Настоящее изобретение относится к голеностопным ортопедическим устройствам.
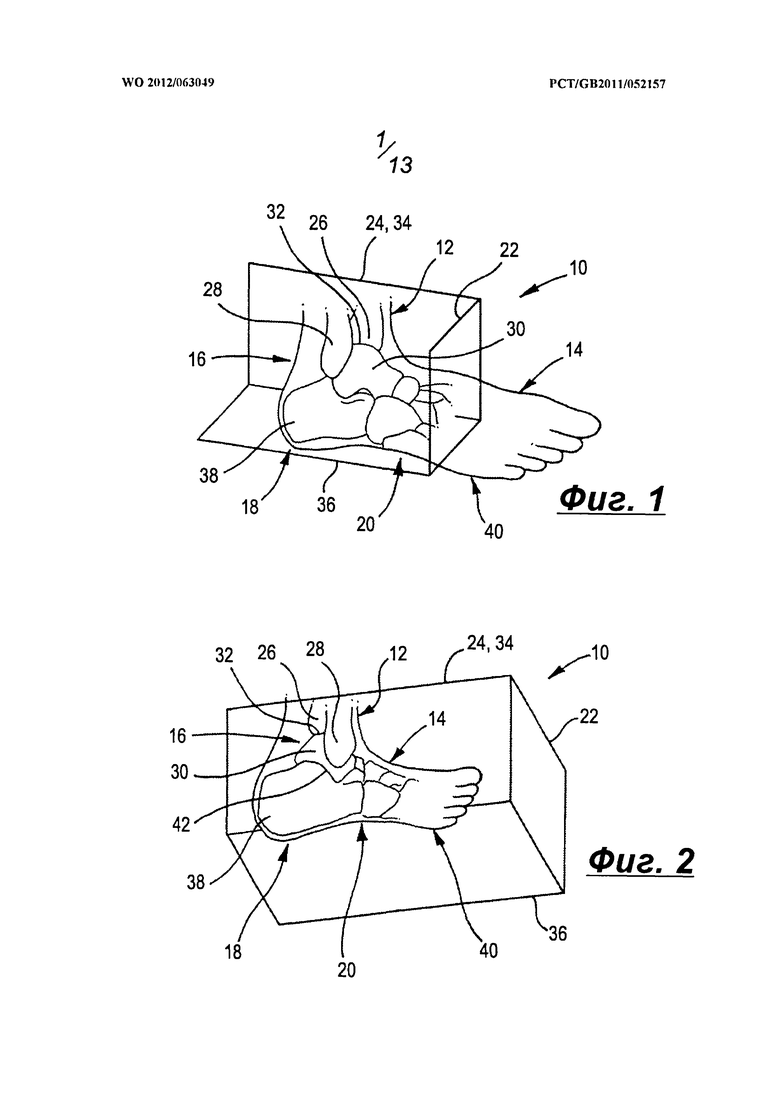
На фиг.1 и 2 показана часть нижней конечности 10 человека, содержащая нижнюю часть ноги 12, стопу 14 и голеностопный сустав 16 между ними. Стопа содержит задний отдел 18 стопы, средний отдел 20 стопы и передний отдел 40 стопы. На фиг.1 и 2 также показаны анатомические плоскости, содержащие фронтальную плоскость 22, медиальную сагиттальную плоскость 24 и поперечную плоскость 36.
В настоящем описании использованы стандартные анатомические термины, значения которых приведены ниже, и со ссылкой на фиг.1 и 2, во избежание возможных сомнений:
Отведение
Перемещение во фронтальной плоскости 22 по направлению от медиальной плоскости 24 (перемещение, противоположное приведению).
Приведение
Перемещение во фронтальной плоскости 22 по направлению к медиальной плоскости 24 (перемещение, противоположное отведению).
Голеностопный ортопедический аппарат, устройство или прибор
Ортопедический аппарат, устройство или прибор, применяемый при патологиях голени и стопы. Голеностопные ортопедические устройства могут быть статическими или динамическими. Статические устройства предотвращают перемещение. Динамические устройства обеспечивают возможность перемещения голени и стопы.
Голеностопный сустав
Сустав между большеберцовой костью 26, малоберцовой костью 28 и таранной костью 30, содержащей большеберцово-таранный сустав 32.
Передний
Передний или направленный вперед - наиболее приближенный к носу или пальцам ног (в анатомии человека).
Пяточная кость 38
Кость пятки (содержит задний отдел стопы 18)
Дорсальный
Верхняя сторона - расположенная наиболее близко к темени (в анатомии человека).
Тыльное сгибание
Поворотное перемещение среднего отдела 20 стопы кверху в сагиттальной плоскости в голеностопном суставе 16. Если угол в сагиттальной плоскости 34 между нижней стороной стопы 14 и нижней частью ноги 12 составляет менее 90°, то стопа 14 расположена в положении тыльного сгибания относительно исходного положения. Угол в 75° представляет собой тыльное сгибание на 15°.
Эверсия
Качательное перемещение среднего отдела 20 стопы в подтаранном суставе 42, перемещающее подошву в направлении от медиальной плоскости 24 (стопа 14 поворачивается кнаружи). Перемещение, противоположное инверсии.
Фронтальная плоскость 22
Любая вертикальная плоскость, разделяющая тело на переднюю и заднюю части (живот и спину). Также называют венечной плоскостью.
Задний отдел 18 стопы
Задняя часть стопы, содержащая пяточную кость 38
Инверсия
Качательное перемещение среднего отдела 20 стопы в подтаранном суставе 42, перемещающее подошву в направлении к медиальной плоскости 24 (стопа 14 поворачивается кнутри). Перемещение, противоположное эверсии.
Боковой
Сторона, наиболее удаленная от медиальной плоскости 24 тела.
Медиальный
Сторона, наиболее приближенная к медиальной плоскости 24 тела.
Медиальная плоскость 24
Сагиттальная плоскость, разделяющая тело на симметричные половины.
Исходное положение
Положение, в котором подошва стопы по существу расположена под углом в 90° относительно ноги.
Ортопедический аппарат, устройство или прибор
Ортопедический аппарат, устройство или прибор представляет собой ортопедическое устройство используемое для управления и/или направления и/или ограничения и/или крепления конечности, сустава или части тела по какой-либо причине; для ограничения перемещения в некотором направлении; для способствования перемещению в целом; для уменьшения сил нагрузки с конкретной целью, связанной с перемещением; для способствования реабилитации после перенесенных переломов после удаления гипсовой повязки; или для иной коррекции формы и/или функции тела для обеспечения возможности незатруднительного перемещения и/или уменьшения болевых ощущений.
Подошвенный
Нижняя сторона - расположенная наиболее близко к подошве стопы (в анатомии человека).
Подошвенное сгибание
Поворотное перемещение среднего отдела 20 стопы по направлению вниз в голеностопном суставе 16. Если угол в сагиттальной плоскости 34 между нижней стороной стопы 14 и нижней частью ноги 12 составляет более 90°, то стопа 14 расположена в положении подошвенного сгибания относительно исходного положения. Угол в 100° представляет собой подошвенное сгибание на 10°.
Задний
Задний или направленный назад - наиболее удаленный от носа или пальцев ног (в анатомии человека).
Сагиттальная плоскость 34
Воображаемая плоскость, проходящая вертикально от верхней части тела к нижней, разделяя тело на левую и правую части.
Подтаранный сустав 42
Сустав между подошвенной поверхностью таранной кости 30 и дорсальной поверхностью пяточной кости 38.
Большеберцово-таранный сустав 32
Сустав между подошвенными поверхностями большеберцовой кости 26 и малоберцовой кости 28, и дорсальной поверхностью таранной кости 30.
Поперечная плоскость 36
Воображаемая плоскость, разделяющая тело на верхнюю и нижнюю части, и перпендикулярная фронтальной и сагиттальной плоскостям (также называемая горизонтальной плоскостью, осевой плоскостью или трансаксиальной плоскостью).
Вальгус (вальгус пятки)
Эверсия и отведение пяточной кости 38.
Варус (варус пятки)
Инверсия и приведение пяточной кости 38.
Основное перемещение стопы относительно нижней части ноги, необходимое для ходьбы и бега, выполняется посредством так называемого голеностопного сустава. Голеностопный сустав содержит два главных сустава, каждый из которых обладает основной осью перемещения. Сустав, образованный между нижней поверхностью большеберцовой кости и верхней поверхностью таранной кости, называется большеберцово-таранным суставом. Большеберцово-таранный сустав обеспечивают возможность подъема и опускания стопы или, согласно медицинской терминологии, возможность ее тыльного и подошвенного сгибаний. Сустав, образованный нижней поверхностью таранной кости и верхней поверхностью пяточной кости, обеспечивает возможность поворота стопы наружу или внутрь при перемещении качением, называемом эверсией и инверсией. Анатомически правильное перемещение заднего отдела стопы представляет собой сложный процесс, поскольку оно включает комбинированные перемещения, состоящие из перемещений большеберцово-таранного сустава и подтаранных суставов.
Пациентам, страдающим от инвалидизирующих (врожденных, травматических или идиопатических) состояний стоп, зачастую помогает терапевтическое лечение с использованием ортопедических устройств или аппаратов. Подобные аппараты обычно удерживают стопу в заданном положении с обеспечением возможности ограниченного перемещения стопы в пределах заданных ограничений или возможности изменения характера перемещения стопы конкретным образом.
Настоящее изобретение снимает существенные ограничения, свойственные известным решениям ортопедических аппаратов.
Известные решения ортопедических аппаратов не обеспечивают возможность сочетания перемещений подтаранных суставов и большеберцово-таранного сустава, в результате чего они не пригодны для использования в динамической коррекционной терапии, задействующей подтаранные суставы и большеберцово-таранный сустав. Известные динамические аппараты не могут обеспечить принудительное анатомически правильное перемещение обоих суставов.
Известные решения ортопедических аппаратов, требующие крепления или наклона подтаранного сустава, обеспечивают достижение поставленной задачи только путем введения жесткой соединительного стержня между каждой из стоп пациента или путем использования прикрепляемого к ноге элемента, который проходит значительно выше колена, причем при использовании этого элемента колено пациента расположено в закрепленном и по существу согнутом положении. Подобные аппараты являются неудобными, поскольку пользователь не способен в них ходить и страдает от других свойственных подобным решениям недостатков.
Известные универсальные аппараты для лечения заболеваний, таких как свисание стопы и многие другие, не обеспечивают динамической терапии для подтаранных суставов и большеберцово-таранного сустава. Подобные аппараты не могут поддерживать анатомически правильное перемещение и приводить к нему.
Настоящее изобретение снимает принципиальные ограничения известных решений ортопедических аппаратов и обеспечивает возможность выполнения инновационных усовершенствованных терапевтических подходов к лечению пациентов, страдающих от огромного множества инвалидизирующих состояний стоп. Заявитель точно определил основные анатомические перемещения большеберцово-таранного сустава и подтаранных суставов и определил принцип моделирования этих перемещений посредством одного носимого устройства. Особенно важно, что заявитель определил важность удивительной природы подтаранного сустава. Изобретение обеспечивает возможность использования геометрии перемещения для создания динамического ортопедического устройства, выполненного с возможностью закрепления или наклона подтаранного сустава без необходимости использования соединительных стержней или крепления и сгибания колена.
Согласно первому варианту настоящего изобретения обеспечено голеностопное ортопедическое устройство, содержащее первую часть для соединения с элементом захвата ноги, вторую часть для соединения с элементом захвата стопы и соединитель для соединения первой части со второй частью, причем устройство может быть расположено в регулирующем положении, в котором соединитель обеспечивает возможность регулирующего перемещения одной из частей относительно другой части, причем устройство выполнено таким образом, что при использовании в закрепленном положении, регулирующее перемещение по существу соответствует анатомическому перемещению одной части ноги и стопы относительно другой части ноги и стопы.
Возможно, анатомическое перемещение включает перемещение одной части ноги/стопы относительно другой части ноги/стопы вокруг анатомической оси поворота. Возможно, регулирующее перемещение включает перемещение одной части относительно другой части вокруг оси поворота устройства. Возможно, в закрепленном положении, в котором ортопедическое устройство закреплено на нижней конечности пользователя, ось поворота устройства регулирующего перемещения по существу совпадает с анатомической осью поворота анатомического перемещения.
Возможно, соединитель содержит регулятор, обеспечивающий возможность регулирующего перемещения в положении регулировки.
В одном из примеров реализации, соединитель содержит первый регулятор, который в положении регулировки может обеспечить возможность первого регулирующего перемещения.
