Область техники, к которой относится изобретение
Данное изобретение относится к управлению транспортным средством, имеющим двигатель, который приводит в действие трансмиссию через сцепление, в частности, к управлению транспортным средством во время выхода из фазы свободного качения.
Уровень техники
Известно, что транспортные средства с двигателем, управляющим коробкой передач через сцепление, используют фазу свободного качения для экономии топлива. Во время фазы свободного качения двигатель временно останавливается и отключается от приводимых в движение колес, при этом транспортное средство продолжает движение. Разъединение карданной передачи исключает трение двигателя и насосные потери, возникающие из-за действия сил, замедляющих транспортное средство, таким образом, позволяя ему двигаться далее по инерции.
Существует два способа перехода в фазу свободного качения из фазы обычного вождения. Во-первых, водитель может переключиться на нейтральную передачу, а во-вторых, водитель может отключить сцепление, когда приводная передача еще включена.
Трудность, связанная с использованием фазы свободного качения, состоит в том, что во время выхода из фазы свободного качения необходимо перезапустить двигатель и выполнить повторное подключение карданной передачи.
Если свободное качение осуществляется с выбранной нейтральной передачей (FRIN), то для выхода из данной фазы водитель нажимает педаль сцепления, включает нужную передачу, а затем отпускает педаль сцепления для зацепления муфты сцепления.
Если свободное качение осуществляется когда трансмиссия находится на передаче, но с разомкнутым электронным сцеплением (FRIG), то для выхода из данной фазы водитель либо нажимает педаль газа для передачи крутящего момента от двигателя, либо нажимает педаль сцепления, включает новую передачу а затем отпускает педаль сцепления.
Во всех этих случаях часто появляются несоответствия между скоростью вращения двигателя и передаваемой на коробку передач мощностью когда сцепление включено во время выхода из фазы свободного качения. Любое такое несоответствие скорости приводит к колебаниям крутящего момента, что вызывает нежелательные толчки и, как результат, делает процесс вождения неудобным. Кроме того, значительные несоответствия скорости ведут к преждевременному износу муфты сцепления и деталей карданной передачи.
Раскрытие изобретения
Данное изобретение предусматривает способ и систему управления транспортным средством во время выхода из фазы свободного качения, что облегчает плавный выход машины из данной фазы.
Первый аспект изобретения предусматривает способ управления транспортным средством, имеющим двигатель, который через муфту сцепления приводит в действие трансмиссию во время выхода из фазы свободного качения. Данный способ включает в себя определение, выполнены ли одно или более условий для выхода из фазы свободного качения, и, если одно или более условий выполнены, осуществляют запуск двигателя и устанавливают скорость двигателя на необходимое значение частоты вращения, основанное на скорости на входе трансмиссии.
Способ может дополнительно включать в себя определение скорости на входе трансмиссии и регулирование частоты вращения двигателя для обеспечения ее соответствия входной скорости трансмиссии.
Определение входной скорости трансмиссии может включать в себя ее измерение.
Определение входной скорости трансмиссии может включать в себя вычисление входной скорости на основании текущей скорости моторного транспортного средства.
Вычисление входной скорости трансмиссии может включать в себя использование передаточного числа трансмиссии, выбранного для выхода из фазы свободного качения, в сочетании с текущей скоростью транспортного средства и суммарным передаточным числом конечной передачи.
Способ может также включать в себя использование системы определения выбранной передачи для определения передаточного числа, выбранного для выхода из фазы свободного качения, и использование данного передаточного числа для вычисления скорости на входе трансмиссии.
Способ может также включать в себя использование системы предварительного определения передачи для прогнозирования передачи, которая будет включена следующей, и использование передаточного числа прогнозируемой передачи, которая будет включена следующей, для вычисления входной скорости трансмиссии.
