Изобретение относится к области аэрокосмического приборостроения и касается дальнейшего совершенствования измерительных средств дистанционного зондирования позиции отдаленного источника лучистого потока, а именно статических амплитудных датчиков фасеточного типа - пассивный фотоэлектрический пеленгатор, участвующих в решении задач навигации, ориентации, стабилизации и контроля положения мобильных объектов по энергетическому центру Солнца или другого отдаленного источника иной интенсивности.
В природной среде и фотонной измерительной технике фасеточное зрение играет доминирующую роль при решении задач навигации, ориентации, стабилизации мобильных объектов в окружающем их пространстве в силу широких его возможностей. Поэтому в аэрокосмической отрасли при создании инновационных продуктов технического зрения, а именно статических амплитудных датчиков фасеточного типа, решающих подобные задачи, предпочтительно следует идти по апробированному природой многовековому пути. Он заранее гарантирует им возможности дальнейшего совершенствования, качественного роста и миниатюризации, осталось только их выявить и в нужном направлении использовать.
Следует особо отметить, что на сегодняшний день бортовой пассивный фотоэлектрический пеленгатор мобильного объекта, кроме всего прочего, обязан иметь минимальную массу, объем и энергопотребление, так как это актуально для «малого класса» перспективных аэрокосмических объектов - беспилотные пико-, нано- и микроаппараты, различного назначения, где перечисленные параметры играют определяющую роль. Именно указанная особенность и наблюдается у насекомых с фотопическими фасеточными глазами, где зрительная система построена на угломерном амплитудном анализе исходных сигналов, порождаемых излучением ориентира. Этого нет при геометрической проекции пучка лучей светила на фотонную линейку или матрицу при размещении их на плоскости по одной из осей прямоугольной системы координат мобильного объекта, как это обычно делают в камерных датчиках технического зрения, у которых отсутствует природный зрительный угловой аналог в отличие от статических фасеточных систем [1].
Теория пеленгации светила плоскостью с подвижной аэрокосмической платформы изложена в [2]. В ней при дистанционном измерении позиции светила определяющей функцией у статического амплитудного датчика фасеточного типа является его пеленгационная характеристика - зависимость величины выходного сигнала от угла их рассогласования на момент измерения им частей лучистого потока ориентира. Основные параметры статического датчика фасеточного типа, с точки зрения пеленгации светила плоскостью, это величины таких требуемых от него значений как: поле зрения, угловой рабочий диапазон (окно), нелинейность и точность - разрешение по углу в пределах окна пеленгационной характеристики [1].
При реализации указанных параметров статическим амплитудным датчиком фасеточного типа предпочтительно в процессе строительства (синтезировании) его пеленгационной характеристики выполнять следующие положения [3]:
1. как функция она должна быть нечетно-симметричной;
2. вблизи нулевого пеленга ее уровень должен стремиться к нулевому своему значению;
3. уровень не должен зависеть от интенсивности входного лучистого потока отдаленного источника и от параметров датчика;
4. она должна иметь максимальный угловой рабочий диапазон (окно);
5. крутизна должна стремиться к максимуму.
Параметры и характеристики статического амплитудного датчика отнюдь не являются независимыми. Они не могут быть произвольно заданы или выбраны свободно. Поэтому в ряде случаев предпочтительны определенные компромиссы для решения им конкретной задачи или иные нетрадиционные подходы. Так, например, некоторые проблемы, на практике, можно разрешить путем образования в амплитудном датчике локальных, но более сложных, объединений, которые выполняют в нем уже иные специфические задания, например, формируют положенный вид его пеленгационной характеристики. Присуще, что такие технические решения обычно не очень сильно меняют параметры амплитудного датчика по массе, объему, энергопотреблению, несмотря на некоторую локальную элементную избыточность, и в этом их заслуга и целесообразность практического использования в настоящее время. Примером отмеченных выше действий может служить заявка автора на изобретение [3], где за счет малой аппаратной избыточности предельно увеличено рабочее окно амплитудного датчика фасеточного типа. Ниже патентуется еще одно из них.
В статических амплитудных датчиках фасеточного типа главным пассивным элементом, определяющим его параметры и характеристики, является детектор излучения. На сегодняшнем уровне технологического развития и совершенствования фотонных приемников в качестве детектора излучения, на практике, как правило, в бортовых фотоэлектрических пеленгаторах используются многослойные зонные полупроводниковые элементы с p-n и другими переходами - фотодиоды (ФД).
Любое физическое тело, в том числе и ФД, отражает, поглощает, рассеивает и пропускает определенные спектральные составляющие, падающего на него излучения. Некоторая абсорбируемая ФД часть излучения в нем преобразуется в электрический ток. Но при этом исходные токи ФД не всегда удовлетворяют стоящей цели в статических амплитудных датчиках фасеточного типа. Требуются определенные действия над ними.
В бортовых датчиках фасеточного типа, не подлежит сомнению, что целесообразен фотогальванический режим работы детектора (без напряжения смещения), при котором его внутренние шумы минимальны. От этого зависит разрешение по полю зрения фотоэлектрического пеленгатора. Кроме того, предпочтителен так называемый режим «генератора тока», когда внутреннее сопротивление ФД во много раз больше сопротивления его нагрузки в электрической цепи, что важно для достижения линейной пропорции между фототоком ФД и падающим на него лучистым потоком ориентира в статических амплитудных датчиках фасеточного типа [4].
Результаты работы ФД от падающего на него излучения и фототока в электрической цепи измерителя, как правило, на практике представлены вольтамперной зависимостью выходного напряжения от фототока и апертурной (угловой) характеристикой - зависимость тока от угла падения потока излучения на поверхность детектора, чувствительную к свету.
Из вольтамперной характеристики фотонного приемника следует, что в режиме «генератора тока» (короткого замыкания) выходное напряжение ФД на нагрузке близко к нулю. Оно не является доминирующим при решении стоящей задачи перед фотоэлектрическим пеленгатором, но сильно влияет на быстродействие измерителя. Для решения задачи более важен фототок ФД в режиме «короткого замыкания», который определяется в нем не только значением величины падающего потока излучения, но и физическими свойствами детектора излучения, а также формой его чувствительной поверхности - функциональная составляющая в фототоке фотонного приемника. Кроме того, следует особо отметить, что в режиме «короткого замыкания» ФД его фототок совсем не зависит от температуры, если пренебречь незначительным эффектом, вызванным изменениями времени жизни носителей тока в зонах и сопротивлением контактов детектора [2]. Что касается его чувствительной к фотонам поверхности, то с точки зрения детектирующих возможностей оптимальной формой для ФД считается фронтальная плоскость, имеющая наибольшую эффективную площадь для фотонов и косинусную зависимость тока от угла падения излучения на нее. ФД с фронтально-торцевой, полуцилиндрической или полусферической чувствительной поверхностью в энергетическом плане по эффективной площади уступают фронтально-плоской (планарной) форме. К тому же, она самая освоенная и отработанная в технологическом плане промышленностью, распространенная и доступная в приборостроительной сфере, что позволяет широко использовать планерные ФД в качестве базовых детекторов излучения в бортовых фотоэлектрических датчиках любого типа.
