Изобретение относится к области космического приборостроения, в частности к устройству технического зрения фасеточного типа, определяющему дистанционно позицию источника лучистого потока, например солнечному датчику космического аппарата. Оно может быть использовано и для других около и наземных целей, когда требуется знание позиции отдаленного источника лучистого потока мобильному объекту.
Общие основы пеленгации светил плоскостью известны и описаны, например, [Л.М. Воробьев, «Астрономическая навигация летательных аппаратов», издательство «Машиностроение», Москва 1968 г.]. Существующие в настоящее время средства, реализующие описанные методы пеленгации источников лучистого потока плоскостью, представляют собой те или иные аппаратные разновидности фасеточных устройств технического зрения, использующие в качестве детекторов излучения преимущественно полупроводниковые фотодиоды, у которых фронтально-плоская чувствительная поверхность.
Среди опубликованных патентов имеется патент на «Детектор углового положения оптического источника» [Патент RU 2399063, 16/12/2008]. Он при минимальном в нем числе фотодиодов - два в одномерном случае и четыре при двумерном варианте обзора пространства - обладает достаточно крутой крутизной угловой характеристики и относительно широким сектором (120°) приблизительной пеленгации оптического источника. Способ работы детектора - вычисление зависимости «DELTA/SIGMA», который представляет собой метод определения углового положения оптического источника в соответствии с его пеленгационной характеристикой в плоскости измерения: (А1-А2)/(А1+А2), где А1 и А2 - амплитуды сигналов фотодиодов. Это детектирующее устройство, как наиболее близкое из описанных технических средств определения позиции отдаленного источника лучистого потока, выбрано в качестве детектора-прототипа.
Общими признаками между патентуемым детектором позиции отдаленного источника лучистого потока и детектором-прототипом является наличие однотипных детектирующих элементов, которые имеют плоскую чувствительную поверхность, различное угловое и взаимное их расположение в устройстве, материал, из которого они сделаны, и их параметры, наличие электрических связей между ними, действий и порядок выполнения действий во времени над детектируемыми сигналами.
Недостатками детектора-прототипа следует считать ограниченный допустимой нелинейностью пеленгационной характеристики диапазон определения углового положения оптического источника в 120°, наличие в его составе вычислительного блока, а также оптических компонентов - прозрачных рассеивающих пластин и непроницаемых светом перегородок, расположенных между фотодиодами. Главные факторы этих недостатков - предельно малое число использованных в нем фотодиодов, избыточное количество иных элементов, которые сужают спектральный диапазон его использования и ухудшают бюджетные параметры детектора-прототипа.
Цель изобретения - улучшение параметров детектора позиции отдаленного источника лучистого потока, а именно: расширение поля обзора, повышение линейности пеленгационной характеристики, улучшение параметров бюджета за счет снижения массы, объема и электропотребления, что актуально при решении задачи приблизительной пеленгации источника излучения плоскостью в пределах полусферы или даже окружающей его сферы в реальном масштабе времени. При этом предпочтительно, чтобы патентуемое устройство, если надо, могло бы быть полностью автономным от мобильного объекта, за исключением его размещения.
Известно, что необходимым условием, когда детекторы позиции отдаленного источника лучистого потока при регистрации угловых координат, например Солнца, должны определять его положение в большом угловом поле - полусфера или даже полная сфера - является решение задачи, чтобы оно реализовывало в первую очередь выполнение основных требований его детекторной пеленгационной характеристики:
1. как функция она должна быть нечетно-симметричной;
2. вблизи нулевого пеленга ее уровень должен стремиться к нулевому своему значению;
3. уровень не должен зависеть от интенсивности входного потока и от параметров детектора позиции отдаленного источника лучистого потока;
4. она должна иметь максимальный угловой рабочий диапазон;
5. ее крутизна должна стремиться к максимуму.
Достижение патентуемым устройством поставленной цели осуществляется в нем за счет минимизации аппаратных элементов, его реализующих, но при обязательном использовании функциональных возможностей встречных склонов апертурных характеристик, по меньшей мере, трех диодов, ориентированных своими чувствительными поверхностями и взаимно-сдвинутых на 90 градусов, каждый вдоль одной координатной оси детектора.
Детектор позиции отдаленного источника лучистого потока в реальном масштабе времени при случайно изменяющейся взаимной ориентации источника излучения и твердотельного мобильного объекта, где он установлен, определяет угловую позицию лучистого источника относительно его приборной базы, представленной прямоугольной системой координат. В нем использовано минимально-необходимое число дискретных пассивных полупроводниковых детекторов излучения, которые обозревают предельно-возможное окружающее пространство - полусферу или даже полную сферу, и обычных электронных компонент. Он имеет простую по форме кубическую конструкцию, не содержит отдельный вычислительный блок и оптические компоненты - линзы, зеркала, светонепроницаемые перегородки и рассеивающие пластины, которые ограничивают области его использования в коротковолновой части электромагнитного спектра и ухудшают бюджетные параметры детектора.
Суть способа определения позиции отдаленного источника лучистого потока - использование функциональных возможностей встречных склонов апертурных характеристик трех последовательно ортогонально-ориентированных пассивных детекторов преимущественно с фронтально-ориентированных пассивных детекторов преимущественно с фронтально-плоской чувствительной поверхностью, когда только их токи определяют позицию источника лучистого потока. Способ по своим действиям относительно прост:
- изначально преобразуют, как минимум, тремя пассивными детекторами - центральный осевой фотодиод, плюс два боковых дополнительных фотодиода, составляющие потока источника излучения в пропорциональные им электротоки;
- далее определяют (описывают) преобразователем «аналог-цифра» позицию отдаленного источника лучистого потока, через отношение зарегистрированных значений токов одного из дополнительных диодов и суммой токов всех трех диодов, от которых истекают в момент регистрации ими потока излучения только два электротока.
При этом дополнительные фотодиоды в устройстве ориентированы так, чтобы их оптические оси были перпендикулярны оси центрального осевого диода, которому они приданы, и направлены в противоположные стороны вдоль одной из координатной оси устройства.
Электрические токи фотодиодов часто преобразуют в амплитуды напряжений преобразователями «ток - напряжение» и сумматором формируют их общую сумму амплитуд напряжений, которую используют в качестве опоры - масштабный фактор, необходимой для определения углового положения излучателя преобразователем «аналог-цифра». Преобразователь «аналог-цифра» в устройстве выполняет функцию измерителя отношения двух внешних амплитуд напряжений - позиционного и опорного.
Для этого преобразователю «аналог-цифра» на входы подают внешние напряжения (позиционный и опорный сигналы), поступающие как исходные сочетания токов детекторов, а на его выходе имеют результаты (обычно в виде двоичного цифрового кода) позиции отдаленного источника лучистого потока без специального вычислителя или компьютера мобильного объекта.
Таким образом, фактически тремя ортогонально-ориентированными пассивными диодами и одним активным функциональным элементом - преобразователь «аналог-цифра», реализуют базовый вариант построения устройства дистанционного зондирования позиции отдаленного источника лучистого потока, у которого по отношению к детектору-прототипу увеличивается его надежность и живучесть, минимизируется угловая погрешность измерения, улучшаются бюджетные параметры за счет уменьшения массы, объема и электропотребления, расширяются области применения в направлении определения позиций источников ультрафиолетового и рентгеновского излучений, появляется возможность создания автономного детектора позиции отдаленного источника лучистого потока.
