Область техники, к которой относится изобретение
Данное изобретение относится к автомобилю с механической трансмиссией, а именно к системе прогнозирования, какая передача трансмиссии будет включена следующей.
Уровень техники
Из уровня техники известно, что для определения, какая передача в данный момент включена, используют датчик положения передачи, генерирующий сигнал, который может быть использован устройством электронного управления моторного транспортного средства. Такие датчики передачи, включая датчик передачи заднего хода, можно использовать для установления текущего положения передачи. Однако они могут вычислять только дискретные положения передачи после того, как она была включена, и не могут предоставить какой-либо информации о направлении выполняемого изменения передачи, то есть о том, какую передачу водитель намеревается включить. Данная информация является очень полезной и может предоставить системе обработки данных моторного транспортного средства предварительное указание о направлении смены передачи водителем и, таким образом, позволяет системе быстрее отвечать на запросы водителя.
Также многие датчики передачи устанавливают за пределами трансмиссии для считывания положения рычага переключения передач, и, за счет этого возникают неточности вследствие износа при большом количестве переключений на протяжении срока службы моторного транспортного средства.
Во время некоторых операция трансмиссии моторного транспортного средства, таких как изменение передачи с такими известными датчиками в результате появляется период времени, в котором передача, которая будет выбрана, не известна, и становится известной лишь после осуществления переключения.
Также известно использование сопоставления данных о скорости моторного транспортного средства и частоте вращения двигателя для определения текущей передачи трансмиссии. Однако данный способ неприменим при отключенной линии привода, например, когда нажата педаль сцепления, а, значит, при переключении передачи происходит вынужденная задержка любых вычислений нового положения передачи вплоть до завершения переключения, то есть когда передача полностью выбрана и муфта сцепления повторно включена.
Кроме того, использование сопоставления данных скорости моторного транспортного средства и частоты вращения двигателя не является надежным при пробуксовке или заносе моторного транспортного средства вследствие плохого сцепления с поверхностью дорожного покрытия.
Любые задержки при получении информации о включенной передаче могут быть проблематичными для таких систем управления в моторном транспортном средстве, которым необходима эта информация, например, для системы согласования переключения передач (GSH). Согласование переключения передач - это способ, в котором частота вращения двигателя сопоставляется с выбранной передачей в процессе ее изменения для того, чтобы сделать процесс переключения между передачами более гладким.
Несвоевременная или неточная информация может также отрицательно повлиять на интерфейс водителя (HMI), в котором на приборной панели отображается информация о текущем состоянии моторного транспортного средства, что может напрямую сказаться на удовлетворенности потребителя.
В некоторых моторных транспортных средствах со старт-стопной системой используют датчики нейтральной передачи (GNS). Однако они могут определять только нейтральное положение, положение четной передачи и положение нечетной передачи. Они не могут дать подробной информации о конкретной включенной на данный момент передаче и направлении дальнейшего переключения.
Задачей настоящего изобретения является обеспечение системы прогнозирования передачи, которая может предсказать, какая передача будет включена, до того, как она фактически включена.
Раскрытие изобретения
Первый аспект изобретения предусматривает систему прогнозирования передачи для многоступенчатой механической трансмиссии с механизмом переключения передач Н-типа, включающим в себя селекторный элемент переключения передач, который приводится в движение в ответ на движение рычага переключения передач в угловом и осевом направлениях. Система содержит первый датчик для считывания вращательного движения селекторного элемента переключения передач, и второй датчик для считывания осевого движения селекторного элемента переключения передач, а также электронный блок обработки данных для получения и обработки сигналов, поступающих от первого и второго датчиков. Электронный блок обработки данных выполнен с возможностью обеспечения выходного сигнала о предсказанной передаче, которая будет включена, на основании сигналов, полученных от первого и второго датчиков.
Блок обработки данных может быть выполнен с возможностью осуществления прогнозирования, какая передача будет включена следующей, на основании данных о том, что достигнута и пройдена по меньшей мере одна из заранее определенных контрольных точек.
Селекторный элемент переключения передач может иметь двухкоординатную магнитную мишень, а также первый и второй датчики, образующими единый массив двухкоординатных датчиков.
Механизм переключения передач Н-типа может характеризоваться совокупностью плоскостей перемещения рычага переключения передач, и сигнал второго датчика может быть использован электронным блоком обработки данных для определения того, в какой из плоскостей находится рычаг переключения передач.
Селекторный элемент переключения передач может поворачиваться между первой, второй и третьей угловыми позициями, соответствующими положениям переключения для первого и второго рядов передач и нейтрального положения. При этом между первым и третьим угловыми положениями может быть установлена первая контрольная точка в угловом положении, после которого действующие силы переводят селекторный элемент переключения передач в первое угловое положение. Когда сигнал с первого датчика указывает, что угловое положение селекторного элемента переключения передач соответствует первой контрольной точке, электронный блок обработки данных использует это как указание на то, что включаемая передача относится к первому ряду передач.
Селекторный элемент переключения передач может поворачиваться между первым, вторым и третьим угловыми положениями, соответствующими положениям переключения для первого и второго рядов передач и нейтрального положения. При этом между вторым и третьим угловыми положениями может быть установлена вторая точка включения передачи, при прохождении через которую действующие силы переводят селекторный элемент переключения передач во второе угловое положение. Когда сигнал с первого датчика указывает, что угловое положение селекторного элемента переключения передач соответствует второй точке включения передачи, электронный блок обработки данных использует это как указание на то, что включаемая передача относится ко второму ряду передач.
Электронный блок управления может быть выполнен с возможностью объединять прогнозирование ряда передачи, осуществленное на основании сигнала первого датчика, с информацией о плоскости рычага переключения передач, полученной на основании сигнала от второго датчика для формирования выходного сигнала о прогнозируемой передаче.
Электронный блок обработки данных может быть выполнен с возможностью определять, усиливается или ослабевает сигнал второго датчика, и использовать это как предварительный прогноз, какой будет следующая включенная передача - более высокой или более низкой, чем выбранная ранее.
Между смежными плоскостями рычага переключения передач может быть предусмотрена по меньшей мере одна контрольная точка промежуточной плоскости. Электронный блок обработки данных может быть выполнен с возможностью получения данных о том, какой будет следующая включенная передача - более высокой или более низкой, чем выбранная ранее, основываясь на данных о прохождении контрольных точек промежуточных плоскостей.
Между плоскостями рычага переключения передач могут быть предусмотрены контрольные точки промежуточной плоскости повышения и понижения передачи.
Первый ряд передач может содержать все нечетные передние передачи, а второй ряд - все четные передние передачи.
Согласно второму аспекту изобретения представлено моторное транспортное средство, имеющее систему прогнозирования передачи, выполненную в соответствии с вышеизложенным первым аспектом изобретения.
Согласно третьему аспекту изобретения представлен способ прогнозирования передачи, которая будет включена в многоступенчатой механической трансмиссии с механизмом переключения передач Н-типа. Согласно способу выбираемые передачи расположены двумя рядами и в совокупности параллельных плоскостей рычага переключения передач. Механизм переключения передач содержит селекторный элемент переключения передач, приводимый в движение рычагом переключения передач в угловом и осевом направлениях для осуществления включения выбираемых передач. При этом способ включает в себя определение углового и осевого положений селекторного элемента переключения передач и, на основании определенных осевого и углового положений, прогнозирование следующей включаемой передачи.
Также способ может включать в себя определение осевого положения селекторного элемента переключения передач, установление заранее определенных угловых точек, сравнение его с угловым положением селекторного элемента переключения передач, и, если угловое положение переключателя передач достигает одной из предварительно определенных угловых точек, использование этого в совокупности с известным осевым положением селекторного элемента переключения передач как указание на то, что передача, соответствующая достигнутой точке и осевому положению, предположительно является следующей включаемой передачей.
Способ также может включать в себя определение осевого положения, в котором перемещается селекторный элемент переключения передач, и использование направления его движения в качестве предварительных данных о том, будет ли следующая выбранная передача более высокой или более низкой, чем ранее выбранная передача.
Способ может дополнительно включать в себя установку по меньшей мере одной контрольной точки промежуточной плоскости между соседними плоскостями рычага переключения передач, определение, была ли пройдена какая-либо из этих точек промежуточной плоскости, использование этой информации в качестве предварительных данных о том, будет ли следующая выбранная передача более высокой или более низкой, чем ранее выбранная передача.
