Изобретение относится к конструкциям суден, внутреннему устройству корпусов, двигателей и размещению грузов, а также к сфере гидроволновой энергетики, в частности - к электрогенераторам, элементам их конструкций, корпусов и опор; к устройствам для регулирования механической энергии, конструктивно сопряженным с электрическими машинами.
Известны генераторы для превращения энергии поверхностных волн воды в электрическую энергию, самым простым из них является Генератор электрического тока и его варианты (см. патент на изобретение Российской Федерации МПК Н02К 19/00 №2396673, Генератор электрического тока, его варианты и способы их установки. Заявка №2009100832/09 от 12.01.09. Авт. изобр. Настасенко В.А. // БИ №22 от 10.08.10.). Генератор содержит ротор и статор с общей продольной осью, расположенной горизонтально, у которого сердечники с катушками и системой возбуждения обеспечивают выработку электрического тока, при этом центры масс ротора или статора выполнены эксцентрично смещенным относительно продольной оси их вращения, а для обеспечения возможности качания статически неуравновешенных роторов или статоров, они свободно установлены, а парные им роторы или статоры жестко закреплены в плавающем средстве, имеющем возможность колебаний на угол ±α при движении волн на воде и возможность разворота по нормали к действию волн, за счет формы своего корпуса или вертикального оперения. При этом генераторы могут быть установлены фронтальными рядами, или рядами друг за другом, а для восприятия колебаний плавающих средств во взаимно перпендикулярных направлениях, генераторы могут быть встроены перпендикулярно в полый трубчатый ротор внешнего генератора, у которого ротор или статор выполнены статически неуравновешенными, и за счет их свободного подвеса в направлении к центру Земли, они имеют возможность, совершать колебания относительно закрепленных на плавающем средстве парных им роторов и статоров, при действии на него волн, в т.ч. в трех взаимно перпендикулярных плоскостях, для чего роторы или статоры могут быть закреплены в одни или более ярусов, на горизонтальной поворотной платформе, установленной на плавающем средстве и имеющей возможность свободного поворота вокруг своей вертикальной оси, а на самой поворотной платформе и прилегающих к ней поверхностей плавающего средства, могут быть установлены сердечники с катушками и системой возбуждения, которые обеспечивают выработку электрического тока. Роторы или статоры также могут быть подвешены к горизонтальной платформе, в т.ч. в несколько ярусов. При этом индуктируемая электрогенераторами электродвижущая сила пропорциональна скорости изменения магнитного потока (см. книгу: Вершинский Н.В. Энергия океана - М.: Наука, 1986. с. 31).
Недостатком данных генераторов является малая сила, движущая его ротор или статор только за счет эксцентриситета их масс, который в данных конструкциях является незначительным, а также малый сектор (α=±15°) и скорость колебаний ротора относительно статора, что снижает его мощность.
Известно также устройство для использования энергии качки судна, содержащее перемещающийся относительно его корпуса груз, кинематически связанный с рабочим валом, на котором закреплены маховик и потребитель энергии, у которого с целью повышения эффективности его работы путем увеличения количества энергии, используемой потребителем, груз снабжен колесами с ребордами, посредством которых он подвижно сопряжен с рельсовыми путями, которыми снабжен корпус судна, причем эти пути изогнуты в плоскости шпангоута и диаметральной плоскости по дуге окружности, а вышеуказанная кинематическая связь груза с рабочим валом содержит зубчатый сектор, закрепленный на грузе, а две обгонные муфты, закрепленные на рабочем валу, при этом одна - непосредственно, а другая - через паразитную шестерню, выполнены с зацеплением с упомянутым зубчатым сектором (см. А.с. СРСР №1152882 A, МПК B63H 19/02 Устройство для использования энергии качки судна. Заявка №3604422/27-11 от 03.05.85. Авт. изобр. Д.Н. Николаев. Опубл. БИ №16 от 30.04.85). Недостатками данного устройства являются:
1. Ограничение по количеству подвижных трюм-грузов (или емкостей для грузов) - один и по его размещению - в объеме одного отсека корпуса.
2. Размещение груза лишь в плоскости шпангоута (поперек) корпуса судна, что не позволяет восприятия им осевого и других направлений качки волнами и ветром, которые более благоприятные для судна при большой высоте волн.
3. Подвешивание груза на оси, гнезда которой подвергаются большим нагрузкам при ударах волн.
4. Использование дуговых направляющих, в т.ч. рельсового типа для движения трюм-груза.
5. Использование колес для движения трюм-груза по направляющим.
6. Использование трюм-грузов сложной формы.
7. Размещение центра колебаний наверху подвижного трюм-груза, в результате чего высота h подъема центра его массы (1), которая формирует энергетический потенциал системы, зависит от величины радиуса r к центру массы и угла ±α колебаний корпуса судна волнами, а при безопасных для бортовой качки углах α±15°, высота составляет незначительную величину: h<3,5% от радиуса r:

