Область техники, к которой относится изобретение
Изобретение относится к системе и способу управления двигателем при одновременном воздействии водителя на педаль тормоза и педаль акселератора.
Уровень техники
Усовершенствованные системы управления двигателем обеспечивают повышенную функциональность на фоне роста требований к токсичным выбросам и показателям двигателя. Например, электроуправляемые дроссели улучшают управляемость автомобилем и снижают объем токсичных выбросов за счет регулирования положения дроссельной заслонки двигателя с целью регулирования расхода воздуха, поступающего в двигатель, чтобы подачу топлива можно было точнее согласовать с подачей воздуха в цилиндры. Однако электроуправляемые дроссели могут получать команды управления крутящим моментом от нескольких источников команд, включая команды от водителя автомобиля. Кроме того, управляющие органы, которые регулируют положение дроссельной заслонки, могут также получать иные сигналы, которые могут содержать требования, противоречащие сигналам или отличающиеся от сигналов, которые участвуют в определении положения дроссельной заслонки. Например, некоторые водители предпочитают управлять автомобилем обеими ногами. В частности, некоторые водители могут одновременно нажимать на акселератор и на тормоз автомобиля для управления его скоростью на криволинейных или угловых участках. Вследствие этого, контроллер автомобиля может одновременно получать команды на разгон и на торможение. При вождении автомобиля с одновременной подачей команд на разгон и торможение может оказаться затруднительным обеспечить водителю нужный уровень управляемости для разгона и торможения автомобиля. Точнее, может оказаться трудным обеспечить разряжение для приведения в действие тормозов автомобиля для его замедления, а также обеспечить крутящий момент двигателя для плавного разгона автомобиля после того, как тормоза будут по меньшей мере частично отпущены.
Раскрытие изобретения
С учетом вышеупомянутых ограничений разработан способ управления двигателем, в котором уменьшают требуемый крутящий момент двигателя в ответ на применение тормоза транспортного средства при условии, когда запрашиваемый крутящий момент двигателя превышает пороговый уровень; и регулируют скорость увеличения требуемого крутящего момента двигателя после отпускания тормоза транспортного средства в зависимости от параметра работы, при этом запрашиваемый крутящий момент двигателя остается по существу постоянным.
За счет снижения крутящего момента во время применения тормоза может быть понижено давление во впускном коллекторе двигателя, так чтобы содействовать водителю при торможении, чтобы усилие в тормозах автомобиля можно было увеличивать, несмотря на то, что двигатель может по прежнему создавать крутящий момент. Кроме того, за счет регулирования скорости роста крутящего момента двигателя, когда запрашиваемый крутящий момент является по существу постоянным, можно управлять ускорением автомобиля, так чтобы обеспечить плавный и предсказуемый разгон после торможения.
Настоящее изобретение имеет несколько преимуществ. Например, данный подход может оказать более эффективную помощь водителю при торможении. Помимо этого, данный подход может сделать разгон автомобиля более эффективным после отпускания тормоза. Кроме того, данный подход может установить приоритет команд на разгон автомобиля и торможение, поступающих от водителя.
Вышеупомянутые и иные преимущества и отличительные признаки настоящего изобретения будут более понятны из последующего подробного описания, как отдельно взятого, так и вместе с прилагаемыми чертежами.
Следует понимать, что содержащиеся в данном разделе сведения приведены с целью ознакомления в упрощенной форме с некоторыми идеями, которые далее рассмотрены в подробном описании. Данный раздел не предназначен для формулирования ключевых или существенных признаков объекта изобретения, объем которого единственным образом определен пунктами формулы изобретения, приведенной после подробного описания. Более того, объект изобретения не ограничен вариантами осуществления, которые решают проблему недостатков, упомянутых выше или в любой другой части данного описания
Краткое описание чертежей
Фиг.1 изображает схему двигателя.
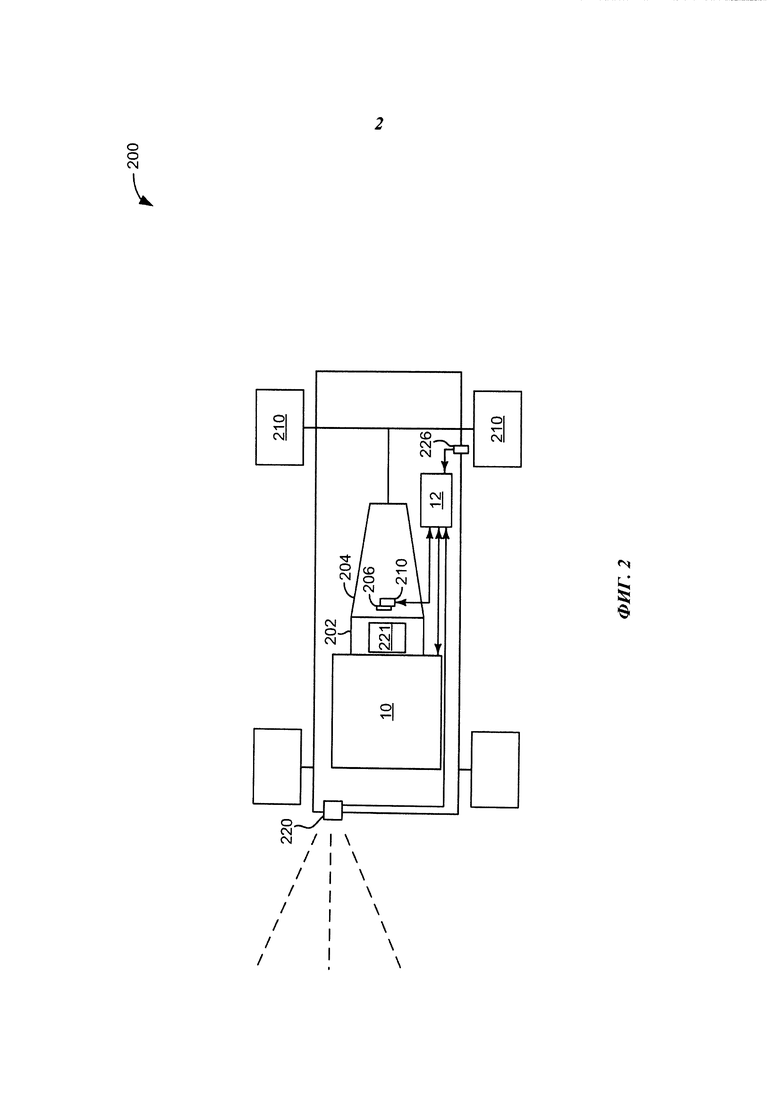
Фиг.2 схематически изображает автомобиль, имеющий в своем составе двигатель фиг.1.
Фиг.3 изображает блок-схему способа управления крутящим моментом двигателя.
Фиг.4 изображает расчетные диаграммы процессов работы двигателя.
Фиг.5 изображает пример блок-схемы алгоритма способа управления двигателем.
Осуществление изобретения
Настоящее изобретение относится к управлению двигателем. Согласно одному примеру, регулирование крутящего момента двигателя производят во время торможения автомобиля по инициативе водителя, так чтобы уменьшить давление во впускном коллекторе, чтобы тем самым помочь водителю в осуществлении торможения. На фиг.1 изображен пример двигателя и усилителя тормозной системы автомобиля. На фиг.2 изображен пример двигателя в составе автомобиля. На фиг.3 изображена блок-схема управления для примера способа управления крутящим моментом двигателя. Способ, соответствующий фиг.3, обеспечивает управление крутящим моментом двигателя во время торможения автомобиля, а также после отпускания тормоза. На фиг.4 изображены диаграммы процессов при торможении автомобиля, когда производится управление крутящим моментом. Наконец, на фиг.5 представлен способ управления крутящим моментом, соответствующий диаграммам процессов, показанным на фиг.4.