В другом примере реализации, соединитель содержит второй регулятор, который в положении регулировки может обеспечить возможность второго регулирующего перемещения.
Согласно второму варианту настоящего изобретения обеспечено голеностопное ортопедическое устройство, содержащее первую часть для соединения с элементом захвата ноги, вторую часть для соединения с элементом захвата стопы и соединитель для соединения первой части со второй частью, причем соединитель содержит первый регулятор, обеспечивающий возможность первого регулирующего относительного перемещения первой части и второй части вокруг первой оси поворота устройства в положении регулировки, причем соединитель содержит второй регулятор, обеспечивающий возможность второго регулирующего относительного перемещения первой части и второй части вокруг второй оси поворота устройства в положении регулировки, причем, при использовании в закрепленном положении, в котором устройство закреплено на ноге и стопе пользователя, первая ось устройства по существу соответствует основной анатомической оси поворота подтаранного сустава, а вторая ось устройства по существу соответствует основной анатомической оси поворота большеберцово-таранного сустава.
Таким образом, устройство моделирует и управляет анатомически правильным перемещением стопы и голени пользователя относительно ноги и обеспечивает возможность закрепления или наклона подтаранного сустава пользователя в положении, в котором стопа отведена или приведена, что обеспечивает возможность закрепления большеберцово-таранного сустава пользователя или его наклона в положении тыльного или подошвенного сгибания.
Устройство выполнено с возможностью крепления или наклона стопы пользователя в положении отведения или приведения по оси поворота подтаранного сустава без необходимости использования соединительного стержня между каждой из ног или элемента захвата ноги, который проходит над коленом и при использовании которого нога должна быть расположена в закрепленном состоянии и быть по существу согнутой в колене.
Возможно, ось поворота устройства первого регулирующего перемещения в закрепленном положении по существу совпадает с анатомической осью относительного поворота таранной кости и пяточных костей в подтаранном суставе.
Возможно, ось поворота устройства второго регулирующего перемещения в закрепленном положении по существу совпадает с анатомической осью относительного поворота таранной кости и большеберцовой и малоберцовой костей в большеберцово-таранном суставе.
Возможно, первая и вторая оси устройства по существу совпадают вдоль оси подтаранного сустава и оси большеберцово-таранного сустава, соответственно.
Возможно, ось поворота устройства первого регулирующего перемещения проходит от задней подошвенной части до передней дорсальной части в сагиттальной плоскости, и может стягивать первый угол устройства к поперечной плоскости в сагиттальной плоскости, а также может проходить от задней боковой части до передней медиальной части в поперечной плоскости, и может стягивать второй угол устройства к сагиттальной плоскости в поперечной плоскости.
В исходном положении, первый угол устройства может быть расположен в пределах от 32° до 52°, более предпочтительно может быть расположен в пределах от 37° до 47°, и оптимально может составлять 42°. Второй угол устройства может быть расположен в пределах от 8° до 24°, более предпочтительно может быть расположен в пределах от 12° до 20°, и оптимально может составлять 16°.
Возможно, ось поворота устройства второго регулирующего перемещения проходит от медиальной передней части до боковой задней части в поперечной плоскости, и может стягивать третий угол устройства к фронтальной плоскости в поперечной плоскости, а также может проходить от медиальной дорсальной части до боковой подошвенной части в фронтальной плоскости, и может стягивать четвертый угол устройства к поперечной плоскости во фронтальной плоскости.
В исходном положении, третий угол устройства может быть расположен в пределах от 15° до 30-35°, более предпочтительно может быть расположен в пределах от 20° до 30°, и оптимально может составлять 25°. Четвертый угол устройства может быть расположен в пределах от 3° до 13°, более предпочтительно может быть расположен в пределах от 6° до 10°, и оптимально может составлять 8°.
Устройство по п.п.1 или 2, в котором первый регулятор содержит первые средства наклона для обеспечения первой силы закрепления для закрепления подтаранного сустава пользователя в отведенном, исходном или приведенном положении при использовании устройства.
Возможно, устройство может быть переведено в жесткое и закрепленное положение, в котором стопа пользователя удержана в любом положении из исходного положения, отведенного положения, приведенного положения, положения тыльного сгибания и/или положения подошвенного сгибания, или в любом подходящем сочетании этих положений, без необходимости использования соединительного стержня, проходящей между стопами пользователя или элемента захвата ноги, проходящего над коленом пользователя, или без необходимости удержания ноги пользователя в согнутом положении.
Возможно, ортопедическое устройство может быть переведено из положения регулировки в ограниченное положение, в котором регулирующее перемещение ограничено относительно перемещения, обеспечиваемого в регулирующем положении, или в котором регулирующее перемещение по существу предотвращено. Возможно, регулятор или любой из регуляторов содержит ограничитель, выполненный с возможностью ограничения или по существу предотвращения регулирующего перемещения регулятора в ограниченном положении. Ограничитель может содержать ограничивающие ограничительные стопоры, которые могут ограничивать регулирующее перемещение ограничителя.
Возможно, регулятор или каждый регулятор содержит элемент наклона, выполненный с возможностью изменения характера регулирующего перемещения регулятора в одном направлении. Элемент наклона может прилагать силу кручения для изменения характера регулирующего перемещения в некотором направлении.
Возможно, первый регулятор содержит первые средства наклона для обеспечения первой силы крепления для крепления подтаранного сустава пользователя в отведенном, исходном или приведенном положении при использовании устройства. Возможно, первая сила крепления представляет собой силу кручения. Возможно, первые средства наклона содержат первый элемент наклона.
Возможно, второй регулятор содержит вторые средства наклона для обеспечения второй силы крепления для крепления большеберцово-таранного сустава пользователя в положении тыльного сгибания, в исходном положении или в положении подошвенного сгибания при использовании устройства. Возможно, вторая сила крепления представляет собой силу кручения. Возможно, вторые средства наклона содержат второй элемент наклона.
Возможно, первый регулятор содержит первые средства наклона для обеспечения первой силы крепления, а второй регулятор содержит вторые средства наклона для обеспечения второй силы крепления, причем указанные силы при использовании устройства совместно и одновременно закрепляют стопу пользователя в любом из исходного положения, отведенного положения, приведенного положения, положения тыльного сгибания и/или положения подошвенного сгибания, или в любом подходящем сочетании указанных положений.
Возможно, регулятор или каждый регулятор или любой из регуляторов содержит индикатор, который может указывать на относительную степень регулирующего перемещения регулятора.
Возможно, голеностопное ортопедическое устройство содержит элемент захвата ноги, содержащий закрепляющую часть, в которой может быть размещена часть нижней конечности, составляющая голень. Возможно, элемент захвата ноги выполнен регулируемым, в результате чего, в отрегулированном и закрепленном положении он прилагает силы крепления по оси перемещения каждого регулятора. Возможно, сила крепления в закрепленном и отрегулированном положении проходит через среднюю точку участка ноги, на котором элемент захвата ноги взаимодействует с ногой под углом, перпендикулярным оси поворота устройства первого регулятора. Возможно, сила крепления в закрепленном и отрегулированном положении проходит через среднюю точку участка ноги, на котором элемент захвата ноги взаимодействует с ногой под углом, перпендикулярным оси поворота устройства второго регулятора. Возможно, сочетание сил крепления в закрепленном и отрегулированном положении проходит через среднюю точку участка ноги, на котором элемент захвата ноги взаимодействует с ногой под углом, перпендикулярным оси поворота устройства первого регулятора, и на котором элемент захвата ноги взаимодействует с ногой под углом, перпендикулярным оси поворота устройства второго регулятора. Возможно, направление и ориентация сил крепления означают (?), что в закрепленном и отрегулированном положении устройство поддерживает такое положение стопы, в котором стопа отведена или приведена по основной анатомической оси перемещения подтаранного сустава пользователя и в котором она расположена в положении тыльного сгибания или подошвенного сгибания по основной анатомической оси перемещения большеберцово-таранного сустава пользователя.
Возможно, голеностопное ортопедическое устройство содержит крепление для прикрепления элемента захвата ноги к первому соединительному плечу. Крепление может быть выполнено регулируемым для обеспечения возможности регулирования для подгонки к ноге пациента и для достижения необходимой ориентации сил крепления относительно оси перемещения первого и второго регуляторов.
Возможно, устройство содержит элемент захвата стопы, который может содержать ботинок или подножку, в которой может быть размещена часть нижней конечности, составляющая стопу.
Возможно, второе соединительное плечо содержит крепежное приспособление для прикрепления элемента захвата стопы к устройству.
Согласно третьему варианту настоящего изобретения обеспечен способ крепления голени относительно стопы таким образом, что не требуется использование соединительного стержня между нижними конечностями, элемент захвата ноги не должен проходить над коленом пользователя, или нет необходимости в удержании ноги пользователя в согнутом положении, причем способ включает обеспечение голеностопного ортопедического устройства по любому из предыдущих пунктов.
Согласно четвертому варианту настоящего изобретения обеспечена шина для способствования иммобилизации части тела, содержащая голеностопное ортопедическое устройство по любому из указанных предыдущих пунктов.
Согласно четвертому варианту настоящего изобретения обеспечено голеностопное ортопедическое устройство, содержащее первую часть для соединения с элементом захвата ноги, вторую часть для соединения с элементом захвата стопы и соединитель для соединения первой части со второй частью, причем соединитель содержит регулятор, обеспечивающий возможность регулирующего относительного перемещения первой части и второй части вокруг оси поворота устройства в положении регулировки, причем регулятор содержит средства наклона для обеспечения силы кручения.
Возможно, средства наклона содержат элемент наклона.