8. Наличие нерабочего времени действия системы на этапе ее раскачки.
9. Сложная система раскачивания с использованием пускоразгонных средств и системы для обеспечения постоянного направления ее действия.
10. Одинаковые размеры начальных диаметров шестерен не позволяют изменить передаточное отношение от зубчатого сектора к рабочему валу при разной частоте и скорости качания грузов, в зависимости от волнения моря.
11. Узкое ограничение эффективности снятия мощностей при широком диапазоне параметров и энергии волн.
12. Амортизирующие упоры установленные сверху, что увеличивает деформации отсека корпуса судна.
13. Использование зубчатых секторов больших размеров и сложность их монтажа для зубчатых зацеплений на разных несвязанных между собой опорных поверхностях и устройствах.
14. Высокая вероятность поломок зубьев зубчатых передач при ударах волн по корпусу судна.
Устранение указанных недостатков является задачей данной заявки на изобретение. Ее решение возможно путем создания судна, использующего энергию качки его корпуса волнами и ветром, относительно размещенных в его отсеках качающихся трюм-грузов, кинематически связанных с роторами электрогенераторов, при этом трюм-грузы выполнены в виде секторов или сегментов цилиндра с дуговым основанием и имеют возможность дугового перемещения в его корпусе, за счет свободной установки вдоль или поперек оси корпуса судна своими боковыми цилиндрическими поверхностями на параллельные их основанию опорные ролики, что обеспечивает устойчивую ориентацию трюм-грузов к центру Земли в вертикальной плоскости и их свободный поворот по дуге основания при качке корпуса, а с роторами и статорами электрогенераторов кинематически связаны опорные ролики, для равномерного распределения окружных сил в точках контакта трюм-грузов и опорных роликов при их начальном и возвратном качении, эти ролики расположены радиально к дуге сектора по обе стороны его цилиндрического основания под углом 45°±10°, а для одновременного восприятия поперечной и осевой качки корпуса судна, трюм-грузы и их боковые опорные ролики имеют осевую установку, а опоры этих роликов установлены на поперечные опорные платформы, с закрепленными параллельно оси корпуса боковыми дуговыми опорами, которыми они установлены, с возможностью устойчивой ориентации к центру Земли и свободного их качения за счет собственного веса и веса размещенных на них трюм-грузов, на дополнительные пары поперечных боковых опорных роликов, кинематически связанных со своими электрогенераторами, а для ограничения сектора дугового движения трюм-грузов в отсеке корпуса при качке его волнами и/или ветром, на основаниях и на верхних частях отсеков корпуса установлены пружинные демпферы и/или гидравлические, и/или пневматические подушки, которые введены в контакт с закрепленными на поверхностях трюм-грузов упорами, а опорные ролики введены с возможностью свободного дугового движения осевыми шипами-выступами, выполненными на их торцах, и/или внешними цилиндрическими поверхностями и торцами этих роликов, в половинки опорных подшипников скольжения, или опорные ролики установлены с опорой на пары опорных стержней с контактом их внешних цилиндрических поверхностей, а для устранения нагрузок в средней части опорных роликов, диаметры их средней части, и/или радиусы средней части цилиндрических оснований трюм-грузов, выполнены уменьшенными, а для смягчения ударов от действия волн, на боковых и торцовых поверхностях контактирующих с опорными роликами трюм-грузов, и/или на поверхностях опорных роликов, нанесен слой упругого материала, при этом опорные ролики и кинематически связанные с ними электрогенераторы установлены на опорных платформах, демпфированных от остова и бортов корпуса судна пружинами, и/или рессорами, и/или гидравлическими и/или воздушными подушками, и/или их комбинациями, а для исключения продольного сдвига трюм-груза и выхода его основания за поверхности опорных роликов при резких ударах волн, на обоих торцах этих роликов выполнены реборды или закреплены фланцы, а кинематическая связь вала ротора электрогенератора с опорным роликом выполнена через соединительную муфту, связанную с осями их вращения, а для исключения реверса вала ротора электрогенератора, между ним и осью опорного ролика установлено обгонное реверсивное устройство, на входном валу которого установлено зубчатое колесо, а на выходном валу установлены друг за другом две обгонные муфты с наружными зубчатыми венцами или связанные со своими шестернями, из которых одна введена в зацепление с упомянутым зубчатым колесом на первой половине ширины его венца непосредственно, а вторая - через зацепление с первой половиной ширины зубчатого венца паразитной шестерни, которая второй половиной ширины своего зубчатого венца введена в зацепление со второй половиной ширины зубчатого венца упомянутого зубчатого колеса, а для увеличения частоты вращения вала ротора электрогенератора, с ним связан мультипликатор, а для регулировки частоты вращения вала ротора - с ними связано регулирующее устройство, содержащее вариатор, состоящий из жестко закрепленных на параллельных полуосях дисков, обращенных друг к другу торцами, или вершинами конусов, у которых параллельные друг другу торцовые или боковые конические поверхности кинематически связаны между собой фрикционным роликом с конической или дуговой наружной поверхностью, для чего ролик установлен на оси между обращенных друг к другу поверхностей дисков или конусов, с возможностью свободного вращения и принудительного сдвига его по этой оси с помощью вилки с резьбовым отверстием, в которое веден ходовой винт с приводом от шагового электродвигателя, а для уменьшения габаритов занимаемого пространства, опорные ролики выполнены полыми, а внутрь их введены и закреплены статоры электрогенераторов, при этом концы валов их роторов неподвижно связаны с опорной платформой для установки опорных роликов, или для увеличения частоты вращения ротора электрогенератора, на торце по периферии опорного ролика или по периферии статора закреплен зубчатый венец с внутренними зубьями, а на конце вала ротора закреплена шестерня, между которыми в зацепление введено паразитное зубчатое колесо, связанное осью, имеющей возможность ее вращения, с опорной платформой, а для исключения реверса вращения ротора электрогенератора, с паразитным зубчатым колесом введены в зацепление закрепленные друг за другом на валу ротора электрогенератора две обгонные муфты, связанные с шестернями, одна из которых контактирует с указанным зубчатым колесом напрямую, а другая - через паразитную шестерню, а для увеличения частоты вращения валов роторов, на торце по периферии статора или по периферии на торце опорного ролика закреплен зубчатый венец с внутренними зубьями, с которым введено в зацепление планетарное зубчатое колесо, установленное с возможностью свободного вращения на водиле, имеющем индивидуальный привод с вращением от шагового электродвигателя, закрепленного на стойке, связанной с опорной платформой, а с этим планетарным зубчатым колесом введена в зацепление закрепленная на конце вала ротора шестерня, которая является солнечной для зубчатого колеса, установленного на водиле, а для регулировки частоты вращения вала ротора, привод водила выполнен из электродвигателя постоянного тока, или переменного тока с вариатором и управляющего устройства с датчиками угла поворота опорного ролика., а для увеличения частоты вращения роторов электрогенераторов, с планетарным зубчатым колесом в блоке выполнено второе зубчатое колесо, введенное в зацепление с закрепленной на валу ротора шестерней, которая является солнечной шестерней мультипликатора, а для исключения реверса ротора, зубчатое колесо с внутренним зубчатым венцом первой половиной ширины своего зубчатого венца введено в зацепление с одной из двух обгонных муфт с зубчатыми венцами, связанных с осью планетарного блока, а второй половиной ширины своего венца - с первой половиной ширины венца паразитной шестерни, которая второй половиной ширины своего венца введена в зацепление с зубчатым венцом второй обгонной муфты, а зубчатые венцы этих муфт, адекватны зубчатому венцу меньшего колесу планетарного блока, полая ось которого установлена с возможностью свободного вращения на полуоси, связанной Г-образной или Т-образной боковой планкой с осью паразитной шестерни и полуосью водила, а для исключения возможности продольного сдвига груза и выхода его радиусной поверхности из контакта с поверхностью опорных роликов при резких ударах волн, у обоих торцов этой поверхности выполнены конические фаски, имеющие радиусы кривизны в вертикальной плоскости Rmax и Rmin, а с ними в контакт введены конические опорные ролики шириной b, меньший диаметр Dmin которых введен в контакт с радиусом Rmin, а больший диаметр Dmax - с радиусом Rmax, при соотношении этих диаметров Dmax:Dmin=2(Rmax:Rmin), а также с наклоном их оси на угол β равным величине  , а для регулировки частоты вращения роторов электрогенераторов, вдоль оси на торцах опорных роликов, повернутых к среднему поперечному сечению груза, выполнены конические хвостовики, диаметрами dmax, dmin и длиной l которых создан наклон боковой поверхности конуса параллельный опорной платформе, а с конусами введены в контакт фрикционные ролики, которые размещены с возможностью свободного вращения в вилках и введены в зацепление со шлицевыми валами, параллельными опорной платформе, а для продольного движения фрикционного ролика по шлицевому валу, в вилке выполнено резьбовое отверстие, в которое введен параллельный шлицевому валу ходовой винт с индивидуальным приводом, а шлицевый вал связан соединительной муфтой с ротором электрогенератора напрямую, или через устройство для исключения реверса его вращения, содержащее ведущее зубчатое колесо, с которым введены в зацепление две обгонные муфты, закрепленные друг за другом на выходном валу, одна из которых напрямую контактирует с указанным зубчатым колесом, а другая - через паразитную шестерню, а для увеличения частоты вращения роторов электрогенераторов, их оси связаны с мультипликаторами, а для уменьшении габаритов системы, внутри вдоль оси опорных роликов, выполнено коническое отверстие, диаметрами dmax, dmin и длиной l которого создан наклон боковой поверхности конуса параллельный опорной платформе, а с этим конусом введен в контакт фрикционный ролик и другие элементы системы, аналогичные выполненным для наружного конуса устройствам для исключения реверса вращения ротора электрогенератора и мультипликаторам для увеличения его частоты, при этом, для повышения устойчивости положения трюм-грузов при сильных ударах волн, со стороны их торцов выполнены предохранительные опорные пояса и/или стойки.
, а для регулировки частоты вращения роторов электрогенераторов, вдоль оси на торцах опорных роликов, повернутых к среднему поперечному сечению груза, выполнены конические хвостовики, диаметрами dmax, dmin и длиной l которых создан наклон боковой поверхности конуса параллельный опорной платформе, а с конусами введены в контакт фрикционные ролики, которые размещены с возможностью свободного вращения в вилках и введены в зацепление со шлицевыми валами, параллельными опорной платформе, а для продольного движения фрикционного ролика по шлицевому валу, в вилке выполнено резьбовое отверстие, в которое введен параллельный шлицевому валу ходовой винт с индивидуальным приводом, а шлицевый вал связан соединительной муфтой с ротором электрогенератора напрямую, или через устройство для исключения реверса его вращения, содержащее ведущее зубчатое колесо, с которым введены в зацепление две обгонные муфты, закрепленные друг за другом на выходном валу, одна из которых напрямую контактирует с указанным зубчатым колесом, а другая - через паразитную шестерню, а для увеличения частоты вращения роторов электрогенераторов, их оси связаны с мультипликаторами, а для уменьшении габаритов системы, внутри вдоль оси опорных роликов, выполнено коническое отверстие, диаметрами dmax, dmin и длиной l которого создан наклон боковой поверхности конуса параллельный опорной платформе, а с этим конусом введен в контакт фрикционный ролик и другие элементы системы, аналогичные выполненным для наружного конуса устройствам для исключения реверса вращения ротора электрогенератора и мультипликаторам для увеличения его частоты, при этом, для повышения устойчивости положения трюм-грузов при сильных ударах волн, со стороны их торцов выполнены предохранительные опорные пояса и/или стойки.
Таким образом, устраняются все перечисленные недостатки базовой конструкции судна с гидроволновой энергетической установкой.
Предлагаемые суда с гидроволновыми двигательными установками и различные варианты их исполнения показаны на чертежах.
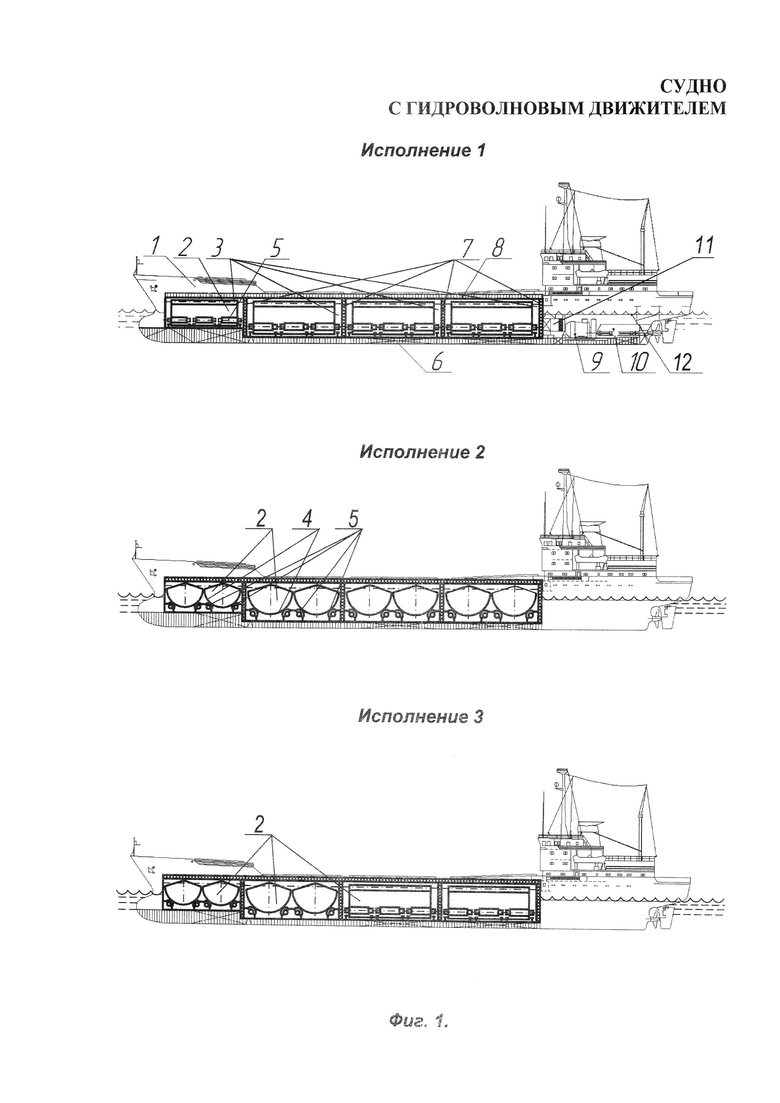
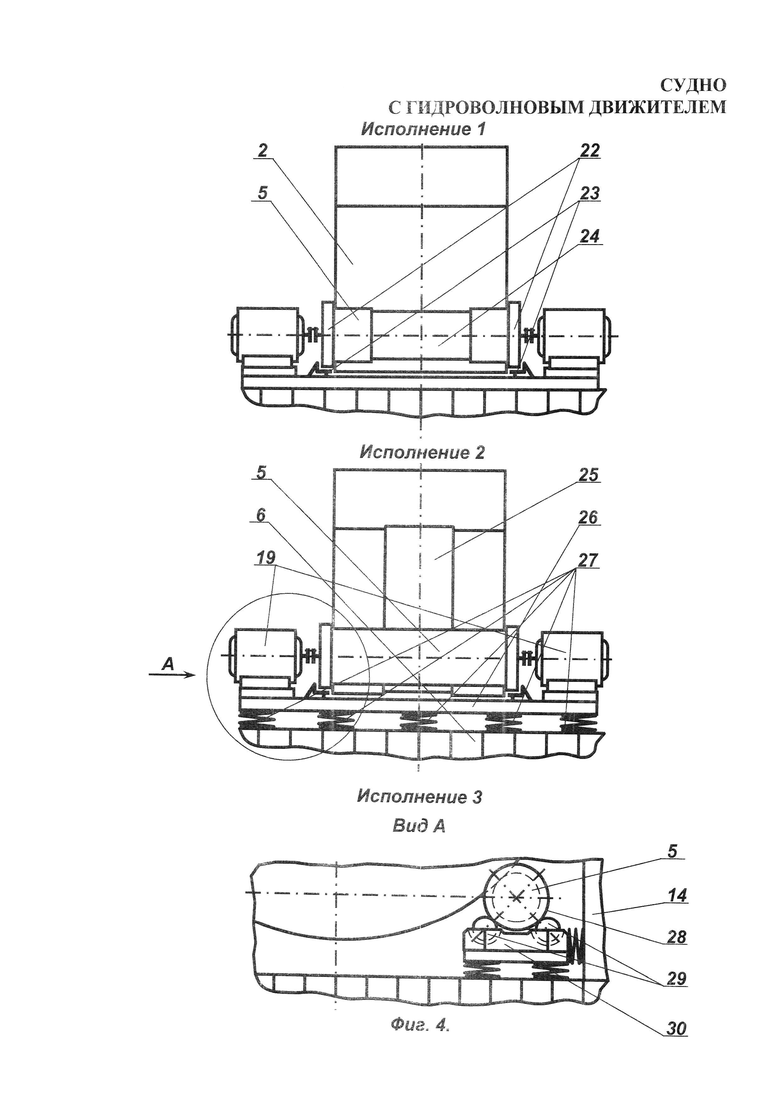
На фиг. 1 показан общий вид судна, состоящего из корпуса 1, в котором секторы для размещения грузов (далее трюм-грузы) 2 установлены в отсеках 3 вдоль (исполнение 1), или поперек оси его корпуса (исполнение 2), или в сочетании продольной и поперечной установок (исполнение 3), Трюм-грузы имеют цилиндрические основания 4, которыми они свободно установлены на поворотные опорные ролики 5, размещенные на днищевой секции 6, а отсеки в корпусе разделены поперечными перегородками 7 и накрыты палубными крышками 8, обеспечивающими корпусу судна необходимую прочность, жесткость и герметичность, а также возможность размещения на палубе дополнительных грузов. При этом продольная установка оси трюм-грузов обеспечивает восприятие ими бортовой или поперечной качки корпуса судна, а поперечная - осевой или килевой. Для обеспечения хода, судно снабжено ходовым электродвигателем 9, с приводом 10 ходового винта и устройствами 11 для накопления электрической энергии (например, аккумуляторами и/или конденсаторами), и подачи ее от них на ходовой электродвигатель с частотой f его работы, в период отсутствия качки корпуса судна волнами. Глубина его погружения в воду ограничена ватерлинией 12.
Установка трюм-грузов их цилиндрической поверхностью на опорные ролики обеспечивает им устойчивую вертикальную ориентацию к центру Земли и их свободное дуговое движение по поверхности опорных роликов при любой силе качки корпуса судна волнами и ветром.
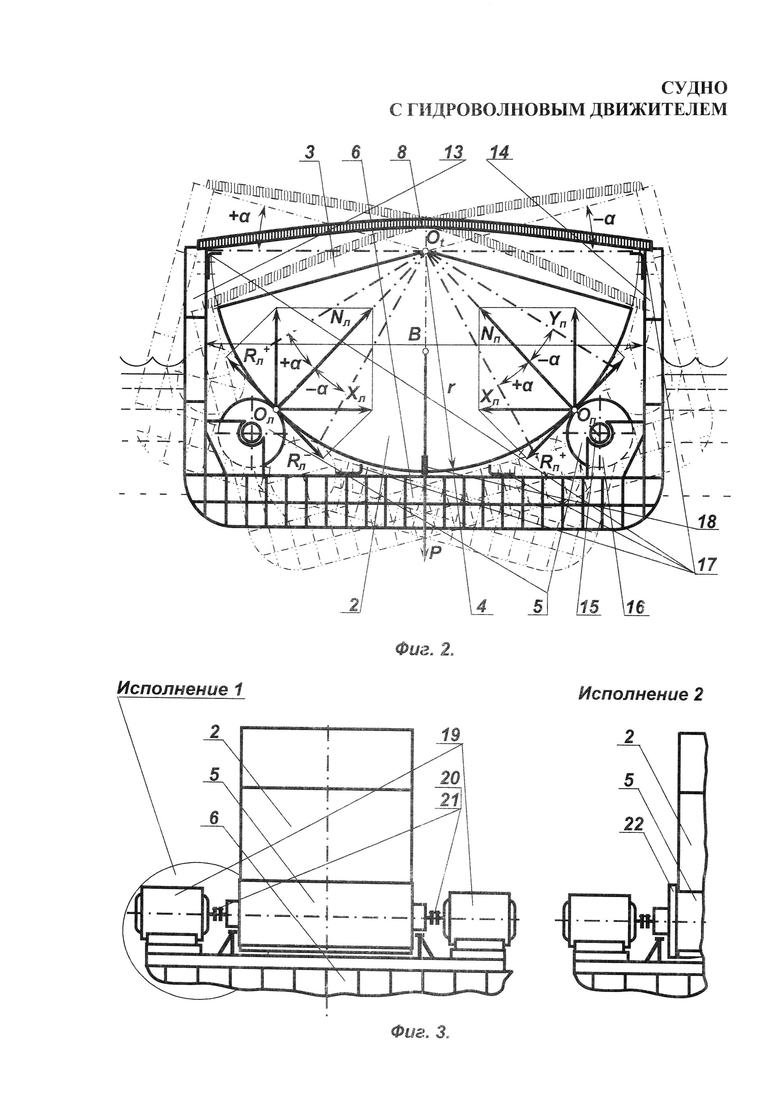
На фиг. 2. показана схема положений корпуса судна в поперечном сечении отсеков 3 шириной B, с днищевой секцией 6, крышкой 8, левым 13 и правым 14 бортами, при качке корпуса волнами и ветром на угол ±α. При этом трюм-груз 2, выполненный в виде сектора или сегмента цилиндра с цилиндрическим основанием 4 постоянного радиуса кривизны r, установлен горизонтально своей продольной осью Ot вдоль оси корпуса судна и имеет контакт с двумя, или большим количеством горизонтально установленных параллельно цилиндрической поверхности трюм-грузов, цилиндрических опорных роликов 5, шипы 15 которых введены с возможностью свободного кругового движения в половинки закрепленных на днищевой секции 6 и на бортах корпуса плавающего средства опорных подшипников скольжения 16, что обеспечивает трюм-грузу, за счет инерции его массы и трения качения с роликом, устойчивую вертикальную ориентацию к центру Земли при любом угловом положении корпуса плавающего средства. При этом центр Og массы трюм-груза совмещен с вертикальной осью, которая проходит через ось Ot, совмещенную с центром кривизны дугового основания 4, а вес P трюм-груза распределен между правым (п) и левым (л) опорными роликами с реакциями опор Nn, Nл, которые раскладываются на правую и левую вертикальную Yn(л) и горизонтальную Xn(л) составляющие силы и образуют в правой и левой зонах контакта On(л) окружные силы 