Сравнение изложенных подходов и приемов не только с прототипом, но и с другими техническими возможностями и средствами по части реализации ими устройств дистанционного зондирования позиций источников лучистого потока не позволило выявить в них признаки, аналогичные патентуемым решениям, и, следовательно, можно считать их существенными.
Далее продукты изобретения - устройство и способ - описываются и поясняются с использованием ряда рисунков и фигур, которые следует рассматривать как демонстрирующие материалы частного случая их выполнения. Для этого ниже изображено:
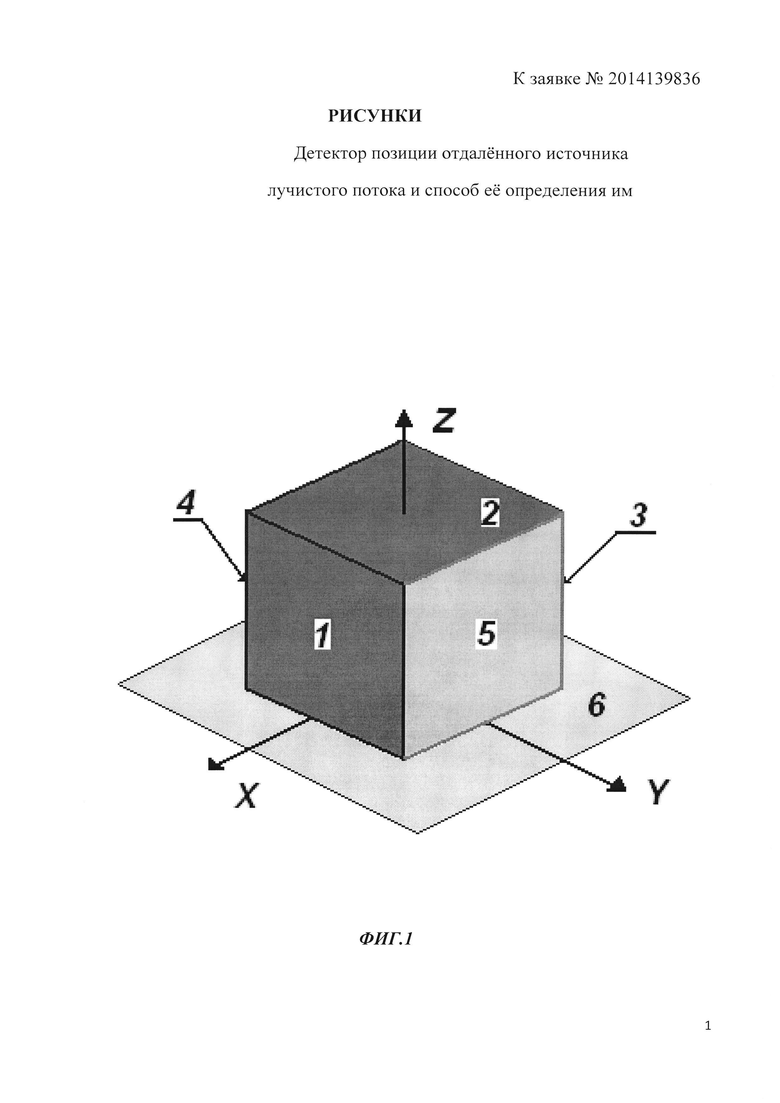
На фиг. 1 - общий вид моноблочного детектора позиции отдаленного источника лучистого потока.
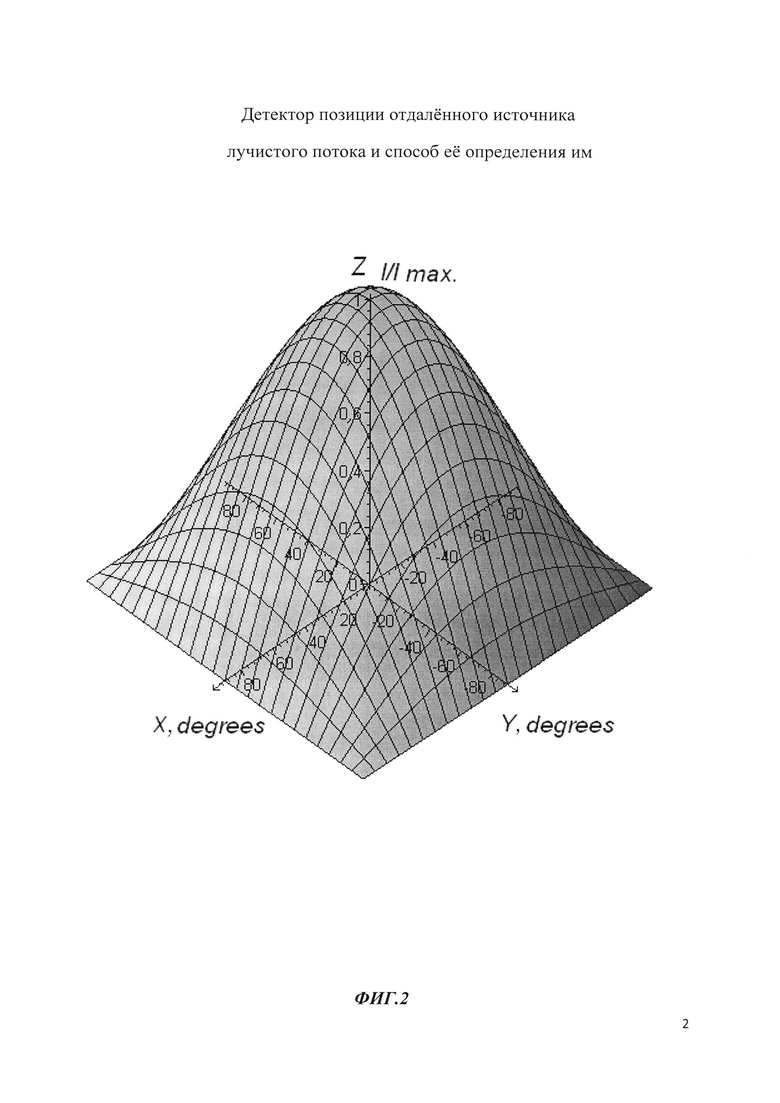
На фиг. 2 - апертурная характеристика тока квадратного по площади диода, преимущественно с фронтально-плоской чувствительной поверхностью, в прямоугольной системе координат устройства.