Краткое описание чертежей
Далее изобретение будет описано с помощью примеров со ссылкой на сопроводительные чертежи, на которых:
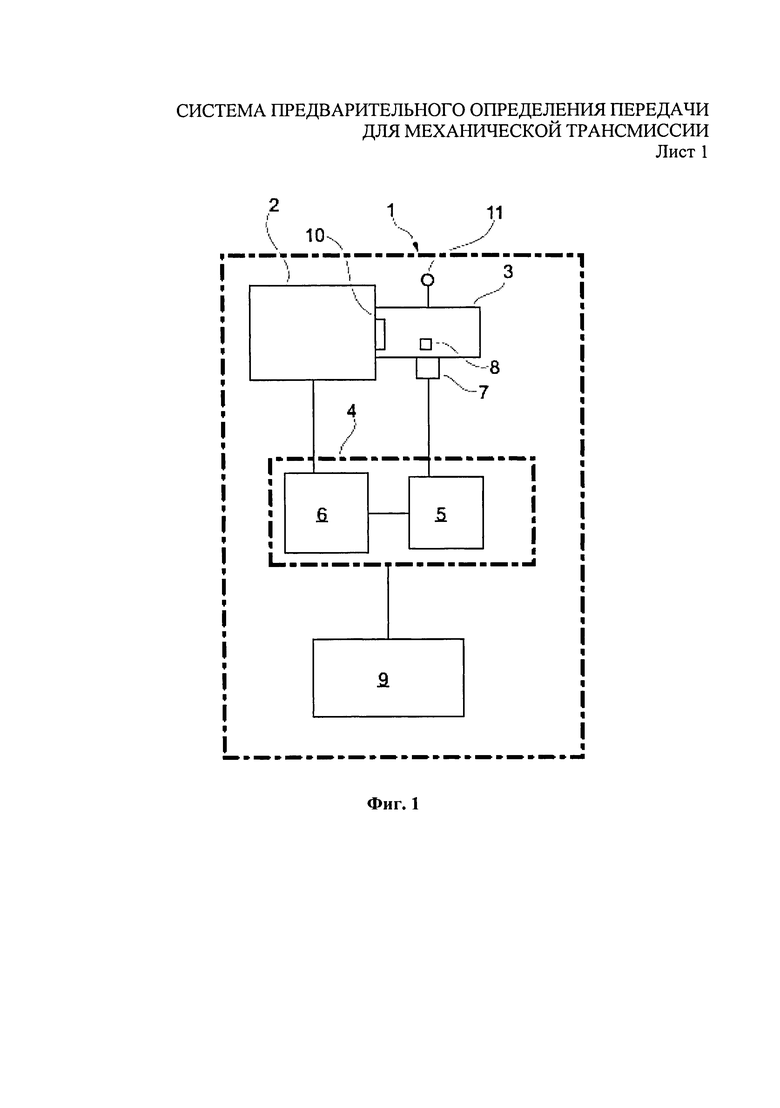
Фиг.1 представляет собой схематическое изображение транспортного средства согласно одному из аспектов изобретения;
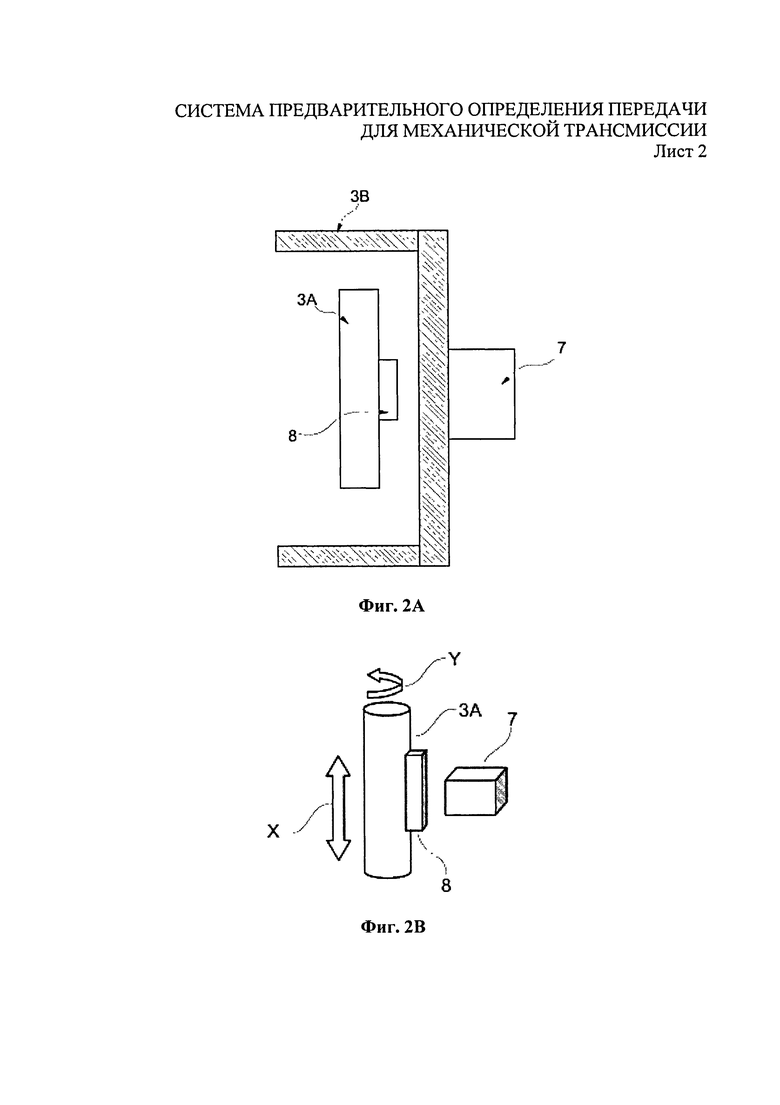
Фиг.2А представляет собой схематическое изображение части трансмиссии транспортного средства, показанного на Фиг.1, изображающее расположение двухкоординатного датчика выбранной передачи и двухкоординатной магнитной мишени;
Фиг.2В представляет собой схематическое изображение, показывающее движения поворотного селекторного цилиндра переключения передач, осевое (по оси X) и угловое (по оси Y) положения которого считываются двухкоординатным датчиком выбранной передачи;
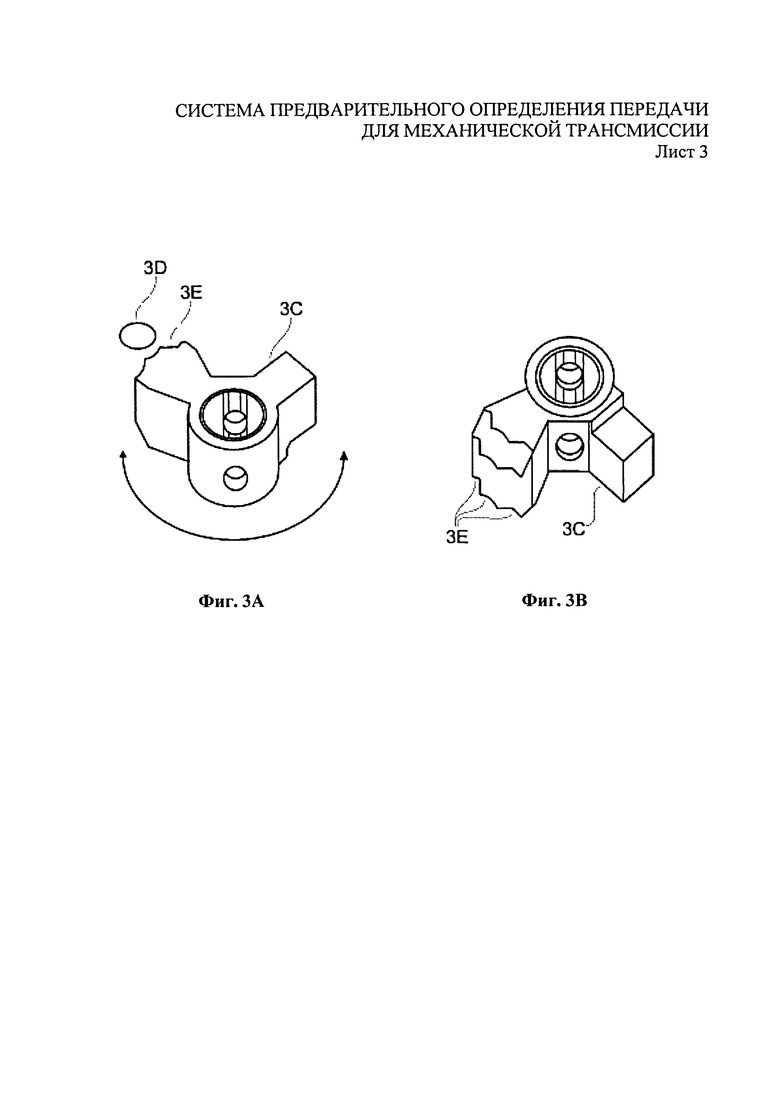
Фиг.3А представляет собой первое схематическое изображение ведомого механизма поворотного селекторного цилиндра;
Фиг.3В представляет собой второе схематическое изображение ведомого механизма поворотного селекторного цилиндра, изображенного на Фиг.3А;
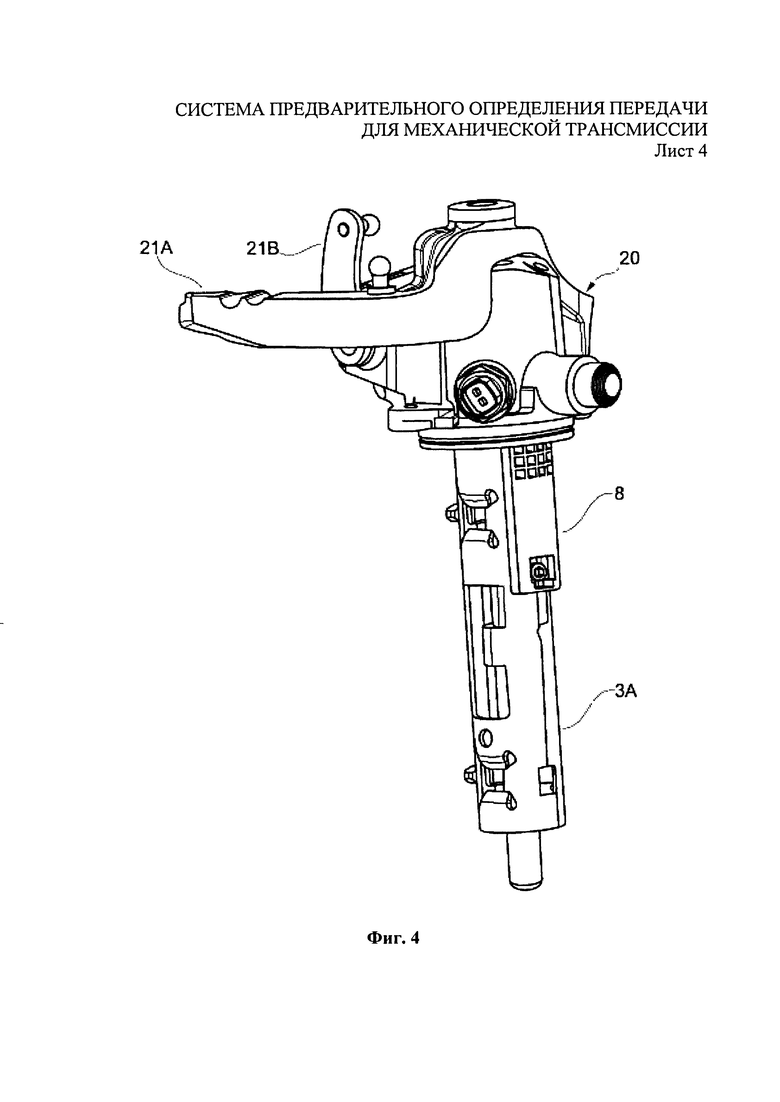
Фиг.4 представляет собой схематическое изображение поворотного механизма переключения передачи трансмиссии, более подробно изображающее поворотный селекторный цилиндр переключения передач, показанный на Фиг.2В;