Для ограничения сектора дугового движения трюм-грузов при качке волнами или ветром корпуса судна, на днищевой секции 6 и на верхних участках бортов 13 и 14 корпуса установлены демпферы 17, которые введены в контакт с поверхностями трюм-грузов и с упорами 18, закрепленными на поверхностях трюм-грузов.
На фиг. 3 показана кинематическая связь трюм-грузов 2 и опорных роликов 5 с установленными на днищевой секции 6 электрогенераторами 19, которая создана упругими соединительными муфтами 20, закрепленными на торцах роликов и на концах валов 21 статоров. При этом электрогенераторы могут быть установлены с одной (исполнение 1) или с двух сторон опорного ролика, а для исключения продольного сдвига трюм-груза при резких ударах волн и выхода его радиусной боковой и торцовых поверхностей из контакта с опорными роликами 5, на их торцах закреплены фланцы или выполнены реборды 22 (исполнение 2).
Принцип действия систем, показанных на фиг. 2 и 3, следующий. При наклоне волнами и ветром корпуса судна на угол -α против часовой стрелки, трюм-груз 2 с цилиндрическим основанием 4 постоянного радиуса кривизны r, за счет инерции его массы и возможности качения по опорным роликам 5, сохранит устойчивую вертикальную ориентацию к центру Земли, а окружные силы