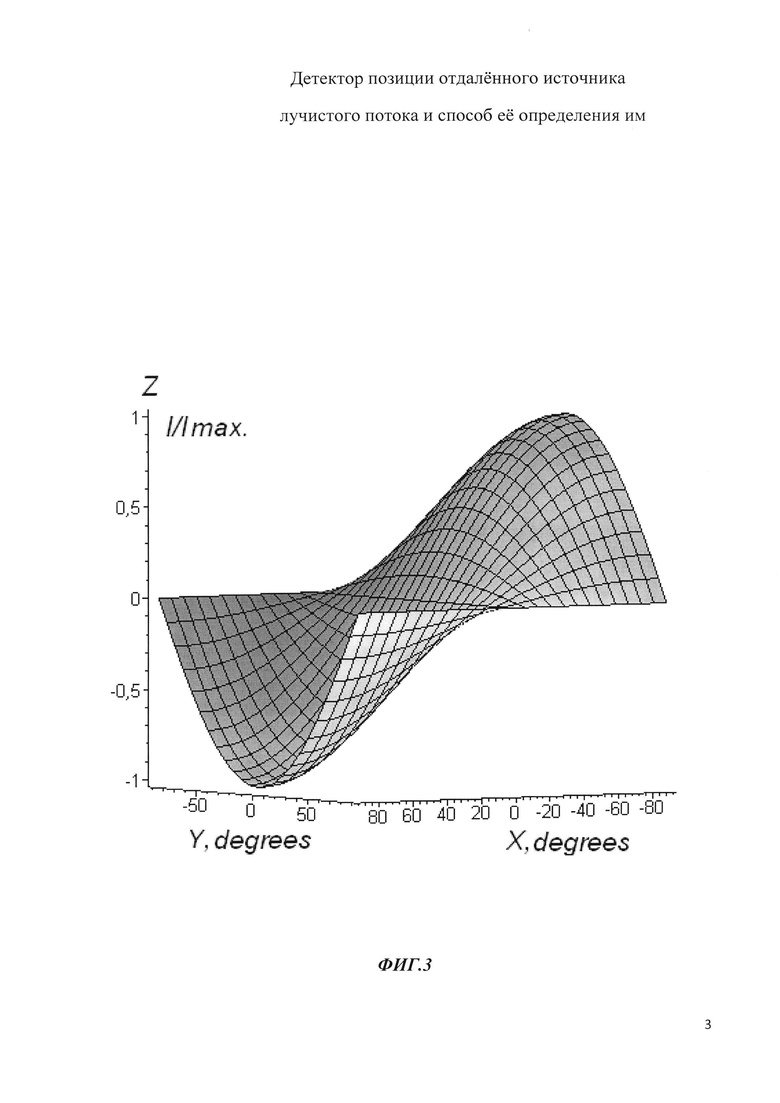
На фиг. 3 - апертурная характеристика токов двух разнополярно включенных диодов с противоположной ориентацией их чувствительных поверхностей вдоль оси X.
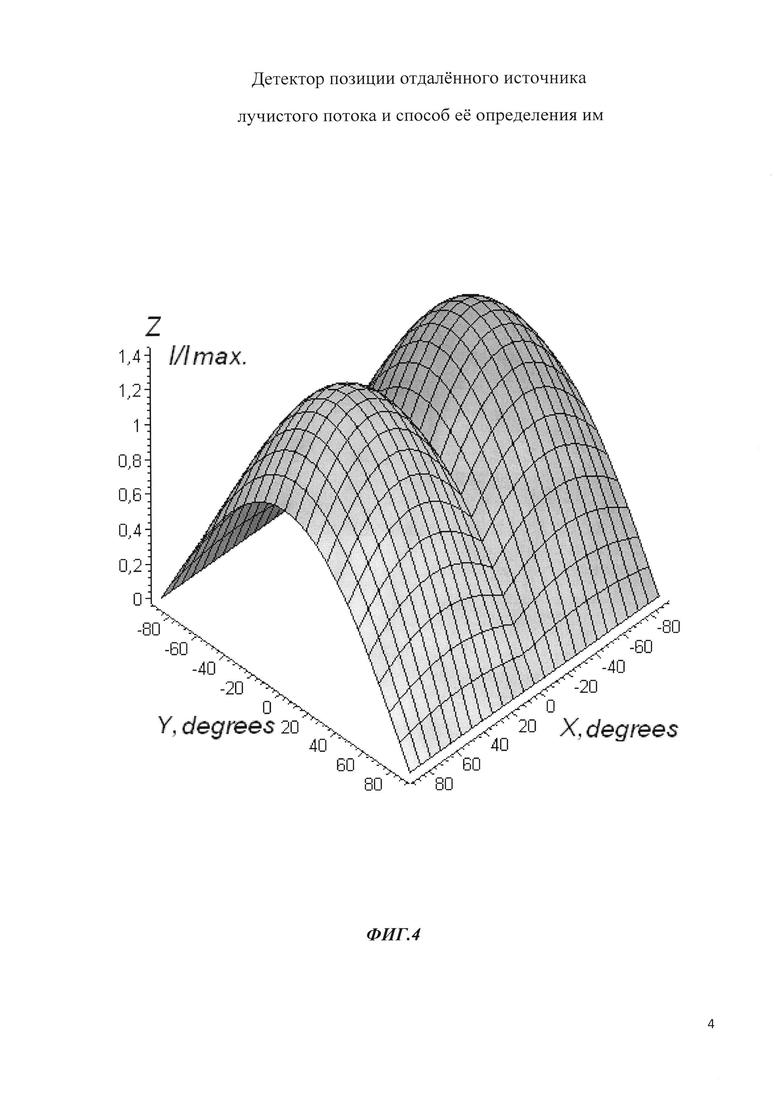
На фиг. 4 - апертурная характеристика «масштабного фактора» базового варианта патентуемого изделия по оси X в прямоугольной системе координат.
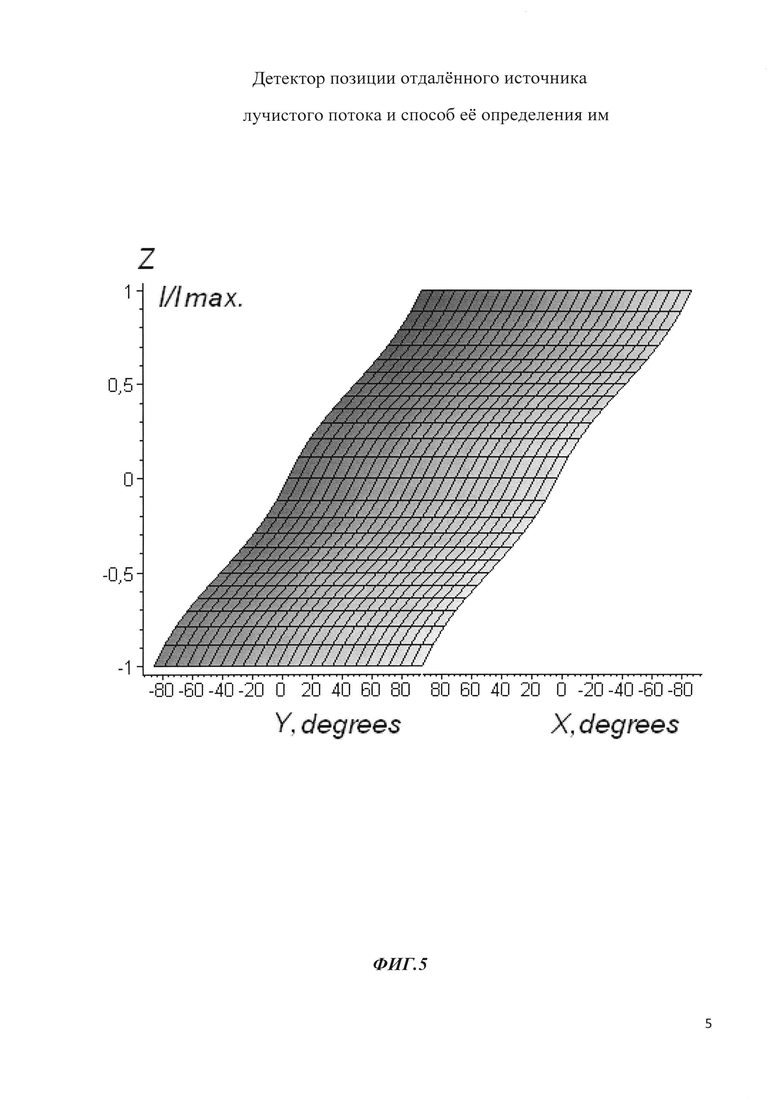
На фиг. 5 - пеленгационная характеристика детектора позиции отдаленного источника лучистого потока по оси X.