Фиг.5 представляет собой более подробное изображение части трансмиссии, изображенной на Фиг.2А, показывающее положение двухкоординатной мишени и массива двухкоординатных магнитных датчиков;
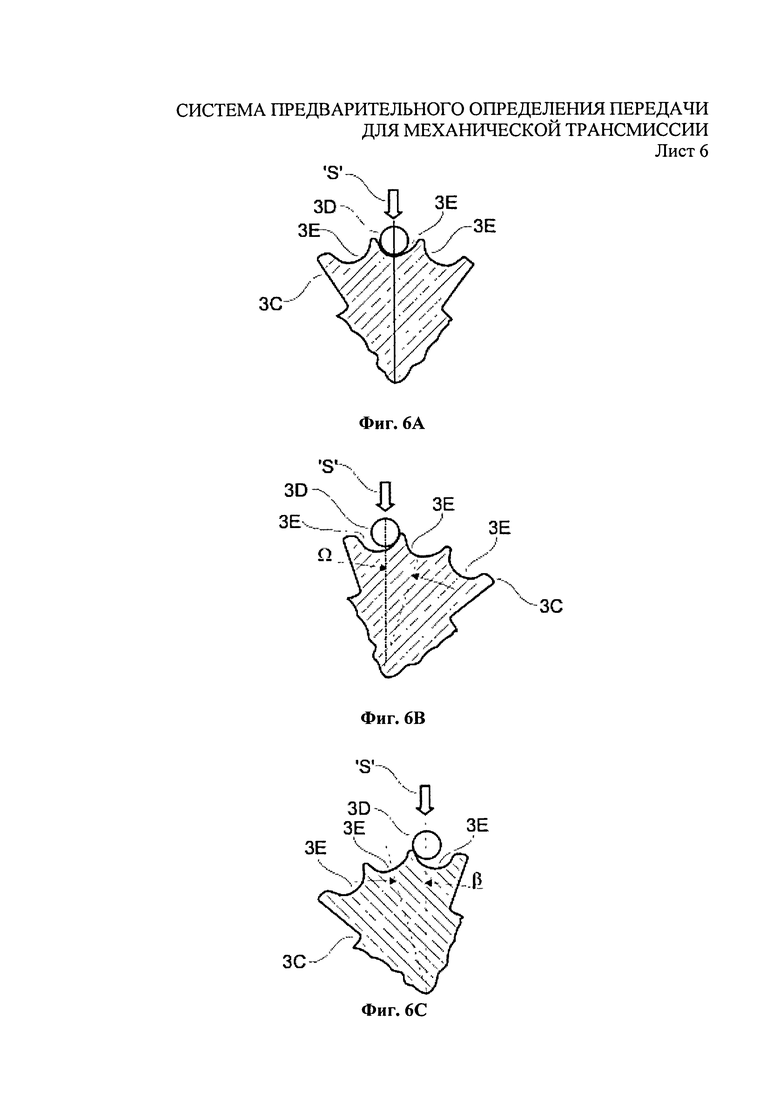
Фиг.6А представляет собой увеличенное сечение части ведомого механизма поворотного селекторного цилиндра с Фиг.3А и Фиг.3В, показывающее ведомый механизм поворотного селектора в положении нейтральной передачи;
На Фиг.6В показано увеличенное сечение части ведомого механизма поворотного селекторного цилиндра с Фиг.3А и Фиг.3В, показывающее ведомый механизм поворотного селектора в положении включенной четной передачи;
На Фиг.6С показано увеличенное сечение части ведомого механизма поворотного селекторного цилиндра с Фиг.3А и Фиг.3В, показывающее ведомый механизм поворотного селектора в положении включенной нечетной передачи;
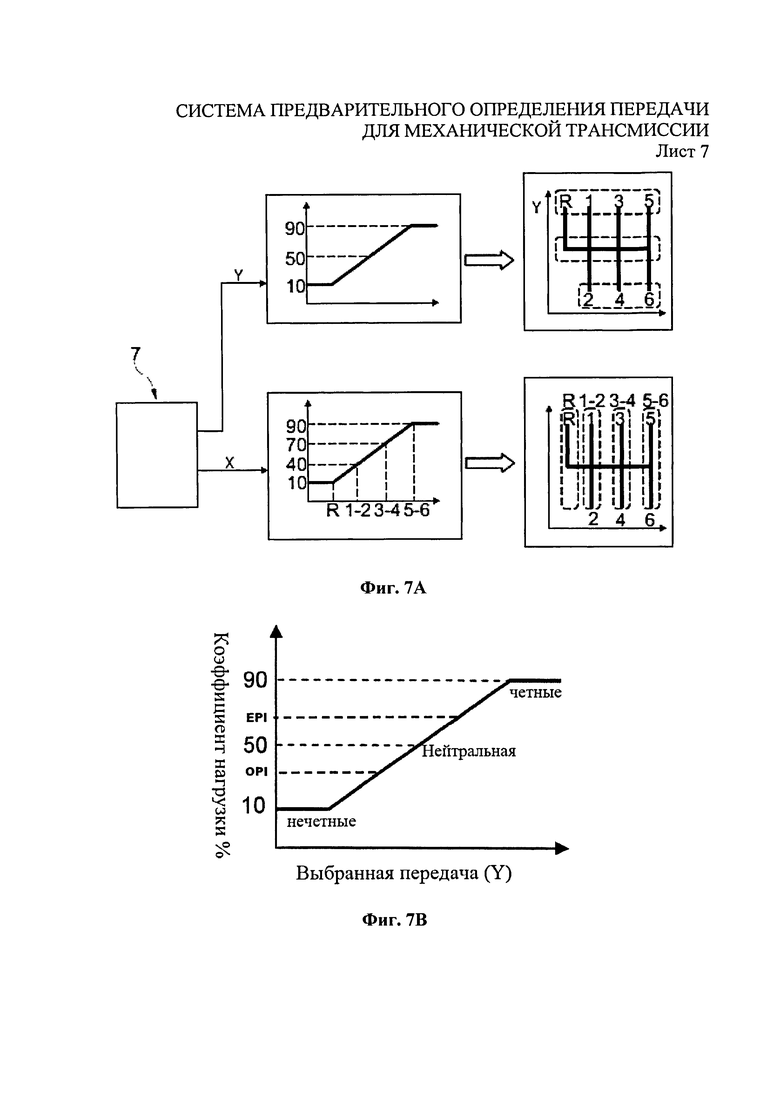
Фиг.7А представляет собой схему, показывающую зависимость между угловым и осевым положениями поворотного селекторного цилиндра трансмиссии и соответствующими выходными сигналами двухкоординатного датчика выбранной передачи;