Аналогична система установки и действия трюм-грузов 2 и опорных роликов 5 со связанными с ними кинематически электрогенераторами 19 при их установке вдоль оси корпуса судна в отсеках между их перегородками 7.
На фиг. 4 показано новое исполнение опорных роликов 5, у которых для уменьшения удельных контактных нагрузок, в половинки подшипников скольжения 23 введены фланцы или реборды 22, а для устранения нагрузок на опорные ролики в средней части 24, их наружные диаметры (исполнение 1), и/или радиусы цилиндрических поверхностей на среднем участке 25 трюм-груза 2 (исполнение 2), выполнены уменьшенными. Для смягчения инерционных ударов трюм-грузов от действия волн на корпус судна, на их боковые и торцовые поверхности, контактирующие с поверхностями опорных роликов, и/или на адекватные им поверхности опорных роликов может быть нанесен слой упругого материала. Кроме того, опорные ролики 5 и связанные с ними электрогенераторы 19 могут быть установлены на платформах 26, демпфированных упругими опорами - пружинами 27, и/или рессорами, и/или гидравлическими и/или пневматическими демпфирующими устройствами, установленными на днищевой секции 6 и на бортах 14 корпуса судна (исполнение 3). При этом опорные ролики 5 могут быть установлены с упором их наружных цилиндрических поверхностей 28 в параллельные им пары цилиндрических поверхностей опорных стержней 29, которые введены в свои опорные подшипники 30.
Для повышения устойчивости положения грузов при сильных ударах волн, их ширина составляет не менее половины их высоты, а со стороны их торцов выполнены предохранительные опорные пояса и/или стойки.
Принцип действия данных систем отличается от предыдущих только по контактным нагрузкам между грузами, роликами и их подшипниками.
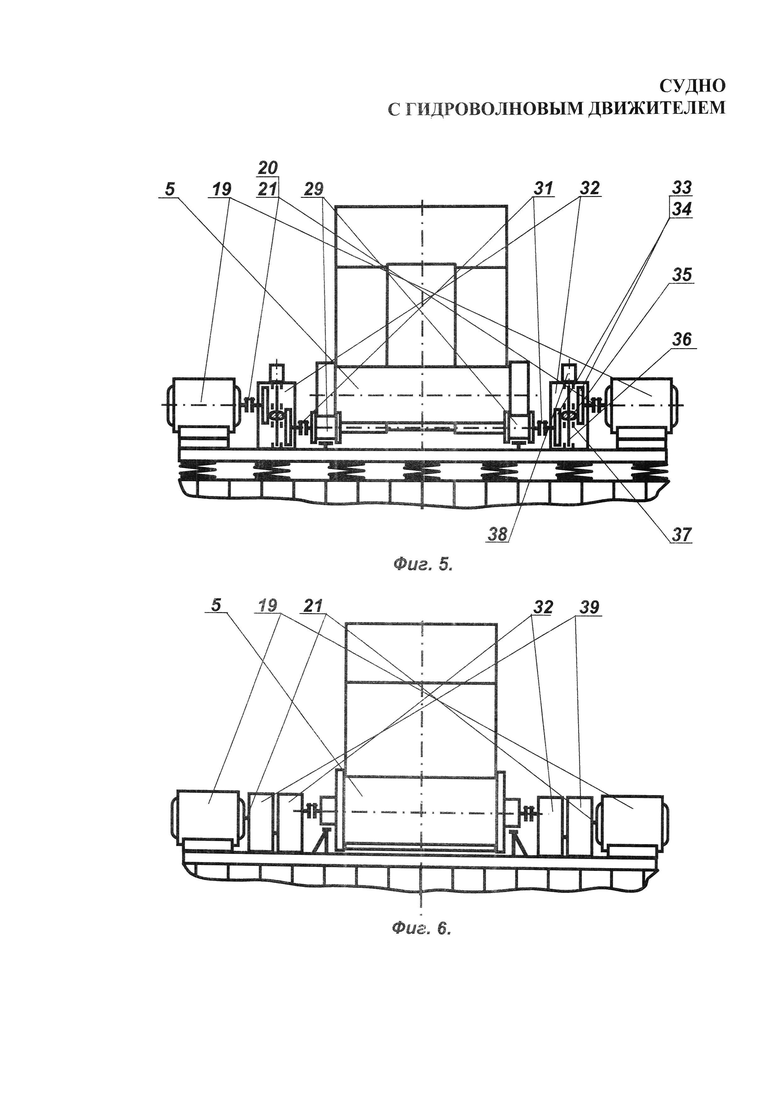
На фиг. 5 показано развитие кинематической связи опорных роликов 5 с электрогенераторами 19, у которых для увеличения частоты вращения вала 21 ротора, он связан с опорными стержнями 29 соединительными муфтами 20 и 31, а для ее регулировки, между ними установлены вариаторы 32, например, содержащие жестко закрепленные на параллельных полуосях 33 диски 34, у которых обращенные друг к другу торцовые поверхности кинематически связаны между собой роликом 35 с наружной поверхностью конической или дуговой формы, который имеет возможность свободного вращения на своей оси 36 и принудительного сдвига по ней с помощью вилки 37, имеющей резьбовое отверстие, в которое веден ходовой винт с приводом от шагового электродвигателя 38. Вместо дисков, на параллельных полуосях могут быть жестко закреплены конусы, обращенные со стороны их вершин друг к другу своими боковыми поверхностями, и кинематически связанные между собой аналогичным роликом с его приводным устройством.
Принцип действия данной системы отличается от предыдущих тем, что за счет принудительного сдвига в вариаторе 32 относительно поверхностей его двух фрикционных дисков 34, свободно вращающегося на оси 36 ролика 35 с помощью вилки 37, имеющей резьбовое отверстие, веденное в вит с приводом от шагового электродвигателя 38, радиусы контакта роликов на дисках, и соответственно - частота их вращения, меняются, что позволяет сохранить ее постоянство за счет управления количеством оборотов винта и смещения вилки от шагового электродвигателя.
На фиг. 6 показано развитие кинематической связи опорных роликов 5 с электрогенераторами 19, у которых для увеличения частоты вращения вала 21 ротора, после вариаторов 32 установлены мультипликаторы 39.
Принцип действия данной системы отличается от предыдущих тем, что за счет мультипликаторов 39 частота вращения вала ротора повышается, что улучшает массово-энергетические показатели электрогенераторов.
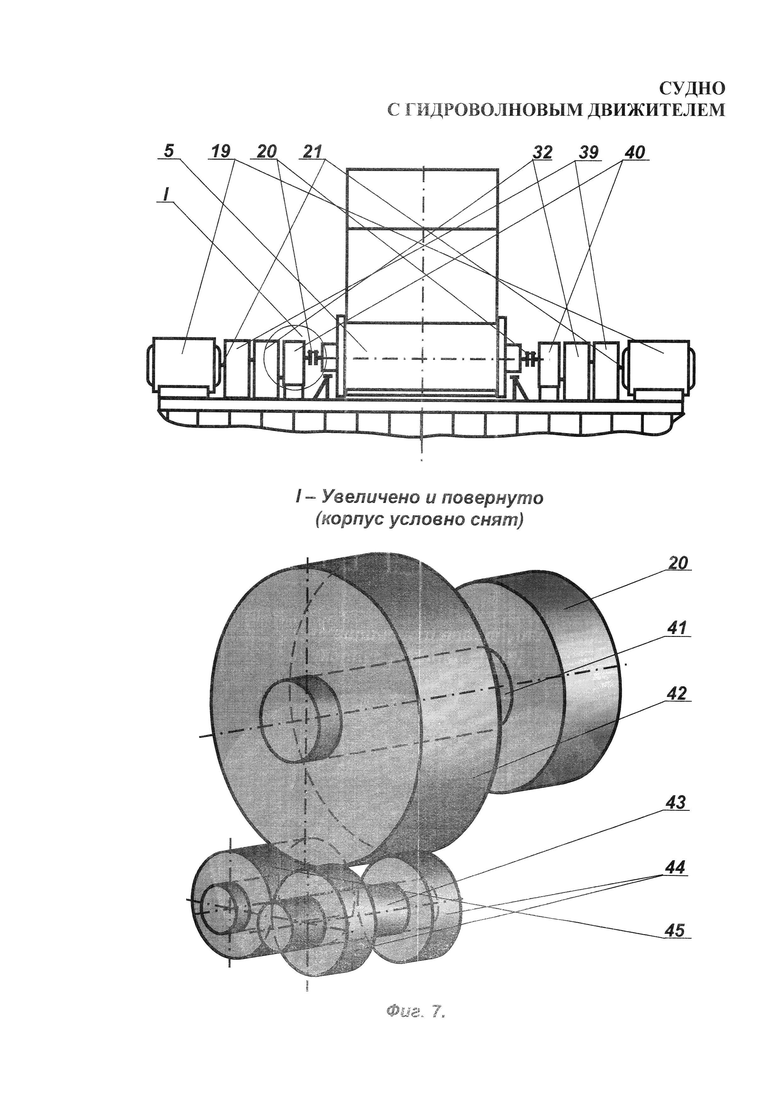
На фиг. 7 показано развитие кинематической связи опорных роликов 5 с электрогенераторами 19, у которых для исключения реверса вращения валов 21 роторов при разных направлениях наклона корпуса судна волнами, после соединительных муфт 20 и перед вариаторами 32 и/или мультипликаторами 39 установлены дополнительные обгонные устройства 40, у которых на входном валу 41 установлено ведущее зубчатое колесо 42, которое на первой половине ширины своего венца напрямую введено в зацепление с одной из двух установленных на выходном валу 43 обгонных муфт 44 со своими зубчатыми венцами, а на второй половине ширины венца - ведущее зубчатое колесо введено в зацепление с первой половиной ширины венца паразитной шестерни 45, которая на второй половине ширины своего венца введена в зацепление с зубчатым венцом второй обгонной муфты 44, что обеспечивает чередование зацепления этих муфт с выходным валом при противоположных направлениях вращения ведущего зубчатого колеса.
Принцип действия данной системы отличается от предыдущих тем, что при вращении зубчатого колеса 42 в одну сторону, одна из обгонных муфт 44 вводит в зацепление связанную с ними шестерню выходного вала 43, а другая обгонная муфта, связанная с зубчатым колесом через паразитную шестерню 45, выводит из зацепления связанную с ними шестерню выходного вала 43. При вращении зубчатого колеса 42 в другую сторону, зацепление обгонных муфт 44 имеет противоположный характер, поэтому вращение выходного вала 43 осуществляется через паразитную шестерню 45, что сохраняет его направление, одинаковым с исходным.
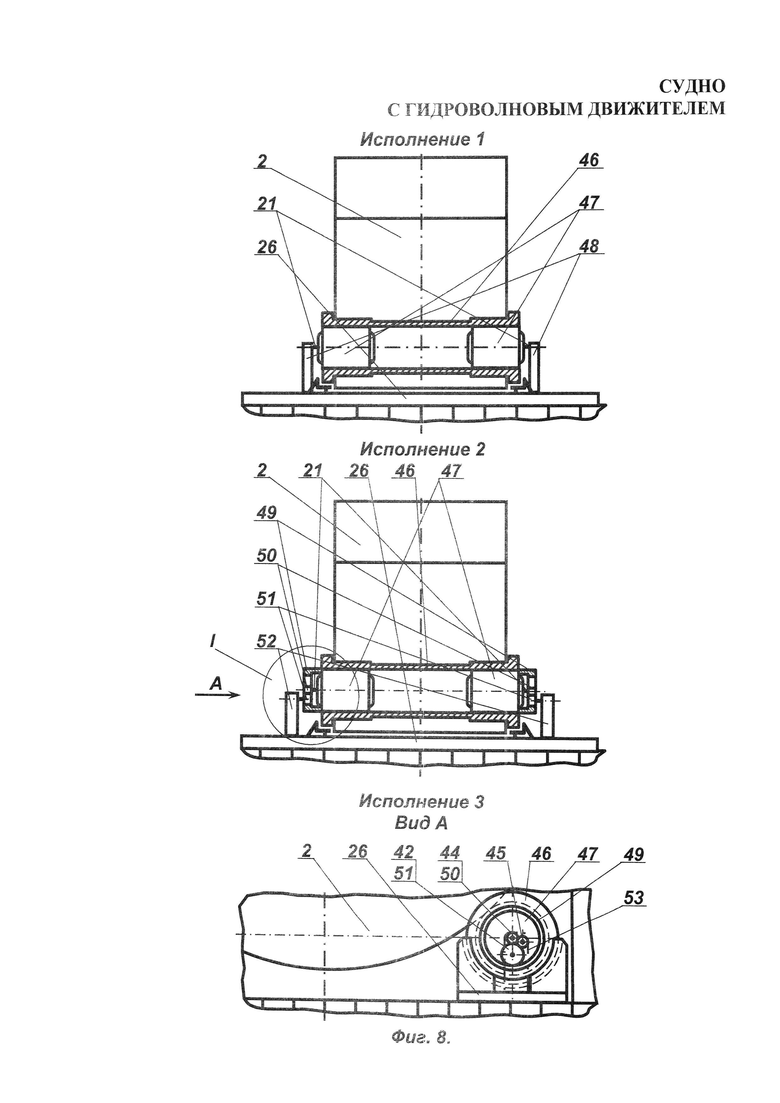
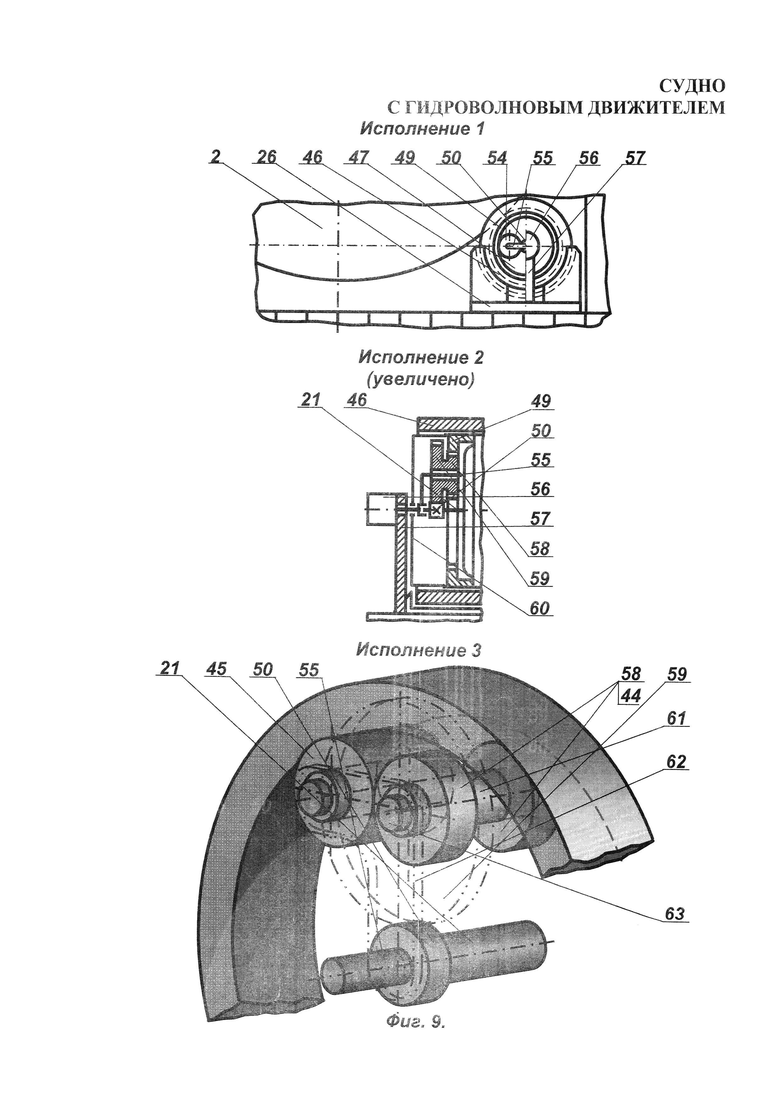
На фиг. 8 показано новое исполнение судна, у которого для уменьшения объема занимаемого в отсеках электрогенераторами пространства, опорные ролики 46 для установки на них грузов 2, выполнены полыми, а внутрь их введены и закреплены статоры 47 электрогенераторов, у которых концы 21 валов роторов неподвижно связаны стойками 48 с опорной платформой 26 для установки роликов (исполнение 1). Для увеличения частоты вращения валов 21 роторов электрогенераторов, введенных вовнутрь полых опорных роликов 46, на которые свободно установлен трюм-груз 2, на торце со стороны вала ротора по периферии статора 47, или на торце по периферии опорного ролика закреплен зубчатый венец 49 с внутренними зубьями, а на конце вала ротора закреплена шестерня 50, между которыми введено в зацепление паразитное зубчатое колесо 51, установленное на оси, имеющей возможность вращения в стойке 52, связанной с опорной платформой 26 (исполнение 2). Установка внутреннего зубчатого венца по периферии на торце опорного ролика усложняет связь осей сопрягаемых зубчатых колес и их межцентровых расстояний, однако ее достоинством является возможность замены этим зубчатым венцом реборд или фланцев на опорных роликах. Исключение реверса ротора электрогенератора (исполнение 3) возможно по схеме, показанной на фиг. 7. При этом паразитное зубчатое колесо 51, подобно ведущему колесу 42, половиной ширины своего венца введено в зацепление с одной из обгонных муфт 44, связанных с концом вала ротора, а второй половиной ширины своего венца - с первой половиной ширины венца паразитной шестерни 45, которая второй половиной ширины своего венца введена в зацепление со второй обгонной муфтой 44. Эти обгонные муфты имеют зубчатые венцы, адекватные шестерне 50, или одна из полумуфт в этих муфтах жестко связана с такой шестерней, а стойка 53 (условно снята) создает жесткую связь осей паразитного зубчатого колеса 51 и шестерен 45 и 50. Остальные элементы конструкций системы аналогичны предыдущим исполнениям 1 и 2.
Принцип действия показанной на фиг. 8 системы из трюм-грузов 2, опорных роликов 46 и электрогенераторов, отличается от показанных на фиг. 2 и 3 в исполнении 1 тем, что вращение имеют статоры 47, введенные внутрь полых роликов 46, а валы 21 роторов заторможены закрепленными на платформе 26 стойками 48. Для улучшения охлаждения электрогенераторов, на наружной поверхности их статоров выполнены охлаждающие ребра, которые создают зазоры с внутренней поверхностью роликов, а в них могут быть выполнены проемы и установлены устройства для принудительной вентиляции. Отличия в принципе действия по исполнению 2 связаны с принудительными вращением ротора в сторону, противоположную вращению статора, за счет установки по периферии на его торце 47 зубчатого венца 49 с внутренними зубьями, а на конце вала ротора-шестерни 50, между которыми введено в зацепление паразитное зубчатое колесо 51, установленное на оси стойки 52, связанной с опорной платформой 26. Отличия в работе системы в исполнении 3 связаны с исключением реверса ротора электрогенератора при обратном направлений вращения опорных роликов 46. Например, при их вращении по часовой стрелке, паразитное зубчатое колесо 51, введенное в зацепление половиной ширины своего зубчатого венца с концом вала ротора через одну из обгонных муфт 44, связанных с концом вала ротора, напрямую обеспечивает его вращение, а второй половиной ширины своего венца, введенной в зацепление с первой половиной ширины зубчатого венца паразитной шестерни 45, которая второй половиной ширины своего венца введена в зацепление со второй обгонной муфтой 44, обеспечивает ее вращение в другую сторону, что выводит ее из зацепления с валом ротора, При обратном направлении вращения опорных роликов 46 и зубчатых колес с внутренним венцом 49, обгонные муфты 44 включаются в работу обратном порядке - первая выходит из зацепления с валом ротора, а вторая - входит, что через паразитную шестерню 45 обеспечивает валу ротора предыдущее направление вращения.
На фиг. 9 показано развитие предыдущих исполнений суден, имеющих электрогенераторы, введенные вовнутрь опорных роликов 46, со свободно установленным на них трюм-грузом 2. При этом на торцах статоров 47 электрогенераторов выполнены мультипликаторы, у которых зубчатый венец 49 с внутренними зубьями закреплен по периферии торца, а на конце вала ротора закреплена шестерня 50, которая является солнечной, а между ними введено в зацепление планетарное паразитное зубчатое колесо 54, свободно установленное на водиле 55 с индивидуальным приводом 56, например, от электродвигателя, закрепленного на стойке 57, размещенной на опорной платформе 26 (исполнение 1). Для регулировки частоты вращения вала ротора, привод водила составлен из электродвигателя постоянного тока, или переменного тока с вариатором, и снабжен управляющим устройством, с датчиками угла поворота опорного ролика. Для увеличения передаточного числа мультипликатора, он выполнен двухступенчатым (исполнение 2), для чего между его внутренним зубчатым венцом 49 и закрепленной на валу 21 ротора электрогенератора солнечной шестерней 50, на водиле 55, снабженном индивидуальным приводом 56, закрепленным на стойке 57, установлен сдвоенный планетарный блок дифференциала, состоящий из введенной в зацепление с внутренним зубчатым венцом шестерни 58 и зубчатого колеса 59, введенного в зацепление с шестерней 50 вала ротора. Для исключения повреждений, мультипликатор закрыт крышкой 60, закрепленной на зубчатом венце 49, которые вместе с электрогенератором введены вовнутрь полого опорного ролика 46. Для исключения реверса ротора электрогенератора (исполнение 3), по схеме, подобной показанной на фиг. 7. зубчатое колесо с внутренним венцом 49 половиной ширины своего зубчатого венца введено в зацепление с одной из обгонных муфт 44, связанных с осью 61 планетарного блока, а второй половиной ширины своего венца - с первой половиной ширины венца паразитной шестерни 45, которая второй половиной ширины своего венца введена в зацепление со второй обгонной муфтой 44. Обе эти муфты имеют зубчатые венцы, адекватные зубчатым колесам 58, или одна из их полумуфт жестко связана с зубчатыми колесами 58, а парное им зубчатое колесо 59 блока с Г-образной или Т-образной боковой планкой 62 (условно сняты) и полуосью 63 водила 55 введено в зацепление с солнечной шестерней 50 вала 21 ротора электрогенератора.