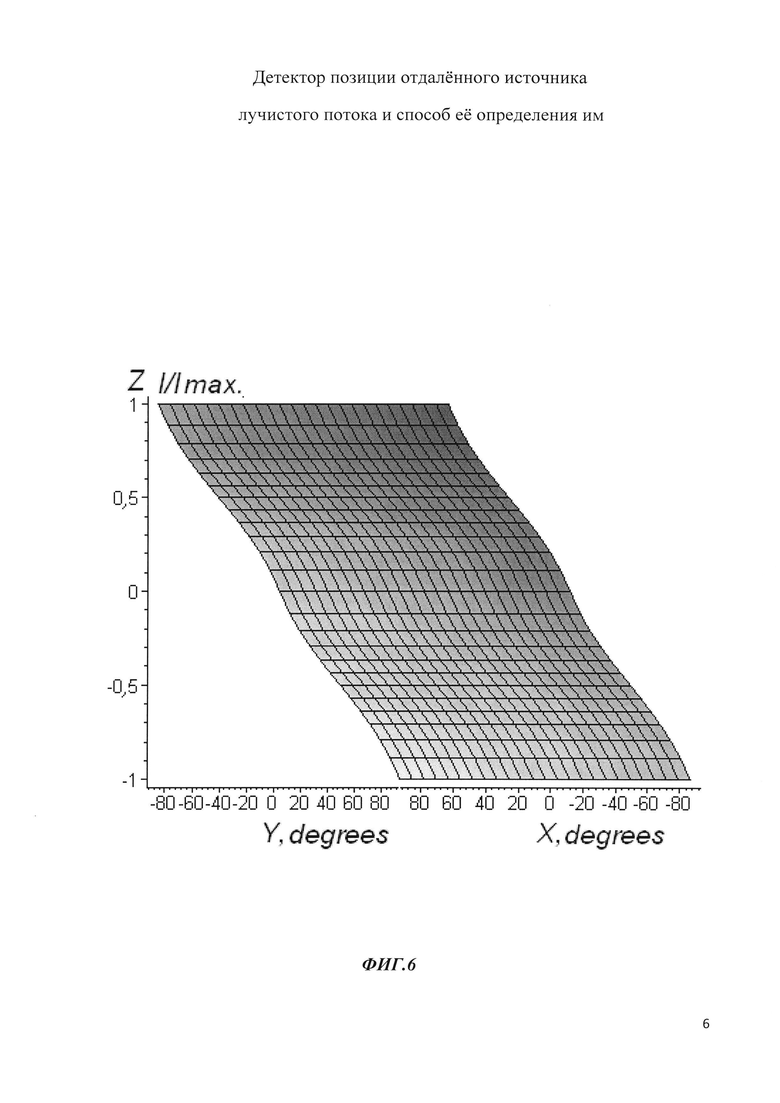
На фиг. 6 - пеленгационная характеристика детектора позиции отдаленного источника лучистого потока по оси Y.
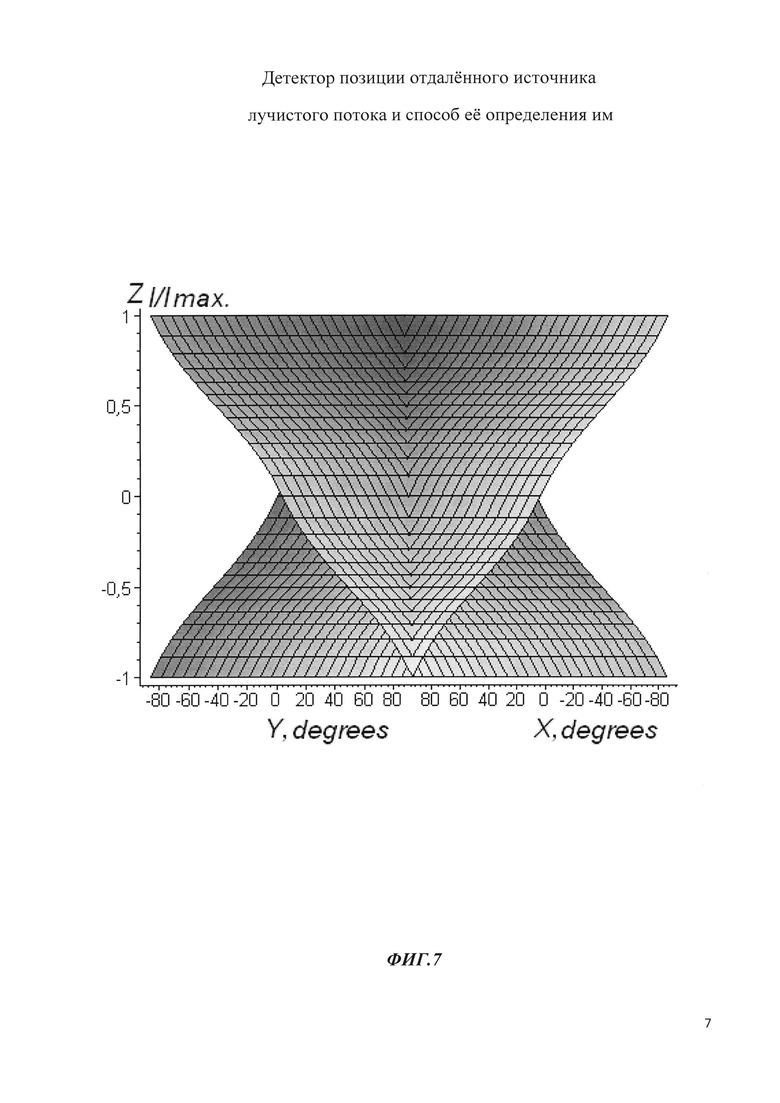
На фиг. 7 - пеленгационные характеристики двухосного детектора позиции отдаленного источника лучистого потока в прямоугольной системе координат патентуемого продукта.