Способ может также включать в себя использование системы предварительного определения передачи для определения фактического передаточного числа, выбранного для выхода из фазы свободного качения, и использование фактического передаточного числа для вычисления входной скорости трансмиссии.
Во время фазы свободного качения муфта сцепления может быть включена, и трансмиссия может быть на нейтрали, и одно или более условий для выхода из фазы свободного качения может представлять собой включение передней передачи трансмиссии.
Во время фазы свободного качения муфта сцепления может быть выключена, трансмиссия может быть на передаче, а одно или более условий для выхода из фазы свободного качения может представлять собой запрос подачи крутящего момента от двигателя.
В соответствии со вторым аспектом изобретения предусмотрена система управления моторным транспортным средством, имющим двигатель, который через муфту сцепления приводит в действие трансмиссию во время выхода из фазы свободного качения, где данная система содержит контроллер для определения выполнения одного или более условий для выхода из фазы свободного качения. Если одно из условий выполнено, двигатель запускают, его частоту вращения устанавливают на необходимое значение, основанное на входной скорости трансмиссии.
Система может дополнительно содержать датчик для измерения входной скорости трансмиссии и необходимой частоты вращения двигателя (скорости вращения двигателя, совпадающей со входной скоростью трансмиссии).
Для выхода из фазы свободного качения контроллер способен использовать передаточное число выбранной передачи в сочетании с текущей скоростью транспортного средства и суммарным передаточным числом конечной передачи для вычисления входной скорости трансмиссии. Требуемая частота вращения может быть равна скорости вращения двигателя, соответствующей вычисленной скорости на входе трансмиссии.
Трансмиссия может быть механической, и система может дополнительно содержать систему определения выбранной передачи для определения передаточного числа, выбранного для выхода из фазы свободного качения.
Трансмиссия может быть механической, и система может дополнительно содержать прогнозирующую систему определения передачи для прогнозирования передачи, которая будет включена следующей, при этом контроллер может быть выполнен с возможностью использовать передаточное число прогнозируемой следующей передачи для вычисления входной скорости трансмиссии.
В этом случае прогнозирующая система определения передачи может быть использована для определения фактического передаточного числа, выбранного для выхода из фазы свободного качения, данное число может быть использовано контроллером для расчета входной скорости трансмиссии.
Во время фазы свободного качения трансмиссия может находиться в нейтральной позиции, выявление выполнения одного из условий для выхода из данной фазы состоит в определении включения передней передачи трансмиссии.
Во время фазы свободного качения муфта сцепления может быть выключена, трансмиссия может быть на передаче, а определение, выполнены ли одно или более условий для выхода из данной фазы может представлять собой определение наличия запроса о подаче крутящего момента от двигателя.
Согласно третьему аспекту изобретения представлено моторное транспортное средство, оснащенное системой управления транспортным средством с двигателем, который через муфту сцепления приводит в действие трансмиссию во время выхода из фазы свободного качения, выполненной в соответствии с вышеописанным вторым аспектом изобретения.
Краткое описание чертежей
Далее изобретение будет описано с помощью примеров со ссылкой на сопроводительные чертежи, на которых:
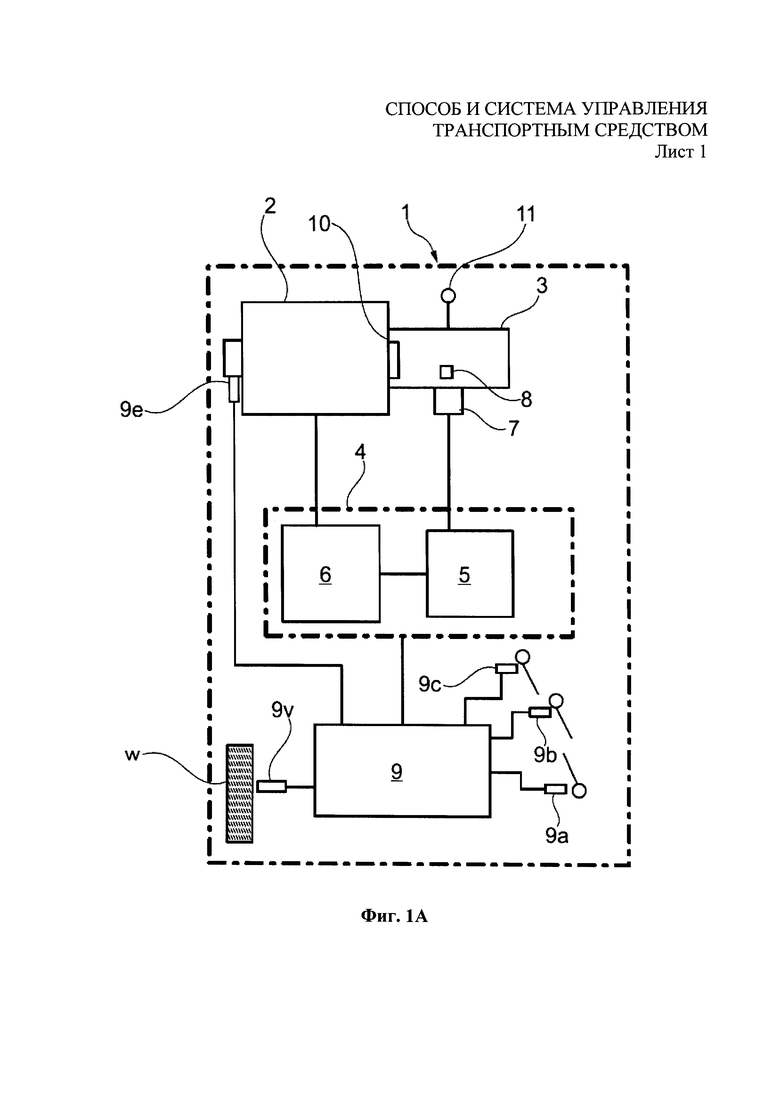
Фиг.1А представляет собой схематическое изображение транспортного средства согласно одному из аспектов изобретения;
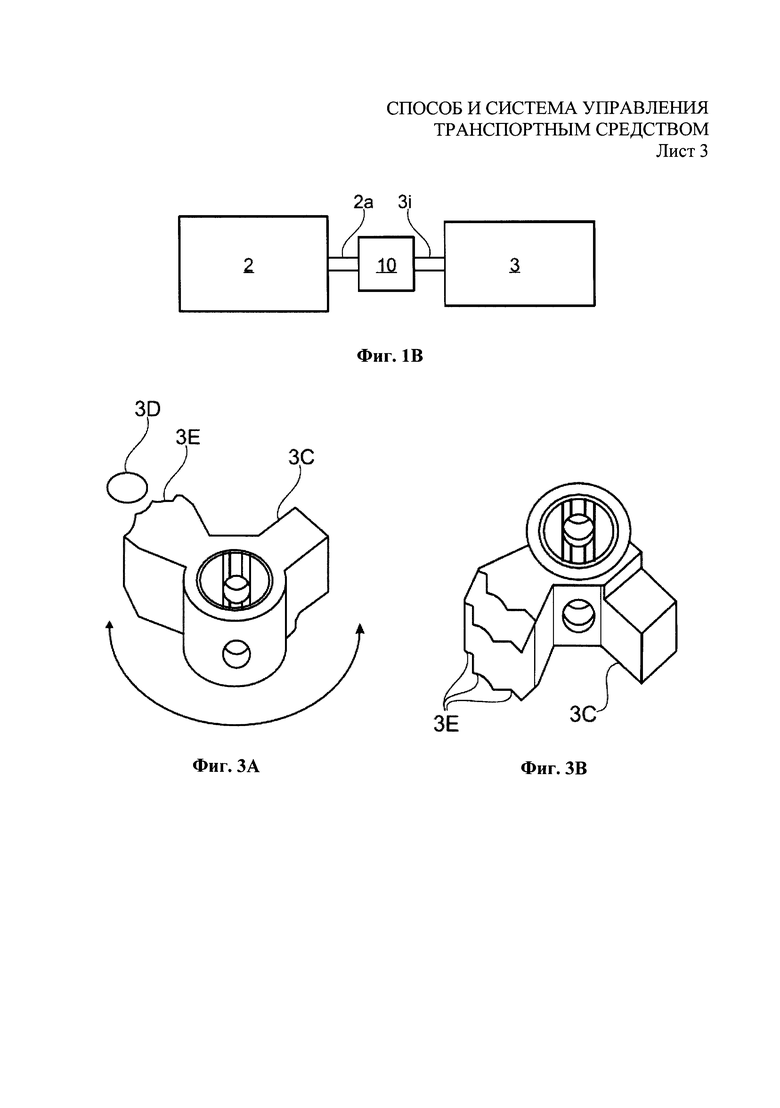
Фиг.1В представляет собой схематическое изображение части линии привода моторного транспортного средства, изображенного на Фиг.1А;
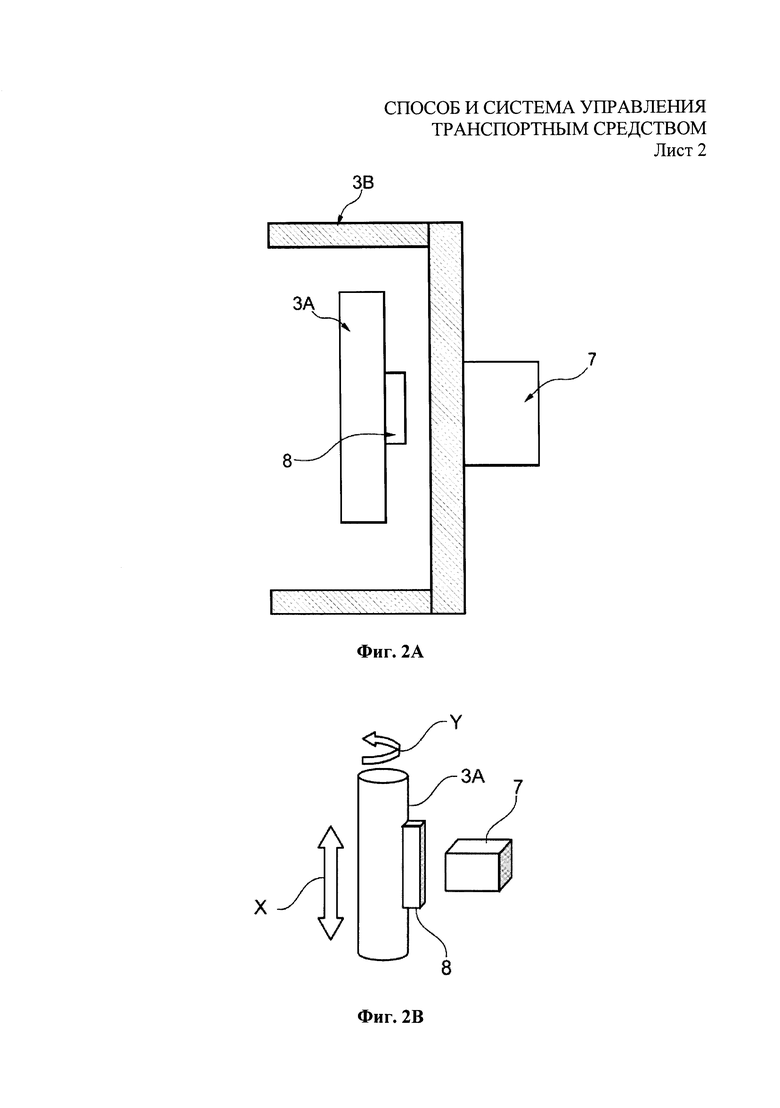
Фиг.2А представляет собой схематическое изображение части трансмиссии транспортного средства, показанного на Фиг.1, изображающее расположение двухкоординатного датчика выбранной передачи и двухкоординатной магнитной мишени;
Фиг.2 В представляет собой схематическое изображение, показывающее движения поворотного селекторного цилиндра переключения передач, осевое (по оси X) и угловое (по оси Y) положения которого считываются двухкоординатным датчиком выбранной передачи;