Согласно фиг.1, двигатель 10 внутреннего сгорания, содержащий несколько цилиндров, один из которых показан на фиг.1, управляется электронным контроллером 12. Двигатель 10 содержит камеру сгорания 30 и стенки 32 цилиндра с расположенным внутри поршнем 36, который соединен с коленчатым валом 40. Показано, что камера 30 сгорания сообщается с впускным коллектором 44 и выпускным коллектором 48 через соответствующие впускной клапан 52 и выпускной клапан 54. Каждый впускной и выпускной клапан может быть приведен в действие кулачком 51 клапана впуска и кулачком 53 клапана выпуска. С другой стороны, один или более впускных и выпускных клапанов можно приводить в действие электромеханически при помощи электромагнита. Положение кулачка 51 клапана впуска можно определять датчиком 55 данного кулачка. Положение кулачка 53 клапана выпуска можно определять датчиком 57 указанного кулачка.
Показано, что топливная форсунка 66 расположена так, чтобы производить впрыск топлива непосредственно в цилиндр 30 - такая схема известна специалистам в данной области под названием «прямой впрыск». С другой стороны, возможен впрыск топлива во впускной канал, что специалистам известно под названием «впрыск во впускной канал». Топливная форсунка 66 доставляет жидкое топливо пропорционально длительности импульса сигнала FPW (Fuel Pulse Width), поступающего из контроллера 12. Доставка топлива к топливной форсунке 66 осуществляется топливной системой (не показана), включающей в себя топливный бак, топливный насос и топливную рейку (не показаны). Топливная форсунка 66 снабжается рабочим током от драйвера 68 (усилителя), который реагирует на сигнал от контроллера 12. Кроме того, показано, что впускной коллектор 44 сообщается с электроуправляемым дросселем 62, в котором осуществляется регулирование положения дроссельной заслонки 64 для управления потоком воздуха от воздухозаборника 42 двигателя. Впускной коллектор 44 через трубопровод 142 также создает разряжение в усилителе 140 тормоза. Обратный клапан 144 гарантирует, что течение воздуха происходит от усилителя 140 тормоза к впускному коллектору 44, а не наоборот. Усилитель 140 тормоза увеличивает усилие, прикладываемое ногой 152 водителя через педаль 150 тормоза к главному цилиндру 148 для включения тормозов (не показаны) автомобиля.
Система 88 зажигания, построенная без распределителя, формирует искру зажигания в камере 30 сгорания посредством свечи 92 в ответ на сигнал контроллера 12. Показано, что к выпускному коллектору 48 в точке перед каталитическим нейтрализатором 70 присоединен универсальный датчик 126 для определения содержания кислорода в отработавших газах (UEGO, Universal Exhaust Gas Oxygen). В другом варианте, вместо датчика 126 UEGO может быть установлен датчик содержания кислорода в отработавших газах, имеющий два состояния.
Согласно одному примеру, нейтрализатор 70 может содержать несколько блок-носителей катализатора. Согласно другому примеру, может быть использовано несколько устройств снижения токсичности выбросов, каждое с несколькими блок-носителями катализатора. Согласно одному примеру, нейтрализатор 70 может представлять собой трехкомпонентный каталитический преобразователь.
На фиг.1 показан контроллер 12 в виде традиционного микрокомпьютера, содержащего: микропроцессорное устройство 102 (CPU, Central Processor Unit), порты 104 ввода/вывода (I/O, Input/Output), постоянное запоминающее устройство 106 (ROM, Read-only Memory), оперативное запоминающее устройство 108 (RAM, Random Access Memory), энергонезависимое запоминающее устройство 110 (KAM, Keep Alive Memory) и стандартную шину данных. Контроллер 12, как показано, принимает различные сигналы от датчиков, связанных с двигателем 10 дополнительно к тем сигналам, о которых говорилось выше, включая: сигнал температуры хладагента двигателя (ЕСТ, Engine Coolant Temperature) от датчика 112, связанного с рубашкой 114 охлаждения; сигнал датчика 134 положения, связанного с педалью 130 акселератора, для измерения положения педали акселератора, изменяемого посредством ноги 132; сигнал датчика 154 положения, связанного с педалью 150 тормоза, для измерения положения педали тормоза; сигнал датчика 146 давления для измерения разряжения в усилителе тормоза; сигнал датчика 147 давления для измерения давления в главном цилиндре (например, давления в гидравлическом тормозе); сигнал датчика детонации для определения воспламенения остаточных газов (не показан); сигнал давления в коллекторе двигателя (MAP, Manifold Pressure) отдатчика 122 давления, связанного с впускным коллектором 44; сигнал положения органов двигателя от датчика 118 Холла, определяющего положение коленчатого вала 40; сигнал массы воздуха, поступающей в двигатель, от датчика 120 (например, электрического теплового датчика расхода воздуха с проволочным элементом); и сигнал положения дроссельной заслонки от датчика 58. Может также производиться измерение барометрического давления (датчик не показаны) для обработки контроллером 12. Согласно предпочтительному варианту осуществления изобретения, датчик 118 положения органов двигателя за каждый оборот коленчатого вала вырабатывает установленное число импульсов, следующих друг за другом с равными интервалами, из которых можно определить частоту вращения вала двигателя (RPM, Revolutions per Minute) в оборотах в минуту.
В некоторых вариантах осуществления, в гибридном транспортном средстве двигатель может быть связан с системой электродвигателя/батареи. Гибридное транспортное средство может быть построено по параллельной схеме, последовательной схеме или по варианту или комбинации указанных схем. Кроме того, в некоторых вариантах осуществления могут применяться двигатели с иной схемой, например, дизельный двигатель.
В процессе работы каждый цилиндр двигателя 10 обычно отрабатывает четырехтактный цикл, который включает: такт (ход) впуска, такт сжатия, такт расширения и такт выпуска. Обычно, во время такта впуска выпускной клапан 54 закрыт, а впускной клапан 52 открыт.Воздух поступает в камеру 30 сгорания через впускной коллектор 44, а поршень 36 перемещается на дно цилиндра, так чтобы произошло увеличение объема камеры 30 сгорания. Положение, при котором поршень 36 в конце своего хода (т.е., когда камера 30 сгорания имеет максимальный объем) находится вблизи дна цилиндра, специалисты обычно называют нижней мертвой точкой (BDC, Bottom Dead Center). Во время такта сжатия впускной клапан 52 и выпускной клапан 54 закрыты. Поршень 36 движется в сторону головки цилиндра, так чтобы произошло сжатие воздуха в камере 30 сгорания. Точку, в которой поршень 36 в конце своего хода (т.е., когда камера 30 сгорания имеет минимальный объем) находится вблизи головки цилиндра, специалисты обычно называют верхней мертвой точкой (TDC, Top Dead Center). Затем в ходе процесса, который называется впрыском, топливо вводится в камеру сгорания. Далее, в ходе процесса, который называется зажиганием, производится воспламенение введенного топлива известными средствами, например, посредством искровой свечи 92, что приводит к сгоранию топлива. Во время такта расширения расширяющиеся газы толкают поршень 36 обратно в сторону BDC. Коленчатый вал 40 преобразует движение поршня в крутящий момент вращающегося вала. Наконец, во время такта выпуска, выпускной клапан 54 открывается, чтобы вывести сгоревшую воздушно-топливную смесь в выпускной коллектор 48, при этом поршень 36 возвращается в TDC. Следует отметить, что вышеуказанные процессы описаны примерно, и что временные диаграммы открывания и/или закрывания впускного и выпускного клапанов могут меняться, например, чтобы обеспечить положительное или отрицательное перекрытие состояний клапанов во времени, позднее закрывание впускного клапана или другие различные варианты работы.