Отличия в принципе работы нового варианта судна от предыдущих вариантов, показанных на фиг. 8, связаны с увеличением частоты вращения валов роторов электрогенераторов за счет установки в мультипликаторе, между его зубчатым колесом с внутренним венцом 49 и закрепленной на конце вала ротора солнечной шестерней 50, дифференциала с планетарным зубчатым колесом 54, установленным на водиле 55 при его вращении вместе с зубчатым колесом относительно введенных с ним в зацепление с зубчатого колеса 49 и шестерни 50 (исполнение 1). Другое отличие - регулировка частоты вращения вала ротора вращением водила 55 с заданной частотой от индивидуального привода 56, например электродвигателя постоянного тока, или переменного тока с вариатором, закрепленным на установленной на опорной платформе 26 стойке 57. Работа электрогенератора в исполнении 2 отличается от предыдущего исполнения увеличением передаточного числа мультипликатора за счет выполнения его двухступенчатым и повышения частоты вращения закрепленной на конце вала 21 ротора электрогенератора солнечной шестерни 50 введенным между ней и внутренним зубчатым венцом 49, установленным на водиле 55 с индивидуальным приводом 56 сдвоенным планетарным блоком, состоящим из зубчатых колес 58 и 59. Принцип работы в исполнении 3 отличается от предыдущих исполнений исключением реверса ротора электрогенератора за счет установки на оси 61 планетарного блока из двух зубчатых колес 58, связанных с обгонными муфтами 44, одно из которых введено в зацепление с зубчатым колесом с внутренним венцом 49 напрямую, а другое - выведено за этот венец и введено с ним в зацепление через паразитную шестерню 45. При этом зацепление обгонных муфт с осью планетарного блока происходит при обратных направлениях вращения венца 49 зубчатого колеса с внутренними зубьями, что обеспечивает одинаковое направление вращения вала 21 ротора электрогенератора.
Исключение реверса ротора в исполнениях 1 и 2, возможно также при дополнительном вращении водила 55 с частотой, в два раза большей частоты попутного ему вращения ролика.
При установке платформы 26 на упругие упоры, подобные показанным на фиг. 4, компенсирующие ударные нагрузки от действия волн на корпус судна, все зубчатые колеса и шестерни, показанные на схемах фиг. 8 и 9, не будут воспринимать ударных нагрузок, поскольку находятся между собой в одной жестко связанной системе со стойками и платформой.
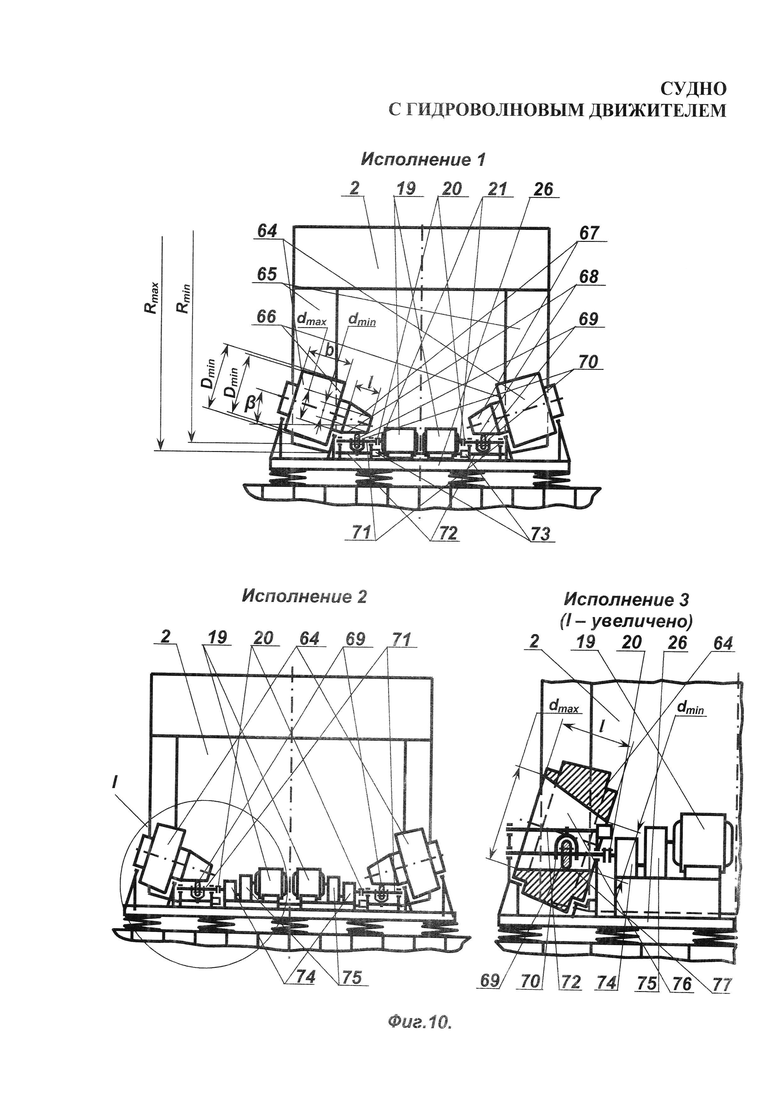
На фиг. 10 показано новые исполнения трюм-грузов 2 и установленных на опорной платформе 26, в т.ч. - подпружиненного типа, опорных роликов 64, у которых для исключения возможности продольного сдвига трюм-грузов и выхода их радиусной поверхности из контакта с поверхностями опорных роликов при резких ударах волн в корпус судна, на обоих торцах трюм-груза 2 выполнены конические фаски 65, с уменьшением радиусов от Rmax до Rmin, а для исключения различных линейных скоростей вращения на поверхностях контактирующих с ними опорных роликов, они имеют меньший диаметр Dmin, который введен в контакт с радиусом Rmin и больший диаметр Dmax, который введен в контакт с радиусом Rmax, при соотношении размеров Dmax:Dmin=2(Rmax:Rmin) (исполнение 1), а их оси и оси сопрягаемых с ними устройств, имеют угол наклона β, равный величине:
Для регулировки частоты вращения роторов электрогенераторов, на торцах 66 опорных роликов, повернутых к среднему поперечному сечению трюм-груза, выполнены конические хвостовики 67, длиной l и диаметрами dmax, dmin которых создан наклон боковой поверхности 68 конуса параллельно плоскости опорной платформы 26, с ними введены в контакт промежуточные фрикционные ролики 69, размещенные с возможностью свободного вращения в вилках 70 и зацепления со шлицевыми валами 71, параллельными плоскости опорной платформы 26. Вилки, для продольного движения их фрикционных роликов по шлицевому валу, имеют резьбовое отверстие, в которое введен параллельный шлицевому валу ходовой винт 72, имеющий индивидуальный привод 73, а сам шлицевый вал связан соединительной муфтой 20 с концом 21 вала ротора электрогенератора 19. Для исключения реверса роторов электрогенераторов 19 при разных направлениях вращения трюм-грузом опорных роликов 64 (исполнение 2), со шлицевыми валами 71 фрикционных роликов 69 связаны соединительными муфтами 20 обгонные устройства 74, которые по схеме, показанной на фиг. 7, взаимодействуют с концами валов роторов через промежуточные ведущие зубчатые колеса и введенные с ними в зацепление обгонные муфты и паразитные шестерни, а для увеличения частоты вращения роторов электрогенераторов, они введены в зацепление с мультипликаторами 75. Для уменьшения габаритов системы, состоящей из электрогенераторов 19 и их кинематической связи с коническими опорными роликами 64 (исполнение 3) последние выполнены полыми, с коническими отверстиями 76, длина l и диаметры dmax, dmin которых обеспечивают наклон внутренней боковой поверхности 77 конуса параллельно опорной платформе 26, а с ними введены во внутренний контакт промежуточные фрикционные ролики 69, установленные с возможностью свободного вращения в вилках 70 и в зацеплении на шлицевых валах 71, параллельных опорной платформе 26. В отличие от предыдущего исполнения, вилки, их резьбовые отверстия и ходовые валы 72 расположены над роликами. Все остальные конструктивные элементы, включая обгонные устройства 74 и мультипликаторы 75, одинаковы с предыдущим исполнением.
Выполнение конических опорных роликов 64 с введенными вовнутрь электрогенераторами и цилиндрическими полостями по схемам, показанным на фиг. 8, нецелесообразно, поскольку наклон оси опорных роликов ведет к ухудшению работы подшипников электрогенераторов и зубчатых передач.
Принцип действия данной системы из трюм-грузов 2, опорных роликов 64 и электрогенераторов, показанных на фиг. 10 в исполнении 1, отличается от показанных на фиг. 2 и 3 тем, что на трюм-грузах выполнены фаски 65, которые исключают выход трюм-грузов из контакта с опорными роликами при ударах волн, а с фасками - согласованы конические контактирующие поверхности опорных роликов, исключающие их относительное скольжение при качении друг по другу, что обеспечивает к установка опорных роликов с наклоном их продольной оси в вертикальной и горизонтальной плоскостях. Кроме того, выполнение на внутренних торцах опорных роликов конических хвостовиков 67, диаметры и длина которых обеспечивают горизонтальное положение боковой поверхности 68 конуса, заменяет вариатор, поскольку разные диаметры конуса создают возможность изменения частоты вращения установленного на шлицевом валу 71 фрикционного ролика 69 при смещении его по валу вилкой 70 с помощью выполненной в ней гайки и введенного в нее ходового винта 72, имеющего индивидуальный привод 73. В исполнении 2 принцип работы всех составных элементов системы, включая устройства 74 для исключения реверса ротора электрогенератора при разных направлениях вращения опорных роликов 64 грузами 2, а также мультипликаторы 75 для увеличения частоты вращения роторов, не отличаются от рассмотренных ранее. В исполнении 3 отличия связаны только с внутренним расположением конуса 76 и верхним расположением вилки 70 и ходового винта 72, что не оказывает принципиального влияния на работу всех составных механизмов.
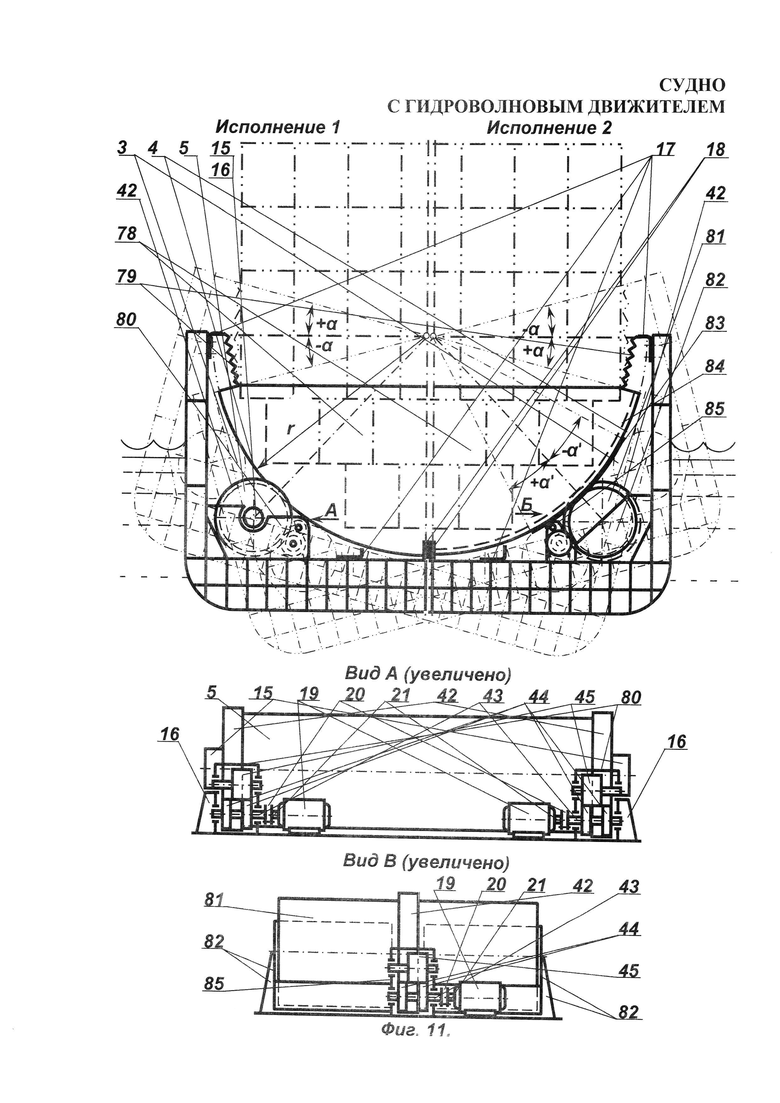
На фиг. 11 показано новые исполнения трюм-грузов 78, используемых, например, для перевозки контейнеров, у которых для создания герметичности отсеков 3, выполнены гофрированные или сворачиваемые в рулон защитные экраны 79, а контакт трюм-грузов и корпуса судна в его крайних положениях при качке на угол ±α волнами и ветром, смягчают демпферы 17 и выступы 18. Трюм-груз 78 установлен своим дуговым основанием 4 радиуса r на боковые продольные опорные ролики 5 (исполнение 1) с шипами 15, введенными в опоры 16 с подшипниками скольжения, и имеет возможность устойчивой его ориентации к центру Земли за счет собственного веса и свободного качения по продольным опорным роликам при бортовой качке корпуса судна волнами и ветром на угол ±α. Другим отличием опорных роликов 5, кинематически связанных со своими электрогенераторами 19, является выполнение на их торцах реборд в виде ведущих зубчатых колес 42, у которых, для исключения реверса ротора электрогенератора при прямом и обратном качении трюм-грузов, выполнен широкий зубчатый венец, и первая половина его ширины введена в зацепление с зубчатым венцом установленной на выходном валу 43 первой обгонной муфты 44, а вторая половина ширины венца ведущего зубчатого колеса введена в зацепление с первой половиной ширины зубчатого венца паразитной шестерни 45, которая второй половиной ширины своего венца введена в зацепление с зубчатым венцом второй обгонной муфты 44, что создает при противоположных направлениях вращения ведущего зубчатого колеса чередование зацепления этих муфт с выходным валом 43, который связан соединительной муфтой 20 с валом 21 ротора электрогенератора 19 и сохраняет прежнее направление его вращения. Для фиксации расположения осей ведущих зубчатых колес, паразитных шестерен и обгонных муфт, они введены в общие корпуса 80, связанные с опорами 16.