На Фиг.7В показано увеличенное изображение зависимости между угловым положением поворотного селекторного цилиндра и выходным сигналом, изображающее две контрольные точки на плоскости или в угловом положении согласно одному варианту прогнозирующей системы определения передачи по изобретению;
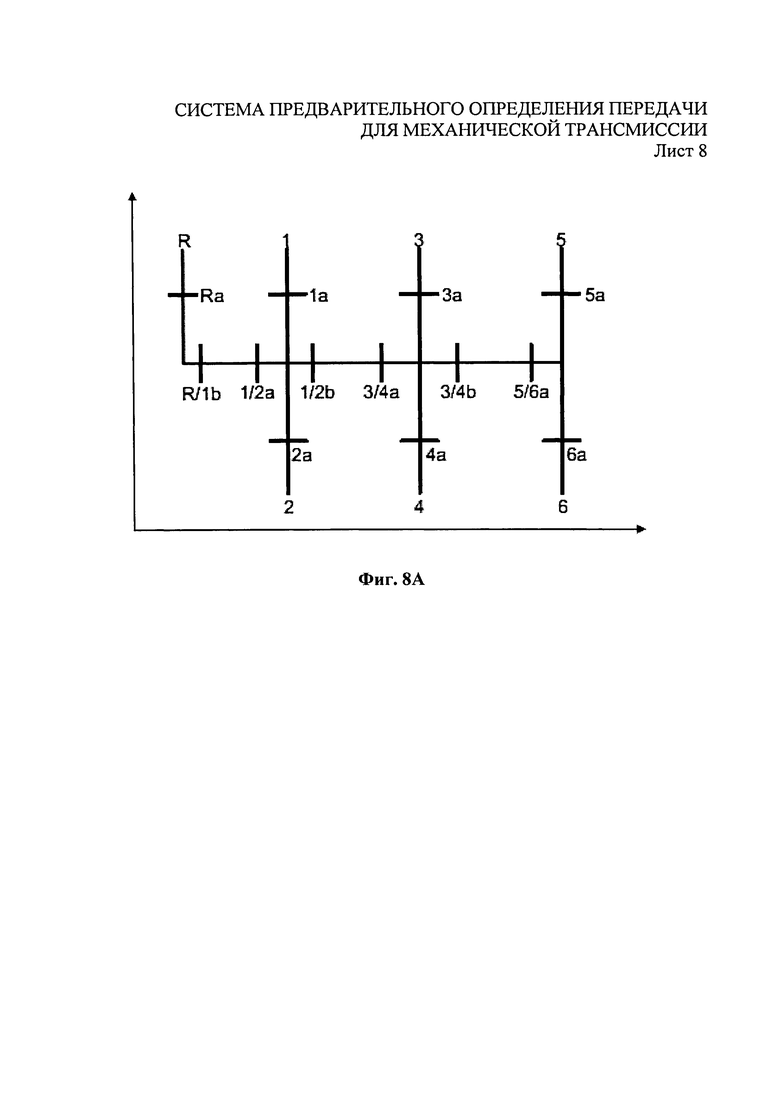
Фиг.8А представляет собой схематическое изображение кулисного селекторного механизма Н-типа, на котором показан ряд контрольных точек на плоскости и между плоскостями, в соответствии со вторым вариантом прогнозирующей системы определения передачи по изобретению;
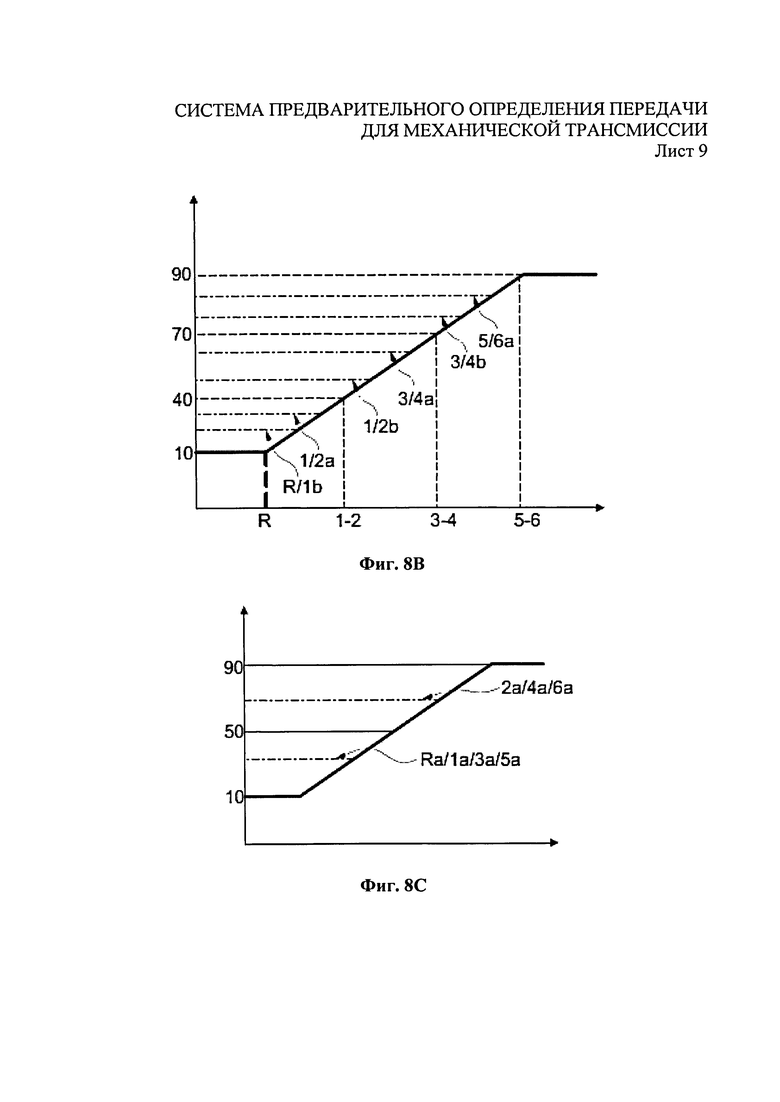
На Фиг.8В изображен график зависимости между осевым положением поворотного селекторного цилиндра и выходным сигналом, отображающий контрольные точки между плоскостями с Фиг.8А;
На Фиг.8С изображен график зависимости между угловым положением поворотного селекторного цилиндра и выходным сигналом, отображающий контрольные точки на плоскости с Фиг.8А;
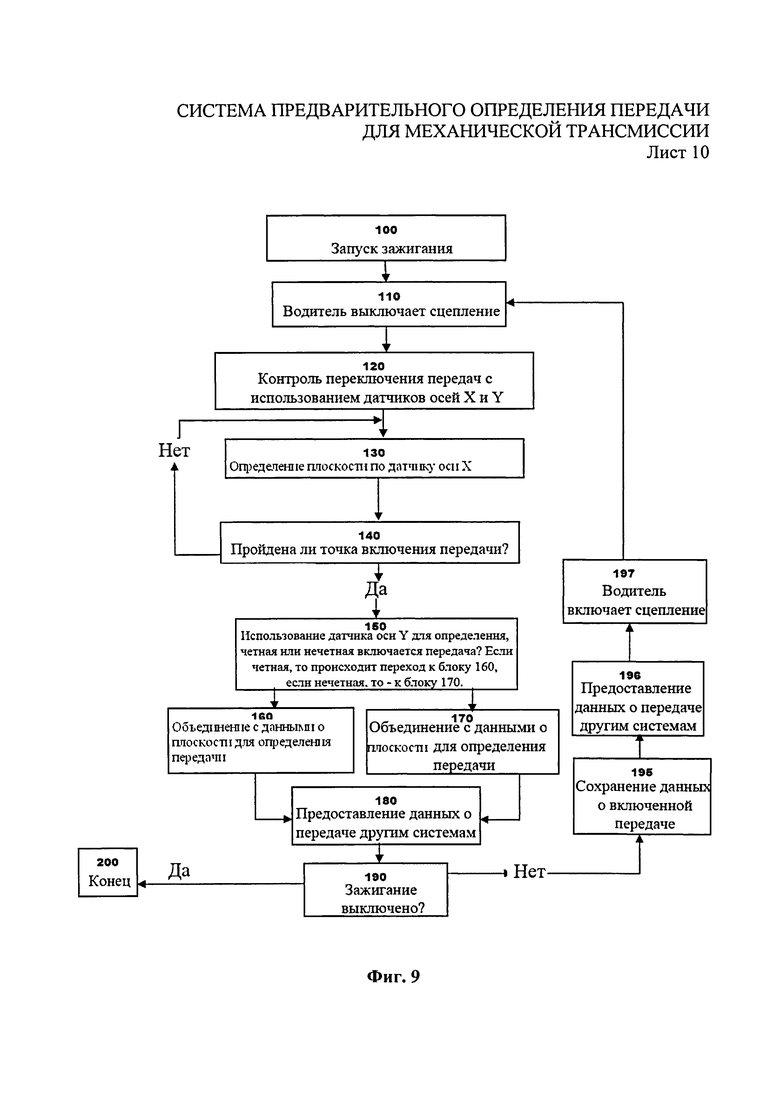
На Фиг.9 приведена упрощенная блок-схема первого варианта осуществления способа прогнозирования включения передачи;
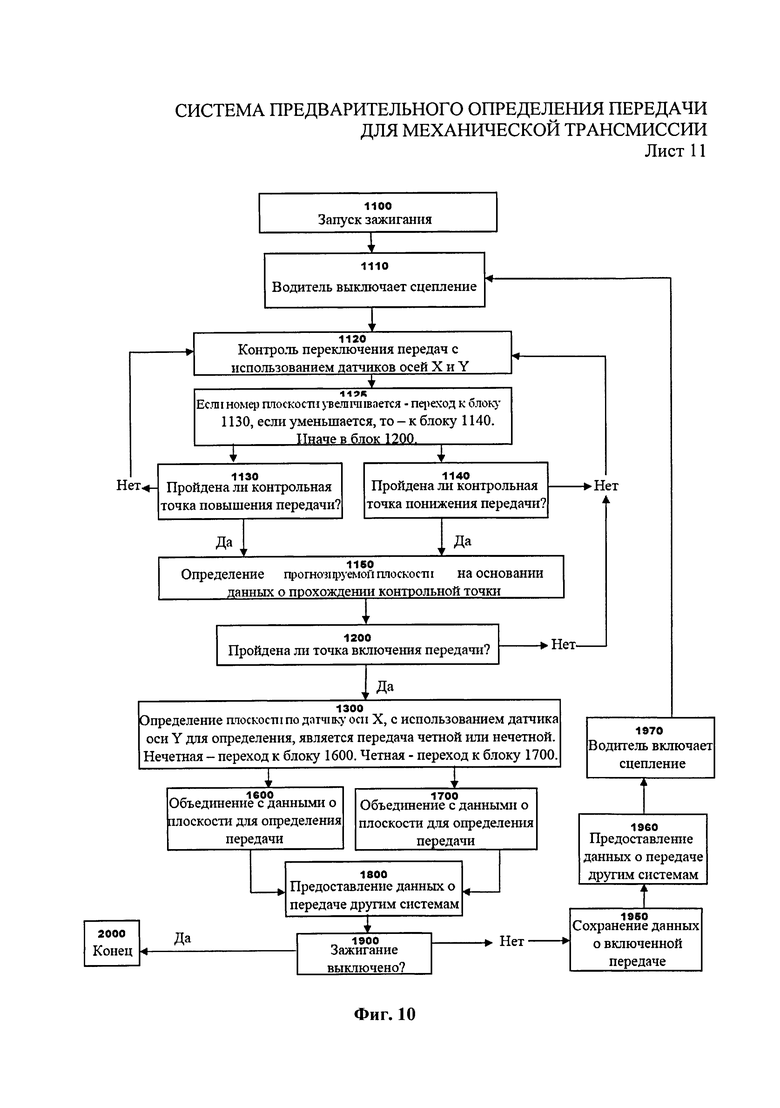
На Фиг.10 приведена упрощенная блок-схема второго варианта осуществления способа прогнозирования включения передачи.