Апертурная характеристика современного планарного ФД без внешнего маскирования его чувствительной поверхности от падающего излучения на практике представляет собой четно-симметричную функцию и, как правило, принято считать, подчиняется, при ее рассмотрении, закону косинуса [2].
Сегодня типовой подход формирования пеленгационных характеристик статических амплитудных датчиков фасеточного типа на ФД в большинстве случаев сводится преимущественно к вычислению зависимости «DELTA/SIGMA», по которой определяется угловое положение отдаленного лучевого источника. Данное отношение описывает, как правило, способ определения приблизительной позиции лучистого источника амплитудным датчиком с помощью его относительной пеленгационной характеристики на плоскости измерения по одной из угловых осей прямоугольной системы координат мобильного объекта через следующее выражение:
(А1-А2)/(А1+А2), где А1 и А2 - амплитуды сигналов двух ФД [5].
Формирование указанным способом пеленгационной характеристики датчика на деле предусматривает действия по сложению двух сдвинутых относительно оптического центра и одновременно наложенных друг на друга, вдоль угловой оси, апертурных характеристик планарных детекторов излучения, включенных электрически параллельно, но по токам встречно. Практическое преимущество этого способа - его простота, а недостатки - ограниченный предел угла сектора обзора датчика, обычно плюс/минус 60 градусов, и низкое при этом угловое разрешение в рамках рабочего окна фотоэлектрического пеленгатора.
«Детектор углового положения оптического источника», запатентованный в [5], как раз является показательным примером использования приведенной выше зависимости «DELTA/SIGMA» при построении амплитудного фотоэлектрического датчика фасеточного типа. Его отличительной и характерной особенностью от других фотоэлектрических пеленгаторов является использование в нем дополнительной перегородки между двумя фотонными детекторами для предотвращения перекрестного облучения их чувствительных поверхностей, исходящего от прозрачных пластин. К большому сожалению, хотя в патенте на «Детектор углового положения оптического источника» и использована перегородка в виде светонепроницаемой стенки, но ее роль только защитная от перекрестного облучения, рассеиваемого прозрачными пластинами, а не определяющая основные параметры бортового фотоэлектрического пеленгатора, что является еще одним его недостатком.
Автор настоящего изобретения заявляет, что пассивная стенка в статических амплитудных датчиках фасеточного типа после детектора излучения - главное функциональное звено в нем, является вторым по значимости строительным элементом фотоэлектрических пеленгаторов. Это проявляется тогда, когда с помощью маскирующих лучевой поток стенок формируются апертурные характеристики не «открытых» со всех сторон детекторов, а гибридных на их основе пассивных модулей, состоящих из планарного фотодиода и боковых вертикальных светонепроницаемых стенок, преобразующих излучение источника в фототок ФД уже иной зависимости при угловом определении положения источника излучения [6].
Согласно ранее заявленному автором изобретению «Способ и устройство формирования апертурной характеристики датчика угловой позиции отдаленного источника излучения» [6] в нем для этого устанавливают, по меньшей мере, две плоские стенки по бокам планарного фотодиода и ориентируют их поперек одной из угловых осей системы координат измерительного устройства. Таким образом, формируется гибридный пассивный модуль датчика светила. Здесь очень важно, что одной только высотой боковых стенок гибридного пассивного модуля можно задавать угловой сектор зрения датчика и величину нелинейности склонов его апертурной характеристики, а разностью высот стенок порождать асимметрию наклона ее слонов. Это позволяет использовать в датчике однотипные детекторы излучения с параметрами, имеющие некоторые отклонения, а их апертурные характеристики менять высотой стенок, что актуально при массовом производстве фотоэлектрических пеленгаторов.
Разумеется, что уменьшение нелинейности склонов апертурной характеристики в гибридном пассивном модуле осуществляется за счет сужения углового сектора его зрения, но в этом его преимущество, так как открывает путь к синтезированию положенных пеленгационных характеристик датчиков фасеточного типа через образование более сложных из них конфигураций.
Будем считать, что выше были изложены достаточно убедительные доводы для патентования изобретения: «Способ синтезирования положенной относительной пеленгационной характеристики статического амплитудного датчика фасеточного типа отдаленного источника лучистого потока и устройство, его реализующее» (далее - Способ…).
В качестве прототипа в нем взято за основу наиболее близкий по назначению и общим существенным признакам для способа и устройства реальный продукт - «Детектор углового положения оптического источника», запатентованный в [5]. Его главные недостатки ранее были уже описаны. Изобретение на Способ… направлено на устранение недостатков выбранного прототипа и дальнейшее совершенствование статических амплитудных датчиков фасеточного типа путем внедрения и использования в них гибридных пассивных модулей и локальной аппаратной избыточности, необходимой для автономного функционирования датчика.
Суть патентуемого Способа… заключается в замене планарных ФД в датчике на гибридные модули, которые состоят из пассивного детектора излучения с фронтально-плоской чувствительной поверхностью и, по меньшей мере, пары тонких светонепроницаемых вертикальных стенок, расположенных по их бокам вдоль угловой оси прямоугольной системы координат датчика, а также синтезировании из этих модулей пеленгационных характеристик датчика.
Синтезирование - образование более сложных соединений из исходных гибридных модулей - предусматривает в данном заявленном патенте следующие действия.
Для синтезирования пеленгационной характеристики датчика берут, как правило, четное число гибридных пассивных моделей, по меньшей мере два, объединяют их диоды электрически параллельно, но по фототоку встречно. Выстраивают последовательно апертурные характеристики модулей на плоскости вдоль из одной угловых осей прямоугольной системы координат датчика, располагая их на его гранях таким образом, чтобы токовая функциональная зависимость выходного сигнала соответствовала фактическому угловому рассогласованию оптической оси датчика с энергетическим центром светила, а также имела в себе признак направления на ориентир. При этом понятно, что необходимая зависимость в выходном сигнале датчика будет наступать только тогда, когда гибридные пассивные модули ориентированы между собой под заранее заданным углом относительно оптического центра вдоль одной из осей прямоугольной системы координат бортового пеленгатора, а в качестве признака направления выступает сама полярность его текущего сигнала.
Практически указанные действия сводится к простой угловой стыковке и фиксации на нулевом уровне сформированных под конкретные углы амплитудных характеристик гибридных модулей, имеющих разную полярность. Несомненно, что все действия и операции в датчике полностью правомерны, так как любая пара сформированных и состыкованных гибридных пассивных модулей является всегда одной из локальных пеленгационных характеристик в секторе зрения датчика фасеточного типа без каких-либо наложений их между собой в пределах обзорного его диапазона.
Именно в этом заключаются отличительные признаки патентуемого Способа… от признаков выбранного прототипа, где работа ФД требует обязательно реализации условий, необходимых для наложения их апертурных характеристик и наличия из-за этого маскирующих перегородок между ними.