В исполнении 2 опорные ролики 81, которые кинематически связаны с электрогенераторами 19, своими цилиндрическими поверхностями и торцами введен в опоры 82 с подшипниками скольжения, а на секторе ±α контакта с ним трюм-груза 78 нанесен слой 83 упругого материала. Ведущие зубчатое колесо 42 с широким зубчатым венцом выполнено в средней части опорного ролика и введено в адекватную форме его венца канавку 84, выполненную на цилиндрической поверхности трюм-груза 78, что исключает его осевой сдвиг вдоль опорных роликов при ударах волн в корпус судна, а первая половина ширины зубчатого венца ведущего зубчатого колеса введена в зацепление с зубчатым венцом установленной на выходном валу 43 первой обгонной муфты 44, а вторая половина ширины зубчатого венца ведущего зубчатого колеса введена в зацепление с первой половиной ширины зубчатого венца паразитной шестерни 45, которая второй половиной ширины своего венца введена в зацепление с зубчатым венцом второй обгонной муфты 44, что создает при противоположных направлениях вращения ведущего зубчатого колеса чередование зацепления этих муфт с выходным валом 43, связанным через соединительную муфту 20 с валом 21 ротора электрогенератора 19. Для фиксации положения ведущего зубчатого колеса, осей паразитной шестерни и обгонных муфт, они введены в общий корпус 85, связанный с опорами 82. Для регулировки частоты вращения роторов электрогенераторов, между их валами и выходными валами обгонных муфт могут быть введены вариаторы с индивидуальными регулирующими устройствами.
Принцип действия системы при контакте трюм-грузов 78 с опорными роликами 5 и 81 не отличается от приведенного на фиг. 2, а принцип действия зубчатых колес 42 и обгонных муфт 44 - от приведенного на фиг. 7, отличия имеются лишь в местах их установки на опорных роликах - в средней части и на торцах. Другим отличием является создание герметичности отсеков 3 за счет их соединения с трюм-грузами с помощью гибких, гофрированных или сворачиваемых в рулон экранов 79, однако принцип их действия очевиден из их назначения.
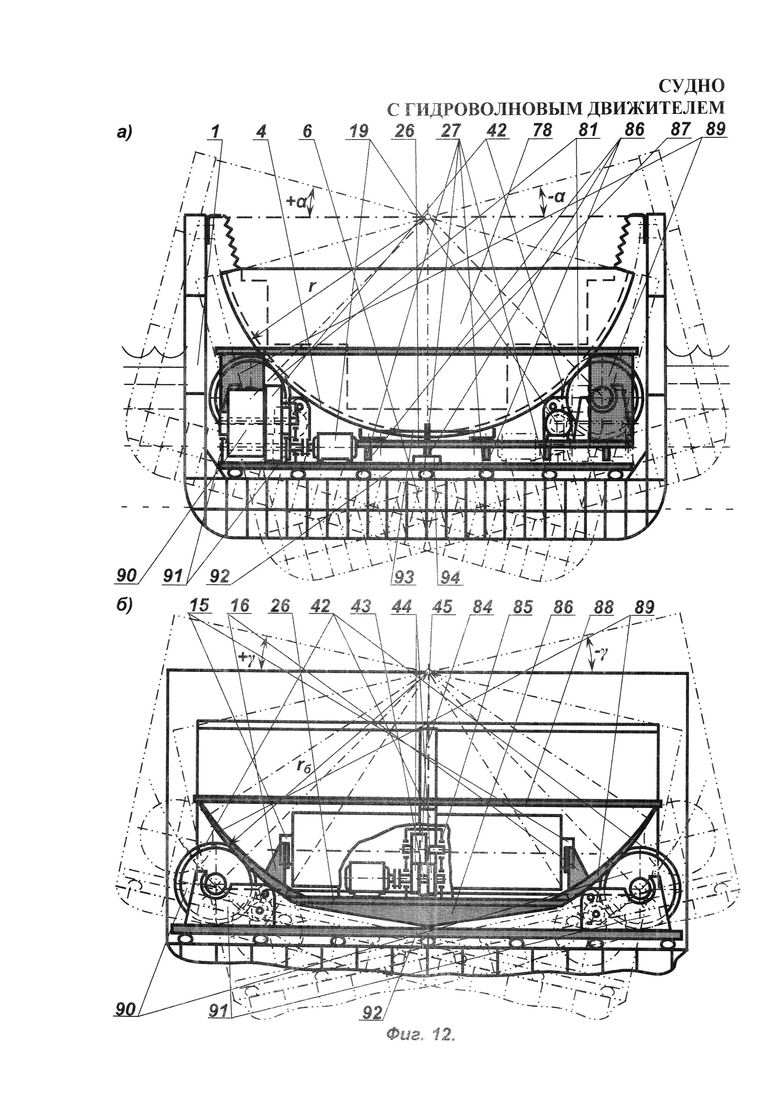
На фиг. 12 показан новый вариант гидроволнового движителя, который обеспечивает возможность одновременного восприятия бортовой качки (а) и килевой качки (б) под углами ±α и ±γ корпуса 1 судна волнами и ветром. При этом трюм-грузы 78 с цилиндрическим основанием 4 радиуса r установлены поперек корпуса судна, а по образующей цилиндра - на боковые продольные опорные ролики 81, кинематически связанные с электрогенераторами 19 и размещенные на поперечной опорной платформе 26 с ребрами жесткости 86, с возможностью устойчивой ориентации трюм-грузов к центру Земли за счет их собственного веса и свободного их качения по продольным опорным роликам при бортовой качке корпуса судна. Опорные ролики могут быть введены в опоры 16 шипами 15, или своими наружными цилиндрическими поверхностями и их торцами (см. фиг. 11). Для восприятия килевой качки корпуса судна, параллельно его продольной оси на поперечной опорной платформе установлены скрепленные поперечными 87 и продольными 88 балками боковые дуговые опоры 89 радиуса rб, которыми она, за счет своего веса и веса размещенного на ней трюм-груза, установлена с возможностью устойчивой ориентации к центру Земли и с возможностью свободного качения на поперечные боковые опорные ролики 90, которые кинематически связаны со своими электрогенераторами 19 (с правого борта условно сняты), и размещены в опорах 91 на остове 6 корпуса судна, а для смягчения ударов волн о корпус судна - они размещены на продольной опорной платформе 92, демпфированной от остова и бортов пружинами 27, и/или рессорами, и/или гидравлическими и/или пневматическими демпфирующими устройствами, и/или их комбинациями. Для исключения ударов трюм-грузов о продольную опорную платформу при максимальных углах наклона ±γ, в их нижней части у торцов выполнены продольные скосы 93 с углами ±γ, с которыми входят в контакт демпферы 94, установленные на продольной опорной платформе. Для исключения реверса роторов электрогенераторов при прямом и обратном качении трюм-грузов и поперечных опорных платформ на опорных роликах, на них в любом исполнении, показанном на фиг. 11, выполнены ведущие зубчатые колеса 42 с широким зубчатым венцом, с которым напрямую, или через паразитную шестерню 45 ведены в зацепление зубчатые венцы 44 установленных на валу 43 обгонных муфт, который соединительной муфтой 20 связан с валом 21 ротора электрогенератора, при этом валы обгонных муфт и оси зубчатых передач связаны общим корпусом 85.
Принцип действия нового гидроволнового движителя от предыдущего, отличается возможностью восприятия качки волнами и ветром корпуса судна в двух направлениях - в продольном (килевом) и поперечном (бортовом), за счет ввода дополнительной продольной опорной платформы 94, на которой закреплены кинематически связанные со своими электрогенераторами 19 поперечные опорные ролики 90, и свободной установки на них поперечной опорной платформы 26, у которой выполнены боковые дуговые опоры 89 радиуса rб, позволяющие ей, за счет своего веса и веса размещенного на ней трюм-груза 78, иметь устойчивую вертикальную ориентацию к центру Земли и свободное качение по боковым поперечным опорным роликам с вращением их от действия окружных сил. Далее передача вращения поперечных опорных роликов 90 роторам электрогенераторов, а также вращение трюм-грузами боковых продольных опорных роликов 81 и кинематически связанных с ними электрогенераторов, не отличается от вариантов, рассмотренных на фиг. 7.
Для уменьшения нагрузок на пары опорных роликов, их количество во всех вариантах исполнений предлагаемых суден и трюм-грузов, показанных на фиг 1-12, может быть больше одной.
Совокупность приведенных в данной заявке на изобретение признаков конструкции судна и его гидроволновой двигательной установки является техническим решением, характеризующим устройство, которое не известно из существующего уровня развития техники, а его развитие в последующих вариантах исполнений - объединено единством замысла. По сравнению с известными техническими решениями, в т.ч. с прототипом, изобретательский уровень имеет установка трюм-грузов с основанием цилиндрической формы на пары опорных роликов, кинематически связанных с электрогенераторами, с возможностью устойчивой ориентации к центру Земли трюм-грузов при качке корпуса судна волнами и ветром. Все предлагаемые конструкции суден и их составных элементов имеют возможность промышленного изготовления и применения, что отвечает всей совокупности признаков, характеризующих предлагаемые технические решения, как изобретения.
Все предложенные варианты конструкций суден и их трюм-грузов, опорных роликов и кинематически связанных с ними электрогенераторов, обеспечивают стабильное вращение их роторов относительно статоров, в зависимости от частоты и амплитуды колебания судна волнами. При этом обеспечивается высокая мощность каждого генератора за счет большой массы грузов и окружных усилий, создаваемых ими на опорных роликах. Простота всех применяемых конструкций обеспечивает высокую надежность системы и эффективность ее применения за счет бесплатной энергии волн.
Реальные варианты исполнения предлагаемых суден возможные при любом виде их электрогенераторов, на базе уже существующих конструкций, а также дополняющих их технических устройств - трюм-грузов, опорных платформ, опорных роликов и их подшипников скольжения, соединительных муфт, зубчатых передач с обгонными муфтами и вариаторами, что облегчает их выбор, проектирование и изготовление, исходя из реальных размеров корпусов суден и условий их качки волнами.
Пример конкретного варианта исполнения предлагаемого судна принят на базе комбинированной продольной и поперечной установки трюм-грузов в отсеках, показанной на фиг. 1 в исполнении 3, в сочетании с конструкциями движителей, показанных на фиг. 9 в исполнении 3, со встроенными с обоих торцов в полые цилиндрические опорные ролики электрогенераторами с планетарными мультипликаторами, вращение водила которых обеспечивает также возможность исключения реверса ротора электрогенератора. Если мощность, получаемая при комбинированной схеме установки трюм-грузов, опорных роликов и электрогенераторов, окажется недостаточной, следует применить схему двухъярусной компоновки, показанную на фиг. 12 - с промежуточной поперечной опорной платформой и закрепленными на ней дуговыми основаниями, которыми она установлена на поперечные опорные ролики, однако это ведет к существенному удорожанию судна и уменьшению массы перевозимых грузов.
Считаем, что судно одновременно испытывает поперечную бортовую и продольную осевую качки корпуса, в диапазоне высот волн hв от 0,5 до 3 м, поскольку бри большей их высоте, зоны таких штормов судам рекомендуется обходить. Морские волны высотой hв от 0,5 до 3 м имеют:
длину между их гребнями  или от 5,3 до 46 м,
или от 5,3 до 46 м,
период колебаний τв=0,8√λв, или от 1,8 до 5,4 с.
Для реализации полного энергетического потенциала этих волн, длина корпуса судна должна составлять l=120 м, а ширина b=16 м. При высоте корпуса 10 м, осадке 6 м, это обеспечивает грузоподъемность ≈8 тыс. т. При поперечной и продольной качке корпуса судна и его равномерной загрузке, периоды его качки будут одинаковыми с волновыми τв, угол α поперечного наклона корпуса волнами относительно точки центра его тяжести составит величину: ±α≈±arcsin(hв/b), или от ±1,8° до ±10,8°, а угол γ поперечного наклона корпуса волнами относительно точки центра его тяжести составит: ±γ≈±arcsin(hв/(2l), или от ±0,5° до ±3°.
При выполнении продольных трюм-грузов в 3-м и 4-м отсеках в виде секторов стальных цилиндров радиуса r=7,5 м, со скосами в верхней части 10° и длине 20 м, их масса с грузом составит величину m≈2×1800 т. Для поперечных трюм-грузов во 2-м отсеке, при длине 14 м, их масса с грузом составит m≈2×1300 т., а в 1-м отсеке, за счет уменьшения длины и радиуса трюм-грузов r1=5,25 м, их масса составит m≈600+800 т. Общая масса ≈7600 т. Остальные 400 т, которые не превышают допустимых 5% недогруза судна, составляют массу 2-х поперечных и 2-х продольной опорных платформ, 4-х парных секций из 3-х полых поперечных роликов и 2-х парных секций из 3-х полых продольных опорных роликов в каждой, 72-х электрогенераторов и их планетарных мультипликаторов, количество которых может быть уменьшено на 24 штуки за счет увеличения длины опорных роликов и применения в них электрогенераторов увеличенной (нестандартной) длины. Расстояние между трюм-грузами и стенками отсеков судна, а также между ними и ширина проходов между выступающими частями опорных роликов с введенными в них электрогенераторами и мультипликаторами, приняты от 1 м до 0,6 м, что соответствует требуемым нормам.
При установке трюм-грузов на 6 опорных роликов, расположенных под углом 45° к грузу, согласно схем, показанных на фиг. 1 и 2, окружные силы 