Осуществление изобретения
На Фиг.1-6С изображено транспортное средство 1, имеющее двигатель 2, соединенный приводом с механическим редуктором/трансмиссией 3 посредством муфты сцепления 10. Трансмиссия 3 включает в себя рычаг 11 переключения передач, посредством которого водитель может выбирать различные передачи трансмиссии 3 с использованием селекторного механизма переключения передач Н-типа (H-gate selector machanism).
Электронный блок обработки данных в форме модуля 4 управления силовой передачей (РСМ) для управления силовой передачей моторного транспортного средства 1. Управляющий модуль 4 включает в себя блок 6 управления двигателем для управления работой двигателя 2 и модуль 5 состояния трансмиссии для определения рабочего режима трансмиссии 3.
Управляющий модуль (РСМ) 4 принимает ряд входных сигналов с датчиков 9, включая сигналы от датчиков частоты вращения двигателя, датчиков скорости транспортного средства, датчиков положения педали сцепления, датчиков положения педали газа, датчиков положения педали тормоза, а также информацию от других возможных компонентов моторного транспортного средства 1, таких как данные о состоянии заряда батареи (не показано) и рабочий режим блока воздушного кондиционирования (не показано).
Все или некоторые из входных сигналов от датчиков 9 могут быть использованы блоком 6 управления двигателем для управления работой двигателя 2, а именно частотой вращения двигателя 2. Следует принимать во внимание, что блок 6 управления двигателем и модуль 5 состояния коробки передач могут быть как отдельными элементами обработки данных, так и частями единого электронного процессора, как например модуль РСМ 4, как показано на чертежах.
Моторное транспортное средство 1 содержит первый вариант системы прогнозирования передачи, состоящей из модуля 5 состояния трансмиссии, двухкоординатной магнитной мишени 8 и двухкоординатного датчика 7 выбранной передачи, образующих в комбинации пару двухкоординатных датчиков переключения передачи. Модуль 5 состояния трансмиссии расположен так, чтобы принимать сигналы от датчика 7 выбранной передачи, прикрепленного к картеру 3В трансмиссии 3. Датчик 7 выбранной передачи является массивом двухкоординатных магнитных датчиков PWM, который передает сигналы, основанные на изменении магнитного потока между датчиком 7 выбранной передачи и двухкоординатной магнитной мишенью 8, связанной с устройством переключения передач в виде поворотного селекторного цилиндра 3А. Датчик 7 выбранной передачи совмещает датчик углового положения с датчиком смещения по оси в одном массиве двухкоординатных датчиков.
На Фиг.2А, 4 и 5 изображена типичная конфигурация трансмиссии Н-типа, состоящая из переключающего поворотного селекторного цилиндра 3А, расположенного внутри основного картера 3В трансмиссии.
Переключающий поворотный селекторный цилиндр 3А вращается при движении рычага 11 переключения передач вперед и назад для выбора четной или нечетной передачи соответственно, и движется в осевом направлении при движении рычага 11 влево и вправо для смены плоскости рычага переключения передач, в которой осуществляется выбор передачи. Передача заднего хода может иметь конфигурацию четной или нечетной передачи, в зависимости от конфигурации трансмиссии 3. Следует отметить, что переключающий поворотный селекторный цилиндр можно расположить таким образом, что движения вперед и назад приводят к осевому движению селекторного цилиндра, а движения влево и вправо приводят к вращению селекторного цилиндра, следовательно, выходные данные массива двухкоординатных датчиков можно будет интерпретировать соответствующим образом.
Рычаг 11 переключения передач соединен посредством тросового привода с парой рычагов 21А, 21В, сформированных в виде части поворотного узла 20 переключения, который приводит в движение переключающий поворотный селекторный цилиндр 3А. Другими словами, поворотный селекторный цилиндр 3А переключения передач физически передвигается рычагом 11 переключения передач, что представляет собой механическое взаимодействие между ними.
Двухкоординатная магнитная мишень 8 прикреплена к поворотному селекторному цилиндру 3А, и, в показанном примере, датчик 7 выбранной передачи расположен на внешней стороне картера 3В трансмиссии и детектирует осевые и вращательные перемещения магнитной мишени 8. Однако Следует отметить, что датчик 7 выбранной передачи можно установить внутри картера 3В трансмиссии.
На Фиг.2В показаны варианты перемещения магнитной мишени 8 при включении различных передач.
На Фиг.3А, 3В, 6А, 6В и 6С изображен ведомый механизм 3С, который прикреплен к селекторному цилиндру 3А и вращается вместе с ним. Ведомый механизм 3С имеет три фиксатора 3Е, центральный фиксатор соответствует положению нейтральной передачи, фиксатор для четной передачи расположен с одной стороны от нейтрального фиксатора, а для нечетной передачи - с другой стороны. Шарик 3D удерживается пружиной (схематически изображена стрелкой S на Фиг.6А, 6В и 6С) для стыковки с одним из фиксаторов 3Е. Шарик 3D в скользящем контакте опирается на корпус коробки передач 3В напрямую или посредством кронштейна. Следует отметить, что шарик 3D можно заменить на поддерживаемый пружиной штифт с полусферическим концом. Фиксаторы 3Е определяют первое, второе и третье угловые положения, соответствующие положению выбора для первого, второго рядов передач и нейтральной передачи трансмиссии 3. Выступы, расположенные между фиксаторами нейтрального положения и фиксаторами положения включенных передач определяют, будет ли трансмиссия 3 при освобождения рычага переключения передач 11 перемещаться в положение включенной передачи или нейтральное положение, что далее будет рассмотрено более подробно.
Начиная с трансмиссии 3, можно увидеть, что имеется физическая связь с магнитной мишенью 8 в виде механического соединения мишени 8 с селекторным цилиндром 3А, а также физическое соединение с датчиком 7 выбранной передачи в виде механического соединения датчика 7 с картером 3В трансмиссии.
Существует магнитная связь между датчиком 7 выбранной передачи и магнитной мишенью 8, таким образом, что изменение магнитного потока можно считывать с помощью датчика 7 для получения сигнала об угловом и осевом положении селекторного цилиндра 3А и, следовательно, о том, находится ли трансмиссия на четной передачи, нечетной передаче или в нейтральном положении, и какая из четных или нечетных передач включена.
Датчик 7 выбранной передачи постоянно генерирует выходные сигналы, указывающие на осевое и угловое положения селекторного цилиндра 3А, и эти сигналы используют для прогнозирования следующей включаемой передачи путем сравнения выходных сигналов различных контрольных точек. Каждая контрольная точка представляет собой калиброванное значение, соответствующее значению сигнала для определенного положения. Следовательно, когда один из сигналов от датчика выбранной передачи имеет величину, равную значению контрольной точки, положение селекторного цилиндра 3А становится известным как заранее определенное положение, как угловое, так и осевое.
Например, при проведении испытаний можно установить угловые положения цилиндра 3А при включенной передаче, и можно установить соответствующие контрольные точки на плоскости, которые могут быть использованы для определения, когда достигнуто положение включения передачи. Четные и нечетные положения при включенной передаче показаны на Фиг.6В и 6С соответственно.
На Фиг.6А цилиндр 3А изображен в нейтральном положении, а на Фиг.6В и 6С цилиндр 3А изображен в положениях включенной четной передачи (EPI) и включенной нечетной передачи (OPI). В данном случае точка включения четной передачи достигается, когда цилиндр 3А поворачивается на Ω градусов относительно нейтрального положения, а точка включения нечетной передачи достигается, когда цилиндра 3А поворачивается на -β градусов относительно нейтрального положения. Вращение по часовой стрелке цилиндра 3А представлено на Фиг.6А-6С в виде положительного угла, а вращение против часовой стрелки - в виде отрицательного угла.
Если известны угловые положения, при которых достигается включение передач (EPI и OPI), и датчик 7 выбранной передачи откалиброван так, что модуль 5 состояния трансмиссии способен определить по его сигналам (используя заранее установленные контрольные точки), что эти угловые положения достигнуты, то это можно использовать для прогнозирования, является ли будущая передача четной или нет, до того, как она будет на самом деле включена. При комбинировании данной информации с осевым положением цилиндра 3А, полученной на основании сигнала об осевом положении, который генерируется датчиком 7 выбранной передачи, модуль 5 состояния трансмиссии способен определить точное положение следующей передачи, которая будет включена.
Специалистам в данной области техники понятно, что соответствующие точки включения четных и нечетных передач являются угловыми положениями цилиндра 3А, где различные действующие силы будут вращать цилиндр 3А так, что шарик 3D будет полностью зафиксирован соответствующим фиксатором, после чего включится соответствующая передача. Другими словами, в точке включения передачи и после ее прохождения трансмиссия автоматически будет включена на передачу, а в положении перед этой точкой трансмиссия вернется в положение нейтральной передачи.
Согласно Фиг.7А и 7 В к модулю 5 состоянии трансмиссии поступают два входных сигнала: сигнал с данными об угловом положении (ось Y) и сигнал с данными об осевом перемещении (ось X). Точнее, датчик 7 выбранной передачи генерирует сигнал PWM на выходе, который находится в пределах диапазона (между 10% и 90%) или вне диапазона (>90% или<10%). Программный драйвер ввода информации в модуле 5 состояния трансмиссии обрабатывает PWM-сигнал, и, если он выходит за пределы (>90% или<10%) драйвер выдает данный сигнал за ошибку. Следует отметить, что диапазон от 10% до 90% указан в качестве примера и не является ограничивающим.
Если PWM-сигнал находится в пределах диапазона (между 10% и 90%), драйвер считает сигнал нормальным. Затем модуль 5 состояния трансмиссии сравнивает PWM-сигнал с пороговым значением, чтобы определить, выбрана или нет нейтраль, выбрана или нет четная передача, выбрана или нет нечетная передача, была ли достигнута точка включения OPI и была ли достигнута точка включения EPI.