Таким образом, Способ… имеет совсем иные технические приемы и действия, когда за счет не очень большего числа гибридных пассивных модулей, используемых в датчике фасеточного типа, можно с их помощью выполнять различные перечисленные выше положения, необходимые для решения конкретной задачи, и получить при этом минимальные параметры по массе, объему и энергопотреблению.
Относительные измерения - измерение отношения величины к одноименной величине, играющей роль единицы, или измерения величины по отношению к одноименной величине, принимаемой за исходную [7]. Их значимость для измерительных средств дистанционного зондирования позиции отдаленного источника лучистого потока заключается в том, что они позволяют устранить недостатки абсолютных измерений - необходимость исходного энергетического постоянства источника излучения при определении его положения датчиком. Кроме того, относительные измерения также существенно уменьшают влияние вариаций параметров внешней среды и датчика на конечные результаты работы статического пеленгатора [3].
Практическая реализация относительных измерений в фотоэлектрических пеленгаторах, изготовленных на основе структур фасеточного типа, выполняется по замыслу автора изобретения аналого-цифровым преобразователем. В этом варианте на главный вход аналого-цифрового преобразователя поступают сигналы от детекторов излучения, а на вход для опоры подается сигнал текущего значения масштабного фактора, формирование которого осуществляется с помощью основных или дополнительных фотонных приемников пеленгатора, которые охватывают собой секторы обзора соседних детектирующих элементов. [3, 4].
Сам по себе патентуемый Способ… полностью соответствует условиям изобретательского уровня, так как применим для построения различных видов статических пеленгаторов фасеточного типа, определяющих позицию не только Солнца, но и других отдаленных источников излучения, имеющих отличные от него энергетические параметры. Кроме того, он позволяет создавать устройства, которые одновременно измеряют направления на энергетические центры нескольких светящихся ориентиров, если последние попадают по отдельности в поля зрения локальных угловых секторов, находящихся в пределах обзорного диапазона пеленгатора. Его спектральные возможности и диапазон длин детектируемых лучевых волн определяются исключительно только выбором фотонных приемников излучения, так как в нем нет оптических селективных элементов на пути излучений, падающих на них. Очень важно, что окно обзорного диапазона таких устройств может быть задано в пределах от 10 и до 360 градусов. Только высота вертикальных стенок гибридных пассивных модулей и общее количество детекторов излучения в статическом пеленгаторе являются лимитирующими факторами при построении подобных устройств, реализующих патентуемый Способ… с различными для них требованиями. Он открывает новый путь к созданию высокоточных датчиков позиции энергетических центров лучистых источников с большим обзорным окном, вплоть до 360 градусов, которые работают в реальном масштабе времени, ограниченным используемой элементной базой и ее электропотреблением, что актуально сейчас.
Наконец, Способ… позволяет строить автономные статические пеленгаторы, когда в нем имеются гибридные многозонные каскадные детектирующие элементы. Верхние независимые зоны таких фотонных элементов генерируют фототоки от падающего на них излучения источника, которые необходимы для формирования сигналов масштабного фактора в датчике, чтобы реализовать им относительные измерения. В то время как нижние зоны ФД обеспечивают электроэнергией местный источник питания пеленгатора, необходимой для его независимости от мобильного объекта, за исключением размещения последнего на нем.
Сравнение изложенных подходов, приемов и действий не только с прототипом, но и с другими техническими возможностями и средствами по части реализации ими устройств дистанционного зондирования позиций источников лучистого потока - статические амплитудные датчики фасеточного типа, не позволило выявить в них признаки, аналогичные патентуемым решениям. Следовательно, их можно считать существенными и новыми, позволяющими далее ими совершенствовать статические пассивные средства дистанционного зондирования позиции различных по интенсивности источников излучения.
Для демонстрации реализации нового способа в данном случае патентуется только одно из устройств. Дело в том, что построение устройства, реализующего Способ…, является вариационной задачей, так как конкретные требуемые параметры статического пеленгатора фасеточного типа сильно взаимосвязаны между собой. Например, чтобы создать «точный датчик Солнца» с окном зрения в 10 градусов, необходим, в конструктивном плане, несколько иной подход, чем построить «пеленгатор светила» с окном обзорного диапазона в 120-160 градусов. Поэтому, если очень надо иметь измерительный прибор с минимальными строительными параметрами по массе, объему и потреблению, а также исходя из его архитектурного дизайна, то очевидно, что по своему содержанию и форме конкретные устройства, исполняющие различные требования, выдвигаемые к статическому пеленгатору и реализующие Способ…, могут существенно отличаться друг от друга. Однако по сути Способа…, по функциональному и внутреннему строению частей устройства все они одинаковы.
Общие отличительные признаки всех возможных устройств, реализующих Способ…, например, по отношению к выбранному прототипу следующие:
- отсутствие оптических элементов и отдельного вычислителя, например, бортового компьютера;
- наличие гибридных пассивных модулей, заменяющих планарные ФД, которые собой не затеняют друг друга;
- многофункциональное назначение аналого-цифрового преобразователя в них с целью:
- смены формы представления аналоговых сигналов в цифровой вид;
- получения текущего значения позиции источника отдаленного излучения в виде кода через отношение амплитуд сигналов, поданных на его входы.
Для новизны изобретения перечисленного вполне достаточно.
Технический результат предпочтительного варианта патентуемого устройства, реализующего Способ…, достигается путем создания одноосного датчика фасеточного типа, содержащий аналого-цифровой преобразователь, по меньшей мере, два измерительных гибридных пассивных детектирующих модуля, соединенных с аналого-цифровым преобразователем посредством преобразователей «ток-напряжение», инвертора и двух сумматоров, которые облучаются потоком отдаленного источника и расположены в разных плоскостях под углом друг к другу, при этом в датчике с помощью третьего гибридного пассивного детектирующего модуля в сочетании с преобразователем «ток-напряжение» и сумматора, куда подаются также сигналы от двух исходных боковых гибридных модулей, при одновременном облучении источником всех его модулей, формируется сигнал масштабного фактора, необходимый для функционирования аналого-цифрового преобразователя, выступающего как измерителя отношений или делителя напряжения с цифровым выходом, что позволяет ему иметь однозначную зависимость величины выходного сигнала от угла рассогласования оптической оси датчика с энергетическим центром отдаленного источника излучения на момент измерения устройством частей лучистого потока ориентира.
В предпочтительном варианте реализации патентуемого устройства его конструкция включает в себя основание, три одинаковых гибридных детектирующих модуля, образующие с основанием усеченную призму с сечением в форме равнобедренного четырехугольника со скошенными равными углами, прилегающими к основанию. При этом линейные электронные элементы устройства размещаются с двух сторон на плоской монтажной плате, находящейся во внутренней полости датчика, представляющей собой усеченный по бокам вариант параллелепипеда.
В альтернативной конструкции патентуемого устройства - двухосный вариант датчика фасеточного типа - оно включает в себя основание, пять одинаковых гибридных пассивных детектирующих модулей, образующие с основанием четырехгранную усеченную пирамиду с равными углами, прилегающими к основанию. При этом удвоенный комплект линейных электронных элементов устройства, аналогично предпочтительному варианту датчика, располагается также внутри его конструктивного массива.
