интерфейс выполнен с возможностью приема целевого тангажа для бурового инструмента в целевом местоположении, и процессор выполнен с возможностью определения подземного плана таким образом, чтобы буровой инструмент достигал целевой позиции при целевом тангаже.
77. Инструмент для съемки плана по п.75, в котором процессор определяет целевой тангаж для бурового инструмента в целевой позиции на основе контура и целевой позиции.
78. Инструмент для съемки плана в качестве части системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу для выполнения подземной операции с использованием бурильной колонны, длина которой продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
приемник шума для выработки данных шума в полосе частот в ответ на качение; и
процессор для (1) выработки подземного плана для бурового инструмента ниже пути, начиная с начальной позиции, в которой буровой инструмент входит в землю по меньшей мере на основе контура поверхности пути, который определяется с помощью выходного сигнала энкодера и выходного сигнала акселерометра и (2) выработки набора выбранных частот для использования вдоль подземного пути, коррелированного с расстоянием, на основе данных шума, измеренных на поверхности земли.
79. Инструмент для съемки плана по п.78, в котором процессор выполнен с возможностью автоматического выбора набора частот.
80. Инструмент для съемки плана по п.78, в котором процессор вырабатывает набор выбранных частот на основе одного или нескольких пользовательских выборов.
81. Инструмент для съемки плана, предназначенный для съемки плана перемещения бурового инструмента во время операции подземного бурения, причем буровой инструмент образует часть системы горизонтального направленного бурения, в которой буровая установка продвигает буровой инструмент через породу с помощью бурильной колонны, которая продолжается от буровой установки до бурового инструмента, причем упомянутый инструмент для съемки плана содержит:
одно или несколько колес для качения по поверхности земли вдоль пути в ответ на перемещение, осуществляемое оператором;
энкодер для выработки выходного сигнала энкодера в ответ на качение одного из колес;
акселерометр, включающий в себя по меньшей мере одну ось измерения для выработки выходного сигнала акселерометра во время упомянутого качения, который характеризует ориентацию по тангажу инструмента для съемки плана; и
процессор, выполненный с возможностью разработки подземного плана на основе выходного сигнала энкодера и выходного сигнала акселерометра от текущей точки до целевой конечной точки путем максимизации количества линейного бурения для бурового инструмента, чтобы минимизировать количество криволинейного бурения от текущей точки до целевой конечной точки, путем итеративной разработки начального участка подземного плана и конечного участка подземного плана таким образом, чтобы начальный участок и конечный участок продолжались по направлению друг к другу, причем прямое направление движения начального участка и обратное направление движения конечного участка выровнены для соединения с помощью линейного участка таким образом, чтобы бурильный инструмент прибывал в целевую конечную точку с по меньшей мере точно определенной ориентацией по тангажу.
82. Инструмент для съемки плана по п.81, в котором процессор выполнен с возможностью разработки начального участка подземного плана, который является изогнутым, для размещения бурового инструмента в направлении движения для прибытия бурового инструмента в заданную конечную точку по линейному пути.
83. Инструмент для съемки плана по п.81, в котором процессор дополнительно выполнен с возможностью, чтобы бурильный инструмент дополнительно прибывал в целевую конечную точку с точно определенной ориентацией по рысканию.
| US 5720354 A, 24.02.1998 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 6315062 B1, 13.11.2001 | |||
| СИСТЕМА И СПОСОБ ДЛЯ ПОЛУЧЕНИЯ ОПЕРЕЖАЮЩИХ ИЗМЕРЕНИЙ В ПРОЦЕССЕ ОПЕРАЦИИ БУРЕНИЯ | 2012 |
|
RU2576043C1 |
| Токарный резец | 1924 |
|
SU2016A1 |