На Фиг.7А видно, что шестиступенчатая трансмиссия имеет традиционное выполнение переключающего механизма Н-типа с нечетными передачами, расположенными в одном ряду с передачей заднего хода, и четными передачами, расположенными в другом ряду. Также видно, что передачи расположены в ряде плоскостей рычага управления переключением передач, на одной из которых расположена передача заднего хода, а на следующих плоскостях по две передачи переднего хода: первая и вторая передачи (плоскость 1/2), третья и четвертая передачи (плоскость 3/4) и пятая и шестая передачи (плоскость 5/6).
На Фиг.7В видно, что если PWM-сигнал в основном составляет 90%, модуль 5 состояния трансмиссии интерпретирует это как указание на то, что выбрана одна из четных передач. Если PWM-сигнал, в основном, составляет 10%, модуль 5 состояния трансмиссии интерпретирует это как указание на то, что выбрана одна из нечетных передач. Если же PWM-сигнал, в основном, составляет 50%, модуль 5 состояния трансмиссии интерпретирует это как указание на то, что выбрано нейтральное положение.
Следует отметить, что на практике могут иметь место интервалы допуска применительно ко всем указанным фигурам, например, модуль 5 состояния трансмиссии может нормально работать для следующих угловых направлений с осуществлением логических проверок:
Если 85%<PWM-сигнал<90%, то включена четная передача; (1)
Если 10%<PWM-сигнал<15%, то включена нечетная передача; (2)
Если 45%<PWM-сигнал<55%, то передача на нейтрали. (3)
В дополнение к этой оценке модуль 5 состояния трансмиссии также сравнивает сигнал углового положения датчика 7 выбранной передачи с двумя поворотными контрольными точками для точек включения четной передачи (EPI) и точек включения нечетной передачи (OPI), которые используются для прогнозирования следующей включаемой передачи.
Например, как изображено на Фиг.7В, модуль 5 состояния трансмиссии осуществляет следующие проверки для углового положения:
Если PWM-сигнал<30%, то прогнозная следующая передача является нечетной; (4)
Если PWM-сигнал<70%, то прогнозная следующая передача является четной. (5)
Где заранее заданные поворотные контрольные точки EPI и OPI это 70% и 30% соответственно.
Используя данную логику, модуль 5 состояния трансмиссии способен предсказать следующую передачу до ее непосредственного включения путем объединения результатов проверки с осевым положением цилиндра 3А, Данная информация может быть направлена на несколько миллисекунд раньше (20-40 мс) другим системам управления, нуждающимся в ней, например, индикатору передачи интерфейса водителя (HMI) или блоку 6 управления двигателем непосредственно перед включением передачи.
Следует отметить, что датчик 7 выбранной передачи также можно расположить так, чтобы когда трансмиссия 3 находится в нейтральном положении, соответствующая норма сигнала составляла бы 50%, когда рычаг переключения передач передвинут вперед на одну из нечетных передач, норма сигнала превышала бы 50%, а когда выбрана одна из четных передач, норма сигнала была бы ниже 50%. Таким образом, вышеописанные логические проверки будут иметь противоположные условия, например:
Если 85%<PWM-сигнал<90%, то включена нечетная передача; (1')
Если 10%<PWM-сигнал<15%, то включена четная передача (2')
Если 45%<PWM-сигнал<55%, то передача на нейтрали (3')
Если PWM-сигнал<30%, то прогнозная следующая передача является четной; (4')
Если PWM-сигнал<70%, то прогнозная следующая передача является нечетной. (5')
Возвращаясь к Фиг.7А, можно увидеть, что показан выходной сигнал с датчика 7 выбранной передачи для осевого направления (или по оси X), а также можно видеть, что для шестиступенчатой трансмиссии показано в качестве примера следующее:
Если PWM-сигнал=10%, то выбрана плоскость передачи заднего
хода;
Если PWM-сигнал=40%, то выбрана плоскость первой/второй передачи;
Если PWM-сигнал=70%, то выбрана плоскость третьей/четвертой передачи;
Если PWM-сигнал=90%, то выбрана плоскость пятой/шестой передачи.
Как ранее было сказано, для данных схем применимы отклонения в пределах допуска, чтобы предусмотреть износ или неточности конструкции, на практике модуль состояния трансмиссии может применять для осевого направления следующие логические проверки:
Если 10%<PWM-сигнал<15%, то выбрана плоскость передачи заднего хода; (6)
Если 37,5%<PWM-сигнал<42,5%, то выбрана плоскость первой/второй передачи; (7)
Если 67,5%<PWM-сигнал<72,5%, то выбрана плоскость третьей/четвертой передач; (8)
Если 85%<PWM-сигнал<90%, то выбрана плоскость пятой/шестой передач. (9)
Модуль 5 состояния трансмиссии может использовать логические проверки (4) и (5) вместе с одной из проверок (6)-(9) для прогнозирования следующей включаемой передачи (N2G), как показано ниже в таблице 1.
Модуль 5 состояния трансмиссии после этого может подтвердить, когда передача уже включена, после чего данные о включенной передаче (EG) принимаются с датчика 7 выбранной передачи с использованием описанных выше логических проверок (1) и (2) в комбинации с одной из проверок (6)-(9), как показано ниже в таблице 2.
Следует отметить, что в отличие от угловой калибровки осевая калибровка может соответствовать 10%=шестая передача и 90%=передача заднего хода. В таком случае логические проверки для плоскости будут отличаться от указанных выше.
Несмотря на то, что система прогнозирования включения передачи была описана по отношению к использованию магнитного PWM-датчика, в котором используется двухкоординатный магнит и генерируется выходной PWM-сигнал, изобретение не ограничивается такими датчиками, и равно применимо для использования с датчиком перемещения, который вместо PWM-сигнала генерирует выходной сигнал переменного напряжения.
Также следует отметить, что система прогнозирования включения передачи не ограничивается использованием одного массива двухкоординатных магнитных датчиков 7 в качестве датчика выбранной передачи. Можно использовать трехмерный датчик и магнитную схему или два отдельных датчика: один для углового движения, другой - для осевого.
Также следует иметь в виду, что изобретение не ограничивается шестиступенчатой коробкой передач или расположением передачи заднего хода, показанным на Фиг.7А, а также что изобретение может быть применимо для трансмиссии с различным числом передач переднего хода или для различного расположения передачи заднего хода с тем же самым положительным эффектом.
На Фиг.8А-8С показана часть второго варианта системы прогнозирования включения передачи, которая по большей части идентична описанной ранее и не будет снова подробно рассматриваться.
Основное различие между вторым и первым вариантами, описанными выше, заключается в том, что в дополнение к контрольным точкам плоскостей включения передач, относящимся к расположенным на плоскости точкам включения, также предоставляется множество контрольных точек промежуточных плоскостей, расположенных между плоскостями переключения передач.
На Фиг.8А изображен ряд контрольных точек Ra, 1a, 2а, 3а, 4а, 5а и 6а, расположенных в плоскостях переключения. Контрольные точки 1а, 3а и 5а соответствуют точкам включения нечетных передач (OPI), а контрольные точки 2а, 4а, и 6а соответствуют точкам включения четных передач (EPI). Система прогнозирования включения передачи работает, как описано выше применительно к данным контрольным точкам, и, как описано выше, она также способна прогнозировать следующую включаемую передачу.
В дополнение к этим контрольным точкам Ra, 1a, 2а, 3а, 4а, 5а и 6а также имеется ряд контрольных точек R/1b, 1/2b, 3/4b и 1/2а, 3/4а, 5/6а промежуточных плоскостей. Контрольные точки R/1b, 1/2b и 3/4b промежуточных плоскостей являются контрольными точками повышения передачи, а контрольные точки 1/2а, 3/4а и 5/6а промежуточных плоскостей являются контрольными точками понижения передачи.
Функцией контрольных точек промежуточных плоскостей является предварительное определение того, повышается передача или понижается. Данная информация полезна, если прогнозирования включения передачи используется, например, для предоставления информации системе согласования переключения передач, где регулировка частоты вращения двигателя должна быть осуществлена за очень короткий период времени во время переключения передачи между моментом выключения муфты сцепления 10 и моментом ее следующего включения.
Таким образом, контрольные точки промежуточных плоскостей используются модулем 5 состояния трансмиссии для определения, является ли текущее переключение передачи повышающим или понижающим, т.е., будет ли следующая передача более высокой передачей по отношению к текущей, или более низкой.
На Фиг.8В изображены контрольные точки R/1b, 1/2b, 3/4b, 1/2а, 3/4а и 5/6а промежуточных плоскостей в виде выходных PWM-сигналов выраженных в процентах от выходного сигнала датчика осевого перемещения и датчика 7 выбранной передачи. Фиг.8С дублирует Фиг.7 В с изображением контрольных точек на Фиг.8С (Ra, 1a, 3а, 5а, 2а, 4а и 6а), соответствующих контрольным точкам OPI и EPI на Фиг.7В.
В каждом случае предыдущая передача, т.е. передача, которая была включена до определения нового переключения, используется для обеспечения ранней индикации следующей включаемой передачи.
Так как контрольные точки промежуточных плоскостей являются заданными точками, они не подвержены влиянию отклонений допуска в механизме, т.е. всегда можно использовать единственные значения.
Например, контрольные точки, изображенные на Фиг.8А и 8В имеют следующие значения % PWM-сигнала:
R/1b=17,5%
1/2а=32,5%
1/2b=45%
3/4а=65%
3/3b=75%
5/6а=85%
Эти данные используются для заблаговременного определения в цикле смены передач того, понижается или повышается передача, основываясь на данных % PWM-сигнала включенной передачи.
Например, если включена четвертая передача, то можно использовать следующую проверку:
Если % PWM-сигнал<65%, предположительно передача будет понижаться;
Если % PWM-сигнал>75%, предположительно передача будет повышаться.
Аналогичным образом, если включена вторая передача, то можно использовать следующую проверку:
Если % PWM-сигнал<32,5%, предположительно, передача будет понижаться;
Если % PWM-сигнал>45%, предположительно передача будет повышаться.