Фиг.3А представляет собой первое схематическое изображение ведомого механизма поворотного селекторного цилиндра;
Фиг.3В представляет собой второе схематическое изображение ведомого механизма поворотного селекторного цилиндра, изображенного на Фиг.3А;
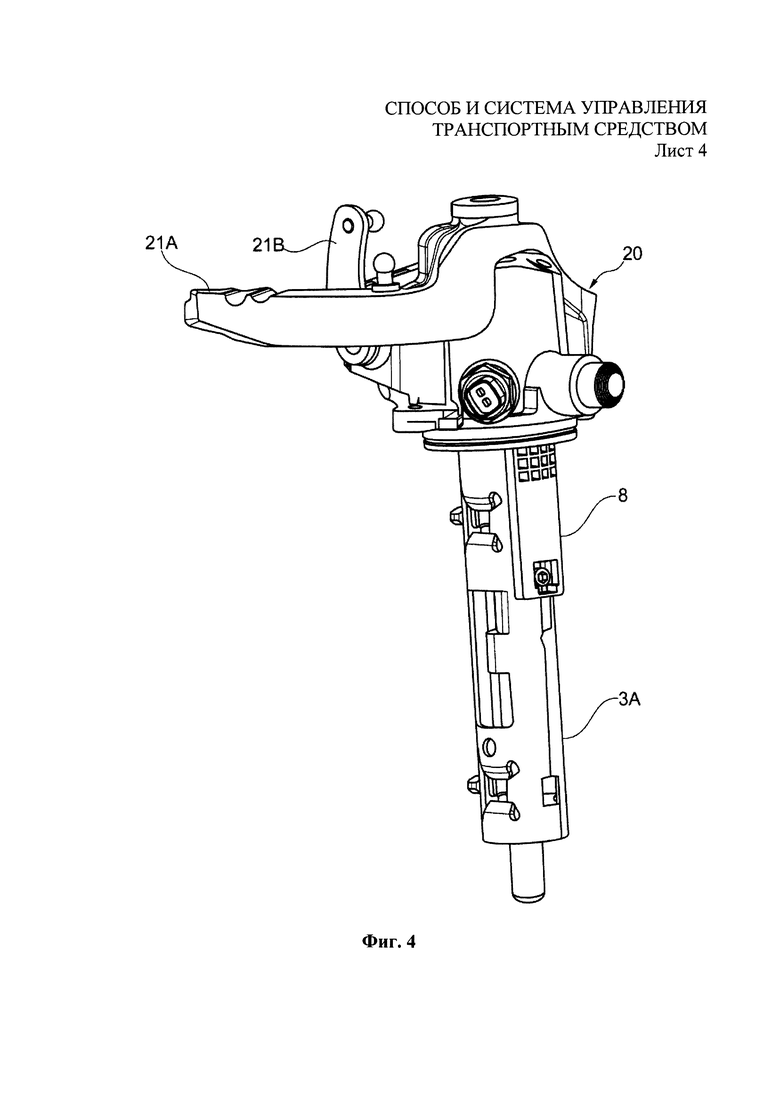
Фиг.4 представляет собой схематическое изображение поворотного механизма переключения передачи трансмиссии, более подробно изображающее поворотный селекторный цилиндр переключения передач, показанный на Фиг.2В;
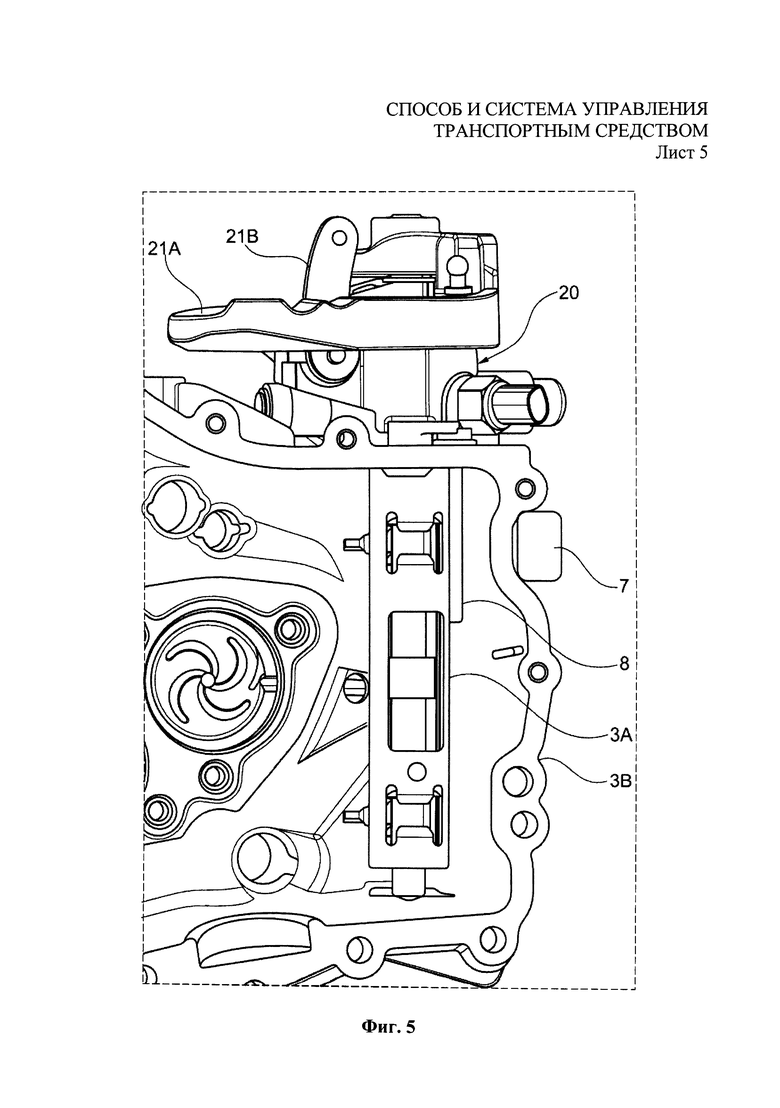
Фиг.5 представляет собой более подробное изображение части трансмиссии, изображенной на Фиг.2А, показывающее положение двухкоординатной мишени и массива двухкоординатных магнитных датчиков;
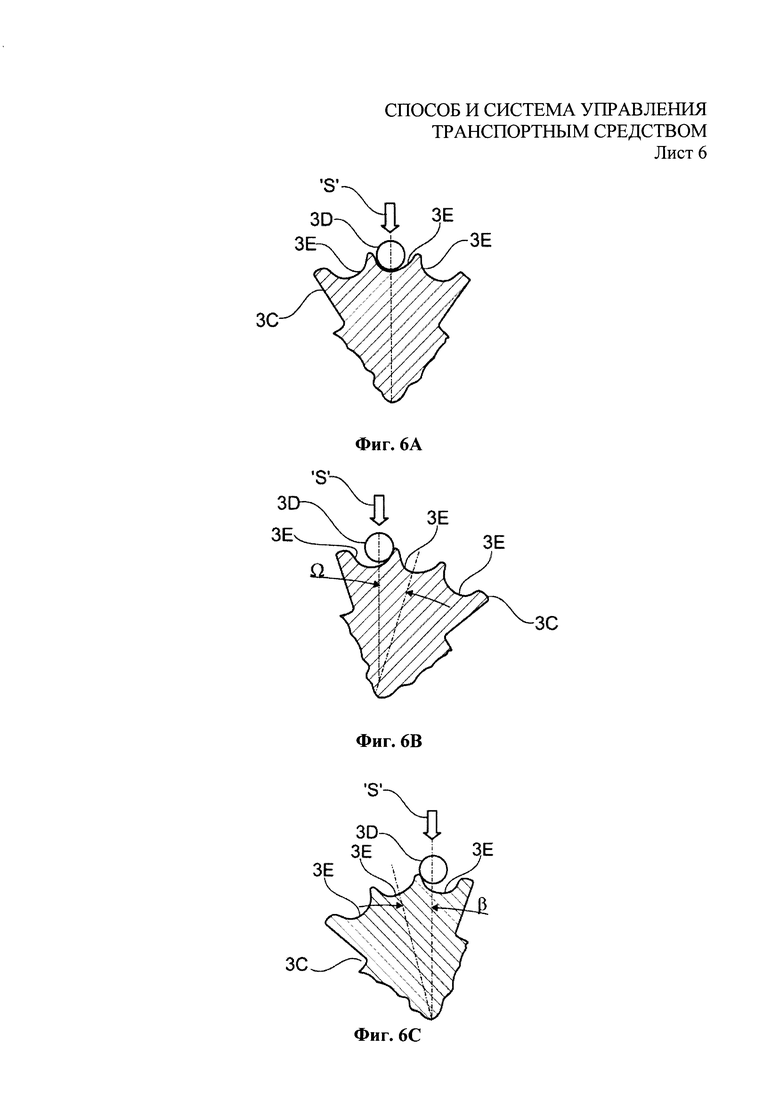
Фиг.6А представляет собой увеличенное сечение части ведомого механизма поворотного селекторного цилиндра с Фиг.3А и Фиг.3В, показывающее ведомый механизм поворотного селектора в положении нейтральной передачи;
На Фиг.6В показано увеличенное сечение части ведомого механизма поворотного селекторного цилиндра с Фиг.3А и Фиг.3В, показывающее ведомый механизм поворотного селектора в положении включенной четной передачи;
На Фиг.6С показано увеличенное сечение части ведомого механизма поворотного селекторного цилиндра с Фиг.3А и Фиг.3В, показывающее ведомый механизм поворотного селектора в положении включенной нечетной передачи;
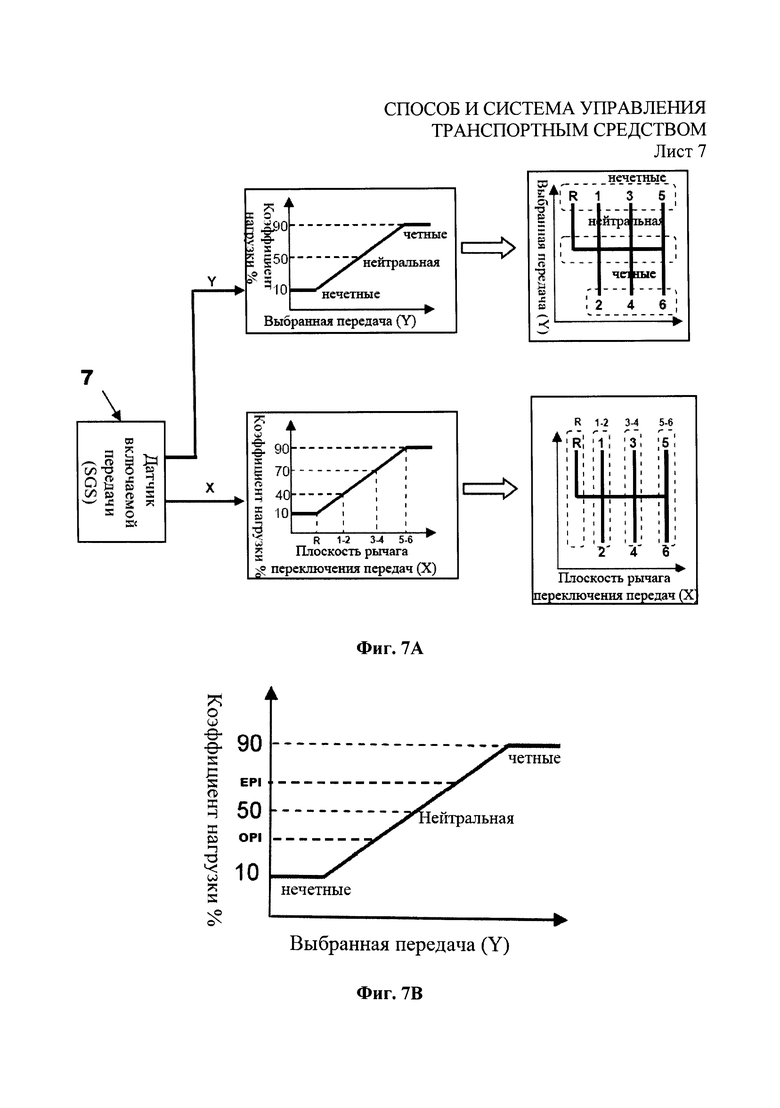
Фиг.7А представляет собой схему, показывающую зависимость между угловым и осевым положениями поворотного селекторного цилиндра трансмиссии, и соответствующими выходными сигналами двухкоординатного датчика выбранной передачи;
На Фиг.7В показано увеличенное изображение зависимости между угловым положением поворотного селекторного цилиндра и выходным сигналом, изображающее две контрольные точки на плоскости или в угловом положении согласно одному варианту прогнозирующей системы определения передачи по изобретению;
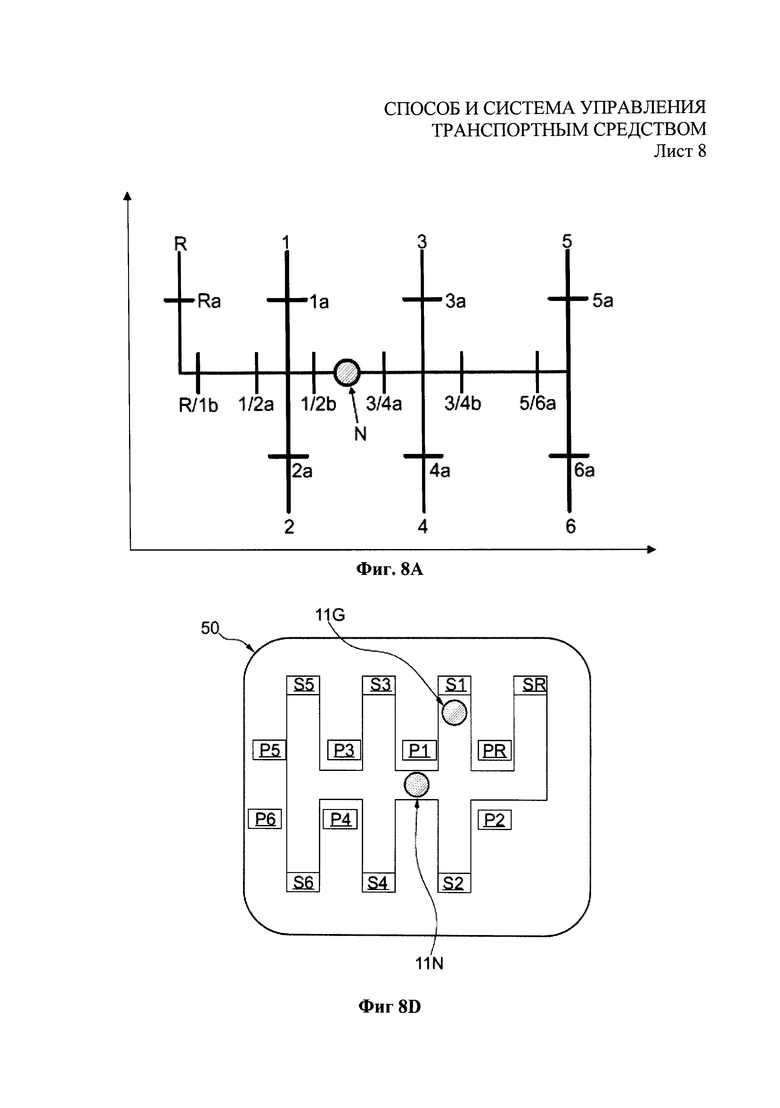
Фиг.8А представляет собой схематическое изображение кулисного селекторного механизма Н-типа, на котором показан ряд контрольных точек на плоскости и между плоскостями, в соответствии со вторым вариантом прогнозирующей системы определения передачи по изобретению;
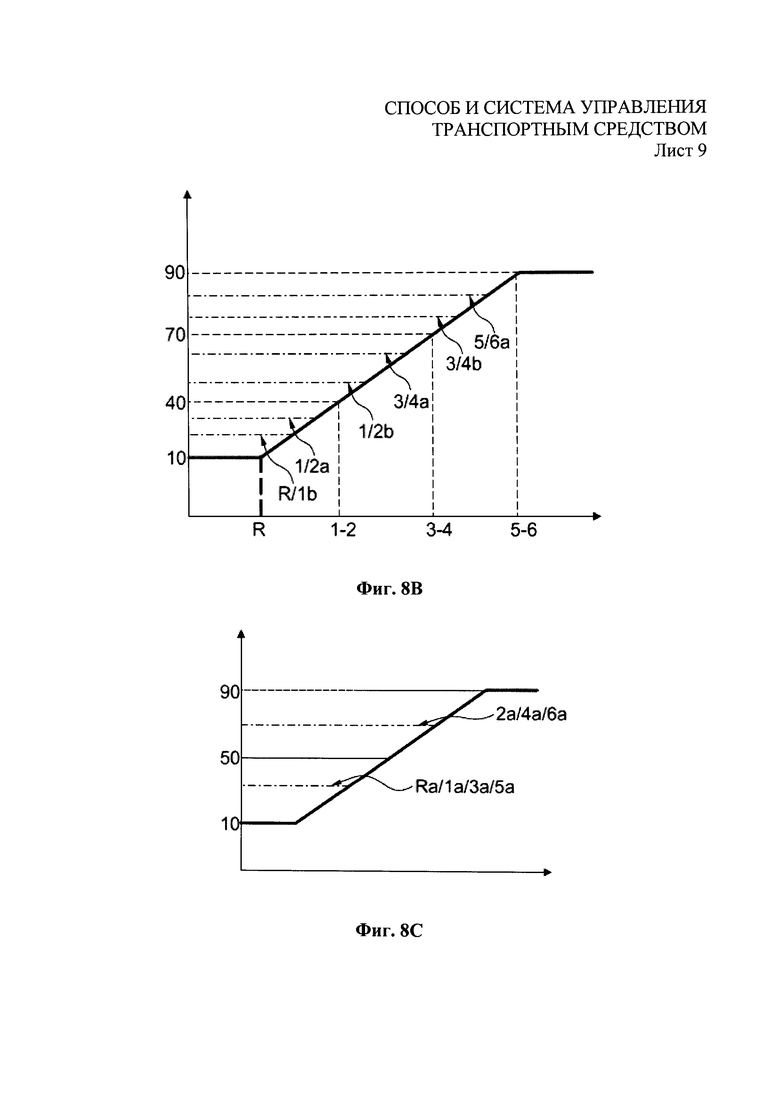
На Фиг.8В изображен график зависимости между осевым положением поворотного селекторного цилиндра и выходным сигналом, отображающий контрольные точки между плоскостями с Фиг.8А;
На Фиг.8С изображен график зависимости между угловым положением поворотного селекторного цилиндра и выходным сигналом, отображающий контрольные точки на плоскости с Фиг.8А;
На Фиг.8D показан вид снизу направляющей рычага кулисного механизма переключения передач Н-типа, показывающий расположение ряда датчиков рычага переключения передач, формирующих часть третьего варианта прогнозирующей системы считывания передачи;
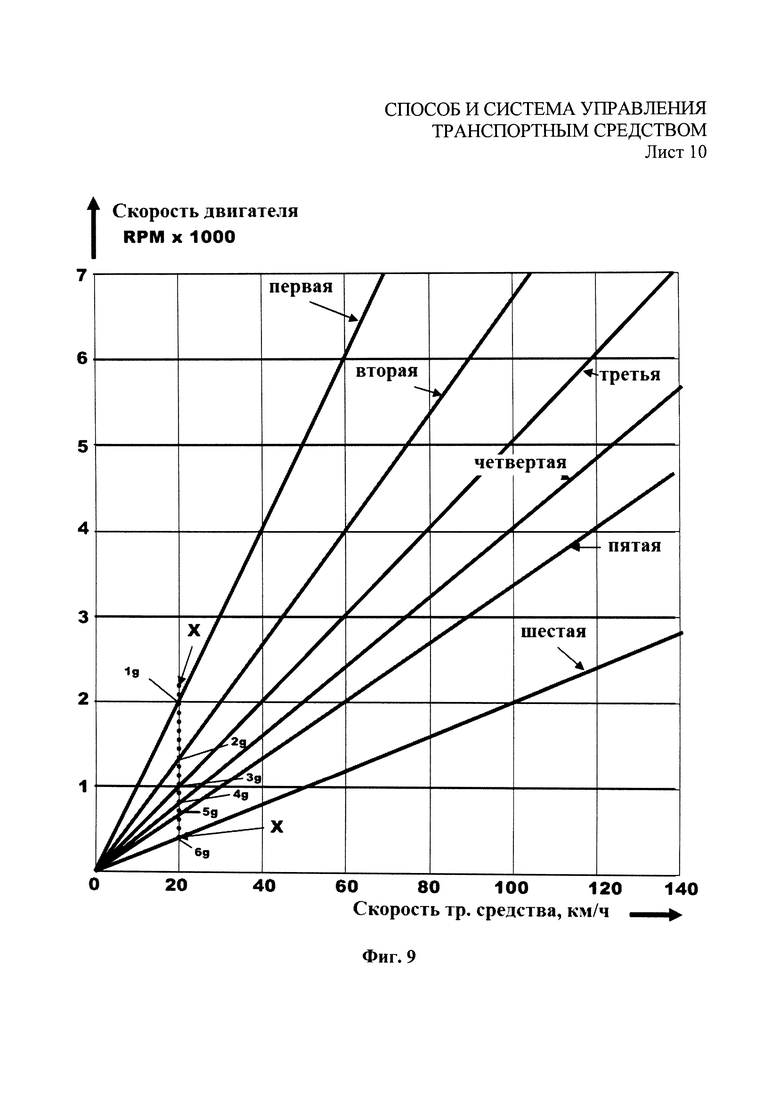
На Фиг.9 изображен график зависимости между скоростью транспортного средства и частотой вращения двигателя для различных передаточных отношений;
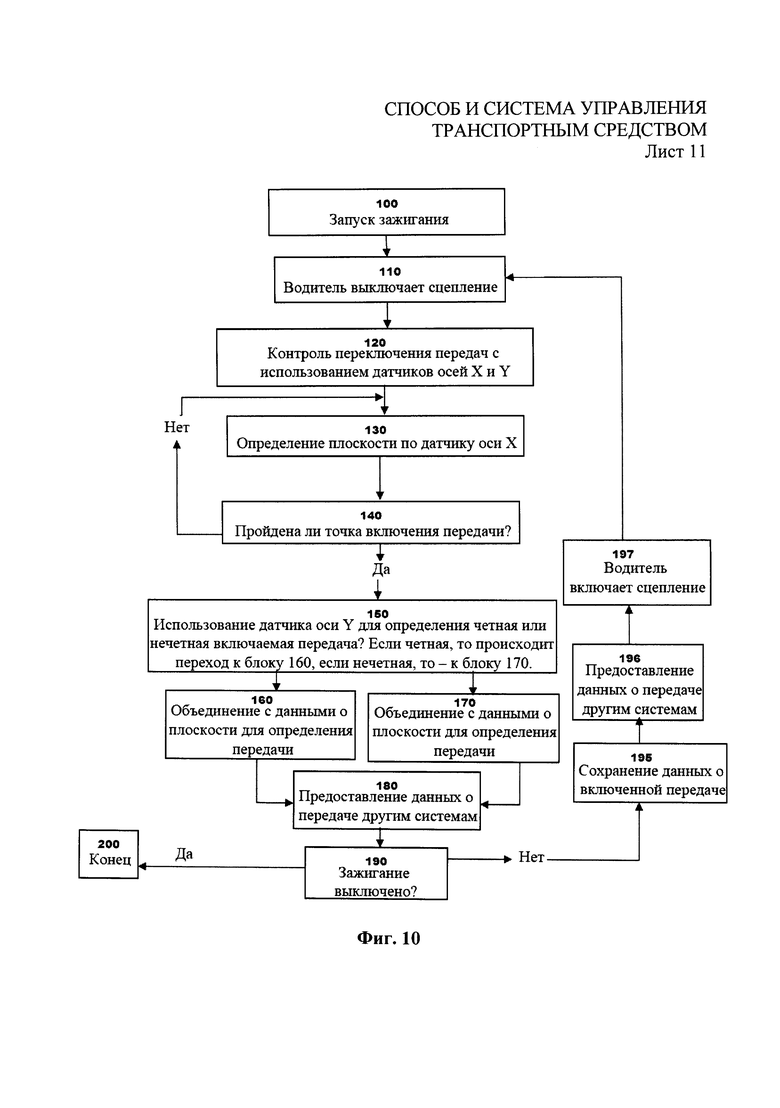
На Фиг.10 приведена упрощенная блок-схема первого варианта осуществления способа прогнозирования включения передачи;
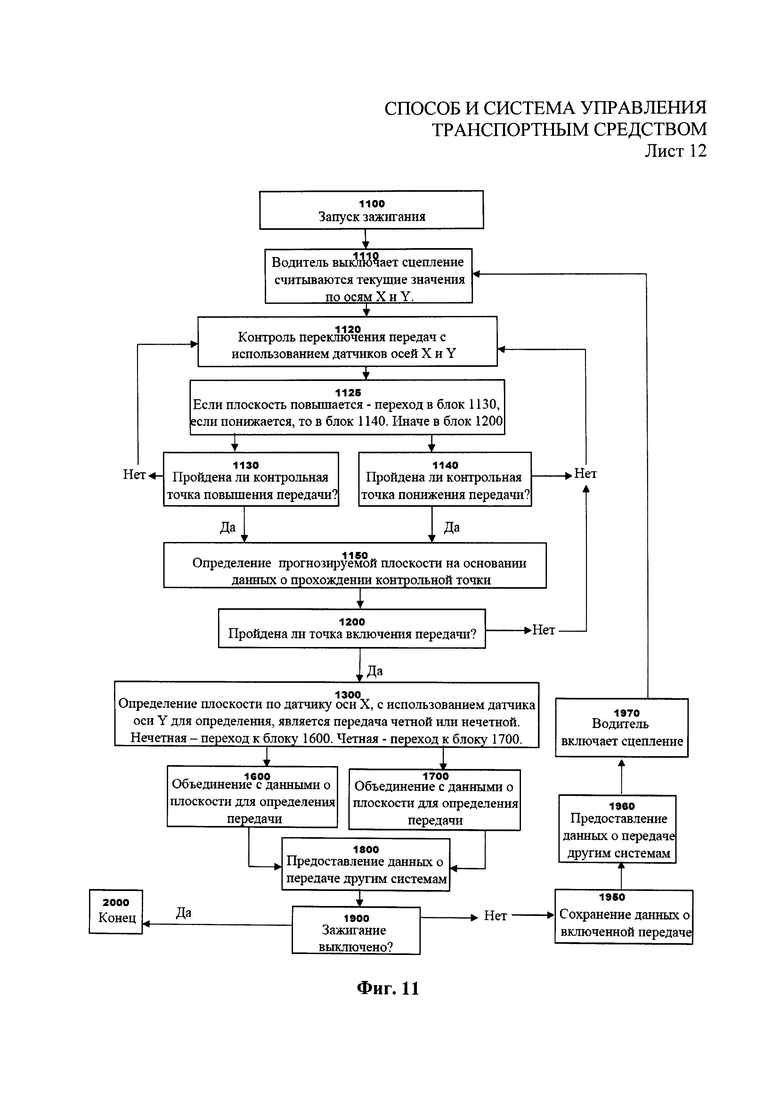
На Фиг.11 приведена упрощенная блок-схема второго варианта осуществления способа прогнозирования включения передачи;
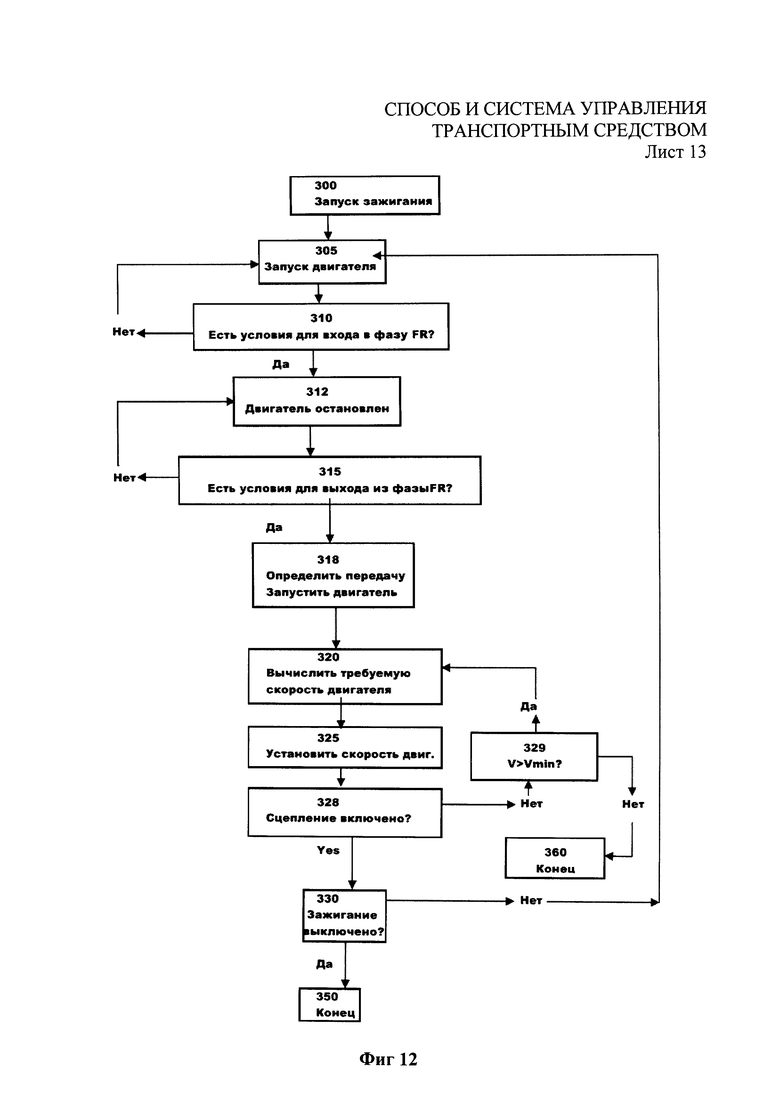
На Фиг.12 изображена упрощенная блок-схема управления транспортным средством во время выхода из фазы свободного качения;
Осуществление изобретения
На Фиг.1-6С изображено моторное транспортное средство 1, имеющее двигатель 2, соединенный приводом с механическим редуктором/трансмиссией 3 посредством муфты сцепления 10. Трансмиссия 3 включает в себя рычаг 11 переключения передач, посредством которого водитель может выбирать различные передачи трансмиссии 3 с использованием селекторного механизма переключения передач Н-типа (H-gate selector machanism).
Электронный блок обработки данных в форме модуля 4 управления силовой передачей (РСМ) для управления силовой передачей моторного транспортного средства 1. Управляющий модуль 4 включает в себя блок 6 управления двигателем для управления работой двигателя 2 и модуль 5 состояния трансмиссии для определения рабочего режима трансмиссии 3.