На фиг.2 схематически изображен автомобиль, имеющий в своем составе двигатель, представленный на фиг.1. Автомобиль 200 содержит двигатель 10, связанный с трансмиссией 204 через преобразователь 202 крутящего момента. Двигатель 10 создает крутящий момент на колесах 210 автомобиля посредством трансмиссии 204. Контроллер 12 принимает сигналы из двигателя и формирует сигналы управления для двигателя 10 и трансмиссии 204. Контроллер 12 также приводит в действие зубчатые колеса 206, которые можно выбирать посредством муфт 210. Контроллер 12 в процессе работы может также принимать сигналы от датчика 220 объектов и блокировочной муфты 221 преобразователя крутящего момента. Согласно одному примеру, датчик 220 объектов может представлять собой оптический приемо-передающий датчик. Согласно другим примерам, датчик 220 объектов может передавать и принимать звуковые волны. Датчик объектов 220 обеспечивает дистанцию между автомобилем и объектом, находящимся снаружи автомобиля (например, другим транспортным средством). Скорость автомобиля можно измерять датчиком 226 скорости.
Таким образом, системы, изображенные на фиг.1 и 2, предусматривают наличие двигателя, содержащего впускной воздушный тракт с дросселем; педали акселератора; педали тормоза; и контроллера, содержащего инструкции для уменьшения крутящего момента двигателя в ответ на нажатие педали тормоза в условиях, когда положение педали акселератора не указывает на снижение крутящего момента, при этом контроллер содержит дополнительные инструкции для увеличения крутящего момента двигателя после отпускания педали тормоза в зависимости от скорости автомобиля, когда работает двигатель. Таким образом, контроллер может учитывать одновременно поступающие команды на разгон и замедление автомобиля. Двигательная система также содержит электроуправляемый дроссель, и отличается тем, что контроллер содержит дополнительные инструкции для увеличения и уменьшения крутящего момента двигателя путем регулирования положения заслонки электроуправляемого дросселя. Двигательная система дополнительно содержит регулируемый распределительный вал, при этом контроллер содержит дополнительные инструкции для увеличения и уменьшения крутящего момента двигателя путем коррекции положения регулируемого распределительного вала. Двигательная система также отличается тем, что контроллер содержит дополнительные инструкции для вычисления ошибки регулирования - алгебраического суммирования требуемого давления во впускном коллекторе двигателя и фактического давления во впускном коллекторе для определения величины снижения крутящего момента. Двигательная система также отличается тем, что контроллер содержит дополнительные инструкции для определения скорости увеличения крутящего момента двигателя в зависимости от скорости автомобиля. Двигательная система также отличается тем, что контроллер содержит дополнительные инструкции для снижения крутящего момента двигателя в ответ на изменение положения педали акселератора.
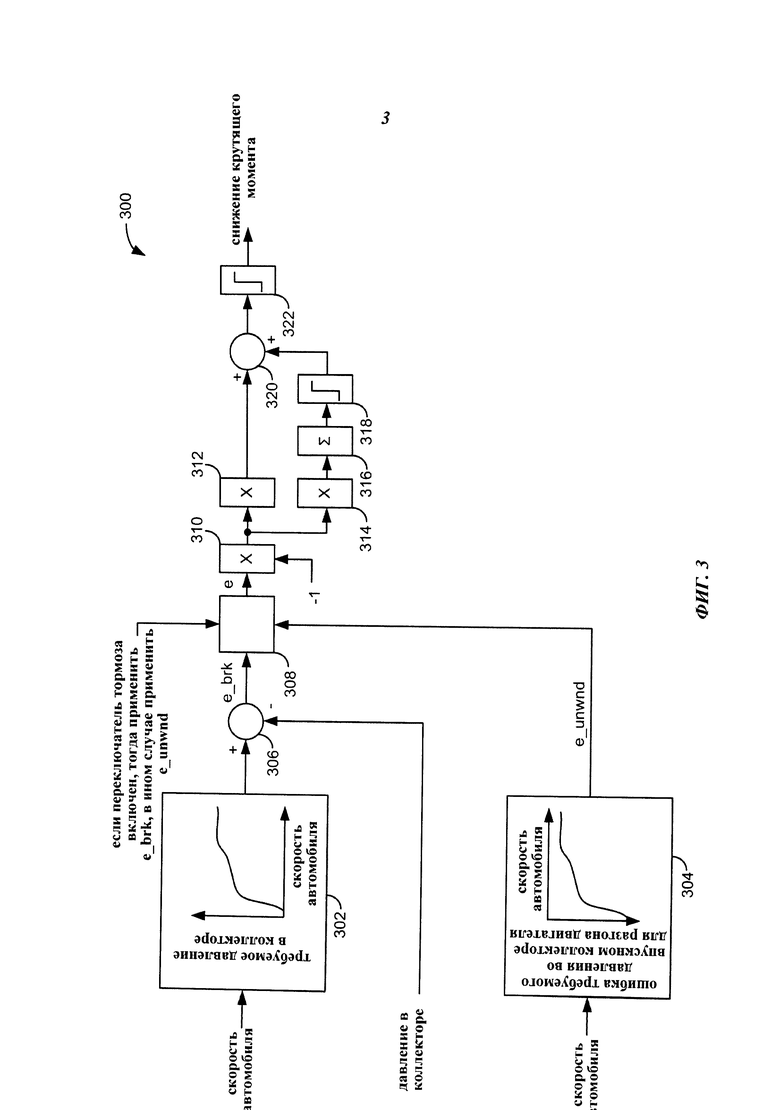
На фиг.3 изображена блок-схема алгоритма способа управления крутящим моментом двигателя. Согласно алгоритму 300 способа, производится прием сигнала давления MAP и сигнала скорости автомобиля. Далее, согласно некоторым примерам, в алгоритме 300 способа может производиться прием сигнала от механизма трансмиссии, сигнала состояния муфты преобразователя крутящего момента, и данных обнаружения объектов. Алгоритм 300 способа может быть исполнен посредством инструкций в контроллере 12, как показано на фиг.1 и 2.
В блоке 302 алгоритм 300 способа обращается к таблице или функции, при этом аргументом является измеренная скорость автомобиля. Выходной величиной, получаемой из таблицы или функции, является требуемое абсолютное давление (MAP) во впускном коллекторе двигателя. Требуемое давление MAP может быть определено эмпирически и сохранено в виде таблицы или функции. Согласно одному примеру, требуемое давление MAP представляет собой давление, которое может помочь водителю при торможении для замедления автомобиля с требуемой величиной отрицательного ускорения. Согласно одному примеру, требуемое давление MAP уменьшается с увеличением скорости движения автомобиля, так чтобы в случае роста скорости автомобиля водитель получал дополнительную помощь при торможении. Таким образом, в тормозах автомобиля может быть обеспечено дополнительное усилие торможения. Величина, полученная из таблицы или функции, направляется в узел 306 суммирования.
В узле 306 суммирования производится вычитание фактического значения MAP из требуемого значения MAP, чтобы получить сигнал e_brk ошибки регулирования. Затем сигнал e_brk ошибки регулирования направляется в блок 308.