Необходимо отметить, что, имея отдельные контрольные точки, между различными плоскостями переключения передач, осуществляется заблаговременное информирование, когда одна из контрольных точек пройдена, и этот гистерезис можно использовать для предотвращения резких изменений.
Например, если имеется лишь одна контрольная точка, скажем 55%, то уведомление о понижении передачи от плоскости 3/4 к плоскости 1/2 или при повышении от плоскости 1/2 к плоскости 3/4 будет поступать с задержкой. 65% по сравнению с 55% и 45% по сравнению с 55% соответственно.
Следует отметить, что это справедливо при использовании двойных контрольных точек, используемых между всеми смежными плоскостями переключения передач.
Таблица 3 ниже демонстрирует, как пересечение контрольных точек используется модулем 5 состояния трансмиссии для выполнения заблаговременной индикации того, будет ли с большой вероятностью следующая передача выше или ниже, чем ранее выбранная. Для каждой контрольной точки промежуточной плоскости показан возможный вариант следующей передачи.
Эти выходные данные изменены на основании ожидаемых результатов, которые являются обычной схемой переключения передач, ожидаемой от водителя. Это может быть заранее установлено или подвержено обучению, например, если водитель постоянно переключает с четвертой передачи на третью, то если активируется контрольная точка 5/6а, это можно использовать как свидетельство того, что следующей передачей будет третья.
В таблице 4 приведены результаты из таблицы 3, откорректированные на основании логической схемы переключения передач.
Таким образом, система предварительного определения передачи согласно второму варианту осуществления изобретения способна предоставить дополнительное время для любых других операций, таких как согласование переключения передач (GSH), путем заблаговременной индикации требуемого действия.
Например, предполагая, что в данный момент включена третья передача, и осуществлено понижение до второй передачи, с помощью системы по первому варианту осуществления изобретения нельзя предсказать, будет ли следующая выбранная передача выше или ниже, чем третья, пока одна из контрольных точек 1а, 2а, 4а, 5а, 6а не будет пройдена, но, в соответствии с данным вариантом осуществления изобретения, как только пройдена контрольная точка 3/4А, сразу становится понятно, что происходит понижение передачи, и, таким образом, данная информация может быть предоставлена любой системе, где она необходима. Затем, после прохождения контрольной точки 2а, полученную информацию можно использовать для дальнейшего прогнозирования следующей передачи, что полностью подтверждается после фактического включения передачи.
Следует отметить, что время, требуемое водителю для перемещения рычага 11 переключения передач с третьей передачи на вторую относительно мало, значит, любая дополнительная информация о включаемой передаче, полученная как можно раньше в процессе переключения передач, является весьма полезной для систем, которым необходимы данные о выбранной передаче.
Например, когда система согласования переключения передач (GSH) заблаговременно имеет данные о повышении включаемой передачи, это позволяет ей начать снижение частоты вращения двигателя, либо увеличение частоты вращения двигателя в случае понижения передачи, и наоборот, заблаговременная информация о том, что изменение передачи представляет собой понижение передачи, позволяет системе GSH начать увеличение частоты вращения двигателя.
На Фиг.9 показаны основные этапы, необходимые для выполнения первого варианта осуществления способа прогнозирования включаемой передачи для многоступенчатой механической трансмиссии вышеописанного типа.
Способ начинается с этапа 100 с запуска зажигания и затем на этапе ПО водитель выключает муфту сцепления (нажатием на педаль сцепления), готовясь к переключению передачи или к выбору передачи.
Далее способ переходит к этапу 120, в котором датчик 7 выбранной передачи используется для контроля движения элемента переключения передач, такого как цилиндр 3А, на этапе 130 определяется плоскость рычага переключения передачи. Другими словами, на этапе 130 определяется, в какой плоскости находится на данный момент рычаг переключения передач.
Далее на этапе 140 определяется, достигнута ли одна из контрольных точек включения передачи или точек на плоскости EPI или OPI. Если одна из контрольных точек EPI или OPI была достигнута, способ переходит на этап 150, в противном случае, действие возвращается к этапу 130 и продолжает циклически выполняться на этапах 130, 140 до тех пор, пока не будет достигнута одна из контрольных точек EPI или OPI.
На этапе 150 определяется, какая из контрольных точек в плоскости была достигнута, и на основании этого решения способ переходит либо к этапу 160, если была достигнута контрольная точка в плоскости нечетной передачи (OPI), либо к этапу 170, если была достигнута контрольная точка четной передачи (EPI).
На этапах 160 и 170 информация о плоскости из этапа 130 объединяется с информацией о том, четная или нечетная будет выбрана передача, для предоставления прогнозных данных о следующей передаче, которая должна быть выбрана, а на этапе 180 данная информация предоставляется любой нуждающейся в ней системе.
Далее способ переходит к этапу 190, на котором определяется, произошло ли выключение двигателя, и если да, то способ завершается на этапе 200, а в противном случае способ переходит к этапу 195, в котором данные о включенной передаче сохраняются для будущего использования. Затем информация предоставляется этапу 196 для систем, которым требуются данные о текущем положении передачи, в качестве подтверждения предварительных данных этапа 180.
Далее способ переходит к этапу 197, на котором водитель снова задействует муфту сцепления 10 и затем на этапе 197 происходит пауза до следующего разъединения муфты сцепления 10, и с этого момента способ возвращается на этап 110, чтобы начаться заново.
На Фиг.10 показаны основные шаги, требуемые для осуществления второго варианта способа прогнозирования включаемой передачи для многоступенчатой механической трансмиссии вышеописанного типа.
Способ начинается с этапа 1100 с запуска зажигания и затем на этапе 1110 водитель разъединяет муфту сцепления (нажатием на педаль сцепления), готовясь к переключению или выбору передачи, при этом считываются сохраненные значения зафиксированных данных об осевом и угловом положениях или о выбранной в данный момент передаче.
Далее способ переходит к этапу 1120, на котором датчик 7 выбранной передачи используется для контроля движения элемента переключения передач, такого как цилиндр 3А, и на этапе 1125 определяется, движется ли рычаг в той же плоскости (% PWM-сигнала является постоянным), движется вверх на повышение передачи (% PWM-сигнала увеличивается) или вниз на понижение (% PWM-сигнала уменьшается). На основании этих данных способ переходит к этапу 1200, если плоскость не изменилась, к этапу 1130, если передача повышается, и к этапу 1140, если передача понижается.
На этапе 1130 происходит проверка, была ли пройдена контрольная точка повышения передачи промежуточной плоскости, и если да, то действие переходит к этапу 1150. В противном случае, способ возвращается к этапу 1120. Аналогично, на этапе 1140 происходит проверка, была ли пройдена контрольная точка понижения передачи промежуточной плоскости, и если да, то действие переходит к этапу 1150. В противном случае, способ возвращается к этапу 1120.
Этапы 1130 и 1140 позволяют использовать различные контрольные точки повышения и понижения передач промежуточных плоскостей. Но следует отметить, что если одинаковые контрольные точки используются независимо от направления переключения, действие может перейти из этапа 1120 на этап, проверяющий, были ли пройдены контрольные точки промежуточных плоскостей, и если да, то действие переходит на этап 1150. В противном случае, действие возвращается на этап 1120.
На этапе 1150 данные о промежуточной плоскости будущей передачи положения рычага переключения передач на основании пройденной контрольной точки предоставляются любым системам, нуждающимся в информации, будет ли следующая передача, скорее всего, ниже или выше, чем включенная до этого передача. Это может представлять собой многоуровневый этап, при котором информация обновляется по мере прохождения различных контрольных точек промежуточных плоскостей, перед прохождением на этапе 1200 точки включения передачи. Другими словами, если проверка на этапе 1200 заканчивается отрицательно, действие переходит к этапу 1150, а не к этапу 1120, как показано.
Продолжая с этапа 1200, в котором определяется, была ли достигнута точка включения передачи, то есть контрольная точка на плоскости. Контрольные точки на плоскости, EPI и OPI, используются, как и раньше, для определения того, будет ли следующая передача четной или нечетной. Если точка включения передачи не была достигнута, способ переходит обратно к этапу 1120, а если точка включения передачи была достигнута, способ переходит к этапу 1300, на котором определяется плоскость рычага переключения передач, а также то, относится ли достигнутая точка включения к четной передаче или к нечетной.
Далее на этапах 1600 и 1700 данные о плоскости, в которой находится рычаг 11, из этапа 1300 объединяются с данными о направлении переключения для осуществления прогнозирования следующей выбранной передачи.
Затем на этапе 1800 эти данные предоставляются любым системам, которым это необходимо.
Далее способ переходит к этапу 1900, на котором определяется, был ли выключен двигатель, и если да, то способ завершается на этапе 2000, а в противном случае, действие переходит к этапу 1950, на котором данные о включенной передаче сохраняются для будущего использования. Затем информация предоставляется этапу 1960 для систем, требующих данные о текущем положении передачи в качестве подтверждения предварительных данных этапа 1800.
Далее действие переходит к этапу 1970, на котором водитель повторно задействует муфту сцепления 10, и затем на этапе 1970 происходит пауза до следующего разъединения муфты сцепления 10, и с этого момента способ начинается снова с этапа 1110.
Следует отметить, что два вышеизложенных варианта осуществления способа прогнозирования следующей включаемой передачи представлены в качестве примера и изобретение не ограничивается конкретными действиями или порядком их осуществления.