Управляющий модуль (РСМ) 4 принимает ряд входных сигналов с датчиков 9, включая сигналы от датчиков 9е частоты вращения двигателя, датчиков 9v скорости транспортного средства, связанных с колесом «W», датчиков 9 с положения педали сцепления, датчиков 9а положения педали газа, датчиков 9b положения педали тормоза, а также информацию от других возможных компонентов моторного транспортного средства 1.
Все или некоторые из входных сигналов от датчиков 9 могут быть использованы блоком 6 управления двигателем для управления работой двигателя 2, а именно частотой вращения двигателя 2. Следует принимать во внимание, что блок 6 управления двигателем и модуль 5 состояния коробки передач могут быть как отдельными элементами обработки данных, так и частями единого электронного процессора, как например модуль РСМ 4, как показано на чертежах.
Согласно Фиг.1B двигатель имеет ведомый вал 2а, который приводит в действие муфту сцепления 10 и вращается с такой же частотой, что и коленчатый вал двигателя 2. На практике ведомый вал 2а двигателя образован маховиком двигателя 2. Муфта сцепления 10 используется для разъемного соединения ведомого вала 2а с ведущим валом 3i трансмиссии 3, который в большинстве случаев сформирован ведущим валом трансмиссии 3.
Следует отметить, что когда муфта сцепления 10 находится в зацеплении без скольжения, частота вращения ведомого вала 2а двигателя равна частоте ведущего вала 3i трансмиссии. Когда муфта сцепления выключена, между частотой ведомого вала двигателя и частотой ведущего вала трансмиссии нет прямой связи. Однако частота ведущего вала трансмиссии связана со скоростью транспортного средства и передаточным числом трансмиссии 3 плюс «суммарное передаточное число конечной передачи» моторного транспортного средства 1.
Термин «суммарное передаточное число конечной передачи» означает сумму коэффициента качения колеса «W» и фактического передаточного числа линии привода, из которого может быть определена входная скорость трансмиссии 3 с использованием следующего уравнения:
TI=V×{RT×RC}
где:
TI - скорость вращения ведущего вала 3i трансмиссии 3, обороты в минуту;
V - скорость транспортного средства 1, метры в минуту;
RT - передаточное число выбранной передачи;
RC - суммарное передаточное число конечной передачи.
Например, если транспортное средство движется со скоростью 20 км/ч, тогда для одной трансмиссии 3 скорость ведущего вала будет равна:
где:
RT первой передачи=4:1
RT второй передачи=2,67:1
RT третьей передачи=2,0:1
RT четвертой передачи=1,6:1
RT пятой передачи=1,33:1
RT шестой передачи=0,8:1
и
RC=1,5:1
Следует отметить, что используемый термин «механическая трансмиссия» относится к трансмиссии, в которой различные передаточные числа выбираются водителем моторного транспортного средства 1 вручную путем перемещения рычага 11 переключения передач.
Следует также отметить, что зацепление и расцепление муфты сцепления 10 осуществляется водителем транспортного средства 1 вручную или посредством электронного управления в ответ на действия водителя, как в случае с электронной системой сцепления. Электронная система сцепления представляет собой муфту сцепления с электронным управлением, где положение педали сцепления отслеживается с помощью датчика, а зацепление/расцепление муфты сцепления осуществляется с помощью приводного механизма с электронным управлением.
Моторное транспортное средство 1 содержит первый вариант системы прогнозирования передачи, состоящей из модуля 5 состояния трансмиссии, двухкоординатной магнитной мишени 8 и двухкоординатного датчика 7 выбранной передачи, образующих в комбинации пару двухкоординатных датчиков переключения передачи. Модуль 5 состояния трансмиссии расположен так, чтобы принимать сигналы от датчика 7 выбранной передачи, прикрепленного к картеру 3В трансмиссии 3. Датчик 7 выбранной передачи является массивом двухкоординатных магнитных датчиков PWM, который передает сигналы, основанные на изменении магнитного потока между датчиком 7 выбранной передачи и двухкоординатной магнитной мишенью 8, связанной с устройством переключения передач в виде поворотного селекторного цилиндра 3А. Датчик 7 выбранной передачи совмещает датчик углового положения с датчиком смещения по оси в одном массиве двухкоординатных датчиков.