Ниже, исключительно в качестве примера, описаны примеры реализации настоящего изобретения со ссылкой на прилагаемые чертежи, на которых:
На фиг.1 показан вид сбоку в перспективе правой стопы человека, на котором показаны кости голеностопного сустава и заднего отдела стопы, а также анатомические плоскости;
На фиг.2 показан вид сзади и сбоку в перспективе стопы и плоскостей по фиг.1;
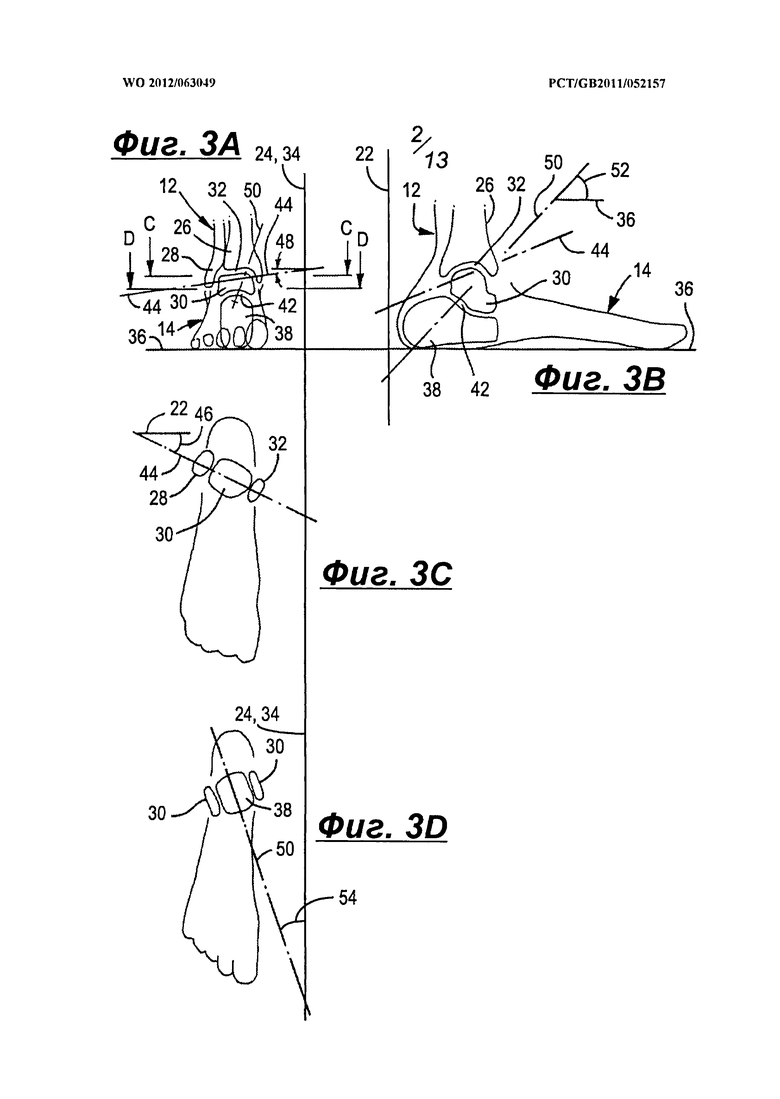
На фиг.3A-3D показаны упрощенные схематичные виды правой стопы человека в поперечном сечении через большеберцово-таранный и подтаранный суставы, причем фиг.3A представляет собой вид спереди, фиг.3B представляет собой вид сбоку с внешней стороны, а фиг.3C представляет собой вид в плане (дорсальный вид) на уровне большеберцово-таранного сустава, показанном линией C-C на фиг.3A, а фиг.3D представляет собой вид в плане (дорсальный вид) на уровне подтаранного сустава, показанном линией D-D на фиг.3A;
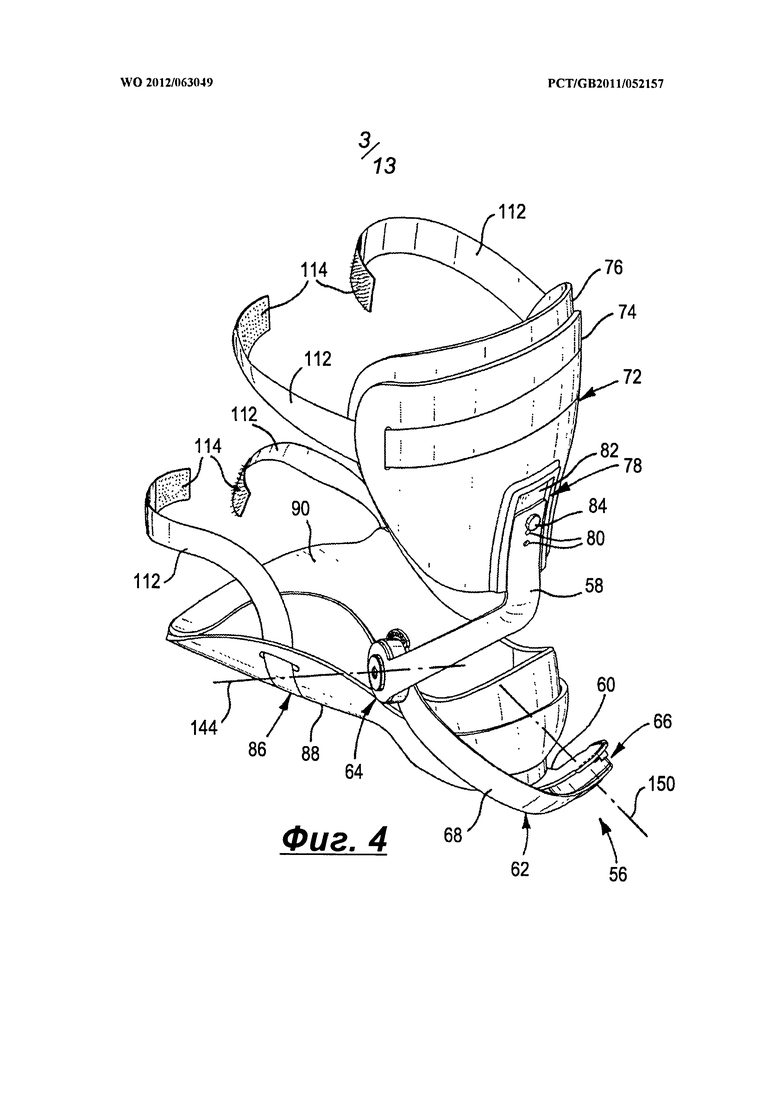
На фиг.4 показан вид сбоку в перспективе первого голеностопного ортопедического устройства;
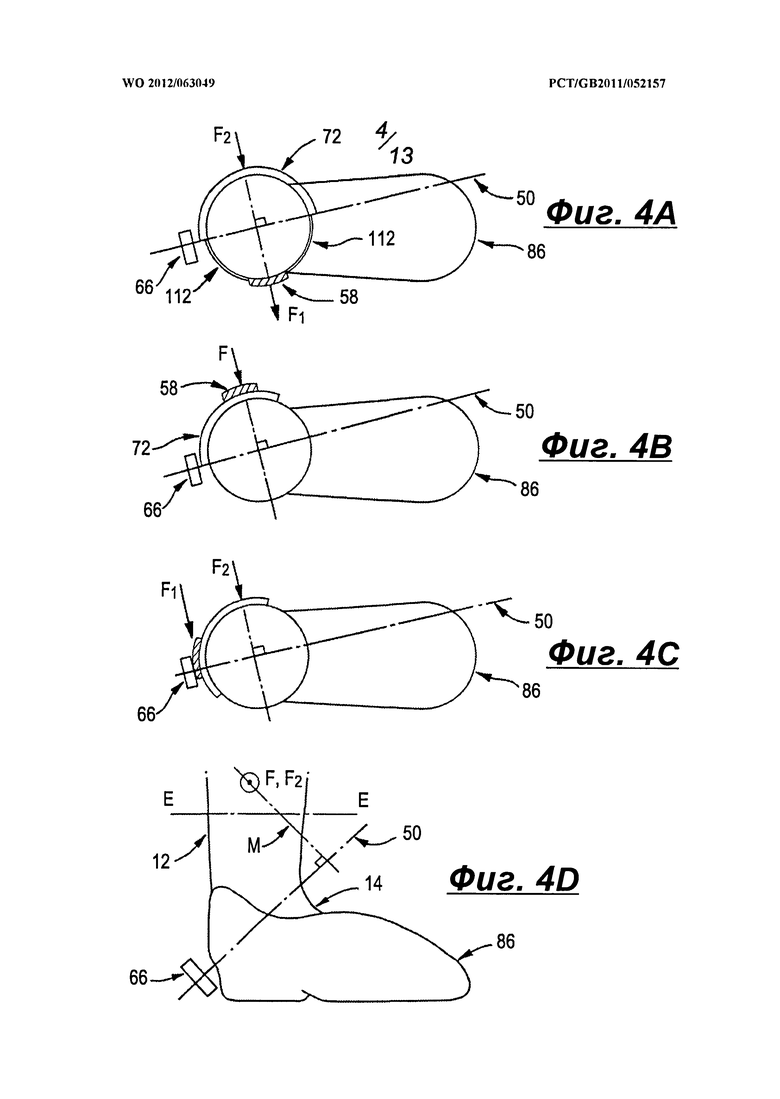
На фиг.4A, 4B и 4C показаны упрощенные виды в плане правой ноги и стопы, иллюстрирующие взаимодействие ножной накладки и первых регуляторов устройства по фиг.4 для формирования устройства, выполненного с возможностью обеспечения приведения или отведения ноги без необходимости использования соединительного стержня между каждой из стоп или необходимости удержания колена пользователя в закрепленном согнутом положении;
На фиг.4D показан вид сбоку ноги, стопы и устройства по фиг.4А, 4B и 4C;
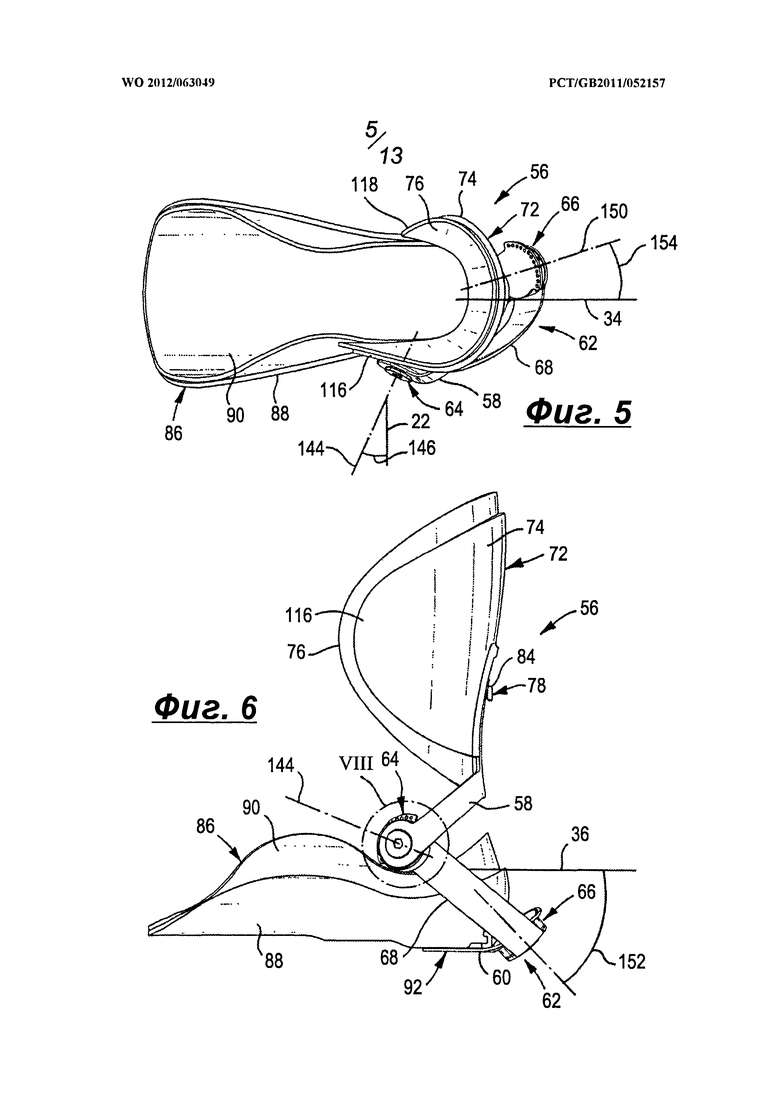
На фиг.5 показан вид в плане ортопедического устройства по фиг.4;
На фиг.6 показан вид сбоку ортопедического устройства по фиг.4 и 5;
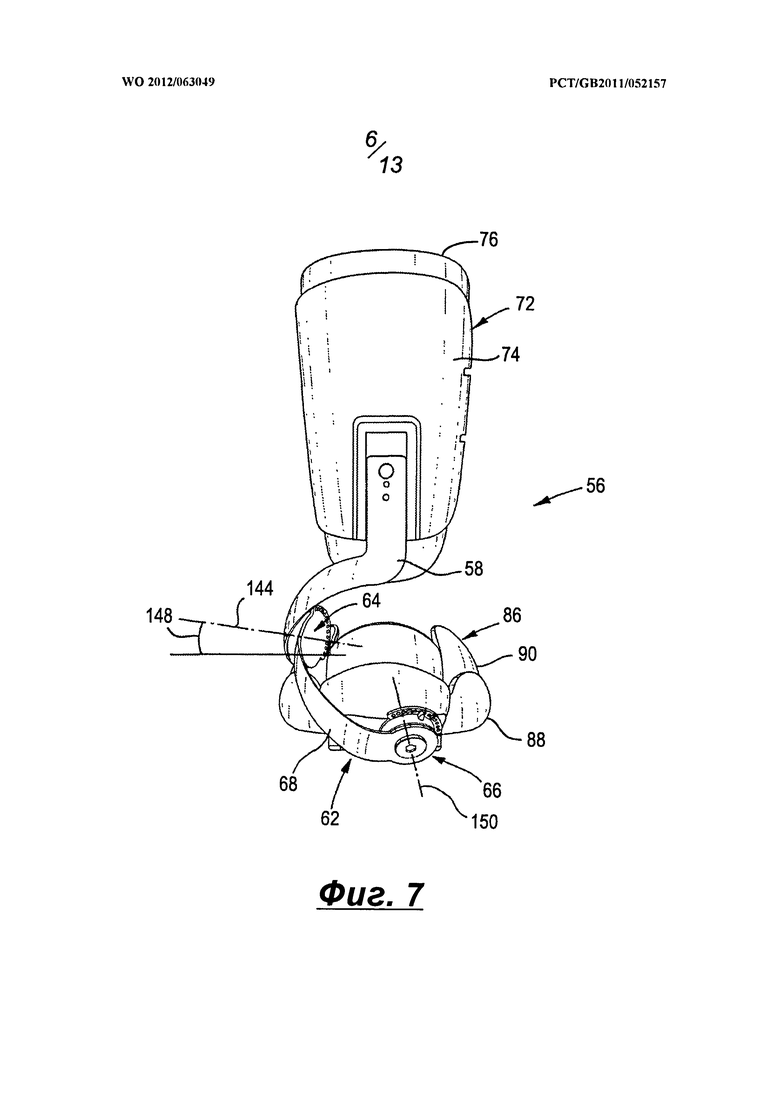
На фиг.7 показан вид сзади ортопедического устройства по фиг.4-6;
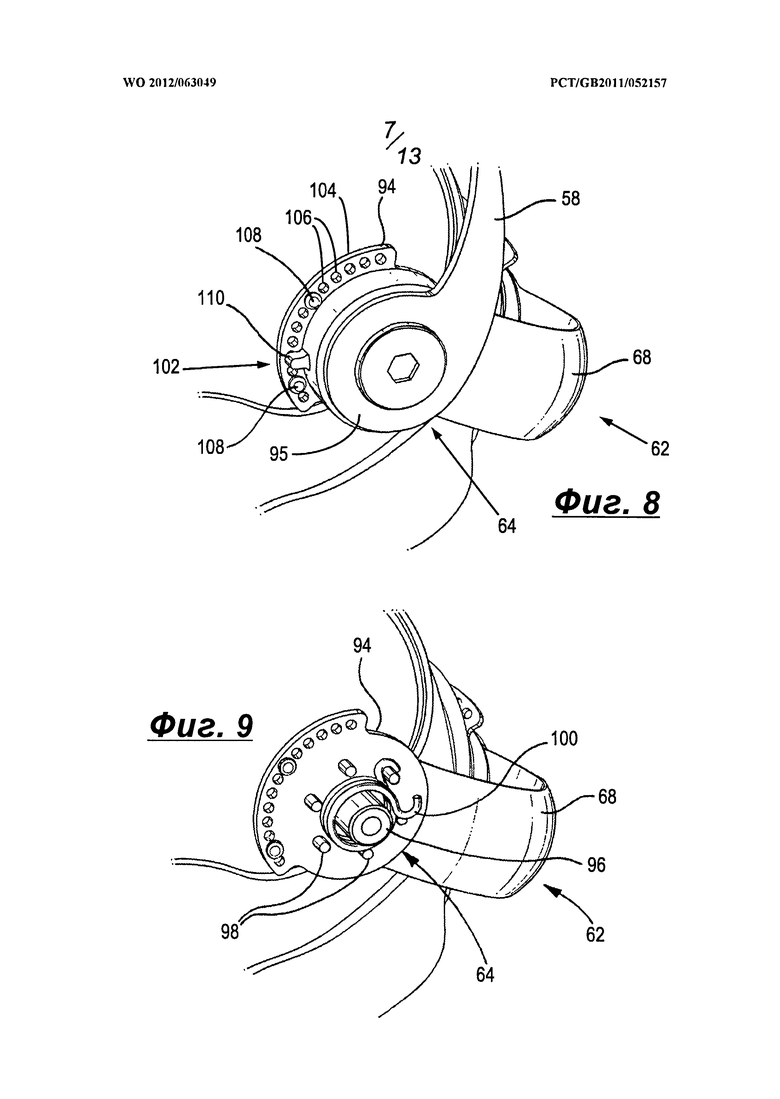
На фиг.8 показан вид сбоку элемента, отмеченного позицией VIII на фиг.6;
На фиг.9 показан вид элемента, показанного на фиг.8, в частично разобранном виде;
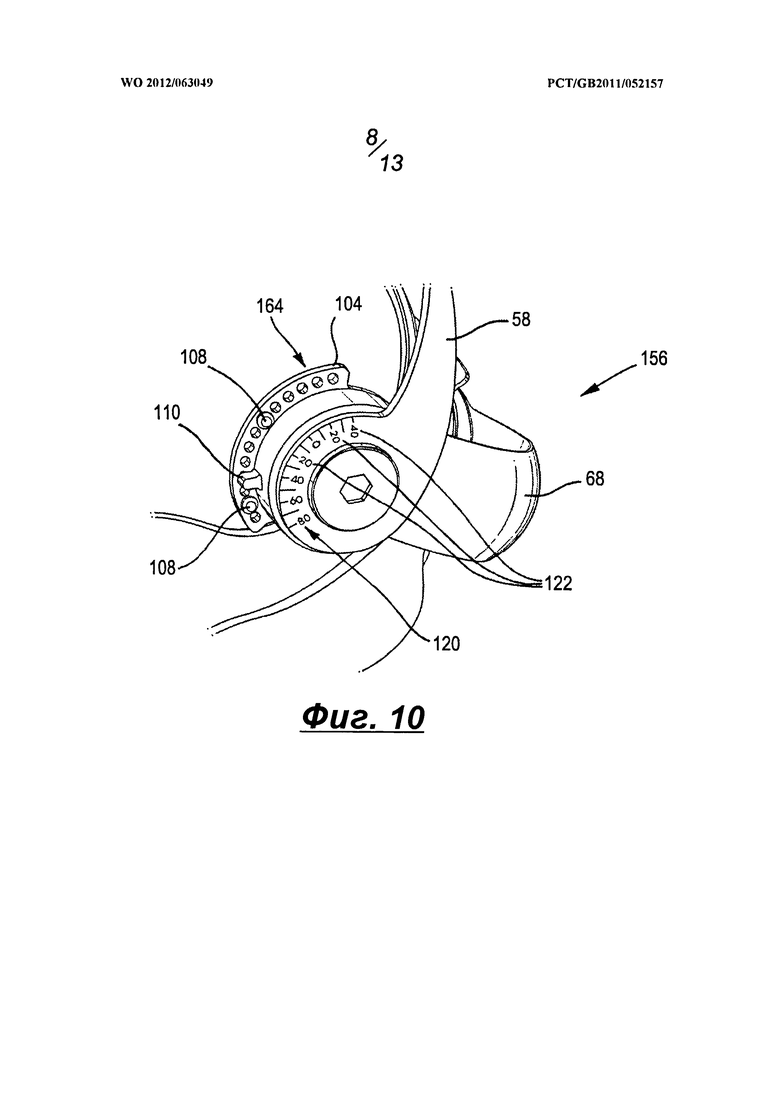
На фиг.10 показан сходный с фиг.8 вид элемента второго ортопедического устройства;
Фиг.11 не использована;
Фиг.12 не использована;
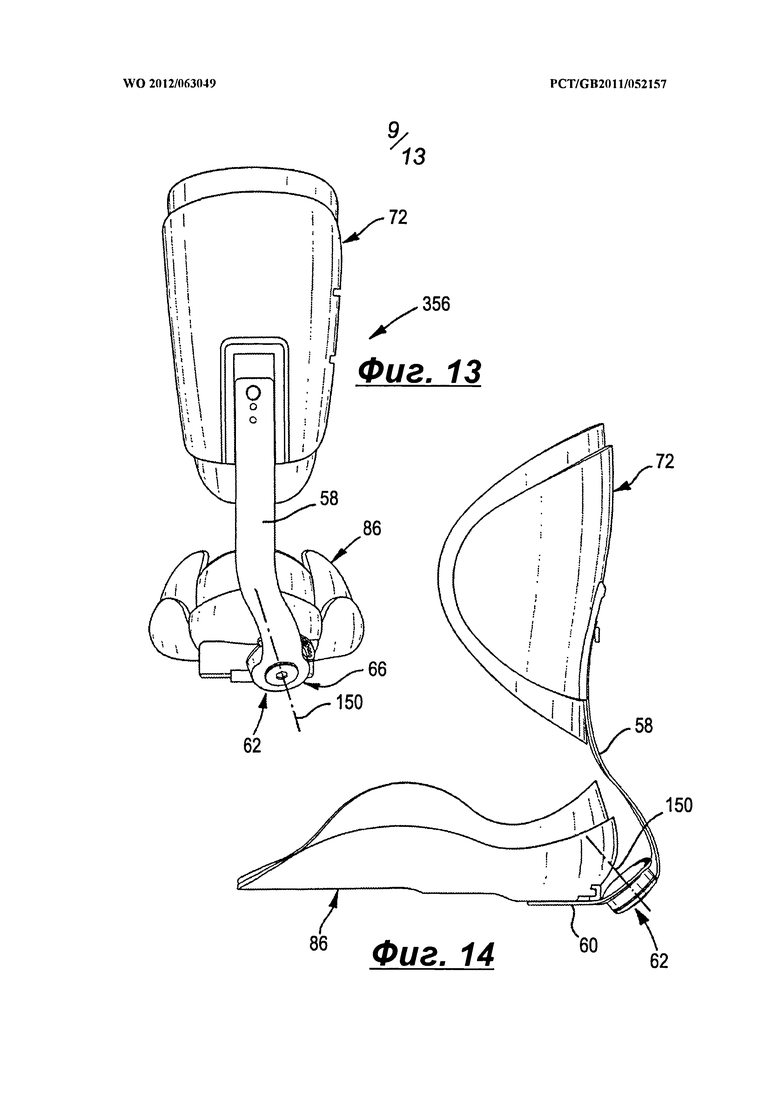
На фиг.13 показан вид сзади третьего ортопедического устройства;
На фиг.14 показан вид сбоку ортопедического устройства по фиг.13;
Фиг.15 не использована;
Фиг.16 не использована;
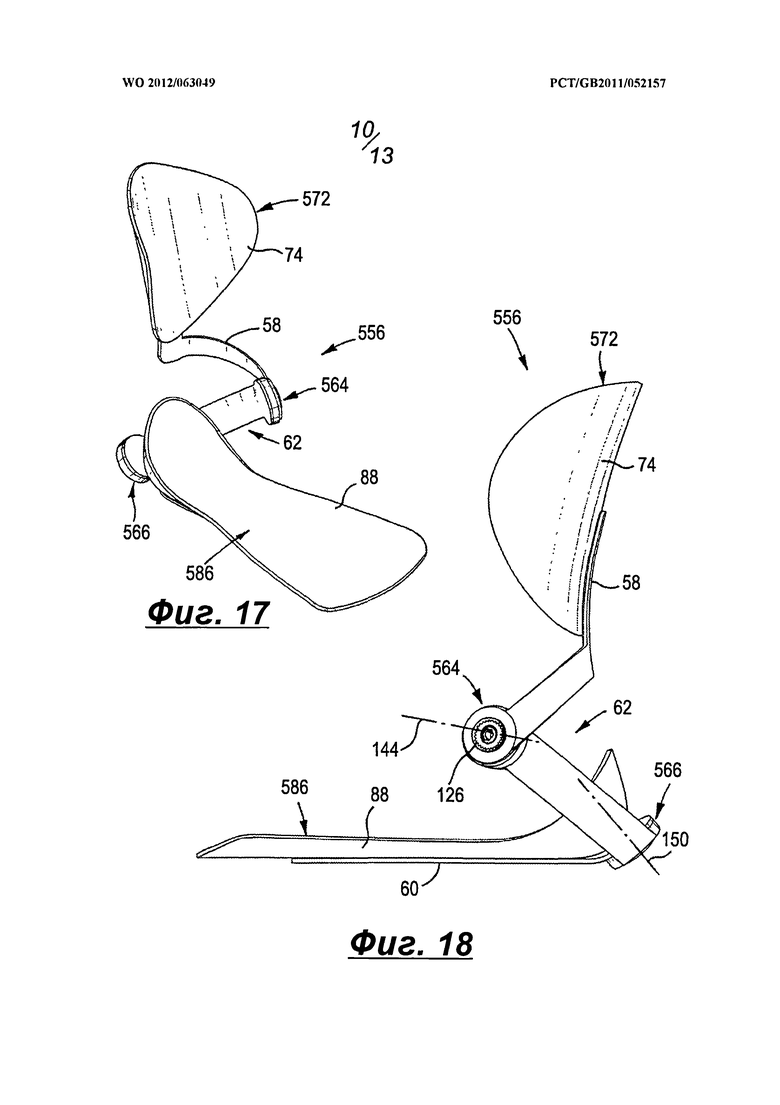
На фиг.17 показан медиальный вид сбоку в перспективе четвертого ортопедического устройства;
На фиг.18 показан вид сбоку ортопедического устройства по фиг.17;
На фиг.19 показан вид сзади пятого ортопедического устройства;
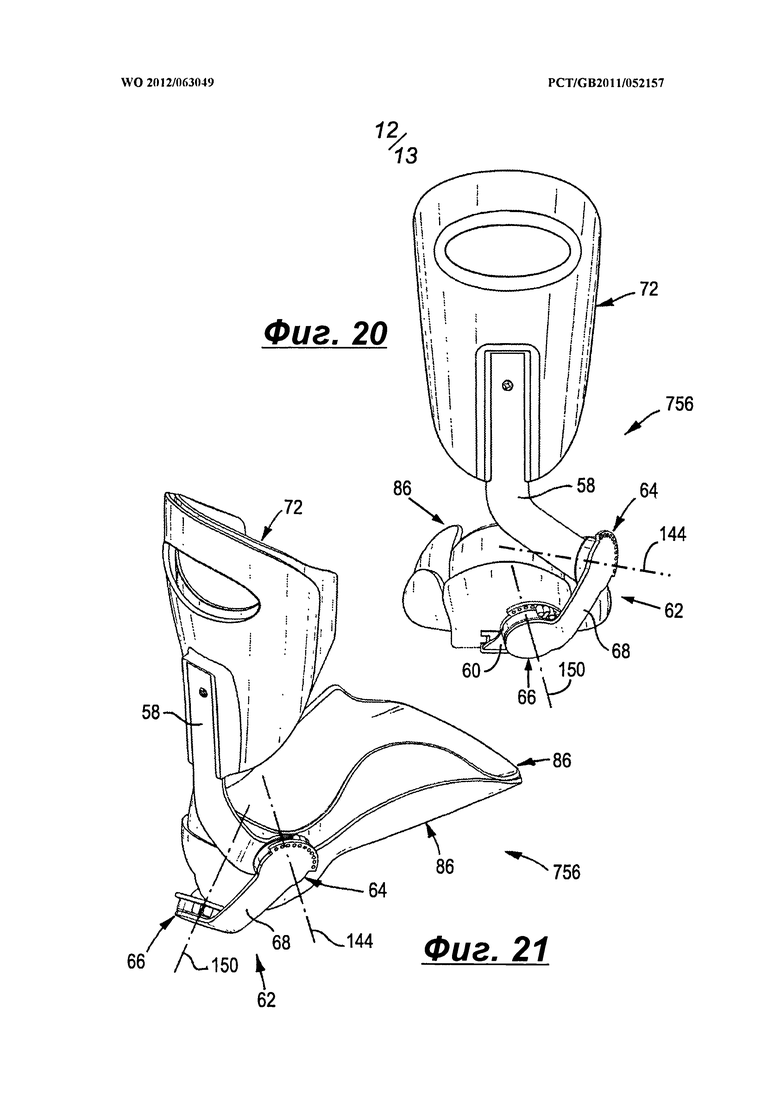
На фиг.20 показан вид сзади шестого ортопедического устройства;
На фиг.21 показан вид сбоку в перспективе ортопедического устройства по фиг.20; и
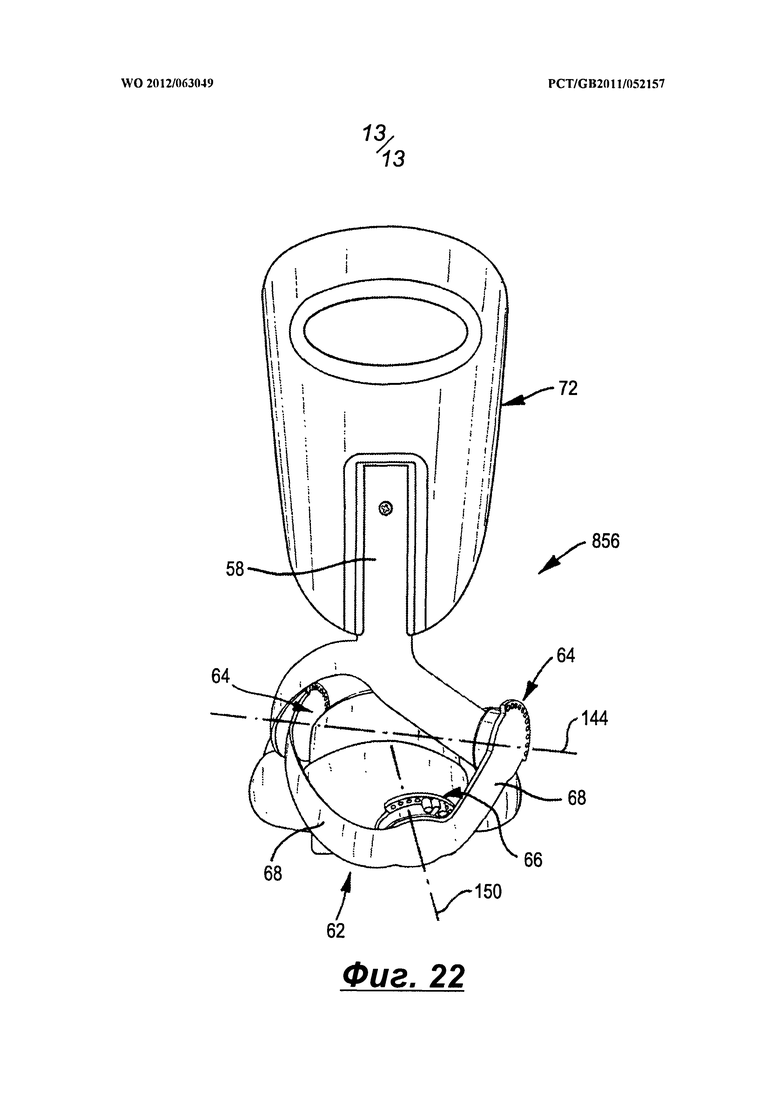
На фиг.22 показан вид сзади седьмого ортопедического устройства.
За исключением фиг.4A, 4B, 4C и 4D, все показанные устройства предназначены для левой нижней конечности. Специалисту будет очевидно, что устройства для правой нижней конечности зеркально симметричны.
Перемещение стопы 14 относительно ноги 12 является относительно сложным. Поверхности, составляющие большеберцово-таранный и подтаранный суставы, обеспечивают возможность трехмерного перемещения, сложно поддающегося адекватному описанию, анализу и моделированию. Перемещение может быть изменчивым и может быть различным у разных людей. Таким образом, например, в различных исследованиях описано, что большеберцово-таранный сустав имеет спиральную ось, шарнирную ось, и несколько осей, отличающихся друг от друга при подошвенном и тыльном сгибаниях.