Для лучшего понимания патентуемого изобретения далее приводятся его схемы, характеристики, общий вид устройства и их описание.
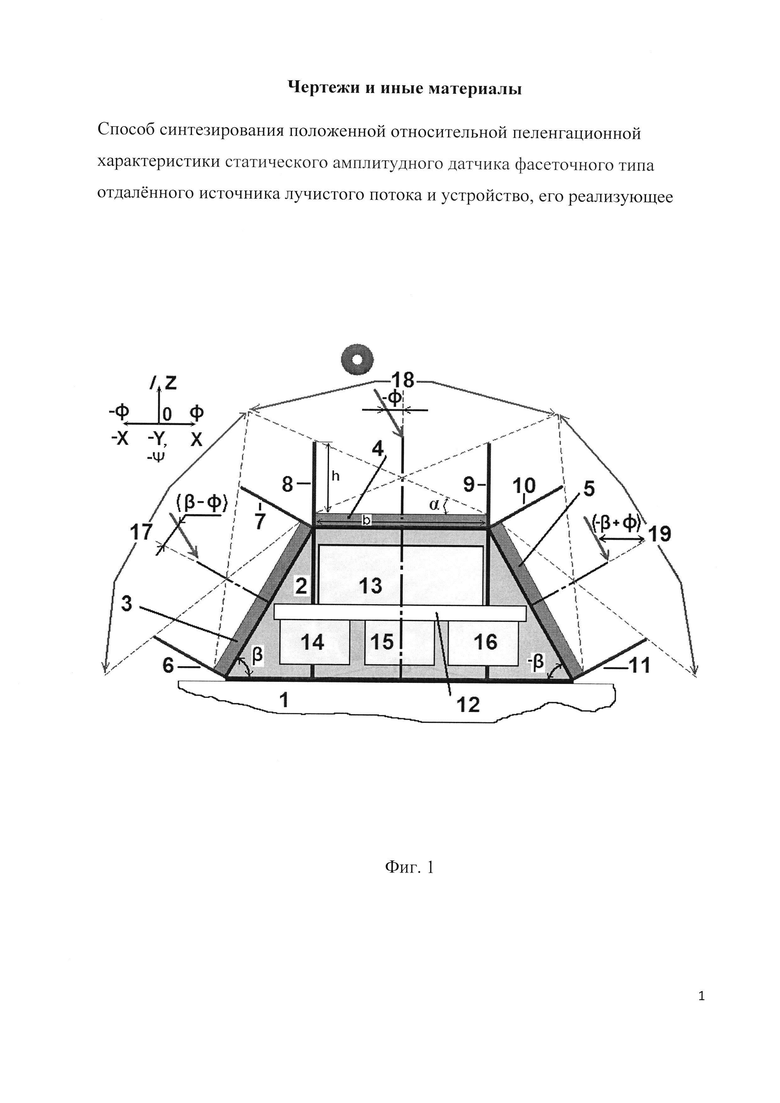
Фиг. 1 - Схема одноосного устройства, реализующего Способ…, где:
X0YZ - трехосная прямоугольная система координат устройства с осями в метрах; Ф0Ψ - двухосная прямоугольная система координат с осями в градусах; OA - ось амплитуд фототока детектора излучения в миллиамперах;
1 - фундаментальная посадочная плоскость мобильного объекта; 2 - вид сечения устройства по координатным осям: минус 0Х, 0Х и 0Z; 3, 4, 5 - планарные детекторы излучения; 6, 7, 8, 9, 10, 11 - вертикальные светонепроницаемые стенки по бокам детекторов излучения; 12 - монтажная плата для электронных компонент устройства; 13, 14, 15, 16 - электронные элементы, размещенные на монтажной плате устройства; 17, 18, 19 - сектора измерения гибридных пассивных детектирующих модулей устройства; φ - угловое положение источника излучения; β - угол между боковой гранью конструктива устройства, где с внешней стороны размещается и фиксируется детектор излучения, и его основанием в трехосной прямоугольной системе его координат; h - высота вертикальной стенки; b - ширина или длина чувствительной поверхности планарного детектора излучения; α - угол маскирования излучения тенью, падающей на детектор излучения от боковых светонепроницаемых вертикальных стенок.
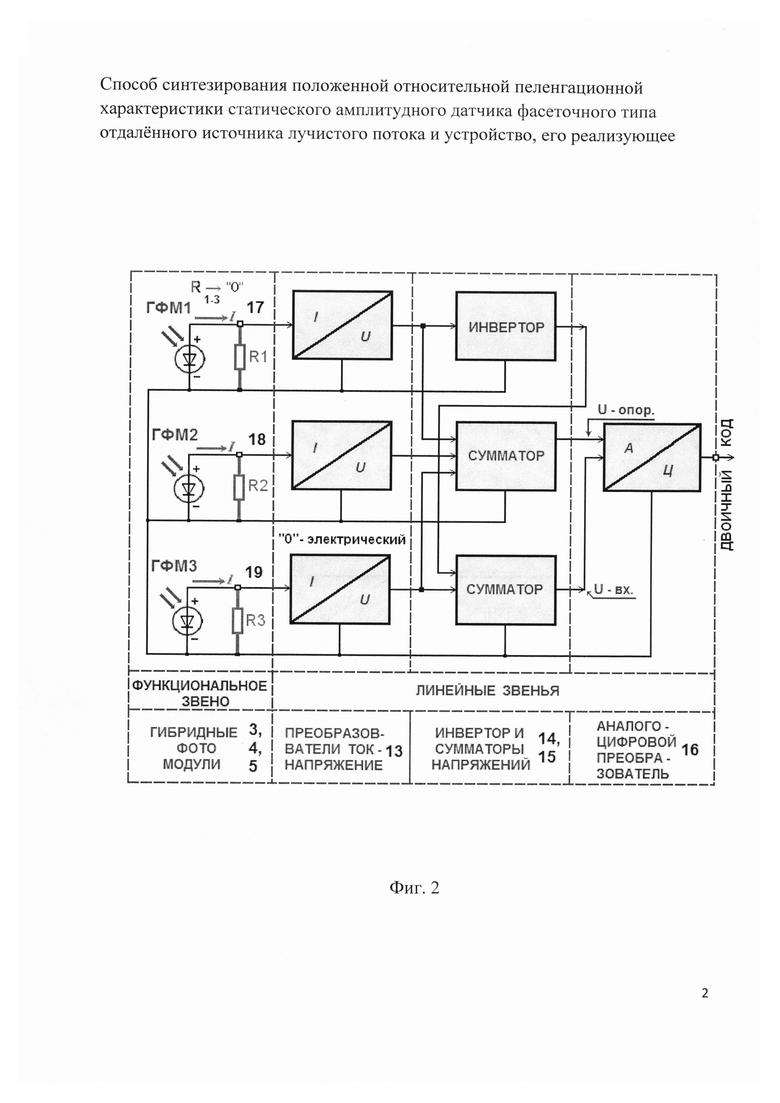
Фиг. 2 - Схема электрическая принципиальная одноосного устройства, реализующего Способ…, где:
3, 4, 5 - гибридные пассивные детектирующие модули ГФМ1, ГФМ2, ГФМ3; 13 - преобразователи ток-напряжение; 14, 15 - инвертор напряжения и сумматоры в устройстве; 16 - аналого-цифровой преобразователь с внешней опорой.