На Фиг.2А, 4 и 5 изображена типичная конфигурация трансмиссии Н-типа, состоящая из переключающего поворотного селекторного цилиндра 3А, расположенного внутри основного картера 3В трансмиссии. Переключающий поворотный селекторный цилиндр 3А вращается при движении рычага 11 переключения передач вперед и назад для выбора четной или нечетной передачи соответственно, и движется в осевом направлении при движении рычага 11 влево и вправо для смены плоскости рычага переключения передач, в которой осуществляется выбор передачи. Передача заднего хода может иметь конфигурацию четной или нечетной передачи, в зависимости от конфигурации трансмиссии 3. Следует отметить, что переключающий поворотный селекторный цилиндр можно расположить таким образом, что движения вперед и назад приводят к осевому движению селекторного цилиндра, а движения влево и вправо приводят к вращению селекторного цилиндра, следовательно, выходные данные массива двухкоординатных датчиков можно будет интерпретировать соответствующим образом.
Рычаг 11 переключения передач соединен посредством тросового привода с парой рычагов 21А, 21В, сформированных в виде части поворотного узла 20 переключения, который приводит в движение переключающий поворотный селекторный цилиндр 3А.
Двухкоординатная магнитная мишень 8 прикреплена к поворотному селекторному цилиндру 3А, и, в показанном примере, датчик 7 выбранной передачи расположен на внешней стороне картера 3В трансмиссии и детектирует осевые и вращательные перемещения магнитной мишени 8. Однако Следует отметить, что датчик 7 выбранной передачи можно установить внутри картера 3В трансмиссии.
На Фиг.2В показаны варианты перемещения магнитной мишени 8 при включении различных передач.
На Фиг.3А, 3В, 6А, 6В и 6С изображен ведомый механизм 3С, который прикреплен к селекторному цилиндру 3А и вращается вместе с ним. Ведомый механизм 3С имеет три фиксатора 3Е, центральный фиксатор соответствует положению нейтральной передачи, фиксатор для четной передачи расположен с одной стороны от нейтрального фиксатора, а для нечетной передачи - с другой стороны. Шарик 3D удерживается пружиной (схематически изображена стрелкой S на Фиг.6А, 6В и 6С) для стыковки с одним из фиксаторов 3Е. Шарик 3D в скользящем контакте опирается на корпус коробки передач 3В напрямую или посредством кронштейна. Следует отметить, что шарик 3D можно заменить на поддерживаемый пружиной штифт с полусферическим концом. Фиксаторы 3Е определяют первое, второе и третье угловые положения, соответствующие положению выбора для первого, второго рядов передач и нейтральной передачи трансмиссии 3. Выступы, расположенные между фиксаторами нейтрального положения и фиксаторами положения включенных передач определяют, будет ли трансмиссия 3 при освобождения рычага переключения передач 11 перемещаться в положение включенной передачи или нейтральное положение, что далее будет рассмотрено более подробно.
Начиная с трансмиссии 3, можно увидеть, что имеется физическая связь с магнитной мишенью 8 в виде механического соединения мишени 8 с селекторным цилиндром 3А, а также физическое соединение с датчиком 7 выбранной передачи в виде механического соединения датчика 7 с картером 3В трансмиссии.
Существует магнитная связь между датчиком 7 выбранной передачи и магнитной мишенью 8, таким образом, что изменение магнитного потока можно считывать с помощью датчика 7 для получения сигнала об угловом и осевом положении селекторного цилиндра 3А и, следовательно, о том, находится ли трансмиссия на четной передачи, нечетной передаче или в нейтральном положении, и какая из четных или нечетных передач включена.
Датчик 7 выбранной передачи постоянно генерирует выходные сигналы, указывающие на осевое и угловое положения селекторного цилиндра 3А, и эти сигналы используют для прогнозирования следующей включаемой передачи путем сравнения выходных сигналов различных контрольных точек.
Например, при проведении испытаний можно установить угловые положения цилиндра 3А при включенной передаче. Четные и нечетные положения при включенной передаче показаны на Фиг.6В и 6С соответственно.
На Фиг.6А цилиндр 3А изображен в нейтральном положении, а на Фиг.6В и 6С цилиндр 3А изображен в положениях включенной четной передачи (EPI) и включенной нечетной передачи (OPI). В данном случае точка включения четной передачи достигается, когда цилиндр 3А поворачивается на Ω градусов относительно нейтрального положения, а точка включения нечетной передачи достигается, когда цилиндра 3А поворачивается на -β градусов относительно нейтрального положения. Вращение по часовой стрелке цилиндра 3А представлено на Фиг.6А-6С в виде положительного угла, а вращение против часовой стрелки - в виде отрицательного угла.
Если известны угловые положения, при которых достигается включение передач (EPI и OPI), и датчик 7 выбранной передачи откалиброван так, что модуль 5 состояния трансмиссии способен определить по его сигналам, что эти угловые положения достигнуты, то это можно использовать для прогнозирования, является ли будущая передача четной или нет, до того, как она будет на самом деле включена. При комбинировании данной информации с осевым положением цилиндра 3А, полученной на основании сигнала об осевом положении, который генерируется датчиком 7 выбранной передачи, модуль 5 состояния трансмиссии способен определить точное положение следующей передачи, которая будет включена.
Специалистам в данной области техники понятно, что соответствующие точки включения четных и нечетных передач являются угловыми положениями цилиндра 3А, где различные действующие силы будут вращать цилиндр 3А так, что шарик 3D будет полностью зафиксирован соответствующим фиксатором, после чего включится соответствующая передача. Другими словами, в точке включения передачи и после ее прохождения трансмиссия автоматически будет включена на передачу, а в положении перед этой точкой трансмиссия вернется в положение нейтральной передачи.
Согласно Фиг.7А и 7В к модулю 5 состоянии трансмиссии поступают два входных сигнала: сигнал с данными об угловом положении (ось Y) и сигнал с данными об осевом перемещении (ось X). Точнее, датчик 7 выбранной передачи генерирует сигнал PWM на выходе, который находится в пределах диапазона (между 10% и 90%) или вне диапазона (>90% или<10%). Программный драйвер ввода информации в модуле 5 состояния трансмиссии обрабатывает PWM-сигнал, и, если он выходит за пределы (>90% или<10%) драйвер выдает данный сигнал за ошибку. Следует отметить, что диапазон от 10%) до 90% указан в качестве примера и не является ограничивающим.
Если PWM-сигнал находится в пределах диапазона (между 10% и 90%), драйвер считает сигнал нормальным. Затем модуль 5 состояния трансмиссии сравнивает PWM-сигнал с пороговым значением, чтобы определить, выбрана или нет нейтраль, выбрана или нет четная передача, выбрана или нет нечетная передача, была ли достигнута точка включения OPI и была ли достигнута точка включения EPI.
На Фиг.7А видно, что шестиступенчатая трансмиссия имеет традиционное выполнение переключающего механизма Н-типа с нечетными передачами, расположенными в одном ряду с передачей заднего хода, и четными передачами, расположенными в другом ряду. Также видно, что передачи расположены в ряде плоскостей рычага управления переключением передач, на одной из которых расположена передача заднего хода, а на следующих плоскостях по две передачи переднего хода: первая и вторая передачи (плоскость 1/2), третья и четвертая передачи (плоскость 3/4) и пятая и шестая передачи (плоскость 5/6).
На Фиг.7В видно, что если PWM-сигнал в основном составляет 90%, модуль 5 состояния трансмиссии интерпретирует это как указание на то, что выбрана одна из четных передач. Если PWM-сигнал, в основном, составляет 10%, модуль 5 состояния трансмиссии интерпретирует это как указание на то, что выбрана одна из нечетных передач. Если же PWM-сигнал, в основном, составляет 50%, модуль 5 состояния трансмиссии интерпретирует это как указание на то, что выбрано нейтральное положение.
Следует отметить, что на практике могут иметь место интервалы допуска применительно ко всем указанным фигурам, например, модуль 5 состояния трансмиссии может нормально работать для следующих угловых направлений с осуществлением логических проверок:
Если 85%<PWM-сигнал<90%, то включена четная передача; (1)
Если 10%<PWM-сигнал<15%, то включена нечетная передача; (2)
Если 45%<PWM-сигнал<55%, то передача на нейтрали. (3)
В дополнение к этой оценке модуль 5 состояния трансмиссии также сравнивает сигнал углового положения датчика 7 выбранной передачи с двумя поворотными контрольными точками для точек включения четной передачи (EPI) и точек включения нечетной передачи (OPI), которые используются для прогнозирования следующей включаемой передачи.
Например, как изображено на Фиг.7В, модуль 5 состояния трансмиссии осуществляет следующие проверки для углового положения:
Если PWM-сигнал<30%, то прогнозная следующая передача является нечетной; (4)
Если PWM-сигнал<70%, то прогнозная следующая передача является четной. (5)
Где заранее заданные поворотные контрольные точки EPI и OPI это 70% и 30% соответственно.
Используя данную логику, модуль 5 состояния трансмиссии способен предсказать следующую передачу до ее непосредственного включения путем объединения результатов проверки с осевым положением цилиндра 3А. Данная информация может быть направлена на несколько миллисекунд раньше (20-40 мс) другим системам управления, нуждающимся в ней, например, индикатору передачи интерфейса водителя (HMI) или блоку 6 управления двигателем непосредственно перед включением передачи.
Следует отметить, что датчик 7 выбранной передачи также можно расположить так, чтобы когда трансмиссия 3 находится в нейтральном положении, соответствующая норма сигнала составляла бы 50%, когда рычаг переключения передач передвинут вперед на одну из нечетных передач, норма сигнала превышала бы 50%, а когда выбрана одна из четных передач, норма сигнала была бы ниже 50%. Таким образом, вышеописанные логические проверки будут иметь противоположные условия, например:
Если 85%<PWM-сигнал <90%, то включена нечетная передача; (1')
Если 10%<PWM-сигнал <15%, то включена четная передача (2')
Если 45%<PWM-сигнал <55%, то передача на нейтрали (3')
Если PWM-сигнал <30%, то прогнозная следующая передача является четной; (4')
Если PWM-сигнал <70%, то прогнозная следующая передача является нечетной. (5')
Возвращаясь к Фиг.7А, можно увидеть, что показан выходной сигнал с датчика 7 выбранной передачи для осевого направления (или по оси X), а также можно видеть, что для шестиступенчатой трансмиссии показано в качестве примера следующее:
Если PWM-сигнал=10%, то выбрана плоскость передачи заднего хода;
Если PWM-сигнал=40%, то выбрана плоскость первой/второй передачи;
Если PWM-сигнал=70%, то выбрана плоскость третьей/четвертой передачи;
Если PWM-сигнал=90%, то выбрана плоскость пятой/шестой передачи.
Как ранее было сказано, для данных схем применимы отклонения в пределах допуска, чтобы предусмотреть износ или неточности конструкции, на практике модуль состояния трансмиссии может применять для осевого направления следующие логические проверки:
Если 10%<PWM-сигнал <15%, то выбрана плоскость передачи заднего хода; (6)
Если 37,5%<PWM-сигнал <42,5%, то выбрана плоскость первой/второй передачи; (7)
Если 67,5%<PWM-сигнал <72,5%, то выбрана плоскость третьей/четвертой передач; (8)
Если 85%<PWM-сигнал <90%, то выбрана плоскость пятой/шестой передач; (9)
Модуль 5 состояния трансмиссии может использовать логические проверки (4) и (5) вместе с одной из проверок (6)-(9) для прогнозирования следующей включаемой передачи (N2G), как показано ниже в таблице 1.
Модуль 5 состояния трансмиссии после этого может подтвердить, когда передача уже включена, после чего данные о включенной передаче (EG) принимаются с датчика 7 выбранной передачи с использованием описанных выше логических проверок (1) и (2) в комбинации с одной из проверок (6)-(9), как показано ниже в таблице 2.
Таким образом, прогнозирующая система определения передачи также предоставляет информацию в отношении того, какая передача включена в данный момент.
Следует отметить, что в отличие от угловой калибровки осевая калибровка может соответствовать 10%=шестая передача и 90%=передача заднего хода. В таком случае логические проверки для плоскости будут отличаться от указанных выше.
Несмотря на то, что система прогнозирования включения передачи была описана по отношению к использованию магнитного PWM-датчика, в котором используется двухкоординатный магнит и генерируется выходной PWM-сигнал, изобретение не ограничивается такими датчиками, и равно применимо для использования с датчиком перемещения, который вместо PWM-сигнала генерирует выходной сигнал переменного напряжения.