Заявитель определил, что для обеспечения ортопедического устройства для лечения различных заболеваний голени и стопы, перемещение стопы 15 относительно ноги 12 может быть упрощено, но при этом точно смоделировано согласно фиг.3A-3D.
При таком анализе и моделировании, перемещение в подтаранном суставе 42 упрощено и представляет собой поворот вокруг подтаранной оси 50 поворота, проходящей от задней подошвенной части к передней дорсальной части в сагиттальной плоскости 34, стягивая первый анатомический угол 52 к поперечной плоскости 36 в сагиттальной плоскости 34, а также проходящей от задней боковой части к передней медиальной части в поперечной плоскости 36, стягивая второй анатомический угол 54 к сагиттальной плоскости 34 в поперечной плоскости 36.
Когда стопа 14 расположена в исходном положении, первый анатомический угол 52 может быть расположен в пределах от 32° до 52°, чаще расположен в пределах от 37° до 47° и обычно составляет приблизительно 42°. В исходном положении второй анатомический угол может быть расположен в пределах от 8° до 24°, чаще расположен в пределах от 12° до 20°, а обычно составляет приблизительно 16°.
При указанном анализе и моделировании, перемещение в большеберцово-таранном суставе 32 упрощено и представляет собой поворот вокруг большеберцово-таранной оси 44 поворота, проходящей от медиальной передней части к боковой задней части в поперечной плоскости 36 с обеспечением стягивания третьего анатомического угла 46 к фронтальной плоскости 22 в поперечной плоскости 36 и проходящей от медиальной дорсальной части к задней подошвенной части во фронтальной плоскости 22 с обеспечением стягивания четвертого анатомического угла 48 к поперечной плоскости 36 во фронтальной плоскости 22.
Когда стопа 14 расположена в исходном положении согласно фиг.3A-3D, третий анатомический угол 46 может быть расположен в пределах от 15° до 35°, чаще расположен в пределах от 20° до 30°, и обычно составляет приблизительно 25°. В исходном положении, четвертый анатомический угол 48 может быть расположен в пределах от 3° до 13°, чаще расположен в пределах от 6° до 10°, и обычно составляет приблизительно 8°.
В широком и приблизительном смысле, анатомическое перемещение в большеберцово-таранном суставе может быть охарактеризовано как подошвенное или тыльное сгибание, а анатомическое перемещение в подтаранном суставе может быть охарактеризовано как сочетание отведения и эверсии в равной мере или сочетание приведения и инверсии в равной мере.
На фиг.4-9 показано голеностопное ортопедическое устройство 56, конструкция которого основана на вышеописанном анализе и моделировании.
Устройство 56 содержит первую часть в виде первого соединительного плеча 58 для соединения с элементом 72 захвата ноги, вторую часть в виде элемента 60 захвата обуви для соединения с элементом 86 захвата стопы, и соединитель 62 для соединения первого соединительного плеча с элементом 60 захвата обуви. Соединитель 62 содержит первый регулятор 66, обеспечивающий первое регулирующее относительное перемещение первого соединительного плеча 58 и элемента 60 захвата обуви вокруг первой оси 150 поворота устройства в положении регулировки. Соединитель 62 содержит второй регулятор 64, обеспечивающий второе регулирующее относительное перемещение первого соединительного плеча 58 и элемента 60 захвата обуви вокруг второй оси 144 поворота устройства в положении регулировки. При использовании в закрепленном положении, в котором устройство 56 закреплено на ноге и стопе пользователя, первая ось (150) устройства по существу соответствует основной анатомической оси 50 поворота подтаранного сустава, а вторая ось 144 устройства по существу соответствует основной анатомической оси 44 поворота большеберцово-таранного сустава.