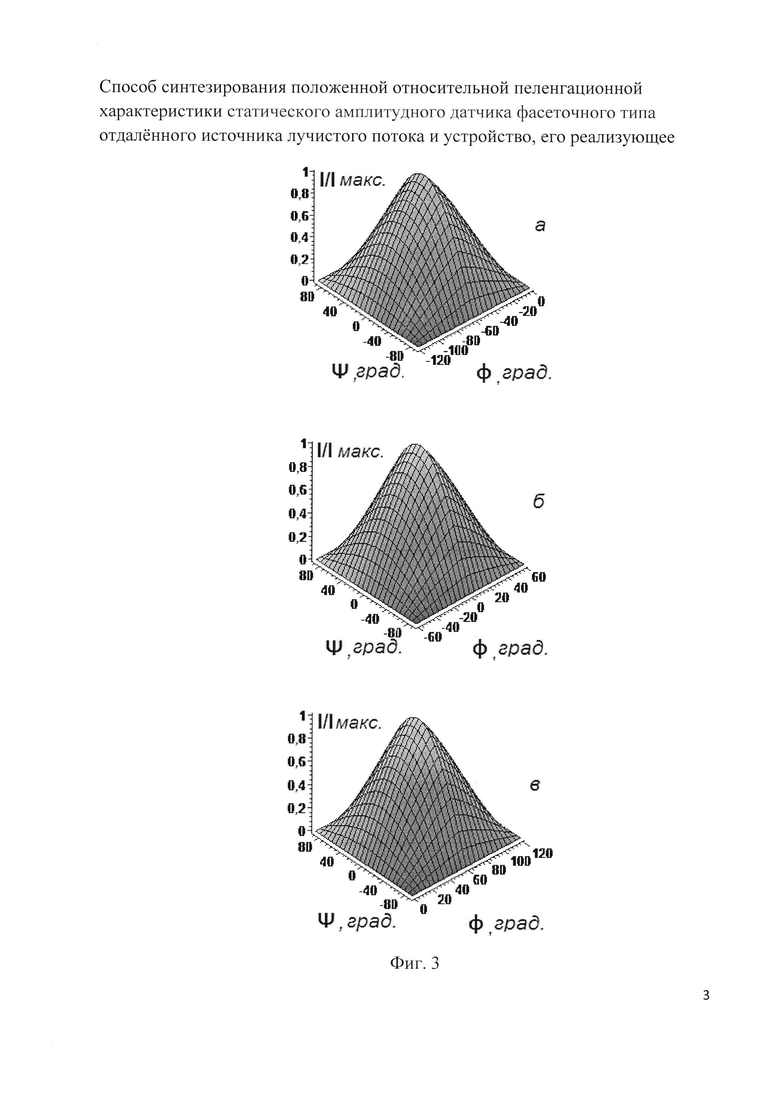
Фиг. 3 - «Трехмерные» апертурные характеристики гибридных пассивных детектирующих модулей, входящих в состав одноосного устройства, реализующего Способ…, где:
Фиг. 3а - апертурная характеристика в пределах сектора измерения 17 бокового гибридного пассивного модуля, состоящего из детектора 3 и двух боковых стенок 6, 7, изображенная в прямоугольной системе координат по осям: минус 0Ф, плюс, минус 0Ψ, 0A; Фиг. 3б - апертурная характеристика в пределах сектора измерения 18 центрального гибридного модуля, состоящего из детектора 4 и двух боковых стенок 8, 9, изображенная в прямоугольной системе координат по осям: плюс, минус 0Ф и 0Ψ 0A; Фиг. 3в - апертурная характеристика в пределах сектора 19 противоположного бокового гибридного модуля, состоящего из детектора 5 и двух боковых стенок 10, 11, изображенная в прямоугольной системе координат по осям: 0Ф, плюс, минус 0Ψ, 0A.
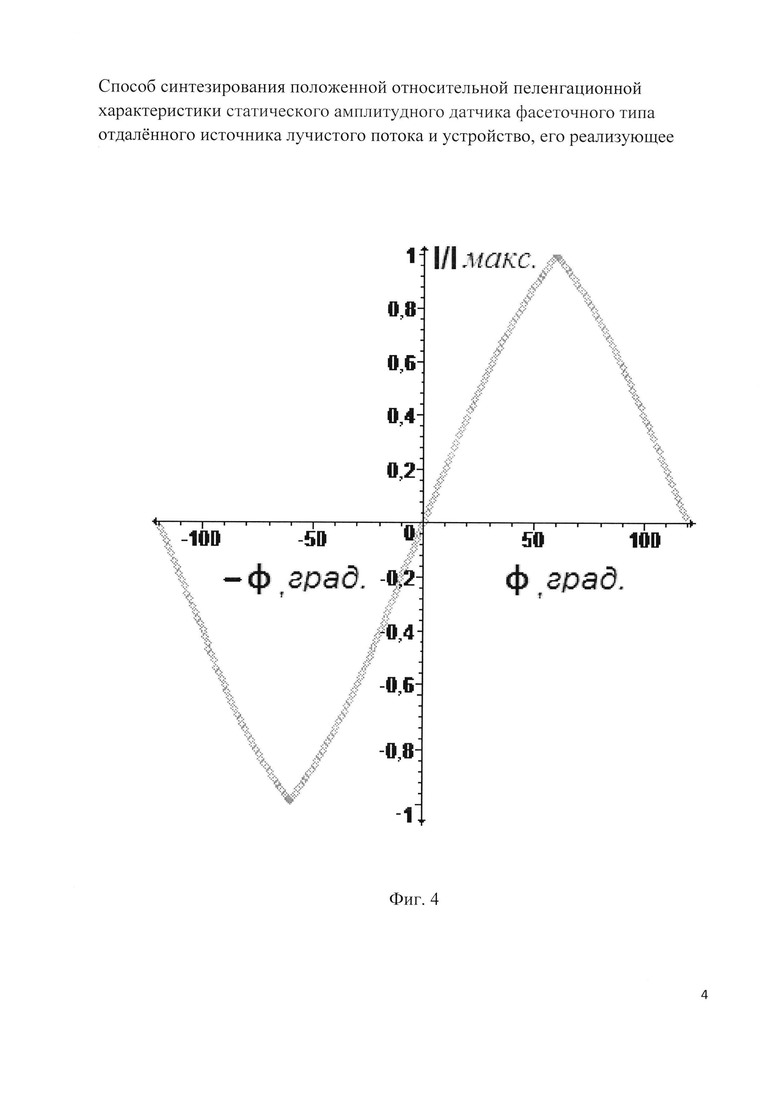
Фиг. 4 - Пеленгационная характеристика устройства, реализующего Способ…, на входе аналого-цифрового преобразователя, изображенная в двухосной прямоугольной системе координат устройства по осям 0Ф, 0A - ее первая четверть, и минусы 0Ф, 0A - ее третья четверть.