Также следует отметить, что система прогнозирования включения передачи не ограничивается использованием одного массива двухкоординатных магнитных датчиков 7 в качестве датчика выбранной передачи. Можно использовать трехмерный датчик и магнитную схему или два отдельных датчика: один для углового движения, другой - для осевого.
Также следует иметь в виду, что изобретение не ограничивается шестиступенчатой коробкой передач или расположением передачи заднего хода, показанным на Фиг.7А, а также что изобретение может быть применимо для трансмиссии с различным числом передач переднего хода или для различного расположения передачи заднего хода с тем же самым положительным эффектом.
На Фиг.8А-8С показана часть второго варианта системы прогнозирования включения передачи, которая по большей части идентична описанной ранее и не будет снова подробно рассматриваться.
Основное различие между вторым и первым вариантами, описанными выше, заключается в том, что в дополнение к контрольным точкам плоскостей включения передач, относящимся к расположенным на плоскости точкам включения, также предоставляется множество контрольных точек промежуточных плоскостей, расположенных между плоскостями переключения передач.
На Фиг.8А изображен ряд контрольных точек Ra, 1a, 2а, 3а, 4а, 5а и 6а, расположенных в плоскостях переключения. Контрольные точки 1а, 3а и 5а соответствуют точкам включения нечетных передач (OPI), а контрольные точки 2а, 4а, и 6а соответствуют точкам включения четных передач (EPI). Система прогнозирования включения передачи работает, как описано выше применительно к данным контрольным точкам, и, как описано выше, она также способна прогнозировать следующую включаемую передачу.
В дополнение к этим контрольным точкам Ra, 1a, 2а, 3а, 4а, 5а и 6а также имеется ряд контрольных точек R/1b, 1/2b, 3/4b и 1/2а, 3/4а, 5/6а промежуточных плоскостей.
Функцией контрольных точек промежуточных плоскостей является предварительное определение возможной плоскости, которая будет выбрана, пока трансмиссия 3 остается на нейтральной передаче.
На Фиг.8В изображены контрольные точки R/1b, 1/2b, 3/4b, 1/2а, 3/4а и 5/6а промежуточных плоскостей в виде выходных PWM-сигналов выраженных в процентах от выходного сигнала датчика осевого перемещения и датчика 7 выбранной передачи. Фиг.8С дублирует Фиг.7В с изображением контрольных точек на Фиг.8С (Ra, 1a, 3а, 5а, 2а, 4а и 6а), соответствующих контрольным точкам OPI и EPI на Фиг.7В.
Так как контрольные точки промежуточных плоскостей являются заданными точками, они не подвержены влиянию отклонений допуска в механизме, т.е. всегда можно использовать единственные значения.
Например, контрольные точки, изображенные на Фиг.8А и 8В имеют следующие значения % PWM-сигнала:
R/1b=17,5%
1/2а=32,5%
1/2b=45%
3/4а=65%
3/3b=75%
5/6а=85%
Эти данные используются для заблаговременного определения в цикле смены передач плоскости, которая вероятно будет выбрана, и, таким образом, одного из двух потенциальных передаточных чисел.
Таким образом, система предварительного определения передачи согласно второму варианту способна предоставить дополнительное время для любых других операций, таких как согласование переключения передач (GSH), и входной скорости трансмиссии за счет предоставления заблаговременной индикации требуемого действия.
Следует отметить, что время, требуемое водителю для перемещения рычага 11 переключения передач с нейтрали на передачу относительно мало, значит, любая дополнительная информация о включаемой передаче, полученная как можно раньше в процессе переключения передач, является весьма полезной для систем, которым необходимы данные о выбранной передаче.
На Фиг.10 показаны основные шаги, необходимые для осуществления первого варианта способа прогнозирования включаемой передачи для многоступенчатой механической трансмиссии вышеописанного типа.
Способ начинается с этапа 100 с запуска зажигания и затем на этапе 110 водитель выключает муфту сцепления (нажатием на педаль сцепления), готовясь к переключению передачи или к выбору передачи.
Далее способ переходит к этапу 120, в котором датчик 7 выбранной передачи используется для контроля движения элемента переключения передач, такого как цилиндр 3А, на этапе 130 определяется плоскость рычага переключения передачи. Другими словами, на этапе 130 определяется, в какой плоскости находится на данный момент рычаг переключения передач.
Далее на этапе 140 определяется, достигнута ли одна из контрольных точек включения передачи или точек на плоскости EPI или OPI. Если одна из контрольных точек EPI или OPI была достигнута, способ переходит на этап 150, в противном случае, действие возвращается к этапу 130 и продолжает циклически выполняться до тех пор, пока не будет достигнута одна из контрольных точек EPI или OPI.
На этапе 150 определяется, какая из контрольных точек в плоскости была достигнута, и на основании этого решения способ переходит либо к этапу 160, если была достигнута контрольная точка в плоскости нечетной передачи (OPI), либо к этапу 170, если была достигнута контрольная точка четной передачи (EPI).
На этапах 160 и 170 информация о плоскости из этапа 130 объединяется с информацией о том, четная или нечетная будет выбрана передача, для предоставления прогнозных данных о следующей передаче, которая должна быть выбрана, а на этапе 180 данная информация предоставляется любой нуждающейся в ней системе.
Далее способ переходит к этапу 190, на котором определяется, произошло ли выключение двигателя, и если да, то способ завершается на этапе 200, а в противном случае способ переходит к этапу 195, в котором данные о включенной передаче сохраняются для будущего использования. Затем информация предоставляется этапу 196 для систем, которым требуются данные о текущем положении передачи, в качестве подтверждения предварительных данных этапа 180.
Далее способ переходит к этапу 197, на котором водитель снова задействует муфту сцепления 10 и затем на этапе 197 происходит пауза до следующего разъединения муфты сцепления 10, и с этого момента способ возвращается на этап 110, чтобы начаться заново.
На Фиг.11 показаны основные шаги, требуемые для осуществления второго варианта способа прогнозирования включаемой передачи для многоступенчатой механической трансмиссии вышеописанного типа.
Способ начинается с этапа 1100 с запуска зажигания и затем на этапе 1110 водитель разъединяет муфту сцепления (нажатием на педаль сцепления), готовясь к переключению или выбору передачи, при этом считываются сохраненные значения зафиксированных данных об осевом и угловом положениях или о выбранной в данный момент передаче.
Далее способ переходит к этапу 1120, на котором датчик 7 выбранной передачи используется для контроля движения элемента переключения передач, такого как цилиндр 3А, и на этапе 1125 определяется, движется ли рычаг в той же плоскости (% PWM-сигнала является постоянным), движется вверх на повышение передачи (% PWM-сигнала увеличивается) или вниз на понижение (% PWM-сигнала уменьшается). На основании этих данных способ переходит к этапу 1200, если плоскость не изменилась, к этапу 1130, если передача повышается, и к этапу 1140, если передача понижается.
На этапе 1130 происходит проверка, была ли пройдена контрольная точка повышения передачи промежуточной плоскости, и если да, то действие переходит к этапу 1150. В противном случае, способ возвращается к этапу 1120. На этапе 1140 происходит проверка, была ли пройдена контрольная точка понижения передачи промежуточной плоскости, и если да, то действие переходит к этапу 1150. В противном случае, способ возвращается к этапу 1120.
Этапы 1130 и 1140 позволяют использовать различные контрольные точки повышения и понижения передач промежуточных плоскостей. Но Следует отметить, что если одинаковые контрольные точки используются независимо от направления переключения, действие может перейти из этапа 1120 на этап, проверяющий, были ли пройдены контрольные точки промежуточных плоскостей, и если да, то действие переходит на этап 1150. В противном случае, действие возвращается на этап 1120.
На этапе 1150 данные о промежуточной плоскости будущей передачи положения рычага переключения передач на основании пройденной контрольной точки предоставляется любым системам, нуждающимся в информации, будет ли следующая передача скорее всего ниже или выше, чем включенная до этого передача. Это может представлять собой многоуровневый этап, при котором информация обновляется по мере прохождения различных контрольных точек промежуточных плоскостей, перед прохождением на этапе 1200 точки включения передачи. Другими словами, если проверка на этапе 1200 заканчивается отрицательно, действие переходит к этапу 1150, а не к этапу 1120, как показано.
Продолжая с этапа 1200, в котором определяется, была ли достигнута точка включения передачи, то есть контрольная точка на плоскости. Контрольные точки на плоскости, EPI и OPI, используются, как и раньше, для определения того, будет ли следующая передача четной или нечетной. Если точка включения передачи не была достигнута, способ переходит обратно к этапу 1120, а если точка включения передачи была достигнута, способ переходит к этапу 1300, на котором определяется плоскость рычага переключения передач, а также то, относится ли достигнутая точка включения к четной передаче или к нечетной.
Далее на этапах 1600 и 1700 данные о плоскости, в которой находится рычаг 11, из этапа 1300 объединяются с данными о направлении переключения для осуществления прогнозирования следующей выбранной передачи.
Затем на этапе 1800 эти данные предоставляются любым системам, которым это необходимо.
Далее способ переходит к этапу 1900, на котором определяется, был ли выключен двигатель, и если да, то способ завершается на этапе 2000, а в противном случае, действие переходит к этапу 1950, на котором данные о включенной передаче сохраняются для будущего использования. Затем информация предоставляется этапу 1960 для систем, требующих данные о текущем положении передачи в качестве подтверждения предварительных данных этапа 1800.
Далее действие переходит к этапу 1970, на котором водитель повторно задействует муфту сцепления 10, и затем на этапе 1970 происходит пауза до следующего разъединения муфты сцепления 10, и с этого момента способ начинается снова с этапа 1110.
Следует отметить, что два вышеизложенных варианта осуществления способа прогнозирования следующей включаемой передачи представлены в качестве примера и изобретение не ограничивается конкретными действиями или порядком их осуществления.
На Фиг.8Б показан датчик прогнозирования передачи, формирующий часть третьего варианта осуществления системы прогнозирования передачи, которую можно использовать вместо двух вышеизложенных вариантов осуществления изобретения.
В данном случае движение рычага 11 переключения передач отслеживается при помощи большого количества отдельных датчиков SR, S1, S2, S3, S4, S5, S6; PR, P1, Р2, Р3, Р4, Р5 и Р6. Рычаг переключения передач оснащен закрепленной на нем магнитной мишенью (не показано), и когда она проходит мимо или вблизи одного из датчиков SR, S1, S2, S3, S4, S5, S6; PR, P1, Р2, Р3, Р4, Р5 и Р6, возникает магнитная связь, которая отслеживается в модулем 5 состояния трансмиссии, таким образом формируя систему прогнозирования передачи.
Изображено два типа датчиков. Каждый из датчиков первого типа SR, S1, S2, S3, S4, S5 и S6 предоставляет сигнал, который можно использовать для определения того, когда трансмиссия 3 полностью находится на соответствующей передаче, с которой они связаны. Датчики второго типа PR, P1, Р2, Р3, Р4, Р5 и Р6 являются датчиками контрольных точек, которые предоставляют сигнал, который можно использовать для определения того, когда трансмиссия 3 находится почти на передаче. Другими словами, второй тип датчиков используется для индикации достижения вышеупомянутых точек включения передачи. Но они не только указывают на то, является ли включаемая передача четной или нечетной, но также предоставляют информацию о плоскости рычага переключения передач, а значит, они точно определяют включаемую передачу. На Фиг.8D рычаг 11 переключения передач изображен в положении 11G первой передачи и в нейтральном положении 11N.
Следует отметить, что следующие датчики (не показано) должны быть размещены между плоскостями механизма переключения передач Н-типа для обеспечения обратной связи по движению между плоскостями, тем самым, предоставляя информацию, аналогичную предоставляемой контрольными точками R/1b, l/2b, 3/4b и 1/2а, 3/4а, 5/6а, изображенными на Фиг.8А.
Использование такой системы в некоторых обстоятельствах предоставляет больше времени для согласования или синхронизации частоты вращения двигателя с частотой ведущего вала 31 трансмиссии 3.
В механизме механической трансмиссии, как только муфта сцепления 10 выключается, пропадает связь между частотой вращения двигателя 2 и частотой ведущего вала трансмиссии 3, и, даже если установить датчик угловой скорости на ведущий вал 31 трансмиссии 3, это не даст никакой полезной информации до включения передачи, т.е. для смены передачи рычаг должен пройти нейтральную передачу, и в течение этого периода времени окончательная частота ведущего вала 3i коробки передач 3 будет неизвестна. Таким образом, единственным доступным для регулировки частоты вращения двигателя периодом времени является период после включения передачи, когда водитель включает муфту сцепления 10.