В блоке 304 алгоритм 300 способа обращается к таблице или функции, при этом аргументом является измеренная скорость автомобиля. При этом выходной величиной, получаемой из таблицы или функции, является требуемая величина ошибки регулирования MAP для разгона двигателя. Величина ошибки регулирования давления на впуске для разгона двигателя представляет собой переменную, которая увеличивает крутящий момент двигателя путем увеличения MAP после того, как давление во впускном коллекторе было снижено для содействия торможению автомобиля, когда водитель одновременно воздействовал на педаль тормоза и педаль акселератора. Требуемая величина ошибки регулирования MAP для разгона двигателя может быть получена эмпирически, и сохранена в виде таблицы или функции. Согласно одному примеру, требуемая величина ошибки регулирования MAP для разгона двигателя представляет собой величину ошибки, которая может увеличивать крутящий момент двигателя с быстротой, обеспечивающей плавный разгон автомобиля после отпускания педали тормоза. Согласно другим примерам, перечень аргументов указанной таблицы может быть расширен, так чтобы в требуемую величину ошибки регулирования MAP для разгона двигателя могла быть внесена поправка в зависимости от дистанции между автомобилем и объектами, находящимися спереди или сзади автомобиля. Кроме того, требуемая величина ошибки регулирования MAP для разгона двигателя может быть скорректирована в зависимости от состояния муфты преобразователя крутящего момента и/или от выбранной в данный момент времени передачи трансмиссии, связанной с двигателем. Например, при первом состоянии, когда двигатель соединен с трансмиссией, и когда трансмиссия включена на пониженную передачу, а преобразователь крутящего момента разблокирован, требуемая величина ошибки регулирования MAP для разгона двигателя может соответствовать первому значению для оптимизации разгона автомобиля после отпускания педали тормоза. Поскольку исполнение способа, представленного на фиг.3, может осуществляться через выбранные интервалы времени, указанная требуемая величина ошибки регулирования MAP для разгона двигателя корректирует быстроту, с которой происходит увеличение требуемого крутящего момента и MAP. Однако при втором состоянии, если преобразователь крутящего момента заблокирован, а трансмиссия включена на ту же передачу, что и при первом состоянии, требуемую величину ошибки регулирования MAP для разгона двигателя можно уменьшить, так чтобы рост крутящего момента был менее заметен водителю, и управляемость автомобиля была лучше. Таким образом, крутящим моментом, передаваемым от двигателя автомобиля на колеса, можно управлять в зависимости от состояния преобразователя крутящего момента, так чтобы пульсации крутящего момента, передаваемые через трансмиссию автомобиля, были менее заметными.
Аналогично, при первом состоянии, когда двигатель соединен с трансмиссией, и когда трансмиссия включена на пониженную передачу, а преобразователь крутящего момента разблокирован, требуемая величина ошибки регулирования MAP для разгона двигателя может соответствовать первому значению для оптимизации разгона автомобиля после отпускания педали тормоза. Однако при втором состоянии, если трансмиссия включена на повышенную передачу, а преобразователь крутящего момента разблокирован, то чтобы оптимизировать разгон автомобиля, требуемую величину ошибки регулирования MAP для разгона двигателя можно увеличить по сравнению с ее значением для первого состояния. Поскольку трансмиссия включена на повышенную передачу, то увеличенная быстрота, с которой нарастает крутящий момент двигателя, может быть менее заметна для водителя. Величина, полученная из таблицы или функции в блоке 304, передается в блок 308.
В блоке 308 производится запрос состояния переключателя тормоза с целью определения, нажата педаль тормоза или нет. Если тормоз применен, то в блок 310 передается величина e_brk. С другой стороны, если тормоз не применен, то в блок 310 передается величина e_unwnd. Когда в блок 310 передается величина e_brk, крутящий момент двигателя может быть уменьшен или увеличен в зависимости от знака e_brk. Если величина e_brk положительная, то MAP может быть увеличено, чтобы увеличить крутящий момент двигателя. Если величина e_brk отрицательная, то MAP может быть уменьшено, чтобы уменьшить крутящий момент двигателя. Когда в блок 310 передается величина e_unwnd, то может быть произведено увеличение MAP и крутящего момента двигателя. Выходная величина блока 308 обозначена «е», и она является основой для ограничений в блоке 318.
В блоке 310 величина, поступившая из блока 308, умножается на -1, чтобы изменить знак величины, которая поступает в блок 310. Согласно другим вариантам, блок 310 может быть исключен за счет изменения операций в блоке 306 и величин в блоке 304. Сигнал с выхода блока 310 передается в блоки 312 и 314.
В блоке 312 алгоритм 300 способа производит умножение величины, поступившей из блока 310, на коэффициент. Таким образом, осуществляется пропорциональная поправка величины, поступившей из блока 310. Величина, к которой применен поправочный коэффициент, из блока 312 подается в узел 320 суммирования.
В блоке 314 алгоритм 300 способа производит умножение величины, поступившей из блока 310, на второй коэффициент. Величина, к которой применен второй поправочный коэффициент, подается в блок 316, где подаваемая величина суммируется с другими величинами, к которым был применен второй поправочный коэффициент, и которые взяты из предыдущих циклов исполнения алгоритма 300, таким образом, в блоке 316 производится численное интегрирование выходного сигнала из блока 314. Сигнал с выхода блока 316 направляется в блок 318, где он может быть подвергнут ограничению между максимальным значением, которое определяется выражением 0-(e*Kpe), где e*Kpe - выходной сигнал блока 312, и минимальным значением, которое определяется выражением - TE_Cal_Min-(e*Kpe), где ТЕ_Cal_Min представляет эмпирически установленную калибровочную константу. Таким образом, поправка к крутящему моменту двигателя является накопленной поправкой. Сигнал с выхода блока 318 направляется в узел 320 суммирования.
В узле 320 суммирования алгоритм 300 способа суммирует выходные сигналы из блоков 312 и 318. Узел суммирования передает результат в блок 322. Сигнал с выхода узла 320 суммирования в блоке 322 подвергается ограничению. Согласно одному примеру, минимальное - нулевое значение может из блока 322 проходить на вычисление требуемого крутящего момента двигателя. Кроме того, минимальное значение, определяемое калибровочной константой, может быть установлено эмпирически и может использоваться для ограничения выходного сигнала блока 322.
Таким образом, способ, представленный на фиг.3, предусматривает определение поправки к требуемому крутящему моменту двигателя. Поправка к требуемому крутящему моменту двигателя учитывает факт нажатия или не нажатия тормоза автомобиля, скорость автомобиля, выбранную передачу трансмиссии, дистанцию между автомобилем и объектами и рабочее состояние преобразователя крутящего момента. Указанная поправка к требуемому крутящему моменту двигателя используется для определения собственно требуемого крутящего момента, а также для задания положения распределительного вала и дроссельной заслонки для обеспечения требуемого крутящего момента двигателя.
На фиг.4 изображены диаграммы процессов работы двигателя. Указанные диаграммы могут быть реализованы посредством способа, представленного на фиг.3 и 5, исполняемого контроллером 12, изображенным на фиг.1 и 2.
Первый сверху график на фиг.4 представляет зависимость требуемого крутящего момента двигателя от времени. Требуемый крутящий момент двигателя возрастает в направлении стрелки оси Y. Ось Х представляет время, при этом время увеличивается слева направо.
Второй сверху график на фиг.4 представляет зависимость команды, подаваемой на акселератор автомобиля, от времени. Команда, подаваемая на акселератор, возрастает в направлении стрелки оси Y. Ось Х представляет время, при этом время увеличивается слева направо.
Третий сверху график на фиг.4 представляет зависимость давления (MAP) во впускном коллекторе двигателя от времени. MAP возрастает в направлении стрелки оси Y. Таким образом, разряжение во впускном коллекторе двигателя увеличивается в направлении противоположном стрелке оси Y. Ось Х представляет время, при этом время увеличивается слева направо.
Четвертый сверху график на фиг.4 представляет зависимость нажатия на педаль тормоза от времени. Нажатие на педаль тормоза возрастает в направлении стрелки оси Y. Ось Х представляет время, при этом время увеличивается слева направо.
Пятый сверху график на фиг.4 представляет зависимость скорости автомобиля от времени. Скорость автомобиля возрастает в направлении стрелки оси Y. Ось Х представляет время, при этом время увеличивается слева направо.