Специалисту будет очевидно, что термин "элемент захвата стопы" может означать элемент, выполненный с возможностью взаимодействия с босой стопой или предметом обуви, таким как туфля или ботинок. Сходным образом, специалисту будет очевидно, что термин "элемент захвата обуви" может означать элемент, выполненный с возможностью взаимодействия с любым подходящим предметом обуви, таким как подножка, туфля или ботинок.
Соединитель 62 содержит второе соединительное плечо, проходящее между первым и вторым регуляторами 66, 64 и разделяющее эти элементы в пространстве.
В положении регулировки первый регулятор 66 обеспечивает возможность первого поворотного регулирующего перемещения второго соединительного плеча 68 относительно элемента 60 захвата обуви вокруг первой оси 150 поворота устройства. В положении регулировки второй регулятор 64 обеспечивает возможность второго поворотного регулирующего перемещения второго соединительного плеча 68 относительно первого соединительного плеча 58 вокруг второй оси 144 поворота устройства.
Первое соединительное плечо 58 и второе соединительное плечо 68 должны быть выполнены таким образом, что они правильно располагают первый регулятор 66 и второй регулятор 64 относительно тела пользователя, и обеспечивают точное совпадение первой оси 150 поворота устройства и второй оси 144 поворота устройства. Оба соединительных плеча должны быть изготовлены из жесткого, но легковесного материала, такого как 30% стеклонейлон. Оба регулятора должны образовывать жесткую, но гладкую рабочую ось перемещения, способную выдерживать значительную силу кручения, необходимую для крепления или наклона стопы пользователя. Оба регулятора могут быть выполнены из стальной втулки, размещенной в нейлоновом рукаве. Устройство может быть выполнено из любых подходящих материалов, обеспечивающих достаточную прочность и свободную работу регуляторов под нагрузкой.
Согласно фиг.5-7:
Первая ось 150 поворота устройства первого регулятора 66 стягивает первый угол 152 устройства к поперечной плоскости 36 в сагиттальной плоскости 34 при прохождении от задней подошвенной части к передней дорсальной части, и стягивает второй угол 154 устройства к сагиттальной плоскости 34 в поперечной плоскости 36 при прохождении от задней боковой части к передней медиальной части.
В одном из примеров, первый угол 152 устройства в исходном положении может составлять 42°. В других примерах, первый угол 152 устройства в исходном положении может быть расположен в пределах от 32° до 52°, а более предпочтительно, может быть расположен в пределах от 37° до 47°.
В одном из примеров, второй угол 154 устройства в исходном положении может составлять 16°. В других примерах, второй угол 154 устройства в исходном положении может быть расположен в пределах от 8° до 24°, а более предпочтительно, может быть расположен в пределах от 12° до 20°.
Вторая ось 144 поворота устройства второго регулятора 64 стягивает третий угол 146 устройства к фронтальной плоскости 22 в поперечной плоскости 36 при прохождении от медиальной передней части к боковой задней части, и стягивает четвертый угол 148 устройства к поперечной плоскости 36 во фронтальной плоскости 22 при прохождении от медиальной дорсальной части к боковой подошвенной части.
В одном из примеров, третий угол 146 устройства в исходном положении может составлять 25°. В других примерах, третий угол 146 устройства может быть расположен в пределах от 15° до 35°, а более предпочтительно, может быть расположен в пределах от 20° до 30°.