Однако согласно данному изобретению, следующая включаемая передача может быть спрогнозирована с помощью системы прогнозирования передачи, так что имеется больше времени для того, чтобы выполнить синхронизацию частоты ведомого вала двигателя 2а с ведущим валом 3i трансмиссии 3. Это означает, что необходимая синхронизируемая скорость известна до фактического включения передачи при использовании системы FRIN или системы FRIG, когда новая передача выбирается либо при прохождении через контрольную точку переключения, либо при прохождении через контрольные точки промежуточных плоскостей или разных плоскостей, что обеспечивает большее количество времени на установку скорости вращения двигателя на требуемое значение.
Из Фиг.9 изображен график зависимости частоты двигателя от скорости моторного транспортного средства 1, изображенного на Фиг.1.
Линия Х-Х показывает различные частоты вращения двигателя 1g-6g для передач с первой по шестую для скорости транспортного средства равной 20 км/час.
Из Фиг.9 видно, что соответствующие значения частоты вращения двигателя следующие:
Первая передача-2000 об/мин; вторая передача 1333 об/мин; третья передача 1000 об/мин; четвертая передача 800 об/мин; пятая передача 667 об/мин; шестая передача 400 об/мин.
Таким образом, в зависимости от передачи, выбранной для выхода из фазы свободного качения, частота вращения двигателя 2 теоретически должна быть установлена на значение в диапазоне от 2000 об/мин до 400 об/мин. Однако на практике водитель, вероятно, знает, что при таких низких скоростях наиболее подходящими передачами для выхода из фазы свободного качения являются только первая, вторая и третья передачи. В некоторых вариантах изобретения система оснащена предупредительным устройством для водителя, если выбранная передача является слишком низкой или высокой. Например, если частота вращения двигателя ниже 1000 об/мин или выше 3000 об/мин, водителю выдается предупреждение, которое может представлять собой, звуковой или световой сигнал, например, загоревшаяся лампа аварийной сигнализации, или оба вида сигналов.
В другом варианте воплощения данного изобретения муфта сцепления 10 имеет электронное управление. В этом случае зацепление муфты сцепления 10 может быть заблокировано при слишком низкой или слишком высокой выбранной передаче.
Кроме того, если скорость моторного транспортного средства 1 во время фазы свободного качения падает ниже заранее заданного минимального значения, процесс выхода из данной фазы прекращается, и электронный контроллер начинает работать в качестве стандартного контроллера старт-стопного режима. Таким образом, если скорость транспортного средства приближается к нулю или равно нулю, фаза свободного качения завершается, транспортное средство останавливается.
Система контроля моторного транспортного средства 1 во время выхода из фазы свободного качения в соответствии с первым вариантом осуществления функционирует следующим образом.
Модуль 4 управления силовой передачей принимает входные сигналы от различных датчиков, а именно от датчика 9v скорости транспортного средства, датчика 9е частоты вращения двигателя и датчика 7 выбранной передачи.
Скорость моторного транспортного средства 1 используется для осуществления оценки требуемой частоты вращения двигателя и постоянно контролируется и обновляется. Следует отметить, что для получения входных данных о скорости транспортного средства можно использовать и другие средства, как например данные глобальной навигационной спутниковой системы GPS. При этом изобретение не ограничено использованием только датчиков скорости транспортного средства.
Модуль 5 состояния трансмиссии предоставляет блоку 6 управления двигателем информацию о предсказанной следующей включаемой передаче описанным ранее способом. Блок 6 управления двигателем использует данную информацию для регулировки частоты вращения двигателя до требуемого значения, полученного на основании информации о текущей скорости транспортного средства. Таким образом, ошибки во время синхронизации скорости сводятся к минимуму, что гарантирует плавное включение двигателя. Если используемая информация основана на спрогнозированной передаче, то требуемая частота вращения двигателя, либо подтверждается, либо регулируется (когда известна включенная передача).
Также Следует отметить, что в других предпочтительных вариантах осуществления изобретения информация, предоставленная блоку 6 управления двигателем, может являться требуемой частотой вращения двигателя, а также то, что в этом случае блок 6 управления двигателем просто производит регулировку частоты вращения двигателя до нужного значения.
Таким образом, обобщая вышесказанное, представлена система управления выходом из фазы свободного качения. Данная система содержит двигатель 2, обеспечивающий привод трансмиссии 3 через муфту сцепления 10; датчик передачи для предоставлении информации о текущем состоянии трансмиссии 3 модулю 4 управления силовой передачей, в частности модулю 5 состояния трансмиссии; блок 6 управления двигателем для управления и регулирования частоты вращения двигателя 2; и источник информации, указывающей на скорость моторного транспортного средства 1 для использования модулем 4 управления силовой передачей.
На Фиг.12 изображен в общем виде вариант воплощения способа управления транспортным средством с системой FRIN во время выхода из фазы свободного качения.
Способ начинается с выполнения этапа 300 с запуска зажигания, затем он продолжается на этапе 305, на котором двигатель 2 запущен, а транспортное средство функционирует в обычном режиме, как и все остальные транспортные средства.
Далее процесс переходит к выполнению этапа 310, где проверяется наличие условий для входа в фазу свободного качения. В случае наличия системы FRIN, данные условия представляют собой переключение трансмиссии 3 в нейтральное положение, причем транспортное средство 1 еще продолжает двигаться. Также одним из условий может быть необходимость нахождения значения скорости транспортного средства 1 в заранее установленных пределах. При несоблюдении условий способ продолжается возвратом к этапам 305 и 310, пока не будут выполнены входные условия, в таком случае способ продолжается выполнением этапа 312, когда двигатель 2 остановлен, а транспортное средство 1 входит в фазу свободного качения.
Далее процесс переходит к выполнению этапа 315, где проверяются условия для выхода из фазы свободного качения, которые, в случае наличия системы FRIN, включают в себя расцепление муфты сцепления 10 и включение передачи или, при наличии системы, использующей систему прогнозирования передачи, пока не будет осуществлено уведомление о том, что передача должна быть включена.
Если данные условия не выполнены, двигатель 2 остается выключенным, транспортное средство 1 остается в фазе свободного качения, а процесс возвращается к выполнению этапов 312 и 315 и выполняет их до тех пор, пока не будут выполнены условия для выхода из фазы свободного качения.
Когда условия на этапе 315 будут выполнены, способ переходит к этапу 318, где передача, включенная для выхода или спрогнозированная передача (в случае использования системы прогнозирования передачи) определена, и двигатель 2 запущен. Следует отметить, что запуск двигателя может представлять собой отдельный этап, выполняемый после или одновременно с этапом определения передачи для выхода.
Далее способ переходит к этапу 320, где определяется требуемая частота вращения двигателя во время выхода из фазы свободного качения. Данная величина может быть получена при проведении прямых измерений частоты вращения ведущего вала 3i трансмиссии 3 при помощи датчика, либо посредством расчетов, основанных на включенной или спрогнозированной передаче.
Как только требуемая частота вращения двигателя становится известной, процесс переходит к выполнению этапа 325, где частота вращения двигателя 2 настраивается блоком 6 управления двигателем таким образом, чтобы она соответствовала требуемым показателям частоты вращения двигателя.
Далее способ переходит к этапу 328, где определяется, произошло ли зацепление муфты сцепления 10. Если зацепления муфты сцепления не произошло, процесс возвращается к этапу 320 через этап 329, а этапы 320, 325 и 328 выполняются повторно, если скорость транспортного средства выше предварительно определенной минимальной скорости (Vmin), близкой к нулевому значению. Если же скорость транспортного средства ниже его минимальной скорости (Vmin), данный факт фиксируется на этапе 329, процесс завершается выполнением этапа 360.
Если на этапе 328 определено, что муфта сцепления была включена, выход из фазы свободного качения завершается, процесс переходит к выполнению этапа 330 для проверки, произошло ли выключение зажигания.
Если зажигание не было выключено, способ возвращается от этапа 330 назад к этапу 305, но, если зажигание было выключено, то способ переходит от этапа 330 к этапу 350, где он и завершается.
Если скорость моторного транспортного средства 1 является постоянной в течение промежутка времени между включением передачи и включением муфты сцепления, то точная настройка частоты вращения двигателя не потребуется. Однако если скорость транспортного средства 1 изменялась, способ, возвращаясь из этапа 328 к этапу 320, гарантирует, что изменения скорости транспортного средства будут учтены во время определения требуемой частоты вращения двигателя, а процесс ее точной настройки продлится до включения водителем муфты сцепления 10.
Далее способ будет описан со ссылкой на Фиг.12 в отношении системы FRIG, в которой свободное качение происходит при включенной передаче.
Способ начинается с выполнения этапа 300 с запуска зажигания, затем переходит на этап 305, на котором двигатель 2 запущен, а транспортное средство функционирует в обычном режиме.
Далее процесс переходит этапу 310, на котором проверяется наличие условий для входа в фазу свободного качения. В случае системы FRIG, данные условия представляют собой отсутствие запроса на подачу крутящего момента от двигателя 2 и автоматическое выключение муфты сцепления 10, пока моторное транспортное средство 1 еще движется. Другими словами, педаль сцепления нажата, а педаль газа не нажата. К условиям может также относиться нахождение скорости транспортного средства в предварительно установленных пределах. Если данные условия не выполняются, то этапы 305 и 310 циклически выполняются до тех пор, пока условия входа не будут выполнены. После этого процесс переходит к выполнению этапа 312, где происходит выключение двигателя 2, транспортное средство 1 входит в фазу свободного качения. После этого способ переходит к этапу 315, где происходит проверка наличия условий для выхода из фазы свободного качения, которые в случае системы FRIG включают в себя запрос на подачу крутящего момента, то есть нажатие педали акселератора водителем транспортного средства 1.
Если данные условия не выполнены, двигатель 2 остается выключенным, моторное транспортное средство 1 остается в фазе свободного качения, процесс возвращается к выполнению этапа 312. Этапы 312 и 315 циклически выполняются до тех пор, пока не будут выполнены условия для выхода из фазы свободного качения.
Когда условия на этапе 315 выполнены, процесс переходит к этапу 318, на котором устанавливается передача для выхода из данной фазы. В большинстве случаев это будет та же передача, с которой транспортное средство вошло в фазу свободного качения, но водитель может выбрать другую передачу во время свободного качения или во время выхода из этой фазы. Передача, выбранная для выхода из фазы свободного качения, устанавливается либо системой определения выбранной передачи, либо при наличии системы прогнозирования передачи она устанавливается во время выхода из фазы свободного качения, после чего двигатель 2 запускается. Следует отметить, что запуск двигателя 2 может осуществляться в виде отдельного этапа, выполняемого после или одновременно с этапом определения передачи для выхода из фазы свободного качения.
Затем способ переходит к этапу 320, где определяется требуемая частота вращения двигателя во время выхода из фазы свободного качения. Как и ранее, данная величина может быть получена при проведении прямых измерений частоты вращения ведущего вала 3i трансмиссии 3 при помощи датчика, либо посредством вычислений, основанных на включенной или прогнозируемой передачи.
Как только требуемая частота вращения двигателя становится известной, способ переходит к этапу 325, где частота вращения регулируется блоком 6 управления двигателем для соответствия требуемым показателям частоты вращения двигателя.
Далее способ переходит к этапу 328, где определяется, произошло ли включение муфты сцепления 10. Если муфта сцепления не была включена, способ возвращается к выполнению этапа 320 через блок 329, а блоки 320, 325 и 328 выполняются повторно, если скорость транспортного средства выше предварительно определенной минимальной скорости (Vmin), близкой к нулевому значению. Если же скорость транспортного средства ниже его минимальной скорости (Vmin), данный факт детектируют на этапе 329, способ завершается выполнением этапа 360.
Если на этапе 328 определено, что муфта сцепления зацеплена, выход из фазы свободного качения завершается, способ переходит к выполнению этапа 330 для проверки, выключено ли зажигание.
Если зажигание не было выключено, способ возвращается от этапа 330 к этапу 305, а если оно было выключено, то способ переходит от этапа 330 к выполнению этапа 350, где он и завершается.
Если скорость моторного транспортного средства 1 является постоянной в течение промежутка времени между включением передачи и включением муфты сцепления, то точная настройка частоты вращения двигателя не требуется. Однако если скорость транспортного средства 1 изменялась, способ, возвращаясь от этапа 328 к этапу 320, гарантирует, что изменения скорости транспортного средства будут учтены во время определения требуемой частоты вращения двигателя, а процесс ее точной настройки продлится до включения водителем муфты сцепления 10.
Следует отметить, что два описанных выше варианта воплощения способа управления транспортным средством во время выхода из фазы свободного качения, предоставлены в качестве примера, изобретение не ограничивается только данными этапами или порядком их выполнения.