Шестой сверху график на фиг.4 представляет зависимость величины снижения крутящего момента двигателя от времени. Величина снижения крутящего момента растет в направлении стрелки оси Y. Например, требуемый крутящий момент двигателя уменьшается в большей степени, когда величина снижения крутящего момента увеличивается в направлении стрелки оси Y. Ось Х представляет время, при этом время увеличивается слева направо.
В момент T0 времени, требуемый крутящий момент и команда, подаваемая на акселератор автомобиля, имеют низкий уровень. Величина MAP двигателя также имеет низкий уровень, поэтому крутящий момент на выходе двигателя имеет низкий уровень. Педаль автомобильного тормоза не нажата, а скорость автомобиля имеет сравнительно низкий уровень. Величина снижения крутящего момента двигателя мала, поскольку тормоз не применен.
В момент T1 времени, команда, подаваемая на акселератор автомобиля, возрастает, а вместе с данной командой возрастет и требуемый крутящий момент двигателя. Команда, подаваемая на акселератор автомобиля, может представлять собой сигнал для определения требуемой величины крутящего момента. Однако, в требуемую величину крутящего момента могут быть введены поправки, учитывающие другие требования к крутящему моменту двигателя, а также запросы на снижение крутящего момента. Давление MAP во впускном коллекторе двигателя увеличивается по мере роста требуемого крутящего момента, так чтобы двигатель мог развивать указанный требуемый крутящий момент. Давление MAP можно регулировать путем регулирования дросселя впускного тракта двигателя и/или фазы срабатывания впускного клапана путем регулирования фазы распределительного вала. В момент T1 времени педаль тормоза не нажата, и скорость автомобиля возрастает по мере роста требуемого крутящего момента. В момент T1 времени дополнительного снижения крутящего момента не производится, поскольку педаль тормоза не нажата.
В момент T2 времени, команда, подаваемая на акселератор автомобиля, уменьшается, и соответственно снижается требуемый крутящий момент двигателя. Давление MAP также снижается по мере откачки воздуха из впускного коллектора двигателя посредством поршней двигателя. Давление MAP снижается со скоростью, которая меньше скорости снижения требуемого крутящего момента, поскольку для откачки воздуха из впускного коллектора двигателя требуется определенное время. Когда требуемый крутящий момент двигателя уменьшается, скорость автомобиля начинает снижаться, поскольку в момент T2 времени крутящий момент на выходе двигателя не достаточен для поддержания скорости автомобиля. В момент T2 времени дополнительного снижения крутящего момента не производится, поскольку педаль тормоза не нажата.
Между моментами T2 и T3 времени скорость автомобиля продолжает снижаться, и происходит нажатие педали тормоза. Однако, дополнительного снижения крутящего момента не производится, поскольку давление MAP имеет низкий уровень.
В момент T3 времени, команда, подаваемая на акселератор автомобиля, увеличивается, и вместе с данной командой возрастает требуемый крутящий момент двигателя. В момент T3 времени педаль тормоза продолжает оставаться нажатой. Когда давление MAP во впускном коллекторе двигателя достигает порогового уровня, который зависит от скорости автомобиля, степень снижения крутящего момента увеличивается, что приводит к уменьшению уровня требуемого крутящего момента, хотя команда, подаваемая на акселератор автомобиля, имеет высокий уровень. Давление MAP достигает уровня, более низкого, чем атмосферное давление, и таким образом может быть получено разряжение для усилителя тормоза, помогающее водителю тормозить автомобиль. Таким образом, давление MAP и крутящий момент двигателя подвергаются ограничению, так чтобы сформировать усилие, помогающее водителю применять тормоз, при одновременном обеспечении крутящего момента двигателя. Согласно некоторым примерам, усилие, прикладываемое к тормозам автомобиля, имеет уровень, который вызывает замедление автомобиля с требуемой быстротой, несмотря на то, что двигатель создает крутящий момент на колесах автомобиля. Таким образом, в некоторых случаях момент силы, прикладываемой к тормозам автомобиля, превосходит создаваемый в колесах крутящий момент.
В момент T4 времени педаль тормоза отпускают. В результате, степень снижения крутящего момента двигателя уменьшается с заданной быстротой, зависящей от скорости автомобиля и других переменных (например, включенной передачи трансмиссии, дистанции от автомобиля до объекта, состояния муфты преобразователя крутящего момента). Другими словами, после отпускания тормоза может быть произведено увеличение крутящего момента двигателя со скоростью, которая зависит от скорости автомобиля, включенной передачи трансмиссии, состояния муфты преобразователя крутящего момента и расстояния от автомобиля до объекта. В результате требуемый крутящий момент двигателя и давление MAP увеличиваются, несмотря на то, что команда, подаваемая на акселератор, остается по существу постоянной.
В момент T5 времени педаль тормоза снова нажимают. Требуемый крутящий момент двигателя снижается, поскольку давление MAP больше давления, соответствующего пороговому крутящему моменту, зависящему от скорости автомобиля. Давление MAP уменьшается, когда уменьшается требуемый крутящий момент двигателя. За счет уменьшения крутящего момента двигателя и давления MAP водитель может получить дополнительную помощь для замедления автомобиля. Поскольку скорость автомобиля в момент T5 более высокая, может быть произведено дополнительное снижение требуемого крутящего момента двигателя, чтобы увеличить усилие торможения. Между моментами T5 и T6 времени требуемый крутящий момент двигателя возрастает, поскольку скорость автомобиля уменьшается; однако, требуемый крутящий момент двигателя возрастает с меньшей быстротой, так что тормозное усилие автомобиля продолжает превалировать над крутящим моментом двигателя, даже когда скорость автомобиля достигает нуля.
В момент T6 времени происходит уменьшение команды, подаваемой на акселератор, в то время как педаль тормоза продолжает оставаться нажатой. Требуемый крутящий момент снижается, так как уменьшена команда, подаваемая на акселератор. А поскольку давление MAP снижено до уровня более низкого, чем требуемое давление MAP, которое зависит от скорости автомобиля, степень снижения крутящего момента двигателя уменьшается. В частности, требуемый крутящий момент получает возможность увеличения, поскольку давление MAP двигателя имеет низкий уровень и степень снижения крутящего момента приближается к нулю; однако, команда, подаваемая на акселератор, имеет низкий уровень, и поэтому крутящий момент двигателя остается низким.
Таким образом, на фиг.4 показано, что требуемый крутящий момент двигателя не подвергается изменениям, пока не производится нажатие педали тормоза. Кроме того, быстрота, с которой крутящему моменту двигателя дают возможность увеличиваться после отпускания тормоза, может зависеть от скорости автомобиля, состояния муфты преобразователя крутящего момента, выбранной передачи трансмиссии и дистанции от автомобиля до объекта.