В одном из примеров, четвертый угол 148 устройства в исходном положении может составлять 8°. В других примерах, четвертый угол 148 устройства может быть расположен в пределах от 3° до 13°, а более предпочтительно, может быть расположен в пределах от 6° до 10°.
В примере по фиг.4-9, элемент 86 захвата стопы выполнен в виде специальной обуви, в которой при использовании может быть размещена часть стопы 14. Обувь 86 содержит внешний относительно жесткий элемент 88 обуви и внутренний относительно гибкий элемент 90 подушки или подкладки.
Элемент 60 захвата обуви может быть прикреплен непосредственно к подходящей обуви или к некоторому виду крепления 92 обуви для взаимного закрепления элемента 60 захвата обуви и обуви 86. Крепление может обеспечивать линейную регулировку обуви 86 относительно элемента 60 захвата обуви.
На фиг.8 и 9 показан второй регулятор 64. Второй регулятор 64 образован совокупностью дисковидного регулятора 94, прикрепленного или формованного со вторым соединительным плечом 68, от которого проходит вал 96, и крышкообразного регулятора 95, снабженного по центру отверстием для образования рабочего контакта с валом 96. В собранном виде, вал 96 дисковидного регулятора 94 размещен в отверстии крышкообразного регулятора 95 для обеспечения регулирующего перемещения по необходимой оси перемещения. Второй регулятор 64 должен быть изготовлен таким образом, что он обеспечивает плавную работу и жесткость при перемещении даже при воздействии на него закрепляющих нагрузок.
Штыри 98 выступают из дисковидного регулятора 94. Второй регулятор 64 содержит вторые средства наклона, содержащие второй элемент 100 наклона в виде пружины кручения, и взаимодействующие с одним из штырей 98 и штырем или отверстием, выполненным на внутренней стороне крышкообразного регулятора 95. В одном из примеров, каждый регулятор 94 содержит шесть равномерно распределенных штырей 98, что обеспечивает возможность регулирования предварительно нагруженных сил кручения, прилагаемых пружиной в исходном положении. Второй элемент 100 наклона и предварительно нагруженная сила кручения обеспечивают приложение вторым регулятором усилия, приводящего к тыльному или подошвенному сгибанию элемента 60 захвата обуви относительно элемента 72 захвата ноги, в зависимости от силы кручения, приложенной элементом 100 наклона.
Конфигурация первого регулятора 66 сходна с конфигурацией второго регулятора 64, за исключением того, что дисковидный регулятор 94 прикреплен к элементу 60 захвата обуви, а крышкообразный регулятор 95 прикреплен или формован со вторым соединительным плечом 68. Первый регулятор 66 содержит первые средства наклона, содержащие первый элемент 100 наклона. В первом регулирующем элементе 66, элемент 100 наклона и предварительно нагруженная сила кручения обеспечивают приложение первым регулятором усилия, отводящего или приводящего элемент 60 захвата обуви относительно элемента 72 захвата ноги, в зависимости от силы кручения, приложенной элементом 100 наклона.
Каждый регулятор 64, 66 содержит ограничитель 102, содержащий язычок 104, выступающий из периферической части одного из регуляторов 94 или образующий часть указанного элемента, и задающий несколько ограничительных отверстий 106. Ограничитель 102 содержит два ограничительных стопора 108 в виде винтов, расположенных в двух ограничительных отверстиях 106. Ограничительные стопоры выполнены с возможностью удаления и повторного размещения. Ограничитель 102 содержит выступ 110, выступающий из другого регулятора 94 и расположенный между ограничительными стопорами 108. При использовании, взаимодействие выступа 110 со ограничительными стопорами 108 ограничивает соответствующее регулирующее перемещение.
Ограничители 102, и в частности, положения стопоров 108 в ограничительных отверстиях 106, задают максимальное относительное перемещение первого соединительного плеча и второго соединительного плеча для второго регулятора 64, и второго соединительного плеча 68 и элемента 60 захвата обуви для первого регулятора 66. В одном из примеров, язычок 104 задает 24 ограничительных отверстия 106, расположенные с интервалом в 5°. В одном из примеров, ограничитель 102 первого регулятора 64 может быть выполнен с возможностью обеспечения подошвенного сгибания до 90° и тыльного сгибания до 30°. В одном из примеров, ограничитель 102 второго регулятора 66 может быть выполнен с возможностью обеспечения инверсии/приведения до 60° и эверсии/отведения до 60°.
В примере по фиг.4-9, устройство 56 содержит элемент 72 захвата ноги, в котором при использовании может быть размещена часть ноги 12. Элемент 72 захвата ноги содержит относительно жесткий внешний элемент 74 и относительно мягкий и гибкий внутренний элемент 76 для обеспечения удобного контакта с ногой пользователя.
При использовании важно разместить элемент захвата ноги таким образом, что он правильно работает в качестве шины для стопы, способной одновременно закреплять оба основных сустава стопы и отклонять их. Это означает, что подтаранный сустав 42 совершает поворот с обеспечением отведения или приведения стопы, а большеберцово-таранный сустав 32 совершает поворот с обеспечением тыльного или подошвенного сгибания стопы.
На фиг.4 показана ножная накладка 72, проходящая вперед с медиальной стороны 116 на большее расстояние, чем с внешней боковой стороны 118. В примере по фиг.4, первое соединительное плечо 58 расположено в задней части устройства и проходит вдоль (?) медиальной стороны 116 ножной накладки 72, однако возможен ряд альтернативных конфигураций, обеспечивающих необходимую функцию при условии, что первое и второе соединительные плечи 58, 62 и первый и второй регуляторы 66, 64 обладают достаточной жесткостью и обеспечивают поворотное перемещение только по вышеописанным осям.
Важным признаком устройства 56 является возможность крепления или наклона подтаранного сустава без необходимости использования соединительного стержня между левой и правой стопами или использования ножной накладки, которая проходит над коленом и при использовании которой нога пациента должна быть по существу согнута в колене. На фиг.4A, 4B, 4C и 4D показан принцип решения указанной задачи, а также примерные конфигурации первого соединительного плеча 58 и ножной накладки 72.
На фиг.4A показан упрощенный вид в плане устройства 56, используемого в сочетании с подходящей обувью 86, причем обувь 86 плотно облегает стопу, но при этом обеспечивает свободное неограниченное перемещение подтаранного и большеберцово-таранного суставов. При условии, что нога 12 стабилизирована, перемещение обуви 86 соответствует перемещению стопы 14. Конфигурация первого и второго регуляторов 66, 64 и первого и второго соединительных плеч 58, 68 обеспечивает возможность перемещения стопы только по основным анатомическим осям подтаранного сустава 50 и большеберцово-таранного сустава 44.
На фиг.4А нога 12 показана в разрезе по линии Е-Е согласно фиг.4D. На фиг.4А показана правая стопа. Первое соединительное плечо 58 расположено сбоку. В данном примере, на первый регулятор 66 действует сила кручения вследствие воздействия элемента 100 наклона. Воздействие силы кручения необходимо для оказания действия силы F1 на первое соединительное плечо 58. Первое соединительное плечо 58 прикреплено к хомутам 112, в свою очередь соединенным с ножной накладкой 72. Сила F1 передается на ножную накладку таким образом, что она прилагает первую силу F2 крепления к ноге 12. Вектор силы F2 также показан на фиг.4D, на которой видно, что момент кручения М приложен по оси подтаранного сустава 50. Вследствие невозможности перемещения ножной накладки 72 и вследствие выполнения накладкой функции шины, стабилизирующей ногу 12 относительно стопы 14, итоговый результат заключается в отведении обуви 86 и, следовательно, стопы 14 по оси подтаранного сустава 50.
Степень достигнутого отведения определяется рядом факторов, включая состояние пользователя, мощность элемента 100 наклона и положение ограничителей 102. Для наглядности, второй регулятор 64 не показан на фиг.4A, однако специалисту будет очевидно, что поскольку ножная накладка 72 выходит за пределы задней центральной линии ноги, то может быть выполнено тыльное сгибание стопы по анатомической оси большеберцово-таранного сустава 44.
Преимущество конфигурации по фиг.4A заключается в том, что ножная накладка 72 выполняет функцию пращевидной повязки, натягиваемой с любой из двух сторон первым соединительным плечом 58 и хомутами 112. Таким образом, ножная накладка может быть выполнена из относительно мягких и гибких материалов, и следовательно, более удобна и комфортна для пользователя. Специалисту также будет очевидно, что указанная конфигурация может быть выполнена в обратном направлении для обеспечения приведения или подошвенного сгибания стопы.
На фиг.4B показан упрощенный вид в плане устройства 56, используемого в сочетании с подходящей обувью 86, причем обувь 86 плотно облегает стопу, но при этом обеспечивает свободное неограниченное перемещение подтаранного и большеберцово-таранного суставов. При условии, что нога 12 стабилизирована, перемещение обуви 86 соответствует перемещению стопы 14. Конфигурация первого и второго регуляторов 66, 64 и первого и второго соединительных плеч 58, 62 обеспечивает возможность перемещения стопы только по основным анатомическим осям подтаранного сустава 50 и большеберцово-таранного сустава 44.
На фиг.4B нога 12 показана в разрезе по линии E-E согласно фиг.4D. На фиг.4B показана правая стопа. Первое соединительное плечо 58 расположено медиально. В данном примере, на первый регулятор 66 действует сила кручения вследствие воздействия элемента 100 наклона. Воздействие силы кручения необходимо для оказания действия силы F на первое соединительное плечо 58. Сила F передается на ножную накладку 72 таким образом, что она прилагает первую силу F крепления к ноге 12.
Вектор силы F также показан на фиг.4D, на которой видно, что момент кручения M приложен по оси подтаранного сустава 50. Вследствие невозможности перемещения ножной накладки 72 и вследствие выполнения накладкой функции шины, стабилизирующей ногу 12 относительно стопы 14, итоговый результат заключается в отведении обуви 86 и, следовательно, стопы 14 по оси подтаранного сустава 50.
Степень достигнутого отведения определяется рядом факторов, включая состояние пользователя, мощность элемента 100 наклона и положение ограничителей 102. Для наглядности, второй регулятор 64 не показан на фиг.4B, но специалисту будет очевидно, что так как ножная накладка 72 выходит за пределы задней центральной линии ноги, может быть выполнено тыльное сгибание стопы по анатомической оси большеберцово-таранного сустава 44.
Преимущество конфигурации по фиг.4В заключается в том, что ножная накладка 72 может быть относительно небольшой при условии, что она выполнена из относительно жесткого материала. Специалисту также будет очевидно, что указанная конфигурация может быть выполнена в обратном направлении для обеспечения приведения или подошвенного сгибания стопы.
На фиг.4C показан упрощенный вид в плане устройства 56, используемого в сочетании с подходящей обувью 86, причем обувь 86 плотно облегает стопу, но при этом обеспечивает свободное неограниченное перемещение подтаранного и большеберцово-таранного суставов. При условии, что нога 12 стабилизирована, перемещение обуви 86 соответствует перемещению стопы 14. Конфигурация первого и второго регуляторов 66, 64 и первого и второго соединительных плеч 58, 62 обеспечивает возможность перемещения стопы только согласно основным анатомическим осям подтаранного сустава 50 и большеберцово-таранного сустава 44.
На фиг.4C нога 12 показана в разрезе по линии Е-Е согласно фиг.4D. На фиг.4C показана правая стопа. Первое соединительное плечо 58 расположено сзади. В данном примере, на первый регулятор 66 действует сила кручения вследствие воздействия элемента 100 наклона. Воздействие силы кручения необходимо для оказания действия силы F1 крепления на первое соединительное плечо 58. Первое соединительное плечо 58 прикреплено к жесткой ножной накладке 72. Сила F1 передается через жесткую ножную накладку 72 таким образом, что она прилагает первую силу F2 крепления к ноге 12.
Вектор силы F2 также показан на фиг.4D, на которой видно, что момент кручения М приложен по оси подтаранного сустава 50. Вследствие невозможности перемещения ножной накладки 72 и вследствие выполнения накладкой функции шины, стабилизирующей ногу 12 относительно стопы 14, итоговый результат заключается в отведении обуви 86 и, следовательно, стопы 14 по оси подтаранного сустава 50.
Степень достигнутого отведения определяется рядом факторов, включая состояние пользователя, мощность элемента 100 наклона и положение ограничителей 102. Для наглядности, второй регулятор 64 не показан на фиг.4C, но специалисту будет очевидно, что поскольку ножная накладка 72 выходит за пределы задней центральной линии ноги, то может быть выполнено тыльное сгибание стопы по анатомической оси большеберцово-таранного сустава 44.