Фиг. 5 - Фрагменты апертурных характеристик устройства визуализированных, в пределах первой четверти двухосной прямоугольной системы координат устройства, где:
1 - фрагмент апертурной характеристики ГФМ1 - точка 17 на Фиг. 2;
2 - фрагмент апертурной характеристики ГФМ2 - точка 18 на Фиг. 2;
3 - фрагмент апертурной характеристики сигнала масштабного фактора - точка «вх. опор.» у аналого-цифрового преобразователя на Фиг. 2.
4 - предельное значение величины сигнала масштабного фактора на входе аналого-цифрового преобразователя.
Фиг. 6 - Фрагменты пеленгационных характеристик на выходе датчиков фасеточного типа, визуализированные в пределах первой четверти двухосной прямоугольной системы координат устройств, где:
1 - фрагмент пеленгационной характеристики патентуемого устройства, реализующего Способ…, изображенной в первой четверти двухосной прямоугольной системы координат датчика;
2 - фрагмент пеленгационной характеристики «идеального» датчика, изображенной в первой четверти его двухосной прямоугольной системы координат;
3 - фрагмент пеленгационной характеристики устройства, взятого в качестве прототипа, которая изображена в первой четверти двухосной прямоугольной системы координат.
Фиг. 7 - Фрагменты характеристик относительных погрешностей датчиков фасеточного типа в пределах первой четверти двухосной прямоугольной системы координат устройств, где:
1 - фрагмент относительной погрешности патентуемого устройства, реализующего Способ…;
2 - фрагмент относительной погрешности устройства, взятого в качестве прототипа;
3, 4, 5 - значения величин пределов, в которых находятся визуализируемые погрешности устройств.
Фиг. 8 - Внешние виды спереди и сверху двухосного варианта устройства, реализующего Способ…, где:
1 - фундаментальная посадочная плоскость мобильного объекта;
2 - вид корпуса двухосного устройства, реализующего Способ…;
20, 21, 22, 23, 24 - гибридные пассивные детектирующие модули;
25 - вид, в качестве примера, одной из двадцати стенок гибридного пассивного детектирующего модуля.
Перейдем к описанию патентуемого устройства, условно приняв за исход: парадигму физики, источник излучения - Солнце, две прямоугольные системы координат с взаимно компланарно-ориентированными осями.
Патентуемое устройство статического пеленгатора фасеточного типа по своей сути довольно просто (Фиг. 1). Оно включает в одноосном исполнении три гибридных пассивных модуля, которые имеют фронтально-плоскую чувствительную поверхность своих детекторов излучения 3, 4, 5. Из них два боковых гибридных пассивных модуля 3, 5, ориентированных под углом друг к другу вдоль одной из осей прямоугольной системы координат пеленгатора, необходимы для определения позиции излучающего источника. Третий гибридный пассивный модуль 4, располагаемый над ними и ориентированный своей чувствительной поверхностью перпендикулярно оптической оси пеленгатора, в сторону его обзорного поля, где излучает источник - Солнце, необходим в устройстве для формирования сигнала масштабного фактора, подаваемого на опорный вход аналого-цифрового преобразователя (Фиг. 2). Указанные модули 3, 4, 5 являются по существу построения единственными функциональными звеньями датчика, которые отвечают за формирование его пеленгационной характеристики, так как все остальные электронные элементы 13, 14, 15, 16 - линейные четырехполюсники. Это демонстрирует Фиг. 2. Особых пояснений о работе устройства, при наличии Фиг. 1 и Фиг. 2, не требуется.
Взяв за основу изложенный материал в [6], а в качестве облучателя датчика Солнце, можно фототоки гибридных пассивных модулей в точках 17, 18 и 19 (Фиг. 1 и Фиг. 2), при условии равенства параметров всех трех гибридных пассивных модулей, описать как:

- для центрального ГФМ2,

-для бокового ГФМ1,

- для бокового ГФМ3, где:
Es - облученность (Вт/м2);
А - фотоэлектрический параметр детектора излучения, равный - k*s*b2, у которого:
k - квантовая эффективность детектора излучения;
s - крутизна при нормальном падении на детектор лучистого потока, которая соответствует его токовой чувствительности (А/Вт);
b - длина одной из чувствительных сторон детектора излучения (м);
cos(φ), cos(ψ) и sin(φ) - Угловые зависимости фототока детектора излучения от падающего на него потока излучения источника;
β - угол между основаниями датчика и детектора излучения;
φ, ψ - угловые положения проекций потока источника излучения между оптической осью датчика (нормалью к фундаментальной посадочной плоскости мобильного объекта) и направлением проекций потока излучения по осям прямоугольной системы координат устройства;
* - знак умножения.
Функции фототоков: I1(φ,ψ) - 17, I2(φ,ψ) - 18, I3(φ,ψ) - 19 на выходе гибридных пассивных модулей ГФМ1, ГФМ2, ГФМ3 (Фиг. 1 и Фиг. 2) визуализированы на Фиг. 3 как: а-17, б-18, в-19.
Угловое положение источника лучистого потока по оси φ в цифровом виде определяется аналого-цифровым преобразователем 16, на «позиционный» вход которого поступает биполярный сигнал, линейно сформированный инвертором и сумматором, при подаче на них сигналов I1(φ,ψ) и I3(φ,ψ), преобразованных в напряжения преобразователями «ток-напряжение» 13, показанных на Фиг. 3.
Для определения устройством углового положения источника лучистого потока по оси φ в нем используют иную пеленгационную характеристику, которая отлична от хорошо известной функции отношения DELTA/SIGMA, реализованной в выбранном прототипе [5]. Подобно прототипу ее выражение для патентуемого изобретения может быть записано как:




h/b=tgα - коэффициент маскирования излучения тенью, падающей на детектор излучения от боковых светонепроницаемых вертикальных стенок, равных по высоте.
Визуальная картина биполярного сигнала (I1-I3), но не разностного его значения, показана на Фиг. 4. Отличие суммы однополярных сигналов (I1+I2+I3) в знаменателе отношения (4) - масштабный фактор датчика - от I1 и 13 обрисованы на Фиг. 5, где они представлены фрагментарно в первой четверти квадранта по оси φ, чтобы нагляднее видеть различия их форм и вариации амплитуд.
Если исходить из того, что все относительно, то результаты построений трех вариантов (1 - синтезированной, 2 - идеальной; 3 - взятой за прототип) пеленгационных характеристик различных датчиков, представленных на Фиг. 6, для окна сектора измерений 120 градусов однозначно в наглядной форме подтверждают преимущество патентуемого способа и устройства, его реализующего, перед вариантом, использованным в прототипе.
Действия, направленные на получение положительного результаты в патентуемом изобретении, предусматривают увеличение крутизны и линейности склонов апертурных характеристик гибридных пассивных модулей датчика, а также исключение за счет амплитудных потерь формы, характерной для прототипа, его относительной пеленгационной характеристики.