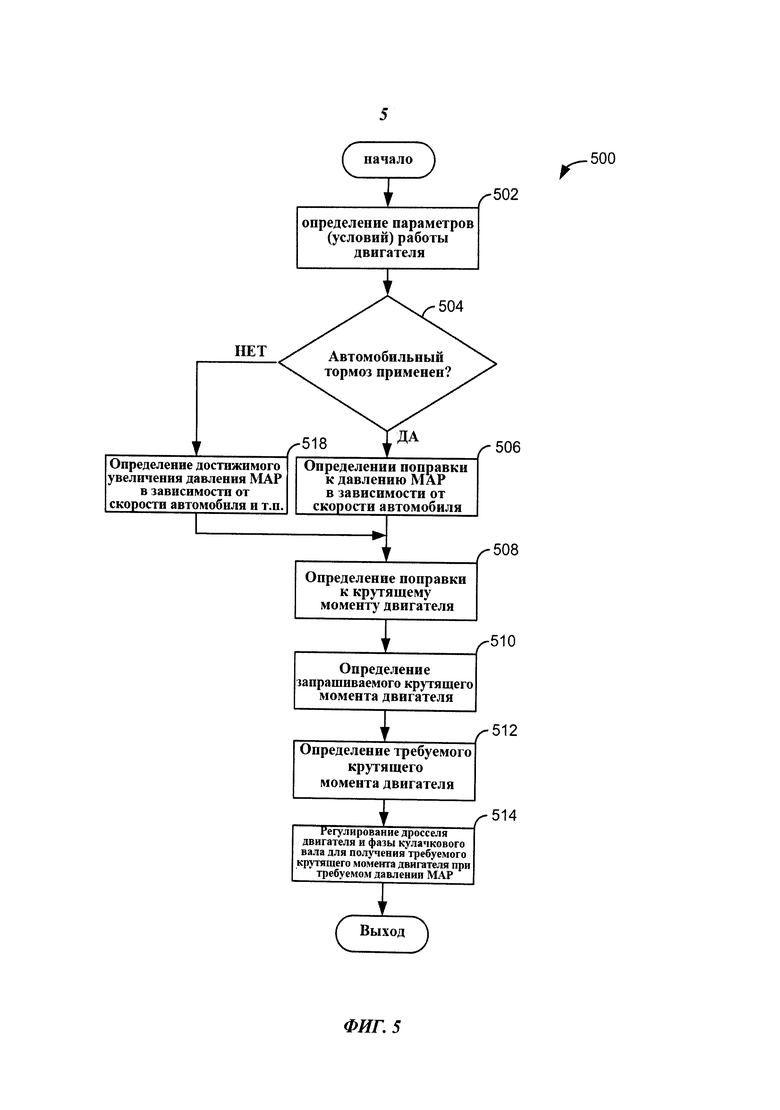
На фиг.5 изображен пример блок-схемы алгоритма способа управления двигателем. Алгоритм 500 способа может быть исполнен посредством инструкций контроллера 12, показанного на фиг.1 и 2. Кроме того, алгоритм 500 может порождать диаграммы процессов, приведенные на фиг.4.
На шаге 502 алгоритма 500 способа производится определение параметров (условий) работы автомобиля и двигателя. В число параметров работы, наряду с другими возможными, могут входить: частота вращения вала двигателя, скорость автомобиля, требуемый крутящий момент двигателя, команда, поступающая на акселератор, дистанция между автомобилем и объектами, выбранная передача трансмиссии, состояние муфты преобразователя крутящего момента, давление MAP, и температура хладагента двигателя. После определения параметров работы алгоритм 500 переходит к шагу 504.
На шаге 504 алгоритм 500 проверяет наличие запроса на торможение автомобиля. Например, алгоритм проверяет, нажата или нет педаль тормоза. Если педаль нажата, то алгоритм переходит к шагу 506. Если нет, то алгоритм переходит к шагу 518.
На шаге 506, в зависимости от скорости автомобиля алгоритм определяет поправку к давлению MAP во впускном коллекторе двигателя. Согласно одному примеру, алгоритм определяет поправку к давлению MAP так, как это было описано в отношении блока 306 на фиг.3. В частности, скорость автомобиля является аргументом для обращения к таблице или функции, на выходе которой получается требуемое давление MAP, зависящее от скорости автомобиля. Согласно одному примеру, требуемое давление MAP может снижаться с увеличением оборотов двигателя, так чтобы оказать дополнительную помощь водителю автомобиля, когда скорость автомобиля велика. Чтобы получить поправку к давлению MAP, производится вычитание фактического давления MAP из требуемого давления MAP. При таком способе, давление MAP во впускном коллекторе двигателя можно уменьшить путем закрывания дросселя, а также установки опережения или запаздывания фазы клапана во время торможения автомобиля, чтобы увеличить прикладываемое тормозное усилие и оказать помощь водителю. После определения поправки к давлению MAP алгоритм 500 переходит к шагу 508.
На шаге 518 алгоритм 500 определяет достижимое увеличение MAP, которое может быть доступным, исходя из скорости автомобиля и других переменных (например, выбранной передачи трансмиссии, состояния блокировки муфты преобразователя крутящего момента, дистанции между автомобилем и объектом). Согласно одному примеру, доступное увеличение MAP определяется в соответствии с тем, как это было описано в отношении блока 304 на фиг.3. В частности, определение требуемого давления MAP для разгона двигателя производится так, чтобы MAP можно было увеличивать в зависимости от требуемой величины разгона. Например, для получения требуемой величины MAP для разгона двигателя можно обращаться к многовходовой таблице с такими аргументами, как: скорость автомобиля, состояние муфты преобразователя крутящего момента, выбранная передача трансмиссии и дистанция между автомобилем и объектом. Значения в ячейках таблицы могут быть определены эмпирически и сохранены в памяти контроллера. Согласно одному примеру, скорость увеличения требуемого крутящего момента двигателя становится больше, когда скорость автомобиля уменьшается. После определения достижимого увеличения MAP алгоритм 500 переходит к шагу 508.
На шаге 508 алгоритм 500 определяет поправку (изменение) крутящего момента двигателя. В одном случае, определение поправки к крутящему моменту двигателя выполняется в соответствии с блок-схемой фиг.3. Точнее, если включается тормоз автомобиля, то поправка к крутящему моменту двигателя может уменьшать давление MAP во впускном коллекторе двигателя и крутящий момент двигателя в зависимости от скорости автомобиля. С другой стороны, если включения тормоза не происходит, то поправка к крутящему моменту двигателя может увеличивать давление MAP и крутящий момент двигателя в зависимости от скорости автомобиля и других переменных (например, выбранной передачи трансмиссии, дистанции от автомобиля до объекта, состояния муфты преобразователя крутящего момента). Регулирование давления MAP и крутящего момента двигателя может осуществлять контроллер по пропорциональному/интегральному закону, как показано на фиг.3. Члены уравнения управления могут быть выражены следующим образом:
где Te_iterm(n) представляет компоненту интегрального регулирования крутящего момента двигателя; e - ошибка регулирования давления MAP, полученная исходя из скорости автомобиля и фактического давления MAP; Kpe - коэффициент в ветви пропорционального регулирования; Ts - интервал времени между взятием отсчетов и циклами исполнения программы; ТЕ_Cal_Min - калибровочная константа; и Kie - коэффициент в ветви интегрального регулирования. Компонента пропорционального регулирования может быть выражена, как:
Te_pterm(n)=e×Kpe
Величина Te_reduction уменьшения крутящего момента двигателя может быть выражена следующим образом:

Таким образом, крутящий момент двигателя и давление MAP во впускном коллекторе двигателя могут быть отрегулированы, чтобы содействовать усилию торможения автомобиля, и создавать при этом крутящий момент на колесах автомобиля. После определения поправки к крутящему моменту двигателя алгоритм 500 переходит к шагу 510.