Преимущество конфигурации по фиг.4C заключается в том, что первое соединительное плечо 58 удобно расположено на задней стороне ноги пользователя. Специалисту также будет очевидно, что указанная конфигурация может быть выполнена в обратном направлении для обеспечения приведения или подошвенного сгибания стопы.
Сходным образом, второй элемент 100 наклона второго регулятора 64 обеспечивает вторую силу крепления, представляющую собой силу кручения, направленную по второй оси 144 устройства. Таким образом, первый регулятор 66 содержит первые средства наклона для обеспечения первой силы крепления, а второй регулятор содержит вторые Средства наклона для обеспечения второй силы крепления, причем указанные силы при использовании устройства совместно и одновременно закрепляют стопу пользователя в любом из исходного положения, отведенного положения, приведенного положения, положения тыльного сгибания и/или положения подошвенного сгибания или в любом подходящем сочетании этих положений.
Устройство 56 может содержать регулируемое крепление 78 ножной накладки для взаимного прикрепления первого соединительного плеча 58 и ножной накладки 72. Регулируемое крепление 78 ножной накладки содержит несколько отверстий 80, заданных Первым соединительным плечом 58. Ножную накладку 72 размещают в канале 82, заданном относительно жестким внешним элементом 74 ножной накладки 72, с возможностью перемещения, и удерживают в выбранном положении посредством крепежа 84, такого как винт, болт или заклепка, проходящего через одно из отверстий 80 в снабженное резьбой отверстие (не показано), заданное относительно жестким внешним элементом 74 ножной накладки 72. Регулируемое крепление 78 ножной накладки обеспечивает возможность линейного регулирования ножной накладки 72 относительно первого соединительного плеча 58.
Устройство 56 содержит несколько пар закрепляющих хомутов 112, проходящих от закрепляющей части 72. Закрепляющие хомуты могут быть выполнены в виде любого подходящего элемента, например, в виде шнуров или, согласно фиг.4, в виде ремней. Устройство 56 также содержит крепежи 114 для взаимного скрепления хомутов 112. Крепежи 114 могут быть выполнены в виде любого подходящего элемента, например, в виде пряжек, шнуров или, согласно фиг.4, в виде текстильной застежки. Для облегчения понимания чертежей, хомуты 112 и крепежи 114 показаны только на фиг.4, но необходимо понимать, что указанные элементы присутствуют и на других видах данного примера реализации, а также в других сходных примеров реализации. Также необходимо понимать, что обувь 86 должна быть снабжена дополнительными хомутами, в особенности, в области заднего и среднего отделов стопы, для крепления пятки в обуви в правильном положении. Для наглядности, обувь 86 по фиг.4 снабжена только одним хомутом. В других примерах, количество закрепляющих элементов 112 и средства прикрепления закрепляющих элементов к закрепляющей части 72 и обуви 86 могут быть отличными.
На практике, ножная накладка 72, элемент 60 захвата обуви, первое соединительное плечо 58, второе соединительное плечо 68 и обувь 86 могут иметь различные размеры.
Измерения ноги 12 и стопы 14 могут быть выполнены до использования устройства, и могут быть выбраны детали соответствующих размеров. В одном из примеров, детали обеспечены отдельно, и устройство собирают из подходящих по размеру деталей. В другом примере, устройство 56 обеспечено в предварительно собранном виде и обеспечен ряд различных сочетаний размеров, из которого выбирают наиболее подходящее сочетание. Ортопедическое устройство 56 закрепляют на нижней конечности 10 пользователя таким образом, что нога 12 размещена в закрепляющей части 72, а стопа 14 размещена в обуви 86. Закрепляющие элементы 112 прикрепляют друг к другу. Регулируемое крепление 78 ножной накладки и крепление 92 обуви могут быть отрегулированы согласно вышеприведенному описанию.
Изначально, при подгонке устройства в регулирующее положение, ограничительные стопоры 108 могут быть удалены для облегчения регулирования или расположены рядом Друг с другом, или могут быть размещены таким образом, что они удерживают устройство 56 в исходном положении, без отведения или приведения и без тыльного или подошвенного сгибания. При подгонке стопа 14 может быть перемещена в новое положение, а ограничительные стопоры 108 могут быть установлены таким образом, что они закрепляют стопу в ограниченном положении. В ограниченном положении, относительное перемещение первого соединительного плеча 58 и второго соединительного плеча 68, а также второго соединительного плеча 68 и элемента 60 захвата обуви, ограничено относительно перемещения, допускаемого в регулирующем положении. В ограниченном положении перемещение в большеберцово-таранном и подтаранном суставах может быть предотвращено, или, в большинстве случаев, может быть допущена некоторая степень перемещения, что обеспечивает возможность выполнения пользователем физической нагрузки в виде сопротивления силам кручения, прилагаемым элементами 100 наклона.
В случаях, когда пациент страдает от варуса, приведения и эквинуса, устройство 56 обычно выполнено с возможностью ограничения варуса, отведения и подошвенного сгибания, а также с возможностью крепления или наклона стопы в положение вальгуса, отведения и тыльного сгибания, согласно фиг.4A-4D. При других заболеваниях, устройство может быть выполнено с возможностью крепления или наклона стопы в противоположном направлении.
Устройство 56 обеспечивает соответствие анатомическим перемещениям обоих основных суставов стопы одновременно. Вследствие того, что устройство 56 выполнено с возможностью отведения (и, при необходимости, приведения) стопы без необходимости крепления колена в согнутом положении или использования жесткой соединительного стержня, расположенной между стопами, устройство впервые обеспечивает возможность использования динамического устройства, обеспечивающего возможность усовершенствованного и более приемлемого терапевтического лечения множества заболеваний стоп. Устройство 56 может быть использовано с любой подходящей обувью при условии, что указанная обувь может быть прочно прикреплена к элементу 60 захвата обуви.
На фиг.10-22 показаны другие примеры реализации изобретения, многие элементы которых сходны с вышеописанными элементами, описанными в примере реализации по фиг.4-9. Таким образом, для краткости, в нижеследующих примерах реализации описаны только отличия от вышеописанного примера реализации. При использовании идентичных или сходных элементов использованы идентичные позиции на чертежах, а описание указанных элементов опущено. Подразумевается, что способы использования нижеследующих примеров реализации сходны со способами, описанными для вышеприведенных примеров реализации, если не указано обратное.
На фиг.10 показана часть второго ортопедического устройства 156, в котором второй регулятор содержит индикатор 120, содержащий несколько меток 122, отображающих, например, угол поворота относительно исходного положения. Первый регулятор (на фиг.10 не показан) также может содержать индикатор 120. Во втором регулирующем элементе 164, отображенные значения угла могут в первую очередь относиться к углу тыльного или подошвенного сгибания. Во втором регулирующем элементе, отображенные значения угла могут в первую очередь относиться к углу инверсии/приведения или эверсии/отведения.
Индикатор 120 обеспечивает возможность воспроизведения установки положения, а также обеспечивает возможность свободного отслеживания пользователем и лечащим врачом прогресса в ходе курса лечения, что обеспечивает психологический стимул и мотивацию. Индикатор 120 может также способствовать отслеживанию степени перемещения при физической нагрузке, выполняемой пользователем при сопротивлении наклону, оказываемому пружинами 100, что также обеспечивает психологический стимул и мотивацию.
На фиг.13 и 14 показано третье ортопедическое устройство 356, содержащее элемент 72 захвата ноги, первое соединительное плечо 58 для соединения с элементом 72 захвата ноги, и элемент 60 захвата обуви для соединения с первым соединительным плечом 58 и обувью 86. Данное устройство содержит только один регулятор 66, соответствующий первому регулирующему элементу 66 первого примера реализации. Таким образом, третье ортопедическое устройство 356 обеспечивает возможность регулирующего перемещения только вокруг первой оси 140 поворота устройства при использовании в закрепленном виде соответствующей оси 50 поворота подтаранного сустава. Устройство 356 может быть использовано, например, в случаях необходимости терапевтического лечения, включающего только перемещение стопы 14 вокруг оси 50 поворота подтаранного сустава.
Сходным образом, в других примерах реализации, не показанных на чертежах, устройство по настоящему изобретению может содержать только один регулятор, соответствующий второму регулирующему элементу 64 первого примера реализации.
На фиг.17 и 18 показано четвертое ортопедическое устройство 556, содержащее элемент 572 захвата ноги, первое соединительное плечо 58 для соединения с элементом 572 захвата ноги и вторым соединительным плечом 68, второе соединительное плечо 68 для соединения с первым соединительным плечом 58 и элементом 586 захвата стопы, содержащим два разнесенных в пространстве регулятора 564, 566, содержащих второй регулятор 564, в регулирующем положении обеспечивающий второе поворотное регулирующее перемещение первого соединительного плеча 58 относительно второго соединительного плеча 68 вокруг второй оси 144 поворота устройства, и первый регулятор 566, в регулирующем положении обеспечивающий первое поворотное регулирующее перемещение второго соединительного плеча 68 относительно элемента 586 захвата стопы вокруг первой оси 150 поворота устройства.
В данном примере, элемент 572 захвата ноги и элемент 586 захвата стопы имеют более Простую конструкцию, чем в первом примере реализации, причем элемент 572 захвата ноги и элемент захвата стопы выполнены из относительно жесткого, но деформируемого материала. Сходно с предыдущими примерами реализации, первое и второе соединительные плечи 58, 62 и регуляторы 566, 564 выполнены из легкого, но жесткого материала. Регуляторы 564, 566 также имеют более простую конструкцию, чем в приведенном выше описании, и могут, например, содержать храповую передачу 126, обеспечивающую возможность регулирования каждого регулятора только в одном направлении.
При лечении некоторых заболеваний стопы, в особенности врожденных состояний у младенцев и маленьких детей, может быть необходимо размещение нижней конечности в гипсовой повязке для ее иммобилизации в предписанном положении отведения или приведения, и тыльного или подошвенного сгибания. Нанесение гипсовой повязки с последующим сохранением стопы 14 в необходимом положении может быть затруднительным, и зачастую требует усилий нескольких опытных врачей. Кроме того, в случае использования гипсовой повязки неидеальной формы, повязка может соскальзывать. В данном примере реализации, стопу размещают на элементе 586 захвата стопы, а элемент 572 захвата ноги прикладывают к голени. Затем стопу приводят в необходимое положение. Элементы 572 и 586 захвата ноги и стопы формуют согласно требованиям, а затем стопу приводят в необходимое положение. Относительно жесткие соединительные плечи и регуляторы способствуют процессу приведения стопы в необходимое положение, а храповые передачи способствуют сохранению необходимого положения при нанесении марлевой и гипсовой повязок.
Использование четвертого ортопедического устройства 556 по настоящему изобретению обеспечивает возможность сохранения правильного положения при нанесении гипсовой повязки и возможность уменьшения риска соскальзывания гипсовой повязки с обеспечением, таким образом, увеличения эффективности лечения и удобства пациента. Использование четвертого ортопедического устройства 556 в качестве шины обеспечивает более уверенное нанесение гипсовой повязки менее опытными врачами. Храповая передача 126 обеспечивает легкое и быстрое регулирование. Таким образом, четвертое ортопедическое устройство 556 обеспечивает регулируемую одноразовую шину, способствующую процессу гипсования стопы и ноги для сохранения подтаранного и большеберцово-таранного суставов в точно заданном положении.
На фиг.19 показано пятое ортопедическое устройство 656, содержащее элемент 72 захвата ноги, первое соединительное плечо 58 для соединения с элементом 72 захвата ноги и вторым соединительным плечом 68, второе соединительное плечо 68 для соединения с первым соединительным плечом 58 и элементом 60 захвата обуви (на фиг.19 не показан), и два разнесенных в пространстве регулятора 664, 666, содержащих второй регулятор 664, в регулирующем положении обеспечивающий второе поворотное регулирующее перемещение первого соединительного плеча 58 относительно второго соединительного плеча 68 вокруг второй оси 144 поворота устройства, и первый регулятор 666, в регулирующем положении обеспечивающий первое поворотное регулирующее перемещение второго соединительного плеча 68 относительно элемента 60 захвата обуви вокруг первой оси 150 поворота устройства.
В данном примере, регуляторы 664, 666 имеют более простую конструкцию, чем в вышеприведенном описании, и в одном примере, каждый регулятор может содержать крепеж 628, образующий соответствующую ось 144, 150 поворота. Крепеж 628 может быть выполнен в виде болта или винта, который может быть ослаблен или затянут для перемещения соответствующего регулятора 664, 666 в регулирующее положение или ограниченное положение, соответственно. В ограниченном положении, соответствующий регулятор 664, 666 по существу закреплен на месте.