Кроме того, нововведением в нем является использование иного, более эффективного, масштабного фактора. Это позволило, как отображено на Фиг. 7, понизить погрешность измерений 1 в секторе 120 градусов почти на порядок по отношению к выбранному прототипу 2, а также приблизить среднюю пеленгационную чувствительность в рабочем окне датчика к значению, близкому к идеальному варианту, представленному на Фиг. 6.
Что касается построения двухосного устройства, реализующего Способ…, то здесь нет особых сложностей. Берем пять гибридных пассивных модулей, имеющих вертикальные светонепроницаемые стенки одинаковой высоты, располагаем и фиксируем их на ребрах, усеченной сверху, четырехгранной пирамиды 2, внутри которой размещаем парную электронику датчика. Общий облик моноблочного двухосного устройства и его ориентировочные размеры, при чувствительной площади ФД в один квадратный сантиметр, приведены на Фиг. 8.
Определение координаты источника лучистого потока по углу места осуществляется в нем так же, как и при измерении азимутальной координаты, описанной выше (Фиг. 1). Отличие состоит в том, что при определении угла места и азимута используется один общий центральный модуль 20. Следовательно, в двухосном устройстве формируются два ортогональных набора модулей: 20, 21, 23 - азимутальный набор и 20, 22, 24 - набор для угла места. Кроме того, планарные детекторы модулей закрыты вертикальными стенками 25 со всех их четырех боковых сторон. Такое конструктивное решение позволяет легко реализовать моноблочный вариант двухосного устройства с минимальными для него массой и объемом, что и демонстрирует Фиг. 8.
Источники информации
1. Глазков В.Д. «Фасеточные солнечные датчики и их возможности» // Всерос. научно-технич. конф. «Современные проблемы определения ориентации и навигации космических аппаратов». Россия, Таруса, 13-16 сент. 2010: Сб. тр. М.: ИКИ РАН, 2011. С. 160-173 (Сер. «Механика, управление и информатика».
2. Воробьев Л.М. «Астрономическая навигация летательных аппаратов». М.: Издательство «Машиностроение», 1968.
3. Заявка на изобретение RU 2014139839 А от 02.10.2014.
4. Ишанин Г.Г., Челибанов Г.Г. «Физические основы работы фотодиодов в фотогальваническом и фотодиодном режимах». Известия Вузов. Приборостроение. 2012. Т. 55, №4.
5. «Детектор углового положения оптического источника», Патент RU 2399063, 16/12/2008.
6. Заявка на изобретение RU 2015118194 от 15.05.2015.
7. Большая советская энциклопедия (БСЭ, 1926-1990).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство коррекции нелинейности характеристики фотоэлектрического пеленгатора отдалённого источника электромагнитной энергии в пределах обзорного развёрнутого угла | 2016 |
|
RU2631834C2 |
| ДЕТЕКТОР ПОЗИЦИИ ОТДАЛЕННОГО ИСТОЧНИКА ЛУЧИСТОГО ПОТОКА И СПОСОБ ЕЕ ОПРЕДЕЛЕНИЯ ИМ | 2014 |
|
RU2603825C2 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ АПЕРТУРНОЙ ХАРАКТЕРИСТИКИ ДАТЧИКА УГЛОВОЙ ПОЗИЦИИ ОТДАЛЁННОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ | 2015 |
|
RU2602399C1 |
| УСТРОЙСТВО ГЛАЗКОВА ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ИСТОЧНИКА СВЕТА И СПОСОБ ГЛАЗКОВА ЕГО РАБОТЫ | 2013 |
|
RU2526218C1 |
| РАДИОПЕЛЕНГАТОР | 2012 |
|
RU2505831C2 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР СКАНИРУЮЩИХ ИСТОЧНИКОВ | 1993 |
|
RU2073878C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК РАДИОИЗЛУЧЕНИЯ И ПЕЛЕНГАТОР | 2010 |
|
RU2434240C1 |
| СИСТЕМА И СПОСОБ СЛЕЖЕНИЯ АНТЕННОЙ СИСТЕМЫ ЗЕМНОЙ СТАНЦИИ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2821956C1 |
| СПОСОБ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОСИГНАЛОВ | 2015 |
|
RU2596018C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2175770C1 |
Изобретение относится к области приборостроения и касается дальнейшего совершенствования амплитудных датчиков фасеточного типа, участвующих в решении задач навигации, ориентации, стабилизации и положения мобильных объектов по Солнцу или источнику иной интенсивности. Способ разрешает проблему синтеза положенной относительной пеленгационной характеристики датчика, которая определяет позицию энергетического центра отдаленного лучистого источника относительно главной оси прямоугольной системы координат мобильного объекта. Сущность способа заключается в замене пассивных детекторов излучения - фотонных приемников датчика на гибридные пассивные модули, включающие пассивный детектор излучения с фронтально-плоской чувствительной поверхностью и пару тонких светонепроницаемых вертикальных стенок, расположенных по бокам вдоль угловой оси прямоугольной системы координат датчика, синтезировании с помощью гибридных пассивных модулей положенной относительной пеленгационной характеристики. Синтезирование - объединение конкретного набора гибридных модулей, что разрешает оптимизировать измерительные параметры датчика под решаемую задачу. Устройство - датчик (пассивный пеленгатор), реализующее способ, демонстрирует при соответствующем конструктивном и технологическом подходе построения путь получения минимальных значений величин массы, объема и электропотребления. Способ и устройство, реализующее способ, открывают новое направление построения пассивных фотоэлектрических пеленгаторов с обзорными окнами 10-360 градусов, по каждой координате, при минимальной погрешности угловых измерений в них. 2 н. и 9 з.п. ф-лы, 8 ил.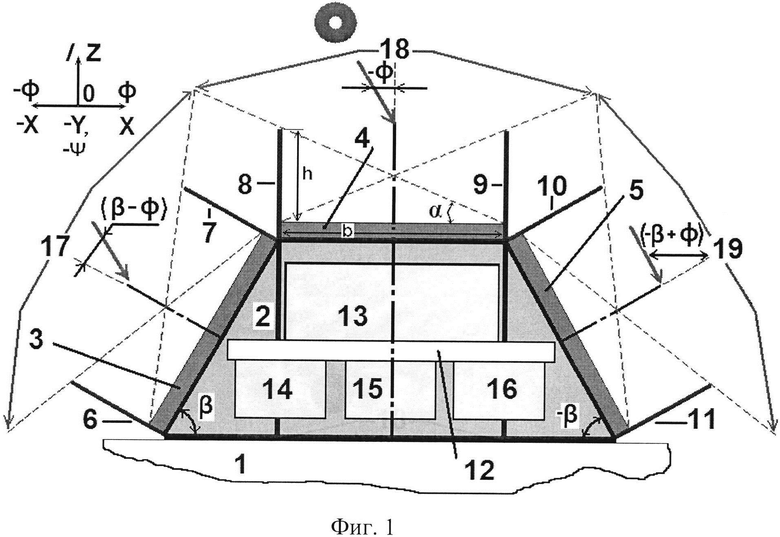
1. Способ синтезирования положенной относительной пеленгационной характеристики статического амплитудного датчика фасеточного типа отдаленного источника лучистого потока, заключающийся в том, что используют набор разноориентированных относительно оптической оси датчика гибридных пассивных детектирующих модулей, где применяют полупроводниковый детектор излучения, при падении составляющих частей лучистого потока отдаленного источника на чувствительную поверхность детекторов модулей получают фототоки, с помощью фототоков, которые преобразуют в напряжения, синтезируют два измерительных объединения в виде отношения разности и суммы амплитуд напряжений детекторов излучения модулей, принимают полученное отношение за положенную относительную пеленгационную характеристику датчика фасеточного типа, отличающийся тем, что при формировании отношения из синтезируемых измерительных объединений используют набор, по меньшей мере, из трех измерительных гибридных пассивных детектирующих модулей, реализуют угловую стыковку, формируют и фиксируют на нулевом уровне амплитудные характеристики модулей с сигналами противоположной полярности, при этом из пары сформированных амплитудных характеристик соседних модулей получают одну локальную пеленгационную характеристику в секторе зрения датчика фасеточного типа без наложения характеристик между собой в пределах обзорного диапазона, на основании сформированных локальных пеленгационных характеристик, через отношения, синтезируют положенную относительную характеристику амплитудного датчика фасеточного типа.