На шаге 510 алгоритм 500 определяет запрашиваемый крутящий момент. Согласно одному примеру, запрашиваемый крутящий момент двигателя может представлять собой сумму нескольких составляющих крутящего момента двигателя, включая момент, запрашиваемый водителем (например, крутящий момент при торможении), поправку к крутящему моменту, полученную на шаге 508, составляющую момента, обеспечивающую насосное действие цилиндров двигателя, составляющую момента, компенсирующую внутреннее трение в двигателе, и составляющую момента, обеспечивающую привод вспомогательных агрегатов двигателя. Запрашиваемый водителем крутящий момент при торможении можно определить из таблицы в зависимости от выходного напряжения датчика педали акселератора. Согласно одному примеру, составляющую момента, обеспечивающую насосное действие цилиндров двигателя и составляющую момента, компенсирующую внутреннее трение в двигателе, можно определить из следующих уравнений:
PMEP=C0+C1·VIVO+C2·VEVC+C3·VIVC-IVO+C4·N
FMEP=C0+C1·N+C2·N2
где VD - объем вытеснения в цилиндре, FMEP - среднее эффективное давление в цилиндре двигателя, компенсирующее трение, РМЕР - среднее эффективное давление в цилиндре двигателя, обеспечивающее насосное действие, C0-C4 - коэффициенты регрессии, VIVO - объем цилиндра при открывании впускного клапана, VEVC - объем цилиндра при закрывании выпускного клапана, VIVC - объем цилиндра при закрывании впускного клапана, и N - частота вращения вала двигателя. Составляющую момента, обеспечивающую привод вспомогательных агрегатов двигателя, можно определить эмпирически и сохранить в таблице, при обращении к которой аргументом служит частота вращения вала двигателя. После определения требуемого крутящего момента двигателя алгоритм 500 переходит к шагу 514.
На шаге 514 алгоритм 500 осуществляет регулирование положения заслонки дросселя и фазы кулачков, чтобы обеспечить требуемую величину крутящего момента двигателя. Согласно одному примеру, регулирование фазы кулачков может быть выполнено путем подачи масла в исполнительный механизм регулятора фазы. Фаза кулачков и положение дроссельной заслонки зависят от количества воздуха, поступающего в двигатель, который создает требуемый крутящий момент при стехиометрическом воздушно-топливном отношении. Согласно одному примеру, требуемое количество воздуха на впуске в двигатель получается из таблицы, при обращении к которой аргументами служат требуемый крутящий момент и частота вращения вала двигателя. Требуемое количество воздуха на впуске в двигатель и частота вращения вала двигателя являются аргументами для другой таблицы или функции, которая соотносит давление во впускном коллекторе двигателя с воздушным зарядом. Такая таблица или функция может включать в себя ряд прямых линий, которые учитывают различные фазовые углы кулачков и давления во впускном коллекторе. Выбирают прямую, представляющую угол кулачков, при котором объемная эффективность двигателя превышает пороговый уровень, когда двигатель работает с требуемым воздушным зарядом, и переставляют кулачки на указанный угол. Дроссельную заслонку двигателя регулируют по сигналу обратной связи MAP от датчика MAP, устанавливая ее в положение, при котором в цилиндрах двигателя обеспечивается требуемый воздушный заряд. После регулирования положения кулачкового вала и дроссельной заслонки алгоритм 500 заканчивает свою работу.
Таким образом, способы, представленные на фиг.3 и 5, обеспечивают управление двигателем, содержащее: уменьшение требуемого крутящего момента в ответ на применение автомобильного тормоза в условиях, когда запрашиваемый крутящий момент превышает пороговый уровень; и регулирование скорости увеличения требуемого крутящего момента после отпускания тормоза в зависимости от рабочих параметров (условий), в то время как запрашиваемый крутящий момент двигателя остается по существу постоянным. Таким образом, управление автомобилем может быть сделано более совершенным, когда автомобиль одновременно получает команды на разгон и на торможение. Кроме того, поскольку при торможении автомобиля можно обеспечить тормозной момент, превышающий крутящий момент двигателя, то торможению автомобиля может быть отдан более высокий приоритет, чем разгону. Рассматриваемый способ отличается тем, что указанный пороговый уровень представляет собой величину крутящего момента холостого хода двигателя. Способ отличается тем, что уменьшение требуемого крутящего момента двигателя заключается в снижении давления во впускном коллекторе двигателя путем закрытия дросселя воздушной впускной системы двигателя. Способ также отличается тем, что указанным рабочим параметром (условием) является скорость автомобиля.
Способы, представленные на фиг.3 и 5, также отличаются тем, что скорость увеличения требуемого крутящего момента становится больше, когда скорость автомобиля уменьшается. Способ также отличается тем, что уменьшение требуемого крутящего момента двигателя в ответ на применение тормоза производится с быстротой, зависящей от алгебраической суммы требуемого разряжения во впускном коллекторе двигателя и фактического разряжения во впускном коллекторе. Способ также отличается тем, что, когда педаль тормоза автомобиля отпускают, то указанную алгебраическую сумму уменьшают с быстротой, зависящей от скорости автомобиля.
Способы, представленные на фиг.3 и 5, также обеспечивают управление двигателем, содержащее: уменьшение крутящего момента двигателя путем регулирования положения дроссельной заслонки и положения кулачкового вала в ответ на применение автомобильного тормоза при условиях, когда запрашиваемый крутящий момент двигателя превышает пороговый уровень; и регулирование скорости увеличения крутящего момента двигателя в зависимости от скорости автомобиля путем регулирования положения дроссельной заслонки и кулачкового вала в ответ на отпускание тормоза. Способ отличается тем, что для уменьшения крутящего момента двигателя устанавливают запаздывание фазы кулачкового вала. Способ также отличается тем, что для увеличения крутящего момента двигателя устанавливают опережение фазы кулачкового вала. Способ также отличается тем, что крутящий момент двигателя увеличивают в зависимости от скорости автомобиля. Способ также отличается тем, что крутящий момент двигателя увеличивают путем уменьшения накопленной поправки к крутящему моменту.
Способы, представленные на фиг.3 и 5, также отличаются тем, что уменьшение крутящего момента двигателя включает в себя уменьшение давления во впускном коллекторе двигателя путем закрывания дроссельной заслонки впускной воздушной системы двигателя. Способ также отличается тем, что уменьшение крутящего момента двигателя производят в ответ на применение тормоза со скоростью, зависящей от величины алгебраической суммы требуемого разряжения во впускном воздушном коллекторе двигателя и фактического разряжения во впускном воздушном коллекторе.
Специалистам в данной области должно быть понятно, что способ, описанный согласно фиг.3 и 5, может представлять одну или более из любого числа стратегий обработки, которые инициируются событием, прерыванием, являются многозадачными, многопотоковыми, и т.п. Как таковые, различные показанные шаги или функции можно выполнять в той последовательности, какая указана на схеме, но можно выполнять и параллельно или в некоторых случаях опускать. Аналогично, указанный порядок обработки не обязателен для решения вышеупомянутых задач изобретения, реализации отличительных признаков и преимуществ, но приведен в целях упрощения описания. Хотя в явном виде это и не показано, но один или более представленных шагов или функций можно выполнять повторно в зависимости от конкретной используемой стратегии.