Максимальный диаметр Dp опорных роликов при этом имеет величину:


Для удобства их размещения с подшипниками на опорных платформах, и для их унификации, принимаем Dp=1,5 м, что обеспечивает возможность установки внутри них электрогенераторов с наружным диаметром до 1,4 м.
Считаем, что все виды качки судно преодолевает под усредненным углом к волне в 45°, тогда, при таком соотношении размеров, энергетический потенциал вращения одного опорного ролика в обе стороны составит:
В 4-3-м отсеке 


Во 2-м отсеке  ,
, 

По сравнению с энергетическим потенциалом от качки продольных трюм-грузов, энергетический потенциал от качки поперечных трюм-грузов значительно уменьшился и во 2-м отсеке составил ≈20% от предыдущего значения::

В 1-м отсеке 





Их энергетический потенциал, по сравнению с энергетикой от качки продольных трюм-грузов, соответственно уменьшился до 9,4% и 6,4%:
Развиваемая одним продольным опорным роликом мощность при его вращении за период колебания τв корпуса судна волнами, составит величину:


Для поперечных опорных роликов во 2-м отсеке она составит:
Для поперечных опорных роликов в 1-м отсеке она составит:
С учетом к.п.д. системы ≈80%, фактическая мощность каждого из двух электрогенераторов в продольном опорном ролике составит величину:


Учитывая, что предельный угол бортовой качки таких суден волнами составляет величину ±12°, целесообразен запас по номинальной мощности электрогенератора до 500 кВт. Например, такой мощности удовлетворяет синхронный генератор СГФ 500, имеющий частоту вращения 500 мин-1, наружный диаметр 1380 мм, фланцевого типа в транспортном исполнении, приспособленном для работы при тряске, ударах и наклонах продольной оси, имеющих место при качке судна волнами.
Для двух электрогенераторов в поперечном опорном ролике, с учетом к.п.д. системы ≈80%, фактическая мощность каждого из них во 2-м отсеке составит величину:


С учетом унификации и того, что предельный угол осевой качки таких суден волнами составляет величину ±12°, т.е. в 4 раза больше расчетных ±3°, целесообразна замена 2-х электрогенераторов одним, для 
Аналогичный выбор целесообразен для всех электрогенераторов 1-го отсека, развивающих расчетную мощность:
Общая часовая мощность судна, с учетом к.п.д. электродвигателя 75%, составит величину:
ΣNч min=0,75(218·24+88·12+41·6+28·6)≈5025(кВт/ч)
Σч max=0,75(435·24+176·12+82·6+56·6)≈10050(кВт/ч)
При исходной мощности дизельного ДВС для данных параметров судна Nдв=6500 кВт/ч, минимальная высота волн 0,5 м и курсовые углы входа в них 45°, не обеспечивают требуемой мощности, однако ее можно компенсировать уменьшением этих углов до 30°. При высоте волн 1 м она обеспечивается при углах 45°, а при большей высоте - превышает ее, что позволяет накапливать электрическую энергию, например в конденсаторах, в т.ч. на случай полного отсутствия качки, что в Северном полушарии Земли бывает лишь в южных морях в летние месяцы 2-3 предутренних часа.
При двухъярусной компоновке с промежуточной поперечной опорной платформой и закрепленными на ней дуговыми основаниями, которыми она установлена на поперечные опорные ролики, мощность повысится в 1,5 раза по сравнению с рассмотренным вариантом комбинированной установки. Но при достаточной для замены базовых ДВС мощности качки, выполнение двухъярусной компоновки нецелесообразно, поскольку она удорожает судно.
Передаточное отношение величин поворотов трюм-груза и продольного опорного ролика составит:

Тогда при минимальных поворотах трюм-груза волнами на угол ±1,8° опорный ролик совершит поворот на ±1,8°·10=±18° за период τmin=1,8 с-1, а за 1 минуту он условно совершит 
При максимальных поворотах груза волнами на±10,8° опорный ролик совершит поворот на 10,8°·10=108° за период τmin=5,4 с-1, а за 1 минуту он условно совершит 
Для обеспечения требуемой частоты nг=500 мин-1 вращения ротора мультипликатор должен обеспечить общее передаточное отношение:
Для этих величин передаточных отношений целесообразно применение двухступенчатого планетарного мультипликатора, показанного на фиг. 9, в исполнении 2. При делительном диаметре внутреннего зубчатого венца 










В данной системе, для исключения реверса ротора электрогенератора, водило должно опережать вращение опорных роликов на их число оборотов, созданное качающимся трюм-грузом, что возможно при увеличении частот вращения водил на удвоенную частоту вращения опорных роликов: 