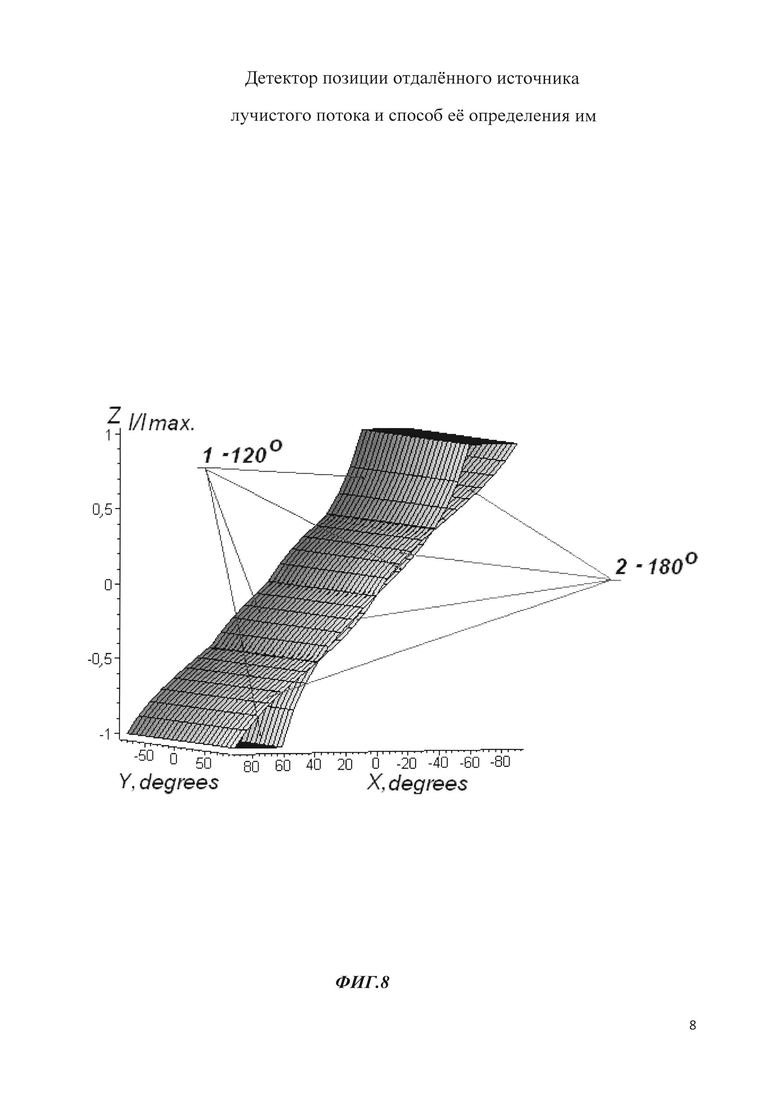
На фиг. 8 показано отличие пеленгационных характеристик двух детекторов по оси X, взятого за прототип - 1 (обзор 120°) и патентуемого устройства - 2 (обзор 180°).
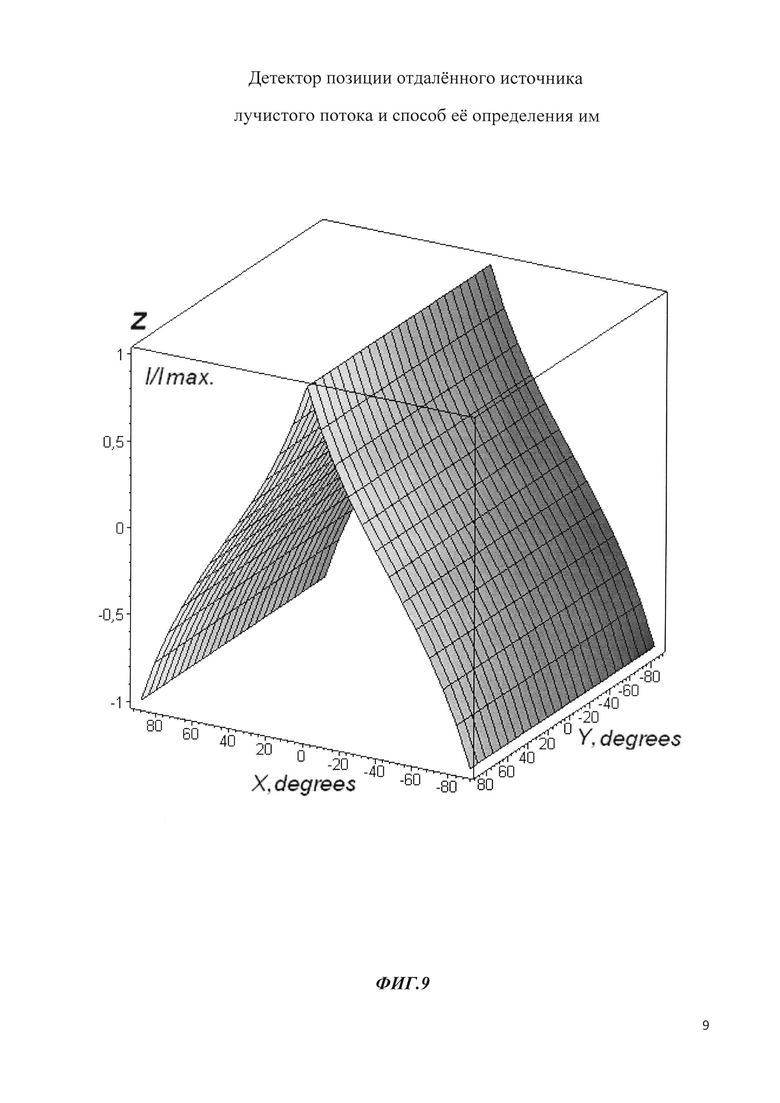
На фиг. 9 - вид угловой характеристики детектора позиции отдаленного источника лучистого потока по оси X, которая имеет удвоенную чувствительность.
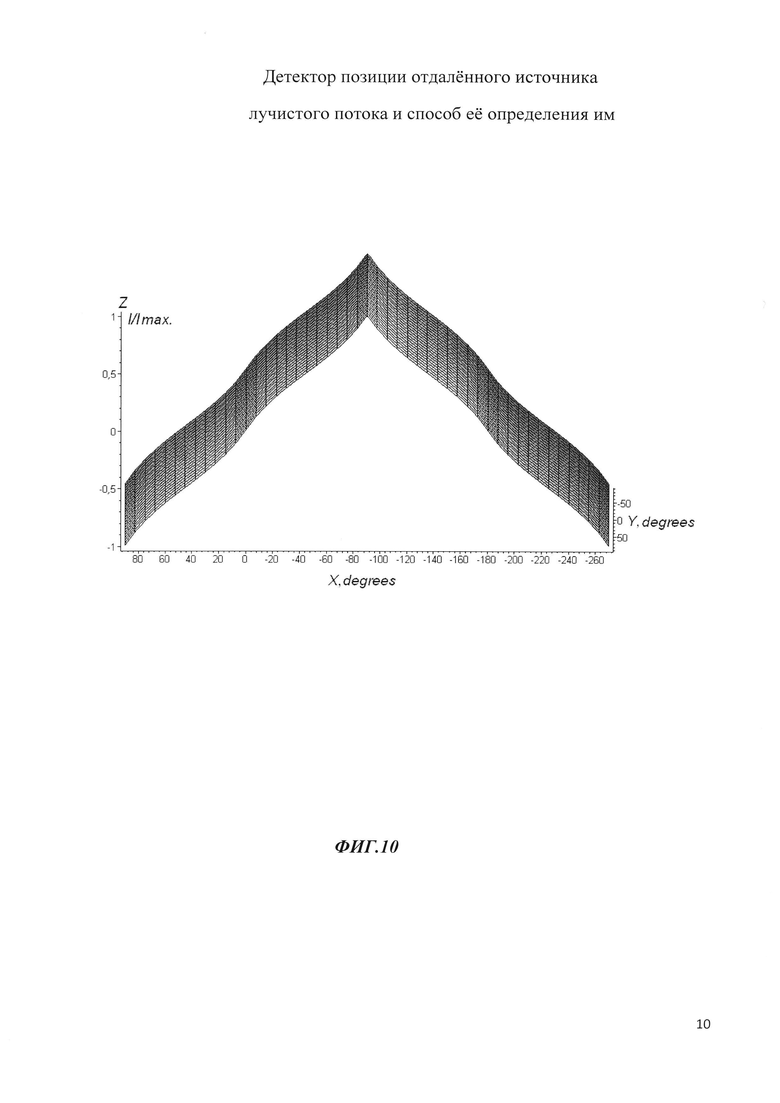
На фиг. 10 - пеленгационная характеристика устройства по оси X в пределах углового обзора в 360° одноосного детектора позиции отдаленного источника лучистого потока.