На этом описание завершается. Специалистам в данной области должно быть понятно, что в форму и детали осуществления изобретения могут быть внесены изменения, не выходящие за границы идеи и объема изобретения. Например, настоящее описание может также быть с успехом использовано в случае двигателей с расположением цилиндров по схемам I2, I3, I4, I5, V6, V8, V10, V12 и V16, работающих на природном газе, бензине, дизельном топливе или альтернативных видах топлива.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ И СИСТЕМА ДВИГАТЕЛЯ | 2013 |
|
RU2614522C2 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ С НАДДУВОМ, СПОСОБ ДЛЯ ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ДЛЯ ДВИГАТЕЛЯ | 2013 |
|
RU2583173C2 |
| СПОСОБ РАБОТЫ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2015 |
|
RU2698541C2 |
| СПОСОБЫ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2013 |
|
RU2636252C2 |
| СПОСОБ СНИЖЕНИЯ ДАВЛЕНИЯ ВО ВПУСКНОМ КОЛЛЕКТОРЕ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2015 |
|
RU2693369C2 |
| СПОСОБ РАБОТЫ СИСТЕМЫ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2015 |
|
RU2679342C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ДВИГАТЕЛЯ С СИСТЕМОЙ РЕЦИРКУЛЯЦИИ ОТРАБОТАВШИХ ГАЗОВ (ВАРИАНТЫ) | 2015 |
|
RU2692882C2 |
| Способ и система для замедления транспортного средства | 2017 |
|
RU2717608C2 |
| СПОСОБ РАБОТЫ ДВИГАТЕЛЯ (ВАРИАНТЫ), СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 2013 |
|
RU2640146C2 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ЗАПУСКА ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ | 2013 |
|
RU2606160C2 |


Изобретение относится к системе и способу управления двигателем при одновременном воздействии водителя на педаль тормоза и педаль акселератора. Предложен двигатель с тормозной системой с вакуумным усилителем привода и быстрым восстановлением. Согласно одному примеру, регулирование привода осуществляют в зависимости от течения воздуха между усилителем тормоза и впускным коллектором двигателя. Работа двигателя и автомобильных тормозов может быть оптимизирована, особенно когда производится наддув двигателя. Техническим результатом является повышение эффективности торможения, уменьшение временной задержки на разгон автомобиля после отпускания тормоза, а также установка приоритета команд на разгон автомобиля и торможение, поступающих от водителя. 3 н. и 17 з.п. ф-лы, 5 ил.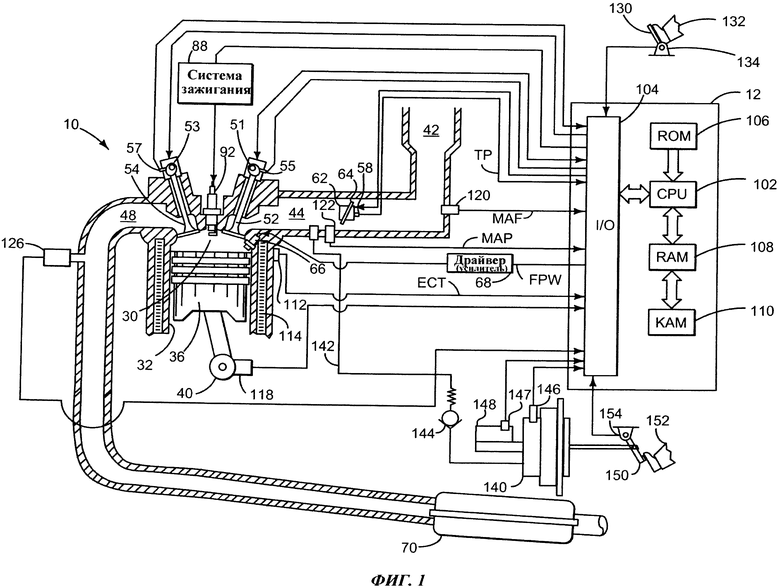
1. Способ управления двигателем, в котором:
уменьшают требуемый крутящий момент двигателя в ответ на применение тормоза транспортного средства при условии, когда запрашиваемый крутящий момент двигателя превышает пороговый уровень; и
регулируют скорость увеличения требуемого крутящего момента двигателя после отпускания тормоза транспортного средства в зависимости от параметра работы, при этом запрашиваемый крутящий момент двигателя остается по существу постоянным.
2. Способ по п.1, отличающийся тем, что пороговый уровень представляет собой величину крутящего момента двигателя в режиме холостого хода.
3. Способ по п.1, отличающийся тем, что уменьшение требуемого крутящего момента двигателя включает в себя снижение давления во впускном коллекторе двигателя путем закрывания дроссельной заслонки впускной воздушной системы двигателя.
4. Способ по п.1, отличающийся тем, что параметром работы является скорость транспортного средства.
5. Способ по п.4, отличающийся тем, что скорость увеличения требуемого крутящего момента двигателя увеличивают при уменьшении скорости транспортного средства.
6. Способ по п.1, отличающийся тем, что требуемый крутящий момент двигателя уменьшают в ответ на применение тормоза транспортного средства на величину, зависящую от алгебраической суммы требуемого разряжения во впускном коллекторе двигателя и фактического разряжения во впускном коллекторе.
7. Способ по п.6, отличающийся тем, что указанную алгебраическую сумму уменьшают на величину, зависящую от скорости транспортного средства, когда производится отпускание тормоза транспортного средства.
8. Способ управления двигателем, в котором:
уменьшают крутящий момент двигателя путем регулирования положения дроссельной заслонки и положения кулачкового вала в ответ на применение тормоза транспортного средства при условии, когда запрашиваемый крутящий момент двигателя превышает пороговый уровень; и
регулируют скорость увеличения крутящего момента двигателя в зависимости от скорости транспортного средства путем регулирования положения дроссельной заслонки и положения кулачкового вала в ответ на отпускание тормоза транспортного средства.
9. Способ по п.8, отличающийся тем, что для уменьшения крутящего момента двигателя положение кулачкового вала смещают в сторону фазового отставания.
10. Способ по п.8, отличающийся тем, что для уменьшения крутящего момента двигателя положение кулачкового вала смещают в сторону фазового опережения.
11. Способ по п.8, отличающийся тем, что крутящий момент двигателя увеличивают в зависимости от скорости транспортного средства.
12. Способ по п.11, отличающийся тем, что крутящий момент двигателя увеличивают посредством уменьшения накопленной поправки к крутящему моменту двигателя.
13. Способ по п.8, отличающийся тем, что уменьшение крутящего момента двигателя включает в себя уменьшение давления во впускном коллекторе двигателя за счет закрывания дроссельной заслонки в воздушной впускной системе двигателя.
14. Способ по п.8, отличающийся тем, что в ответ на применение тормоза транспортного средства крутящий момент двигателя уменьшают на величину, зависящую от алгебраической суммы требуемого разряжения во впускном коллекторе двигателя и фактического разряжения во впускном коллекторе.
15. Двигательная система, содержащая:
двигатель, включающий тракт забора воздуха с дросселем;
акселератор;
исполнительный механизм тормоза; и
контроллер, содержащий инструкции для уменьшения крутящего момента двигателя в ответ на включение исполнительного механизма тормоза при условии, когда положение акселератора не указывает на снижение крутящего момента двигателя, при этом контроллер содержит дополнительные инструкции для увеличения крутящего момента двигателя после отпускания исполнительного механизма тормоза в зависимости от скорости транспортного средства, при которой происходит работа двигателя.
16. Система по п.15, отличающаяся тем, что дополнительно содержит электроуправляемый дроссель, при этом контроллер содержит дополнительные инструкции для увеличения и уменьшения крутящего момента двигателя путем изменения положения заслонки электроуправляемого дросселя.
17. Система по п.15, отличающаяся тем, что дополнительно содержит регулируемый кулачковый вал, при этом контроллер содержит дополнительные инструкции для увеличения и уменьшения крутящего момента двигателя путем изменения положения регулируемого кулачкового вала.
18. Система по п.15, отличающаяся тем, что контроллер содержит дополнительные инструкции для алгебраического суммирования требуемого давления во впускном коллекторе двигателя и фактического давления во впускном коллекторе для определения величины уменьшения крутящего момента двигателя.
19. Система по п.18, отличающаяся тем, что контроллер содержит дополнительные инструкции для определения увеличения крутящего момента двигателя в зависимости от скорости транспортного средства.
20. Система по п.15, отличающаяся тем, что контроллер содержит дополнительные инструкции для уменьшения крутящего момента двигателя в ответ на изменение положения акселератора.
| Система регулирования тягового усилия на ведущих колесах дорожного транспортного средства | 1988 |
|
SU1741607A3 |
| US 4866623 A1, 12.09.1989 | |||
| US 6346064 B1, 12.02.2002 | |||
| US 20100004844 A1, 07.01.2010 | |||
| US 20110231077 A1, 22.09.2011. | |||