На фиг.20 и 21 показано шестое ортопедическое устройство 756, содержащее элемент 72 захвата ноги, первое соединительное плечо 58 для соединения с элементом 72 захвата ноги и вторым соединительным плечом 68, второе соединительное плечо 68 для соединения с первым соединительным плечом 58 и элементом 60 захвата обуви (на фиг.20 и 21 не показан), и два разнесенных в пространстве регулятора 64, 66, содержащих второй регулятор 64, в регулирующем положении обеспечивающий второе поворотное регулирующее перемещение первого соединительного плеча 58 относительно второго соединительного плеча 68 вокруг второй оси 144 поворота устройства, и первый регулятор 66, в регулирующем положении обеспечивающий первое поворотное регулирующее перемещение второго соединительного плеча 68 относительно элемента 60 захвата обуви вокруг первой оси 150 поворота устройства.
В данном примере, устройство 756 сходно с первым примером реализации устройства 56, за исключением того, что второе соединительное плечо 68 проходит наружу сбоку от первого регулятора 66 ко второму регулирующему элементу 64, расположенному сбоку. Преимущество заключается в том, что при подобном размещении пользователю легче ходить, так как первые регуляторы 64 двух устройств 756 на двух нижних конечностях не сталкиваются и не мешают друг другу.
На фиг.22 показано седьмое ортопедическое устройство 856, содержащее элемент 72 захвата ноги, первое соединительное плечо 58 для соединения с элементом 72 захвата ноги и вторым соединительным плечом 68, второе соединительное плечо 68 для соединения с первым соединительным плечом 58 и элементом 60 захвата обуви (на фиг.22 не показан), и три разнесенных в пространстве регулятора 64, 66, содержащих два вторых регулятора 64, в регулирующем положении обеспечивающих второе поворотное регулирующее перемещение первого соединительного плеча 58 относительно второго соединительного плеча 68 вокруг второй оси 144 поворота устройства, и первый регулятор 66, в регулирующем положении обеспечивающий первое поворотное регулирующее перемещение второго соединительного плеча 68 относительно элемента 60 захвата обуви вокруг первой оси 150 поворота устройства.
Один из двух разнесенных в пространстве вторых регуляторов 64 расположен на медиальной стороне, а другой элемент расположен на боковой стороне. Второе соединительное плечо 68 содержит элемент-распорку 68, проходящий медиально от второго регулятора 66 до медиального второго регулятора 64, и другой элемент-распорку 68, проходящий сбоку от первого регулятора 66 до бокового второго регулятора 64. Два вторых регулятора 64 обеспечивают дополнительную прочность устройства 856.
Могут быть выполнены различные другие модификации, не выходящие за рамки объема настоящего изобретения. Ортопедическое устройство и его различные компоненты могут иметь любой подходящий размер и могут быть выполнены из любого подходящего материала или материалов. Регуляторы могут быть обеспечены любым подходящим образом, и могут отличаться от описанных. Наклон может быть обеспечен другим образом. Например, наклон может быть обеспечен посредством эластичных хомутов или лент.
Любые элементы любого из показанных или описанных примеров реализации могут быть комбинированы любым подходящим образом в рамках объема настоящего раскрытия.
Таким образом, обеспечено ортопедическое устройство, обеспечивающее соответствие анатомическим перемещениям обоих основных суставов стопы одновременно. Устройство выполнено с возможностью отведения (и, при необходимости, приведения) стопы без необходимости крепления колена в согнутом положении или использования жесткой соединительного стержня, расположенной между стопами. Устройство впервые обеспечивает использование динамического устройства, обеспечивающего возможность усовершенствованного и более приемлемого терапевтического лечения множества заболеваний стоп. Таким образом, решены многие проблемы, связанные с использованием известных ортопедических устройств.
По сравнению с известными аппаратами для отведения (или приведения) стопы, основанных на принципе соединительного стержня, настоящее устройство обеспечивает возможность пользователю свободно ходить и бегать, и следовательно, это устройство может быть использовано для терапевтического лечения днем и ночью; работа устройства не нарушается при повороте бедер и колен; устройство не создает напряжения на бедра и колени; устройство может быть использовано на одной нижней конечности; устройство менее заметно и более приемлемо для пациентов и родителей; устройство обеспечивает возможность более точного терапевтического лечения и измерения прогресса лечения; устройство может обеспечить возможность одновременного терапевтического лечения подтаранного и большеберцово-таранного суставов.
По сравнению с известными аппаратами для отведения (или приведения) стопы, основанных на принципе крепления колена в согнутом состоянии, настоящее устройство обеспечивает возможность пользователю свободно ходить и бегать, и следовательно, может быть использовано для терапевтического лечения днем и ночью; устройство обеспечивает возможность перемещения ноги и развитие (или поддержание развитого состояния) мышц и не оказывает негативного влияния на развитие мышц; устройство менее заметно и более приемлемо для пациентов и родителей; устройство обеспечивает возможность более точного терапевтического лечения и измерения прогресса лечения; устройство может обеспечивать возможность одновременного терапевтического лечения подтаранного и большеберцово-таранного суставов.
По сравнению с известными аппаратами для лечения свисания стопы и другими универсальными ортезами для голеностопного сустава, устройство обеспечивает возможность пользователю ходить и бегать с обеспечением более нормальной походки вследствие того, что устройство одновременно поддерживает анатомически правильное перемещение большеберцово-таранного и подтаранного суставов; устройство может обеспечивать возможность одновременного терапевтического лечения подтаранного и большеберцово-таранного суставов.

Группа изобретений относится к медицинской технике, а именно к голеностопным ортопедическим устройствам. Голеностопное ортопедическое устройство содержит первую часть для соединения с элементом захвата ноги, вторую часть для соединения с элементом захвата стопы и соединитель для соединения первой и второй частей. Соединитель содержит первый регулятор, обеспечивающий возможность первого регулирующего относительного перемещения первой и второй частей вокруг первой оси поворота устройства в положении регулировки, и содержит второй регулятор, обеспечивающий возможность второго регулирующего относительного перемещения первой и второй частей вокруг второй оси поворота устройства в положении регулировки. При использовании в закрепленном положении, в котором устройство прикреплено к ноге и стопе пользователя, первая ось устройства по существу соответствует основной анатомической оси поворота подтаранного сустава, а вторая ось устройства по существу соответствует основной анатомической оси поворота большеберцово-таранного сустава. Шина для способствования иммобилизации части тела содержит вышеуказанное голеностопное ортопедическое устройство. Изобретения обеспечивают возможность использования геометрии перемещения для создания динамического ортопедического устройства, выполненного с возможностью закрепления или наклона подтаранного сустава без необходимости использования соединительных стержней или крепления и сгибания колена. 2 н. и 10 з.п. ф-лы, 22 ил.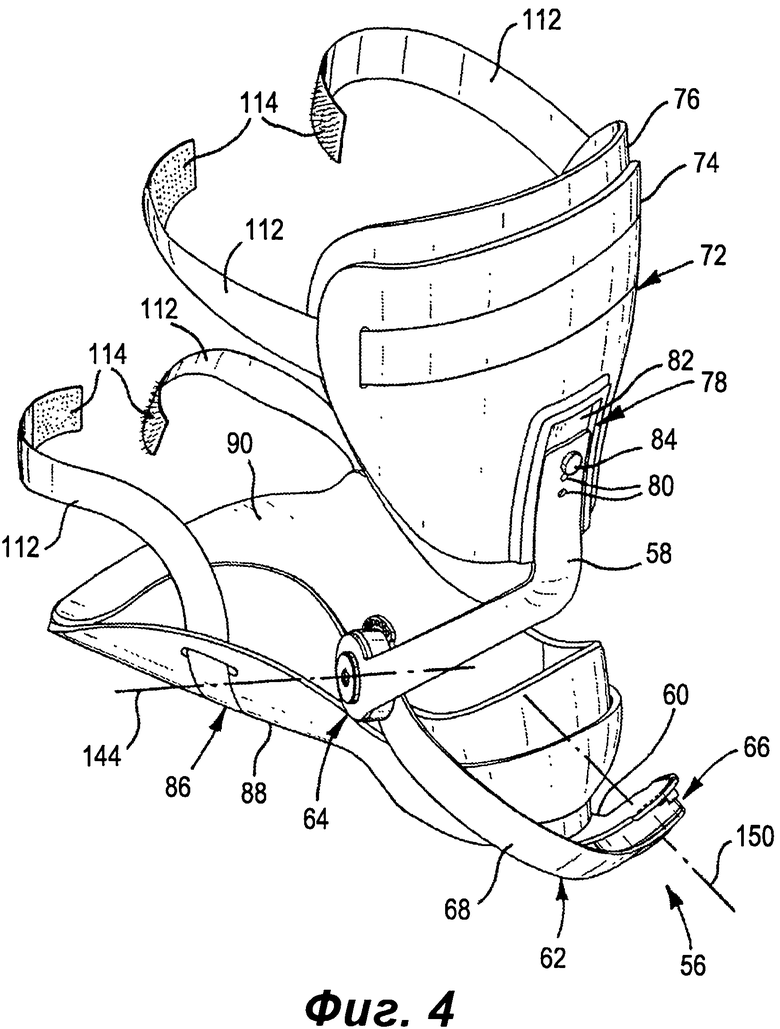
1. Голеностопное ортопедическое устройство, содержащее первую часть для соединения с элементом захвата ноги, вторую часть для соединения с элементом захвата стопы и соединитель для соединения первой и второй частей, причем соединитель содержит первый регулятор, обеспечивающий возможность первого регулирующего относительного перемещения первой и второй частей вокруг первой оси поворота устройства в положении регулировки, и содержит второй регулятор, обеспечивающий возможность второго регулирующего относительного перемещения первой и второй частей вокруг второй оси поворота устройства в положении регулировки, при этом при использовании в закрепленном положении, в котором устройство прикреплено к ноге и стопе пользователя, первая ось устройства по существу соответствует основной анатомической оси поворота подтаранного сустава, а вторая ось устройства по существу соответствует основной анатомической оси поворота большеберцово-таранного сустава.
2. Устройство по п. 1, в котором первая и вторая оси устройства по существу выровнены вдоль оси подтаранного сустава и оси большеберцово-таранного сустава соответственно.
3. Устройство по п. 1 или 2, в котором первый регулятор содержит первые средства наклона для обеспечения первой силы крепления для закрепления подтаранного сустава пользователя в отведенном, исходном или приведенном положении при использовании устройства.
4. Устройство по п. 3, в котором первая сила крепления представляет собой силу кручения.
5. Устройство по п. 3, в котором первые средства наклона содержат первый элемент наклона.
6. Устройство по любому из пп. 1, 2, 4 или 5, в котором второй регулятор содержит вторые средства наклона для обеспечения второй силы крепления для закрепления большеберцово-таранного сустава пользователя в положении тыльного сгибания, исходном положении или положении подошвенного сгибания при использовании устройства.
7. Устройство по п. 6, в котором вторая сила крепления представляет собой силу кручения.
8. Устройство по п. 6, в котором вторые средства наклона содержат второй элемент наклона.
9. Устройство по п. 6, в котором первый регулятор содержит первые средства наклона для обеспечения первой силы крепления, а второй регулятор содержит вторые средства наклона для обеспечения второй силы крепления, причем первая и вторая силы крепления при использовании устройства совместно и одновременно закрепляют стопу пользователя в любом из исходного положения, отведенного положения, приведенного положения, положения тыльного сгибания и/или положения подошвенного сгибания или любом подходящем сочетании этих положений.
10. Устройство по п. 1 или 2, в котором первый регулятор и/или второй регулятор содержит индикатор, показывающий относительную степень регулирующего перемещения.
11. Устройство по п. 1 или 2, в котором голеностопное ортопедическое устройство содержит элемент захвата ноги, содержащий закрепляющую часть, в которой обеспечена возможность вставки части нижней конечности, составляющей голень.
12. Шина для способствования иммобилизации части тела, содержащая голеностопное ортопедическое устройство по любому из пп. 1-11.
| DE 29909113 U1, 18.11.1999 | |||
| ОРТЕЗ НА ГОЛЕНОСТОПНЫЙ СУСТАВ ДЛЯ ДЕТЕЙ С ПОСЛЕДСТВИЯМИ ДЦП | 2003 |
|
RU2320299C2 |
| Устройство для лечения переломов лодыжек | 1988 |
|
SU1532029A1 |
| Устройство для проходки скважин взрывами | 1945 |
|
SU68916A1 |
| US 4934355 A, 19.06.1990. | |||