В базовом варианте построения детектора позиции отдаленного источника лучистого потока - одномерное детектирующее устройство - это моноблочная кубическая конструкция, которая включает в себя основание в виде одной грани полого куба, трех квадратных по форме фотодиодов: основной сверху и два дополнительных по бокам, при этом другие боковые торцы куба закрыты заглушками от света.
В двухосном варианте построения детектора позиции отдаленного источника лучистого потока - двухмерное детектирующее устройство - все грани куба - боковые и верхняя грань - представлены детекторами (пять фотодиодов). В обоих вариантах построения продукта в полости его куба физически размещается электроника, например преобразователи, инвертор и сумматор сигналов.
В отличие от одномерного патентуемого устройства, второй вариант его реализации выполнен с возможностью определения углового положения излучающего источника в двух перпендикулярных плоскостях, например, его азимута и высоты, но при наличии в нем пяти, а не шести фотодиодов, как в случае, например, использования для этого двух раздельных одномерных устройств, и в этом одно из его преимуществ.
Фигура 1 демонстрирует общий вид детектора позиции отдаленного источника лучистого потока, выполненного в виде куба, размещенного на фундаментальной плоскости 6 твердотельного мобильного объекта. Здесь одномерный вариант устройства - функциональная основа продукта - содержит три фотодиода 1-3, фиксированных на гранях полого куба. Вэтом варианте построения две другие его грани 5, 6 закрыты защитными крышками, а внутри размещается вся электроника детектора позиции отдаленного источника излучения. В двухмерном варианте построения устройства все грани куба, кроме нижней грани, лежащей на фундаментальной плоскости объекта 6, это фотодиоды 1-5. X, Y и Z - оси координатной базы продукта.
В качестве детектирующих элементов в патентуемом устройстве используются предпочтительно квадратные по форме пассивные полупроводниковые фотоэлектрические преобразователи - диоды с косинусными угловыми характеристиками, имеющими преимущественно одностороннюю фронтально-плоскую чувствительную поверхность. Предпочтительно, чтобы эти фотодиоды функционировали в нем как генераторы тока - режим «короткого замыкания» преобразователя излучения. Именно такой подход позволяет реализовывать отмеченные выше требования пеленгационной характеристики устройства. Кроме того, только диоды в режиме «короткого замыкания» обычно обеспечивает высокую температурную стабильность его работы и необходимое быстродействие устройства, но при соответствующем выборе скорости преобразователя «аналог-цифра».
На фигуре 2 изображена нормированная апертурная характеристика тока квадратного диода с фронтально-плоской чувствительной поверхностью, представленная в прямоугольной системе координат XYZ устройства, где Z - оптическая ось детектора, относительно которой (фиг. 2) видно, что она, как функция, четно-симметричная по всем направлениям.
Для детектора позиции отдаленного источника лучистого потока значение электрического тока диода, в зависимости от угла падения на его чувствительную поверхность излучения, предпочтительно иметь в виде мультипликативной смеси, когда соблюдается пропорциональность между током и лучистым потоком:
I(xy)=Es*A*N*cos(x)*cos(y), где
Es - Облученность (Вт/м2) - солнечная постоянная;
А - Фотоэлектрический параметр детектора, равный - J*S*D2;
J - Квантовая эффективность детектора;
S - Крутизна при нормальном падении на детектор лучистого потока, которая соответствует его токовой чувствительности (А/Вт);
D - Длина квадратной грани диодной матрицы (м);
N - Число детекторов в матрице;
cos(х) и cos(y) - Функции зависимостей величин интенсивностей излучений по координатам Х и Y.
Выражение I(xy) для тока диода в детекторах позиции соблюдается только тогда, когда там нет аддитивных составляющих или они ничтожно малы в самих членах мультипликативной смеси, порождаемых общим лучистым фоном или «темновым» током диода, если он имеется. Это вполне реально на современном этапе технологического развития арсенала средств по изготовлению и использованию пассивных фотовольтаических диодов, например солнечно-слепых пассивных детекторов излучений, создаваемых на основе «широкозонных» полупроводниковых структур.
Следует особо отметить, что для решения ряда прикладных задач пеленгации излучающих источников крайне предпочтительны также и матричные солнечные элементы в качестве детекторов излучений, которые освоены и производятся в России [Д.С. Стребков, «Матричные солнечные элементы», ФГУП «Типография» Россельхозакадемии, Москва 2010 г.]. Использование матричных солнечных элементов в детекторе позиции отдаленного источника лучистого потока позволяет исключить в нем активные преобразователи «ток-напряжение», применяя, например, для этого пассивные резисторы, что еще более упрощает детектирующее устройство, а также повышает экономичность, надежность и радиационную стойкость в целом, расширяет сферу применения патентуемого продукта.
В принципе, для формирования пеленгационной характеристики детектора-прототипа вдоль одной из его координатных осей действительно достаточно иметь два фотодиода с плоскими чувствительными поверхностями, которые взаимно и противоположно сдвинуты относительно оптической оси устройства на равные углы, но этот их сдвиг разумен до угловой величины плюс/минус 45°, когда нелинейности апертурных характеристик фотодиодов еще мало влияют на конечные результаты детектора. Однако применение «DELTA/SIGMA» способа определения позиции источника излучения, при наличии в нем всего двух фотодиодов, еще допускает пеленгацию светового излучателя в угловом секторе до 120°, несмотря на большую при этом угловую погрешность измерений, что и сделано в выбранном детекторе-прототипе.
Его недостаток очевиден. Да, он позволяет формировать приблизительную пеленгационную характеристику устройства, но форма ее нелинейности у детектора-прототипа, исходя из способа ее формирования при обзоре в 120°, уже сильно аномальна к концам этого диапазона. Минимум влияния формы нелинейности на конечный результат измерений будет только в том случае, если перегибы характеристики симметричны относительно «идеальной» плоскости пеленгации, и они пересекают ее. Возможности указанного способа при диапазоне обзора более 90° ограничиваются именно конечной величиной аномалии формы нелинейности пеленгационной характеристики устройства относительно ее «идеальной» плоскости и в этом его недостаток.
Чтобы преодолеть недостаток детектора-прототипа в патентуемом детекторе позиции используются три диода - центральный (базовый) элемент 2 и два боковых детектирующих элемента 1, 3 (фиг. 1), которые ориентируются по отношению к чувствительной поверхности диода 2 перпендикулярно и противоположно вдоль координатной оси, где он фиксирован.
Следует заметить, что противоположная взаимная ориентация двух сдвинутых на 180° и разнополярно-включенных «плоских» диодов позволяют в принципе определять направление на источник излучения в пределах обозреваемой полусферы по одной из осей детектора позиции отдаленного источника лучистого потока (фиг. 3). Однако нелинейность апертурной характеристики такого образования в нем будет более существенна по своему значению, чем у детектора-прототипа.