Для системы осевой качки корпуса судна 2-го отсека, уменьшение угла качки от ±0,5° до ±3°, или в 3,5 раза по сравнению с углами ±1,8° и ±10,8° поперечной качки, требует адекватного увеличения передаточных отношений и частот вращения зубчатых пар мультипликатора, а для 1-го отсека, их еще нужно увеличить на 30%, за счет уменьшения радиуса трюм-грузов с 7,5, до 5,25 м.
Расчет экономической эффективности предложенной конструкции судна показал, что при работе системы с мощностью Nдв=6500 кВт/ч 24 часа в сутки, за 250 суток в год его плавания, общая мощность составит величину:
ΣNдв=6500(кВт/ч)·24(ч)·250(суток)≈39 млн (кВт),
Для достижения такой мощности, ДВС судна требует расхода топлива 0,175 кг на 1 кВт, что составит его общую массу Мт:
Мт=39 млн (кВт)·0,175 (кг/кВт)=6,825 млн (кг), или 6825 т.
При средней стоимости 1 т топлива ≈500 $, средний годовой доход Д от эксплуатации предлагаемой гидроволновой системы составит:
Д=6825(т)·500($/т)=3142500($) или ≈3,4 млн $.
При этом исключаются затраты на приобретение и установку на судне ДВС, ≈2,5 млн $.
Таким образом, при средних затратах на оснащение предлагаемыми гидроволновыми системами судна ≈10 млн $, срок окупаемости составит около 2-х лет, а исключение затрат на бункеровку судна топливом, систем его хранения, подготовки и подачи, и других систем, а также исключение вредных выбросов в атмосферу продуктов сгорания топлива, его проливов в море и т.д., значительно увеличивает экономический и социальный эффект от внедрения предлагаемого изобретения. Решается также глобальная проблема исчерпаемости топлива на базе нефтепродуктов и газа.
Предложенные гидроволновые движители могут быть применены на всех морских судах длиной до 150 м и шириной до 20 м, доля которых в общем объеме транспортного флота ≈50%
Приведенные данные подтверждают целесообразность широкого внедрения предлагаемых гидроволновых движителей.
В настоящее время ведется подготовка к изготовлению предлагаемого судна и движителя на АО "Херсонский судостроительный завод", Украина.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 2014 |
|
RU2626188C2 |
| СПАСАТЕЛЬНАЯ ШЛЮПКА С ГИДРОВОЛНОВЫМ ДВИЖИТЕЛЕМ | 2014 |
|
RU2604252C2 |
| СПАСАТЕЛЬНАЯ ШЛЮПКА С ГИДРОВОЛНОВЫМ ДВИЖИТЕЛЕМ | 2014 |
|
RU2603812C2 |
| МАЯТНИКОВЫЙ ГИДРОВОЛНОВОЙ ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОГО ТОКА | 2012 |
|
RU2615288C2 |
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 2012 |
|
RU2603849C2 |
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ (ВАРИАНТЫ) | 2012 |
|
RU2702828C2 |
| СПАСАТЕЛЬНАЯ ШЛЮПКА С УСТРОЙСТВОМ ДЛЯ ОБЕСПЕЧЕНИЯ ЕЕ ХОДА | 2011 |
|
RU2479462C1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ МАШИНА С МЫШЕЧНЫМ ПРИВОДОМ | 2014 |
|
RU2635201C2 |
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 2012 |
|
RU2603847C2 |
| КАЧЕЛИ И ИХ ВАРИАНТЫ | 2011 |
|
RU2492902C2 |
Изобретение относится к судостроению, а именно к внутреннему устройству корпусов судов, двигателей и размещению грузов, а также к сфере гидроволновой энергетики, в частности к электрогенераторам. Судно с гидроволновым движителем использует энергию качки его корпуса волнами и ветром и содержит перемещающиеся относительно корпуса судна грузы, которые кинематически связаны с валами роторов электрогенераторов. Основания грузов выполнены по дуге окружности и имеют возможность дугового перемещения в его корпусе. Для образования энергетического потенциала гидроволнового движителя за счет массы перевозимых судном грузов, которые размещены во введенных в отсеки его корпуса емкостях-секторах цилиндров с дуговым основанием. Грузы установлены на параллельные основанию опорные ролики с возможностью устойчивой ориентации основания емкости с грузом к центру Земли в вертикальной плоскости и свободного поворота дуги основания на опорных роликах при качке ветром и волнами корпуса судна. С роторами или статорами электрогенераторов кинематически связаны опорные ролики. Достигается расширение эксплуатационных возможностей и повышение эффективности работы устройства путем увеличения количества энергии качки. 24 з.п. ф-лы, 12 ил.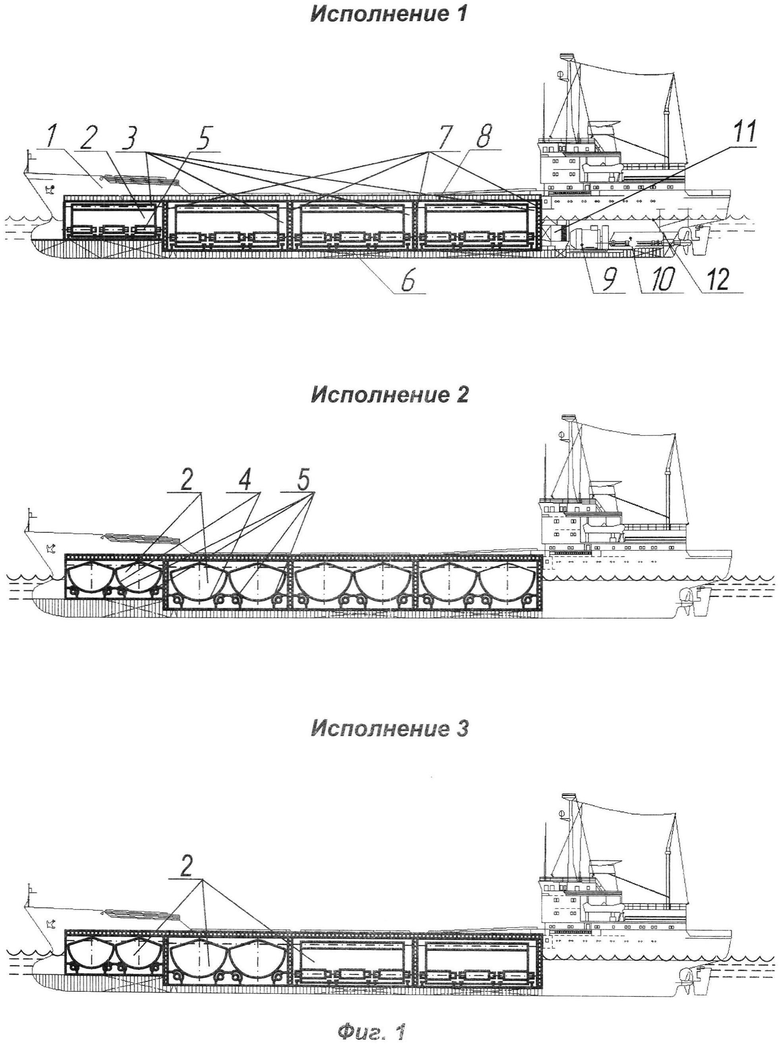
1. Судно с гидроволновым движителем, использующим энергию качки его корпуса волнами и ветром, содержащим перемещающиеся относительно корпуса судна грузы, которые кинематически связаны с валами роторов электрогенераторов, а основания грузов выполнены по дуге окружности и имеют возможность дугового перемещения в его корпусе, отличающееся тем, что для образования энергетического потенциала гидроволнового движителя за счет массы перевозимых судном грузов, они размещены во введенных в отсеки его корпуса емкостях-секторах цилиндров с дуговым основанием, которым они установлены на параллельные основанию опорные ролики с возможностью устойчивой ориентации основания емкости с грузом к центру Земли в вертикальной плоскости и свободного поворота дуги основания на опорных роликах при качке ветром и волнами корпуса судна, а с роторами или статорами электрогенераторов кинематически связаны опорные ролики.
2. Судно с гидроволновым движителем по п.1, отличающееся тем, что для восприятия поперечной качки его корпуса продольные оси емкостей с грузами и их опорные ролики размещены вдоль его оси.
3. Судно с гидроволновым движителем по п. 1, отличающееся тем, что для восприятия осевой качки его корпуса продольные оси емкостей с грузами и их опорные ролики размещены поперек его оси.
4. Судно с гидроволновым движителем по п.1, отличающееся тем, что для одновременного восприятия поперечной и осевой качки его корпуса часть емкостей с грузами и их опорными роликами размещена продольными осями вдоль оси корпуса судна, а дополняющая их часть - поперек его оси.
5. Судно с гидроволновым движителем по п.1, отличающееся тем, что для одновременного восприятия поперечной и осевой качки его корпуса емкости с грузами установлены по его оси на опорные ролики, продольно закрепленные на поперечных опорных платформах, а на них закреплены параллельно оси корпуса боковые дуговые опоры, которыми эти платформы установлены с возможностью их устойчивой ориентации к центру Земли и свободного их качания за счет собственного веса и размещенных на них грузов на дополнительные пары поперечно закрепленных боковых опорных роликов, кинематически связанных со своими электрогенераторами.
6. Судно с гидроволновым движителем по п.1, отличающееся тем, что для равномерного распределения окружных сил в точках контакта емкостей с грузами и опорных роликов при их начальном и возвратном качении эти ролики расположены радиально по обе стороны к дуге цилиндрического основания емкости под углом 45° или углом, отличающимся от него на ±10°.
7. Судно с гидроволновым движителем по п.1, отличающееся тем, что для ограничения угла дугового движения емкостей с грузами при качке волнами или ветром корпуса на основаниях и на верхних частях его отсеков установлены пружинные или иные демпферы, и/или гидравлические, и/или пневматические подушки, и/или их комбинации, которые введены в контакт с упорами, закрепленными на поверхностях этих емкостей.
8. Судно с гидроволновым движителем по п.1, отличающееся тем, что опорные ролики введены с возможностью свободного дугового движения в половинки опорных подшипников скольжения своими осевыми шипами-выступами, выполненными на торцах опорных роликов, и/или внешними цилиндрическими поверхностями и торцами этих роликов.
9. Судно с гидроволновым движителем по п.1, отличающееся тем, что для устранения нагрузок в средней части опорных роликов диаметры их цилиндрических поверхностей в средней части и/или радиусы средней части цилиндрических оснований контактирующих с ними емкостей с грузами выполнены уменьшенными по сравнению с крайними размерами.
10. Судно с гидроволновым движителем по п.1, отличающееся тем, что для смягчения ударов от действия волн на боковых и торцовых поверхностях емкостей с грузами, контактирующих с опорными роликами, и/или на поверхностях самих опорных роликов нанесен слой упругого материала.
11. Судно с гидроволновым движителем по п.1, отличающееся тем, что для смягчения ударов от действия волн опорные ролики и кинематически связанные с ними электрогенераторы установлены на опорных платформах, демпфированных от остова и бортов корпуса судна пружинами, и/или рессорами, и/или гидравлическими, и/или пневматическими подушками, и/или их комбинациями.
12. Судно с гидроволновым движителем по п.1, отличающееся тем, что для исключения продольного сдвига емкости с грузом и выхода ее цилиндрического основания за поверхности опорных роликов при резких ударах волн на обоих торцах этих роликов выполнены реборды или закреплены фланцы.
13. Судно с гидроволновым движителем по п.1, отличающееся тем, что кинематическая связь вала ротора электрогенератора с опорным роликом выполнена через соединительную муфту, связанную с осями их вращения.
14. Судно с гидроволновым движителем по п.1, отличающееся тем, что для исключения реверса ротора электрогенератора между осью вращения опорного ролика и валом ротора электрогенератора установлено обгонное реверсивное устройство, на входном валу которого установлено зубчатое колесо, а на выходном валу установлены друг за другом две обгонные муфты с наружными зубчатыми венцами или они связаны со своими шестернями, из которых одна введена в зацепление непосредственно с упомянутым зубчатым колесом на первой половине ширины его венца, а вторая - через зацепление с первой половиной ширины зубчатого венца паразитной шестерни, которая второй половиной ширины своего зубчатого венца введена в зацепление со второй половиной ширины зубчатого венца упомянутого зубчатого колеса,
15. Судно с гидроволновым движителем по п.1, отличающееся тем, что для увеличения частоты вращения ротора электрогенератора с его валом соединен мультипликатор, а для регулировки частоты его вращения между ними установлено автономно управляемое регулирующее устройство.
16. Судно с гидроволновым движителем по п.1, отличающееся тем, что для регулировки частоты вращения ротора электрогенератора с ними связано регулирующее устройство, содержащее вариатор, состоящий из жестко закрепленных на параллельных полуосях дисков, обращенных друг к другу торцами, или конусов, обращенных друг к другу вершинами, у которых параллельные друг другу торцовые или боковые конические поверхности кинематически связаны между собой фрикционным роликом с конической или дуговой наружной поверхностью, для чего ролик установлен на оси между обращенных друг к другу поверхностей дисков или конусов с возможностью свободного вращения и принудительного сдвига по этой оси с помощью вилки с резьбовым отверстием, в которое веден ходовой винт с приводом от шагового электродвигателя.
17. Судно с гидроволновым движителем по п.1, отличающееся тем, что для уменьшения габаритов, занимаемых электрогенераторами, опорные ролики выполнены полыми, а внутрь их введены и закреплены статоры электрогенераторов, а концы валов роторов неподвижно связаны с опорной платформой для установки опорных роликов.
18. Судно с гидроволновым движителем по п.1, отличающееся тем, что для увеличения частоты вращения вала ротора электрогенератора на торце по периферии его статора или по периферии на торце опорного ролика закреплен зубчатый венец с внутренними зубьями, а на конце вала ротора закреплена шестерня, между которыми в зацепление введено паразитное зубчатое колесо, связанное осью с опорной платформой.
19. Судно с гидроволновым движителем по п.1, отличающееся тем, что для исключения реверса вращения вала ротора электрогенератора на торце по периферии его статора или по периферии на торце опорного ролика закреплен зубчатый венец с внутренними зубьями, с которыми введено в зацепление связанное своей осью с опорной платформой паразитное зубчатое колесо, а с ним введены в зацепление закрепленные друг за другом на валу ротора электрогенератора две обгонные муфты, связанные с шестернями, одна из которых непосредственно контактирует с указанным зубчатым колесом, а другая - через паразитную шестерню.
20. Судно с гидроволновым движителем по п.1, отличающееся тем, что для увеличения частоты вращения валов роторов электрогенераторов на торце по периферии его статора или по периферии на торце опорного ролика закреплен зубчатый венец с внутренними зубьями, с которым введено в зацепление планетарное зубчатое колесо, установленное с возможностью свободного вращения на водиле, имеющем индивидуальный привод с вращением от электродвигателя, закрепленного на размещенной на опорной платформе стойке, а с этим планетарным зубчатым колесом введена в зацепление закрепленная на конце вала ротора шестерня, которая является солнечной шестерней для зубчатого колеса, установленного на водиле.
21. Судно с гидроволновым движителем по п.1, отличающееся тем, что для увеличения частоты вращения валов роторов электрогенераторов на торце по периферии его статора или по периферии на торце опорного ролика закреплен зубчатый венец с внутренними зубьями, с которым введено в зацепление планетарное зубчатое колесо, установленное с возможностью свободного вращения на водиле, имеющем индивидуальный привод с вращением от электродвигателя, закрепленного на размещенной на опорной платформе стойке, а с этим планетарным зубчатым колесом введена в зацепление закрепленная на конце вала ротора шестерня, которая является солнечной шестерней для зубчатого колеса, установленного на водиле, а для регулировки частоты вращения вала ротора привод водила выполнен из электродвигателя постоянного тока или переменного тока с вариатором и управляющим им устройством с датчиком угла поворота опорного ролика.
22. Судно с гидроволновым движителем по п.1, отличающееся тем, что для увеличения частоты вращения валов роторов электрогенераторов на торце по периферии его статора или по периферии на торце опорного ролика закреплен зубчатый венец с внутренними зубьями, с которым введено в зацепление планетарное зубчатое колесо, установленное с возможностью свободного вращения на водиле, имеющем индивидуальный привод с вращением от шагового электродвигателя, закрепленного на стойке, связанной с опорной платформой, а с планетарным зубчатым колесом в блоке на одной оси закреплено второе зубчатое колесо, введенное в зацепление с закрепленной на вару ротора шестерней, солнечной для планетарного зубчатого колеса, установленного на водиле, а для исключения реверса вала ротора зубчатое колесо с внутренним зубчатым венцом первой половиной ширины своего зубчатого венца введено в зацепление с одной из двух связанных с осью планетарного блока обгонных муфт с зубчатыми венцами, а второй половиной ширины своего венца - с первой половиной ширины венца паразитной шестерни, которая второй половиной ширины своего венца введена в зацепление с зубчатым венцом второй обгонной муфты, а зубчатые венцы этих муфт адекватны зубчатому венцу меньшего колеса планетарного блока, полая ось которого установлена с возможностью свободного вращения на полуоси, связанной Г-образной или Т-образной боковой планкой с осью паразитной шестерни и полуосью водила.
23. Судно с гидроволновым движителем по п.1, отличающееся тем, что для исключения возможности продольного сдвига емкости с грузом и выхода ее радиусной опорной поверхности из контакта с поверхностью опорных роликов при резких ударах волн у обоих торцов этой поверхности выполнены конические фаски, имеющие радиусы кривизны в вертикальной плоскости от Rmax до Rmin, а с ними в контакт введены конические опорные ролики шириной b, меньший диаметр Dmin которых введен в контакт с радиусом Rmin, а больший диаметр Dmax - с радиусом Rmax, при соотношении этих диаметров Dmax/Dmin=2(Rmax/Rmin), а также с наклоном их оси на угол β, равный величине:
β = arcsin (√b2 +(Dmax - Dmin / 2)2 / Rmax - Rmin) + arctg (Dmax - Dmin / 2b).
24. Судно с гидроволновым движителем по п.1, отличающееся тем, что для регулировки частоты вращения валов роторов электрогенераторов вдоль оси на торцах опорных роликов, повернутых к среднему поперечному сечению груза, выполнены конические хвостовики диаметрами dmax, dmin и длиной l которых создан наклон боковой поверхности конуса параллельный опорной платформе, а с конусами введены в контакт фрикционные ролики, размещенные с возможностью свободного вращения в вилках и введенные в зацепление со шлицевыми валами, параллельными опорной платформе, а для продольного движения фрикционного ролика по шлицевому валу в вилке выполнено резьбовое отверстие, в которое введен параллельный шлицевому валу ходовой винт с индивидуальным приводом, а шлицевый вал соединительной муфтой связан с ротором электрогенератора напрямую или через устройство для исключения реверса его вращения, а для увеличения частоты вращения роторов электрогенераторов их валы связаны с мультипликаторами.
25. Судно с гидроволновым движителем по п.1, отличающееся тем, что для регулировки частоты вращения валов роторов электрогенераторов при уменьшении габаритов системы внутри вдоль оси опорных роликов выполнено коническое отверстие диаметрами dmax, dmin и длиной l которого создан наклон боковой поверхности конуса параллельный опорной платформе, а с этим конусом введен в контакт фрикционный ролик, размещенный с возможностью свободного вращения в вилке и введенный в зацепление с параллельным опорной платформе шлицевым валом, а для продольного движения по нему фрикционного ролика вилка имеет резьбовое отверстие, в которое введен параллельный шлицевому валу ходовой винт с индивидуальным приводом, а шлицевый вал соединительной муфтой связан с валом ротором электрогенератора напрямую или через промежуточное устройство для исключения реверса его вращения, а для увеличения частоты вращения роторов электрогенераторов его вал связан с мультипликатором.
| Устройство для использования энергии качки судна | 1983 |
|
SU1152882A1 |
| Устройство для использования энергии качки судна | 1985 |
|
SU1324925A2 |
| DE 3109446 A1, 09.12.1982 | |||
| US 6561856 B1, 13.05.2003. | |||