2. Способ по п. 1, отличающийся тем, что в фасеточную структуру датчика включают, по меньшей мере, три полупроводниковых детектора излучения фотовольтаического типа с фронтально-плоской чувствительной поверхностью и одинаковыми параметрами, помещают детекторы излучения между светонепроницаемыми стенками, представляющие собой плоские пластины, образуют в датчике в сочетании с детектором излучения фотовольтаического типа и светонепроницаемыми стенками пассивный гибридный детектирующий модуль, получают линейную выходную зависимость фототока модуля, определяемую значением величины составляющей части падающего на датчик лучистого потока отдаленного источника.
3. Способ по п. 1, отличающийся тем, что видоизменяют исходные «косинусные» функциональные зависимости фототоков детекторов излучения - апертурные характеристики, в детектирующих модулях при воздействии на них составляющих частей падающего лучистого потока источника, с помощью светонепроницаемых стенок, располагают стенки вертикально, перпендикулярно по бокам чувствительных поверхностей детекторов излучения и параллельно вдоль оси прямоугольной угловой системы координат мобильного объекта.
4. Способ по п. 1, отличающийся тем, что формируют с помощью возникающих теней, порождаемых светонепроницаемыми стенками, возводимых на пути падающего на модули лучистого потока источника и чувствительной поверхностью детекторов излучения в них, наклоны склонов апертурных характеристик модуля.
5. Способ по п. 1, отличающийся тем, что задают требуемую угловую асимметрию или восстанавливают симметрию наклона склонов апертурных характеристик модуля значениями высот светонепроницаемых стенок гибридного модуля.
6. Способ по п. 1, отличающийся тем, что формируют значениями высот светонепроницаемых боковых стенок гибридных модулей: угловой сектор обзора, крутизну и окно положенной относительной пеленгационной характеристики датчика фасеточного типа.
7. Способ по п. 1, отличающийся тем, что синтезируют при наличии, по меньшей мере, третьего дополнительного гибридного модуля в фасеточной структуре датчика сигнал «масштабный фактор» в пределах обзорного сектора, строят через отношение разности амплитуд напряжений двух детекторов излучения к сумме, по меньшей мере, трех амплитуд напряжений детекторов излучений гибридных модулей положенную относительную пеленгационную характеристику датчика, считывают по этому отношению результаты углового измерения отклонения зависимости величины выходного сигнала от угла рассогласования на момент измерения детекторами излучения модулей составляющих частей лучистого потока ориентира в пределах облучаемого сектора - рабочего окна пеленгатора, регистрируют в виде кода на выходе датчика положение источника лучистого потока в моменты возникновения амплитуд фототоков в трех пассивных детектирующих модулях.
8. Способ по п. 1, отличающийся тем, что получают результат измерения в датчике на аппаратном уровне в цифровой форме, используют для получения результатов измерения один преобразователь «аналог-цифра» при подаче на вход - «внешняя опора» - синтезируемого сигнала «масштабный фактор».
9. Устройство для реализации способа, содержащее статический амплитудный датчик фасеточного типа, отличающееся тем, что датчик включает три измерительных гибридных пассивных детектирующих модуля, расположенных под углом друг к другу, которые соединены с преобразователем «аналог-цифра» посредством преобразователей «ток-напряжение», инвертора и двух сумматоров напряжений, тогда в этом варианте построения устройства амплитудами фототоков детекторов излучения боковых измерительных гибридных модулей при облучении датчика ориентиром определяется позиция источника излучения в пределах обзорного диапазона, когда на первый сумматор напряжения поступают разнополярные сигналы, а амплитудами фототоков детекторов излучения трех измерительных гибридных пассивных модулей на выходе второго сумматора формируется объединенный суммарный сигнал, представляющий собой внешнее опорное напряжение - «масштабный фактор», обеспечивающее работу преобразователя «аналог-цифра», выполняющего в датчике с цифровым выходом еще функцию измерителя отношений или делителя напряжений для получения однозначной зависимости величин выходного сигнала от углов рассогласования положений оптической оси датчика с энергетическим центром отдаленного источника излучения на моменты детектирования датчиком составных частей лучистого потока ориентира.
10. Устройство по п. 9, отличающееся тем, что патентуемая конструкция датчика включает в себя основание, три одинаковых гибридных детектирующих модуля, образующих с основанием усеченную призму с сечением в форме равнобедренного четырехугольника со скошенными равными углами, прилегающими к основанию, которое жестко крепится к фундаментальной посадочной плоскости мобильного объекта.
11. Устройство по п. 9, отличающееся тем, что линейные электронные элементы датчика - преобразователи «ток-напряжение», инвертор и сумматоры напряжений и преобразователь «аналог-цифра» размещаются с двух сторон на плоской монтажной плате, находящейся во внутренней полости датчика, представляющей собой усеченный по бокам вариант параллелепипеда.
| ДЕТЕКТОР УГЛОВОГО ПОЛОЖЕНИЯ ОПТИЧЕСКОГО ИСТОЧНИКА | 2008 |
|
RU2399063C1 |
| УСТРОЙСТВО ГЛАЗКОВА ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ИСТОЧНИКА СВЕТА И СПОСОБ ГЛАЗКОВА ЕГО РАБОТЫ | 2013 |
|
RU2526218C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ИМПУЛЬСНОГО ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 1994 |
|
RU2088949C1 |
| СПОСОБ И УСТРОЙСТВО ПЕЛЕНГАЦИИ ТОЧЕЧНОГО ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2008 |
|
RU2393496C2 |
| WO 2001020361 A1, 22.03/2001 | |||
| УСТРОЙСТВО для СВЕРТЫВАНИЯ ЛИСТОВОГО МАТЕРИАЛАВ РУЛОНЫ | 0 |
|
SU180512A1 |
| KR 2013074548 A, 04.07.2013. | |||