Следует также отметить, что если во время любой фазы движения транспортного средства ключ зажигания перемещен в положение выключения, выполнение процесса завершается на этапе 350.
Кроме того, система способна отслеживать скорость транспортного средства во время фазы свободного качения и постоянно информировать водителя о выходе из данной фазы посредством отображения предлагаемых передач для выхода из этапа свободного качения.
Обобщая вышесказанное, представленное изобретение включает в себя регулирование частоты вращения двигателя для установления соответствия со скоростью ведущего вала трансмиссии после включения двигателя, но до включения муфты сцепления. За счет устранения или сведения к минимуму несоответствия скоростей, исключаются колебания крутящего момента, то есть произойдет плавная подача крутящего момента привода. Определение скорости вращения ведущего вала требует либо прямых измерений, либо вычислений, основанных на скорости транспортного средства, и информации о выбранной передаче. Выбранная передача определяется либо системой переключения передач, либо системой прогнозирования передачи, каждая из которых может определять измерением положения и вращения поворотного переключателя или вала переключателя, образующих часть механизма переключения передач Н-типа.
Несмотря на то, что изобретение успешно применяется для автомобилей с механической коробкой передач, имеющих механизм переключения передач Н-типа, оно также может использоваться в транспортных средствах с механической трансмиссией других типов переключения, или для транспортных средствах с автоматической трансмиссией, например, с двойным сцеплением (первое сцепление для нечетных передач, второе - для четных). В данном случае, основным будет сцепление, выбранное для выхода их фазы свободного качения.
Термин «система определения выбранной передачи» означает систему, в которой используется датчик для определения включенной передачи либо посредством определения положения элементов трансмиссии или элементов механизма переключения передач, используемых для переключения передачи. Также данная система посылает сигналы в электронный блок, который обрабатывает сигнал или сигналы от датчика, чтобы таким образом обеспечивать индикацию включенной передачи. Другими словами, система датчиков выбранной передачи включает в себя: датчик 7 выбранной передачи и модуль 5 состояния трансмиссии, как показано на Фиг.1А, или матрицу датчиков (см. Фиг.8D) и блок 5 состояния трансмиссии.
Термин «система прогнозирования передачи» означает систему, в которой используется датчик для определения положения элементов внутри трансмиссии или элементов механизма переключения передач, используемых для переключения передачи. Она также посылает сигналы в электронный блок. В данном блоке сигнал или сигналы от датчика обрабатываются, чтобы таким образом обеспечивать индикацию следующей передачи, которая будет включена. Таким образом, система прогнозирования передачи может включать в себя систему определения выбранной передачи с дополнительными контрольными точками, при прохождении через которые формируются данные, которые могут обрабатываться блоком управления трансмиссией для индикации включаемой передачи.
Специалистам в данной области техники будет понятно, что, несмотря на то, что изобретение было описано посредством примера со ссылкой на один или более предпочтительные варианты осуществления, оно не ограничивается ими, и возможно осуществление одного или более изменений изложенных вариантов осуществления изобретения без отступления от сущности изобретения, представленной в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА УЛУЧШЕНИЯ КАЧЕСТВА ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2012 |
|
RU2629624C2 |
| СИСТЕМА ПРЕДВАРИТЕЛЬНОГО ОПРЕДЕЛЕНИЯ ПЕРЕДАЧИ ДЛЯ МЕХАНИЧЕСКОЙ ТРАНСМИССИИ | 2012 |
|
RU2602869C2 |
| СПОСОБ КАЛИБРОВКИ ДАТЧИКА ВЫБРАННОЙ ПЕРЕДАЧИ И СИСТЕМА ДАТЧИКОВ ВЫБРАННОЙ ПЕРЕДАЧИ | 2012 |
|
RU2588699C9 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ВКЛЮЧЕНИЕМ СЦЕПЛЕНИЯ | 2012 |
|
RU2599860C2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧИ АВТОМАТИЗИРОВАННОЙ КОРОБКИ ПЕРЕДАЧ | 2007 |
|
RU2457127C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2017 |
|
RU2723009C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2126332C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2648504C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЛИНЕЙНОГО СОЛЕНОИДА | 2019 |
|
RU2719336C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2077997C1 |
При управлении транспортным средством, определяют, выполнено ли условие для выхода из фазы свободного качения. Если условие выполнено, осуществляют запуск двигателя и устанавливают частоту вращения двигателя на необходимое значение, определенное на основании скорости вращения ведущего вала трансмиссии. Предложены также система управления транспортным средством и транспортное средство. Достигается плавный выход машины из фазы свободного качения. 3 н. и 16 з.п. ф-лы, 12 ил., 2 табл.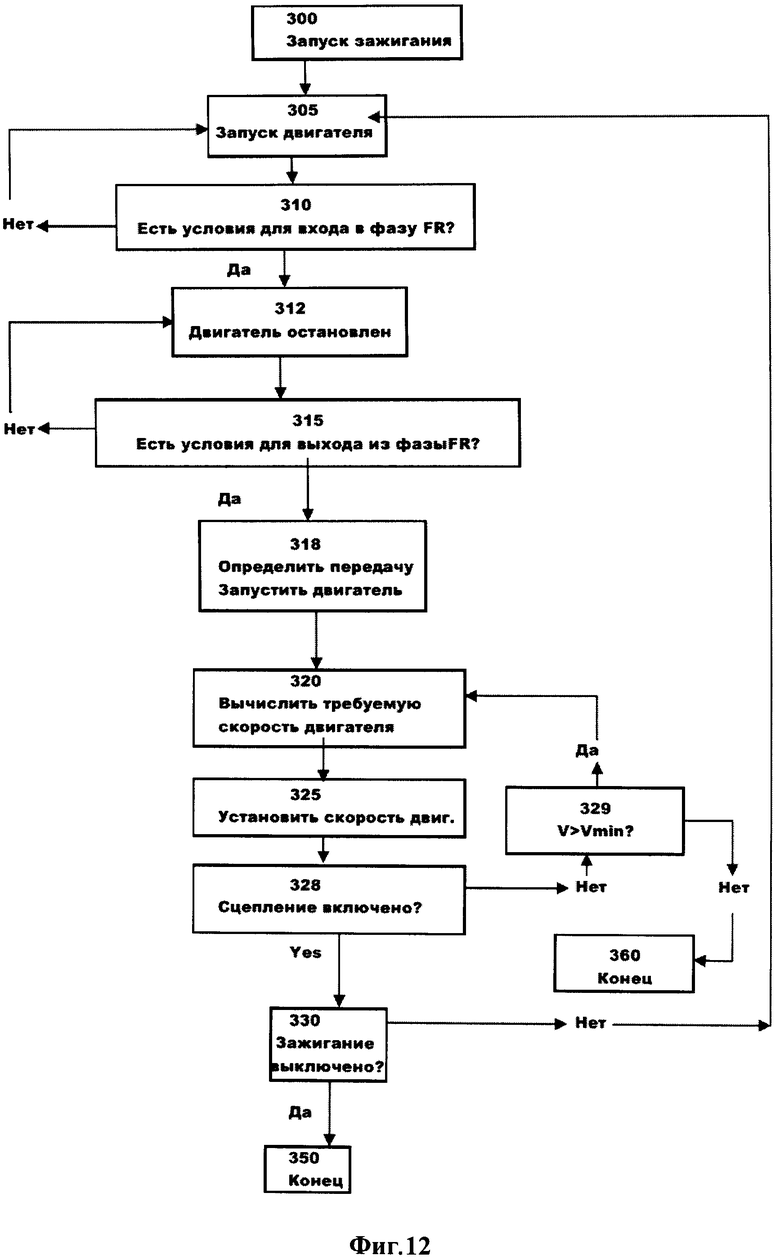
1. Способ управления моторным транспортным средством, имеющим двигатель, который приводит в действие трансмиссию через муфту сцепления во время выхода из фазы свободного качения, в котором определяют, выполнено ли по меньшей мере одно условие для выхода из фазы свободного качения, и, если по меньшей мере одно условие выполнено, осуществляют запуск двигателя и устанавливают частоту вращения двигателя на необходимое значение, определенное на основании скорости вращения ведущего вала трансмиссии.
2. Способ по п.1, в котором дополнительно определяют скорость ведущего вала трансмиссии и регулируют частоту вращения двигателя таким образом, чтобы она соответствовала частоте вращения ведущего вала трансмиссии.
3. Способ по п.2, в котором скорость ведущего вала трансмиссии определяют посредством измерения скорости ведущего вала трансмиссии.
4. Способ по п.2, в котором скорость ведущего вала трансмиссии определяют путем вычисления, выполняемого на основании текущей скорости транспортного средства.
5. Способ по п.4, в котором вычисление скорости ведущего вала трансмиссии осуществляют с использованием передаточного числа трансмиссии, выбранного для выхода из фазы свободного качения, в сочетании с текущей скоростью транспортного средства и суммарным передаточным числом конечной передачи.
6. Способ по п.5, в котором для определения передаточного числа, выбранного для выхода из фазы свободного качения, используют систему определения выбранной передачи, а определенное передаточное число используют для вычисления скорости ведущего вала трансмиссии.
7. Способ по п.5, в котором для прогнозирования передачи, которая будет включена следующей, используют систему прогнозирования передачи, а передаточное число спрогнозированной передачи используют для вычисления скорости ведущего вала трансмиссии.
8. Способ по п.7, в котором для определения фактического передаточного числа, выбранного для выхода из фазы свободного качения, используют систему прогнозирования передачи, и полученное фактическое передаточное число используют для вычисления скорости ведущего вала трансмиссии.
9. Способ по любому из пп.1-8, в котором во время фазы свободного качения муфта сцепления включена, трансмиссия находится в нейтральном положении, а по меньшей мере одним условием для выхода из фазы свободного качения является включение передачи переднего хода.
10. Способ по любому из пп.1-6, в котором во время фазы свободного качения муфта сцепления выключена, трансмиссия находится в положении включенной передачи, а по меньшей мере одним условием для выхода из фазы свободного качения является запрос на подачу крутящего момента от двигателя.
11. Система управления транспортным средством, имеющим двигатель, который приводит в действие трансмиссию через муфту сцепления во время выхода из фазы свободного качения, причем система содержит контроллер, выполненный с возможностью определять, выполнено ли по меньшей мере одно условие для выхода из фазы свободного качения, и, если по меньшей мере одно условие выполнено, осуществлять запуск двигателя и устанавливать частоту вращения двигателя на значение требуемой частоты вращения двигателя на основании скорости ведущего вала трансмиссии.
12. Система по п.11, которая дополнительно содержит датчик для измерения скорости ведущего вала трансмиссии, а требуемая частота вращения двигателя представляет собой частоту, соответствующую скорости ведущего вала трансмиссии.
13. Система по п.11, в которой контроллер выполнен с возможностью использовать для вычисления скорости ведущего вала трансмиссии передаточное число передачи, выбранной для выхода из фазы свободного качения, в сочетании с текущей скоростью транспортного средства и суммарным передаточным числом конечной передачи, а требуемая частота вращения двигателя представляет собой частоту, соответствующую вычисленной скорости ведущего вала трансмиссии.
14. Система по п.13, в которой трансмиссия представляет собой механическую трансмиссию, и которая дополнительно содержит систему определения выбранной передачи для определения передаточного числа, выбранного для выхода из фазы свободного качения.
15. Система по п.13, в которой трансмиссия представляет собой механическую трансмиссию, и которая дополнительно содержит систему прогнозирования передачи для прогнозирования передачи, которая будет включена следующей, а контроллер выполнен с возможностью использовать передаточное число спрогнозированной передачи для вычисления скорости ведущего вала трансмиссии.
16. Система по п.15, в которой систему прогнозирования передачи дополнительно используют для определения фактического передаточного числа, выбранного для выхода из фазы свободного качения, которое используется контроллером для вычисления скорости ведущего вала трансмиссии.
17. Система по любому из пп.11-16, в которой во время фазы свободного качения трансмиссия находится в нейтральном положении, а определение выполнения по меньшей мере одного условия для выхода из фазы свободного качения включает в себя определение, включена ли передача переднего хода трансмиссии.
18. Система по любому из пп.11-16, в которой во время фазы свободного качения муфта сцепления выключена, трансмиссия находится в положении включенной передачи, а по меньшей мере одним условием для выхода из фазы свободного качения является детектирование наличия запроса на подачу крутящего момента от двигателя.
19. Моторное транспортное средство, содержащее систему по любому из пп.11-18.
| Устройство для проверки наличия бегущего магнитного поля и короткозамкнутых витков в индукторах линейных электродвигателей | 1983 |
|
SU1100690A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| US20110015037A1, 20.01.2011. | |||