Специалистам в данной области техники будет понятно, что, несмотря на то, что изобретение было описано посредством примера со ссылкой на один или более предпочтительные варианты осуществления, оно не ограничивается ими, и возможно осуществление одного или более изменений изложенных вариантов осуществления изобретения без отступления от сущности изобретения, представленной в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ ДАТЧИКА ВЫБРАННОЙ ПЕРЕДАЧИ И СИСТЕМА ДАТЧИКОВ ВЫБРАННОЙ ПЕРЕДАЧИ | 2012 |
|
RU2588699C9 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2602164C2 |
| СПОСОБ И СИСТЕМА УЛУЧШЕНИЯ КАЧЕСТВА ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2012 |
|
RU2629624C2 |
| СИНХРОНИЗИРОВАННАЯ АВТОМАТИЧЕСКАЯ ТРАНСМИССИЯ | 2008 |
|
RU2362074C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2008 |
|
RU2376175C1 |
| Двойное автомобильное сцепление | 2020 |
|
RU2753044C1 |
| ПРЕСЕЛЕКТИВНАЯ КОРОБКА ПЕРЕДАЧ | 2014 |
|
RU2552787C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ВКЛЮЧЕНИЕМ СЦЕПЛЕНИЯ | 2012 |
|
RU2599860C2 |
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧИ ПРИ ОПРЕДЕЛЕНИИ ВЛАЖНОСТИ ОКРУЖАЮЩЕЙ СРЕДЫ (ВАРИАНТЫ) | 2016 |
|
RU2705351C2 |
| АВТОМАТИЗИРОВАННАЯ КОРОБКА ПЕРЕДАЧ | 2010 |
|
RU2437011C1 |

Представлена система прогнозирования передачи, в которой осевое и угловое положения селекторного элемента (3А) переключения передач считываются осевыми и угловыми датчиками, выполненными в виде массива двумерных магнитных датчиков (7) выбранной передачи. Сигналы, указывающие на угловое и осевое положения селекторного элемента (3А) переключения передач, предоставляются электронному блоку обработки данных от массива двумерных датчиков (7), а электронный блок обработки данных на основании сигналов, полученных от массива двумерных датчиков (7), предоставляет выходной сигнал с данными о следующей включаемой передаче. Предложен также способ прогнозирования передачи и моторное транспортное средство. Достигается прогнозирование передачи. 3 н. и 13 з.п. ф-лы, 4 табл., 10 ил.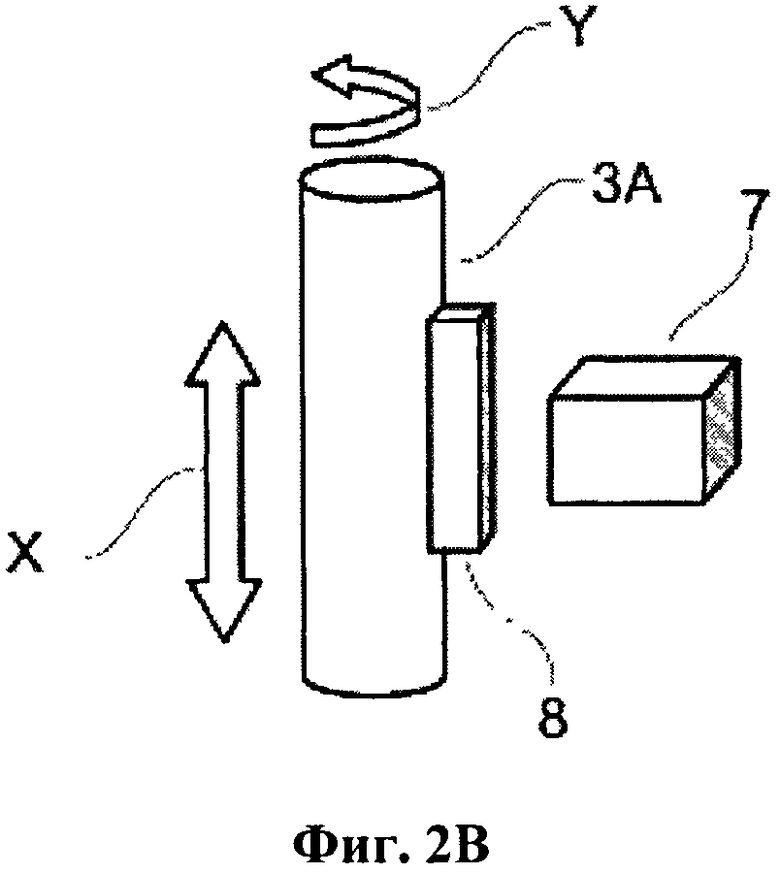
1. Система прогнозирования передачи многоступенчатой механической трансмиссии с механизмом переключения передач Н-типа, включающим в себя селекторный элемент переключения передач, который приводится в движение рычагом переключения передач в угловом и осевом направлениях, причем система содержит первый датчик для считывания углового положения селекторного элемента переключения передач и второй датчик для считывания осевого положения селекторного элемента переключения передач, а также электронный блок обработки данных для получения и обработки сигналов, поступающих от первого и второго датчиков, причем электронный блок обработки данных выполнен с возможностью осуществления прогнозирования, какая передача будет включена следующей, на основании сигналов, полученных от первого и второго датчиков.
2. Система по п.1, в которой блок обработки данных выполнен с возможностью осуществления прогнозирования, какая передача будет включена следующей, на основании данных о том, что достигнута и пройдена по меньшей мере одна из заранее определенных контрольных точек.
3. Система по п.1, в которой селекторный элемент переключения передач имеет прикрепленную к нему двухкоординатную магнитную мишень, а первый и второй датчики сформированы в виде единого массива двухкоординатных датчиков.
4. Система по п.1, в которой механизм переключения передач Н-типа характеризуется совокупностью плоскостей перемещения рычага переключения передач, а сигнал от второго датчика используется электронным блоком обработки данных для определения того, в какой из плоскостей находится рычаг переключения передач.
5. Система по п.4, в которой селекторный элемент переключения передач выполнен с возможностью поворота между первой, второй и третьей угловыми позициями, соответствующими положениям переключения для первого и второго рядов передач и нейтрального положения, причем между первым и третьим угловыми положениями установлена первая контрольная точка в угловом положении, после которого действующие силы переводят селекторный элемент переключения передач в первое угловое положение, и, когда сигнал от первого датчика указывает, что угловое положение селекторного элемента переключения передач соответствует первой контрольной точке, электронный блок обработки данных использует это как указание на то, что включаемая передача относится к первому ряду передач.
6. Система по п.4, в которой селекторный элемент переключения передач выполнен с возможностью поворота между первым, вторым и третьим угловыми положениями, соответствующими положениям переключения для первого и второго рядов передач и нейтрального положения, причем между вторым и третьим угловыми положениями установлена вторая контрольная точка, при прохождении через которую действующие силы переводят селекторный элемент переключения передач во второе угловое положение, и, когда сигнал с первого датчика указывает, что угловое положение селекторного элемента переключения передач соответствует второй контрольной точке, электронный блок обработки данных использует это как указание на то, что включаемая передача относится ко второму ряду передач.
7. Система по п.5, в которой электронный блок управления выполнен с возможностью объединять прогнозирование ряда передачи, осуществленное на основании сигнала от первого датчика, с информацией о плоскости рычага переключения передач, полученной на основании сигнала от второго датчика для осуществления прогнозирования, какая передача будет включена следующей.
8. Система по п.6, в которой электронный блок обработки данных выполнен с возможностью определять, усиливается или ослабевает сигнал от второго датчика, и использовать это как предварительный прогноз, будет ли следующая включенная передача более высокой, чем выбранная ранее или более низкой.
9. Система по п.5, в которой между смежными плоскостями рычага переключения передач предусмотрена по меньшей мере одна контрольная точка промежуточной плоскости, а электронный блок обработки данных выполнен с возможностью получения данных о том, будет ли следующая включенная передача более высокой, чем выбранная ранее, или более низкой, основываясь на том, какая из контрольных точек промежуточных плоскостей пройдена.
10. Система по п.9, в которой между плоскостями рычага переключения передач предусмотрены контрольные точки промежуточной плоскости повышения и понижения передачи.
11. Система по любому из пп.4-9, в которой первый ряд передач содержит все нечетные передние передачи, а второй ряд передач содержит все четные передние передачи.
12. Моторное транспортное средство, содержащее систему прогнозирования передачи согласно любому из пп.1-11.
13. Способ прогнозирования передачи, которая будет включена в многоступенчатой механической трансмиссии с механизмом переключения передач Н-типа, в котором выбираемые передачи расположены двумя рядами и в совокупности параллельных плоскостей рычага переключения передач, а механизм переключения передач включает в себя селекторный элемент переключения передач, приводимый в движение рычагом переключения передач в угловом и осевом направлениях для осуществления включения выбираемых передач, в котором определяют угловое и осевое положения селекторного элемента переключения передач и, на основании определенных осевого и углового положений, осуществляют прогнозирование следующей включаемой передачи.
14. Способ по п.13, в котором дополнительно определяют осевое положение селекторного элемента переключения передач, устанавливают заранее определенные угловые точки, сравнивают угловое положение селекторного элемента переключения передач с заранее определенными угловыми точками, и, если угловое положение переключателя передач достигает одной из заранее определенных угловых точек, используют это в совокупности с известным осевым положением селекторного элемента переключения передач как указание на то, что передача, соответствующая достигнутой точке и осевому положению, предположительно является следующей включаемой передачей.
15. Способ по п.14, в котором дополнительно определяют осевое направление, в котором перемещается селекторный элемент переключения передач, и используют направления его движения в качестве предварительных данных о том, будет ли следующая включенная передача более высокой или более низкой, чем ранее включенная передача.
16. Способ по п.15, в котором дополнительно устанавливают по меньшей мере одну контрольную точку промежуточной плоскости между соседними плоскостями рычага переключения передач, определяют, была ли пройдена какая-либо из этих контрольных точек промежуточной плоскости, и используют эту информацию в качестве предварительных данных о том, будет ли следующая включенная передача более высокой или более низкой, чем ранее включенная передача.
| US2011040461A1, 17.02.2011 | |||
| DE4422554C1, 05.10.1995 | |||
| JP2004251435A, 09.09.2004. |