Этого недостатка нет в детекторе позиции отдаленного источника лучистого потока, когда способ определения ее позиции им описывается как: (I1-I3)/(I1+I2+I3). Здесь ток I1 или минус I3 - токи фотодиодов, ориентированные своими чувствительными поверхностями в одной плоскости, но в противоположных направлениях, I2 - ток центрального (базового) преобразователя излучения. Знак минус в числителе указывает не на разность величин двух токов, а на инверсное направление истечения электротока I3 фотодиода (см. фиг. 3).
Отличие патентуемого способа от метода вычисления углового положения у детектора-прототипа, состоит в том, что знаменатель отношения включает сумму токов трех фотодиодов, из которых, на момент пеленгации падающего лучистого потока источника, обычно истекают токи от двух фотодиодов: базового и бокового детектирующих элементов. Числитель отношения имеет фактически ток только от одного бокового фотодиода, так как в это время другой боковой фотодиод будет всегда находиться в тени и от него нет электротока. В этом случае отношением величин фактически одного электротока в числителе и суммы двух токов в знаменателе определяют позицию отдаленного источника лучистого потока, а знак инверсного значения электрического тока в числителе является по существу признаком противоположного направления падающего на фотодиод излучения.
Фигура 4 демонстрирует апертурную характеристику знаменателя указанного выше отношения, а фигуры 5 и 6 - пеленгационные характеристики патентуемого устройства - по осям X и Y.
Фигурой 7. обрисованы две пеленгационные характеристики детектора позиции отдаленного источника лучистого потока, расположенные в двухосной прямоугольной системе координат устройства, а фигура 8 показывает отличие пеленгационных характеристик двух детекторов: взятого за прототип - 1 (обзор 120°) и детектора позиции источника лучистого потока - 2 (обзор 180°).
Из приведенного рисунка (фиг. 8) видно, что достигнутая нелинейность пеленгационной характеристики патентуемого устройства в угловом обзорном диапазоне 180° меньше, чем у детектора-прототипа с сектором обзора в 120°, и в пределах однозначного доверительного интервала погрешности измерения углов соизмерима с его нелинейностью для варианта построения детектора-прототипа с угловым диапазоном 90°.
Итак, вышеизложенный материал и рисунки (фиг. 1-8) показывают, что детектор позиции отдаленного источника лучистого потока и патентуемый способ ее определения им реализуют получение пеленгационной характеристики в пределах углового диапазона 180°, которая по величине нелинейности аналогична случаю построения детектора-прототипа с угловым обзорным диапазоном 90°. Это заведомо меньше, чем при секторе обзора детектора-прототипа в 120°. Полученный результат в патентуемом устройстве достигнут как за счет использования трех диодов, имеющих косинусные апертурные характеристики, так и их иной угловой ориентации, из которых в любой момент времени работают только два, а третий находится в это время в тени, вместо двух постоянно облучаемых фотодиодов, как это имеет место в детекторе-прототипе.
Неоспоримо утверждение автора детектора-прототипа, что точность измерения угла зависит от чувствительности (крутизны) угловой характеристики устройства, и чем она больше, тем выше точность измерения. В этом плане, при наличии все тех же электронных компонент, в патентуемом устройстве для определения только угловой позиции лучистого источника в пределах одного квадранта предпочтительно использование другого способа, который позволяет увеличить в два раза чувствительность угловой характеристики фасеточного детектора позиции источника лучистого потока. Выражение для этого способа определения им позиции выглядит как:
[I2-(I1+I3)]/(I1+I2+I3).
Фигура 9 в визуальной форме демонстрирует угловую характеристику такого устройства, а ее сравнение с характеристикой на фигуре 5 позволяет видеть, что крутизна характеристики детектора позиции в пределах одного квадранта действительно в два раза больше, чем у предыдущего способа ее определения. Правда, при этом, угловая характеристика здесь имеет несколько иную форму, у которой отсутствует признак о направлении падающего излучения из-за ее угловой симметрии относительно оптической оси устройства. Это плата за увеличение чувствительности.
Далее дается описание и обрисовка возможностей построения еще двух предпочтительных разновидностей детекторов позиции отдаленного источника лучистого потока.
Первая его разновидность - это устройство с обзором всей окружающей сферы.
Такой детектор позиции отдаленного источника лучистого потока материально реализуется тогда, когда фундаментальная посадочная плоскость мобильного объекта прозрачна для падающего излучения, а основание полого куба в моноблочном варианте построения детектора позиции лучистого источника содержит шестой фотодиод, имеющий электрическое и однополярное параллельное соединение с центральным осевым диодом, или эта посадочная плоскость находится внутри самого мобильного объекта, который имеет шесть ортогонально-ориентированных между собой внешних граней. В этом случае, по своей сути, набор пассивных детектирующих элементов устройства конструктивно будет представлять собой распределенную систему, у которой ее фотодиоды вынесены и фиксированы на всех внешних гранях твердотельного мобильного объекта, например, грани «CubeSat» или другого прямоугольного, но шестигранного спутника, а электроника детектора позиции отдаленного источника лучистого потока размещена непосредственно внутри его конструкции.
Работа такого детектора позиции отдаленного источника лучистого потока аналогична изложенному выше базовому способу определения ее позиции им, описывается как: (I1-I3)/(I1+I2+I6+I3),
и отличается от него только отсутствием тока от одного из двух параллельно включенных диодов I2 или I6, один из которых в этот момент видит лучистый источник, а другой - не освещен им, так как находится на теневой стороне мобильного объекта и, следовательно, не оказывает влияния на результаты, получаемые детектором позиции отдаленного источника лучистого потока.
Вторая разновидность устройства - вариант, когда требуется автономный детектор позиции отдаленного источника лучистого потока.
Для этого устройству достаточно иметь у себя малую солнечную батарею, последовательные звенья которой размещаются под его «прозрачными» фотодиодами, а вместе они образуют вертикальное каскадное образование - тандем, состоящий из двух функциональных элементов - фотодиоды детектора позиции отдаленного источника лучистого потока и вольтаические элементы источника его электрического питания, которые функционируют в разных зонах солнечного спектра.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИНТЕЗИРОВАНИЯ ПОЛОЖЕННОЙ ОТНОСИТЕЛЬНОЙ ПЕЛЕНГАЦИОННОЙ ХАРАКТЕРИСТИКИ СТАТИЧЕСКОГО АМПЛИТУДНОГО ДАТЧИКА ФАСЕТОЧНОГО ТИПА ОТДАЛЁННОГО ИСТОЧНИКА ЛУЧИСТОГО ПОТОКА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2016 |
|
RU2610135C2 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ АПЕРТУРНОЙ ХАРАКТЕРИСТИКИ ДАТЧИКА УГЛОВОЙ ПОЗИЦИИ ОТДАЛЁННОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ | 2015 |
|
RU2602399C1 |
| Способ и устройство коррекции нелинейности характеристики фотоэлектрического пеленгатора отдалённого источника электромагнитной энергии в пределах обзорного развёрнутого угла | 2016 |
|
RU2631834C2 |
| УСТРОЙСТВО ГЛАЗКОВА ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ИСТОЧНИКА СВЕТА И СПОСОБ ГЛАЗКОВА ЕГО РАБОТЫ | 2013 |
|
RU2526218C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЭПИЦЕНТРА ОЖИДАЕМОГО ЗЕМЛЕТРЯСЕНИЯ | 2000 |
|
RU2172968C1 |
| ДЕТЕКТОР УГЛОВОГО ПОЛОЖЕНИЯ ОПТИЧЕСКОГО ИСТОЧНИКА | 2008 |
|
RU2399063C1 |
| СПОСОБ И УСТРОЙСТВО ПЕЛЕНГАЦИИ ТОЧЕЧНОГО ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2008 |
|
RU2393496C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЭПИЦЕНТРА ОЖИДАЕМОГО ЗЕМЛЕТРЯСЕНИЯ | 1999 |
|
RU2149427C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ | 2018 |
|
RU2669385C1 |
| УСТРОЙСТВО ПЕЛЕНГАЦИИ ТОЧЕЧНОГО ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2008 |
|
RU2390790C2 |
Детектор позиции отдаленного источника лучистого потока включает в себя фотодиоды, которые разнонаправлено ориентированы, имеют плоские чувствительные поверхности. Фотодиоды расположены на внешних гранях куба и преобразуют падающие на них лучи в электротоки, которые передаются на преобразователи «ток-напряжение», сумматор, формирующий опорный сигнал, и инвертор напряжений. Дополнительно детектор содержит преобразователь «аналог-цифра», преобразующий сочетания амплитуд сигналов в цифровой код, являющийся результатом позиции отдаленного источника лучистого потока в виде пеленгационной характеристики. При этом электроника и активные компоненты детектора размещены во внутренней полости куба. Технический результат заключается в расширении поля обзора, повышении линейности пеленгационной характеристики, уменьшении массы, объёма и электропотребления. 2 н. и 7 з.п. ф-лы, 10 ил.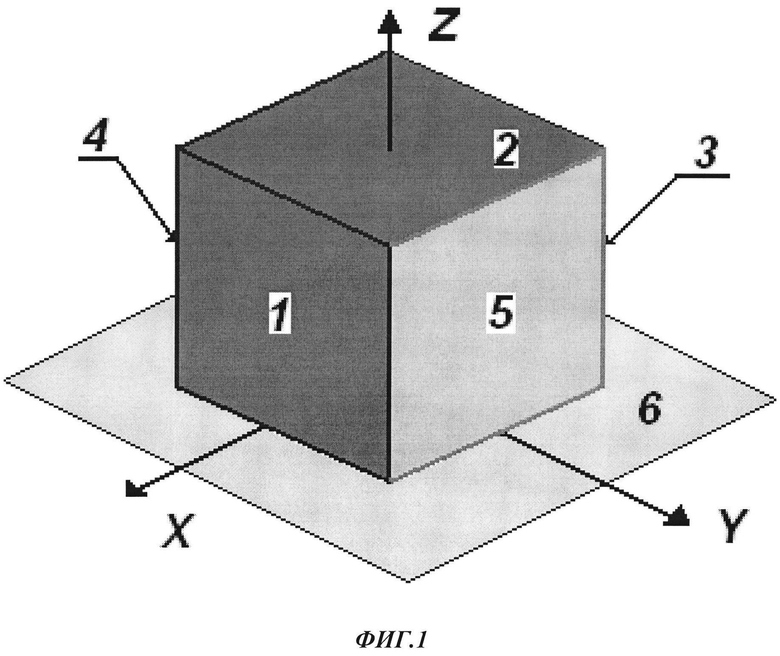
1. Детектор позиции отдаленного источника лучистого потока,
который включает
фотодиоды, которые разнонаправлено ориентированы и фиксированы плоскими чувствительными поверхностями на гранях устройства в направлении сторон углового обзора, отличающийся тем, что
фотодиоды выполнены с фронтально-плоской чувствительной поверхностью, линейные размеры сторон которой одинаковы, а апертурная характеристика описывается законом косинуса,
фотодиоды расположены на внешних гранях куба и преобразуют падающие на них лучи в электротоки, которые передаются на преобразователи «ток-напряжение», сумматор, формирующий опорный сигнал, и инвертор напряжений,
дополнительно детектор содержит преобразователь «аналог-цифра», преобразующий сочетания амплитуд сигналов в цифровой код, являющийся результатом позиции отдаленного источника лучистого потока в виде пеленгационной характеристики, при этом электроника и активные компоненты детектора размещены во внутренней полости куба.
2. Детектор по п. 1, отличающийся тем, что
фотодиоды расположены на трех внешних гранях куба и ориентированы чувствительными поверхностями в направлении сторон наружного обзора вдоль одной из его координатных осей, боковые грани куба закрыты светонепроницаемыми крышками, а шестая грань куба фиксирована на фундаментальной посадочной плоскости мобильного объекта.
3. Детектор по п. 1, отличающийся тем, что
фотодиоды расположены на пяти внешних гранях куба, чувствительные поверхности которых обращены в направлении сторон наружного обзора, а шестая грань куба крепится к фундаментальной посадочной плоскости мобильного объекта.
4. Детектор по п. 1, отличающийся тем, что фотодиоды расположены на шести гранях полого куба.
5. Детектор по любому из пп. 1, 3, 4, 5, отличающийся тем, что
под фотодиодами расположены и фиксированы фотоэлементы солнечной батареи, подключенной как источник питания к электрической схеме детектора позиции.
6. Способ определения детектором позиции отдаленного источника лучистого потока, заключающийся в том, что
составляющие падающего на него лучистого потока источника при помощи фотодиодов, выполненных с фронтально-плоской чувствительной поверхностью, линейные размеры сторон которой одинаковы, а апертурная характеристика описывается законом косинуса, преобразуют в пропорциональные электрические токи, токи преобразуют в амплитуды напряжений, формируют сигнал опорного напряжения,
подают полученные напряжения на преобразователь «аналог-цифра», который выполняет функцию измерителя отношения амплитуд напряжений и опорного напряжения,
а на выходе получают оцифрованный результат позиции отдаленного источника лучистого потока в виде пеленгационной характеристики источника лучистого потока.
7. Способ по п. 7, отличающийся тем, что, детектором позиции отдаленного источника лучистого потока реализуют пеленгационную характеристику вида: (I1-I3)/(I1+I2+I3), где I1 или минус I3 - токи фотодиодов, ориентированных чувствительными поверхностями в одной плоскости, но в противоположных направлениях и перпендикулярных центральному осевому преобразователю, a I2 - ток центрального осевого фотодиода.
8. Способ по п. 7, отличающийся тем, что детектором позиции отдаленного источника лучистого потока реализуют апертурную характеристику вида: [I2-(I1+I3)]/(I1+I2+I3), где I1, I2 и I3 - соответствующие токи фотодиодов.
9. Способ по п. 7, отличающийся тем, что детектором позиции отдаленного источника лучистого потока реализуют пеленгационную характеристику вида: (I1-I3)/(I1+I2+I6+I3), где I6 - электроток фотодиода, расположенного на нижней грани куба.
| US 3059120 А 16.10.1962 | |||
| US 4987293 A1 22.01.1991 | |||
| ДЕТЕКТОР УГЛОВОГО ПОЛОЖЕНИЯ ОПТИЧЕСКОГО ИСТОЧНИКА | 2008 |
|
RU2399063C1 |
| US 20090121925 A1 14.05.2009. | |||

